Embed Size (px)
Citation preview

COST 723 Training School - Cargese 4 - 14 October 2005
OBS 2Radiative transfer for thermal radiation.
Observations
Bruno Carli

COST 723 Training School - Cargese 4 - 14 October 2005
Table of Contents• Geometry of observation: zenith, nadir and limb sounding.
• Thermal radiation and types of measurements.
• Spectroscopy.
• The forward model for thermal radiation.
• The inverse problem of atmospheric constituent retrieval.
• Definition of variance-covariance matrix and of averaging kernel matrix.

COST 723 Training School - Cargese 4 - 14 October 2005
Geometry of observation
• Zenith sounding
• Nadir sounding
• Limb sounding

COST 723 Training School - Cargese 4 - 14 October 2005
Geometry of observationLimb sounding

COST 723 Training School - Cargese 4 - 14 October 2005
The vertical and horizontal resolution depend on the geometry of observation.
Typical resolution of nadir measurements is 10 km horizontal and 10 km vertical. Typical resolution of limb measurement is 2 km vertical and 700 km horizontal.
Geometry of observation

COST 723 Training School - Cargese 4 - 14 October 2005
Thermal radiation
Thermal radiation
JsTBIs
dx
dI )(
Sun/StarMoon
Earth/planet Atmosphere
SunEarth/atmosphere
COST 723 Training School - Cargese 4 - 14 October 2005
Thermal radiation
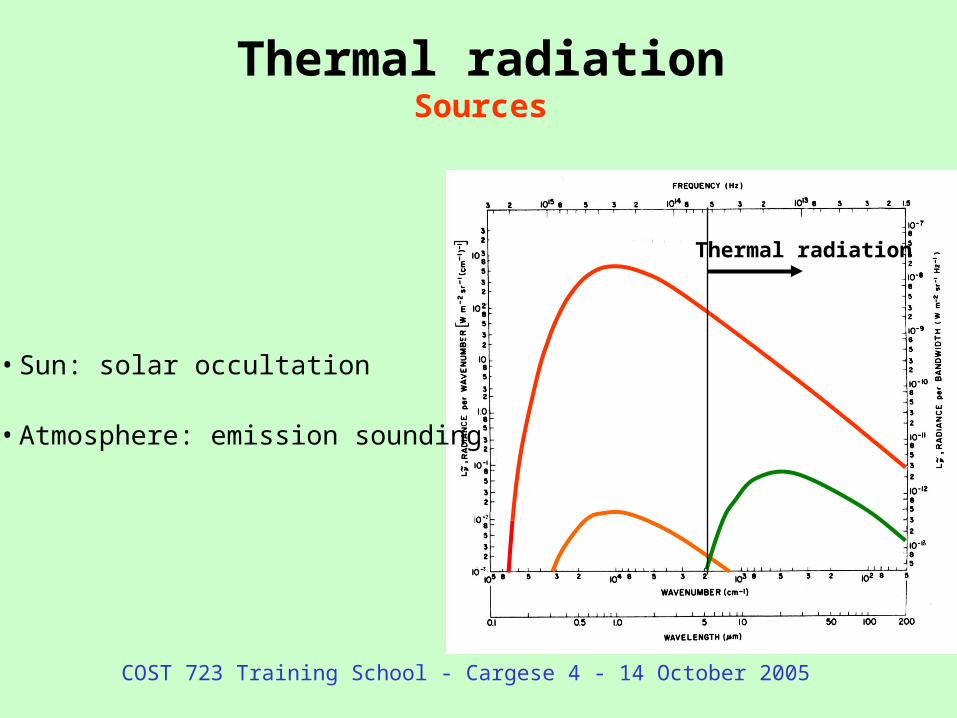
Thermal radiationSources
• Sun: solar occultation
• Atmosphere: emission sounding
COST 723 Training School - Cargese 4 - 14 October 2005
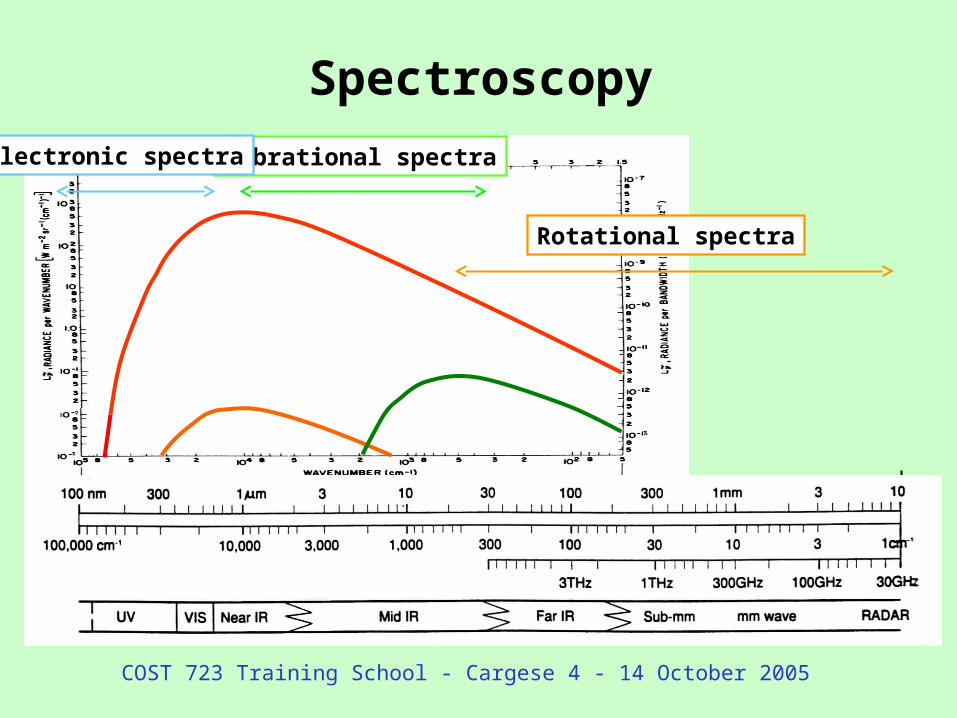
Spectroscopy
Rotational spectra
Vibrational spectraElectronic spectra

COST 723 Training School - Cargese 4 - 14 October 2005
Spectroscopy
Main spectroscopic constituents for the atmosphere:
• water vapor ()
• ozone ()
• carbon dioxide ()
• methane ()
• nitrous oxide ()
• nitric acid ()
Rotational spectra
Vibrational spectra

COST 723 Training School - Cargese 4 - 14 October 2005
Spectroscopy
Wavenumber cm-1
Alt
itu
de
km
40
10
30
80
100
90
70
60
50
20
40
10
30
80
100
90
70
60
50
20
110100100010000
Temperature broadening:Gaussian line shape
Pressure broadening:Lorentzian line shape
T
P
Voight line shape equal convolution between Gaussian and Lorentzian distributions.

COST 723 Training School - Cargese 4 - 14 October 2005
Integral equation of Radiative TransferIntegral equation of Radiative Transfer
),0(
0),(),0( )()0()(
L LxL dexTBeILI
Absorption term Emission term
Intensity of the background source
“Transmittance”between 0 and L
Spectral intensity observed at L
“Transmittance”between l and L
“Optical depth” L
xdxxLx ')'(),(
COST 723 Training School - Cargese 4 - 14 October 2005
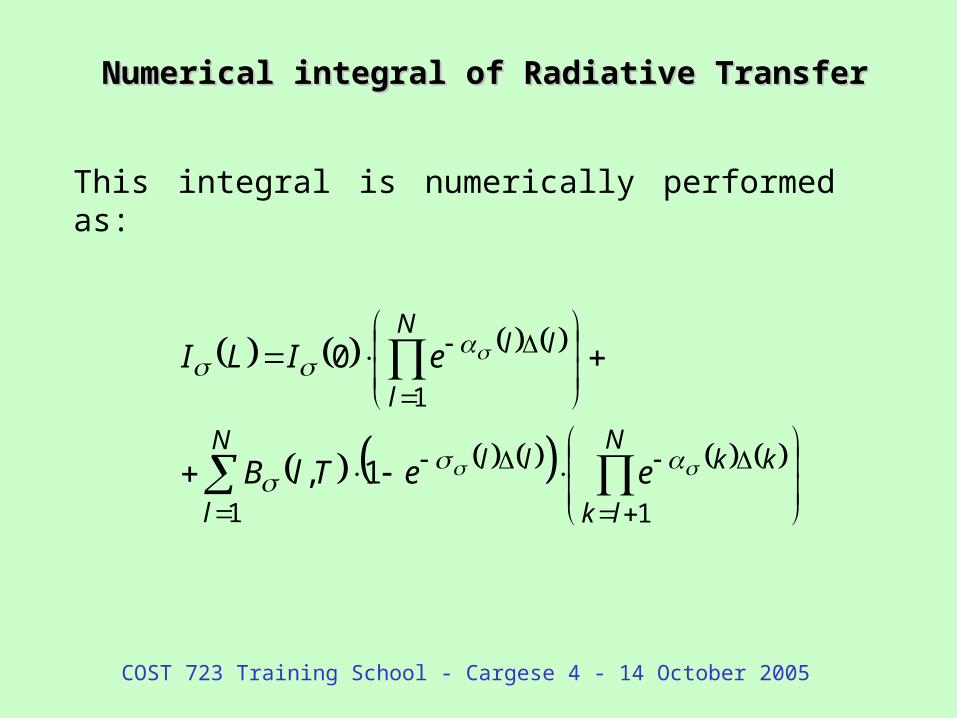
Numerical integral of Radiative TransferNumerical integral of Radiative Transfer
N
l
N
lk
kkll
N
l
ll
eeTlB
eILI
1 1
1
1,
0
This integral is numerically performed as:

COST 723 Training School - Cargese 4 - 14 October 2005
Tree of operations for Radiative Transfer calculationTree of operations for Radiative Transfer calculationsegmentationsegmentation
Spectral intensity observed at L
N
l
N
lk
kkllN
l
ll eeTlBeILI1 11
1,0
The optical path is divided in a set of contiguous segments in which the path is straight and the atmosphere has constant properties (segmentation).
In each segment the absorption coefficient is also calculated.
Segments of the optical path 1 ll xxl
COST 723 Training School - Cargese 4 - 14 October 2005
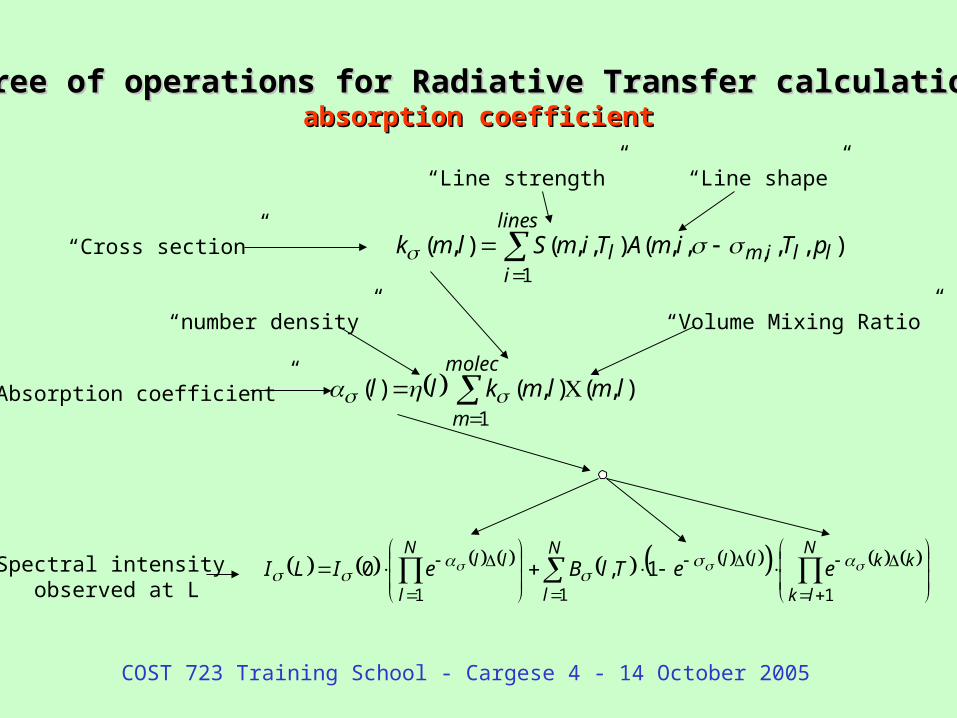
Tree of operations for Radiative Transfer calculationTree of operations for Radiative Transfer calculationabsorption coefficientabsorption coefficient
Spectral intensity observed at L
“Absorption coefficient”
molec
m
lmlmkll1
),(),()(
“number density”
“Cross section”
“Volume Mixing Ratio”
lines
illiml pTimATimSlmk
1, ),,,,(),,(),(
“Line shape”“Line strength”
N
l
N
lk
kkllN
l
ll eeTlBeILI1 11
1,0

COST 723 Training School - Cargese 4 - 14 October 2005
The forward model calculates the spectrum measured by the
instrument.
This is equal to the atmospheric spectral intensity I, (L), obtained
with the radiative transfer model, convoluted with instrument effects.
LIIL ,,
Forward Model of the measurementsForward Model of the measurements
Where AILS is the “apodized instrument line shape” and FOV is the
“field of view “ of the instrument.
'''',, dFOVdAILSIS LL
COST 723 Training School - Cargese 4 - 14 October 2005
The inversion problem
Forward model
Inverse model

COST 723 Training School - Cargese 4 - 14 October 2005
The forward and the inverse problem
The measured signal is determined for several values of the frequency and of the limb angle :
S( , ) ,
and depends on the properties of the atmosphere that, in the
case of a stratified atmosphere, are only a function of the
altitude z :
S( , ) = F(p(z), T(z), VMRi(z) )
where p(z) is the pressure, T(z) is the temperature and
VMRi(z) is the volume mixing ratio of the atmospheric
species i.

COST 723 Training School - Cargese 4 - 14 October 2005
The forward and the inverse problem
In our case, the relationship :
S( , ) = F(p(z), T(z), VMRi(z))
is the forward problem and its reciprocal
p(z) = F1(S( , ))
T(z) = F2(S( , ))
VMRi(z) = Fi(S( , ))
is the inverse problem.

COST 723 Training School - Cargese 4 - 14 October 2005
The forward and the inverse problem
The inverse problem does not always have a useful solution.
In particular it can be :
• ill posed (either impossible solution or infinite possible solutions). This occurs when either an error is made in the definition of the problem or the observations do not provide the required information.
• ill conditioned (the solution exists but small errors in the observations lead to large errors in the solution). This occurs when the observations contains insufficient information.

COST 723 Training School - Cargese 4 - 14 October 2005
The inversion problem
Ill conditioned
Ill posed
?

COST 723 Training School - Cargese 4 - 14 October 2005
The mathematics of the retrievalThe inversion
In the forward problem
S(, ) = F(p,T,VMR)
(, )=m are the observation variables that number the observations and (p,T,VMR)=q are the atmospheric variables that become the unknowns in the inverse problem. Using these notations :
Sm = F(q)
In general, this equation cannot be analytically inverted and does not have an exact solution.

COST 723 Training School - Cargese 4 - 14 October 2005
The mathematics of the retrievalThe least-squares solution
We can look for a least-squares solution. The least-square solution qr is the value of q which minimises the quantity:
2 = yT (Vy)-1 y where Vy is the variance covariance matrix of the measurements and
y = Sm-F(q)
is the difference between the measurements and the forward model calculated for q.

COST 723 Training School - Cargese 4 - 14 October 2005
The mathematics of the retrievalThe Gauss-Newton method
The least-square solution is the solution of equation:
(2)/ q = 0.
This equation can be solved with an iterative procedure that starts from an initial guess qo of the unknown.The Gauss-Newton method assumes that qo is near enough to the solution qr and adopts a linear expansion of the non linear functions.

COST 723 Training School - Cargese 4 - 14 October 2005
The mathematics of the retrievalThe Gauss-Newton solution
At each step of the iterative process a new estimate qn is obtained : qn = qn-1+(KT (Vy)-1 K)-1 KT (Vy)-1 (Sm-F(qn-1))
where the quantity K=(F(q))/(q) is the Jacobian of the measurements.
When the convergence criteria are satisfied the iterative process is stopped and qr=qn ..
The variance covariance matrix of the solution is equal to:
Vq = (KT (Vy)-1 K)-1

COST 723 Training School - Cargese 4 - 14 October 2005
The mathematics of the retrievalThe Levenberg - Marquardt Method
The iterative process may be unstable (the values retrieved at
each iteration oscillate around the solution).
In order to limit this effect it is useful to introduce a damping in
the variation of the unknown (Lavenberg - Marquardt method).
In this case the solution is equal to:
qr = (KT (Vy)-1 K + I)-1 KT (Vy)-1 (Sm-F(qn-1))
where I is the unit matrix.

COST 723 Training School - Cargese 4 - 14 October 2005
In the ideal case of absence of both random and systematic errors in the measurements and in the instrument’s forward model, for each state of the atmosphere the observing system provides a retrieved profile .
Expanding up to the first order about a generic atmospheric state , we obtain:
The quantity:
is called averaging kernel (AK) matrix and it is a function of the state .
Averaging kernels
0x
0 xxx
xxx
0
ˆˆˆ v
vv
x
vx̂
0
ˆ
xx
xA
v
0xvx̂
0x

COST 723 Training School - Cargese 4 - 14 October 2005
Averaging kernels
The AK matrix describes how the real state of the atmosphere is distorted by the retrieval process.
This information is important whenever the retrieved quantities are used together with other measurements (data assimilation, data validation).

COST 723 Training School - Cargese 4 - 14 October 2005
Averaging kernels
The AKs are the
rows of the AK
matrix and provide
for each retrieved
value the
contribution of the
atmosphere at the
different altitudes.

COST 723 Training School - Cargese 4 - 14 October 2005
20
40
60
80
-0.2 0.0 0.2 0.4 0.6
Averaging Kernel
Alti
tud
e [k
m]
Averaging kernelsvariabilityvariability
Ozone, all latitudes (April only)

COST 723 Training School - Cargese 4 - 14 October 2005
Final considerations
The inversion problem is characterised by:
• the number of observations
• the number of unknowns
• the VCM of the observations
• the VCM of the retrieved unknowns
• the averaging kernel of the retrieval.