Embed Size (px)
Citation preview
Controllability of a string submitted to unilateralconstraints
Farid Ammar KhodjaLaboratoire de Mathématiques de Besançon
France
joint work with S. Micu (U. Craïova, Romania)and A. Münch (U. Clermont-Ferrand, France)
CDPS 2011 - July 18-22, 2011- Wuppertal
Farid AK (LM Besançon) Controllability 07/11 1 / 19
Introduction
Let T > 0 . We consider the nonlinear control problem:8>>>><>>>>:y 00 yxx = 0, (t, x) 2 (0,T ) (0, 1),y(t, 0) = u(t), t 2 (0,T ),y(t, 1) ψ(t), yx (t, 1) 0,(y(t, 1) ψ(t))yx (t, 1) = 0,
t 2 (0,T ),
y(0, x) = y0(x), y 0(0, x) = y1(x), x 2 (0, 1)
(1)
u 2 L2 (0,T ) will be a control function;ψ 2 H1 (0,T ) is a given obstacle;y0, y1
2 L2 (0, 1)H1 (0, 1) .
Farid AK (LM Besançon) Controllability 07/11 2 / 19
Introduction
Problem: Given T > 0and
y0, y1
,z0, z1
2 L2 (0, 1)H1 (0, 1) , does there exist
u 2 L2 (0,T ) such that y(T ) z0, y 0(T ) z1 on (0, 1) ?
Farid AK (LM Besançon) Controllability 07/11 3 / 19
Bibliography
Well-posedness in higher space dimensions:
1 G. Lebeau and M. Schatzman, A wave problem in a half space with aunilateral constraint at the boundary, J. Di¤erential Equations, 53(1984), 309-361.
2 J.U. Kim, A boundary thin obstacle problem for a wave equation,Commun. in Partial Di¤erential Equation, 14 (1989), 1011-1026.
These works just deal with well-posedness (no control) of:8>>>>>>>>><>>>>>>>>>:
y 00 ∆y = 0, (0,T )Ω
y 0, ∂y∂n 0
y . ∂y∂n = 0
(0,T ) ∂Ω
y0, y1
Lebeau-Schatzman for particular domains and Kim for smooth domains.
Farid AK (LM Besançon) Controllability 07/11 4 / 19
Bibliography
Well-posedness in higher space dimensions:
1 G. Lebeau and M. Schatzman, A wave problem in a half space with aunilateral constraint at the boundary, J. Di¤erential Equations, 53(1984), 309-361.
2 J.U. Kim, A boundary thin obstacle problem for a wave equation,Commun. in Partial Di¤erential Equation, 14 (1989), 1011-1026.
These works just deal with well-posedness (no control) of:8>>>>>>>>><>>>>>>>>>:
y 00 ∆y = 0, (0,T )Ω
y 0, ∂y∂n 0
y . ∂y∂n = 0
(0,T ) ∂Ω
y0, y1
Lebeau-Schatzman for particular domains and Kim for smooth domains.
Farid AK (LM Besançon) Controllability 07/11 4 / 19
Bibliography
Well-posedness in higher space dimensions:
1 G. Lebeau and M. Schatzman, A wave problem in a half space with aunilateral constraint at the boundary, J. Di¤erential Equations, 53(1984), 309-361.
2 J.U. Kim, A boundary thin obstacle problem for a wave equation,Commun. in Partial Di¤erential Equation, 14 (1989), 1011-1026.
These works just deal with well-posedness (no control) of:8>>>>>>>>><>>>>>>>>>:
y 00 ∆y = 0, (0,T )Ω
y 0, ∂y∂n 0
y . ∂y∂n = 0
(0,T ) ∂Ω
y0, y1
Lebeau-Schatzman for particular domains and Kim for smooth domains.Farid AK (LM Besançon) Controllability 07/11 4 / 19
Bibliography
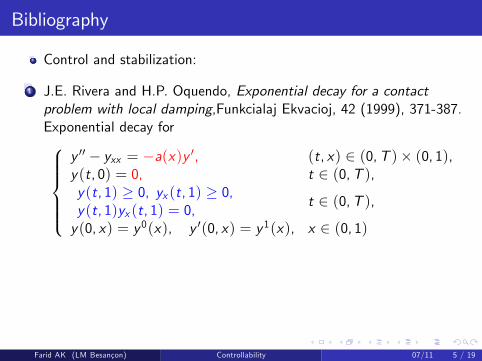
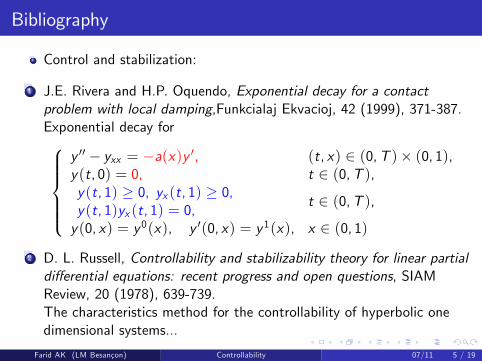
Control and stabilization:
1 J.E. Rivera and H.P. Oquendo, Exponential decay for a contactproblem with local damping,Funkcialaj Ekvacioj, 42 (1999), 371-387.Exponential decay for8>>>><>>>>:
y 00 yxx = a(x)y 0, (t, x) 2 (0,T ) (0, 1),y(t, 0) = 0, t 2 (0,T ),y(t, 1) 0, yx (t, 1) 0,y(t, 1)yx (t, 1) = 0,
t 2 (0,T ),
y(0, x) = y0(x), y 0(0, x) = y1(x), x 2 (0, 1)
2 D. L. Russell, Controllability and stabilizability theory for linear partialdi¤erential equations: recent progress and open questions, SIAMReview, 20 (1978), 639-739.The characteristics method for the controllability of hyperbolic onedimensional systems...
Farid AK (LM Besançon) Controllability 07/11 5 / 19
Bibliography
Control and stabilization:
1 J.E. Rivera and H.P. Oquendo, Exponential decay for a contactproblem with local damping,Funkcialaj Ekvacioj, 42 (1999), 371-387.Exponential decay for8>>>><>>>>:
y 00 yxx = a(x)y 0, (t, x) 2 (0,T ) (0, 1),y(t, 0) = 0, t 2 (0,T ),y(t, 1) 0, yx (t, 1) 0,y(t, 1)yx (t, 1) = 0,
t 2 (0,T ),
y(0, x) = y0(x), y 0(0, x) = y1(x), x 2 (0, 1)
2 D. L. Russell, Controllability and stabilizability theory for linear partialdi¤erential equations: recent progress and open questions, SIAMReview, 20 (1978), 639-739.The characteristics method for the controllability of hyperbolic onedimensional systems...
Farid AK (LM Besançon) Controllability 07/11 5 / 19
Bibliography
Control and stabilization:
1 J.E. Rivera and H.P. Oquendo, Exponential decay for a contactproblem with local damping,Funkcialaj Ekvacioj, 42 (1999), 371-387.Exponential decay for8>>>><>>>>:
y 00 yxx = a(x)y 0, (t, x) 2 (0,T ) (0, 1),y(t, 0) = 0, t 2 (0,T ),y(t, 1) 0, yx (t, 1) 0,y(t, 1)yx (t, 1) = 0,
t 2 (0,T ),
y(0, x) = y0(x), y 0(0, x) = y1(x), x 2 (0, 1)
2 D. L. Russell, Controllability and stabilizability theory for linear partialdi¤erential equations: recent progress and open questions, SIAMReview, 20 (1978), 639-739.The characteristics method for the controllability of hyperbolic onedimensional systems...
Farid AK (LM Besançon) Controllability 07/11 5 / 19
Main result
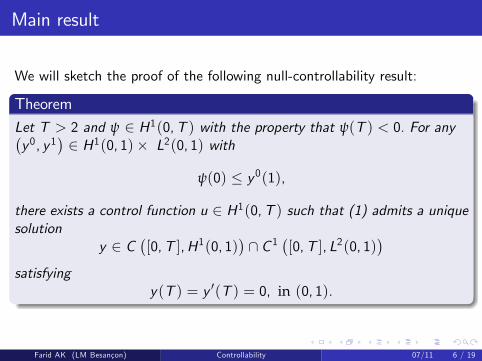
We will sketch the proof of the following null-controllability result:
TheoremLet T > 2 and ψ 2 H1(0,T ) with the property that ψ(T ) < 0. For anyy0, y1
2 H1(0, 1) L2(0, 1) with
ψ(0) y0(1),
there exists a control function u 2 H1(0,T ) such that (1) admits a uniquesolution
y 2 C[0,T ],H1(0, 1)
\ C 1
[0,T ], L2(0, 1)
satisfying
y(T ) = y 0(T ) = 0, in (0, 1).
Farid AK (LM Besançon) Controllability 07/11 6 / 19
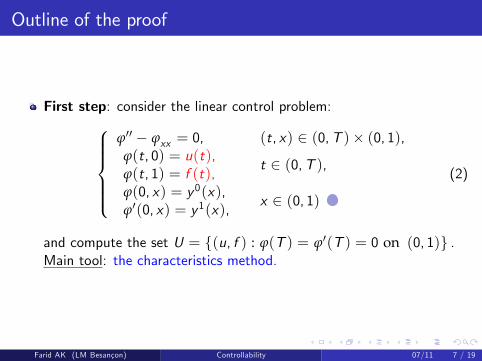
Outline of the proof
First step: consider the linear control problem:8>>>><>>>>:ϕ00 ϕxx = 0, (t, x) 2 (0,T ) (0, 1),ϕ(t, 0) = u(t),ϕ(t, 1) = f (t),
t 2 (0,T ),
ϕ(0, x) = y0(x),ϕ0(0, x) = y1(x),
x 2 (0, 1)
(2)
and compute the set U = f(u, f ) : ϕ(T ) = ϕ0(T ) = 0 on (0, 1)g .Main tool: the characteristics method.
Farid AK (LM Besançon) Controllability 07/11 7 / 19
Outline of the proof
Second step: consider and study the Dirichlet-Neumann map:
Ay0, y1, u, f
= ϕx (, 1)
Main tool: an idea from Lebeau-Schatzman
Third step: Study the equivalent problem:
f ψAy0, y1, u, f
0
(f ψ)Ay0, y1, u, f
= 0
, (0,T ) . (3)
Main tool: Di¤erential inequalities or penalty method.
Farid AK (LM Besançon) Controllability 07/11 8 / 19
Outline of the proof
Second step: consider and study the Dirichlet-Neumann map:
Ay0, y1, u, f
= ϕx (, 1)
Main tool: an idea from Lebeau-Schatzman
Third step: Study the equivalent problem:
f ψAy0, y1, u, f
0
(f ψ)Ay0, y1, u, f
= 0
, (0,T ) . (3)
Main tool: Di¤erential inequalities or penalty method.
Farid AK (LM Besançon) Controllability 07/11 8 / 19
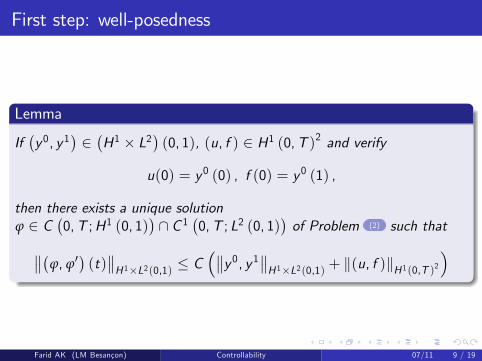
First step: well-posedness
Lemma
Ify0, y1
2H1 L2
(0, 1), (u, f ) 2 H1 (0,T )2 and verify
u(0) = y0 (0) , f (0) = y0 (1) ,
then there exists a unique solutionϕ 2 C
0,T ;H1 (0, 1)
\ C 1
0,T ; L2 (0, 1)
of Problem (2) such that ϕ, ϕ0
(t) H 1L2(0,1) C
y0, y1 H 1L2(0,1) + k(u, f )kH 1(0,T )2
Farid AK (LM Besançon) Controllability 07/11 9 / 19
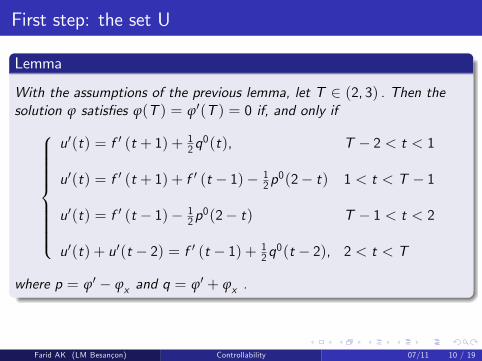
First step: the set U
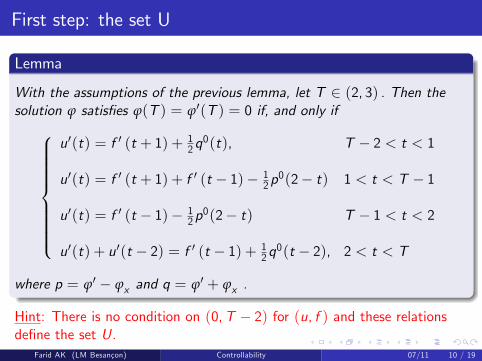
Lemma
With the assumptions of the previous lemma, let T 2 (2, 3) . Then thesolution ϕ satises ϕ(T ) = ϕ0(T ) = 0 if, and only if8>>>>>>>><>>>>>>>>:
u0(t) = f 0 (t + 1) + 12q0(t), T 2 < t < 1
u0(t) = f 0 (t + 1) + f 0 (t 1) 12p0(2 t) 1 < t < T 1
u0(t) = f 0 (t 1) 12p0(2 t) T 1 < t < 2
u0(t) + u0(t 2) = f 0 (t 1) + 12q0(t 2), 2 < t < T
where p = ϕ0 ϕx and q = ϕ0 + ϕx .
Hint: There is no condition on (0,T 2) for (u, f ) and these relationsdene the set U.
Farid AK (LM Besançon) Controllability 07/11 10 / 19
First step: the set U
Lemma
With the assumptions of the previous lemma, let T 2 (2, 3) . Then thesolution ϕ satises ϕ(T ) = ϕ0(T ) = 0 if, and only if8>>>>>>>><>>>>>>>>:
u0(t) = f 0 (t + 1) + 12q0(t), T 2 < t < 1
u0(t) = f 0 (t + 1) + f 0 (t 1) 12p0(2 t) 1 < t < T 1
u0(t) = f 0 (t 1) 12p0(2 t) T 1 < t < 2
u0(t) + u0(t 2) = f 0 (t 1) + 12q0(t 2), 2 < t < T
where p = ϕ0 ϕx and q = ϕ0 + ϕx .
Hint: There is no condition on (0,T 2) for (u, f ) and these relationsdene the set U.
Farid AK (LM Besançon) Controllability 07/11 10 / 19
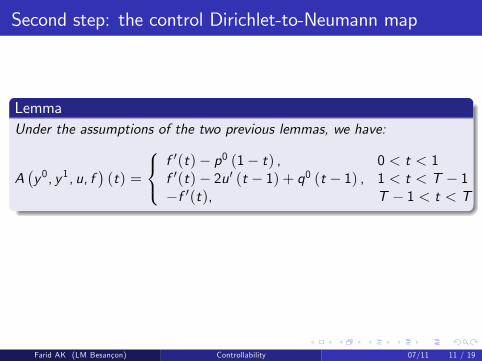
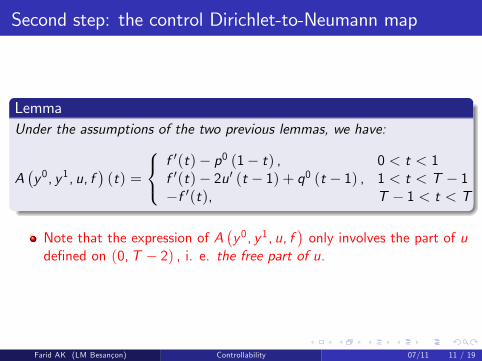
Second step: the control Dirichlet-to-Neumann map
LemmaUnder the assumptions of the two previous lemmas, we have:
Ay0, y1, u, f
(t) =
8<:f 0(t) p0 (1 t) , 0 < t < 1f 0(t) 2u0 (t 1) + q0 (t 1) , 1 < t < T 1f 0(t), T 1 < t < T
Note that the expression of Ay0, y1, u, f
only involves the part of u
dened on (0,T 2) , i. e. the free part of u.
Farid AK (LM Besançon) Controllability 07/11 11 / 19
Second step: the control Dirichlet-to-Neumann map
LemmaUnder the assumptions of the two previous lemmas, we have:
Ay0, y1, u, f
(t) =
8<:f 0(t) p0 (1 t) , 0 < t < 1f 0(t) 2u0 (t 1) + q0 (t 1) , 1 < t < T 1f 0(t), T 1 < t < T
Note that the expression of Ay0, y1, u, f
only involves the part of u
dened on (0,T 2) , i. e. the free part of u.
Farid AK (LM Besançon) Controllability 07/11 11 / 19
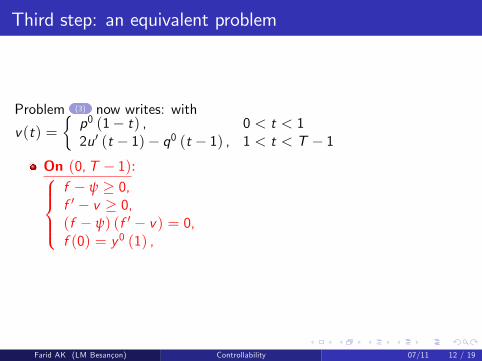
Third step: an equivalent problem
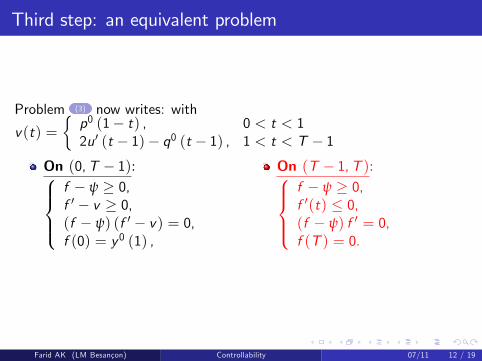
Problem (3) now writes: with
v(t) =p0 (1 t) , 0 < t < 12u0 (t 1) q0 (t 1) , 1 < t < T 1
On (0,T 1):8>><>>:f ψ 0,f 0 v 0,(f ψ) (f 0 v) = 0,f (0) = y0 (1) ,
On (T 1,T ):8>><>>:f ψ 0,f 0(t) 0,(f ψ) f 0 = 0,f (T ) = 0.
Farid AK (LM Besançon) Controllability 07/11 12 / 19
Third step: an equivalent problem
Problem (3) now writes: with
v(t) =p0 (1 t) , 0 < t < 12u0 (t 1) q0 (t 1) , 1 < t < T 1
On (0,T 1):8>><>>:f ψ 0,f 0 v 0,(f ψ) (f 0 v) = 0,f (0) = y0 (1) ,
On (T 1,T ):8>><>>:f ψ 0,f 0(t) 0,(f ψ) f 0 = 0,f (T ) = 0.
Farid AK (LM Besançon) Controllability 07/11 12 / 19
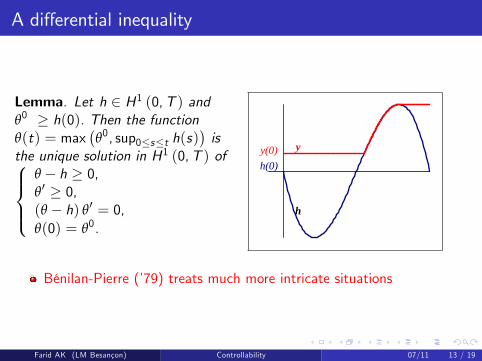
A di¤erential inequality
Lemma. Let h 2 H1 (0,T ) andθ0 h(0). Then the functionθ(t) = max
θ0, sup0st h(s)
is
the unique solution in H1 (0,T ) of8>><>>:θ h 0,θ0 0,(θ h) θ0 = 0,θ(0) = θ0.
h
yy(0)h(0)
Bénilan-Pierre (79) treats much more intricate situations
Farid AK (LM Besançon) Controllability 07/11 13 / 19
Proof: using di¤erential inequalities
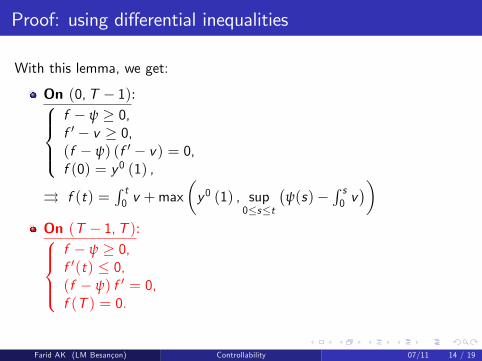
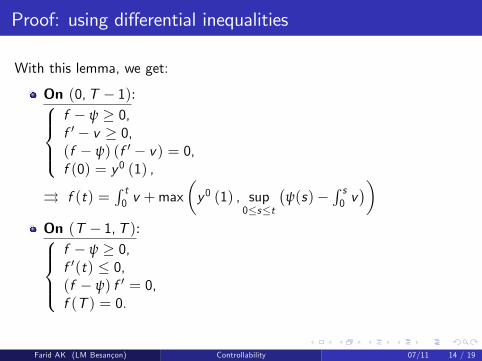
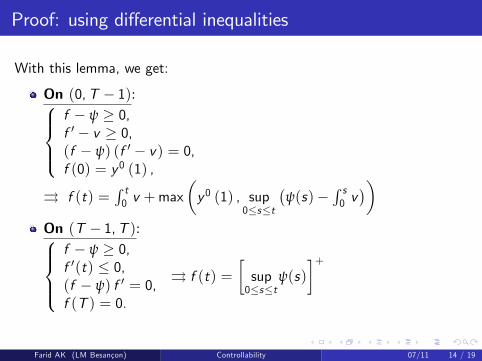
With this lemma, we get:
On (0,T 1):8>><>>:f ψ 0,f 0 v 0,(f ψ) (f 0 v) = 0,f (0) = y0 (1) ,
f (t) =R t0 v +max
y0 (1) , sup
0st
ψ(s)
R s0 v
On (T 1,T ):8>><>>:f ψ 0,f 0(t) 0,(f ψ) f 0 = 0,f (T ) = 0.
f (t) =sup0st
ψ(s)+
Farid AK (LM Besançon) Controllability 07/11 14 / 19
Proof: using di¤erential inequalities
With this lemma, we get:
On (0,T 1):8>><>>:f ψ 0,f 0 v 0,(f ψ) (f 0 v) = 0,f (0) = y0 (1) ,
f (t) =R t0 v +max
y0 (1) , sup
0st
ψ(s)
R s0 v
On (T 1,T ):8>><>>:f ψ 0,f 0(t) 0,(f ψ) f 0 = 0,f (T ) = 0.
f (t) =sup0st
ψ(s)+
Farid AK (LM Besançon) Controllability 07/11 14 / 19
Proof: using di¤erential inequalities
With this lemma, we get:
On (0,T 1):8>><>>:f ψ 0,f 0 v 0,(f ψ) (f 0 v) = 0,f (0) = y0 (1) ,
f (t) =R t0 v +max
y0 (1) , sup
0st
ψ(s)
R s0 v
On (T 1,T ):8>><>>:f ψ 0,f 0(t) 0,(f ψ) f 0 = 0,f (T ) = 0.
f (t) =sup0st
ψ(s)+
Farid AK (LM Besançon) Controllability 07/11 14 / 19
Proof: using di¤erential inequalities
With this lemma, we get:
On (0,T 1):8>><>>:f ψ 0,f 0 v 0,(f ψ) (f 0 v) = 0,f (0) = y0 (1) ,
f (t) =R t0 v +max
y0 (1) , sup
0st
ψ(s)
R s0 v
On (T 1,T ):8>><>>:f ψ 0,f 0(t) 0,(f ψ) f 0 = 0,f (T ) = 0.
f (t) =sup0st
ψ(s)+
Farid AK (LM Besançon) Controllability 07/11 14 / 19
Proof: using di¤erential inequalities
With this lemma, we get:
On (0,T 1):8>><>>:f ψ 0,f 0 v 0,(f ψ) (f 0 v) = 0,f (0) = y0 (1) ,
f (t) =R t0 v +max
y0 (1) , sup
0st
ψ(s)
R s0 v
On (T 1,T ):8>><>>:f ψ 0,f 0(t) 0,(f ψ) f 0 = 0,f (T ) = 0.
f (t) =sup0st
ψ(s)+
Farid AK (LM Besançon) Controllability 07/11 14 / 19
Proof: using di¤erential inequalities
To end the proof with this method, it remains to prove that thereexists u such that f 2 H1 (0,T ) .
LemmaThere exists u such that f 2 H1 (0,T ) .
This amounts to nd u such that
limt!(T1)
f (t) = limt!(T1)+
f (t)
At this level, the fact that u is free on (0,T 2) is used and this lastcondition is a control problem!
Farid AK (LM Besançon) Controllability 07/11 15 / 19
Proof: using di¤erential inequalities
To end the proof with this method, it remains to prove that thereexists u such that f 2 H1 (0,T ) .
LemmaThere exists u such that f 2 H1 (0,T ) .
This amounts to nd u such that
limt!(T1)
f (t) = limt!(T1)+
f (t)
At this level, the fact that u is free on (0,T 2) is used and this lastcondition is a control problem!
Farid AK (LM Besançon) Controllability 07/11 15 / 19
Proof: using di¤erential inequalities
To end the proof with this method, it remains to prove that thereexists u such that f 2 H1 (0,T ) .
LemmaThere exists u such that f 2 H1 (0,T ) .
This amounts to nd u such that
limt!(T1)
f (t) = limt!(T1)+
f (t)
At this level, the fact that u is free on (0,T 2) is used and this lastcondition is a control problem!
Farid AK (LM Besançon) Controllability 07/11 15 / 19
Comments
An alternative proof of this result is to consider the penalizedproblem: ε > 08>><>>:
y 00ε yε,xx = 0, (0,T ) (0, 1),yε(t, 0) = u(t), (0,T ),yx ,ε (t, 1) = ε1 [yε(t, 1) ψ(t)] (0,T ),yε(0, x) = y0(x), y 0ε(0, x) = y
1(x), (0, 1)
and use the control Dirichlet-to-Neumann map to reduce this problemto a di¤erential equation on (0,T ) at x = 1.
If T = 2, the two methods of proof do not work without restrictionson the initial data.
Farid AK (LM Besançon) Controllability 07/11 16 / 19
Comments
An alternative proof of this result is to consider the penalizedproblem: ε > 08>><>>:
y 00ε yε,xx = 0, (0,T ) (0, 1),yε(t, 0) = u(t), (0,T ),yx ,ε (t, 1) = ε1 [yε(t, 1) ψ(t)] (0,T ),yε(0, x) = y0(x), y 0ε(0, x) = y
1(x), (0, 1)
and use the control Dirichlet-to-Neumann map to reduce this problemto a di¤erential equation on (0,T ) at x = 1.
If T = 2, the two methods of proof do not work without restrictionson the initial data.
Farid AK (LM Besançon) Controllability 07/11 16 / 19
Comments
With one of the two methods: an exact controllability result:
TheoremLet T > 2 and ψ 2 H1(0,T ). For anyy0, y1
,z0, z1
2 H1(0, 1) L2(0, 1) with
ψ(0) y0(1), ψ(T ) z0(1)
there exists a control function u 2 H1(0,T ) such that (1) admits a uniquesolution
y 2 C[0,T ],H1(0, 1)
\ C 1
[0,T ], L2(0, 1)
satisfying
y(T ) = z0, y 0(T ) = z1, in (0, 1).
For details: FAK, S. Micu, A. Münch, Controllability of a stringsubmitted to unilateral constraint, Annales de lInstitut HenriPoincaré - Analyse non linéaire (2010).
Farid AK (LM Besançon) Controllability 07/11 17 / 19
Comments
With one of the two methods: an exact controllability result:
TheoremLet T > 2 and ψ 2 H1(0,T ). For anyy0, y1
,z0, z1
2 H1(0, 1) L2(0, 1) with
ψ(0) y0(1), ψ(T ) z0(1)
there exists a control function u 2 H1(0,T ) such that (1) admits a uniquesolution
y 2 C[0,T ],H1(0, 1)
\ C 1
[0,T ], L2(0, 1)
satisfying
y(T ) = z0, y 0(T ) = z1, in (0, 1).
For details: FAK, S. Micu, A. Münch, Controllability of a stringsubmitted to unilateral constraint, Annales de lInstitut HenriPoincaré - Analyse non linéaire (2010).
Farid AK (LM Besançon) Controllability 07/11 17 / 19
Comments
With one of the two methods: an exact controllability result:
TheoremLet T > 2 and ψ 2 H1(0,T ). For anyy0, y1
,z0, z1
2 H1(0, 1) L2(0, 1) with
ψ(0) y0(1), ψ(T ) z0(1)
there exists a control function u 2 H1(0,T ) such that (1) admits a uniquesolution
y 2 C[0,T ],H1(0, 1)
\ C 1
[0,T ], L2(0, 1)
satisfying
y(T ) = z0, y 0(T ) = z1, in (0, 1).
For details: FAK, S. Micu, A. Münch, Controllability of a stringsubmitted to unilateral constraint, Annales de lInstitut HenriPoincaré - Analyse non linéaire (2010).
Farid AK (LM Besançon) Controllability 07/11 17 / 19
Open problems
The same problem is open in higher space dimensions.
What is about the control parabolic problem:8>>>><>>>>:y 0 yxx = 0, (0,T ) (0, 1),y(t, 0) = u(t), t 2 (0,T ),y(t, 1) ψ(t), yx (t, 1) 0,(y(t, 1) ψ(t))yx (t, 1) = 0,
t 2 (0,T ),
y(0, x) = y0(x), x 2 (0, 1)
or the same problem in higher space dimensions?
and many others...
Farid AK (LM Besançon) Controllability 07/11 18 / 19
Open problems
The same problem is open in higher space dimensions.
What is about the control parabolic problem:8>>>><>>>>:y 0 yxx = 0, (0,T ) (0, 1),y(t, 0) = u(t), t 2 (0,T ),y(t, 1) ψ(t), yx (t, 1) 0,(y(t, 1) ψ(t))yx (t, 1) = 0,
t 2 (0,T ),
y(0, x) = y0(x), x 2 (0, 1)
or the same problem in higher space dimensions?
and many others...
Farid AK (LM Besançon) Controllability 07/11 18 / 19
Open problems
The same problem is open in higher space dimensions.
What is about the control parabolic problem:8>>>><>>>>:y 0 yxx = 0, (0,T ) (0, 1),y(t, 0) = u(t), t 2 (0,T ),y(t, 1) ψ(t), yx (t, 1) 0,(y(t, 1) ψ(t))yx (t, 1) = 0,
t 2 (0,T ),
y(0, x) = y0(x), x 2 (0, 1)
or the same problem in higher space dimensions?
and many others...
Farid AK (LM Besançon) Controllability 07/11 18 / 19
Thank you for your attention!
Farid AK (LM Besançon) Controllability 07/11 19 / 19