Embed Size (px)
DESCRIPTION
Geir Nævdal and Brice Vallès. Coupled EnKF. Outline. Motivation Background: Alternative implementation Examples Simple 1-D linear model PUNQS3 Further work. Coupled EnKF – motivation. Lorentzen et. al., 2005, SPE96375 Problem with consistency between repeated runs - PowerPoint PPT Presentation
Citation preview

Coupled EnKF
Geir Nævdal and Brice Vallès

Outline• Motivation• Background: Alternative
implementation• Examples
– Simple 1-D linear model– PUNQS3
• Further work

Coupled EnKF – motivation
• Lorentzen et. al., 2005, SPE96375– Problem with consistency between repeated runs
• Thulin et. al., in preparation, previous talk + ECMOR XI– Set of independent EnKFs to estimate Monte-Carlo
uncertainty
• Anderson, Physica D, vol. 230, 2007– “Hierarchical ensemble filter” to calculate localization– Use several independent EnKF, calculate a reduction in
Kalman gain based on statistics

Reminder: SPE96375• 10 initial ensembles
– Generated with same distribution
• Kolmogorov-Smirnov test on posterior distributions– Posterior distributions are not coming from same distribution
Example: FOPT

Hierarchical ensemble filter (by Anderson)• Split the ensemble in several sub-ensembles• Run each sub-ensemble using different Kalman gain
matrices• Modify each of the Kalman gain matrices
– multiplied with factor

Localization by Hierarchical EnKF – simple 1-D example• Initial guess:
– Zero mean– Gaussian variogram– Correlation length: 5– Standard deviation: 1
• Measurement: y=2 at x=26– Measurement uncertainty:
2
• Kalman filter gives updated mean (and covariance)

Localization by Hierarchical EnKF – simple 1-D example• Initial guess:
– Zero mean– Gaussian variogram– Correlation length: 5– Standard deviation: 1
• Measurement: y=2 at x=26– Measurement uncertainty:
2
• Kalman filter gives updated mean (and covariance)
• Compare– EnKF with 100 ens.
members– Hierarchical ensemble filter
with 5x20 members

Localization by Hierarchical ensemble filter – simple example (40 runs)
True True EnKF
Hierarchical
Results from 40 runs (ens. mean) Average of 40 runs

Localization by Hierarchical ensemble filter – simple example (40 runs)
True True EnKF
Hierarchical
Results from 40 runs (ens. mean) Standard deviation of mean of 40 runs

PUNQS3• The PUNQ-S3 is a small-size
synthetic 3-D reservoir engineering model.
• The reservoir consists of 19 x 28 x5 gridblocks, where 1761 are active.
• Equal 180 meter sides in x- and y-directions.
• Reservoir is bounded by a fault in east and south.
• Reservoir is bounded by an aquifer in west and north.
• New webpage: http://www3.imperial.ac.uk/earthscienceandengineering/research/perm/punq-s3model

PUNQS3 – production history and forecasting
• First 8 years: history matching phase. – 1 year of well testing, – 3 year shut-in period, and – 4 years of production.
• Next 8.5 years: forecasting phase. • During history matching phase:
– wells are controlled by using history target rates for oil.• During forecasting phase:
– wells are controlled using target oil rate of 150 scm/day.– Minimum bottom hole pressure of 120 bar. – If gas/oil ratio is greater than 200, a cutback factor of
0.75 is used.

Investigation
• Initial ensemble generated based on description on old PUNQS3 webpage
• Permeability and porosity are estimated• Comparing result of forecasts• Ordinary EnKF versus hierarchical ensemble filter
(200 members vs. 5 x 40 members)• Arguing for 40 members in each batch:
– For PUNQS3 Gu & Oliver found reasonable history match with 40 members
– For field case, Bianco et. al. found reasonable history match with 50 members

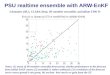
Comparison: Ordinary EnKF compared to 5x40 members with hierarchical ensemble filter – Forecasted FOPT• 10 initial ensembles
used in both cases • Compare forecasted
FOPT from final estimates
• Figure shows maximum, mean, and minimum of cdfs for FOPT
• There is generally less deviation in the results from hierarchical ensemble filter EnKF Hierarchical

Comparison: Ordinary EnKF compared to 5x40 members with hierarchical ensemble filter – Forecasted FOPT
EnKF Hierarchical

Quality of the solutions: History matching• Evaluate the estimated
fields by rerunning from time zero
• 117 measurements• Objective function:
EnKF Hierarchical

Quality of solutions: Estimated porosity• Compare quality of
solutions with following measure:
• Hierarchical more robust
EnKF Hierarchical

Quality of solutions: Estimated log-perm
EnKF Hierarchical
Log-permZLog-permX

Quality of solutions: Estimated dynamic quantities
EnKF Hierarchical
PressureGas-oil ratio

Quality of solutions: Estimated saturations
EnKF Hierarchical
Water saturationGas saturation

Comparison of mean of final estimates – the concept:
True True EnKF
Hierarchical
Results from 40 runs (ens. mean) Standard deviation of mean of 40 runs

Comparison of std. deviation of the mean estimate for the 10 runs: Porosity layer 1 – final time
Hierarchical filter Ordinary EnKF

Porosity layer 5 – 10 runs – final time
Hierarchical filter Ordinary EnKF

Log-Permx - layer 1 – final time
Hierarchical filter Ordinary EnKF

Water saturation - layer 2 – final time
Hierarchical filter Ordinary EnKF

Gas saturation - layer 3 – final time
Hierarchical filter Ordinary EnKF

Pressure - layer 2 – final time
Hierarchical filter Ordinary EnKF

Conclusion of PUNQS3 study
• Slightly better history matches with EnKF compared to hierarchical ensemble filter
• Hierarchical ensemble filter seems to be more robust and have less variations in repeated runs
• Computation time is of same order for the two approaches
• PUNQS3 forecasts do not differ to much

Conclusions & suggestions for further work• Hierarchical ensemble filter
– Gives the opportunity to estimate Monte-Carlo uncertainty
– Seems to be more robust– Have computation time as ordinary EnKF
• Other approaches for localization could be evaluated– Datta-Gupta and coworkers based on streamlines– Approaches based on Schur product– …
• Evaluate hierarchical ensemble filter on more challenging examples
• Evaluate different partitions than 5 x 40 members

Acknowledgment
• This work has been done with financial support from Research Council of Norway (PETROMAKS) and industrial partners
• Licenses for Eclipse have been provided by Schlumberger