Upload
gokulvarmarajak
View
128
Download
6
Embed Size (px)
DESCRIPTION
Computers in Railways
Citation preview
COMPUTERS INRAILWAYS XII
WIT Press publishes leading books in Science and Technology.Visit our website for the current list of titles.
www.witpress.com
WITeLibraryHome of the Transactions of the Wessex Institute.
Papers presented at COMPRAIL 2010 are archived in the WIT elibrary in volume 114 ofWIT Transactions on The Built Environment (ISSN 1743-3509).
The WIT electronic-library provides the international scientific community withimmediate and permanent access to individual papers presented at WIT conferences.
http://library.witpress.com
TWELFTH INTERNATIONAL CONFERENCE ONCOMPUTER SYSTEM DESIGN AND OPERATION IN RAILWAYS
AND OTHER TRANSIT SYSTEMS
COMPRAIL XII
INTERNATIONAL SCIENTIFIC ADVISORY COMMITTEE
Organised byBeijing Jiaotong University, ChinaWessex Institute of Technology, UK
Sponsored byWIT Transactions on the Built Environment
CONFERENCE CO-CHAIRMEN
C. RobertsUniversity of Birmingham, UK
A.F. RumseyDelcan Corporation, Canada
G. SciuttoUniversit degli Studi di Genova, Italy
N. TomiiChiba Institute of Technology, Japan
E. AriasJ.M. MeraA. RadtkeR. Takagi
P. Tzieropoulos
CONFERENCE CHAIRMEN
B. NingBeijing Jiaotong University, China
C.A. BrebbiaWessex Institute of Technology, UK
NATIONAL PROGRAMME COMMITTEE
J. GuoSouthwest Jiaotong University, China
Y. JiTsinghua University, China
L. JiaBeijing Jiaotong University, China
M. LiChinese Academy of Sciences, China
T. TaoBeijing Jiaotong University, China
WIT Transactions
Editorial Board
Transactions Editor
Carlos BrebbiaWessex Institute of Technology
Ashurst Lodge, AshurstSouthampton SO40 7AA, UKEmail: [email protected]
B Abersek University of Maribor, SloveniaY N Abousleiman University of Oklahoma,
USAP L Aguilar University of Extremadura, SpainK S Al Jabri Sultan Qaboos University, OmanE Alarcon Universidad Politecnica de Madrid,
SpainA Aldama IMTA, MexicoC Alessandri Universita di Ferrara, ItalyD Almorza Gomar University of Cadiz,
SpainB Alzahabi Kettering University, USAJ A C Ambrosio IDMEC, PortugalA M Amer Cairo University, EgyptS A Anagnostopoulos University of Patras,
GreeceM Andretta Montecatini, ItalyE Angelino A.R.P.A. Lombardia, ItalyH Antes Technische Universitat Braunschweig,
GermanyM A Atherton South Bank University, UKA G Atkins University of Reading, UKD Aubry Ecole Centrale de Paris, FranceH Azegami Toyohashi University of
Technology, JapanA F M Azevedo University of Porto, PortugalJ Baish Bucknell University, USAJ M Baldasano Universitat Politecnica de
Catalunya, SpainJ G Bartzis Institute of Nuclear Technology,
GreeceA Bejan Duke University, USAM P Bekakos Democritus University of
Thrace, Greece
G Belingardi Politecnico di Torino, ItalyR Belmans Katholieke Universiteit Leuven,
BelgiumC D Bertram The University of New South
Wales, AustraliaD E Beskos University of Patras, GreeceS K Bhattacharyya Indian Institute of
Technology, IndiaE Blums Latvian Academy of Sciences, LatviaJ Boarder Cartref Consulting Systems, UKB Bobee Institut National de la Recherche
Scientifique, CanadaH Boileau ESIGEC, FranceJ J Bommer Imperial College London, UKM Bonnet Ecole Polytechnique, FranceC A Borrego University of Aveiro, PortugalA R Bretones University of Granada, SpainJ A Bryant University of Exeter, UKF-G Buchholz Universitat Gesanthochschule
Paderborn, GermanyM B Bush The University of Western
Australia, AustraliaF Butera Politecnico di Milano, ItalyJ Byrne University of Portsmouth, UKW Cantwell Liverpool University, UKD J Cartwright Bucknell University, USAP G Carydis National Technical University of
Athens, GreeceJ J Casares Long Universidad de Santiago de
Compostela, SpainM A Celia Princeton University, USAA Chakrabarti Indian Institute of Science,
IndiaA H-D Cheng University of Mississippi, USA
J Chilton University of Lincoln, UKC-L Chiu University of Pittsburgh, USAH Choi Kangnung National University, KoreaA Cieslak Technical University of Lodz,
PolandS Clement Transport System Centre, AustraliaM W Collins Brunel University, UKJ J Connor Massachusetts Institute of
Technology, USAM C Constantinou State University of New
York at Buffalo, USAD E Cormack University of Toronto, CanadaM Costantino Royal Bank of Scotland, UKD F Cutler Royal Botanic Gardens, UKW Czyczula Krakow University of
Technology, PolandM da Conceicao Cunha University of
Coimbra, PortugalL Dvid Kroly Rbert College, HungaryA Davies University of Hertfordshire, UKM Davis Temple University, USAA B de Almeida Instituto Superior Tecnico,
PortugalE R de Arantes e Oliveira Instituto Superior
Tecnico, PortugalL De Biase University of Milan, ItalyR de Borst Delft University of Technology,
NetherlandsG De Mey University of Ghent, BelgiumA De Montis Universita di Cagliari, ItalyA De Naeyer Universiteit Ghent, BelgiumW P De Wilde Vrije Universiteit Brussel,
BelgiumL Debnath University of Texas-Pan American,
USAN J Dedios Mimbela Universidad de
Cordoba, SpainG Degrande Katholieke Universiteit Leuven,
BelgiumS del Giudice University of Udine, ItalyG Deplano Universita di Cagliari, ItalyI Doltsinis University of Stuttgart, GermanyM Domaszewski Universite de Technologie
de Belfort-Montbeliard, FranceJ Dominguez University of Seville, SpainK Dorow Pacific Northwest National
Laboratory, USAW Dover University College London, UK
C Dowlen South Bank University, UKJ P du Plessis University of Stellenbosch,
South AfricaR Duffell University of Hertfordshire, UKA Ebel University of Cologne, GermanyE E Edoutos Democritus University of
Thrace, GreeceG K Egan Monash University, AustraliaK M Elawadly Alexandria University, EgyptK-H Elmer Universitat Hannover, GermanyD Elms University of Canterbury, New ZealandM E M El-Sayed Kettering University, USAD M Elsom Oxford Brookes University, UKA El-Zafrany Cranfield University, UKF Erdogan Lehigh University, USAF P Escrig University of Seville, SpainD J Evans Nottingham Trent University, UKJ W Everett Rowan University, USAM Faghri University of Rhode Island, USAR A Falconer Cardiff University, UKM N Fardis University of Patras, GreeceP Fedelinski Silesian Technical University,
PolandH J S Fernando Arizona State University,
USAS Finger Carnegie Mellon University, USAJ I Frankel University of Tennessee, USAD M Fraser University of Cape Town, South
AfricaM J Fritzler University of Calgary, CanadaU Gabbert Otto-von-Guericke Universitat
Magdeburg, GermanyG Gambolati Universita di Padova, ItalyC J Gantes National Technical University of
Athens, GreeceL Gaul Universitat Stuttgart, GermanyA Genco University of Palermo, ItalyN Georgantzis Universitat Jaume I, SpainP Giudici Universita di Pavia, ItalyF Gomez Universidad Politecnica de Valencia,
SpainR Gomez Martin University of Granada,
SpainD Goulias University of Maryland, USAK G Goulias Pennsylvania State University,
USAF Grandori Politecnico di Milano, ItalyW E Grant Texas A & M University, USA
S Grilli University of Rhode Island, USAR H J Grimshaw Loughborough University,
UKD Gross Technische Hochschule Darmstadt,
GermanyR Grundmann Technische Universitat
Dresden, GermanyA Gualtierotti IDHEAP, SwitzerlandR C Gupta National University of Singapore,
SingaporeJ M Hale University of Newcastle, UKK Hameyer Katholieke Universiteit Leuven,
BelgiumC Hanke Danish Technical University,
DenmarkK Hayami National Institute of Informatics,
JapanY Hayashi Nagoya University, JapanL Haydock Newage International Limited, UKA H Hendrickx Free University of Brussels,
BelgiumC Herman John Hopkins University, USAS Heslop University of Bristol, UKI Hideaki Nagoya University, JapanD A Hills University of Oxford, UKW F Huebner Southwest Research Institute,
USAJ A C Humphrey Bucknell University, USAM Y Hussaini Florida State University, USAW Hutchinson Edith Cowan University,
AustraliaT H Hyde University of Nottingham, UKM Iguchi Science University of Tokyo, JapanD B Ingham University of Leeds, UKL Int Panis VITO Expertisecentrum IMS,
BelgiumN Ishikawa National Defence Academy, JapanJ Jaafar UiTm, MalaysiaW Jager Technical University of Dresden,
GermanyY Jaluria Rutgers University, USAC M Jefferson University of the West of
England, UKP R Johnston Griffith University, AustraliaD R H Jones University of Cambridge, UKN Jones University of Liverpool, UKD Kaliampakos National Technical
University of Athens, GreeceN Kamiya Nagoya University, Japan
D L Karabalis University of Patras, GreeceM Karlsson Linkoping University, SwedenT Katayama Doshisha University, JapanK L Katsifarakis Aristotle University of
Thessaloniki, GreeceJ T Katsikadelis National Technical
University of Athens, GreeceE Kausel Massachusetts Institute of
Technology, USAH Kawashima The University of Tokyo,
JapanB A Kazimee Washington State University,
USAS Kim University of Wisconsin-Madison, USAD Kirkland Nicholas Grimshaw & Partners
Ltd, UKE Kita Nagoya University, JapanA S Kobayashi University of Washington,
USAT Kobayashi University of Tokyo, JapanD Koga Saga University, JapanS Kotake University of Tokyo, JapanA N Kounadis National Technical University
of Athens, GreeceW B Kratzig Ruhr Universitat Bochum,
GermanyT Krauthammer Penn State University, USAC-H Lai University of Greenwich, UKM Langseth Norwegian University of Science
and Technology, NorwayB S Larsen Technical University of Denmark,
DenmarkF Lattarulo Politecnico di Bari, ItalyA Lebedev Moscow State University, RussiaL J Leon University of Montreal, CanadaD Lewis Mississippi State University, USAS lghobashi University of California Irvine,
USAK-C Lin University of New Brunswick,
CanadaA A Liolios Democritus University of Thrace,
GreeceS Lomov Katholieke Universiteit Leuven,
BelgiumJ W S Longhurst University of the West of
England, UKG Loo The University of Auckland, New
Zealand
J Lourenco Universidade do Minho, PortugalJ E Luco University of California at San
Diego, USAH Lui State Seismological Bureau Harbin,
ChinaC J Lumsden University of Toronto, CanadaL Lundqvist Division of Transport and
Location Analysis, SwedenT Lyons Murdoch University, AustraliaY-W Mai University of Sydney, AustraliaM Majowiecki University of Bologna, ItalyD Malerba Universit degli Studi di Bari, ItalyG Manara University of Pisa, ItalyB N Mandal Indian Statistical Institute, India Mander University of Tartu, EstoniaH A Mang Technische Universitat Wien,
AustriaG D Manolis Aristotle University of
Thessaloniki, GreeceW J Mansur COPPE/UFRJ, BrazilN Marchettini University of Siena, ItalyJ D M Marsh Griffith University, AustraliaJ F Martin-Duque Universidad Complutense,
SpainT Matsui Nagoya University, JapanG Mattrisch DaimlerChrysler AG, GermanyF M Mazzolani University of Naples
Federico II, ItalyK McManis University of New Orleans, USAA C Mendes Universidade de Beira Interior,
PortugalR A Meric Research Institute for Basic
Sciences, TurkeyJ Mikielewicz Polish Academy of Sciences,
PolandN Milic-Frayling Microsoft Research Ltd,
UKR A W Mines University of Liverpool, UKC A Mitchell University of Sydney, AustraliaK Miura Kajima Corporation, JapanA Miyamoto Yamaguchi University, JapanT Miyoshi Kobe University, JapanG Molinari University of Genoa, ItalyT B Moodie University of Alberta, CanadaD B Murray Trinity College Dublin, IrelandG Nakhaeizadeh DaimlerChrysler AG,
GermanyM B Neace Mercer University, USA
D Necsulescu University of Ottawa, CanadaF Neumann University of Vienna, AustriaS-I Nishida Saga University, JapanH Nisitani Kyushu Sangyo University, JapanB Notaros University of Massachusetts, USAP ODonoghue University College Dublin,
IrelandR O ONeill Oak Ridge National Laboratory,
USAM Ohkusu Kyushu University, JapanG Oliveto Universit di Catania, ItalyR Olsen Camp Dresser & McKee Inc., USAE Oate Universitat Politecnica de Catalunya,
SpainK Onishi Ibaraki University, JapanP H Oosthuizen Queens University, CanadaE L Ortiz Imperial College London, UKE Outa Waseda University, JapanA S Papageorgiou Rensselaer Polytechnic
Institute, USAJ Park Seoul National University, KoreaG Passerini Universita delle Marche, ItalyB C Patten University of Georgia, USAG Pelosi University of Florence, ItalyG G Penelis Aristotle University of
Thessaloniki, GreeceW Perrie Bedford Institute of Oceanography,
CanadaR Pietrabissa Politecnico di Milano, ItalyH Pina Instituto Superior Tecnico, PortugalM F Platzer Naval Postgraduate School, USAD Poljak University of Split, CroatiaV Popov Wessex Institute of Technology, UKH Power University of Nottingham, UKD Prandle Proudman Oceanographic
Laboratory, UKM Predeleanu University Paris VI, FranceM R I Purvis University of Portsmouth, UKI S Putra Institute of Technology Bandung,
IndonesiaY A Pykh Russian Academy of Sciences,
RussiaF Rachidi EMC Group, SwitzerlandM Rahman Dalhousie University, CanadaK R Rajagopal Texas A & M University, USAT Rang Tallinn Technical University, EstoniaJ Rao Case Western Reserve University, USA
A M Reinhorn State University of New Yorkat Buffalo, USA
A D Rey McGill University, CanadaD N Riahi University of Illinois at Urbana-
Champaign, USAB Ribas Spanish National Centre for
Environmental Health, SpainK Richter Graz University of Technology,
AustriaS Rinaldi Politecnico di Milano, ItalyF Robuste Universitat Politecnica de
Catalunya, SpainJ Roddick Flinders University, AustraliaA C Rodrigues Universidade Nova de Lisboa,
PortugalF Rodrigues Poly Institute of Porto, PortugalC W Roeder University of Washington, USAJ M Roesset Texas A & M University, USAW Roetzel Universitaet der Bundeswehr
Hamburg, GermanyV Roje University of Split, CroatiaR Rosset Laboratoire dAerologie, FranceJ L Rubio Centro de Investigaciones sobre
Desertificacion, SpainT J Rudolphi Iowa State University, USAS Russenchuck Magnet Group, SwitzerlandH Ryssel Fraunhofer Institut Integrierte
Schaltungen, GermanyS G Saad American University in Cairo, EgyptM Saiidi University of Nevada-Reno, USAR San Jose Technical University of Madrid,
SpainF J Sanchez-Sesma Instituto Mexicano del
Petroleo, MexicoB Sarler Nova Gorica Polytechnic, SloveniaS A Savidis Technische Universitat Berlin,
GermanyA Savini Universita de Pavia, ItalyG Schmid Ruhr-Universitat Bochum, GermanyR Schmidt RWTH Aachen, GermanyB Scholtes Universitaet of Kassel, GermanyW Schreiber University of Alabama, USAA P S Selvadurai McGill University, CanadaJ J Sendra University of Seville, SpainJ J Sharp Memorial University of
Newfoundland, CanadaQ Shen Massachusetts Institute of Technology,
USAX Shixiong Fudan University, China
G C Sih Lehigh University, USAL C Simoes University of Coimbra, PortugalA C Singhal Arizona State University, USAP Skerget University of Maribor, SloveniaJ Sladek Slovak Academy of Sciences,
SlovakiaV Sladek Slovak Academy of Sciences,
SlovakiaA C M Sousa University of New Brunswick,
CanadaH Sozer Illinois Institute of Technology, USAD B Spalding CHAM, UKP D Spanos Rice University, USAT Speck Albert-Ludwigs-Universitaet Freiburg,
GermanyC C Spyrakos National Technical University
of Athens, GreeceI V Stangeeva St Petersburg University,
RussiaJ Stasiek Technical University of Gdansk,
PolandG E Swaters University of Alberta, CanadaS Syngellakis University of Southampton, UKJ Szmyd University of Mining and Metallurgy,
PolandS T Tadano Hokkaido University, JapanH Takemiya Okayama University, JapanI Takewaki Kyoto University, JapanC-L Tan Carleton University, CanadaM Tanaka Shinshu University, JapanE Taniguchi Kyoto University, JapanS Tanimura Aichi University of Technology,
JapanJ L Tassoulas University of Texas at Austin,
USAM A P Taylor University of South Australia,
AustraliaA Terranova Politecnico di Milano, ItalyA G Tijhuis Technische Universiteit
Eindhoven, NetherlandsT Tirabassi Institute FISBAT-CNR, ItalyS Tkachenko Otto-von-Guericke-University,
GermanyN Tosaka Nihon University, JapanT Tran-Cong University of Southern
Queensland, AustraliaR Tremblay Ecole Polytechnique, CanadaI Tsukrov University of New Hampshire, USA
R Turra CINECA Interuniversity ComputingCentre, Italy
S G Tushinski Moscow State University,Russia
J-L Uso Universitat Jaume I, SpainE Van den Bulck Katholieke Universiteit
Leuven, BelgiumD Van den Poel Ghent University, BelgiumR van der Heijden Radboud University,
NetherlandsR van Duin Delft University of Technology,
NetherlandsP Vas University of Aberdeen, UKW S Venturini University of Sao Paulo, BrazilR Verhoeven Ghent University, BelgiumA Viguri Universitat Jaume I, SpainY Villacampa Esteve Universidad de
Alicante, SpainF F V Vincent University of Bath, UKS Walker Imperial College, UKG Walters University of Exeter, UKB Weiss University of Vienna, Austria
H Westphal University of Magdeburg,Germany
J R Whiteman Brunel University, UKZ-Y Yan Peking University, ChinaS Yanniotis Agricultural University of Athens,
GreeceA Yeh University of Hong Kong, ChinaJ Yoon Old Dominion University, USAK Yoshizato Hiroshima University, JapanT X Yu Hong Kong University of Science &
Technology, Hong KongM Zador Technical University of Budapest,
HungaryK Zakrzewski Politechnika Lodzka, PolandM Zamir University of Western Ontario,
CanadaR Zarnic University of Ljubljana, SloveniaG Zharkova Institute of Theoretical and
Applied Mechanics, RussiaN Zhong Maebashi Institute of Technology,
JapanH G Zimmermann Siemens AG, Germany
Editors
B. NingBeijing Jiaotong University, China
C.A. BrebbiaWessex Institute of Technology, UK
COMPUTERS INRAILWAYS XII
COMPUTER SYSTEM DESIGN AND OPERATION IN RAILWAYSAND OTHER TRANSIT SYSTEMS
B. NingBeijing Jiaotong University, China
C.A. BrebbiaWessex Institute of Technology, UK
Published by
WIT PressAshurst Lodge, Ashurst, Southampton, SO40 7AA, UKTel: 44 (0) 238 029 3223; Fax: 44 (0) 238 029 2853E-Mail: [email protected]://www.witpress.com
For USA, Canada and Mexico
Computational Mechanics Inc25 Bridge Street, Billerica, MA 01821, USATel: 978 667 5841; Fax: 978 667 7582E-Mail: [email protected]://www.witpress.com
British Library Cataloguing-in-Publication DataA Catalogue record for this book is availablefrom the British Library
ISBN: 978-1-84564-468-0ISSN: 1746-4498 (print)ISSN: 1743-3509 (on-line)
The texts of the papers in this volume were set individually by the authors or under theirsupervision. Only minor corrections to the text may have been carried out by the publisher.
No responsibility is assumed by the Publisher, the Editors and Authors for any injury and/ordamage to persons or property as a matter of products liability, negligence or otherwise, orfrom any use or operation of any methods, products, instructions or ideas contained in thematerial herein. The Publisher does not necessarily endorse the ideas held, or views expressedby the Editors or Authors of the material contained in its publications.
WIT Press 2010
Printed in Great Britain by MPG Books Group, Bodmin and Kings Lynn.
All rights reserved. No part of this publication may be reproduced, stored in a retrievalsystem, or transmitted in any form or by any means, electronic, mechanical, photocopying,recording, or otherwise, without the prior written permission of the Publisher.
Preface
The International Conference on System Design and Operation in Railways andother Transit Systems (COMPRAIL) has become the most successful conferencein its field since it started in 1987. This book contains papers accepted forpresentation at the 12th meeting in the series, held in Beijing, China in 2010.
The book reflects the new achievements and applications of computer basedtechnologies in management, design and operation of passenger and freight transitsystems.
Rail transport has many advantages over other systems in terms of capacity,punctuality, being weather resistant, savings in fuel and land, and fairly low pollution.It is a low-carbon emission transport mode and ought to be the backbone of anyregional and city comprehensive travel system.
Safety is one of the central topics of rail systems, together with efficiency. Computerbased technologies have always played an important role in the safety and efficiencyof transit systems. Many countries have recently become interested in using highspeed railways, resulting in up to now, more than 10,000 km of high speed track inthe world. By 2020, the total length of high speed railways will reach 18,000 km inChina alone. These topics are discussed in this book and it is expected that theywill become even more important in future COMPRAIL meetings.
The above are just some of the themes presented in this volume, which contains asubstantial number of sections covering topics such as: Advanced train control;Traffic control and safety of high-speed railways in Asia; Computer techniques;Planning; Maglev and high speed railways; Metro and other transit systems; Energysupply and consumption; Dynamics and wheel/rail interface; Operations quality;Monitoring and maintenance; Safety and security; Timetable planning.
The Editors are grateful to all the authors for their excellent papers as well as to themembers of the International Scientific Advisory Committee who participated inthe review process. They all contributed to the success of the Conference and thepublication of this book. Their help will ensure the continued success ofCOMPRAIL.
The EditorsBeijing Jiaotong University, China, 2010
Contents
Section 1: Advanced train control Design, development, application, safety assessment and simulation of the railway signaling system B. Ning, T. Tang, C. Gao & J. Xun...................................................................... 3 Research on the simulation of an Automatic Train over speed Protection driver-machine interface based on Model Driven Architecture B. Y. Guo, W. Du & Y. J. Mao ........................................................................... 13 A framework for modeling train control systems based on agent and cellular automata J. Xun, B. Ning & T. Tang ................................................................................. 23 A new train GPS positioning algorithm in satellite incomplete condition based on optimization and the digital track map X. Jia, D. Chen & H. Wang ............................................................................... 35 Simulation of a high-speed train control system based on High Level Architecture and its credibility analysis Wei ShangGuan, J.-Q. Chen, B. Li, L.-N. Guo, M. Li & L.-Y. Chen ................. 45 Research on a hybrid map matching algorithm for Global Navigation Satellite System based train positioning J. Liu, B. Cai, T. Tang, J. Wang & Wei ShangGuan.......................................... 59 Automated system testing of an automatic train protection system B. Friman & T. Andreiouk................................................................................. 71 Design and implementation of a distributed railway signalling simulator X. Hei, W. Ma, L. Wang & N. Ouyang............................................................... 81
Train tracking problem using a hybrid system model Y. Wang, R. Luo, F. Cao & B. Ning................................................................... 89 Latent energy savings due to the innovative use of advisory speeds to avoid occupation conflicts F. Mehta, C. Riger & M. Montigel ................................................................ 99 Section 2: Traffic control and safety of high-speed railways in Asia Special session organised by N. Tomii How the punctuality of the Shinkansen has been achieved N. Tomii ........................................................................................................... 111 Linkage of a conventional line dispatch system with the Shinkansen dispatch system Y. Yoshino ........................................................................................................ 121 Train scheduling of Shinkansen and relationship to reliable train operation S. Sone & Y. Zhongping................................................................................... 133 Rescue operations on dedicated high speed railway lines R. Takagi.......................................................................................................... 141 Track measurement by Kyushu Shinkansen cars in commercial service H. Moritaka & T. Matsumoto .......................................................................... 147 Development of a high-speed overhead contact line measurement device for the Kyushu Shinkansen N. Kinoshita, Y. Himeno & R. Igata ................................................................ 155 The analysis of train reliability for the Taiwan High Speed Rail J.-C. Jong, T.-H. Lin, C.-K. Lee & H.-L. Hu ................................................... 169 Section 3: Communications Development of a railway signaling device based on mixed digital and analog signals using digital signal processors R. Ishikawa, D. Koshino, H. Mochizuki, S. Takahashi, H. Nakamura, S. Nishida & M. Sano............................................................... 183 A multi scalable model based on a connexity graph representation L. Gly, G. Dessagne, P. Pesneau & F. Vanderbeck....................................... 193
Universal communication infrastructure for locomotives U. Lieske .......................................................................................................... 205 Section 4: Computer techniques Research on a novel train positioning method with a single image B. Guo, T. Tang & Z. Yu .................................................................................. 213 Software redundancy design for a Human-Machine Interface in railway vehicles G. Zheng & J. Chen ......................................................................................... 221 Study on the method of traction motor load simulation on railway vehicles F. Lu, S. Li, L. Xu & Z. Yang ........................................................................... 233 Formalizing train control language: automating analysis of train stations A. Svendsen, B. Mller-Pedersen, . Haugen, J. Endresen & E. Carlson.................................................................................................... 245 Design and operation assessment of railway stations using passenger simulation D. Li & B. Han................................................................................................. 257 Modeling of an interoperability test bench for the on-board system of a train control system based on Colored Petri Nets L. Yuan, T. Tang, K. Li & Y. Liu...................................................................... 271 Section 5: Planning How regular is a regular-interval timetable? From theory to application P. Tzieropoulos, D. Emery & D. Tron ............................................................. 283 Port Hinterland traffic: modern planning IT methods A. Radtke.......................................................................................................... 295 Generating optimal signal positions E. A. G. Weits & D. van de Weijenberg........................................................... 307
A method for the improvement need definition of large, single-track rail network analysis and infrastructure using Rail Traffic System Analysis T. Kosonen....................................................................................................... 319 Automatic location-finding of train crew using GSM technology F. Makkinga & B. Sturm.................................................................................. 327 Alignment analysis of urban railways based on passenger travel demand J. L. E. Andersen & A. Landex......................................................................... 337 Maintenance plan optimization for a train fleet K. Doganay & M. Bohlin................................................................................. 349 SAT.engine: automated planning and validation tools for modern train control systems B. Wenzel, J. Schuette & S. Jurtz ..................................................................... 359 Case studies in planning crew members J. P. Martins & E. Morgado ............................................................................ 371 Generating and optimizing strategies for the migration of the European Train Control System C. Lackhove, B. Jaeger & K. Lemmer ............................................................. 383 Synthesis of railway infrastructure J. Spnemann & E. Wendler............................................................................ 395 Dimensioning of a railway station for unknown operation O. Lindfeldt & A.-I. Lundberg ......................................................................... 407 The simulation of passengers time-space characteristics using ticket sales records with insufficient data J.-C. Jong & E.-F. Chang................................................................................ 419 Headway generation with ROBERTO A. D. Middelkoop............................................................................................. 431 Development and implementation of new principles and systems for train traffic control in Sweden B. Sandblad, A. W. Andersson, A. Kauppi & G. Isaksson-Lutteman.................. 441
Section 6: Maglev and high speed railways A model for the coordination between high-speed railway lines and conventional rail lines in a railway passenger transportation corridor Y. Bao .............................................................................................................. 453 Derivation of the safety requirements for control systems based on the interoperability property of the Maglev train W. Zheng, J. R. Meller & K. Li ...................................................................... 467 Dynamic characteristics modelling and adaptability research of the balise transmission module in high speed railways H. Zhao, S. Sun & W. Li .................................................................................. 475 Section 7: Metro and other transit systems CBTC test simulation bench J. M. Mera, I. Gmez-Rey & E. Rodrigo ......................................................... 485 Development of the new CBTC system simulation and performance analysis R. Chen & J. Guo............................................................................................. 497 Efficient design of Automatic Train Operation speed profiles with on board energy storage devices M. Domnguez, A. Fernndez, A. P. Cucala & J. Blanquer ............................ 509 Research on the load spectrum distribution and structure optimization of locomotive traction seats W. Wang, M. Wang & Z. Liu ........................................................................... 521 Generation of emergency scheme for urban rail transit by case-based reasoning F. Li, R. Xu & W. Zhu...................................................................................... 529 Application and perspectives for interoperable systems in Italy and Europe R. Bozzo, R. Genova & F. Ballini .................................................................... 537
Section 8: Energy supply and consumption A method to optimise train energy consumption combining manual energy efficient driving and scheduling C. Sicre, P. Cucala, A. Fernndez, J. A. Jimnez, I. Ribera & A. Serrano.................................................................................................... 549 Driving equipment with three-phase inverters and asynchronous traction motors for trolleys and trams V. Radulescu, I. Strainescu, L. Moroianu, S. Gheorghe, E. Tudor, V. Lupu, F. Bozas, A. Dascalu, G. Mitroi & D. Braslasu ................................ 561 Development, testing and implementation of the pantograph damage assessment system (PANDAS) A. Daadbin & J. Rosinski ................................................................................ 573 Section 9: Dynamics and wheel/rail interface Strategies for less motion sickness on tilting trains R. Persson & B. Kufver.................................................................................... 581 Railway vehicle and bridge interaction: some approaches and applications G. Mikheev, E. Krugovova & R. Kovalev ........................................................ 593 Certain aspects of the CEN standard for the evaluation of ride comfort for rail passengers B. Kufver, R. Persson & J. Wingren ................................................................ 605 Latest development on the simulation of rolling contact fatigue crack growth in rails L. Zhang, S. Mellings, J. Baynham & R. Adey................................................. 615 Section 10: Operations quality Disruption handling in large railway networks F. Corman, A. DAriano & I. A. Hansen ......................................................... 629 A multi-stage linear prediction model for the irregularity of the longitudinallevel over unit railway sections H. Chang, R. Liu & Q. Li................................................................................. 641 Systematic analyses of train run deviations from the timetable T. Richter ......................................................................................................... 651
A novel peak power demand reduction strategy under a moving block signalling system Q. Gu, L. Pei, F. Cao & T. Tang ..................................................................... 663 Section 11: Monitoring and maintenance Development of an ES2-type point machine (monitoring of point machine) N. Obata, T. Ichikura, H. Narita & H. Tanaka................................................ 677 A heuristic approach to railway track maintenance scheduling L. M. Quiroga & E. Schnieder......................................................................... 687 Track test monitoring system using a multipurpose experimental train H. Matsuda, M. Takikawa, T. Nanmoku & E. Yazawa .................................... 701 Section 12: Safety and security Verification of quantitative requirements for GNSS-based railway applications H. Mocek, A. Filip & L. Baant ....................................................................... 711 Modelling and design of the formal approach for generating test sequences of ETCS level 2 based on the CPN X. Zhao, Y. Zhang, W. Zheng, T. Tang & R. Mu.............................................. 723 The experimental evaluation of the EGNOS safety-of-life services for railway signalling A. Filip, L. Baant & H. Mocek ....................................................................... 735 System safety property-oriented test sequences generating method based on model checking Y. Zhang, X. Q. Zhao, W. Zheng & T. Tang ..................................................... 747 Scenario-based modeling and verification of system requirement specification for the European Train Control System W. Tang, B. Ning, T. Xu & L. Zhao ................................................................. 759 ROSA a computer based safety model for European railways J. Schtte & M. Geisler.................................................................................... 771
An IP network-based signal control system for automatic block signal and its functional enhancement K. Hayakawa, T. Miura, R. Ishima, H. Soutome, H. Tanuma & Y. Yoshida .................................................................................................... 783 The improvement of the safety-case process in practice: from problems and a promising approach to highly automated safety case guidance J. R. Meller, W. Zheng & E. Schnieder.......................................................... 795 State-based risk frequency estimation of a rail traffic signal system Y. Zhang, J. Guo & L. Liu................................................................................ 805 Use of model transformation for the formal analysis of railway interlocking models T. Xu, O. M. Santos, X. Ge & J. Woodcock ..................................................... 815 A model-based framework for the safety analysis of computer-based railway signalling systems R. Niu & T. Tang ............................................................................................. 827 A scenario-based safety argumentation for CBTC safety case architecture C. Liu, X. Sha, F. Yan & T. Tang..................................................................... 839 The cost benefit analysis of level crossing safety measures R. Ben Aoun, E.-M. El Koursi & E. Lemaire ................................................... 851 Proposal of the standard-based method for communication safety enhancement in railway signalling systems H.-J. Jo, J.-G. Hwang, B.-H. Kim, K.-M. Lee & Y.-K. Kim ............................. 863 Section 13: Timetable planning A heuristic algorithm for the circulation plan of railway electrical motor units J. Miao, Y. Yu & Y. Wang ................................................................................ 877 Working out an incomplete cyclic train timetable for high-speed railways by computer D. Yang, L. Nie, Y. Tan, Z. He & Y. Zhang...................................................... 889 A novel research on the relation between the number of passengers and the braking distance of a metro L. Wang, Y. Li & X. Hei................................................................................... 901
Computation and evaluation of scheduled waiting time for railway networks A. Landex......................................................................................................... 911 Computation of a suburban night train timetable based on key performance indicators B. Schittenhelm & A. Landex........................................................................... 923 A cooperative strategy framework of train rescheduling for portal junctions leading into bottleneck sections L. Chen, F. Schmid, B. Ning, C. Roberts & T. Tang........................................ 935 Circle rail transit line timetable scheduling using Rail TPM J. Zhibin, G. Jia & X. Ruihua .......................................................................... 945 A simulation analysis of train rescheduling strategies on Chinese passenger dedicated lines Z. He, L. Meng, H. Li & L. Nie ........................................................................ 953 An efficient MIP model for locomotive routing and scheduling M. Aronsson, P. Kreuger & J. Gjerdrum......................................................... 963 Timetable attractiveness parameters B. Schittenhelm ................................................................................................ 975 Author Index .................................................................................................. 985
Section 1 Advanced train control
This page intentionally left blank
Design, development, application, safety assessment and simulation of the railway signaling system
B. Ning, T. Tang, C. Gao & J. Xun The State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, P.R. China
Abstract
The railway signaling system is one of the key subsystems in railway systems to ensure the train operation efficiency and safety. It is a complicated system. However, the railway signaling system is not independent in railway systems. In this paper, five parts of the railway signaling system with their features and the relationship are described in detail. Firstly, the core system of the railway signaling system is designed and developed. Re-design is carried out for the application of the core system for the specified rolling stocks and lines. The safety of the core system and the applied system needs to be assessed. Finally, a complete simulation system should be built for testing, installation, maintenance and the technique upgrading of the systems. This paper helps people to get a deep understanding about the functions, design and development, applications and simulation of railway signaling systems. Keywords: railway signaling system, system design, safety assessment, simulation.
1 Introduction
The railway signaling system is the brain and nerve system of railway systems, which ensures the safety and efficiency of the train operation. However, compared with civil engineering, such as lines, bridges, tunnels, and rolling stock, the cost for a signaling system is relatively low. Generally speaking, it is less than 10% of the whole cost for a railway system. Little attention has been paid give to it, either for the main line railway systems or the underground ones.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 3
doi:10.2495/CR100011
With the quick development of railway systems, especially in the high-speed railways and high-density urban transit systems, the importance of the signaling system has been realized by more and more people. In order to get a better understanding of the railway signaling system, we divide it into the core system, the minimal system and the application system, according to their functions and applications. Meanwhile, design, re-design, simulation, and safety assessment of the railway signaling system in particular are also introduced. There are two typical railway control systems in the world, which have been developed into standardizations. One is the ETCS (European Train Control System) for the railway signaling system in Europe, the other is the CTCS (Chinese Train Control System) for the railway signaling system in China. In this paper, the two systems are taken as examples to show how the signaling systems are designed, developed, re-designed, assessed and simulated. The core systems of a railway signaling system are defined. According to the requirements of the application, the task of the core systems is described. The railway signaling system is a requirements-tailored product for different lines and different rolling stocks. Furthermore, the railway signaling system must be fail-safe and reliable. In the design of the core system and the re-design of an applicable system, some of the special principles must be considered. Therefore, safety assessment must be carried out for the signaling system. In addition, the simulation system has become one of the necessary tools for the design, application and maintenance of the signaling system. Much knowledge is accumulated during the whole cycle of the signaling system, while it is relatively simple from the view of the function points. With the introduction in the following sections, people will understand why the railway signaling system is important, special and high cost.
2 Definition of railway control systems and their core systems
The railway system can generally be divided into three parts shown in Fig. 1.
Rolling Stocklines, bridges and tunnels
Figure 1: The railway system.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
4 Computers in Railways XII
One part is the infrastructure, which includes the lines, bridges, and tunnels. It is called the fixed part of railway Fsystem. The second part is the rolling stock, which is called as the movement part of railway system. The third part is the signaling system, which is called the brain and the nerve system of railway system. As shown in Fig. 1, trains run on the lines controlled by the signaling system in any railway systems. Therefore, the signaling system ensures trains to operate safely and efficiently. The roles and functions of the signaling system in railway systems are clearly stated in Fig. 1. It is obvious the signaling system is the brain and the nerve system of railway system. Without signaling system, railway systems cannot operate efficiently and safely. It also can be seen that the signaling system has close relationship with rolling stocks and infrastructures. The configuration of the signaling system is given in Fig. 2. Usually, there are four parts included in the signaling system: (1) On-board control system, (2) Station control system and wayside system, (3) Central control system, (4) Communication network including mobile telecommunication. The core systems of the signaling system are consisted by the above four parts in Fig. 2. The interlocking system and RBC (Radio Block Control) belong to the station control systems. The on-board control system, control center and the communication system are also one of the core systems for signaling system. In more details, the vital computer for interlocking system, on-board system and RBC system, and the basic software for the four parts are also belong to the core part of the signaling system. In the paper, the core systems are the foundation of the signaling system, and are called as the basic models of the signaling system. Up to now, the functions of the signaling system in railway system, and the relationship between the core systems and the signaling system are explained. When ETCS or CTCS is analyzed, the four parts, or the core systems can be seen easily. In the ETCS, there are Euro-cab, Euro-radio (GSM-R) and Euro-interlocking, etc. In the CTCS, there are Chinese on-board system (Universal cab signaling), GSM-R and Chinese interlocking systems (four kinds of interlocking systems), etc. as in Ning et al. [3].
Figure 2: Configuration of railway signaling.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 5
3 Design and development of the core systems
Interlocking system is one of the core systems for the signaling system. An interlocking system for a typical station layout is firstly designed and developed to ensure a right route establishment. In the interlocking system, the basic interlocking logic relationship among the routes, switches, and signaling must be strictly ensured for the typical station layout. Usually, strict algorithms are used in the core systems to guarantee that conflicting routes can never been established in the same system. After an interlocking system is designed, it must be tested thoroughly. Based on the station layout, a complete test set should be built. Possibly, a simulation system for the interlocking system is designed to test its logic functions. The test will ensure the correctness and the safety of the system. Before an interlocking system is designed, the specifications of the system requirements and the system functions should be finalized. The specifications are the basic files of the design and the test. Of course, the typical station layout must be defined to ensure the functions of the interlocking system to be complete. As the core system, ATP system (one of the on-board system), RBC system, the central control system, and the communication network connecting the core systems should be designed and developed. The processes are the same as the design and development of the interlocking systems. The classification and process can be found in the files of ETCS and CTCS in Ning et al. [3]. In order to design and develop the core system, the prototype for the core system should be designed and developed. Design and development of the prototypes for the core system of the signaling system must obey the design principles of the software engineering. It is divided into the three levels. The first level is the system management level to operate the whole system management including the safety requirement in the vital computer. The second level is to deal with the logic requirements of the systems, i.e. the function rules. The third level is the application level to match function requirements and an application database. Fig. 3 shows the relation of the three levels. The core systems of a signaling system should include six units based on the four parts. They are the central control unit, the station control unit, the RBC control unit, the on-board control unit, the communication network unit and the wayside unit with radio unit. The six units consist into a minimal signaling
Figure 3: Configuration of the software system for a core system.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
6 Computers in Railways XII
Figure 4: Configuration of a minimal signaling system.
system shown in Fig. 4. The minimal signaling system is the foundation of an application signaling system, and meets all the function requirements of a signaling system. Usually, only the prototype of the minimal signaling system can be found in laboratory.
4 Re-design of application of the core system for the specified lines
After development of the core systems for the signaling system, there we have the prototype of the minimal signaling system. Before the application of real signaling system, redesign must be carried out for an applied line based on the core systems and the minimal signaling system. The main task of the redesign is to match the database of a real line and the minimal signaling system with the core systems. The redesign turns the minimal signaling system into a real application signaling system. It needs experts with good skills, while the importance of the step is often ignored. The designers need to know both the core systems and all the requirements of the application line. That is why the signaling system is called as requirements-tailed system, and it costs. During the redesign, the database for the line and rolling stock must be established. For example, some parameters such as curves and slopes of the line, the parameters for rolling stock, traction features and braking features of rolling stock are needed for the on-board system (ATP or ATO). An interlocking system needs the data for the layout of each station along the lines. There is different number of routes for different station. At each station, the number of switches and the positions of switches are different. For the central control system, all the data from the lines and the requirements are needed to general a train plan and a
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 7
train operation graph. At the same time, the disposition of communication network units and wayside units such as position of design for radio units and balises must be carried out. In order to simplify the redesign without reducing the correctness, a computer-aid design (CAD) tool is developed. Different CAD tools are designed for the different units, such as Interlocking CAD tool and RBC CAD tool etc in Mitchell [5]. After the redesign of an application signaling system is finished, the whole system is test to verify the functions and safety. To test the signaling system, a simulation system and environments should be built. Test set and test dictionary for a line should been accumulated and established to ensure the test.
5 Safety assessment
The signaling system is a system to ensure train operation safety. Therefore, it must be self-safety in its whole life cycle. Fail-safe concept was put forward for the railway signaling system in the early 1900s. Safety assessment for the railway signaling system begins with the start of the system design. From the core system design to redesign of an application signaling system, from the prototype of the core systems to the minimal system, from manufacturing to installation, from operation to maintenance, safety assessment must be taken during the whole life cycle. This is the main reason why a signaling system is complicated and high cost. There are always two groups of persons in this area. One is to implement the signaling system. Safety assessment is done by another group to ensure the systems implementing to be monitored. Moreover, the second group should involve from the beginning of the system design. In other word, the whole process of the signaling system design, manufacturing, installation and operation must be monitored and assessed. Methods and principles for software engineering must be used for the files management and flow management to do safety assessments of the signaling system. For a big project of railway signaling, the third professional company is invited to do the safety assessment for the project. What is the meaning for RAMS? The RAMS means Reliability, Availability, Maintainability and Safety of the system. According to EN50126 (CENELEC 1999), the definition of RAMS can be found easily in Theeg and Vlasenko [6]. System reliability is defined as the probability that the system can perform a required function under given conditions for a given time interval. System availability is defined as the ability of a system to be in a state to perform the required function under given conditions over a given time interval, assuming that the required external sources of help is provided. System maintainability is defined as the probability that a given active maintenance action, for a system under given conditions of use, can be carried out within a stated time interval when the maintenance is performed under stated conditions and using stated procedures and resources. System safety is defined as fail-safe requirements that system cannot give dangerous output when a given fault occurs. Reliability and
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
8 Computers in Railways XII
maintainability are both probability values which lead to failure and maintenance rate respectively, related to a defined time period. The signaling system is required to be with high availability, i.e. low failure rate and high maintenance rate. System safety is the system quality requirement, and different with reliability. When the concept, as reliability and safety of railway signaling system, is discussed, there are still some of different views as in Ning et al. [2]. In order to ensure the requirements of RAMS for the signaling system to be satisfied, fault-tolerant design, fault-diagnosis and fault test are applied in the design and redesigned for signaling system development. Comparer is often used in the design of signaling system to fulfill the fail-safe requirement of the system. The comparer can be implemented both by hardware and software. In the safety assessment, a simulation system can also be used to testify if RAMS requirement of the signaling system is performed. It can be used for safety assessment of the core system, the minimal system and the application system of signaling system. Fault set and fault models of signaling system are analyzed and built.
6 Simulation systems
Nowadays, it is difficult to imagine how to design and develop a signaling system based on computers without simulation system tools. Simulation systems for the core system and an application system of the railway signaling system have become an important tool for its development, application and maintenance. As far as the functions of the simulation system are concerned, there are many kinds of simulation systems for the signaling system. Some of them have been mentioned in the paper. Simulation models construction and simulation platforms selection are the first step for development of simulation systems for signaling systems as in Xun et al. [1]. There are numbers of different models and algorithms for the different applications. There are also many kinds of simulation platforms to be selected for development of simulation systems. The above two issues are not addressed in detains here since the limit of the paper contents. As development tool, a simulation system is developed for the design of core signaling systems and the minimal signaling system. By use of the simulation system, the core signaling systems are designed, and their functions, safety and reliability etc. are tested and proved. As design tool, a simulation system is developed for redesigning an application signaling system based on the minimal signaling system. The task of the simulation system is to redesign the application signaling system according to the database of the application line. By use of the simulation system, the requirements and configuration of the application system are satisfied, established, and proved. Usually, a simulation system should be established for an application signaling system. Before the application signaling system is put into operation, the task of the simulation system is to test the functions, safety and fault-tolerant features of the application signaling system and to ensure the correct connection
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 9
among the core signaling systems based on the database of the application line. After the application signaling system is put into operation, the task of the simulation system is to monitor the operation of the application system by sharing the real-time data with the operating system. Meanwhile, as maintenance tool, the simulation system plays an important role in diagnosing a fault and maintaining the system when the fault occurs during the operation of the application system. Moreover, when some of the parts in the application system are revised or upgraded technically, the parts should be tested firstly in the simulation system before be put into the real system. It can be seen from the above description that the simulation systems have the different classifications and functions. A common databases, test sets and function models should be established and accumulated. The different simulation systems could use the same database, the same test set and the same function models. Interlocking system can be taken as an example. Interlocking function test are the same at the core system development and an application signaling system. As a design tool during the redesign for an application system, it uses the same database with the simulation system of an application signaling system. One of the difficult tasks is to establish a perfect test sets by use of accumulating.
7 Conclusion
To get a better understand on the railway signaling system, in the paper, its design and development are defined as the two periods: core system design and application system design, as shown in Fig. 5. It is also introduced in details how simulation systems and safety assessment play an important role in the whole life cycle of a signaling system. The relationship between the phases and systems is
Figure 5: The phases of the signaling system.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
10 Computers in Railways XII
explained. The key points at each phase are described. This paper gives an overall picture and the whole process of railway signaling system. It shows the importance of the railway signaling system.
Acknowledgement
The research is supported by the National Science foundation: Basic theories and key technologies of train control and organization (60634010).
References
[1] Xun, J., Ning, B. & Li, K., Multi-objective optimization method for the ATO system using Cellular Automata. Computers in Railways XI -Computer System Design and Operation in the Railway and Other Transit Systems. vol. 103, eds. Allan, J., Arias, E., Brebbia, C. A., Goodman, C. J., Rumsey, A. F., Sciutto, G. & Tomii, N., WIT Press: Toledo, pp. 173-182, 2008.
[2] Ning, B., Tang, T., Qiu, K. & Gao, C., CBTC (Communication Based Train Control): system and development, Computers in Railways X-Computer System Design and Operation in the Railway and Other Transit Systems. vol. 103, eds. Allan, J., Brebbia, C. A., Rumsey, A. F., Sciutto, G., Sone, S. & Goodman, C. J., WIT Press: Prague, Czech Republic, pp. 413-420, 2006.
[3] Ning, B., Tang, T., Qiu, K., Gao, C. & Wang, Q., CTCS-Chinese Train Control System, Computers in Railways IX-Computer System Design and Operation in the Railway and Other Transit Systems. vol. 103, eds. Allan, J., Brebbia, C. A., Hill, R. J., Sciutto, G., & Sone, S., WIT Press: Dresden, Germany, pp. 262-272, 2004.
[4] Rail Safety and Standards Board, Engineering safety Management (the Yellow Book).
[5] Mitchell, L., The Sustainable Railway Use of Advisory Systems for Energy Savings, IRSE NEWS 151, pp. 2-7, 2009.
[6] Theeg, G. & Vlasenko, S., Railway Signalling and Interlocking, Eurail Press, pp. 17-21 and pp. 30- 36, 2009.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 11
This page intentionally left blank
Research on the simulation of an Automatic Train over speed Protection driver-machine interface based on Model Driven Architecture
B. Y. Guo, W. Du & Y. J. Mao State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, China
Abstract
The principle of Model Driven Architecture (MDA) was drawn into the emulation research of an Automatic Train over speed Protection (ATP) driver-machine interface (DMI). To realize the functions of the DMI, a new method based on the MDA principle was raised. Specific to the requirement of the DMI, the ICV (Core Interface-Frame Controller-View) model was proposed. This is the Platform Independent Model of the ATP driver-machine interface. ICV is a View-centred GUI model that includes a Core Interface and a Frame Controller. The View was used for the description of interface visualization. The Frame Controller accomplished the communication between the driver and the on-board vital computer (VC) by the display of different views. The Core Interface provided the information bridge among View, the driver and VC. Then the detailed transform rules from the Platform Independent Model to the Platform Specific Model were drawn up. The transform rules were separated into two parts. One part realized the core communication function to ensure the accuracy of the system communication interface by the auto-transform method and, according to the definition of the Platform Independent Model, the other part built each module of the ICV model using manual mode. The ultimate complete ATP driver-machine interface system satisfied the emulation requirements, and has been used for the research of the evaluation and testing on the CTCS-3. Keywords: ATP driver-machine interface, MDA, GUI model, simulation.
Computers in Railways XII 13
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
doi:10.2495/CR100 102
1 Introduction
The control of operation signalling for Railway China has developed from manual operation by drivers, who follow the traffic command of ground signals, to automatic speed control by the Train Controlling System, which receives the information sent from the ground [1]. The ATP (Automatic Train over speed Protection) driver-machine interface is displayed at the centre of a LCD monitor, which is configured with a speaker and a keyboard. Drivers are notified with all kinds of information about the train and status of the ATP by sound and graphical information, and then are able to change its working mode and status by input through the keyboard. As a media of displaying the train information and speed command, the human-machine interface is the only interface to communicate with the backend train running control system; it plays an important role in the running process of the train as its normal display affects the arrival time and safety of the train. The CTCS-3 simulation and testing platform is a research platform hosted by the National Key Laboratory of Rail traffic Control and Security, Beijing Jiaotong University, in order to make researches on systems and solutions, and evaluate the equipment testing for the CTCS-3. This system includes the train security computer, track information receiving unit, transponder information receiving unit, speed sensor, human-machine interface and 3D scene, to simulate the train running environment to be as real as possible. The simulation of the ATP driver-machine interface has a great significance in the implementation of a simulation platform of the entire train control system. The principle of Model Driven Architecture (MDA) was drawn into the emulation research of the ATP driver-machine interface (DMI). To realize the functions of the DMI, a new method based on the MDA principle was raised. Specific to the requirements of the DMI, the ICV (Core Interface-Frame Controller-View) model was proposed. Then the detailed transform rules from the Platform Independent Model to the Platform Specific Model were drawn up. The ultimate complete ATP driver-machine interface system satisfied the emulation requirements, and has been used for the research of the evaluation and testing on the CTCS-3.
2 Simulation method of the ATP driver-machine interface based on MDA
MDA is the collection of a series of Standards (MOF, UML, CWM and XMI) and Technology (CORBA, Java, C++, etc.), which are the basis for supporting MDA [2]. The core idea of MDA is to form a CIM (Computation Independent Model) based on users needs, including the development purposes, performance and requirements of the software to be developed in the system development process [3]. According to the CIM model, using the above standards and technology, the platform-independent, highly summarized models are abstracted and concrete, which are called PIMs (Platform Independent Models). Then, the
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
14 Computers in Railways XII
Requirement Capture
Requirement Analysis Design Coding Testing Release
Computation Independent
Models
PIM PSM Code Code
MDA development process, using PIM as driven.
Figure 1: MDA software development cycle.
transform rules are defined based on the specific implementing technology platform. The PIM is transformed to the PSM through the defined transformation rules and tools, and the PSM will be converted into executable code automatically. The development process of the MDA-based system is shown in Fig. 1. Using MDA, the system development process is detached from the building process of two models: one is the establishment of the PIM; the other is the establishment of the PSM, and the key technology is the conversion between the PIM and the PSM. In the beginning of the system development, the PIM should be established, which is independent of the specific implementation technology and platform and is the high-level abstraction of the system. Then, according to the transformation definition, the PIM is converted into the PSM, which is closely related with the specific implementation technology and platform. The framework of the MDA includes the PIM, PIM description language, transformation rules, PSM, PSM description language and several other elements [4]. In traditional software development processes, the model represents not only the demand, but also the realization of specific technologies. Using MDA, models are classified into PIM, representing demand, and PSM, representing the realization of specific technologies, and therefore, the demand and technologies are related. To develop an ATP driver-machine interface simulation system, the requirement must be analyzed above all, and the function of the ATP driver-machine interface could be described using UML. On top of this, the PIM was established, which did not contain any platform-related details. In the description of the PIM, the demand should be summarized and summed up; restraint describing language should be used to achieve the transformation. After the completion of the PIM description, the PIM was mapped to a particular simulation development platform, and then the PSM was obtained. The PIM-to-PSM transformation rules were divided into two parts. One part is to carry out the communication function, since the core function of the ATP driver-machine interface is to accomplish communication with the Vehicle Computer [5, 6]. In order to ensure the accuracy of communication, the automatic conversion mode was used in this part [7]. The other part is to complete the construction of the modules and interaction among the modules according to the definition of the ICV model. The manual mode was used in this part. The PSM was generated by a combination of these two conversion methods and then the ultimate simulation system was completed. The comparison between the MMI development framework and the MDA development framework is shown below.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 15
CIM
PIM
PSM
Code
Requirement Analysis of ATP Driver-machine Interface
PIM of ATP Driver-machine Interface
Communication Function of ATP Driver-machine
Interface
Construction and Interaction of Modules of ATP Driver-
machine Interface
Simulation Code
MDA Development Framework
ATP Driver-machine Interface Simulation Framework
Figure 2: Development framework of the DMI simulation system.
3 Requirement analysis of the ATP driver-machine interface simulation
The Vehicle Computer sent information to the ATP driver-machine interface at a fixed frequency. The ATP translated the information to a readable data, according to the prior agreed rules, and showed the data on the interface as certain rules. The ATP followed multi-level hierarchical design ideas and was decomposed into various views in its logic functions. Each view could be divided into multiple sub-views and each sub-view was a further decomposition of its parent view. Drivers may make driving operations based on the information displayed in all levels of views, including entering data, such as Driver ID, train number, train length and so on, controlling the train independently for functions such as mitigation and change the running status, and responding to the information sent by the vehicle security computer, such as the need for confirmation of the driver when transforming from CTCS-2 to CTCS-3. The information would be sent back to the Vehicle Computer by the ATP after the driver finishes the operation and then responses were sent back to the ATP after being confirmed by the Vehicle Computer, which formed a closed loop for the information communication. The train initial data, such as Driver ID, train number, train length and so on, are input at the first step when the driver started to drive. Then the start button was pressed. The driver should drive in accordance with the interface display. During driving, the information transmitted from the Vehicle Computer was responded to by the driver and the driver could control the train independently.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
16 Computers in Railways XII
The main responding operations are confirmation of operation level and the status of the front track. From the workflow, the functions and use case of the system were confirmed, including: 1. data display; 2. data input; 3. mode selection; 4. carrier frequency mode selection; 5. selection and confirmation of operating level; 6. release selection; 7. departure selection; 8. driver response. The ATP driver-machine interface shows the information sent by the Vehicle Computer and contacts the Vehicle Computer and the train driver. Therefore, it can be determined that the driver and Vehicle Computer are system participants. The system use case diagram is shown in Fig. 3.
4 Establishment of the PIM for the ATP driver-machine interface
The ATP driver-machine interface is a graphical user interface. To build the PIM of the ATP driver-machine interface based on MDA is to design graphical user interface models at the system point of view. In this research, combined with an
Figure 3: Diagram of the ATP driver-machine interface.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 17
Communication
Communication
Message
Message
Presentation
Communication
Message
VC CoreInterface View
Frame Controller
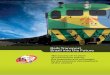
Driver
Figure 4: ICV model.
important GUI model, the Seeheim model [8], a kind of PIM for the ATP driver-machine interface was presented. That was the ICV, the Core Interface-Frame Controller-View model. The ICV was a kind of GUI model whose centre was View, including the Core Interface and Frame Controller. The visible part of the user interface was described by View, and the tasks from the driver and vehicle computer were accomplished by the frame controller through each view. The core interface was used to offer an information exchanging interface for train the driver and the Vehicle Computer. The model is illustrated in Fig 4. Since multi-level hierarchical design ideas were used in the ATP driver-machine interface, the View decomposed the interface into various views in its logic functions. Each view could be divided into multiple sub-views and each sub-view was a further decomposition of its parent view, but the sub-views did not have to be called by parent views, while some shortcut keys were set. Those frequently used sub-views would be called by shortcut keys rather than by parent views, and this facilitated the drivers operation. The static characteristics of the View included size, location and its own form of property, while the dynamic behaviours of the View included the internal action and communication between the View and Vehicle Computer. The View is the core of the ICV model. The View of each level could fulfil its specific function. The hierarchical and modular description of the complex ATP driver-machine interface could be actualized by the use of the View module. The information response was as a core in modelling the View mode. The View dealt with the messages from the Vehicle Computer and driver by the information response process, for example, the current speed display and calling the sub-views. The sub-views of each level in the View mode interacted in-house. Several Views of level 2 and Views of level 3 had the ability of sending information. According to the incoming control information, the corresponding information was sent to the Vehicle Computer. The button information collection process in the model was integrated into the driver module. Since its primary role was to capture the drivers button information and send it to the ATP driver-computer interface by the way of
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
18 Computers in Railways XII
communication, this part was dissociated in the periphery of the ATP driver-computer interface model and it was not necessary to build a separate module for this part. The Driver would be representing this process instead in the model. The Core Interface module had a dual mission. One part was to receive the information from the Vehicle Computer and the other was to receive the drivers button information. It provided an interface between the vehicle equipment and the train driver and established a buffer zone. As a result, the efficiency and maintainability of the code have improved. The main function of the Frame Controller was to receive control information from the Core Interface, which is responsible for switch scheduling among each view and to control the operation of each view. This module was divided into two parts. One part was used to receive the control information from driver and open the appropriate view according to the drivers manipulation. The other part was used to receive the control information from the Vehicle Computer and open the appropriate view according to the incoming message.
5 PSM construction of the ATP driver-computer interface
When the PIM was constructed, the transformation work from the PIM to the PSM could be launched. Because the current transformation tools can only accurately converse the elements of the PIM into the PSM elements, it was necessary to manually complete the construction of the PSM to achieve specific functionality. According to the past practice, the research was divided into two parts and each part of work is as follows. The first part was to mainly complete the communication function, including the following aspects. 1. The elements in the ATPInterface Class of Core Interface, which is the core one in the PIM, should be converted into the corresponding functions elements of the PSM. 2. The operations in the ATPInterface Class of Core Interface, which is the core one in the PIM, should be converted into the corresponding operations of the PSM. 3. The elements in the SendInformation Class of the View in the PIM, which need to communicate with the Vehicle Computer, should be converted into the corresponding functions elements of the PSM. 4. The operations in the SendInformation Class of the View class in the PIM, which need to communicate with the Vehicle Computer, should be converted into the corresponding operations of the PSM. This part is the emphasis of the ATP driver-machine interface simulation, using Rational Rose to automatically generate codes to complete communication between the Vehicle Computer and the ATP driver-computer interface. The tasks to be done in the other part are as follows. 1. Construct the PSM according to each divided class in the PIM. There were three parts of the PIM: the Core Interface, Frame Controller and View. The Core Interface contained two sub-modules: one is in charge of receiving information from the Vehicle Computer; the other is in charge of
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 19
receiving information from the driver. There are also two sub-modules in the Frame Controller. One is responsible for accomplishing the control on the View from the Vehicle Computer, and the other is to accomplish the control on the View from the rail driver. The View module was divided into several sub-modules according to its interface and all these sub-modules were classified in accordance with different view parts. Each sub-module should be described while the PSM is constructed. 2. Information exchange among the PSMs should be completed according to the interaction among the various modules in the PIM. Information exchange is the top priority of the ATP driver-machine interface simulation. After the construction of the PSM, interaction among the various models should be accomplished. The Core Interface module had to achieve the interaction between the Vehicle Computer and the ATP driver- machine interface and interaction between the driver and the ATP driver-machine interface. Then the information coming from these two areas were divided into two parts: one was the data message, which would be sent to the View module to display; the other was the controlling information, which will be sent to the Frame Controller to complete the task of calling for the View. The View received data information from the Core Interface and controlling information from the Frame Controller to display the view. The graphical programming language called G language was used in this part. The PSM description was carried through in the LabVIEW platform. Finally, the simulation system would be finished.
6 ATP driver-machine interface running a typical example
The simulation platform of the ATP driver- machine interface is part of the Rail Control System Simulation Platform in the lab, and has been used for system research, program research and equipment testing and evaluation on the CTCS-3. Fig. 5 shows the ATP driver-machine interface operation chart. In the picture, it can be seen that the ATP driver-machine interface was shown in the centre of the driving devices LCD screen. Speakers and keypad are around the screen,
Figure 5: ATP driver-machine interface operation chart.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
20 Computers in Railways XII
Figure 6: ATP driver-machine interface operation status and the transforming confirmation menu to the CTCS-3.
and the driver can input some relevant information through the keyboard to change the mode of the ATP system and work status. The ATP driver-machine interface can correctly display various status images. This is shown in Fig. 6.
7 Conclusion
The first step of this method was to do a requirement analysis, following which the PIM can be established. Combined with the GUI model, a new model called the ICV (Core Interface-Frame Controller-View) model was proposed as the PIM of the ATP driver-machine interface simulation. The process of transforming from the PIM to the PSM was divided into two parts. One part is to finish the most important section of the ATP driver-machine interface, communication, especially the communication between the Vehicle Computer and the ATP driver-machine interface. The other part was used to establish the PSM according to each module of the PIM and the interaction among the modules. Then the system simulation would be completed. It has been proven that this method saves development time and enhances the portability and accuracy of the system. The ATP driver-machine interface simulation system has been used for the research of evaluation and testing on the CTCS-3.
Acknowledgement
This work is supported by the Key Science and Technology Research Project of the Chinese Ministry of Education (No. 109010).
References
[1] Wang Xi, Tang Tao. Design and Realization of Train Operation Control System Onboard MMI Based on UML. Journal of System Simulation, 18(2), pp. 338-361, 2006.
[2] Heng Xiangan. Research on the Modeling and Simulation Method based on MDA. Changsha: National University of Defense Technology. 2005.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 21
[3] Jishnu Mukerji. Model Driven Architecture-A Technical Perspective. www.omg.org/cgi-bin/doc/ormsc/2001-07-01.
[4] Jiang Chun. MDA Method and MDA Modeling Based on UML. Journal of Shenyang Institute of Engineering: natural Science, 4(1), pp. 67-93, 2008.
[5] Gronbaek, J, Madsen, T.K, Schwefel H.P. Safe Wireless Communication Solution for Driver Machine Interface for Train Control Systems. System, 4, pp. 208-213, 2008.
[6] Ceccarelli A., Majzik I., Lovino D. A Resilient SIL 2 Driver Machine Interface for Train Control Systems. Dependability of Computer, 6, pp. 365-374, 2008.
[7] Deuk Kyu Kum, Soo Dong Kim. A Method to Generate C# Code from MDA/PSM for Enterprise Architecture. Computer and Information Science, 6, pp. 238-243, 2006.
[8] Sun Xiaoping, GUO Tengchong, WEI Mingzhu, etc. A UML-Based Object-Oriented Graphic User Interface Design Model. Computer Science, 30(5), pp. 108-112, 2003.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
22 Computers in Railways XII
A framework for modeling train control systems based on agent and cellular automata
J. Xun, B. Ning & T. Tang The State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, P.R. China
Abstract
A train control system is a system that is geographically and functionally distributed. Its subsystems have a high degree of autonomy. Because of these characteristics, this paper describes a two-layer framework for modeling train control systems. The upper-layer is defined by agents. The lower-layer is the cellular automata (CA) traffic model to simulate the train following dynamic. The CA model delivers the knowledge needed by the agents to make decisions. The interaction between agents can describe the decision-making processes of train control systems to achieve its functions. Its functions are classified into three levels: Service Control Functionality, Signaling Functionalities and Train Operation Functionality. A case study is used to illustrate the applicability of the proposed framework. The study results show that the proposed framework can be successfully used to analyze the influence on traffic flow, which is caused by the train control system. Keywords: modeling, train control system, agent, Cellular Automata (CA).
1 Introduction
A train control system model is an important tool to research train control systems. The previous models are based on the equipments that are used in the practical train control system. For different train control systems, they may have different equipments. In other word, the equipments that constitute the train control system can be tailored towards requirements. This leads to different systems having different system configurations. It is possible to accept the non-uniformity of the configurations in practical projects; however, it is not conducive to understanding the train control system.
www.witpress.com, ISSN 1743-3509 (on-line) WIT Transactions on The Built Environment, Vol 114, 2010 WIT Press
Computers in Railways XII 23
doi:10.2495/CR100031
This problem can be solved by modeling the train control system based on its functions. Its functions are achieved through the equipments in the system. Although the equipments are various and their configurations are distinct, the functions are the same for the different train control systems. It is fundamental to railway control systems that they should be concerned with the positional control of trains [1]. Therefore, the essential purposes of the functions for any train control system are [2, 3]: To maintain a safe distance between following trains on the same track; To safeguard the movement of trains at junctions and where crossing a path
that could be taken by another train; To control train movement between and at stations; To regulate the passage of trains according to the service density and speed
required, accounting for the planned schedule. This places the train control system at the heart of the railway [4].
2 The function-oriented model of train control systems
According to these essential purposes, the functionality of the train control system can be summarized in three levels: Service Control Functionality: The functionality in this level is to maintain
the quality of transportation service, both in normal and abnormal situations. It will compare the real-time traffic status with the schedule and reschedule in order to re