Embed Size (px)
Citation preview

1
Image Analysis
Feature extraction: corners and blobs
University of Ioannina - Department of Computer Science
Christophoros [email protected]
Images taken from:Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill(http://www.cs.unc.edu/~lazebnik/spring10/).D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003.M. Nixon and A. Aguado. Feature Extraction and Image Processing. Academic Press 2010.
2 Corners and Blobs
C. Nikou – Image Analysis (T-14)
3 Motivation: Panorama Stitching
C. Nikou – Image Analysis (T-14)
4Motivation: Panorama Stitching
(cont.)
C. Nikou – Image Analysis (T-14)
Step 1: feature extractionStep 2: feature matching
5Motivation: Panorama Stitching
(cont.)
C. Nikou – Image Analysis (T-14)
Step 1: feature extractionStep 2: feature matchingStep 3: image alignment
6 Characteristics of good features
Repeatability
C. Nikou – Image Analysis (T-14)
• Repeatability– The same feature can be found in several images despite geometric
and photometric transformations.
• Saliency– Each feature has a distinctive description.
• Compactness and efficiency– Many fewer features than image pixels.
• Locality– A feature occupies a relatively small area of the image; robust to
clutter and occlusion.

2
7 Applications
• Feature points are used for:– Motion tracking.– Image alignment. – 3D reconstruction.
Obj t iti
C. Nikou – Image Analysis (T-14)
– Object recognition.– Image indexing and retrieval.– Robot navigation.
8 Image Curvature
• Extends the notion of edges.• Rate of change in edge direction.• Points where the edge direction changes rapidly are
characterized as corners.• We need some elements from differential geometry.
C. Nikou – Image Analysis (T-14)
g y• Parametric form of a planar curve:
( ) [ ( ), ( )]C t x t y t=
• Describes the points in a continuous curve as the endpoints of a position vector.
9 Image Curvature (cont.)
• The tangent vector describes changes in the position vector:
( ) ( ) [ ( ), ( )] ,dx dyT t C t x t y tdt dt
⎡ ⎤= = = ⎢ ⎥⎣ ⎦
C. Nikou – Image Analysis (T-14)
dt dt⎣ ⎦
• Intuitive meaning– think of the trace of the curve as the motion
of a point at time t. – The tangent vector describes the
instantaneous motion.
10 Image Curvature (cont.)
• At any time moment, the point moves with velocity magnitude:
2 2( ) ( ) ( )C t x t y t= +
C. Nikou – Image Analysis (T-14)
1 ( )( ) tan( )
y ttx t
ϕ − ⎛ ⎞= ⎜ ⎟
⎝ ⎠
in the direction:
11 Image Curvature (cont.)
• The curvature at a point C(t) describes the changes in the direction of the tangent with respect to changes in arc length:
( )d
C. Nikou – Image Analysis (T-14)
( )( ) d ttdsϕκ =
• The curvature is given with respect to the arc length because a curve parameterized by the arc length maintains a constant velocity.
12 Image Curvature (cont.)
φ(t)
Gradient direction N(t)
C. Nikou – Image Analysis (T-14)
Tangent T(t)Edge curve C(t)
( )( ) d ttdsϕκ =

3
13 Image Curvature (cont.)
• Parameterization of a planar curve by the arc length is the length of the curve from 0to t: ( )( )
t dC ts t dt= ∫
C. Nikou – Image Analysis (T-14)
0( )
dt∫
• This implies:
2 2
0
( ) ( ) ( ) ( ) ( )tds t d dC t dC tdt x t y t
dt dt dt dt⎛ ⎞
= = = +⎜ ⎟⎝ ⎠∫
14 Image Curvature (cont.)
• Parameterization by the arc length is not unique but it has the property:
( ) ( )( )( ) ( )
dC t dC tdC td d d
C. Nikou – Image Analysis (T-14)
( ) ( ) 1( )
dC t dC t dt dt dtdtds ds dC tds dt dsdt dt dt
= = = = =
15 Image Curvature (cont.)
• Back to the definition of curvature:
( ) ( )( ) d t d t dttds dt dsϕ ϕκ = =
C. Nikou – Image Analysis (T-14)
1
2 2
1tan( ) ( )
d ydt x x t y t
−⎛ ⎞⎛ ⎞= ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠ +
3/22 2
( ) ( ) ( ) ( )( )( ) ( )
x t y t y t x ttx t y t
κ −⇔ =
⎡ ⎤+⎣ ⎦
16 Image Curvature (cont.)
• Some useful relations from differential geometry of planar curves (easily deduced) are:
( ) ( )dC t T tds
=2
2
( ) ( ) ( )dC t t N tds
κ=
C. Nikou – Image Analysis (T-14)
ds ds
• The curvature is the magnitude of the second derivative of the curve with respect to the arc length:
2
2
( )( ) dC ttds
κ =
17 Image Curvature (cont.)
• It is also useful to express the normal vector at a point to a curve in Cartesian coordinates:
( ) ( )( ) ( ) [ ( ) ( )]y t x tN t T t x t y t⎡ ⎤−
= ⊥ =⎢ ⎥
C. Nikou – Image Analysis (T-14)
2 2 2 2( ) , ( ) [ ( ), ( )]
( ) ( ) ( ) ( )N t T t x t y t
x t y t x t y t= ⊥ =⎢ ⎥⎢ + + ⎥⎣ ⎦
18 Image Curvature (cont.)
• There are three main approaches to compute curvature
– Direct computation on an edge image.– Derive the measure of curvature from image
C. Nikou – Image Analysis (T-14)
intensities.– Correlation.
3/22 2
( ) ( ) ( ) ( )( )( ) ( )
x t y t y t x ttx t y t
κ −=
⎡ ⎤+⎣ ⎦

4
19 Image Curvature (cont.)
• Direct computation from edges.– Difference in edge direction.
( ) ( 1) ( 1)t t tκ ϕ ϕ= + − −
C. Nikou – Image Analysis (T-14)
• Connected edges are needed (hysteresis).
with1 ( 1) ( 1)( ) tan
( 1) ( 1)y t y ttx t x t
ϕ − ⎛ ⎞+ − −= ⎜ ⎟+ − −⎝ ⎠
20 Image Curvature (cont.)
• Direct computation from edges.– Smoothing is generally required by considering more
than two pixels:
1( ) ( 1 ) ( 1)n
i i∑
C. Nikou – Image Analysis (T-14)
1( ) ( 1 ) ( 1)
it t i t i
nκ ϕ ϕ
=
= + + − + −∑– Not very reliable results.
– Reformulation of a first order edge detection scheme.
– Quantization errors in angle measurement.– Threshold to detect corners.
21 Image Curvature (cont.)
• Direct computation from edges.
C. Nikou – Image Analysis (T-14)
Object silhouette Thresholded curvature
• The result depends strongly on the threshold.
22 Image Curvature (cont.)
• Computation from image intensity.– It should be computed along the curve (normal to the
image gradient) for each pixel.– Cartesian coordinates for the angle of the tangent φ(x,y).
C. Nikou – Image Analysis (T-14)
– Measure of angular changes in the image with respect to location φ’(x,y).
– The curve at an image point may be approximated by:
( )( )
( ) cos ( , )
( ) sin ( , )
x t x t x y
y t y t x y
ϕ
ϕ
′= +
′= +
23 Image Curvature (cont.)
• Computation from image intensity.– The curvature is given by:
( , ) ( , ) ( ) ( , ) ( )( , ) x y x y x t x y y tx yt x t y tϕ
ϕ ϕ ϕκ ′
′ ′ ′∂ ∂ ∂ ∂ ∂= = +
∂ ∂ ∂ ∂ ∂
C. Nikou – Image Analysis (T-14)
t x t y t∂ ∂ ∂ ∂ ∂with
( ) ( )
1
( ) ( )cos ( , ) , sin ( , ) ,
( , ) tan x
y
x t y tx y x yt t
Mx yM
ϕ ϕ
ϕ −
∂ ∂′ ′= =∂ ∂
⎛ ⎞′ = −⎜ ⎟⎜ ⎟
⎝ ⎠
Normal to the curve. Recall that this is associated with the Css(t).
24 Image Curvature (cont.)
• Computation from image intensity.– Substituting the all the terms:
( )2 2
3/22 2
1( , ) y yx xy x y x x y
x y
M MM Mx y M M M M M Mx x y yM M
ϕκ ′
∂ ∂⎧ ⎫∂ ∂= − + −⎨ ⎬∂ ∂ ∂ ∂⎩ ⎭+
C. Nikou – Image Analysis (T-14)
( )x y
– Alternatively, by differentiating backwards:
( )2 2
3/22 2
1( , ) y yx xy x y x x y
x y
M MM Mx y M M M M M Mx x y yM M
ϕκ ′−
∂ ∂⎧ ⎫∂ ∂= − − +⎨ ⎬∂ ∂ ∂ ∂⎩ ⎭+

5
25 Image Curvature (cont.)
• Computation from image intensity.– Other measures differentiate along the normal to the
curve.– The idea is that curves may be thicker than one pixel
id
C. Nikou – Image Analysis (T-14)
wide.– Differentiating along the normal measures the difference
between internal and external gradient angles.– Theoretically, these are equal. However, in practice they
differ due to image discretization.– The more the edge is bent, the larger the difference
(Kass et al. IJCV 1988).
26 Image Curvature (cont.)
• Computation from image intensity.– The measures are:
( )2
3/22 2
1( , ) y y y xx x y x y x y
x y
M M M Mx y M M M M M M Mx x y yM M
ϕκ ′⊥
∂ ∂ ∂⎧ ⎫∂= − − +⎨ ⎬∂ ∂ ∂ ∂⎩ ⎭+
C. Nikou – Image Analysis (T-14)
( )x y
( )2 2
3/22 2
1( , ) y yx xx x y x y y
x y
M MM Mx y M M M M M Mx x y yM M
ϕκ ′−⊥
∂ ∂⎧ ⎫∂ ∂= − + − +⎨ ⎬∂ ∂ ∂ ∂⎩ ⎭+
27 Image Curvature (cont.)• Computation from image intensity.
ϕκ ′ ϕκ ′−
C. Nikou – Image Analysis (T-14)
Better than direct computation but the results are not consistent.
ϕκ ′⊥ ϕκ ′−⊥
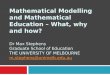
28Finding Corners – Image Curvature
by Correlation
C. Nikou – Image Analysis (T-14)
• Key property: in the region around a corner, image gradient has two or more dominant directions.
• Corners are repeatable and distinctive.
C.Harris and M.Stephens. "A Combined Corner and Edge Detector.“Proceedings of the 4th Alvey Vision Conference: pages 147--151.
29
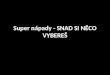
• We should easily recognize the point by looking through a small window.
• Shifting a window in any direction should give a large change in intensity.
The Basic Idea
C. Nikou – Image Analysis (T-14)
“edge”:no change along the edge direction
“corner”:significant change in all directions
“flat” region:no change in all directions
Source: A. Efros
30 Harris Corner Detector
[ ]2
,( , ) ( , ) ( , ) ( , )
x yE u v w x y I x u y v I x y= + + −∑
Change in appearance for the shift [u,v]:
h f dd
C. Nikou – Image Analysis (T-14)
IntensityShifted intensity
Window function
orWindow function w(x,y)
Gaussian1 in window, 0 outside
Source: R. Szeliski

6
31 Harris Detector (cont.)
[ ]2
,
( , ) ( , ) ( , ) ( , )x y
E u v w x y I x u y v I x y= + + −∑
Change in appearance for the displacement [u,v]:
C. Nikou – Image Analysis (T-14)
Second-order Taylor expansion of E(u,v) around (0,0):
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡+≈
vu
EEEE
vuEE
vuEvuEvvuv
uvuu
v
u
)0,0()0,0()0,0()0,0(
][21
)0,0()0,0(
][)0,0(),(
32 Harris Detector (cont.)The bilinear approximation simplifies to
where M is a 2×2 matrix computed from image derivatives:
⎥⎦
⎤⎢⎣
⎡≈
vu
MvuvuE ][),(
C. Nikou – Image Analysis (T-14)
2
2,
( , ) x x y
x y x y y
I I IM w x y
I I I⎡ ⎤
= ⎢ ⎥⎢ ⎥⎣ ⎦
∑
where M is a 2×2 matrix computed from image derivatives:
M
33
The surface E(u,v) is locally approximated by a quadratic form. Let’s try to understand its shape.
Harris Detector (cont.)
⎥⎤
⎢⎡
≈u
MvuvuE ][),(
C. Nikou – Image Analysis (T-14)
⎥⎦
⎢⎣v
MvuvuE ][),(
⎥⎥⎦
⎤
⎢⎢⎣
⎡=∑ 2
2
yyx
yxx
IIIIII
M
34
⎥⎤
⎢⎡
⎥⎤
⎢⎡
∑ 12 0λyxx III
M
First, consider the axis-aligned case where gradients are either horizontal or vertical.
Harris Detector (cont.)
C. Nikou – Image Analysis (T-14)
⎥⎦
⎢⎣
=⎥⎥⎦⎢
⎢⎣
=∑2
12 0 λyyx
yxx
IIIM
If either λ is close to 0, then this is not a corner, so look for locations where both are large.
35 Harris Detector (cont.)
Since M is symmetric, it can be written as: RRM ⎥⎦
⎤⎢⎣
⎡= −
2
11
00λ
λ
We can visualize M as an ellipse with axes lengths determined by the eigenvalues and orientation determined by the rotation matrix R
C. Nikou – Image Analysis (T-14)
by the rotation matrix R.
direction of the slowest change
direction of the fastest change
(λmax)-1/2
(λmin)-1/2const][ =⎥
⎦
⎤⎢⎣
⎡vu
Mvu
Ellipse equation:
36Visualization of second moment
matrices
C. Nikou – Image Analysis (T-14)

7
37Visualization of second moment
matrices (cont.)
C. Nikou – Image Analysis (T-14)
38 Window size matters!
C. Nikou – Image Analysis (T-14)
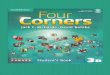
39 Interpreting the eigenvalues
λ2
“Corner”λ1 and λ2 are large,λ λ
“Edge” λ2 >> λ1
Classification of image points using eigenvalues of M :
C. Nikou – Image Analysis (T-14)λ1
λ1 ~ λ2;E increases in all directions
λ1 and λ2 are small;E is almost constant in all directions
“Edge” λ1 >> λ2
“Flat” region
40 Corner response function
“Corner”R > 0
“Edge” R < 0
22121
2 )()(trace)det( λλαλλα +−=−= MMR
α: constant (0.04 to 0.06)
C. Nikou – Image Analysis (T-14)
“Edge” R < 0
“Flat” region
|R| small
41 Harris detector: Steps
1. Compute Gaussian derivatives at each pixel.
2. Compute second moment matrix M in a Gaussian window around each pixel.
C. Nikou – Image Analysis (T-14)
3. Compute corner response function R.4. Threshold R.5. Find local maxima of response function
(nonmaximum suppression).
42 Harris Detector: Steps (cont.)
C. Nikou – Image Analysis (T-14)

8
43 Harris Detector: Steps (cont.)
Compute corner response R
C. Nikou – Image Analysis (T-14)
44 Harris Detector: Steps (cont.)
Find points with large corner response: R>threshold
C. Nikou – Image Analysis (T-14)
45 Harris Detector: Steps (cont.)
Take only the points of local maxima of R
C. Nikou – Image Analysis (T-14)
46 Harris Detector: Steps (cont.)
C. Nikou – Image Analysis (T-14)
47 Invariance
Features should be detected despite geometric or photometric changes in the image: if we have two transformed versions of the same image, features should be detected in corresponding locations.
C. Nikou – Image Analysis (T-14)
48 Models of Image Transformation
• Geometric– Rotation
– Scale
C. Nikou – Image Analysis (T-14)
– Affinevalid for: orthographic camera, locally planar object
• Photometric– Affine intensity change (I → a I + b)

9
49Harris Detector: Invariance
Properties• Rotation
C. Nikou – Image Analysis (T-14)
The ellipse rotates but its shape (i.e. eigenvalues) remains the same.
Corner response R is invariant to image rotation
50Harris Detector: Invariance
Properties (cont.)• Affine intensity change
• Only derivatives are used => invariance to intensity shift I → I + b• Intensity scale: I → a I
C. Nikou – Image Analysis (T-14)
R
x (image coordinate)
threshold
R
x (image coordinate)
Partially invariant to affine intensity change
51Harris Detector: Invariance
Properties (cont.)• Scaling
C. Nikou – Image Analysis (T-14)
All points will be classified as edges
Corner
Not invariant to scaling
52Harris Detector: Invariance
Properties (cont.)• Harris corners are not invariant to scaling.• This is due to the Gaussian derivatives
computed at a specific scale.• If the image differs in scale the corners
C. Nikou – Image Analysis (T-14)
• If the image differs in scale the corners will be different.
• For scale invariance, it is necessary to detect features that can be reliably extracted under scale changes.
53 Scale-invariant feature detection
• Goal: independently detect corresponding regions in scaled versions of the same image.
• Need scale selection mechanism for finding characteristic region size that is covariant with the image transformation
C. Nikou – Image Analysis (T-14)
the image transformation.• Idea: Given a key point in two images
determine if the surrounding neighborhoods contain the same structure up to scale.
• We could do this by sampling each image at a range of scales and perform comparisons at each pixel to find a match but it is impractical.
54Scale-invariant feature detection
(cont.)• Evaluate a signature function and plot the
result as a function of the scale.– The shape should be similar in different scales.
C. Nikou – Image Analysis (T-14)

10
55Scale-invariant feature detection
(cont.)• The only operator fulfilling these requirements
is a scale-normalized Gaussian.
C. Nikou – Image Analysis (T-14)
T. Lindeberg. Scale space theory: a basic tool for analyzing structures at different scales. Journal of Applied Statistics, 21(2), pp. 224—270, 1994.
56Scale-invariant feature detection
(cont.)• Based on the above idea, Lindeberg (1998)
proposed a detector for blob-like features that searches for scale space extrema of a scale-normalized LoG.
C. Nikou – Image Analysis (T-14)
T. Lindeberg. Feature detection with automatic scale selection.International Journal of Computer Vision, 21(2), pp. 224—270, 1998.
57Scale-invariant feature detection
(cont.)
C. Nikou – Image Analysis (T-14)
58
f
d
Edge
Derivative
Recall: Edge Detection
C. Nikou – Image Analysis (T-14)
gdxdf ∗
gdxd
Source: S. Seitz
Derivativeof Gaussian
Edge = maximumof derivative
59 Recall: Edge Detection (cont.)
f Edge
Second derivative
C. Nikou – Image Analysis (T-14)
gdxdf 2
2
∗
gdxd
2
2 Second derivativeof Gaussian (Laplacian)
Edge = zero crossingof second derivative
Source: S. Seitz
60 From edges to blobs
• Edge = ripple.• Blob = superposition of two edges (two ripples).
C. Nikou – Image Analysis (T-14)
Spatial selection: the magnitude of the Laplacian response will achieve a maximum at the center of the blob, provided the scale of the Laplacian is “matched” to the scale of the blob.
maximum

11
61 Scale selection• We want to find the characteristic scale of the blob by
convolving it with Laplacians at several scales and looking for the maximum response.
• However, Laplacian response decays as scale increases:
C. Nikou – Image Analysis (T-14)
Why does this happen?
increasing σoriginal signal(radius=8)
62 Scale normalization
• The response of a derivative of Gaussian filter to a perfect step edge decreases as σincreases.
πσ 21
C. Nikou – Image Analysis (T-14)
63 Scale normalization (cont.)
• The response of a derivative of Gaussian filter to a perfect step edge decreases as σincreases.
• To keep the response the same (scale-
C. Nikou – Image Analysis (T-14)
invariant), we must multiply the Gaussian derivative by σ.
• The Laplacian is the second derivative of the Gaussian, so it must be multiplied by σ2.
64 Effect of scale normalizationUnnormalized Laplacian responseOriginal signal
C. Nikou – Image Analysis (T-14)
Scale-normalized Laplacian response
maximum
65 Blob detection in 2D
• Laplacian: Circularly symmetric operator for blob detection in 2D.
C. Nikou – Image Analysis (T-14)
2
2
2
22
yg
xgg
∂∂
+∂∂
=∇
66 Blob detection in 2D (cont.)
• Laplacian: Circularly symmetric operator for blob detection in 2D.
C. Nikou – Image Analysis (T-14)
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
=∇ 2
2
2
222
norm yg
xgg σScale-normalized:

12
67 Scale selection
• At what scale does the Laplacian achieve a maximum response for a binary circle of radius r?
C. Nikou – Image Analysis (T-14)
r
image Laplacian
68 Scale selection (cont.)
• The 2D LoG is given (up to scale) by
2/
222 2/)(222 )2( σσ yxeyx +−−+
For a binary circle of radius r, the LoG achieves a maximum at
C. Nikou – Image Analysis (T-14)
2/r=σ
r
2/rimage
Lapl
acia
n re
spon
se
scale (σ)
69 Characteristic scale
• We define the characteristic scale as the scale that produces a peak of the LoG response.
C. Nikou – Image Analysis (T-14)
characteristic scaleT. Lindeberg (1998). "Feature detection with automatic scale selection."International Journal of Computer Vision, 30 (2): pp 79--116.
70 Scale-space blob detector
1. Convolve the image with scale-normalized LoG at several scales.
2. Find the maxima of squared LoG response in scale-space.
C. Nikou – Image Analysis (T-14)
71 Scale-space blob detector: Example
C. Nikou – Image Analysis (T-14)
72 Scale-space blob detector: Example
C. Nikou – Image Analysis (T-14)

13
73 Scale-space blob detector: Example
C. Nikou – Image Analysis (T-14)
74
• Approximating the LoG with a difference of Gaussians:
( )2 ( , , ) ( , , )xx yyL G x y G x yσ σ σ= +(Laplacian)
Efficient implementation
C. Nikou – Image Analysis (T-14)
( , , ) ( , , )DoG G x y k G x yσ σ= −
( p )
(Difference of Gaussians)
• We have studied this topic in edge detection.
75 Efficient implementation
Divide each octave into an equal number K of intervals such that:
1/2 K nk kσ σ= =
C. Nikou – Image Analysis (T-14)
D. G. Lowe. "Distinctive image features from scale-invariant keypoints.”International Journal of Computer Vision 60 (2), pp. 91-110, 2004.
02 ,1,..., .
nk kn K
σ σ= ==
Implementation by a Gaussian pyramid.
76 The Harris-Laplace detector
• It combines the Harris operator for corner-like structures with the scale space selection mechanism of DoG.
• Two scale spaces are built: one for the Harris corners and one for the blob detector (DoG)
C. Nikou – Image Analysis (T-14)
corners and one for the blob detector (DoG).• A key point is a Harris corner with a
simultaneously maximun DoG at the same scale.• It provides fewer key points with respect to DoG
due to the constraint.
K. Mikolajczyk and C. Schmid, Scale and Affine invariant interest point detectors, International Journal of Computer Vision, 60(1):63-86, 2004.
77From scale invariance to affine
invariance
C. Nikou – Image Analysis (T-14)
• For many problems, it is important to find features that are invariant under large viewpoint changes.
• The projective distortion may not be corrected locally due to the small number of pixels.
• A local affine approximation is usually sufficient.
78From scale invariance to affine
invariance (cont.)
C. Nikou – Image Analysis (T-14)
• Affine adaptation of scale invariant detectors.• Find local regions where an ellipse can be reliably
and repeatedly extracted purely from local image properties.

14
79
•Recall: RRIIIIII
yxwMyyx
yxx
yx⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡= −∑
2
112
2
, 00
),(λ
λ
We can visualize M as an ellipse with axis lengths determined by the eigenvalues and orientation determined by R.
Affine Adaptation
C. Nikou – Image Analysis (T-14)
direction of the slowest
change
direction of the fastest change
(λmax)-1/2
(λmin)-1/2
by the eigenvalues and orientation determined by R.
const][ =⎥⎦
⎤⎢⎣
⎡vu
Mvu
Ellipse equation:
80 Affine adaptation example
C. Nikou – Image Analysis (T-14)
Scale-invariant regions (blobs)
81 Affine adaptation example
C. Nikou – Image Analysis (T-14)
Affine-adapted blobs
82 Affine adaptation
• The “covarying” of Harris corner detector ellipse may be viewed as the “characteristic shape” of a region.
• We can normalize the region by transforming the ellipse into a unit circle
C. Nikou – Image Analysis (T-14)
ellipse into a unit circle.
• The normalized regions may be detected under any affine transformation.
83 Affine adaptation (cont.)
• Problem: the second moment “window” determined by weights w(x,y) must match the characteristic shape of the region.
• Solution: iterative approach– Use a circular window to compute the second moment matrix.
C. Nikou – Image Analysis (T-14)
– Based on the eigenvalues, perform affine adaptation to find an ellipse-shaped window.
– Recompute second moment matrix in the ellipse and iterate.
84 Iterative affine adaptation
C. Nikou – Image Analysis (T-14)
K. Mikolajczyk and C. Schmid, Scale and Affine invariant interest point detectors, International Journal of Computer Vision, 60(1):63-86, 2004.
http://www.robots.ox.ac.uk/~vgg/research/affine/

15
85 Orientation ambiguity
• There is no unique transformation from an ellipse to a unit circle
– We can rotate or flip a unit circle, and it still stays a unit circle.
C. Nikou – Image Analysis (T-14)
86 Orientation ambiguity (cont.)
• We have to assign a unique orientation to the keypoints in the circle:
– Create the histogram of local gradient directions in the patch.
– Assign tho the patch the orientation of the peak of the
C. Nikou – Image Analysis (T-14)
g p psmoothed histogram.
0 2 π
87 Summary: Feature extraction
Extract affine regions Normalize regionsEliminate rotational
ambiguityCompute appearance
descriptors
C. Nikou – Image Analysis (T-14)
SIFT (Lowe ’04)
88 Invariance vs. covariance
• Invariance: features(transform(image)) = features(image)
• Covariance: features(transform(image)) = transform(features(image))
C. Nikou – Image Analysis (T-14)
Covariant detection => invariant description