-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
1/185
Continuous Dynamicson Metric Spaces
Craig Calcaterra
29 November 2008Version 1.0
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
2/185
ii
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
3/185
Contents
Preface v
Introduction vii0.1 Context and objective . . . . . . . . . . .
. . . . . . . . . . . . . vii0.2 Example: ows on L2 (R) . . . . . .
. . . . . . . . . . . . . . . . xi0.3 Example: ows on manifolds . .
. . . . . . . . . . . . . . . . . . xiv0.4 Example: ows on a space
with no linear structure . . . . . . . . xxi0.5 Chapter outline . .
. . . . . . . . . . . . . . . . . . . . . . . . . . xxiii0.6
Prerequisites . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . xxv0.7 Abridged version of the book . . . . . . . . . . . . . .
. . . . . . xxv0.8 Acknowledgements . . . . . . . . . . . . . . . .
. . . . . . . . . . xxvi
I Theory 1
1 Flows 31.1 Generating ows with arc elds . . . . . . . . . . .
. . . . . . . . 3
1.1.1 The fundamental theorem . . . . . . . . . . . . . . . . .
. 31.1.2 Local ows . . . . . . . . . . . . . . . . . . . . . . . .
. . 141.1.3 Global ows . . . . . . . . . . . . . . . . . . . . . .
. . . . 17
1.2 Forward ows and xed points . . . . . . . . . . . . . . . . .
. . 191.3 Invariant sets . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 211.4 Commutativity of ows . . . . . . . . . . . .
. . . . . . . . . . . 22
2 Lie algebra on metric spaces 252.1 Metric space arithmetic . .
. . . . . . . . . . . . . . . . . . . . . 252.2 Metric space Lie
bracket . . . . . . . . . . . . . . . . . . . . . . . 312.3
Covariance and contravariance . . . . . . . . . . . . . . . . . . .
34
3 Foliations 413.1 Introduction . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 413.2 Local integrability . . . . . . .
. . . . . . . . . . . . . . . . . . . 503.3 Commutativity of ows .
. . . . . . . . . . . . . . . . . . . . . . 583.4 The Global
Frobenius Theorem . . . . . . . . . . . . . . . . . . . 60
iii
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
4/185
iv CONTENTS
3.5 Control theory . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 65
II Examples 71
4 Brackets on function spaces 73
5 Approximation with non-orthogonal families 835.1 Gaussians . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.1.1 First approximation formula . . . . . . . . . . . . . . .
. . 835.1.2 Signal synthesis . . . . . . . . . . . . . . . . . . .
. . . . . 845.1.3 Deconvolution . . . . . . . . . . . . . . . . . .
. . . . . . 855.1.4 Coefficient formulas . . . . . . . . . . . . .
. . . . . . . . 885.1.5 Instability . . . . . . . . . . . . . . . .
. . . . . . . . . . . 89
5.2 Low-frequency trigonometric series . . . . . . . . . . . . .
. . . . 90
5.2.1 Density in L2 . . . . . . . . . . . . . . . . . . . . . .
. . . 905.2.2 Coefficient formulas . . . . . . . . . . . . . . . .
. . . . . 925.2.3 Damping gives a stable family . . . . . . . . . .
. . . . . . 97
6 Partial differential equations 1016.1 Metric space arithmetic
. . . . . . . . . . . . . . . . . . . . . . . 1016.2 PDEs as arc
elds . . . . . . . . . . . . . . . . . . . . . . . . . . 104
7 Flows on H (Rn ) 1077.1 IFS . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 1077.2 Continuous IFS . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 1097.3 Fixed points .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1127.4
Cyclically attracted sets . . . . . . . . . . . . . . . . . . . . .
. . 114
7.5 Control theory . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 1158 Counter-examples 119
Appendix A: Metric spaces 123.1 Examples . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 123.2 Properties . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 127
.2.1 Regularity . . . . . . . . . . . . . . . . . . . . . . . .
. . . 128
.2.2 Extensions . . . . . . . . . . . . . . . . . . . . . . . .
. . 130.3 Geometric objects . . . . . . . . . . . . . . . . . . . .
. . . . . . 131
.3.1 Triangles . . . . . . . . . . . . . . . . . . . . . . . . .
. . 131
.3.2 Metric coordinates . . . . . . . . . . . . . . . . . . . .
. . 132
.3.3 Conversion formulas . . . . . . . . . . . . . . . . . . . .
. 133
Appendix B: ODEs as vector elds 137
Appendix C: Numerical differentiation 141
List of notation 151
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
5/185
Preface
This book explores the subject of metric geometry using
continuous dynamics.Metric geometry is currently experiencing
intense interest, due to Perelmanssolution of the Poincares
Conjecture and the inuence of Gromovs ideas onstring theory in
physics. Despite this advanced pedigree, metric geometry beginsat a
basic level requiring no more than an undergraduate introduction to
pointset topology and the denition of a distance metric. The novel
perspective of this text is the focus of using ows on an abstract
metric space to crack intogeometric objects such as foliations. The
abstract environment allows us topinpoint the necessary ideas to
make all our analytic constructionswe employthe bare minimum
denitions for creating dynamics, geometric decompositions,and
approximations on metric spaces. This book is written with students
inmind, with the intention of using this minimum apparatus to make
learning andunderstanding the ideas easier. Hopefully the treatment
will be of interest toresearchers as well, being the rst unied
presentation of this dynamic approachto metric geometry. Further,
researchers can use this abstract environment totest the limits of
their understanding of fundamental constructions such as ows,
Lie derivatives, foliations, holonomy and connections.
v
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
6/185
vi PREFACE
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
7/185
Introduction
In this chapter the case is made for the importance of studying
ows on a metricspace. The concept of a metric space is the deepest
point of contact betweengeometry and analysis; we gain new
perspective on these subjects by generalizingseveral of their
results to metric spaces. The generalized Fundamental Theoremof
Ordinary Differential Equations and Frobenius Foliation Theorem are
themajor theoretical results of this book. The rst theorem belongs
to analysisand the second to geometry.
The greater generality also gives a richer palette for
mathematical modeling,as demonstrated with novel dynamics on H (Rn
), the space of nonempty com-pact subsets of Rn . Innovative
dynamics arise even on well-studied spaces. E.g.,geometric control
theory on function spaces leads to our centerpiece
example:low-frequency trigonometric series can approximate any L2
function on any in-terval, Theorem 94 and Example 95, which the
reader can turn to immediately,before learning the details of
metric space dynamics which conceived the idea.
0.1 Context and objectiveA metric space (M, d ) is a set M with
a function d : M M R called themetric which is positive, denite,
symmetric and satises the triangle inequal-ity:
(i) d(x, y ) 0 positivity(ii) d(x, y ) = 0 iff x = y deniteness
( or non-degeneracy)(iii) d(x, y ) = d(y, x ) symmetry(iv) d(x, y )
d(x, z ) + d(z, y) triangle inequality
for all x,y,z M . A metric space is locally complete if for each
elementxM there exists an r > 0 such that the closed ball
B (x, r ) := {yM |d (x, y ) r}is complete. Every major result in
this book is written at this generality, so ourconstant friend is
the triangle inequalityexploited without acknowledgement.The most
important metric spaces include n-dimensional Euclidean space Rn
,Riemannian manifolds and function spaces such as L2 (R). Appendix
A gives
vii
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
8/185
viii INTRODUCTION
denitions for these and other examples and lists general
properties of metricspaces.
The term continuous dynamics, as opposed to discrete dynamics,
meansthe study of ows:
Denition 1 A ow is a continuous map F : M R M which, for all xM
and s, t R, satises (i) F (x, 0) = x(ii ) F (F (x, s ) , t ) = F
(x, s + t).
More efficient notations are
F t (x) := F (x, t ) =: F x (t)
with the space variable x or time parameter t in the subscript,
depending on
which quantity is active in a calculation. Flows will typically
be denoted withF , G, or H .For xed t, a ow gives a map F t : M M
which is necessarily an auto-morphism, i.e., a homeomorphism of M
to itself, since F t is the continuous
inverse of F tF t F t = F 0 = Id .
A ow may thus be viewed as a 1-parameter family of
homeomorphisms. Fromanother point of view, the R parameter t often
signies time, and the map F x :R M then describes the motion of a
xed x through its position/congurationspace M F x (t) for all tR
with initial condition x = F x (0).
Our chief interest is to use continuous dynamics to explore the
geometry
of general metric spaces. Insights into geometric structure, in
turn, give usdeeper understanding of possible dynamics. It is
surprising how many importantgeometrical ideas require only a
metric for their denition. Balls and spheres,of course, are
utilized at the inception of metric spaces. A more extensive listof
static geometric denitions (ellipses, cylinders, etc.) appears on
page 133.Ekelands variational principle and the Mountain Pass
Theorem have naturalexpressions on a metric space [43]. For many
decades algebraic topologistshave been aware that a topology
without further algebraic structure is sufficientto dene
geometrically insightful indices, such as the fundamental
homotopygroup or the homological Conley index [25]. More important
for this book,geometric notions such as curves, surfaces, tangency,
and transversality havenatural expressions on metric spaces. The
generalization of the FundamentalTheorem of Ordinary Differential
Equations to metric spaces ([52], [7], [18], [30])
and Frobenius Foliation Theorem (Chapter 3) are the major
theoretical resultsexplicated in this text. Further, length, speed,
angles, norm, curvature [14],the Lie derivative (Chapter 2),
gradients ([41], [3]) and many others also havenatural and fruitful
generalizations. The spirit that guides the development of metric
geometry is the conviction that every major geometrical result has
asubstantial expression on metric spaces.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
9/185
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
10/185
x INTRODUCTION
space. For instance a curve c : I Rn is differentiable with c
(t0) Rn fort0
I if and only if c is tangent to the curve l (t) := c (t0)+ (
t
t0) c (t0) which
is a line in the direction of c (t0) since
limh0
d (c (t0 + h) , l (t0 + h))h
= limh0
c (t0 + h) c (t0)h c (t0) (2)
where the metric d is derived from the norm, d (x, y ) := x y .
So the smooth-ness of a curve c is determined by its tangency with
a special curve, an arc, l.Remember (Appendix B) nearly any ODE may
be rewritten as a vector eld
problemx = V (x)
where V : Rn Rn is the vector eld and a solution is a curve x 0
: I Rnwith initial condition x 0 (0) = x0Rn satisfyingddt x0 (t) =
V (x 0 (t)) .
The fundamental result of ODEs is: if V is Lipschitz continuous
then there existsa collection of solutions which generates a unique
local ow F (x, t ) := x (t).We generalize this result in Chapter 1
using the idea contained in (2) that acurve can represent a vector
or derivative. In analogy with vectors on a linearspace, we study
arcs on a metric space. Whereas the vector eld V species adirection
V (x)R
n at each point xRn to which solutions must be tangent,
an arc eld X species a direction with an arc at each point x. So
an arc eldis a map X : M [1, 1] M with X (x) : [1, 1] M being the
arc at theposition xM .To make the generalization claimed in the
previous paragraph more concrete,let us show how every vector eld V
may be naturally represented as an arc
eld X . Dene X : Rn
[1, 1] Rn
by X (x, t ) := x + tV (x). If x 0 : I Rn
is a solution to the vector eld problem, then x0 is also tangent
to X at eachvalue tI in the sense that
limh0
d ( (t + h) , X ( (t) , h))h
= 0 .
To check this notice
limh0
d ( (t + h) , X ( (t) , h))h
= limh0
d ( (t + h) , (t) + hV ( (t)))h
= limh0
(t + h) (t)h V ( (t))
=ddt
(t) V ( (t)) = 0 .
The motivation for generalizing the calculus is to analyze
dynamics (i.e.,ows) on such archetypical examples of metric spaces
as the innite-dimensionalspace L2 (R), manifolds, and the space of
non-empty compact subsets of theplane H R2 .
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
11/185
0.2. EXAMPLE: FLOWS ON L2 (R) xi
0.2 Example: ows on L 2 (R)The space of square integrable
functions L2 (R) (see Appendix A.1 for a precisedenition) is a
linear space and may seem an unlikely candidate to yield
novelresults through our program of abstracting classical results
to metric spaceswhile avoiding the use of any linear structure.
However, for this most elemen-tary of all innite-dimensional
spacesthis Hilbert spacethe linear structure isactually a hindrance
to understanding some of its most basic ows.
Example 2 On M := L2 (R) , the (Hilbert ) space of square
integrable functions of one real variable, the metric is derived
from the L2 norm :
d (f, g ) := R (f g)2 d = f g 2 .What is the simplest example of
a ow on M ? For many visual thinkers, trans-lating the graph leaps
to mind :
F (f, t ) (x) := f (x + t) .
f (x + t) and f (x)
The two ow properties are automatically veried : (i) F (f, 0) =
f and (ii )F (F (f, s ) , t ) = F (f, s + t) for any f L
2 (R). In fact {F (, t ) |tR} is clearly a family of isometries
of M .This example seems so perfectly regular as to seem trivial.
However a con-
founding blow to our intuition is that for most initial
conditions f , the curvesF (f, ) are non-differentiable with
respect to either Gateaux or Frechet differen-tiability (notions we
wont use and wont dene). To get a feel for this situation,consider
the initial condition f := [0,1] . Here S represents the
characteristicfunction of a set S , i.e.,
S (x) := 1 for xS 0 otherwise.
For f := [0,1]
F (f, t + h) F (f, t )h
= 1h [1+ t, 1+ t + h ] [t,t + h ]
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
12/185
xii INTRODUCTION
has norm
2/h and does not converge to a member of L2 (R) as h 0.
Thelinear structure of the vector space L2 (R) is not helping in
our quest to analyze 1
F .Even more fundamentally bothersome is the fact that the speed
of the ow is
not locally bounded, i.e., the speed of the curves F (f, ) can
become arbitrarilylarge on any neighborhood of M .(Here we are
referring to the notion of speed dened technically above. The
speed of F (f, ) is not related to the rate the graph is
translated on the R axiswhich is constantly 1. The metric is biased
toward the structure of additionof functions in order to achieve a
norm and is less sensitive to comparing howsimilar the graphs
appear. Reread the denitions carefully so as not to be misledby
initial intuition.)
This difficulty with translation is at the heart of many
obstacles to answeringthe well-posedness of partial differential
equations (PDEs), since translation isthe solution of
F t =
F x .
This is the simplest non-trivial partial differential equation
and yet we alreadysee the unbounded property of some functional
analysis operators rearing itshead. This warns us about the
difficulties inherent in transporting the languageand intuition of
continuous dynamics in nite dimensions to innite dimensionsor more
general metric spaces. L2 is a beautiful, complete metric space
whichis natural to consider as an environment for solving PDEs, but
the pitfall men-tioned in this paragraph may lead us to widen our
search to other metric spaces.
Example 3 Another basic ow on M := L2 (R) is vector space
translation,G : L2 (R) R L2 (R) given by
G (f, t ) := f + tg
for any choice of gL2 (R). The evolution of the graph of Gt (f )
as t changes
is not quite as easy to visualize as Example 2; but since G
respects the vector space structure, it is much tamer analytically.
Verifying the ow properties is trivial. Continuity in particular
follows immediately from the properties of the norm. In fact the
speed is globally bounded by := g since
d (G (f, t ) , G (f, s )) = (f + tg) (f + sg) = |t s| g .G (, t
), like F (, t ) above, is again a family of isometries of M :
G (f 1, t )
G (f 2 , t ) = (f 1 + tg)
(f 2 + tg) = f 1
f 2 .
1 This difference quotient does, of course, converge to a
difference of Dirac point distrib-utions t +1 t if we bother to
dene the wider notion of a distribution in the linear
dual.Admittedly were being overly critical on the value of
linearity at this stage, but read on andnote for yourself why even
the use of covectors wont simplify the analysis.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
13/185
0.2. EXAMPLE: FLOWS ON L2 (R) xiii
How do our two ows F and G from Examples 2 and 3 compare? How
dothey interact on M , and what does this tell us about M ? Let us
determine thereachable set for this pair of ows. The reachable set
is an object of fundamentalconcern in the subject of control
theory, which we take up in greater detail in3.5. Imagine we are
running some process which allows us to apply either owF or G
successively, at will, to an initial condition in our conguration
spaceM . The reachable set starting from the initial point f is
then dened as
RF,G (f ) := Gs n F t n Gs n 1 F t n 1 ...G s 1 F t 1 (f )M |s i
, t iR, nN .Here we are dropping the composition parentheses, using
Gs F t (f ) = G (F (f, t ) , s)to simplify notation; the general
associativity of composition means the extraparentheses are
unnecessary. So starting with the initial condition f M wecan steer
our process in nite time to any conguration in RF,G (f ) M by
judiciously applying F and G by various amounts s i and t i .
If RF,G (f ) is dense in M , then M is said to be controllable
by F andG. For instance we could imagine M consists of the space of
possible signals acircuit can generate in a looped line. G then
represents adding a waveform inthe shape of the graph of g; and F
would correspond to time lag as the signalnaturally cycles around
the loop. The reachable set in this idealized scenariorepresents
the possible signals that can be generated with our circuit.
As a rst inquiry into the nature of RF,G (f ) for our two types
of translationon L2 (R), let us test whether F and G commute, i.e.,
does F (G (f, s ) , t ) =G (F (f, t ) , s )? If so the reachable
set will be merely a two-dimensional subsetof the
innite-dimensional space M = L2 (R), since any member collapses
tothe simple representation
Gs n F t n Gs n 1 F t n 1 ...G s 1 F t 1 (f ) = Gs 1 + ... + s n
F t 1 + ... + t n (f ) = Gs F t (f ) .
Perhaps surprisingly F and G are usually far from commutative,
and by howmuch depends on the function g:
[F (G (f, s ) , t ) G (F (f, t ) , s)] (x) (3)= [f (x + t) + sg
(x + t)] [f (x + t) + sg (x)] = s [g (x + t) g (x)] .
From the point of view of differentiable ows on a manifold, we
would at leastexpect
d (F (G (f, t ) , t ) , G (F (f, t ) , t )) = O t2
and, in fact, continuing from line (3) we calculate
limt0F (G (f, t ) , t )
G (F (f, t ) , t )
t2 =dgdx
if g is differentiable. Following the ideas of geometric control
theory, this breakin holonomy suggests the reachable set is more
than two-dimensional. In factRF,G (f ) should be dense in the span
of the set of all Lie brackets generated byF and G.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
14/185
xiv INTRODUCTION
This turns out to be exactly correct:
span dndxn
g nN RF,G (f ) (4)
where S denotes the topological closure of a set S M, and spanS
denotesthe closed linear span of S in M . There are algorithms for
steering any initialcondition to a member of the reachable set, and
for many choices of gM , e.g.,g (x) := ex 2 , we nd that all of M
is controllable. Continuing the applicationof this model to signal
processing above, this means that for the correct choiceof g, any
signal can be synthesized by alternately applying F and G. In
thecourse of this book we will clarify the terminology and ideas
surrounding theseclaims, culminating in 5.1 with Theorem 88.
One corollary is that low-frequency trigonometric series of the
formN
n =1an eix/n
are dense in L2 [a, b] for any interval [a, b], Theorem 90.
Heres a quick moti-
vation for this shocking fact: approximate f (x) N
n =1bn xn then notice xn =
in dndt n eitx t =0 . Now approximate the derivatives with nite
differences (theformula is reviewed in Example 129). Example 95
gives the coefficients for ap-proximating x3 to arbitrary accuracy
using just 3 low-frequency sine functions.
To achieve these results we generalize the Chow-Rashevsky
Theorem to met-ric spaces: the closure of the reachable set is the
closure of the integral manifoldto the distribution consisting of
the set of all arc elds bracket-generated fromF and G, which gives
line (4). The proof uses generalized versions of folia-tions
(Chapter 3), Lie brackets (2.2), geometrical distributions (3.4),
and anarithmetic of ows which works on a geometric as well as
algebraic level (2.1,
Theorem 43). To give a rm footing for such complicated
constructions us-ing only the abstract building blocks of metric
spaces, we devote Chapter 1 tocarefully establishing the
fundamental properties of existence, uniqueness andregularity of
ows on M and Chapter 2 to the algebraic properties.
0.3 Example: ows on manifoldsThe ultimate source of inspiration
for metric space generalization of geometri-cal and dynamical ideas
is the theory of differentiable manifolds, in addition tobeing the
colliery for our examples. The elaborate apparatus constructed to
docalculus on a differentiable manifold is remarkably successful in
extending tra-ditional calculus on Rn to a more general setting,
indispensable in fundamental
areas of mathematics and physics. Much of this apparatus is
ready to be furtherextended to metric spaces.Digesting the brief
overview of differentiable manifolds in this section is not
necessary to digest the rest of the material in this book, but a
familiarity withmanifold theory will allow you to anticipate all
our results. This is an apologyto the beginner for how dense the
next paragraph is. [23] or [12] or many other
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
15/185
0.3. EXAMPLE: FLOWS ON MANIFOLDS xv
proper introductions expand the following paragraph to chapters;
[1] gives anintroduction to innite-dimensional manifolds, or Banach
manifolds. We makeno pretense toward rigor in this section, but
promise to rectify this imprecisionin the presentation of the
generalizations throughout the remainder of the text.We focus
instead on the properties of manifolds which are naturally
generalizedto metric spaces.
Example 4 Dene the torus
T 2 := S 1 S 1 = {(x mod2, y mod2) = ( x, y)mod2 |x, yR}where x
mod2 is the remainder upon dividing x by 2. The torus T 2 is most
easily geometrically visualized when embedded in R3 as a doughnut:
First embed the circle S 1 in R3 via a map such as c (t) := (0 , 3
+ sin t, cos t), then rotate the circle around the z-axis with the
embedding S : T 2 R3
S (s, t ) :=cos s sin s 0sin s cos s 0
0 0 1
03 + sin t
cos t.
(This particular construction is easily extended to give more
2-dimensional man-
Figure 1: T 2 embedded in R3
ifolds such as found on pp. 43-47. )T 2 is an archetypical
example of a manifold , which by denition is a set
which is locally at; this means every point xT 2 has a
neighborhood U with
: U V a homeomorphism onto its image in the topological vector
space V .For the torus V = R2 which makes it 2-dimensional, hence
the superscript in T 2 . is called a chart for T 2 which gives
local coordinates on the manifold. T 2is also a differentiable
manifold, which means the charts match up nicely,which means for
any two charts i : U i V for i = 1 , 2 the composition 2 11is a
differentiable map from V to V wherever it is dened. The existence
of
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
16/185
xvi INTRODUCTION
these nicely-matched-up charts means any calculus done on V may
be applied toT 2. Charts are easy to construct for T 2 ; the only
difficulty arises near a point (x, y) T
2 when x = 0 or y = 0 , which the reader is encouraged to
resolve.In Figure 1 you can see the locally at patches of R2 nicely
matching up as grid lines to form the manifold, but this is an
aberration amongst manifolds.Excepting the Klein bottle, no other
compact 2-dimensional manifold has such perfectly aligned patches
globally. Consider, e.g., a globe where longitude and latitude grid
lines degenerate at the pole; results from topology prove any way
you attempt to construct such a grid on a globe, will end with at
least one point of degeneration [40].
Particularly important for our investigation of geometry and
dynamics isthe concept of the tangent space of a manifold, roughly
the space of all possibledirections in which you can move from a
point within the manifold. The tangentspace may be dened in several
equivalent ways; lets outline the most relevantfor our purposes. A
tangent vector v at a point xM is an equivalence classof curves in
the manifold c : ( c , c) M with c (0) = x under the
equivalencerelation that c1 c2 if ( c1) (0) = ( c2) (0) for any
chart , i.e., c1 andc2 are differentiable and tangent to each other
at x. This equivalence relationdistills the idea of a direction
with magnitude v located at the position xinto an abstract
mathematical object, represented by an explicit,
constructibleobject c (0). The tangent space at x is the set of all
equivalence classes underthis relation, denoted T x M . The tangent
bundle TM is the collection of all tangent spaces, i.e., the
disjoint union TM :=
xM T x M , representing all
possible directions of motion (x, v ). A vector eld is a map f :
M TM withf (x)T x M , and represents a rule for motion on the
manifold. A solution toa vector eld is a curve : (, ) M which is
tangent to the vector eld at allpoints, i.e., a curve which follows
the rule. More concretely, if the translationmap s : R R is given
by s (t) := s + t then s : ( s, s) M has s f ( (s)) for all s(, ).
In other words follows the rules of motion of f through M .
Assuming 0(, ) we say (0)M is the initial conditionof the solution,
the place where the motion begins. By the FundamentalTheorem of
ODEs (Appendix B) applied to charts, we always have solutions toa
smooth vector eld, and we can combine them to give a local ow.
Conversely,any differentiable ow on a manifold is generated by a
vector eld.
Example 5 A simple ow that spirals around the torus F : T 2 R T
2 is dened by F t (x, y ) = ( x + t, y + at )mod2 . If a is a
rational number then the path F (x, 0) (R) closes and is
homeomorphic to the circle S 1 (Figure 2 ). These paths are
evocatively described as toral helices. The different paths,
starting
from different points (x, 0), partition T 2. This partition is
an example of a 1-dimensional foliation of the torus. Two more
foliations perpendicular to each
other are illustrated by grid lines in Figure 1 above.When a is
not a rational number the path F (x, 0) (R) does not close on
itself
and is homeomorphic to R, as a dense subset of T 2 (Figure 3 ).
Still there are an innite number of disjoint paths, starting from
different points (x, 0), which
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
17/185
0.3. EXAMPLE: FLOWS ON MANIFOLDS xvii
Figure 2: Rational ow-path
again foliate T 2 .
Figure 3: Irrational ow-path
The solutions to the vector eld f (x, y ) := (1 , a) generate
the ow F . Here the number (1, a) really represents the curve
c (t) := [( x, y ) + t (1, a)]mod2T 2
which itself is a representative of an equivalence class of
curves under tangency and so [c]T (x,y ) T
2 . Sometimes its easier to just construct the ow than to think
about the vector elds; but vector elds are generally considered
pri-mary, and often have great descriptive power, giving a link
between algebra and
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
18/185
xviii INTRODUCTION
geometry. E.g., the vector eld illustrated here
V (x, y ) := (cos y, sin x)is smooth on T 2 since it matches up
at 0 and 2. V is easily solved on the plane and transferred by
charts (or S ) to the manifold. However, the ow paths of V do not
foliate T 2 as before, since there are 4 xed points; instead this
leads to a stratication since the paths are of different
dimensionnamely 1 and 0.
Another inequivalent foliation of T 2 is given by the paths in
Figure 4, consist-ing of two closed circles and an continuums worth
of toral helices which accumu-late on the circles. More circles may
be added, producing topologically distinct foliations. Essentially
the nal twist we can add in foliating a 2-dimensional compact
manifold is a Reeb component, illustrated in Figure 5. See [40] for
an elementary classication of foliations on compact manifolds.
Higher-dimensional foliations of manifolds are vital to the
study of geometryand dynamics. Examples of 2-dimensional foliations
of a 3-dimensional spaceare illustrated on pages 42-47. Just as
integral curves and 1-dimensional fo-liations are generated by
vector elds or by 1-dimensional subbundles of thetangent bundle TM
, surfaces and n-dimensional foliations are generated by
ntransverse vector elds or by n-dimensional subbundles of TM called
distribu-tions 2 . Not all distributions may be integrated to
generate foliations, not even if they are smoothly dened (see
Example 58). However, a simple condition calledinvolutivity
characterizes the integrable distributionsthis characterization
isreferred to as Frobenius Foliation Theorem.
To dene involutivity, we use the Lie bracket [f, g ] of two
vector elds f and g, which is a new vector eld on M . The vector
[f, g ] (x) is the tangency
equivalence class represented by the curve G t F t G t F t (x)
where F andG are the respective ows of f and g. I.e., start at x M
and move in an2 The term distribution is not to be confused with
the several other mathematical con-
cepts that share its name. As a striking case of poor
terminology, when studying dynamicson abstract function spaces
three of these denitions may be needed in a single
example:probability distributions, functionals, and subbundles,
e.g, in Example 85.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
19/185
0.3. EXAMPLE: FLOWS ON MANIFOLDS xix
Figure 4: 4 leaves of another toral foliation are depicted: 2
circles and twopartially-complete squished toral helices. Everyone
loves a Slinky.
Figure 5: Reeb component
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
20/185
xx INTRODUCTION
approximate-parallelogram following F , then G, then F
backwards, then Gbackwards. The little parallelogram almost returns
to x, but t has innitespeed at t = 0 which cancels the naturally
tendency of the parallelogram toclose, at least to order O (t),
giving a curve with nite speed, Figure 6.Why
Figure 6: O (t) gap represents the new vector [f, g ]
do we use t? If we restrict our attention to x Rn and move >
0 ineach of the directions around the parallelogram in with the f
and g vectoreld directions starting at x0 , then using Taylor
series, we get a curve x ( ) =x0 + 2 gx f (x0) f x g (x0) + O 3
.
The bracket encapsulates a subtle difference between f and g
which is crit-ical to appreciate. For example [f, g ] = 0 if and
only if F and G commute,meaning the parallelogram closes perfectly.
But there is much more. The Liebracket gives us fundamental
geometrical information about the subbundle of TM generated by f
and g, i.e., the distribution
( f, g ) := {span {f (x) , g (x)T x M }|xM }.The distribution (
f, g ) gives a plane at each point x and so is also called a
planeeld. Frobenius Foliation Theorem says ( f, g ) foliates M into
2-dimensionalsurfaces ( leaves ) exactly when [f, g ] (x) ( f, g )
for all x M . Higher-dimensional foliations are determined by a
straightforward generalization.
Frobenius Theorem has an important corollary for control theory,
the Chow-Rashevsky Theorem, concerning the reachable set of a
control system: If ( f, g )is involutive then the situation is
simple, and the reachable set R f,g (x) is theleaf of the foliation
through x; both sets consist of the set of all points in the
set
of all piecewise differentiable paths containing x with
derivatives being linearcombinations of f and g. If ( f, g ) is not
involutive then [f, g ] is transverseto any surface tangent to f
and g, so cycling through the motions of f and gaccording to the
bracket denition sends us away from the tangent surface, andthus
the reachable set is not as simple as in the involutive case. But
there is asimple solution in this case as well. If ( f, g ) is not
involutive, then we may form
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
21/185
0.4. EXAMPLE: FLOWS ON A SPACE WITH NO LINEAR STRUCTURE xxi
the distribution [ f, g ] bracket-generated by f and g,
consisting of the linearcombinations of f and g and all nitely
iterated brackets, such as [[f, [f, g ]], f ].By denition [ f, g ]
is involutive and so foliates M by Frobenius Theorem.The
Chow-Rashevsky Theorem says the closure of the reachable set R f,g
(x) isthe leaf of the foliation from the bracket-generated
distribution [ f, g ] throughx. This is easy to believe now since
iterated brackets of f and g are tangent tothe ows of some
complicated composition of F and G. E.g.,
[f, [f, g ]] F 4 |t |G 4 |t |F 4 |t |G 4 |t | F t G 4 t F 4 t G
4 t F 4 t F t (x) .So the ow of any iterated bracket is in R f,g
(x). This shows that the leaf is contained in the closure of the
reachable set; the (less interesting) reverseinclusion follows from
the Nagumo-Brzis invariant-set theorem, proven in 1.3.
Vector elds on a manifold are generalized to metric spaces with
arc eldsas a special family of curves (cf. the technical
description on page 3). Thedenition of Lie brackets (2.2) is
essentially the same on metric spaces as givenabove for manifolds.
But to dene distributions (3.4) using spans of arc elds,and also to
dene involutivity, we need an arithmetic for ows on a metric
spacebut metric spaces have no usable linear structure by denition.
Surprisingly,though you cannot add points together in a metric
space, you can add arc eldsin a natural way which faithfully
generalizes the linear properties of vectorelds on manifolds:
scalar multiplication is dened by changing the speed of the curves,
and arc elds can be added simply by composing them (2.1).
Thenglobal foliations on metric spaces follow with a new proof of
Frobenius Theorem(Chapter 3). The Chow-Rashevsky Theorem is
generalized in 3.5.
0.4 Example: ows on a space with no linearstructure
As a nal introductory example we consider a metric space which
resists anynatural ascription of a linear structure, but still
gives a fertile environment fordynamics.
Example 6 Let (Rn , d) be the usual n-dimensional Euclidean
space. The met-ric space H (Rn ) is the set of all nonempty compact
subsets of Rn and the Hausdorff distance is given by
dH (a, b) := max supx
ainf y
b {d (x, y)} , supy
ainf x
b {d (x, y)} .Using the simplifying notation d (x, a ) :=
inf
ya {d (x, y )}=: d (a, x ) for x Rn
and aRn , we have
dH (a, b) = supxa ;yb
{d (x, b) , d (y, a )}.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
22/185
xxii INTRODUCTION
H (Rn ) has several useful topological properties in common with
Rn . It is separable, complete and even locally compact
(separability is obvious by consid-ering nite subsets of Rn ; for
completeness, see [8]; for local compactness, see [33, p. 183]
).
What makes this space interesting for modeling is that shapes of
homoge-neous matter are merely points in this metric space. A
circle, a rectangle, apentagram: all points in H R2 . A ball, a
box, a cloud: points in H R3 .
Exercise 7 Find dH (a, b) when aH R2 is the unit coordinate
box
a := {(x, y)|0 x 1, 0 y 1}and bH R
2 is the unit ball
b := (x, y )
|x2 + y2
1 .
Hint : Since a = b we cannot have dH (a, b) = 0 .
Figure 7: dH (ball, square ) =?
Exercise 8 Determine which points are in the ball BdH (0, 1)H R2
.
Hint : BdH (0, 1) = Bd (0, 1) and the word point is easily
misinterpreted here.
As further motivation for the potential of this space, answer
the question:
What is a curve in H (Rn ) ?
Looking at a black and white newspaper photo with a magnifying
glass we see anite collection of black dots. This photograph may be
thought of as a point inH R2 , the compact set representing the
union of the black dots which forms
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
23/185
0.5. CHAPTER OUTLINE xxiii
a closed and bounded subset of R2. Now if a black and white
photograph is apoint in H R2 , a black and white lm clip is a curve
in H R2 . These points of H R2 , the photographs or individual
frames of the movie, move continuouslywith respect to the Hausdorff
metric as time goes by (or at least approximatelycontinuously,
since there are only a nite number of frames in a lm clip ).
Colorcinema is a curve in H R3 .
The ability to describe the motion of complex patterns makes H
(Rn ) a veryinteresting space. It is easy to imagine the motion and
evolution of a homoge-neous material simply as a curve in this
metric space: a moving cloud may becharacterized as a curve in H R3
, and a lightning stroke is a very fast curvein H R3 ; the growth
of a bacteria colony in a petri dish and the evolution of
asix-sided snowake growing from a tiny ice seed are both
geometrically curvesin H R3 .
Very well then, H (Rn
) has a strong potential for describing all sorts of shape
changes, but do we have any control on this profusion of
informationwith which H (Rn ) presents us? How do we mathematically
encapsulate motionor characterize forces on such a space? Can we
generalize differential equations,somehow? Even then, could we
stomach any calculations with this complicatedmetric? Happily, all
of these questions have positive answers.
Lets construct some curves in H (Rn ).
Example 9 For x, yRn , let xy : [1, 1] Rn be the line dened
by
xy (t) := (1 t) x + ty.For k functions f i : Rn Rn dene the arc
eld X : H (Rn )[1, 1] H (Rn )by
X a (t) := xai=1 ,...,kxf i (x ) (t)
which describes curves from X a (0) = a to X a (1) = i=1 ,...,k
f i (a) in H (Rn ). In
Chapter 7 this arc eld X is shown to generate a ow F on H (Rn ).
When the f i are affine and contractive F t (a) converges to a
unique xed point in H (Rn )as t , the convex hull of a fractal.
Another example in 7.5 characterizes the reachable set of a control
system as the limit of the ow of a similar arc eld.
0.5 Chapter outline
Part I: Theory In these chapters our will is bent to proving
generalizationsof the basic theorems of dynamical systems and
differential geometry.
Chapter 1: Flows The Fundamental Theorem of ODEs is generalized,
prov-ing the well-posedness of arc elds, Theorem 12. This gives a
meansfor generating ows on metric spaces. Global ows are
guaranteed
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
24/185
xxiv INTRODUCTION
when an arc eld satises the extra condition of linearly
boundedspeed, Theorem 25. A xed point is guaranteed when the arc
eld issuitably contractive, Theorem 31. An invariant-set theorem
general-izing the Nagumo-Brzis Theorem is given with Theorem 33,
whichis used later to piece together integral surfaces in a global
foliationtheorem. Theorem 35 gives a condition analogous to a
vanishing Liebracket which guarantees forward ows commute.
Chapter 2: Lie algebra on a metric space An arithmetic for arc
elds is in-troduced which generalizes the algebraic structure of
vector elds ona manifold. Theorem 43 elucidates which module
properties generalarc elds enjoy. Then the Lie bracket is
introduced and its algebraicproperties are explored. Theorem 52
shows how pull-back and push-forward operations are natural with
respect to this new Lie algebra.
Chapter 3: Foliations Transverse arc elds generate geometric
distributions.The Lie bracket is used to prove a local Frobenius
theorem, showinginvolutive distributions have integral surfaces,
Theorem 62. Theseintegral surfaces are pieced together to foliate
metric spaces, culmi-nating in a global Frobenius theorem, Theorem
75. A corollary of this result is an application to control theory
with Chows Theoremon a metric space, Theorem 78.
Part II: Examples
Chapter 4: Brackets on function spaces The Lie bracket and the
FrobeniusTheorem are applied to simple ows on L2 (R) to make good
on thepromises of 0.2. Various foliations of L2 and other function
spacesare explored.
Chapter 5: Approximation with non-orthogonal families
Applications of theresults of Chapter 4 give surprising new
approximation methods us-ing non-orthogonal families of functions
such as translations of aGaussian e(x+1 /n )2 |nN in 5.1 and
low-frequency trigonomet-ric functions eix/n |nN in 5.2.
Chapter 6: More ows on function spaces PDEs are rewritten as arc
eldsavoiding derivatives.
Chapter 7: Flows on H (Rn ) A continuous version of the discrete
IFS fractalgenerator and other ows with novel dynamics are
introduced.
Some sections are not logically dependent on others. The fastest
tour of thehighpoints is
1.1 2.1 2.2 3.2 4 5
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
25/185
0.6. PREREQUISITES xxv
0.6 Prerequisites
Technically the prerequisites for understanding this book are
very basic; a singlesemester of undergraduate analysis which
introduces the concept of a limit ina metric space is sufficient.
Weve made efforts to keep the book self-containedand gently
introduce each concept. Certainly, those with experience in
thedifferentiable-manifold presentations of ows, Lie brackets and
foliations willnd this generalized environment easy to apprehend.
When released from thedetails of charts, atlases and coordinates,
new students may likewise nd theseconcepts simpler to grasp.
Several proofs are extremely long. This is a good place to
apologize, justifyourselves, and prepare the reader. This is an
abstract subject with concreteclaims. We are a bit defensive,
therefore, and feel the need to detail everypedestrian step
exhaustively. Instead of relying on our readers
mathematicaldexterity in this unfamiliar terrain, we spoiled the
fun and printed out six-pageproofs. Instead of slogging through,
line by line, it may be more productive foryou to read the proofs
outline, then create one yourself.
0.7 Abridged version of the bookGeneralizations of the major
ideas in dynamics and geometry can be fruitfullymade to metric
spaces. As well as greater descriptive power, the extra
generalitygives insight into classical questions on
innite-dimensional spaces.
A vector eld on a manifold is recast as an arc eld X , that is,
a set of curves on a metric space M , each curve representing a
direction, i.e., X is acontinuous map X : M [1, 1] M such that for
all xM , X (x, 0) = x.Tangency between two arc elds X and Y is
given by the condition
d (X x (t) , Y x (t)) = o (t) .
If X satises the regularity conditions E1 and E2 (p. 1.1.1) on a
completemetric space, then there exists a unique local ow tangent
to X . If X haslinearly bounded speed, it generates a global
ow.
An arithmetic for arc elds is given by X + Y and aX for aR dened
by
(X + Y )t (x) := Y t X t (x)
and(aX )t (x) := X at (x) .
The Lie bracket [X, Y ] of two arc elds is given by
[X, Y ] (x, t ) := G t F t G t F t (x)
where F and G are the ows generated by X and Y .A distribution
is a set of arc elds. A distribution is involutive if for
any X, Y , we have [X, Y ] . An involutive distribution has a
unique
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
26/185
xxvi INTRODUCTION
maximal integral surface through each point in M . The integral
surfaces, piecedtogether, foliate M .
One application on M := L2 (R) shows the ows F t (f ) (x) := f
(x + t)and Gt (f ) := f + tg bracket-generate an innite-dimensional
distribution wheng (x) = ex 2 , and the reachable set is all of M .
Similarly G and Z t (f ) (x) :=eixt f (x) have an
innite-dimensional bracket-generated distribution and L2 ([a, b] ,
C)is controllable with G and Z , for any choice of interval [a, b].
Consequently se-
ries of GaussiansN
k=0ak e(x +1 /k )
2or low-frequency trig series
N
k= M ak eix/k may
be made arbitrarily close to any square integrable function.
0.8 Acknowledgements
This theory took more than 10 years to commit to paper, though I
had assumedit could be hammered out in a few months. Its all Axel
Boldts fault. Tomy constant irritation, he corrected countless
mistakes and misunderstandings,which really slowed down the
creative process. He also introduced me to severalbranches of
mathematics, which distracted me from metric spaces, and mademe a
more versatile mathematician. Thanks for screwing up my focus,
pal.Michael Green was the mathematician who gave me the most
extensive anduseful feedback on this manuscript. David Bleecker
suggested I write this book,which was the strangest thing I had
seen him do, so I took him seriously. Hehas been my greatest
supporter in the development of these ideas.
Except for my wife, Karen. Often when authors thank their wives,
I imaginea shrew who speeds the writing of a book by folding her
arms and tapping herfeet at the doorway to the study. But Karen
took an interest in all the ideasin this book, even the
applications outside her eld of expertise. She was mybest sounding
board, my best critic. And by introducing me to fatherhood
thenguiding me for a year abroad in China, shes been my best
teacher.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
27/185
Part I
Theory
1
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
28/185
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
29/185
Chapter 1
Flows
Panta rhei . (Everything ows.)-Heraclitus, ca. 500 B.C.
The purpose of this chapter is to introduce a general method for
producingows (dynamical systems) on a metric space. A ow may
proceed forward andbackward in time F : M (, + ) M , or possibly
only forward in timeF : M [0, + ) M as in the case of diffusion. We
explore the generation of both types of ows and study some
conditions which guarantee global existence,xed points and
commutativity.
1.1 Generating ows with arc elds
This section follows the generation of ows on a manifold M from
a vector eld:rst we nd solutions for each initial condition xM ,
then we piece togetherthe solutions with domain (, ) in a
neighborhood of x to get a local ow,which are then continued to
produce a global ow with domain (, ).
1.1.1 The fundamental theoremThe following denition is made in
analogy with the representation of a vectoreld on a manifold as a
family of curves, detailed in 0.3.
Denition 10 An arc eld on a metric space M is a continuous map X
:M [1, 1] M with locally uniformly bounded speed, such that for all
xM ,X (x, 0) = x.
Saying X has locally uniformly bounded speed means X (x, ) : [1,
1] M is Lipschitz, locally uniformly in x. Specically we have (x)
:= sup
s = t
d (X (x, s ) , X (x, t ))
|s t|< ,
3
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
30/185
4 CHAPTER 1. FLOWS
(i.e., X (x, ) is Lipschitz ), and the function (x) is locally
bounded, meaningthere exists r > 0 such that (x, r ) := sup {
(y) |yB (x, r )}< .
A solution curve to X is a curve which is tangent to X
throughout itsdomain, i.e., : (, ) M for some open interval (, )R
such that foreach t(, )
limh0
d ( (t + h) , X ( (t) , h))h
= 0 , (1.1)
i.e., d ( (t + h) , X ( (t) , h)) = o (h).Arc elds are typically
denoted with X , Y , or Z . The two independent
variables for arc elds, usually denoted by x and t, are often
thought of asrepresenting space and time. We typically use x,y, and
z for space variables,while r,s,t, and h ll the time variable slot.
As with ows, the variables of anarc eld X will often migrate
liberally between parentheses and subscripts
X (x, t ) = X x (t) = X t (x)
depending on which variable we wish to emphasize in a
calculation.On Rn a vector eld which is Lipschitz continuous
generates a local ow
constructed by Euler curves. An arc eld is a faithful analogy
for a metricspace, and when it satises analogous regularity
conditions (E1 and E2 detailedbelow), we will soon show Euler
curves converge to a ow. To further theanalogy with vector elds on
manifolds, an arc eld may be thought of as amap X : M AM where AM
is the arc bundle , consisting of the set of allLipschitz
continuous arcs, and we require X (x) (0) = x.
The initial condition of is the point x = (0)
M . Notationally we usex to mean the solution with initial
condition x. We say x : (x , x ) M is the unique solution to X with
initial condition x if for any other solution
x : ( x , x ) M also having initial condition x, we have ( x , x
)( x , x )and x = x |( x , x ) (i.e., x is the unique maximal
solution curve ).We will prove below that on a locally complete
metric space the next twoconditions guarantee the arc eld problem
is well posed , i.e., there exists aunique solution from any
initial condition xM (Theorem 12).
Condition E1: For each x0M , there exist positive constants r,
and suchthat for all x, yB (x0, r ) and t(, )d (X
t(x) , X
t(y))
d (x, y) (1 +
|t
|)
Condition E2: For each x0M , there exist positive constants r,
and suchthat for all xB (x0 , r ) and s(, ) and any t with |t| |s|d
(X s + t (x) , X t (X s (x))) |st | .
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
31/185
1.1. GENERATING FLOWS WITH ARC FIELDS 5
These conditions may be restated as saying
d (X t (x) , X t (y))d (x, y ) 1 O (|st |)
andd (X s + t (x) , X t (X s (x))) = O (|st |)
for |t| |s| as s 0, locally uniformly in x. Innitesimally these
conditionshave E1 limiting the spread of X , and E2 restraining X
to be ow-like (Figure1.1).
Figure 1.1: E1 and E2 are continuity conditions on X which
ensure some geo-metric regularity using only the metric.
Example 11 A Banach space (M, ) is a complete normed vector
space (e.g., Rn with Euclidean norm ). A Banach space is an example
of a metric space (M, d ) where the metric is dened by d (u, v) :=
u v . A vector eld on a Banach space M is a map f : M M . A
solution to a vector eld f with initial condition x is a curve x :
(, ) M dened on an open interval (, ) R containing 0 such that x
(0) = x and x (t) = f (x (t)) for all t (, ). The Fundamental
Theorem of ODEs (detailed in Appendix B ) guarantees unique
solutions for any locally Lipschitz vector eld f . With a few
tricks, most differential equations can be represented as vector
elds on a suitably abstract space.
Every Lipschitz vector eld f : M M naturally gives rise to an
arc eld X (x, t ) := x + tf (x) on M , and it is easy to check X
satises E1 and E2 :Calculating
d (X t (x) , X t (y)) = X t (x) X t (y) x y + |t| f (x) f (y) (1
+ |t|K f ) x y
where K f is the local Lipschitz constant for f , so X := K f
gives Condition
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
32/185
6 CHAPTER 1. FLOWS
E1.
d (X s + t (x) , X t (X s (x)))= x + ( s + t) f (x) [X s (x) +
tf ((X s (x)))] = tf (x) tf (X s (x)) |t|K f x [x + sf (x)] |st |K
2f x
so X := K 2f x . Further the solutions to the arc eld are
precisely the solutions to the vector eld guaranteed by the
fundamental theorem since
d (t + h) , X (t ) (h) = |h| (t + h) (t)
h f ( (t)) = o (h) (t) = f ( (t)) .
Therefore Theorem 12, below, is a generalization of the
classical Fundamental Theorem of ODEs (given in Appendix B ).
Similarly, Lipschitz vector elds on a Banach manifold (a manifold
whose charts map to a Banach space; if f is locally Lipschitz in
one chart, it is in any and on the manifold with any compatible
metric ) give arc elds which satisfy E1 and E2.
The basic iterative trick for proving ODEs are well-posed on Rn
, or moregenerally on a Banach space, applies just as well for arc
elds on general metricspaces. For economy of description we use
round brackets in the superscript,f ( i ) , to denote the
composition of a map f : M M with itself i times. So,
forexample,
X ( i )t/ 2n (x) = X t/ 2n X t/ 2n ... X t/ 2n
i compositions
(x) .
Then given x M and a positive integer n, we may dene the n-th
Eulercurve n : (2n , 2n ) M for X starting at x as n (t) := X
(2 n )t/ 2n (x) (1.2)
for nN such that 2n > |t|. Taking n generates a solution to X
in thefollowing fundamental result.
Theorem 12 Let X be an arc eld satisfying E1 and E2 on a locally
complete metric space M . Then given any point x M , there exists a
unique solution x : (x , x ) M with initial condition x (0) = x for
some x < 0 < x R{, }.
Proof of Existence of Solutions. We will showlim
n n (t) = limn
X (2n )
t/ 2n (x)
exists for each t sufficiently close to 0 and dene x (t) as this
limit. Then x (t)will be shown to be tangent to X at t = 0 . The
elaborate chain of elementary
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
33/185
1.1. GENERATING FLOWS WITH ARC FIELDS 7
calculations checking these two facts becomes convoluted, but
the inspirationguiding us is sketched simply enough in Figures 2.2
and 2.3. We then establishx (s + t) = x (s ) (t) which shows x is
tangent to X at all t in its domainby the previous result.
Uniqueness of solutions is elaborated and veried inRemark 17,
below.
First we show that for sufficiently small c > 0 the image of
the Euler curves n ([c, c]) must remain bounded for all n. This is
intuitively true because thearc eld X from which the Euler curve is
constructed has locally bounded speed < , so successively
following 2n compositions of X for small time t/ 2n doesnot allow
us to travel further than |t| distance. This is exactly correct,
but weneed to demonstrate how we can achieve this bound using only
the metric. Weexhaust the rest of this voluminous paragraph with
the tedious details. Supposer > 0 is chosen so (x, r ) < . If
(x, r ) = 0 , then (t) := x denes a solutioncurve and there is
nothing to prove. Thus, assume (x, r ) > 0, and let
c := r/ (x, r ) .
We assume hereafter that t is restricted to |t| < c and |t|
< 1, guaranteeing theEuler curve n (t) is well dened. In this
case we claim n (t) B (x, r ): thetriangle inequality gives
d (x, n (t)) 2n
k=1d X (k1)t/ 2n (x) , X
(k )t/ 2n (x)
where X (0)t/ 2n (x) = x by denition.
d X (k1)t/ 2n (x) , X (k)t/ 2n (x) = d y, X t/ 2n (y) (y) |t|/
2n for each k
where y := X (k1)t/ 2n (x). So if yB (x, r ) then (y) (x, r )
and inductionallows us to conclude
d ( n (t) , x) (x, r ) |t| < r .
Next we additionally assume the above r > 0 is chosen small
enough that
and from Conditions E1 and E2 hold uniformly on B (x, r ) and
for conve-nience, that , > 1. We may further assume the closure
B (x, r ) is a completemetric subspace of M by again taking r to be
smaller if need be. In this carefullychosen neighborhood we will
now show the Euler curves converge by proving nis Cauchy. (If M
were locally compact, Arzela-Ascoli would allow us to bypassthis
one page verication.)
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
34/185
8 CHAPTER 1. FLOWS
Figure 2.2: To prove the Euler curves areCauchy, apply E1 and E2
repeatedly toestimate the distance between n (t) and n +1 (t)
tracking back to n (0) = x0 = n +1 (0) .
Figure 2.3: To prove tangency applyE1 and E2 to estimate the
distancebetween X t (x0) and n (t) x (t) .
Consider
d n (t) , n +1 (t) = d X (2 n )t/ 2n (x) , X
(2n +1 )t/ 2n +1 (x)
d X (2 n )t/ 2n (x) , X
(2)t/ 2n +1 X
(2 n 1)t/ 2n (x) + d X (2)t/ 2n +1 X
(2 n 1)t/ 2n (x) , X (2n +1 )t/ 2n +1 (x)
The rst term is approximated by
d X (2n )
t/ 2n (x) , X (2)t/ 2n +1 X
(2 n 1)t/ 2n (x) = d X 2t/ 2n +1 X (2 n 1)t/ 2n (x) , X
(2)t/ 2n +1 X
(2 n 1)t/ 2n (x)
= d X 2t/ 2n +1 (y) , X (2)t/ 2n +1 (y)
t2n +1
2
for y := X (2n 1)t/ 2n (x) using Condition E2, while the second
term is approximated
by
d X (2)t/ 2n +1 X (2 n 1)t/ 2n (x) , X
(2n +1 )t/ 2n +1 (x)
= d X (2)t/ 2n +1 X (2 n 1)t/ 2n (x) , X
(2)t/ 2n +1 X
(2n +1 2)t/ 2n +1 (x)
d X (2n
1)t/ 2n (x) , X (2n +1
2)t/ 2n +1 (x) 1 + |t|2n +1
2
using Condition E1 twice. Such calculations will now be
performed frequentlyand without comment for the rest of the proof;
usually when a new orerupts, the triangle inequality and Condition
E1 or E2 have been used.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
35/185
1.1. GENERATING FLOWS WITH ARC FIELDS 9
Inserting these last two estimates and iterating we have
d X (2n
)t/ 2n (x) , X (2n +1
)t/ 2n +1 (x)
d X (2 n 1)t/ 2n (x) , X
(2n +1 2)t/ 2n +1 (x) 1 + |t|2n +1
2
+t
2n +12
d X (2 n 2)t/ 2n (x) , X
(2n +1 22)t/ 2n +1 (x) 1 + |t|2n +1
22
+ 1 + |t|2n +1
2 t
2n +12
+t
2n +12
d X (2 n 2n )t/ 2n (x) , X
(2n +1 22n )t/ 2n +1 (x) 1 + |t|2n +1
22n
+2n 1k=0 1 + |
t
|2n +1 2k t
2n +12
= 0 +t
2n +12 2n 1
k=01 + |t|
2n +1
2k
(geometric series )=
t2n +1
2 1 + |t |2n +1 2n +1
11 + |t |2n +1
2
1
=t
2n +12 1 + |t |2n +1
2n +1
1|t |2n + |
t |2n +1 2
t2n +1
2 e|t | 1|t |2n
|t|2n +1
e|t | 1
Then for m < n
d ( m (t) , n (t)) n 1k= m
d k (t) , k+1 (t) =n 1k= m
d X (2k )
t/ 2k (x) , X (2k +1 )t/ 2k +1 (x)
n 1k= m
|t|2k+1
e|t | 1 |t|
e|t | 1
2(m +1) k=0
2k = |t|e|t | 1
2m
and we see n (t) is uniformly Cauchy on the interval |t| < c
in the completemetric space B (x, r ). By the bound on speed, the
curves n (t) are uniformlycontinuous in t and so they converge to a
(continuous) curve, denoted
x (t) := limn n (t) .
Let us now check x is tangent to X , rst at t = 0 . Notice
d (x (t) , X x (t)) d (x (t) , n (t)) + d ( n (t) , X x (t))
.The rst summand is easily controlled. For the second summand
consider thefact that for any t[1, 1] and nN we have
d X t (x) , X (n )t/n (x) e|t | t2 (1.3)
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
36/185
10 CHAPTER 1. FLOWS
which holds since
d X t (x) , X (n )t/n (x) n 1k=0 d X (n k)t/n X kt/n (x) , X (n
(k+1))t/n X (k+1) t/n (x)
n 1k=0
1 + |t|n
(n (k+1))
ktn
2
e|t |t2 .
Replacing the n in (1.3) with 2n , the bound is undisturbed, and
we have
d (x (t) , X x (t)) d (x (t) , n (t)) + e|t |t2.Letting n
gives
d (x (t) , X x (t)) e|t |t2 = O t2 (1.4)locally uniformly in
x.
Next we show x is locally 2nd-order tangent to X for all t. This
will bedone if we show x (s + t) = x (s ) (t) because in that
case
d x (s + t) , X x (s ) (t) = d x (s ) (t) , X x (s ) (t) = O
t2
this last equality having been established by line (1.4). Using
(1.3) we have
d X t (x) , X (n )t/n (y) d (x, y) + t2 e|t | (1.5)since
d X t (x) , X (n )t/n (y) d X t (x) , X
(n )t/n (x) + d X
(n )t/n (x) , X
(n )t/n (y)
t2 e|t | + 1 + |t|n
n
d (x, y ) d (x, y ) + t2 e|t |.
Next if k divides j then using (1.5) we have
d X ( j )t/j (x) , X ( j/k )kt/j (x) e|t |t2 k/j (1.6)
since
d X ( j )t/j (x) , X ( j/k )kt/j (x) = d X
(k )t/j X
(k[j/k 1])t/j (x) , X kt/j X ( j/k 1)kt/j (x)
d X (k [j/k 1])t/j (x) , X ( j/k 1)kt/j (x) + kt j2
e|kt/j | ...
... d X (0)t/j (x) , X
(0)kt/j (x) +
ktj
2e|kt/j |+ e|kt/j | + ktj
2e|kt/j |
+ ... ktj2 e|
k
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
37/185
1.1. GENERATING FLOWS WITH ARC FIELDS 11
where the sum is taken j/k times and since d X (0)t/j (x) , X
(0)kt/j (x) = 0 the
above is
...kt j
2
e|kt/j |+ e|kt/j | + kt j
2
e|kt/j | + ... kt j
2
e|kt/j |
=kt j
2
= t2 e|t | k j
.
(1.6) is useful because it gives us
limj
X ( j )t/j (x) = limj X (j/k )kt/j (x)
or better putlim
j X (kj )t/j (x) = limj
X ( j )kt/j (x) (1.7)
where k can be any function of j and t as long as k/j 0 as j
.For each n N, choose i (n) N such that n/i (n) 0 as n (forexample,
choose i (n) = n2 ). and let j (i, n ) , k (i, n )N be chosen so
j
s + t2i
s2n
< |s + t|2i
and ks + t
2i t
2n< |s + t|
2i
so
js + t
2i+ k
s + t
2i s
2n+
t
2n< 2 |s + t|
2iwhich implies ( j + k) 2in < 2
so j + k = 2 in + (n)
where | (n)| < 2. Thereforex (s + t) = limn
X (2n )
(s + t ) / 2n (x) = limiX (
2i )s + t2 i
(x) = limi
X (2n [j + k])
s + t2 i
(x)
= limi
X (2n j )
s + t2 i
X (2n k)
s + t2 i
(x) and using (1.7) this is
= limi
X (2n )
j s + t2 i
X (2n )
k s + t2 i
(x) = limn
X (2n )
t/ 2n X (2 n )s/ 2n (x)
= limn
X (2n )
t/ 2n limn X (2
n )s/ 2n (x) = x (s ) (t) .
This completes the proof that solutions exist which are locally
uniformly 2nd-order tangent to X . The proof of uniqueness follows
from Theorem 16 below;see Remark 17.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
38/185
12 CHAPTER 1. FLOWS
Remark 13 Theorem 12 has a simple corollary showing the
well-posedness of time-dependent dynamics following the exact same
idea for time-dependent vec-tor elds on a manifold. Simply consider
a time-independent arc eld on M R,namely ((x, t ) , h) (X x,t (h) ,
t + h) in M R, and project solutions onto the M factor.
2nd-order differential equations can be rewritten with 2nd-order
vector elds.A 2nd-order arc eld is a straightforward generalization
with well-posedness a simple corollary of Theorem 12 (see [16] for
details ).
With a little extra effort Theorem 12 and those which follow are
true in evengreater generality, and the reader is encouraged to
study the work in, e.g., [52],[7] and [18]. **check on the status
of columbo and corlis new work**. Butin the examples throughout
this book the stronger conditions E1 and E2 aresatised and are
Easier to use.
The above proof actually gives a result stronger than the
statement of thetheorem which will be frequently useful:
Corollary 14 Assuming E1 and E2, the solutions are locally
uniformly 2nd-order tangent to X in the variable x, i.e.,
d (X x (t) , x (t)) = O t2
locally uniformly for xM ; i.e., for each x0M there exist
positive constants r,,T > 0 such that for all xB (x0 , r )
d (X x (t) , x (t)) t2T whenever |t| < .
Proof. This was established at line (1.4).Denote local uniform
tangency of two arc elds X and Y by X Y andlocal uniform 2nd-order
tangency by X Y . It is easy to check and areequivalence relations.
E.g., transitivity follows from the triangle inequality:
d (X t (x) , Z t (x)) d (X t (x) , Y t (x)) + d (Y t (x) , Z t
(x)) .We use the symbols and in many contexts in this monograph
(particularly3.4), and always with an associated
local-uniform-tangency property.
Further, the proof of Theorem 12 gives us another useful fact we
will subse-quently need :
Corollary 15 Assuming E1 and E2, the solutions are tangent
uniformly over all arc elds X which satisfy E1 and E2 for specied
and .
Proof. This was also established at line (1.4).Also notice the
proof used only the weaker property s = t and not the more
general |t| |s| from Condition E2 to prove the Euler curves are
Cauchy. Thefull assumption was used to prove the solution is
tangent to the arc eld.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
39/185
1.1. GENERATING FLOWS WITH ARC FIELDS 13
Theorem 16 Let x : ( x , x ) M and y : y , y M be two solu-tions
to an arc eld X which satises E1. Assume ( x , x )
y , y
I for some interval I containing 0, and assume E 1 holds
uniformly with on a set containing
{x (t) |tI }{y (t) |tI }.Then
d (x (t) , y (t)) e|t |d (x, y) for all tI .Proof. We check t 0,
the case t < 0 being similar. Let
g (t) = et d (x (t) , y (t)) .
For h 0, we haveg (t + h)
g (t)
= e( t + h ) d (x (t + h) , y (t + h)) et d (x (t) , y (t))= e(
t + h ) (d (X h (x (t)) , X h (y (t))) + o (h)) et d (x (t) , y
(t)) et eh d (x (t) , y (t)) (1 + h) et d (x (t) , y (t)) + o (h)=
eh (1 + h) 1 et d (x (t) , y (t)) + o (h)= o (h) et d (x (t) , y
(t)) + o (h) = o (h) (g (t) + 1) .
Hence, the upper forward derivative of g (t) is nonpositive;
i.e.,
D + g (t) := limh0+
g (t + h) g (t)h 0.
Consequently, g (t)
g (0) or
d (x (t) , y (t)) et d (x (0) , y (0)) = et d (x, y ) .
Theorem 16 says solutions locally diverge at most exponentially,
which is themost useful result we have for proving regularity of
ows. When I is compact
{x (t) |tI }{y (t) |tI }is compact since x is continuous, and so
it is often easy to nd a uniform bound for E1 on the set.
Remark 17 Uniqueness of solutions in Theorem 12 has the same
meaning as
in classical ODE theory :(1.) Any two solutions 1x : 1x , 1x M
and 2x : 2x , 2x M with
initial condition x has 1x (t) = 2x (t) for all t1x ,
1x 1x , 1x and (2.) There exists a solution x : (x , x ) M with
maximal domain,meaning any other solution x : (x , x ) M has in the
sense that for any (x , x )(x , x ).
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
40/185
14 CHAPTER 1. FLOWS
Choosing x = y in Theorem 16 establishes (1.) for a small
interval containing the origin. The exact same extension argument
as in ODEs then establishes (1.) and (2.) fully (cf. practically
any text introducing ODEs, e.g., [39] ). The maximal interval (x ,
x ) described in (2.) is the union of the domains of all solutions
with initial condition x.
Example 18 **Good spot for the non-unique solutions example x =
x. This example indicates how E1 and E2 cannot be weakened too much
if we want toguarantee a general well-posedness result.**
Remark 19 Theorem 16 gives uniqueness of solutions for any arc
eld which satises E1 alone. E2 is only used to prove general
existence, but E2 is typi-cally the more difficult condition to
verify, so if we can verify solutions exist in
some other manner (perhaps directly calculating the limit of
Euler curves, as in Example 100 ) E1 is sufficient.
Theorem 16 also gives an easy proof of a very general
Nagumo-type invariant-set theorem, Theorem 33 below in 3.4.
Notice in the proof of Theorem 12 the Euler curves were dened
with nodesspaced at a distance of t/ 2n . This was for convenience.
The simpler expression
limn
X (n )t/n (x) = x (t) (1.8)
may also be veried, but we wont present the more tedious
analysis.
Yet a third denition of Euler curves for any real number r >
0 is common:for i, n N dene
r,n (t) :=X ( tir 2 n ) X
( i )r 2 n (x) i r 2n t (i + 1) r 2n
X ( t + ir 2 n ) X ( i )
r 2 n (x) (i + 1) r 2n t i r 2n .
This concatenation of arcs is more complicated notationally, but
more intuitivelycompelling, and is in introductory texts on
differential equations. Again r,n x as n as was proven in [18] with
r = 1 to verify well-posedness undercommensurate conditions.
Notice
t,n (t) = X (2 n )t/ 2n (x)
since t = 2 n t2n .1.1.2 Local owsFrom now on (x , x ) will
denote the maximal domain with initial condition x.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
41/185
1.1. GENERATING FLOWS WITH ARC FIELDS 15
Corollary 20 Assume the conditions of Theorem 12 and let s (x ,
x ).Then x (s ) = x
s and x (s ) = x
s. Thus t
x (s ) , x (s ) if and only if t + s(
x , x ), and then we have x (s ) (t) = x (s + t).
Dening W M R by W : = {(x, t )M R|t(x , x )} and F : W M by F
(x, t ) := x (t) (1.9)
Then
(i) M {0}W and F (x, 0) = x for all xM (identity at 0 property
)(ii ) F (t, F (s, x )) = F (t + s, x ) (1-parameter local group
property )(iii ) For each ( xed ) xM , F (x, ) : ( x , x ) M is the
maximal solution x to X .
The map F is called the local ow of X .Compare Condition E2 with
(ii ) above to see why an arc eld might be
described as a pre-ow.Theorem 16 says if F is the local ow of an
arc eld X which satises
Condition E1 with uniform constant X then
d (F t (x) , F t (y)) eX |t |d (x, y ) . (1.10)Thus F (x, t ) is
continuous in x. Notice eX |t | = 1+ X |t|+ O t2 and
compareCondition E1 with line (1.10) to see why E1 may be thought
of as a local linearityproperty for X , needed for the continuity
of F . Now lets check continuity inthe other variable, t:
Lemma 21 Suppose c > 0 and : (c, c) X is a solution curve of
X .Assume the speed of X is bounded by [0, ) on ((c, c)) . Then the
speed of is also bounded by .Proof. First let t 0. For c t0 t0 + t
< c, let
f (t) := d ( (t0 + t) , (t0)) tSince f (0) = 0 we wish to show D
+ f (t) 0, since then f (t) 0 and we willthen know
d ( (t0 + t) , (t0)) tas desired.
f (t + h) f (t) = d ( (t0 + t + h) , (t0)) d ( (t0 + t) , (t0))
h
d ( (t0 + t + h) , (t0 + t)) h d ( (t0 + t + h) , X h ( (t0 +
t))) + d (X h ( (t0 + t)) , (t0 + t)) h= o (h) + d (X h ( (t0 + t))
, X 0 ( (t0 + t))) h o (h) + h h = o (h) .
Checking d ( (t0 + t) , (t0 )) |t| for t < 0 is similar,
mutatis mutandis .
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
42/185
16 CHAPTER 1. FLOWS
Theorem 22 For F and W as above (1.9 ) we have W open in M R and
F continuous on W .Proof. Continuity is easy to check using Theorem
16 and Lemma 21 on
the separate variables, once weve established a proper
environment on whichtheir assumptions are satised. So we rst check
W is open by showing forany (x0 , t0) W there is a neighborhood V
of x0 and > 0 such that V (t0 , t0 + )W . Dene x1 := x0 (t0).
Since X has locally bounded speedthere exists r > 0 such that :=
(x1 , r ) < , and so for any xB (x1, r/ 2)we have x (t)B (x1 , r
) for |t| < r2 . Consequently B x1 , r2 r2 , r2 W .
Now the rest of the proof follows the idea that there is a small
enoughneighborhood V of x0 such that F (V, t0)B (x1 , r/ 2) by
Theorem 16 whichguarantees V
t0
r
2 , t0 +r
2
W since
F F (V, t0 ) , r2 , r2 = F V, t0 r2 , t 0 + r2by the local group
property. Theorem 16 requires only there be a set on whichE1 is
satised uniformly by some > 0. Then V := B x0, et 0 r4 is
suffi-cient. Now to show the set for Theorem 16 exists. Notice 0, t
0 + r2 is compact
and so its continuous image x 0 0, t0 + r2 M is compact. For
each t 0, t0 + r2 there is a ball B (x 0 (t) , r t )M with r t >
0 on which Condition
E1 is satised with t . These neighborhoods cover x 0 0, t 0 + r2
, so there is
a nite subcover {B (x 0 (t i ) , r t i ) |i = 1 ,...,n }. Let :=
max {i |i = 1 ,...,n },let U := ni=1 B (x 0 (t i ) , r t i ) and
let M \U denote the set complement. Thefunction f : 0, t 0 + r2 R
dened by f (t) := d (x 0 (t) , M \U ) is positiveand continuous on
a compact domain and so has a minimum m > 0. There-fore any y x
0 0, t0 +
r2 has a neighborhood ball B (y, m ) U and
therefore any solution curve which stays within a distance of m
of the pathx 0 0, t 0 + r2 will have a uniform satisfying E1.
Therefore Theorem 16
applies and we can choose V := B x0 , et 0 r4 as explained
above, giving(x0 , t0)V t0 r2 , t 0 + r2 W and W is open. (In fact
we have provenV
0, t0 + r
2
W .)Now proving continuity is easy. Since X is an arc eld, it
has locally bounded
speed and there exists r > 0 and a local bound on speed := (x
0 (t0) , r ) < for X y for all yB (x (t0 ) , r ), in particular
Lemma 21 requires the speed of x 0 (t) be bounded by for all t with
|t t0| < r2 . Using Theorem 16 (on theset constructed in the
previous paragraph for which is uniform) and Lemma
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
43/185
1.1. GENERATING FLOWS WITH ARC FIELDS 17
21, as (x, t ) (x0 , t0) we haved (F (x, t ) , F (x0 , t0))
= d (x (t) , x0 (t0)) d (x (t) , x 0 (t)) + d (x0 (t0) , x 0
(t)) e( |t 0 |+1) d (x0 , x) + (x (t0) , r ) |t0 t| 0.
For xed t it is clear F t is a local lipeomorphism, when dened,
by Theorem16.
1.1.3 Global owsWe now investigate conditions which guarantee
local ows are in fact global,i.e., (x , x ) = R for all xM . To
achieve this, we mimic ODE theory.
Example 23 Consider the classic elementary example of quadratic
speed growth x = f (x)
where f : R R is the (locally Lipschitz ) vector eld given by f
(x) = x2 which has solutions x (t) :=
x01 tx 0
so that when the initial condition is x (0) = x0 =
0, the solutions blow up at time t = 1 /x 0 . The vector eld f
(x) = x2 grows too quickly as solutions x grow, sending x to in
nite time.
To guarantee globally dened ows, rst the space cannot have
holes, i.e.,M must be complete. Secondly we must limit the
magnitude of the vector eldto prevent the situation in Example 23,
which inspires the following
Denition 24 An arc eld X on a metric space M is said to have
linear speed growth if there is a point xM and positive constants
c1 and c2 such that for all r > 0 (x, r ) c1 r + c2 , (1.11)
where (x, r ) is the local bound on speed given in Denition
10.
If y is any other point in X then B (y, r )B (x, d (x, y ) + r )
. Thus,
(y, r ) (x, d (x, y ) + r ) c1 (x) (d (x, y ) + r ) + c2 (x)= c1
(x) r + ( c1 (x) d (x, y ) + c2 (x)) .
Hence, if the relation (1.11) holds for a point x, then for any
other yX wealso have
(y, r ) c1 (y) r + c2 (y) , (1.12)where c1 (y) = c1 (x) and c2
(y) = c1 (x) d (x, y ) + c2 (x).Theorem 25 Let X be an arc eld on a
complete metric space M , which sat-ises E1 and E2 and has linear
speed growth. Then F has domain W = M R,i.e., F is a ow .
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
44/185
18 CHAPTER 1. FLOWS
Proof. A similar proof in this context of metric spaces appears
in [18]. Mostother proofs on manifolds can be easily transferred to
our current situation.
Assume t 0 (the case t < 0 being similar). Then for any
partition 0 =t1 < t 2 < ... < t n +1 = t of [0, t ] we
haved (x (t) , x) d (x (t) , x (0))
n
i=1d (x (t i ) , x (t i+1 ))
n
i=1 (x (s i )) |t i+1 t i |
for some choice of s i[t i , t i+1 ] which leads to
d (x (t) , x) t0 (x (s)) ds t0 c1 (x) d (x (s) , x) + c2 (x)
ds.In other words, for f (t) := d (x (t) , x) we wish to use the
inequality
f (t)
t
0
c1f (s) + c2ds (1.13)
to bound f . In fact (1.13) gives
D + f (t) := limh0+
f (t + h) f (t)h c1f (t) + c2 .
As motivation, the solution of x (t) = c1x (t) + c2 satisfying x
(0) = 0 isx (t) = c2c1 (e
c1 t 1). Since we expect f (t) x (t) and f (0) = 0 , we expect f
to grow at most exponentially. Then assuming the domain (x , x )
has x < we would have by continuity and the boundedness of f
that x can be continuedto have x (x )M . But then the fundamental
theorem allows us to continuex beyond x giving us the
contradiction.
A ow is sometimes called a full ow, or a global ow, or a
completeow to distinguish it from a local ow. Since local ows are
continuousandcontinuity is a local propertyfull ows are
continuous.
Example 26 The support of an arc eld X is the closure of the set
S :=
{xM |X m 0}. Here 0 is the constant arc eld 0x (t) = x. Assuming
E1 and E2 on a locally complete space M , it is easy to see that
when the support of X is compact, the ow F is complete; in
particular if M is compact all such X give complete ows.
Example 27 Every local ow on a metric space is generated by an
arc eld.Any local ow F gives rise to an arc eld F : M [1, 1] M
dened by
F (x, t ) :=F (x, t ) if t
x2 ,
x2
F x, x2 if t1, x2F x, x2 if t
x2 , 1 .
The issue here is that F , being a local ow, may have [1, 1] (x
, x ), sowe have to be careful at the endpoints. Clearly the local
ow generated by F is F . Since all our concerns with arc elds are
local, we will never focus on t /
x2 ,
x2 and henceforth we will not notationally distinguish between F
and
F as arc elds.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
45/185
1.2. FORWARD FLOWS AND FIXED POINTS 19
With this identication of ows being arc elds (but not usually
vice -versa )we may simplify Corollary 14 to:
Corollary 28 X F if X satises E1 and E2.
Examples relevant to this chapter occur in Chapter 7 and Example
100.
1.2 Forward ows and xed pointsIn many applications the solution
of a differential equation, or vector eld is notdened for t < 0.
For example, diffusion phenomena is usually only tractableforward
in time. In this case we work with forward ows (also called
semi-ows , or in the context of operators on Banach spaces,
semi-groups ). We listhere the minor modications to the above
theory for this more general situation,then prove a simple xed
point theorem. We dont bother to stress much newforward-specic
terminology, as it should be clear from context whether we
meanforward or bidirectional in any examples.
Change the domain of arcs on M from c : [1, 1] M to c : [0, 1] M
and similarly replace [1, 1] with [0, 1] everywhere it occurs,
e.g., (forward) arcelds are dened as maps X : M [0, 1] M .
Solutions x : [0, x ) M areforward tangent to X dened by
limh0+
d ( (t + h) , X ( (t) , h))h
= 0 ,
i.e., t and h are restricted to positive values. We explicitly
spell out the minorchanges to Conditions E1 and E2 since a new
possibility of allowing negativeX will prove to be useful.
Condition E1: For each x0M , there are constants r > 0, >
0 and Rsuch that for all x, yB (x0 , r ) and t[0, )
d (X t (x) , X t (y)) d (x, y ) (1 + t) .Condition E2 :
d (X s + t (x) , X t (X s (x))) = O (st )
for 0 t s as s 0, locally uniformly in x.Corollary 29 Let X be
an arc eld satisfying E1 and E2 on a locally complete metric space
M . Then given any point x M , there exists a unique solution x :
[0, x ) M with initial condition x (0) = x.
Proof. Follow the proof of Theorem 12.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
46/185
20 CHAPTER 1. FLOWS
Corollary 30 Let X be an arc eld on a complete metric space M ,
which satises E1 and E2. Solutions x : [0, x )
M satisfy
x (s ) (t) = x (s + t)
for s, t 0 and s + t < x . Dening W M R+ by W : = {(x, t
)|t[0, x )} and F : W M by F (x, t ) := x (t)
we know F is continuous and (i) M {0} W and F (x, 0) = x for all
xM (identity at 0 property )(ii ) F (t, F (s, x )) = F (t + s, x )
(1-parameter local semi-group property )(iii ) For each xM , F (x,
) : [0, x ) M is the maximal solution x to X .If in addition X has
linear speed growth, then F has domain W = M R+ ,i.e., F is a
forward ow .
Proof. Use Corollary 29 and adapt the proof of Theorem 22.
Theorem 31 Let X be an arc eld on a complete metric space M,
which has linear speed growth and satises Conditions E1 and E2,
with < 0 uniformly valid for al l of M . Then the forward ow F :
M [0, ) M of X has a unique xed point. That is, there exists pM ,
such that for all t 0, F ( p,t) = p, and if F (x, t 0) = x for some
t0 > 0, then x = p. Furthermore, the ow converges tothe xed
point exponentially :
d (F (x, t ) , p) = d (F (x, t ) , F ( p,t)) et d (x, p) .Proof.
Theorem 16 is valid mutatis mutandis and gives
d (F (a, t ) , F (b, t))
eK A t d (a, b) .
Thus, F t := F (, t ) is a contraction mapping for t > 0 on M
, and therefore hasa unique xed point, say pt , by the Contraction
Mapping Theorem (Theorem119, Appendix A.1). Note pt is a continuous
function of t , since
d ( pt , pt ) = d (F ( pt , t ) , F ( pt , t ))
d (F ( pt , t ) , F ( pt , t )) + d (F ( pt , t ) , F ( pt , t
)) eK A t d ( pt , pt ) + d (F ( pt , t ) , F ( pt , t )) d ( pt ,
pt )
d (F ( pt , t ) , F ( pt , t ))1 eK A t
0 as t tby the continuity of F . The 1-parameter local semigroup
property of F gives
pt = F ( pt , t ) = F (F ( pt , t ) , t ) = F ( pt , 2t) =
= F ( pt , nt )
for any positive integer n. Hence, pnt = pt and further pi/j =
pi = p1 for allpositive integers i and j . Since t pt is continuous
and constant on the positiverationals, pt = p1 for all t >
0.
See Chapter 7 for examples in H (Rn ). Theorem 33 in the next
section dealswith the more general question of invariant sets
instead of just xed points.
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
47/185
1.3. INVARIANT SETS 21
1.3 Invariant sets
Denition 32 A set S M is dened to be locally uniformly tangent
to
X if d (X t (x) , S ) = o (t)
locally uniformly for xS , denoted S X .S is invariant under the
ow F if for any xS we have F t (x)S for all t(x , x ).
The next theorem is a metric space generalization of the
Nagumo-BrzisInvariance Theorem (Example 11 shows how this
generalizes the Banach spacesetting). The bidirectional case is
given, but the result obviously holds also forforward ows mutatis
mutandis . Cf. [50] for an exposition on general
invariancetheorems.
Theorem 33 Let X satisfy E1 and E2 and assume a closed set S M
has S X . Then S is an invariant set of the ow F .
Proof. By choosing x S this theorem is an immediate corollary of
thefollowing, slightly stronger fact:
Lemma 34 Let x : (, ) U M be a solution to X which meets
Condition E1 with uniform constant on a neighborhood U . Assume S U
is a closed set with S X . Then d (x (t) , S ) e|t |d (x, S ) for
all t(, ) .
Proof. (Adapted from the proof of Theorem 16, due to David
Bleecker.)We check only t > 0. Dene g (t) := et d (x (t) , S ).
For h 0, we have
g (t + h) g (t) = e( t + h ) d (x (t + h) , S ) et d (x (t) , S
)e( t + h ) [d (x (t + h) , X h (x (t))) + d (X h (x (t)) , X h
(y)) + d (X h (y) , S )]
et d (x (t) , S )for any yS, which in turn is
e( t + h ) [d (X h (x (t)) , X h (y)) + o (h)] et d (x (t) , S
)et eh d (x (t) , y) (1 + h) et d (x (t) , S ) + o (h)= eh (1 + h)
d (x (t) , y) d (x (t) , S ) et + o (h) .
Therefore
g (t + h) g (t) eh
(1 + h) 1 et
d (x (t) , S ) + o (h)since y was arbitrary in S . Thus
g (t + h) g (t)o (h) et d (x (t) , S ) + o (h) = o (h) (g (t) +
1) .
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
48/185
22 CHAPTER 1. FLOWS
Hence, the upper forward derivative of g (t) is nonpositive;
i.e.,
D + g (t) := limh0+
g (t + h) g (t)h 0.
Consequently, g (t) g (0) ord (x (t) , S ) et d (x (0) , S ) =
et d (x, S ) .
Theorem 33 will be used to piece together local integral
surfaces to getfoliations in 3.4. Also see Example 87.
1.4 Commutativity of owsThe following theorem is valid for both
bidirectional and forward ows.
Theorem 35 Let X and Y be arc elds on a complete metric space M
which satisfy Conditions E1 and E2. Let F and G be the local ows
generated by X and Y , respectively. If
d (Y t X t (x) , X t Y t (x)) = o t2 (1.14)
locally uniformly in x then
F s Gt = Gt F s
that is, the ows commute.
Proof. (1.14) means for any x M there exists a neighborhood U
:=B (x, ) and a function with limt0
(t) = 0 such that for all y U we haved (Y t X t (y) , X t Y t
(y)) t2 (t). By shrinking U if necessary, both arc elds willsatisfy
E1 and E2 uniformly on U for some constants > 1 and , and
alsothe speeds of X and Y are uniformly bounded by > 0. For the
time beingwe assume s and t are sufficiently small so all the
compositions of X and Y appearing below remain in U, i.e., |s| ,
|t| < / (2). In the last paragraph of theproof, continuation
will eliminate this restriction on s and t.
The calculations can become a little convoluted, but using
Figure **add it!**you might nd it easier to construct your own
proof than to read this one.
Let us rst check the theorem in the case s = t. This next
estimate is thelinchpin of the proof.
Lemma: d (Y r X r )i (x) , (X r Y r )i (x) r (r ) (1 + r)2i
(1.15)
-
8/14/2019 Continuous Dynamics On Metric Spaces by Craig
Calcaterra
49/185
1.4. COMMUTATIVITY OF FLOWS 23
Let us verify this estimate. Denote x j := ( Y r X r )j (x)
d (Y r X r )i (x) , (X r Y r )i (x)
i1k=0
d (X r Y r )k (Y r X r )ik (x) , (X r Y r )k+1 (Y r X r )i



















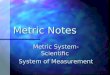

![Std Specs Rev 8 Metric [9/25/98 Metric]](https://img.pdfslide.net/doc/110x75/61ae7e9c0229c362f478fa5d/std-specs-rev-8-metric-92598-metric.jpg)




