Embed Size (px)
Citation preview

Constructing 3D graph of function with GeoGebra(2D)
Jeong-Eun Park [email protected]
Gyeonggi-Buk Science High School
Young-Hyun Son [email protected]
Gyeonggi-Buk Science High School
O-Won Kwon
Gyeonggi-Buk Science High School
Hee-Chan Yang
Gyeonggi-Buk Science High School
Kyeong-Sik Choi
Seoul National University
Abstract In the secondary school of Korea, students study 3-dimensional figures in the textbook. Without proper model of 3-dimensional space, however,
they have studied 3-dimensional figures. In this study, we constructed the environment of 3-dimensional space in which teachers and students can
handle in perspective of algebra and geometry. As software of 2-dimensional space, GeoGebra is a dynamic mathematics software of integrating
views of algebra and geometry. We expanded the functionality, manipulating mathematical objects in perspective of algebra and geometry
simultaneously, into 3-dimensional space. We created basis of 3-dimensional space using transformation of rotation and projected the basis into
the plane. Then we applied our 3-dimensional space into constructing polyhedron, curves and surfaces in 3-dimensional space.
Key words: GeoGebra, 3-dimension, graphs, perspective of algebra and geometry
1. Introduction
In Korea, many students in the secondary school studies figures in 3-dimensional space. In middle school, from 7th
grade to 9th grade, students studies regular polyhedrons in the textbook. In high school, from 10th grade to 12th grade,
students studies 3-dimensional cartesian space with vector and euclidean geometry. Especially, Korean students
manipulate equations which represents points, curves and surfaces with algebraic equations or vector equations.
In middle school, students sometimes experienced real polyhedrons for understanding properties of 3-dimensional
figures. In high school of Korea, however, students have little chance of experiencing real or cyber 3-dimensional
figures.
Kang and Choi-Koh (1999) studied development of instructional materials for 3-dimensional figures using computer
software. Especially, they proposed some examples of exploring 3-dimensional figures with GSP (Geometer’s
Sketchpad). Their examples were suitable for curriculum of middle school in Korea. In their examples, however,
regular polyhedrons couldn’t be rotated and connected equations.
In this study, we will construct a 3-dimensional space which is projected on 2-dimension space. In other words, we
will define basis of 3-dimensional space and project them into 2-dimensional space. In this space, we can manipulate
points, curves and some surfaces algebraically. Especially, we construct 3-dimensional basis on GeoGebra, which
can manipulate a mathematical object on perspective of algebra and geometry simultaneously.
2. Functionality of GeoGebra
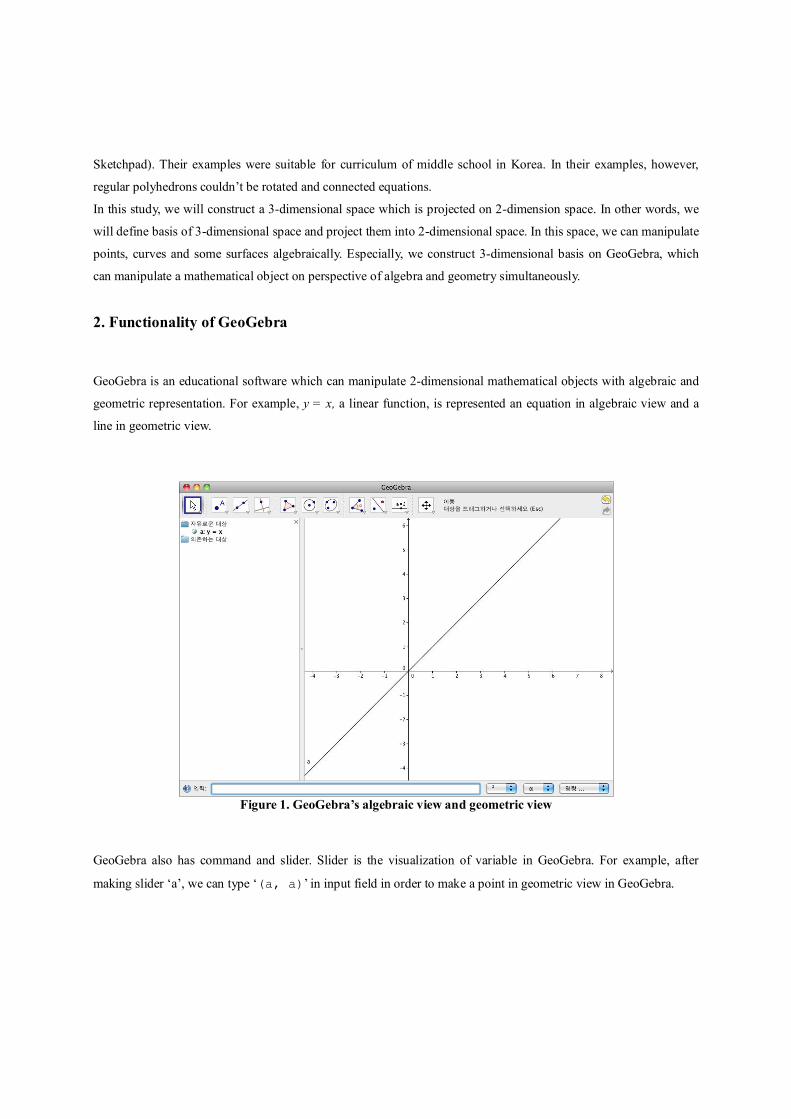
GeoGebra is an educational software which can manipulate 2-dimensional mathematical objects with algebraic and
geometric representation. For example, y = x, a linear function, is represented an equation in algebraic view and a
line in geometric view.
Figure 1. GeoGebra’s algebraic view and geometric view
GeoGebra also has command and slider. Slider is the visualization of variable in GeoGebra. For example, after
making slider ‘a’, we can type ‘(a, a)’ in input field in order to make a point in geometric view in GeoGebra.

Figure 2. Slider and command in GeoGebra
3. Constructing basis in 3-dimension
We will construct 3-dimensional space. Firstly, we will define the set of standard basis in 3-dimensional space. Then,
we will use linear transformation for rotating basis with manipulating matrices in GeoGebra.
3.1 Standard basis in 3-dimensional space in GeoGebra Generally, standard basis B in 3-dimensional space is B = { (1, 0, 0)t, (0, 1, 0)t, (0, 0, 1)t }. In GeoGebra, we define
each column vectors as E_1, E_2 and E_3 respectively. The GeoGebra command is the following.
E_1 = {{1},{0},{0}}
E_2 = {{0},{1},{0}}
E_3 = {{0},{0},{1}}
Then, we make three variables for representing the angles of rotating around x-axis, y-axis and z-axis respectively. In
GeoGebra, we make three sliders as a, b and c. The three basic rotation matrices are the followings.

)cos()sin(0)sin()cos(0
001)(
aaaaaRx ,
)cos(0)sin(010
)sin(0)cos()(
bb
bbbR y ,
1000)cos()sin(0)sin()cos(
)( cccc
cRz
The GeoGebra command is the following.
R_x = {{1,0,0},{0,cos(a),-sin(a)},{0,sin(a),cos(a)}}
R_y = {{cos(b),0,-sin(b)},{0,1,0},{sin(b),0,cos(b)}}
R_z = {{cos(c),-sin(c),0},{sin(c),cos(c),0},{0,0,1}}
Multiplying three basic matrix, Rx(a), Ry(b) and Rz(c), we can get the rotation matrix of a, b, and c.
)()()(),,( cRbRaRcbaR zyxxyz
The GeoGebra command is the following.
R_{xyz} = R_x * R_y * R_z
Now, we multiply Rxyz to each vectors in standard basis of 3-dimensional space. Then we can get e1, e2, e3 which
are vectors rotated by angle a, b, and c.
11 ERe xyz , 22 ERe xyz , 33 ERe xyz
The GeoGebra command is the following.
e1 = R_{xyz} * E_1
e2 = R_{xyz} * E_2
e3 = R_{xyz} * E_3
Then we can get basis BROT = { e1, e2, e3 }, which is rotated by a, b and c.
Next we have to remove an element (the first element) of each vectors of BROT; we cannot represent point which has
3 coordinates in geometric view of GeoGebra, so that we project each vectors to yz-plane.
Finally, we construct a basis B3D= { e1 , e2 , e3 }, which represent 3-dimensional basis projected into 2-dimensional
space. Each vectors of B3D are the followings (The points, V1 , V2 and V3, correspond with the vectors, e1 , e2 and e3).

e_1 = (Element[Element[e1,2],1], Element[Element[e1,3],1])
e_2 = (Element[Element[e2,2],1], Element[Element[e2,3],1])
e_3 = (Element[Element[e3,2],1], Element[Element[e3,3],1])
V_1 = e_1
V_2 = e_2
V_3 = e_3
Figure 3. Constructing 3-dimensional basis on GeoGebra
3. Applications
Before starting this section, we added some decorations in geometric view, x-axis, y-axis, z-axis and each planes,
which can help the figures recognized well in 3-dimensional space.
3.1 Polyhedron We can start the simplest polyhedron, tetrahedron. The four vertices of tetrahedron are the followings.
)0,0,0(1 P , )0,0,2(2 P , )0,3,1(3 P , )3
62,33,1(4 P
We can type the following in GeoGebra input field.

P_1 = 0 V_1 + 0 V_2 + 0 V_3
P_2 = 2 V_1 + 0 V_2 + 0 V_3
P_3 = 1 V_1 + sqrt(3) V_2 + 0 V_3
P_4 = 1 V_1 + sqrt(3)/3 V_2 + 2*sqrt(6)/3 V_3
Figure 4. Tetrahedron in 3-dimensional space
3.2 Curves Next we will draw helix and helix on cone. The coordinate of a point on helix is the following.
)),7sin(),7(cos( ttt , Rt
We can type the following command in GeoGebra input field.
E = cos(7t) V_1 + sin(7t) V_2 + t V_3
In this time, we already defined the variable t as the value of x-coordinate of point A defined. We can draw the locus
(graph) of the point using locus command/tool in GeoGebra. If we type the following command in input field in
GeoGebra, the helix will appear in geometric view of GeoGebra.
locus[E, A]

If we change the command as the following, we can get the graph of helix on a cone (Figure 6).
E = 0.2t*cos(t) V_1 + 0.2t*sin(t) V_2 + 0.3t V_3
Figure 5. Helix in 3-dimensional space
Figure 6. Helix on a cone in 3-dimensional space

3.3 Surfaces We can’t draw surfaces directly in geometric view of GeoGebra; in geometric view, we can’t fill colors in arbitrary
jordan curves. We found some alternative solutions, drawing contours and mapping some lines from xy-
plane(domain) on the surface.
3.3.1 Drawing contours
Firstly, we choose five points of same z-coordinate on a surface. Then, we define a quadratic curve(conic section)
with five points, as we can make a curve with five points chosen using Conic through Five Points tool of GeoGebra.
For example, we can draw surface of revolution of the following equation with axis z.
2
201 yz
GeoGebra command is the following(u is a slider name).
P_1 = u^2 / 20 V_1 + 0 V_2 + u V_3
P_2 = 0 V_1 + u^2 / 20 V_2 + u V_3
P_3 = 0 V_1 - u^2 / 20 V_2 + u V_3
P_4 = -u^2 / 20 V_1 + 0 V_2 + u V_3
P_5 = (u^2 / 20 V_1 + u^2 / 20 V_2)/sqrt(2) + 0 V_2 + u V_3
Another surface is the revolution of the graph of z = √(1+ 1/y). GeoGebra command is the following(u is a slider
name).
P_1 = sqrt(1 + 1/u) V_1 + 0 V_2 + u V_3
P_2 = sqrt(1 + 1/u) V_2 + 0 V_2 + u V_3
P_3 = -sqrt(1 + 1/u) V_2 + 0 V_2 + u V_3
P_4 = -sqrt(1 + 1/u) V_1 + 0 V_2 + u V_3
P_5 = (sqrt(1 + 1/u) V_1 + sqrt(1 + 1/u) V_2)/sqrt(2) + 0 V_2 + u V_3

Figure 7. Revolutions of function
3.3.2 Mapping lines from domain to the surface
In domain, xy-plane, we can make a point go through various paths, especially line paths. The followings are the
lines we defined.
x = - 2, -1.5, - 1, - 0.5, 0, 0.5, 1, 1.5, 2
y = - 2, -1.5, - 1, - 0.5, 0, 0.5, 1, 1.5, 2
We will mapping these lines through some functions into 3-dimensional space using locus command/tool and
spreadsheet view in GeoGebra. Firstly, we will represent the graph of the following equation.
yxz
Figure 8. Graph of z = x + y

In spreadsheet view, we can create the rigid on xy-plane, then map them into 3-dimensional space (Figure 8).
Now we can also create another surface, z = x2 + y2, using spreadsheet view and locus command/tool in GeoGebra
(Figure 9).
Figure 9. Graph of z = x2 + y2
4. Conclusion
We have examined constructing 3-dimensional space on GeoGebra, 2-dimensional dynamic mathematics software,
which can manipulate both of the representations of algebra and geometry of mathematical object. Firstly, we
construct basis of 3-dimensional space which can be rotated by angle variables(sliders in GeoGebra). Based on basis,
we constructed polyhedron, curves and surfaces in 3-dimensional space. Especially, in this construction, we created
the environment in which students and teacher can manipulate mathematical object in perspective of algebra,
cartesian geometry and vector geometry.
5. Reference
Kang, S., & Choi-Koh, S. (1999). Development of instructional materials using computer software, Geometer’s
Sketchpad for enhancing spatial ability in regular polyhedrons. The Mathematical Education, 38(2), 179-187.
Peterson, E. (2007). 3D Coordinate Axes in GeoGebra.
http://www.dean.usma.edu/math/people/Peterson/geogebra/true3d.html