Embed Size (px)
Citation preview

P O S I V A O Y
Olk i luo to
F I -27160 EURAJOKI , F INLAND
Te l +358-2-8372 31
Fax +358-2-8372 3709
Arto Korp i sa lo , Ta rmo Jok inen
N iko laev Popov , A lexander Shuva l -Sergeev ,
T imur Zh ienbaev
Eero He ikk inen , Jo rma Nummela
November 2008
Work ing Repor t 2008 -79
Review of Crosshole Radiowave Imaging (FARA)in Drillhole Sections OL-KR4 – OL-KR10 and
OL-KR10 – OL-KR2 in Olkiluoto, 2005

November 2008
Working Reports contain information on work in progress
or pending completion.
The conclusions and viewpoints presented in the report
are those of author(s) and do not necessarily
coincide with those of Posiva.
Arto Korp isa lo , Tarmo Jok inen
Geo log ica l Su rvey o f F in l and
Niko laev Popov , A lexander Shuva l -Sergeev ,
T imur Zh ienbaev
FGUNPP (Geo logorazvedka )
Eero He ikk inen , Jorma Nummela
Pöyry Env i ronment Oy
Work ing Report 2008 -79
Review of Crosshole Radiowave Imaging (FARA)in Drillhole Sections OL-KR4 – OL-KR10 and
OL-KR10 – OL-KR2 in Olkiluoto, 2005
Review of Crosshole Radiowave Imaging (FARA) in Drillhole Sections OL-KR4 – OL-KR10 and OL-KR10 – OL-KR2 in Olkiluoto, 2005
ABSTRACT Posiva Oy carries out research and development of spent nuclear fuel disposal in Finland. The repository will be constructed deep in the crystalline bedrock in Olkiluoto island in Eurajoki. Construction of underground characterization facility ONKALO started 2004.
Posiva Oy and ANDRA, France have co-operated in reviewing the methods for granitic i.e. crystalline bedrock characterization methods. One of the considered themes was electromagnetic crosshole survey. This report describes field work, interpretation and review of crosshole radiowave imaging (RIM) using FARA-MCH tool in 2005 between two drillhole panels at 200-600 m depth level. Drillholes are separated 150-400 m. The works were jointly carried out by Geological Survey of Finland and FGUNPP “Geologorazvedka” (Russia).
FARA tool feasibility in characterization of deformation zones and lithological domains was tested. Geological–geophysical characterization of Olkiluoto site has run since 1989, and more than 40 drillholes have been prepared. Background information is abundant for comparisons with, e.g., geophysical logging, electrical and electromagnetic sounding, and seismic imaging and reflection sounding.
Olkiluoto migmatitic bedrock has undergone a polyphasic ductile–brittle deformation. Resistivity in bedrock varies strongly in range of tens to tens of thousands of Ohm.meters.
FARA–MCH electrical dipole receiver and transmitter probes are connected and synchronized with wireline. The cable interference is suppressed with filters. The method operates in inductive field domain and the field measurables are amplitude and phase difference. at four separate frequencies 312.5, 625, 1250 and 2500 kHz. For each transmitter station at 20–70 m spacing a continuous scan of 200–450 m was measured at 0.5 m interval. Field work was finalised within a week successfully despite of strong noise encountered. Phase information was not used due to noise level. Preliminary processing and quality control was finalised on site.
In processing the amplitude signal was cleaned of outliers and normalised by distance and geometry to obtain attenuation (dB/m), and a tomographic reconstruction was carried out to obtain resistivity in 5 x 5 m or 10 x 10 m cell size, using drillhole resistivity as constraint. Detected low and high resistivity zones, and their apparent shapes and orientations, agree well between the two sections and are in fair agreement with geological and other geophysical results. Material properties are different than in seismic tomography from same location, though reflections describe partly the boundaries of domains differing in electrical properties. Same but more detailed information is obtained as in electric and electromagnetic results from ground surface. Crosshole mise á la masse results agree well with FARA results.
Crosshole radiowave imaging is applicable in Olkiluoto for detecting of conductive and resistive domains, rather than unique fractures or zones. For objects of adequate contrast to be observed, minimum thickness is 20–30 m, and length dimension larger. Drillhole

deviation and recorded depth correctness are critical for successful interpretation. The attenuation is associated with conductivity variation (fracturing and sulphide content) whereas the phase difference would supplement with dielectric permittivity (water content, lithology). Magnetic susceptibility is not used in interpretation, but its variation may affect the results.
The field work should be carried out with denser 5–10 m transmitter interval for higher resolution. Receiver spacing 0.5 m is reasonable. Frequencies 312.5 and 625 kHz apply to distances of 300…400 m, and in some cases with 1250 kHz to 150…200 m., Depth section should be adequately long and drillholes close to a common plane. The inversion method and parameters should be carefully selected, and the interpretation developed to apply 2D/3D numerical modeling.
Keywords: Spent nuclear fuel, geological disposal, Olkiluoto, migmatitic gneiss,
ductile deformation, brittle deformation, radiowave imaging, FARA, drillhole
geophysics

Olkiluodon reikien OL-KR4 – OL-KR10 ja OL-KR10 – OL-KR2 välisen radiovarjostusmittauksen (FARA, 2005) tulosten arviointi
TIIVISTELMÄ
Posiva Oy huolehtii käytetyn ydinpolttoaineen loppusijoitukseen liittyvistä tutkimus- ja kehitystehtävistä Suomessa. Loppusijoitustilat rakennetaan syvälle kiteiseen perus-kallioon Olkiluodon saaressa Eurajoella. Maanalaisia ONKALO tutkimustiloja on louhittu 2004 lähtien.
Posiva Oy ja ANDRA (Ranska) ovat yhteistyössä selvittäneet graniittisen (kiteisen) kiven tutkimusmenetelmiä. Yksi käsiteltävistä teemoista on ollut sähkömagneettinen reikien välinen mittaus. Tämä raportti käsittelee 2005 kahdessa reikäleikkauksessa 200-600 m syvyydellä tehtyä FARA -radiovarjostusta, sen tulkintaa ja tulosvertailua. Reikien etäisyys on 150-400 m. Mittauksen tekivät GTK ja venäläinen FGUNPP Geologoradzvedka tarkoituksena testata menetelmän kykyä kuvailla deformaatio-vyöhykkeitä ja kivilajiominaisuuksia. Olkiluodon kallioperää on tutkittu geologisissa ja geofysikaalisissa tutkimuksissa vuodesta 1989, ja alueella on tehty yli 40 syvää kairanreikää, joista on saatavilla tietoa geofysiikan reikämittauksista, sähköisistä ja sähkömagneettista luotauksista, sekä seismisistä tomografia- ja heijastustuloksista vertailua varten. Olkiluodon migmatiittinen kallioperä on käynyt läpi monivaiheisen plastisen ja hauraan deformaation. Kallion sähköinen ominaisvastus vaihtelee voimakkaasti joistakin kymmenistä kymmeniin tuhansiin ohmimetreihin.
FARA-MCH sähköinen dipolilähetin ja -vastaanotin on kytketty toisiinsa ja synkronoitu kaapelin avulla. Signaalin suora kaapeliyhteys vaimennetaan suotimin. Menetelmä toimii sähkömagneettisen kentän induktiivisessa alueessa, ja mittausparametrit ovat kentän amplitudi ja vaihe-ero neljällä eri taajuudella 312.5, 625, 1250 ja 2500 kHz. Jokaiselle 20–70 m välein sijainneelle lähetinasemalle mitattiin jatkuva, 200–450 m pitkä profiili 0.5 m välein. Kenttätyö valmistui viikossa hyvin tuloksin vaikka kohinataso oli voimakas. Vaihetietoa ei voitu käyttää häiriöiden vuoksi. Alustava tuloskäsittely ja laadunvarmennus tehtiin tutkimusalueella.
Prosessoinnissa amplitudisignaalista poistettiin häiriöt ja se normalisoitiin etäisyyden ja geometrian suhteen vaimennukseksi (dB/m). Tomografisena rekonstruktiona tuotettiin ominaisvastus solukokoon 5 x 5 tai 10 x 10 m, käyttäen reikien loggaustuloksia rajoittimena. Todetut matalan ja korkean ominaisvastuksen tilavuudet sopivat geologisiin ja muihin geofysikaalisiin reikätuloksiin. Materiaalitiedot liittyvät eri para-metreihin kuin seismisissä tuloksissa, joissa on ainakin paikoin esillä sähköisesti poikkeavien tilavuuksien rajapintoja. Tieto on vastaavaa mutta tarkempaa kuin maanpinnalta tehdyissä sähköisissä ja sähkömagneettisissä luotauksissa. Lataus-potentiaalimittaukset sopivat FARAn kanssa yhteen.
FARA soveltuu Olkiluodossa reikien väliseen laajojen johtavien ja eristävien tilavuuksien paikantamiseen, kun kontrastit ovat riittävät. Näitä ovat kivilajiyksiköt ja deformaatiovyöhykkeet ennemmin kuin yksittäiset rakoiluvyöhykkeet. Kohteiden paksuusluokka on noin 20–30 m, ja pituussuuntainen jatkuvuus tätä suurempi. Reikien taipumatietojen ja laitteiden syvyystiedon oikeellisuus on kriittinen tulkinnan onnistumiseksi. Vaimennus liittyy johtavuusvaihteluun (rikkonaisuus, sulfidipitoisuus), jota vaihe-ero täydentäisi tiedolla sähköisestä dielektrisyydestä (vesipitoisuus, kivilajit). Magneettista suskeptibiliteettiä ei ole käytetty tulkinnassa, mutta se vaikuttanee tuloksiin.

Kenttätyö tulisi suorittaa melko tiheällä, 5–10 m lähetinvälillä kairanrei’issä erotus-kyvyn parantamiseksi. Vastaanotinasemien tiheys 0.5 m on riittävä. Menetelmä on Olkiluodossa toimiva matalimmilla 312.5 ja 625 kHz taajuuksilla 300…400 m reikä-etäisyydelle, ja joissakin tapauksissa 1250 kHz taajuudella 150…200 m reikä-etäisyydelle. Reikien keskinäisen asennon tulisi olla lähellä tasomaista, ja tutkittavan leikkauksen riittävän syvä etäisyyteen nähden. Inversiomenetelmä ja sen asetukset pitäisi valita huolella, ja tulevaisuudessa kehittää numeerista 2D- tai 3D- mallinnus-menetelmää.
Avainsanat: Käytetty ydinpolttoaine, geologinen loppusijoitus, Olkiluoto, magma-tiittinen gneissi, plastinen deformaatio, hauras deformaatio, radioaaltokuvantaminen, FARA, reikägeofysiikka.
1
TABLE OF CONTENTS ABSTRACT TIIVISTELMÄ PREFACE
1 INTRODUCTION................................................................................................... 5 2 OPERATING PRINCIPLES OF RADIO IMAGING METHOD ................................ 7 3 FARA–MCH FIELD INSTRUMENTATION .......................................................... 15 4 FIELD WORK AND QUALITY CONTROL ........................................................... 17 5 PROCESSING AND INTERPRETATION ............................................................ 27 6 RESULTS ........................................................................................................... 35 6.1 Drillhole panel OL-KR4–OL-KR10 ................................................................. 35 6.2 Drillhole panel OL-KR10 – OL-KR2 ............................................................... 40 7 COMPARISON WITH DRILLHOLE AND OTHER GEOPHYSICAL DATA .......... 45 7.1 Reviewing the FARA results .......................................................................... 45 7.1.1 Checking the data against logging ................................................................ 45 7.1.2 Internal consistency of FARA tomograms...................................................... 52 7.2 Comparison of FARA results to other data .................................................... 58 7.2.1 Comparisons to drillhole results .................................................................... 58 7.2.2 Comparisons to electromagnetic sounding results ........................................ 69 7.2.3 Comparisons to electrical pole–pole sounding results ................................... 71 7.2.4 Comparison to Mise á la masse results ......................................................... 73 7.2.5 Comparison to seismic crosshole tomography and reflector model ............... 74 8 DISCUSSION ...................................................................................................... 83 REFERENCES ........................................................................................................... 87

2

3
PREFACE
This work has been carried out at Geological Survey of Finland (GTK) on contract for Posiva Oy “Radiowave shadowing (FARA) tomography between Olkiluoto drillholes KR4–KR10 and KR10–KR2 in 2005”, Posiva's order number 9814/05/TUAH. Supervising of the field work was done by Turo Ahokas (Posiva) and Eero Heikkinen (Pöyry Environment Oy).
Posiva, Finland and Andra, France (Dr. Yannick Leutsch) co-operated in this project for review and information exchange. Measurements and processing were co-operated with FGUNPP (Geologorazvedka, St. Petersburg). Field work interpretation and reporting were done by Arto Korpisalo and Tarmo Jokinen (GTK) and Nikolai Popov, Alexander Shuval-Sergeev and Timur Zhienbaev (FGUNPP).
Review of other geophysical information was carried out by Pöyry Environment Oy (Eero Heikkinen). Comparison images were compiled by Jorma Nummela. Kind comments from Pauli Saksa and Pirjo Hellä (Pöyry Environment Oy) and Ilmo Kukkonen (GTK) were considered in this report.
Field survey group. From the left: Tarmo Jokinen, Arto Korpisalo, Konstantin Avdeev,
Nikolaev Popov, Timur Zhienbaev and Alexander Shuval-Sergeev.

4

5
1 INTRODUCTION
Posiva Oy carries out the spent nuclear fuel related research and development in Finland. Work is focused in Olkiluoto, Eurajoki. Underground characterization premises ONKALO have been constructed since 2004. Andra, France and Posiva have co-operated in feasibility assessment of granitic area investigation methods, among them electromagnetic crosshole imaging.
Crosshole radiowave imaging (RIM) was tested 2005 in two drillhole pairs. Method background is in coal mapping and exploration, where conductive bodies and their distance and location azimuth can be detected even when these are not intersected. Resistive coal seams function as wave guides, and termination of seam can be observed to distances of 600 m from transmitter. Previous works in Finland have not been reported. Method was estimated feasible in Olkiluoto because of strong conductivity variation. Conductivity changes according to sulphide content of the rock mass, due to groundwater salinity variation, and due to fracturing. Frequency range of RIM, from hundreds to thousands of kilohertz, is higher than in common electromagnetic soundings. This enables higher spatial resolution, which is further enhanced by drillhole geometry directly applied in investigation volume. Still frequency is lower than in ground penetrating radar, producing greater investigation range, even in conductive or in magnetic environment (Redko et al. 2000, Stevens et al. 1998). Electromagnetic field is diffuse rather than a propagating wave front, making interpretation more demanding.
Comparison to abundantly available background information was included into this work. Data sets contained seismic reflection and tomographic crosshole results, electromagnetic and electrical ground level models, electrical crosshole mise á la masse data, and geological and geophysical drillhole logging information from measured drillholes. External check was possible using data from drillhole OL-KR14, located in the vertical plane defined by OL-KR4–OL-KR10–OL-KR2, but was not included in FARA survey or processing.
Project was set between Posiva Oy and Geological Survey of Finland (GTK). The clients Andra and Posiva defined the tasks and organised the site and background information for use. Pöyry Environment Oy consulted in design and review of field work. GTK co–operated measurements using FARA-MCH drillhole tool and processing with its Russian developer and manufacturer, FGUNPP “Geologorazvedka” who provided advisory expertise in field work and processing. GTK organised the tools, interpreted the data and compiled the report. Field work took place in drillholes OL-KR4, OL-KR10 and OL-KR2 in October–November 2005. Results were processed and delivered by December 2005. Actual image data was receiver later in 2006, and the review was revised to accommodate data quality estimate. Numerical EM modelling was not included into the task.
Field work and processing is presented in Chapters 2–6, as written by Nikolaev Popov, Alexander Shuval-Sergeev and Timur Zhienbaev of FGUNPP and Arto Korpisalo and Tarmo Jokinen of GTK. Results of the review are presented in Chapter 7, written by Eero Heikkinen (Pöyry Environment Oy), who also edited the report text. Review includes presentation of comparison data and performance review of seismic and FARA crosshole methods with comments concerning applicability of the method.

6

7
2 OPERATING PRINCIPLES OF RADIO IMAGING METHOD Radiowave shadowing method (RIM) was developed in the early 1980’s to detect hazards or obstructions in coal panels prior to long-wall mining. Method was successful because the coal seam, having electrical resistivity substantially greater than in the surrounding geology, act as EM wave-guide. The wave-guide allows reasonably high frequencies to be transmitted and received at distances of almost 600 meters. Method can be applied in drillhole to detect conductive bodies and their location azimuth and orientation, even when these are not intersected. Recently the technique has been applied in crosshole imaging mode, and successfully operated also in crystalline bedrock environment in exploration (Redko et al. 2000, Stevens et al., 1998).
Crosshole EM survey has several clear benefits over the ground level electromagnetic sounding methods. Applying a drillhole source brings the survey closer to the target, and will allow usage of higher frequencies and thus enables a higher resolution. Another benefit is possibility to view the target from different angles and directions, not only in vertical direction and from above. Placing the source in drillhole also will enable getting rid of boundary effects related to ground surface and strong attenuation emerging from soil deposits. Drawback is availability and location of drillholes, limited power of transmission of drillhole probe, and a relatively complex behavior of 3D source field within subsurface target, which is difficult to resolve numerically without significant approximations.
The physical behaviour of electromagnetic field in rock is governed mathematically by Maxwell equations. Behaviour varies with distance R from the source. Maxwell's equations describe constitutive relationship and quantify material properties. EM theory on field properties in conductive media and the consequencies for FARA application has been thorougly treated in GTK's Q-report (Korpisalo 2005). This report will refer the key issues.
The time-dependent electromagnetic field interaction in medium can be written according to Maxwell’s equations in differential form.
According to Faraday’s induction law (1) and Ampère–Maxwell’s law (2) the curl of
electric field strength E is comparable to time derivative of magnetic flow density B ,

8
and curl of magnetic flow density B comparable to sum of current density J and time
derivative of electric displacement vector D (electrical flow density).
According to Gauss’s law for electrical and magnetic scalar fields (3 and 4), the
divergence of electric displacement vector D (3) equals to electric charge q, and
divergence of magnetic field density B is zero.
Governing physical properties in electromagnetic interaction in bedrock are the
electrical conductivity ~ , dielectric permittivity ~ , and magnetic permeability ~ .
These tensor quantities define how the medium will interact with electrical field
strength E and magnetic field strength H to procude the flow densities. The material
properties are linking the field and flow properties as
and
First approximation in FARA surveys is to consider these properties linear, i.e., scalars
parallel to source field and independent of source field strength.
Time–alternating E and H fields are intercoupled, and the components are induced
from each another, e.g., magnetic field creates electric fields, vice versa. The fields may
be according to relative rate of loss encountered in medium either in the inductive
(diffuse) or propagating (radio) wave fields.
Eliminating magnetic field from Maxwell’s equations using Faraday’s law (1) and
Ampère–Maxwell’s law (2), is obtained Helmholtz equation for electric field (8):
According to (8), electrical field vectors depend on magnetic permeability and electrical
conductivity, and magnetic permeability and dielectrical permittivity. Eliminating the
electric field, equation of same form would be obtained for magnetic field.
Wave equation form, depending on angular velocity, instantaneous field vector sE can
be written as

9
Expressing complex permittivity εc as in (10) is get
where the loss tangent
is a ratio of conductivity and displacement currents.
One can define square of propagation constant or wavenumber γ (11) as
Propagation constant allows to define the electrical field into (12)
where α (real part of propagation constant) is attenuation rate and imaginary part β is
the phase constant. These properties define how the field is attenuated and phase shifted
according to time and distance. For propagating wave field, in ideal lossless medium
would be α = 0.
Writing solution for propagation constant (13)
Three different zones are generally defined in the terms of wavelength or inverse loss
tangent Q, which are the near field zone (Q<<1, R << ), the intermediate zone (Q
R ) and the far field (the radiative) zone (Q>>1, R>>).
For low frequency and high conductivity domain the inductive (diffusive) equation is
applying the middle term ωμε, attenuation is dominated by conductivity, and effect of
dielectric permittivity is negligible. In high frequency and low conductivity domain the
wave equation is effective (real part, –ω2με), and attenuation will depend dominantly on
dielectric permittivity.
For propagating wave field the electromagnetic interaction is described by wavefront
velocity, angular velocity, wave length, phase, polarization, and attenuation.
In transition domain between diffusive and wave field behaviour, both Re and Im parts
of the equation need to be considered, and attenuation and phase are dependent both on
dielectric permittivity (displacement currents) and conductivity. A transition frequency

10
ftr where displacement currents and conductivity are equal in relative magnitude, is
expressed as (14):
For typical average values of relative dielectric permittivity εr: 6–8 and conductivity ζ:
0.001–0.0001 S/m in Olkiluoto bedrock, the transition frequency gets values of 200–
3000 kHz, i.e., exactly the range of FARA survey in the area. It is also useful to
remember that the dielectric permittivity decreases and conductivity increases according
to increasing frequency.
On neglecting the magnetic permeability µ, in limited domains in Olkiluoto the
susceptibility κ may approach 1, which would require encountering also magnetic
properties.

11
Figure 1. Schematic drawing of FARA transmitter and receiver dipoles and the
effective field components. Tangential electric field Eθ perpendicular to path is
normalised with distance l and with the receiver and transmitter angles to field vector.
The magnetic axial BΦ and electriacl radial ER are not encountered.The paths passing
through cells C are minimised computing line integral of attenuation over cells.
The electromagnetic source in FARA probe is electrical dipole antenna which is aligned
parallel to drillhole axis (Figure 1). The generated 3D dipole field is separated into axial
magnetic B and polarized radial and tangential electrical E vector components (Figure
1). Maximal coupling for the E field is in E-polarization, when the field component is

12
parallel to the conductive target to be surveyed. This will depend both on orientation of
the target and orientation of the field components.
EM field properties are depending strongly on distance from the source, and on the
physical parameters. Inverse of the loss tangent (10), or ratio of real and imaginary part
of wavenumber γ (11), describes the wave field behaviour
When Q >> 1 the dielectric properties are dominant, EM field propagates as wavefront
through medium and all frequency components travel roughly at same velocity (non–
dispersively), encounter the same attenuation α, and the waveform remains non altered
through passage. Velocity v and attenuation α are presented for propagating wave field
as
Attenuation α is depending on dielectric permittivity and electrical conductivity ζ.
When Q<< 1 the velocity v is independent of dielectric permittivity , but is controlled
by conductivity ζ, and the EM field is diffuse. The energy distribution is dispersive, i.e.
attenuation α will depend on conductivity and frequency (f, or angular velocity ).
In diffuse domain the attenuation can be also described in terms of skin depth δ (19), a
distance where the field at each frequency has attenuated to e–1
fraction of initial field
strength (for diffuse plane wave).
The attenuation will depend on distance from the source. Wavenumber γ times distance
r defines the attenuation behaviour. When │γr│< 1 (distances shorter than wavelength),
field attenuation resembles static dipole behaviour r–3
, and when │γr│= 1, attenuation is
governed by distance, wavenumber, exponential decay, and geometric decay. In far
field, when │γr│>> 1 (distances much greater than wavelength), attenuation is
depending inversely on distance, r-1
. This is the case on which FARA crosshole
tomographic interpretation is based on.

13
For low <300 kHz frequencies and short < 50 m distances, and for resistivities <1000
Ohm.m, the FARA operates in near field domain. When frequencies increase >1000
kHz, distances extent >100 m and resistivities approach 10000 Ohm.m, the case is, or is
approaching, the far field. Mostly the behavior takes place in intermediate field,
meaning the near field effects will affect occasionally.
Considering parameter loss tangent or its inverse Q, at the frequency range of 300–2500
kHz the electromagnetic signal behaviour is in intermediate (Q 1) transition domain
between propagating radiowave (high Q >> 1) and diffuse EM field (low Q < 1). In the
transitional domain both dielectric permittivity and electrical conductivity will affect to
attenuation.
True propagating EM wave field is used in radar, with frequencies >10 MHz and wave
lengths < 20 m, but also with limited range. Field properties would be characterized by
travel time, amplitude and reflection. In purely inductive EM field at frequencies < 100
kHz and for > 300 m wave lengths, the interaction would be characterized by frequency,
skin depth, attenuation, and phase difference.
As presented in (Korpisalo 2005), the wave velocity at the FARA frequency range and
dominant relative dielectric permittivity range, εr: 6,5–8, does not depend on
conductivity but on dielectric permittivity, when conductivity is less than ζ < 10-4
S/m.
When conductivity is higher than ζ > 10-2
S/m, velocity is not affected by dielectric
permittivity. At conductivity range ζ: 10-4
–10-2
S/m the velocity v depends on
conductivity ζ and changes from 100…120 m/µs to 50…70 m/µs. Velocity v would be
rather good tool to analyse conductivity distribution, but it is not an interpretation
parameter, as the arrival time is not recorded, despite of synchronization.
Considering the understanding of near and far fields, and high and low Q domains, it is
useful to take the wavelength into account. In the same range of dielectric permittivity
εr and frequencies f, the wavelength is depending on dielectric permittivity εr,
conductivity ζ, and frequency f. At conductivity ζ < 10-4
S/m the wavelength
depends on dielectric permittivity εr and frequency f, ranging at relevant dielectric
permittivity range, εr: 6,5–8, at 35–320 m. At conductivity ζ > 10-2
S/m the
wavelength is little depending on dielectric permittivity εr, and according to frequency
it is varying at 20–60 m. Nevertheless in diffuse EM field domain, and in transition
between near and far field, for resolution the wavelength cannot be directly applied as
a resolution criteria. Cell sizes in inversion are fractions of the wavelength as in true
traveltime tomography there should not be more than 2–4 cells on each cycle.
Attenuation is strongly depending on conductivity at the FARA frequencies. At the
dielectric permittivity range of Olkiluoto rocks, εr: 6,5–8, the dielectric permittivity has
a minor influence to attenuation α. Increasing frequency f increases the attenuation α the
more the conductivity ζ increases. At conductivity range ζ: 10-4
–10-2
S/m, the
attenuation α ranges from 0,05…0,06 dB/m to 1…2,5 dB/m. As the amplitude is the
directly measurable parameter, it can be used to estimate conductivity ζ, bearing in
mind the following limitations:
- attenuation α is formulated for tangential, E–polarised electrical field component
of the dipole antenna having 1/r attenuation in intermediate - far field

14
- formulation holds for isotropic, locally homogeneous medium, any deviations
from this condition will affect also the results.
- the near field effects cause also other polarizations, radial E–field component
with different attenuation α, and static field behavious attenuation related to 1/r3
present; closer than 50–100 m distances need to be considered for these effects.
- off plane conductive targets will also affect strongly to the diffuse field results,
i.e. the “ray” is actually not a ray, but the shortest distance and the field angle
used in normalisation!
- regarding the above stated, numerical inverse modeling would resolve in more
detail the case, where tomogram would be used as a starting model (seed).
It is necessary to understand these fundamantal terms in interpreting FARA results. For
this reason also the full solution of Maxwell’s equations for electrical dipole field would
be useful. In practical tomographic reconstruction an approximation is adequate. There
is yet not available any software, which can take into account the whole wave equation
solution.
In FARA field solution, only amplitude attenuation and phase difference are considered.
Signal velocity, wave length, or phase behaviour is not taken into account. The
amplitude and phase difference data can be interpreted to indicate locations, where the
wave is attenuated or shadowed due to conductive structures. Using three components
would resolve some of geometrical ambiguities. Applying similar crosshole
measurement geometry in time domain would lead to some benefits over the continuous
signal, single frequency amplitude decay approach. One of these is the measurement
during signal off- time.
Important approximation is to consider the survey volume a full space, without taking
the boundary conditions at ground surface into account. Normally in tomography a far
field condition is assumed where source and transmitter are separated by several
wavelengths, which is not completely true in FARA survey, but the approximation
makes interpretation much easier. A further approximation has been made to handle
only electrical conductivity. However the interaction will include also influence of
magnetic and dielectric properties of the rock. In the intermediate domain the
Maxwell’s equations should be preferably completely written open to account the
electrical conductivity, attenuation, magnetic susceptibility, dielectric permittivity and
phase difference.
Spatial variations in physical properties in the survey volume are observed as variation
in received amplitude. In the linear approximation of electrical field, the amplitude is
normalised for distance and dipole field geometry, as deviation from normal of the field
both in transmitter and receiver (maximum field intensity is measured at dipole axis).
The attenuation rate (amplitude loss normalised over distance) is computed to describe
conductivity variation. Multiple pairs of transmitter stations and dense scans over large
angle window can be used to reconstruct a tomographic image on conductivity in a
similar way as for DC Electrical Resistivity Imaging (ERT), which can give geometric
idea on conductivity variation. Inversion will compute resistivity values for cells, which
have attenuation per unit length values (rays) assigned passing through (see Chapter 4
below).

15
3 FARA–MCH FIELD INSTRUMENTATION
The FARA tool is operating simultaneously at maximum four frequencies, 312.5, 625,
1250 and 2500 kHz. Measuring together all frequencies reduces survey time essentially.
Transmitter power is divided between the frequencies, thus highest power is obtained
using a single frequency.
A 35 m long, 36 mm in diameter radio antenna (electrical dipole antenna aligned with
drillhole axis) is used in transmitting signal into the bedrock. Amplitude and phase of E-
polarized electric field component along receiver drillhole axis are measured.
The signal timing and phase are synchronized between transmitter and receiver units via
wireline. This allows the receiver phase relative to transmitter to be measured.
Reference signal improves considerably the tool sensitivity and noise immunity. Special
damping filters are used avoid interference and suppressing the antenna effect off in the
wireline.
Measurements are controlled and information recorded with laptop computer and 32-bit
MS Windows software. The automated measurement process requires operator’s
minimal intervention. The operator can monitor the data quality at all the frequencies in
real time, and view previous results. This allows adjustments in survey depth range and
sampling density, and will enable decision on re-measurement.
System is consisted of control unit, recording units, set of transmitter and receiver
downhole antennae, winch for transmitter and receiver, depth encoder and connecting
cables (Figure 2). Two down–hole cable types of 600 m in length were used, the other
with polyurethane insulation (FGUNPP) and the other steel armoured (GTK). GTK
cable was equipped with FARA adapter to connect the probe.
Technical specifications of the FARA-MCH system are given in the Table 1 below:
Table 1. System information.
Parameter Data
Operating frequencies 312.5, 625, 1250 and 2500 kHz
Measurement voltage range 0.03–1000 µV, +/–10%
Measurement phase difference range 0–360 degrees, +/–5 degrees
Transmitter power 1 W
Cable length (2005) 600 m
Diameter of downhole probe 36 mm
Length of downhole probe 35 m
Max depth of operation 3000 m

16
Figure 2. FARA equipment. The receiver unit (above), the transmitter unit (below), the
antenna (below) and necessary cables, transmitter and receiver tubes, and a small
surface filter are included.

17
4 FIELD WORK AND QUALITY CONTROL
The task of the field work was to test feasibility of the method with respect to known
site properties, and to provide further information on shape and continuity of the
resistive and conductive bodies in the subsurface.
Measurements were carried out in Olkiluoto at two drillhole pairs located roughly on a
same North–South traverse (Easting 1526.000 in Finnish KKJ1 datum). Measurements
were carried out in OL-KR4 and OL-KR10 in the south, and drillholes OL-KR10 and
OL-KR2 in the north.
Diamond drilled holes are water filled, equipped with steel casing to 40 m, and 56 mm
(OL-KR2 and OL-KR4) or 76 mm (OL-KR10) in diameter. Drillholes OL-KR2 and
OL-KR4 are 15–20 degrees tilted from vertical, and their azimuth aligned roughly
towards the North. Drillhole OL-KR10 is almost vertical, tilted 5–12 degrees.
Length of drillholes ranges from 614 m (OL-KR10) to 900 m (OL-KR4) and 1050 m
(OL-KR2). The distances between the drillhole collars were 250 and 300 m and shortest
distances between the drillholes 150–200 m (OL-KR4 to OL-KR10) and 300–400 m
(OL-KR10–OL-KR2). Section ranging from vertical depth 200–600 m was surveyed in
this work.
The highest position of the survey is set approx. to the distance between the drillholes,
to avoid boundary effects of ground surface in interpretation (full space field
approximation). In designing a crosshole profile, the panel depth extent shall be longer
than horizontal distance between the drillholes. Depth of panels was limited by
available cable length (600 m) and depth of OL-KR10.
Before measurements the openness of the drillholes was carefully ensured with dummy
probe. Transmitter is set at a selected depth level in a drillhole. The transmitter stations
were placed at 20 m spacing in OL-KR4, 40 m spacing in OL-KR10 and 70 m spacing
in OL-KR2. Spacing is set to the order of 1/10 of the drillhole distance. Spacing was
first selected 20 m because the conductivity structure was not exactly known. After
preliminary results the spacing was increased to 40 m. The 40 m spacing was applied
also for drillhole pair OL-KR10–OL-KR2. Due to difficulties met in winch operation,
spacing was increased to 70 m for scans from OL-KR2 to OL-KR10, weakening the
quality.
For each transmitter station, a drillhole scan (Figure 3) is performed with dense
continuous logging mode of 2 readings/ second stacked to 0.5 m spacing in final record.
The receiver scan length along the drillhole was determined by the tool sensitivity and
the signal–to–noise ratio. The scan coverage angle (between the drillhole and the
transmitter–receiver ray paths) was usually larger than 40–50 degrees.
After each receiver scan the transmitter was moved to the next station. After the
drillhole transmitter stations were finalised, transmitter and receiver drillholes were
interchanged. This will provide denser and more homogeneous ray coverage near both

18
drillholes, as the receiver scans are faster to perform than moving the transmitter
positions.
All four frequencies were attempted to be measured in panel OL-KR4–OL-KR10.
Frequencies 312.5, 625 and 1250 kHz were applicable. For panel OL-KR10–OL-KR2
three lowest frequencies were measured, of which the frequencies 312.5 and 625 kHz
were applicable. Highest 2500 kHz frequency produced too low signal to noise ratio in
Olkiluoto environment, and the results were rejected. Distance between OL-KR10–OL-
KR2 was too long for 1250 kHz.
Tool phase difference measurement was not calibrated to work in a proper manner,
encountered high noise level, and was left out of processing and this report.
Figure 3. FARA crosshole measurement layout. Conductive body in the middle is
shadowing (causing attenuation) in the EM field.
Transmitter locations were 21 in OL-KR4 at 20 m spacing (200–400 m), scanning OL-
KR10 section 200–450...570 m at 0.5 m interval, and 10 transmitter locations in OL-
KR10 at 40 m spacing (210–570 m), scanning OL-KR4 section 200–635 m. The image
profile is approximately located at 200–630 m length.

19
Transmitter locations were 20 in OL-KR10 at 40 m spacing (210–570 m), scanning OL-
KR2 section 196–630 m at 0.5 m interval. Several interrupts and remeasurements were
caused by winch stopping. Transmitter levels were 9 in OL-KR2, at 40–70 m spacing
(200–640 m), scanning OL-KR10 section 194–570 m at 0.5 m interval. The image
profile is approximately at 200–570…640 m.
Some stations were removed from survey (OL-KR10–OL-KR2 at 640, 600, 560, 522,
520 and 480 m) and replaced with re–measurement (560 and 640 m). Table 2 indicates
the transmitter locations and scanned sections in receiver drillholes.
In Figures 4–6 are presented the field and review personnel during the field work in
October 2005.
Electromagnetic and electric noise and interference were detected to be high due to
power lines and infrastructure (Figures 8–10). Measurement records between drillholes
OL-KR4–OL-KR10 (transmitter at 410 m in OL-KR4, scan at 200–620 m) is displayed
in Figure 9 and between drillholes OL-KR10–OL-KR2 in Figure 10 (transmitter at 290
m in OL-KR10, receiver scan 200–620 m). In OL-KR10 the highest frequency data
(2500 kHz) is not applicable. In OL-KR2 both 1250 and 2500 kHz are too noisy and
signal does not penetrate over 400–500 m.
Figure 4. From left, Eero Heikkinen (Pöyry Environment Oy), Tarmo Jokinen (GTK),
Pauli Saksa (Pöyry Environment Oy), Yannick Leutsch (Andra).

20
Table 2. Performed crosshole measurements in Olkiluoto.
Transmitter location Scan range Comment KR4–400 KR10 150–570
KR4–420 KR10 150–570
KR4–440 KR10 199–570
KR4–460 KR10 200–570
KR4–480 KR10 200.5–570
KR4–500 KR10 200.5–568
KR4–520 KR10 200.5–570
KR4–540 KR10 200.0–570.5
KR4–560 KR10 200.5–570
KR4–580 KR10 260.0–570.5
KR4–600 KR10 261.0–570
KR4–380 KR10 198–569.5
KR4–360 KR10 313–569.5
KR4–361 KR10 200–570 replacement
KR4–340 KR10 199.5–570
KR4–320 KR10 200–510
KR4–300 KR10 197.5–509.5
KR4–280 KR10 200–500
KR4–260 KR10 196–499.5
KR4–240 KR10 200.5–450
KR4–200 KR10 196–449.5
KR10–570 KR4 200–631.5
KR10–530 KR4 300–632
KR10–490 KR4 300.5–633
KR10–450 KR4 200–633
KR10–410 KR4 200–628.5
KR10–370 KR4 200–635
KR10–330 KR4 200.5–633.5
KR10–290 KR4 200–635
KR10–250 KR4 200–632.5
KR10–210 KR4 197–635
KR10–570 KR2 200–630.5
KR10–530 KR2 201–631.5
KR10–490 KR2 199.5–629.5
KR10–450 KR2 200.5–631.5
KR10–410 KR2 199.5–610
KR10–370 KR2 200–610
KR10–330 KR2 200–570
KR10–290 KR2 200–570
KR10–250 KR2 200.5–450
KR10–210 KR2 194–450
KR2–640 KR10 200–425 winch stopped
KR2–641 KR10 423–570 continued section
KR2–600 KR10 249.5–569.5
KR2–560 KR10 250–311 winch stopped
KR2–561 KR10 200–570 replacement
KR2–520 KR10 250–570
KR2–480 KR10 250.5–569.5
KR2–522 KR10 247.5–569.5
(249.5–570)
measured in two directions (winch released?).
KR2–563 KR10 280–570 repeat section
KR2–603 KR10 280–449 repeat section
KR2–604 KR10 448.5–567.5 repeat section
KR2–523 KR10 278.5–567.5 repeat section
KR2–200 KR10 200–570.5
KR2–350 KR10 199.5–570.5
KR2–440 KR10 199.5–570
KR2–270 KR10 194.5–570

21
Figure 5. Alexander Shuval-Sergeev installing the transmitter in drillhole OL-KR4.

22
Figure 6. Nikolaev Popov and Alexander Shuval-Sergeev controlling the
measurements at the receiver station.

23
Figure 7. Timur Zhienbaev, Alexander Shuval-Sergeev, Nikolaev Popov, Arto Korpisalo
and Konstantin Avdeev running the survey and Pauli Saksa and Eero Heikkinen visiting
at the receiver station.

24
a)
b)
c)
d)
Figure 8. FARA amplitude and phase records in two different kind of environments. Left
panel (a+c) is recorded in absence of electromagnetic and infra–structural noise. Right
panel (Olkiluoto measurements) (b+d) recorded in a strong electromagnetically noisy
area.

25
a)
b)
Figure 9. a) Measurement from the section OL-KR4–OL-KR10, frequencies 2500 kHz
on top thru 325 kHz on bottom. Blue curve is filtered value, and red dots the scattered
(noisy) instantaneous values about the average. a) Amplitude profile and b) the
corresponding phase difference profile. Phase measurement unit was not working in a
proper way.
a)
b)
Figure 10. The FARA measurement in the drillhole section OL-KR10–OL-KR2,
frequencies 2500 kHz on top thru 312.5 kHz on bottom, a) amplitude and b) phase
difference.

26

27
5 PROCESSING AND INTERPRETATION
The results have been processed in two stages. At the first stage, the measured signal
was smoothed and sampled, and the 360 crossovers of the phase were corrected either
automatically or manually. In processing the signal was cleaned from noisy sections and
spurious values with rejection and average filtering (Figure 11).
Figure 11. A screen of the processing program with the field curves of amplitude and
phase for two frequencies. The region of noisy signal is eliminated in processing.
Only the amplitude measurements were being processed. No phase measurements were
made because of the receiving unit malfunction.
A quality control was performed for transmitter station number and receiver scan length
(station number) in a X–Y plot of amplitude values, and viewing possible outliers and
spurious values from these plots (Figure 12).

28
Electrical field amplitude Ef for each “ray path” is measured and normalised for both
transmitter and receiver angles with respect to drillhole axis and the dipole field, and the
distance (Equation 20, Korpisalo 2005).
In Equation 20, r is the transmitter–receiver separation, Θr and Θt the ray incident angles
with respect to transmitter and receiver dipole axis (see Figure 1 above), E0 the source
strength (which is initially unknown), and α is the attenuation rate.
Amplitude decay vs. unit ray length (Eq. 21) is obtained as a property to be processed.
Total attenuation from transmitter to receiver is a line integral τn of attenuation rate α
along the ray path “path”, for nth ray:
a)
b)
Figure 12. Quality control plot for 312.5 kHz between transmitters in OL-KR4
(horizontal axis) and receivers in OL-KR10 (vertical axis). a) Indexed image of 21
sources and 700–800 receivers. b) Symmetric rendering at 5 x 5 m cell size (smoothing
receivers). High amplitude (red) is running diagonally according to closest point
between drillholes. Amplitude maximum occurs at few sources, and a narrow band on
receivers, where high resistivity layer is met.

29
The integral can be presented in terms of apparent attenuation rate (dB/m), using
Equation 22 (Korpisalo 2005):
where E is measured field, E0 is initial field, and the third term the ray angle
compensation for measured E field (Eq. 20). In practice the differences from average
attenuation α0 are resolved for each cell. Sources of error arise from 1) measurement
errors, 2) uncertainty in interpreted E0 and 3) near field effects (deviation on far field
approximation).
The data arrays were prepared to reconstruct tomographic images. Drillhole deviations
were accommodated as 3D profiles.
The studied section is discretized into rectangular cells. Number of rays passing through
each cell is determined. The ray path density distribution of the tomographic section is
shown in Figures 12 and 13. In central part of the panels the density is 1300–1800 on
each cell. On edges the ray density is below 10.
Interpretation of a tomographic inversion shall include a discussion of ray path coverage
in order to know which parts of the resulting model are best constrained by the data. In
this imaging project the ray densities in the top and bottom parts of the sections are low.
So there are artefacts in the image due to low ray coverage of parts of the model. Both
the number of rays and the angles, here 40–50 degrees, of the ray paths are important
for creating a well-determined tomographic image.

30
50 100 150 200 250
-600
-550
-500
-450
-400
-350
-300
-250
-200
-150
Kr4 Kr10
RIM tomography reconstructionRays density
200
400
600
800
1000
1200
1400
1600
N
Figure 13. Ray density map in panel OL-KR4–OL-KR10. Cell size is 5 x 5 m. Both
receiver–transmitter directions are included in the same image. Ray coverage 1300–
1800 is in the middle, and <10 on the edges. Artefacts are concentrated on the low
coverage areas, on top and bottom parts of the section, and near source locations.
31
0 50 100 150 200 250 300 350 400 450 500
-600
-550
-500
-450
-400
-350
-300
-250
-200
Kr10 Kr2
RIM tomography reconstructionRays density
200
400
600
800
1000
1200
N
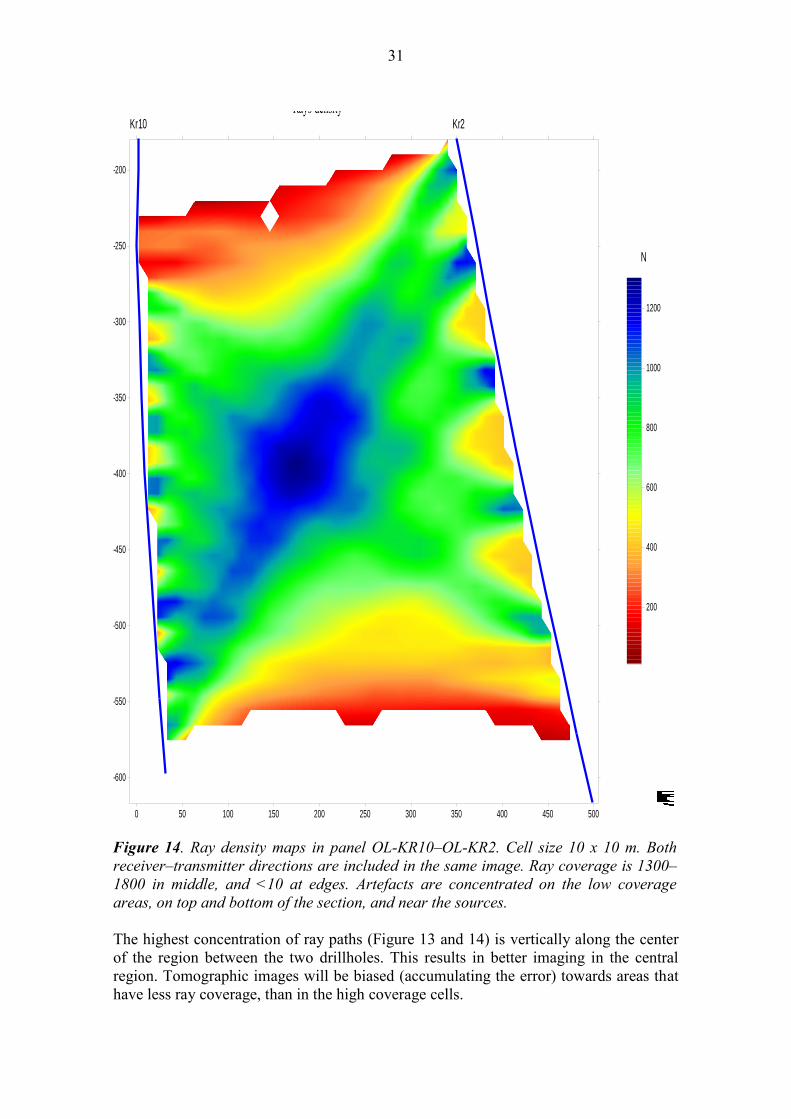
Figure 14. Ray density maps in panel OL-KR10–OL-KR2. Cell size 10 x 10 m. Both
receiver–transmitter directions are included in the same image. Ray coverage is 1300–
1800 in middle, and <10 at edges. Artefacts are concentrated on the low coverage
areas, on top and bottom of the section, and near the sources.
The highest concentration of ray paths (Figure 13 and 14) is vertically along the center
of the region between the two drillholes. This results in better imaging in the central
region. Tomographic images will be biased (accumulating the error) towards areas that
have less ray coverage, than in the high coverage cells.

32
The 3D coordinates of the measurement points are calculated and a correction is made
for the measurement geometry. The normal field is chosen either spherical (inverse
distance) or cylindrical (inverse square–root distance) and source–receiver geometry is
removed (incidence angle compared to dipole axis both from transmitter and to receiver,
Equation 20 above).
A joint analysis of amplitude and phase plots is performed. The above plots are
compared with those of the normal field.
Tomographic inversion is computed to minimise the attenuation integral (21) over the
ray path. Cell size 5 x 5 m was selected for panel OL-KR4 to OL-KR10 and cell size 10
x 10 m for panel OL-KR10 to OL-KR2.
Tomographic processing was performed separately for each frequency, at 312.5, 625
and 1250 kHz for pair OL-KR4–OL-KR10 and at 312.5, 625 kHz for pair OL-KR10–
OL-KR2. At higher frequencies, the signal level was too low, compared to very high
noise level. In a less conductive environment, and in lower noise environment, the high
frequencies would perform well.
Further smoothing of spurious values will perform in the inversion. From the survey
data was removed regions where any geometric or noise interference is distorting the
results, and the transmitter–receiver distance was greater than survey range.
Statistical analysis is used for averaging the attenuation value over rays computed in the
cells. Lowest of obtained absorption coefficients has been used, which is providing the
most robust results.
Each cell has been assigned with a resistivity value. The attenuation between drillholes
is used for estimating the resistivity properties of the rock. The level of resistivity after
inversion has been deduced from external drillhole logging data. Selecting the normal
field and other parameters, it is necessary to have available the resistivity logging data
and the maximum of geological information.
Survey wavelengths range at 50–300 m in Olkiluoto bedrock medium. The wavelength
is much larger in dimension than the thickness of observed features or cell size in
inversion.
Main application scheme of the FARA method is radiowave shadowing, i.e. recognition
of paths where the guided radiowave penetrates well, or does not transmit through. It is
however possible to make amplitude or phase difference imaging using damped
inversion. This would use high measurement coverage, and the cell sizes (5 x 5 or 10 x
10 m here) are not of relevant on their size compared to the wavelength but to the
number of rays penetrating each cell. Creating an image like this may not be
mathematically unique, but it can help in understanding and presenting the
measurement data. Consequently the analysis is not based on wavefield approximation,
and as diffuse field amplitude decay is used, inversion will correspond a straight path
approximation, as curved ray approximation does not have here any physical meaning
like it would for velocity field.

33
With wavelengths 50–300 m the survey is performed in transition domain between near
field and far field. Some precautions are useful when using far field approximation.
In this transition domain several factors affect to the assumed electrical field interaction:
- near–field effects are present, e.g. not only tangential electrical field is
encountered, but also the radial component, which has different polarization and
decay characteristics
- source dipole is not point–like, but has a significant length dimension, here 35
m, compared to target
- actual transmission time is not measured, so there is no control on velocity
- amplitude vs. distance and transmission angle are correlated to resistivity of the
subsurface,
- the changes in phase difference could in principle be associated to dielectric
permittivity, via slowness of the signal
- magnetic permeability is not taken into account in the approximation
- any off–plane events may affect to the actual results, and cannot be resolved in
single–hole survey panel. Several drillhole panels would resolve this case.
- reflection, scattering and diffraction are ignored
- contrasts are assumed small (which is not true in Olkiluoto site).

34

35
6 RESULTS
The interpretations were done with the Russian software. The results with ImageWin
software are presented in GTK Q series report (Korpisalo 2005). Examples of results
obtained by ImageWin are shown for reference of data set not constrained with logging
data. There were 30 appropriate transmitter positions in the first section OL-KR4–OL-
KR10 and 17 positions in the second section OL-KR10–OL-KR2.
A homogeneous resistivity distribution has been taken as a starting value in the
inversion. All additional data including resistivity values in drillholes are taken into
account when tomographic sections are generated. During data handling the Russian
experts represented results which were not constrained with logging data. The images
had the same characteristics as the final images, which are smoother than the images
used in field control.
6.1 Drillhole panel OL-KR4–OL-KR10
For drillhole panel OL-KR4 to OL-KR10 the distance between the drillholes in the
upper part was 250 m, whereas in the lower part of the working interval it was reduced
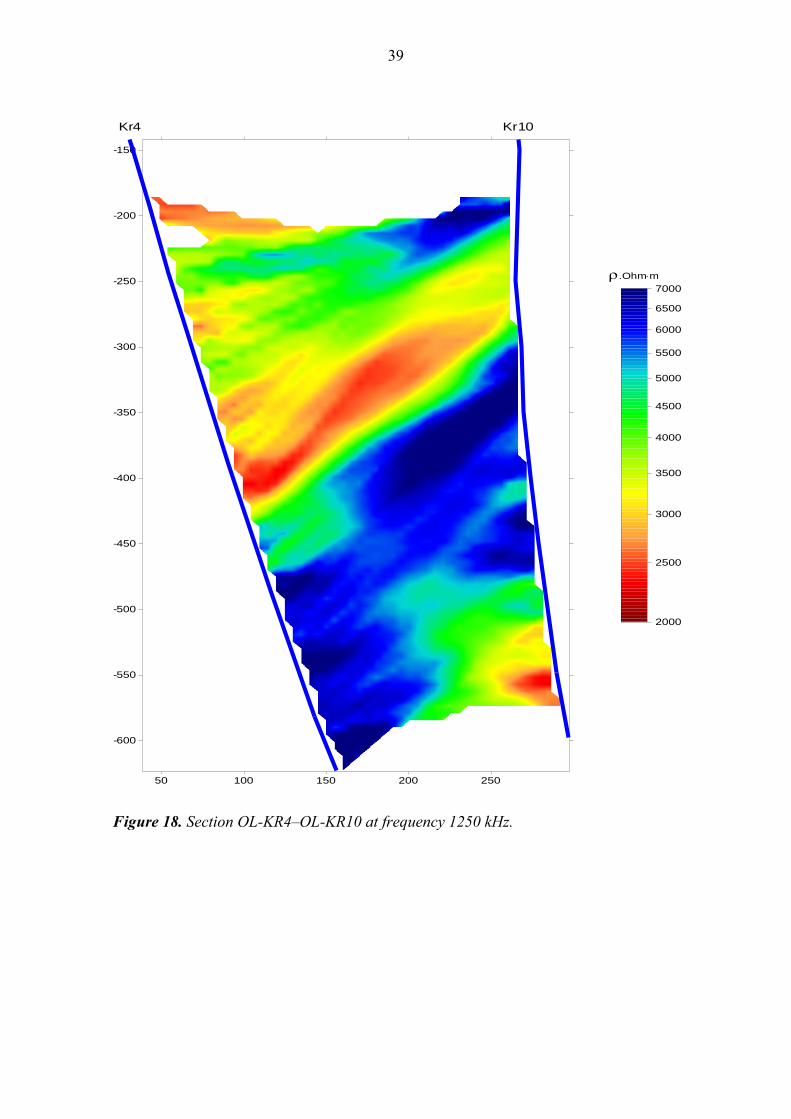
to 150 m. In Figures 15–18, the interpretation results for three frequencies are given.
As a whole, the results obtained at different frequencies coincide. The range of obtained
apparent resistivities is 2000–7000 ohm–m. The contacts of the zones with lower
resistivities are generally dipping from drillhole OL-KR10 to drillhole OL-KR4 (from
the north to the south), the dip angle being about 40 degrees. The main lower resistivity
zone is extended from depths of 220–300 m in drillhole OL-KR10 to depths of 350–430
m in drillhole OL-KR4. The conductivity of this zone increases with depth. No
discontinuity was detected in the crosshole space.
Another lower resistivity zone is adjacent to drillhole OL-KR4 at depths of 220–350 m.
This zone is practically pinched out towards the middle of the crosshole space. A less
intensive and short zone is adjacent to this drillhole at depths of 470–500 m.
Between these conductive zones, there is a resistive layer extending from OL-KR4 at
500–600 m to KR10 at 300–500 m.
All these low resistivity zones are reflected in the available data of resistivity logging.
The sole exception is a lower resistivity zone adjacent to drillhole OL-KR10 at depths
greater than 500 m. The well logs do not show any considerable decrease in resistivity
within this interval; nevertheless, the zone is detected with confidence at all frequencies.
Its appearance may be due to the presence of a conductive zone in the immediate
vicinity of the drillhole both in the tomographic section plane and some distance away
from it. Or, this may result from an error in drillhole deviation profile.

36
50 100 150 200 250
-600
-550
-500
-450
-400
-350
-300
-250
-200
-150
Kr4 Kr10
RIM tomography reconstructionApparent resistivity, 312,5kHz
2000
2500
3000
3500
4000
4500
5000
5500
6000
6500
7000
r.Ohm×m
Figure 15. Section OL-KR4–OL-KR10 resistivity at frequency 312.5 kHz.

37
Figure 16. Attempt to run inversion without drillhole constraint (ImageWin), frequency
312.5 kHz. Red dots are the transmitters. Though it is clear the inversion is not final,
many features are resembling the ones presented by FGUNPP.

38
50 100 150 200 250
-600
-550
-500
-450
-400
-350
-300
-250
-200
-150
Kr4 Kr10
RIM tomography reconstructionApparent resistivity, 625kHz
2000
2500
3000
3500
4000
4500
5000
5500
6000
6500
7000
r.Ohm×m
Figure 17. Section OL-KR4–OL-KR10 at frequency 625 kHz
39
50 100 150 200 250
-600
-550
-500
-450
-400
-350
-300
-250
-200
-150
Kr4 Kr10
RIM tomography reconstructionApparent resistivity, 1250kHz
2000
2500
3000
3500
4000
4500
5000
5500
6000
6500
7000
r.Ohm×m
Figure 18. Section OL-KR4–OL-KR10 at frequency 1250 kHz.

40
6.2 Drillhole panel OL-KR10 – OL-KR2
The distance between the drillholes in the upper part was 300 m, whereas within the
working interval it was 400–500 m. In Figures 19–21, the interpretation results for two
frequencies are given.
The most distinct feature in this drillhole panel is the resistive domain from OL-KR10
at 300–550 m depth level to OL-KR2 at level 200–450 m.
The conditions for measurements in this drillhole pair were less favourable than in the
above mentioned pair. The depth interval of measurements did not exceed 400 m and
was not greater than the distance between the drillholes. Such geometry of does not
allow to obtain the exact contours of boundaries, especially with medium and steep
dips, in the upper and lower parts of the section. Nevertheless, the picture of the central
part of the section is achieved with a sufficient accuracy.
Like in the first drillhole pair, the tomographic sections, obtained at different
frequencies coincide in general. The range of apparent resistivities is within 3000–9000
ohm–m. The conductive zone, adjacent to drillhole OL-KR10 at depths less than 300 m,
is in agreement with the zone obtained in the adjoining section (OL-KR4–OL-KR10). It
is impossible to determine its dip angle because it is too close to the top edge of the
section; one can only assert that this zone goes up towards drillhole OL-KR2 and
intersects it above the studied interval, i.е. above 200 m. The similar situation can be
observed in the bottom part of the section, where a conductive zone is adjacent to
drillhole OL-KR2 and is dipping towards drillhole OL-KR10, going below the studied
interval. The position of this zone is in agreement with the resistivity logging data in
drillhole OL-KR2.

41
0 50 100 150 200 250 300 350 400 450 500
-600
-550
-500
-450
-400
-350
-300
-250
-200
Kr10 Kr2
RIM tomography reconstructionApparent resistivity, 312,5kHz
3000
4000
5000
6000
7000
8000
9000
r.Ohm×m
Figure 19. Section OL-KR10–OL-KR2 resistivity at frequency 312.5 kHz.

42
Figure 20. Section KR10–KR2, an attempt to run inversion without drillhole constraint
(ImageWin), 312.5 kHz. Red dots are the transmitter locations. Though it is clear the
inversion is not final, many features are resembling the ones presented by FGUNPP.

43
Figure 21. Section OL-KR10–OL-KR2 resistivity at frequency 625 kHz.
The dip angles of the lower resistivity zones can be only judged with confidence for the
central part of the section, where an anomalous region is traced adjacent to drillhole
0 50 100 150 200 250 300 350 400 450 500
-600
-550
-500
-450
-400
-350
-300
-250
-200
Kr10 Kr2
RIM tomography reconstruction
Apparent resistivity, 625kHz
3000
4000
5000
6000
7000
8000
9000 r .Ohm × m
Fig. 6

44
OL-KR2 at a depth of about 250 m. Its intensity is decreasing sharply as going away
from the drillhole; however, it can be traced almost to drillhole OL-KR10. Its dip angle
is close to that of the boundaries of conductive regions in the previous pair (about 30–35
degrees). No more marked conductive targets have been detected in the crosshole space.

45
7 COMPARISON WITH DRILLHOLE AND OTHER GEOPHYSICAL DATA
The drillholes intersect mostly migmatitic (veined and diatexitic) gneiss, tonalitic–
granodioritic–granitic gneiss (TGG) and granite pegmatite, which are the dominant rock
types in Olkiluoto (Paulamäki et al. 2006). The bedrock resistivity in DC range varies
according to drillhole logging from highly resistive (> 10 000 ohm.m) gneisses to fairly
conductive sulphide bearing layers (< 100 ohm.m).
FARA data was received in Pöyry Environment Oy as field records and processed
image grids. Field records for each transmitter station and drillhole scan were reviewed
together with drillhole logging data. These recorded values have not been filtered for
spurious values, neither normalized for geometry and distance.
7.1 Reviewing the FARA results 7.1.1 Checking the data against logging
Some general observations were made. From the transmitter antenna, the signal
penetrates generally well to the measurement drillhole. Highest amplitude, or generally
some signal, is found when both receiver and any part of the transmitter are located in a
potentially same, even narrow resistive layer or “window”, if the layer is continuous.
The antennae are long (35 m) compared to intersection length of conductive beds. The
penetration does not depend on antenna length located at the resistive domain.
Resistive layers appear to cause wave guide phenomenon, where the amplitude
increases compared to surroundings. If there are conductive bodies between the
transmitter and receiver, signal will be always decayed. Subsequent conductive layers
(which are typically rather narrow) between the transmitter and receiver will lower the
amplitude step by step with some ratio. When the distance increases, or several layers
are encountered, the signal may decay completely below noise level (e.g from top of
OL-KR4 to bottom of OL-KR10).
One can make some interpretations of the scans even without tomographic image
reconstruction, which would however help in understanding the results geometrically.
Reasonable way to compare the raw data would be to normalize the results for distance
and measurement geometry, and to screen out the outliers with average or median
filtering, and then plot the results along drillhole axis. Here the data was assessed
without normalization.
The compared high amplitude locations, and locations with change of amplitude,
correlate well with the resistivity logging data, and can be explained with drillhole
observations. These results also indicate the possible resistive layer connections
between drillholes, and locations of conductive beds possibly terminating these resistive
domains. It is also possible to estimate the conductive layer locations extending between
the drillholes. General views of the results are presented in Figures 22–25 for profiles
measured from some of the transmitter stations.

46
The results for transmitters in OL-KR4 measured in OL-KR10 are (Figure 22):
- according to amplitude OL-KR4 transmitter locations are on slightly higher
conductivity at 380–440 m, on resistive domain 460 m, and on conductive area
again from 480 m downwards.
- The signal from 200–380 m penetrates to OL-KR10 between 200–260…280 m,
indicating a resistive domain which can be followed. Depth 280–290 m contains
a local conductive body, separating the resistive layers. Source at 380 m “sees”
390 m at OL-KR10 as a blind conductive body.
- The signal penetrates from 400–460 m well to OL-KR10 between 290…330–
450…480 m. Signal level drops upwards from 200 m, and there is a drop in
level also at 230 m. From 480 m in OL-KR4, the signal increases suddenly at
540 in OL-KR10, indicating a resistive connection. Local drop of signal at 400
m indicates presence of a small conductor.
- From 540–600 m in OL-KR4, resistive layer connection is limited between 420–
525…550 m in OL-KR10.
Figure 22. Raw signal from OL-KR4, example stations 200 m, 400 m, 460 m and 600
m, measured in OL-KR10 and long normal resistivity in OL-KR10. Resistivity low areas
in 260–270 m and 290 m and below 400 and 500 m indicate change in amplitude trend.
The reverse measurements from OL-KR10 sources in OL-KR4 indicate rather similar
behaviour (Figure 23):
- Sources at 210 and 250 m suggest a resistive layer to continue until ca. 400 m in
OL-KR4, where are found some conductive bodies.
- Source at 290 m indicate almost step–like feature, with limits of high amplitude
domain, or shadowing up and downwards, at 300 and 450 m. This zone, despite
of high amplitude, is a conductive domain in logging, which would suggest the
high amplitude is caused by guided wave.

47
- Sources at 330–410 m show resistive layer connection to 430–490 m in OL-
KR4, and sources 450–570 m connection to below 530 m. For these sources the
300–450 m in OL-KR4 indicates lower resistivity than sections below and
above, indicating also a strong conductor domain in reconstructed resistivity
images. It can be suggested that conductor domain between OL-KR4 300–450 m
and OL-KR10 260–290 m, seen also in resistivity logging, is continuous through
the drillhole section.
Figure 23. Raw signal from OL-KR10, example stations 210 m, 290 m, 370 m and 570
m, measured in OL-KR4 and long normal resistivity in OL-KR4. Resistivity low areas
in 300–430 m and 490 m indicate change in amplitude trend.
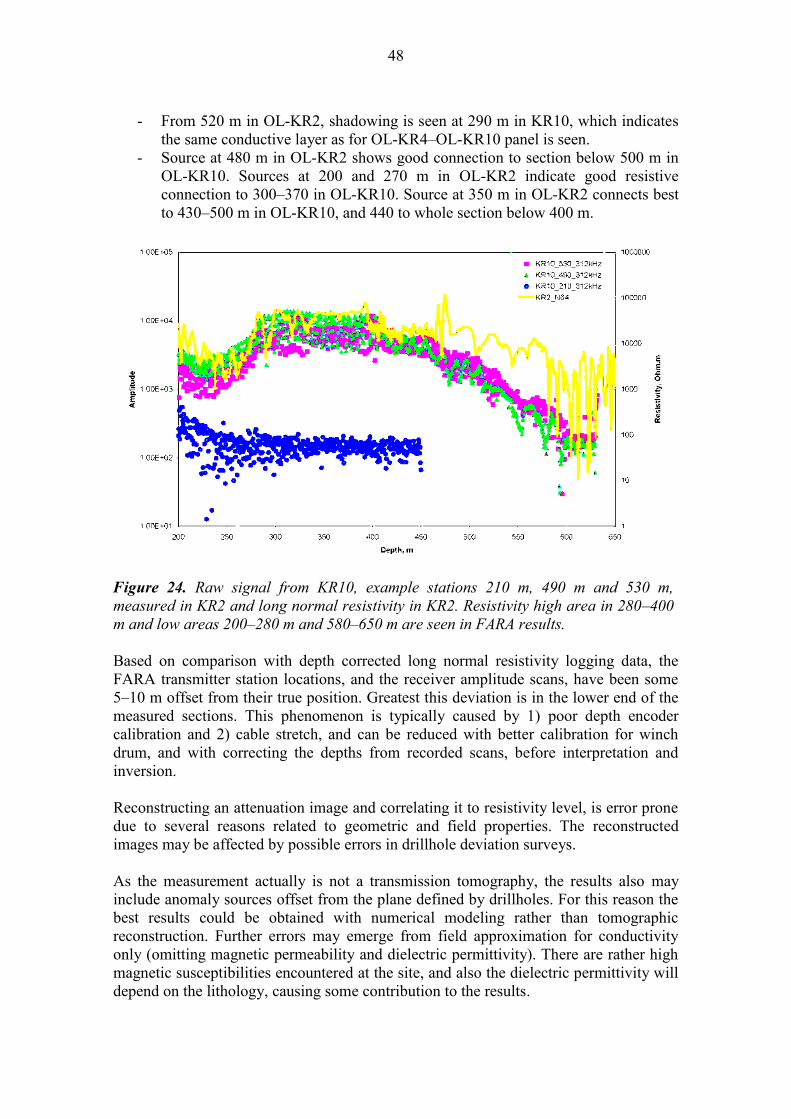
The profiles measured in OL-KR2 from transmitters in OL-KR10 indicate rather
interesting behavior (Figure 24):
- Transmitters at 210 and 250 m in OL-KR2 indicate very low amplitude, though
closest distance between drillholes. This is apparently due to conductors at 260–
270 m and 290 m in OL-KR10, which is not penetrated by the measurement
system. For all other profiles, these conductors are seen as amplitude change at
250–280 m.
- A resistive layer is seen from all transmitters 290–570 m in OL-KR10 at 280–
400 m in OL-KR2. This is matching with long normal resistivity logging data.
Depths 530 m and 600 m indicate also amplitude drop (possible conductors) in
OL-KR2.
The profiles measured in OL-KR10 from transmitters in OL-KR2 show following
(Figure 25):
- Practically very little signal reaches OL-KR10 from deep parts of OL-KR2
below 560 m. Drillholes are deviated away from each other.
48
- From 520 m in OL-KR2, shadowing is seen at 290 m in KR10, which indicates
the same conductive layer as for OL-KR4–OL-KR10 panel is seen.
- Source at 480 m in OL-KR2 shows good connection to section below 500 m in
OL-KR10. Sources at 200 and 270 m in OL-KR2 indicate good resistive
connection to 300–370 in OL-KR10. Source at 350 m in OL-KR2 connects best
to 430–500 m in OL-KR10, and 440 to whole section below 400 m.
Figure 24. Raw signal from KR10, example stations 210 m, 490 m and 530 m,
measured in KR2 and long normal resistivity in KR2. Resistivity high area in 280–400
m and low areas 200–280 m and 580–650 m are seen in FARA results.
Based on comparison with depth corrected long normal resistivity logging data, the
FARA transmitter station locations, and the receiver amplitude scans, have been some
5–10 m offset from their true position. Greatest this deviation is in the lower end of the
measured sections. This phenomenon is typically caused by 1) poor depth encoder
calibration and 2) cable stretch, and can be reduced with better calibration for winch
drum, and with correcting the depths from recorded scans, before interpretation and
inversion.
Reconstructing an attenuation image and correlating it to resistivity level, is error prone
due to several reasons related to geometric and field properties. The reconstructed
images may be affected by possible errors in drillhole deviation surveys.
As the measurement actually is not a transmission tomography, the results also may
include anomaly sources offset from the plane defined by drillholes. For this reason the
best results could be obtained with numerical modeling rather than tomographic
reconstruction. Further errors may emerge from field approximation for conductivity
only (omitting magnetic permeability and dielectric permittivity). There are rather high
magnetic susceptibilities encountered at the site, and also the dielectric permittivity will
depend on the lithology, causing some contribution to the results.

49
Figure 25. Raw signal from OL-KR2, example stations 200 m, 350 m, 440 m and 640
m, measured in OL-KR10 and long normal resistivity in OL-KR10. Resistivity low area
in 260–290 m and high below 300 m is seen in FARA results.
Image reconstruction in FGUNPP used the drillhole electrical logging data as
constraint. Attempt to reproduce the inversion using ImageWIN software in GTK led to
a roughly similar resistive and conductive domain distribution as in FGNUPP images,
but more spurious and scattered images, so apparently stronger smoothing is necessary.
Drillhole resistivity constrain has not been possible in GTK approach. Some crossing X-
shaped lines over the image panel suggest that the drillhole geometry, or depth levels of
measurement stations, are not correct.
The transmitter locations indicate bulls–eye type increase in conductivity. Emphasis
should be made to reject spurious values, select a proper inversion scheme from
available options (between ART, SIRT, Conjugate gradient or Least squares), select
efficient averaging and damping methods, and to select a proper, large enough cell size.
Results are reasonable to display on a narrow amplitude scale, to prevent spurious
extreme values from dominating the images.
Apparently the FGUNPP inversion has managed to use a robust technique in averaging
the decay values on cells (selection has been made to use minimum attenuation). Trade
off of using logging data is the expected tendency to satisfy the logging information,
and generate errors elsewhere. The images are increasing conductivity levels in areas
where coverage of data is reduced, and emphasizing the continuity of resistive and
conductive features from drillhole to another.
It would be useful to compute and display the inversion both without any drillhole
resistivity constrain data used, and with constrain applied. Backward comparison was

50
made between drillhole logging data and cell resistivity values picked from images. A
reasonable match is natural as drillhole resistivities have been used (Figure 26).
Resistivities obtained from image are smoother, varying less than logging data.
Nevertheless it is possible to locate some coinciding resistive and conductive domains
along drillholes.

51
a)
b)
Figure 26. Picked cell resistivities on vertical depth from FARA image of 312.5 kHz, a)
OL-KR4 and b) OL-KR10. The FARA resistivities are smoother, and slightly below the
DC resistivity values. Higher conductivity in KR4 is clearly observed. Minima are
close to same locations, but not perfectly, indicating possible depth errors. With
increasing depth, FARA resistivity gets lower, which may indicate error in deviation
profile, or e.g. influence of saline groundwater in bedrock.

52
7.1.2 Internal consistency of FARA tomograms
The FARA tomograms were compared between frequencies 312.5 kHz, 625 kHz and
1250 kHz, and between drillhole sections OL-KR4–OL-KR10 and OL-KR10–OL-KR2.
Images were displayed on a same resistivity scale between all frequencies and both
panels to allow comparison. There is a distinct resemblance of results between the
frequencies, though there are more details on higher frequencies.
On a general view the reconstructed image panels coincide, as compared to each other
at their seam location along OL-KR10. The match is partly good and partly poor. The
resistivity levels range from 2000–3000 to 7000–9000 Ohm–m in the panels, drillhole
OL-KR10–OL-KR2 indicating a slightly higher resistivity than OL-KR4–OL-KR10
(either a real property or a leveling error).
Conductive and resistive beds, and their potential orientations (southerly dips) are
matching fairly well to estimated geological control. Images suggest a strong
continuation of features dipping from right (North) to left (South) downwards at 20–30
degrees apparent dip in both panels OL-KR4–OL-KR10 and OL-KR10–OL-KR2.
Inversion without drillhole constraint does not emphasize so much the conductor
continuity between drillholes (Figures 16 and 20 above).
Well matching part is the 200–400 m interval in OL-KR10, where the conductive
locations at 250–300 m appear well in both panels. The panel OL-KR4–OL-KR10
suggest conductive zone residing near the upper part of OL-KR4, and possibly
continuing towards upper part of OL-KR10. Upper part of OL-KR10–OL-KR2 panel
indicates conductive domain on the top of the section.
Also the continuous resistive domain between lower part of OL-KR4 to mid–OL-KR10
at 300–400 m is seen in OL-KR10 all results. This domain is extending through panel
OL-KR10–OL-KR2 to pass through OL-KR14 and to reach OL-KR2.
Further the results suggest that there is a high conductivity adjacent to deepest part of
OL-KR10 at 450–600 m in OL-KR4–OL-KR10 panel. This does not receive support
from drillhole logging data. The resistivity in OL-KR10–OL-KR2 panel is high at this
location, receiving gain from the logging data.
Possible reasons for the contradiction are a real conductive zone somewhere near OL-
KR10 (increased sulphide content or saline groundwater boundary), or an error in
drillhole deviation file, causing failure in field normalization. This may also appear an
inversion artefact due to low data density.
Nevertheless there is a conductive domain between the lower part of OL-KR2 and OL-
KR10, which may be seen in OL-KR2 but not penetrated by OL-KR10.

53
Figure 27. Drillhole resistivity images OL-KR4, OL-KR10, OL-KR14 and OL-KR2 with
FARA tomograms of 312.5 kHz (resistivity range 2000–8000 ohm–m) and long normal
resistivity (blue) and fracture frequency (orange) logging profiles.

54
Reasons to contradiction may range:
a) unknown conductive body between OL-KR4–OL-KR10 or close to OL-
KR10 at 450–550 depth range, not intersected in any of drillholes
b) a large unconformity in otherwise continuous structure near KR10
(fault, fold,….)
c) noise or error in measurement data at this depth range
d) error in level of the data (e.g. the source intensity)
d) artefact on inverted image due to limited amount of ray density and
unfavourable geometry, when in inversion the errors would spread to less
covered areas.
These issues may become resolved during further investigations, like imaging between
other nearby drillhole pairs, or recomputing the tomographic reconstruction with
updated drillhole deviation data.
The resistivity images on different frequencies are displayed in Figures 27–30, along
with rock types and fracture frequency, and rendered resistivity distribution in drillhole
logging on same resistivity scale.
55
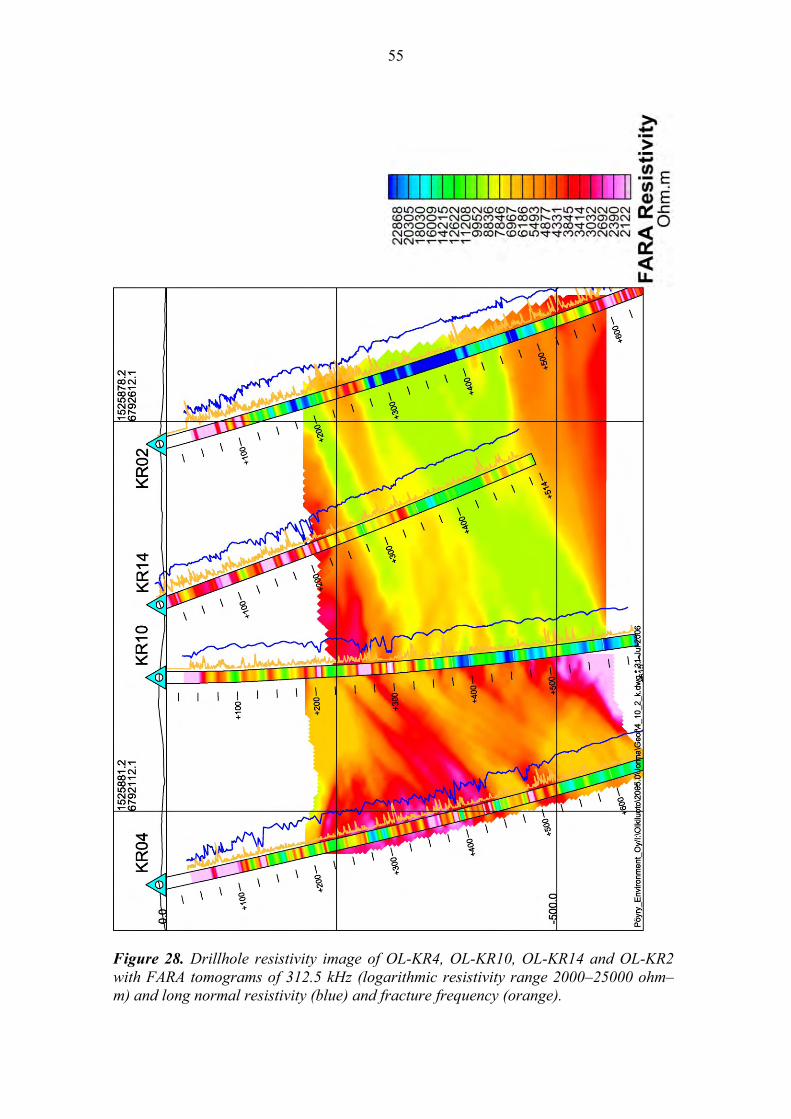
Figure 28. Drillhole resistivity image of OL-KR4, OL-KR10, OL-KR14 and OL-KR2
with FARA tomograms of 312.5 kHz (logarithmic resistivity range 2000–25000 ohm–
m) and long normal resistivity (blue) and fracture frequency (orange).

56
Figure 29. FARA tomograms of 625 kHz and drillhole resistivity images (in
logarithmic resistivity from 2000 to 8000 ohm.m, see Figure 27 for legend), along with
profiles long normal resistivity (blue) and fracture frequency (orange).

57
Figure 30. FARA tomogram of 1250 kHz (OL-KR4–OL-KR10) and drillhole resistivity
images (logarithmic resistivity range 2000–8000 ohm–m, legend in Figure 27), with
long normal resistivity (blue) and fracture frequency (orange).

58
7.2 Comparison of FARA results to other data
The FARA images were drawn on vertical section Easting = 1526.000 (Finnish KKJ1)
in 3D visualization CAD system at uniform resistivity scales, together with drillholes,
lithology, drillhole fracture frequency (Paulamäki et al. 2006), electrical long normal
resistivity logging, magnetic susceptibility, sonic P–velocity (Julkunen et al. 1995, Lahti
et al. 2001, Laurila & Tammenmaa 1996, SMOY 1989, SMOY 1990), radar single hole
attenuation and first arrival time (Carlsten 1990, 1991, 1996a, b; Saksa et al. 2001), and
the seismic velocity tomogram from OL-KR4–OL-KR10, and a migrated crosshole
seismic reflection map at Z: -120– -600 m, the large scale seismic VSP reflectors
(Enescu et al. 2004, Heikkinen et al. 2004a), and geological structures and deformation
zone intersections from geological model version 0 (Paulamäki et al. 2006).
To compare the results to the other available electrical results, also large scale
electromagnetic and electrical results were shown. The frequency domain
electromagnetic Gefinex 400 Sampo sounding (vertical magnetic dipole) interpretations
from 200 m in-line profile (Paananen et al. 2007, Paulamäki et al. 2006), and pole-pole
electrical soundings (Heikkinen et al. 2004b) were plotted on the vertical section.
Results of crosshole mise-á-la-massé survey were presented (Lehtonen 2006).
These were used to correlate the other geophysical information from the vertical section
to FARA results.
7.2.1 Comparisons to drillhole results
Drillhole data can be compared in OL-KR4 at 200–650 m, OL-KR10 200–575 m, OL-
KR14 220–514 m and OL-KR2 190–600 m where tomographic images and drillhole
data overlap. Tables 3-6 below represent the observations.
The reported rock types of drillhole include different varieties of migmatitic gneisses
and pegmatite granite (Figure 31). Resistivity is associated on the other hand to FARA
results, and on the other hand together with susceptibility to sulphide content, texture,
and lithology.
Most important correlation of tomogram features is expected to associate with
resistivity logging data. Also the radar velocity and amplitude attenuation are
correlating to these locations. It is known that conductive zones are linked also to higher
susceptibility in Olkiluoto (sulphide minerals). In some cases there are connections of
conductivity in the tomogram to the acoustic logging data, and this way possibly to
density, which are on the other hand directly linked to seismic reflection data. Lower
density values are usually associated to pegmatite veins, but in some cases also narrow
distinct fracture zones.

59
Table 3. Comparison of tomographic reconstruction to OL-KR4 data.
Depth
section
in OL-
KR4
FARA
observation
Lithology Deformation Geophysical logging
200-330 Conductive DGN Fracturing
associated to
conductivity.
BFZ at 315 m.
Dominant
orientations
gentle.
Conductive, not magnetic. At
200-280 m low radar amplitude
and velocity. Narrow sections of
acoustic velocity minima (310-
320), possible reflectors.
330-450 Conductive MGN,
small
DGN, PGR
and VGN
parts
Fracturing
associated to
conductivity.
Dominant
orientations
gentle.
Conductive.
Magnetic.
Higher density.
Very low radar velocity and
amplitude.
Narrow sections of acoustic
velocity minima (370-380).
Increasing salinity indicated in
fluid resistivity.
450-490 Resistive VGN,
partly PGR
Dips gentle to
east. Increased
fracturing
increases the
conductivity only
slightly.
Hydraulic
conductivity.
Resistive. High radar velocity
and amplitude.
490-495 Conductive VGN,
partly PGR
Sulphides. Conductive. Magnetic.
Radar attenuation.
.
495-530 Conductive VGN,
partly PGR
Pervasive
kaolinite and illite
alteration, steep
dips to SW.
Slighly decreased resistivity.
Radar attenuation. Distinct
sonic velocity minimum at 510-
530 m, possible reflector
530-650 Resistive VGN,
partly PGR
Moderate, steep
dips to S-SE.
Fracture
frequency and
conductivity
poorly associated.
Resistive. Radar amplitude and
velocity high (110-120 m/µs).
Minor conductive locations
seen, alternating sonic velocities
at 570-620 m
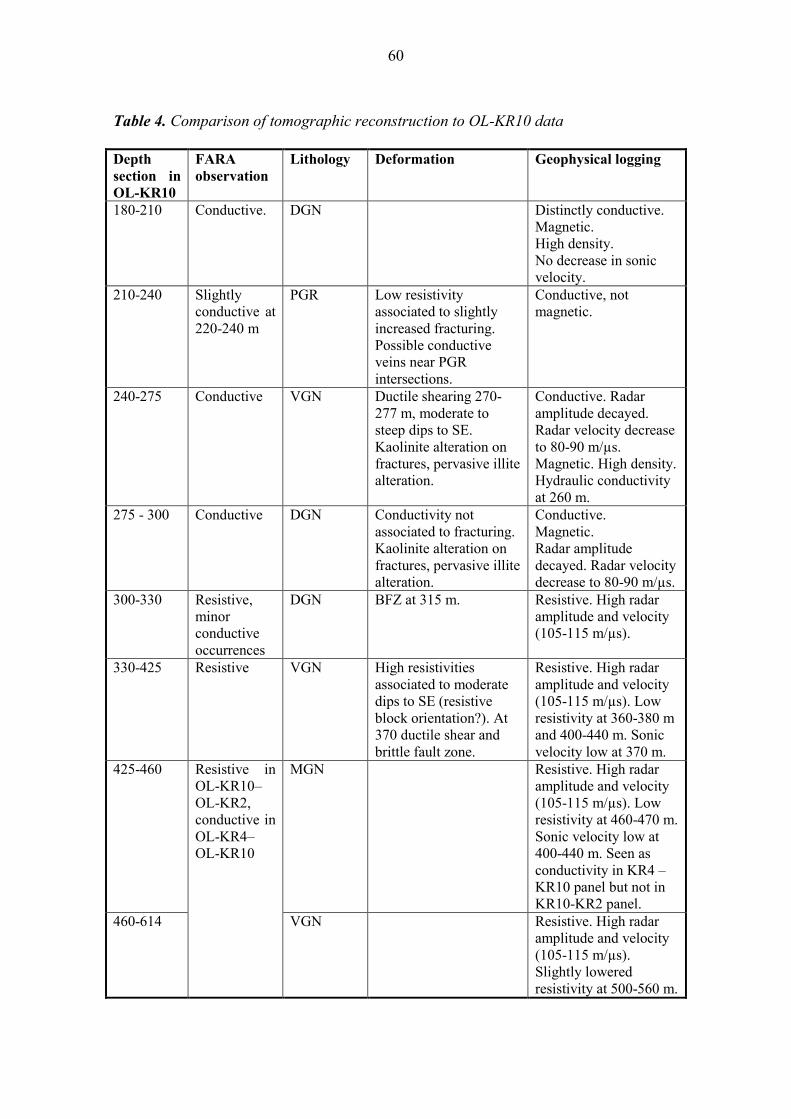
60
Table 4. Comparison of tomographic reconstruction to OL-KR10 data
Depth
section in
OL-KR10
FARA
observation
Lithology Deformation Geophysical logging
180-210 Conductive. DGN Distinctly conductive.
Magnetic.
High density.
No decrease in sonic
velocity.
210-240 Slightly
conductive at
220-240 m
PGR Low resistivity
associated to slightly
increased fracturing.
Possible conductive
veins near PGR
intersections.
Conductive, not
magnetic.
240-275 Conductive VGN Ductile shearing 270-
277 m, moderate to
steep dips to SE.
Kaolinite alteration on
fractures, pervasive illite
alteration.
Conductive. Radar
amplitude decayed.
Radar velocity decrease
to 80-90 m/µs.
Magnetic. High density.
Hydraulic conductivity
at 260 m.
275 - 300 Conductive DGN Conductivity not
associated to fracturing.
Kaolinite alteration on
fractures, pervasive illite
alteration.
Conductive.
Magnetic.
Radar amplitude
decayed. Radar velocity
decrease to 80-90 m/µs.
300-330 Resistive,
minor
conductive
occurrences
DGN BFZ at 315 m. Resistive. High radar
amplitude and velocity
(105-115 m/µs).
330-425 Resistive VGN High resistivities
associated to moderate
dips to SE (resistive
block orientation?). At
370 ductile shear and
brittle fault zone.
Resistive. High radar
amplitude and velocity
(105-115 m/µs). Low
resistivity at 360-380 m
and 400-440 m. Sonic
velocity low at 370 m.
425-460 Resistive in
OL-KR10–
OL-KR2,
conductive in
OL-KR4–
OL-KR10
MGN Resistive. High radar
amplitude and velocity
(105-115 m/µs). Low
resistivity at 460-470 m.
Sonic velocity low at
400-440 m. Seen as
conductivity in KR4 –
KR10 panel but not in
KR10-KR2 panel.
460-614 VGN Resistive. High radar
amplitude and velocity
(105-115 m/µs).
Slightly lowered
resistivity at 500-560 m.

61
Table 5. Comparison of tomographic reconstruction to OL-KR14 data (radar not
measured; FARA measurement did not use OL-KR14).
Depth
section in
OL-KR4
FARA
observation
Lithology Deformation Geophysical
logging
220-275 Conductive VGN Conductivity not
associated to fracturing,
unless associated to 185
m zone.
Conductive,
several narrow
layers. Magnetic.
High density. No
significant sonic
anomalies.
275-325 Resistive, slight
decrease.
PGR Moderate dips to south.
slight increase in
fracturing. Hydraulic
conductivity.
Resistive.
325-350 Resistive VGN Fractured, illite and
kaolinite on fractures.
Resistive. Minor
conductive
indication at 320-
340 m. Low sonic
velocity. Low
density. Low
susceptibility.
350 Slightly
decreased
resistivity
MFGN Not associated to
fracturing.
Resistive
350-370 Resistive PGR Moderate dips to SE,
possible orientation of
resistive block.
Below 440 m brittle
faults, kaolinite and
illite on fractures.
Resistive. Below
440 m slight
decrease in sonic
and resistivity, not
seen in tomogram.
370-440 Very resistive TGG
440-514 Resistive VGN/PGR

62
Figure 31. Drillhole OL-KR4, OL-KR10, OL-KR14 and OL-KR2 lithological profiles,
along with FARA tomographic images of 625 kHz, long normal resistivity and
susceptibility. For resistivity legend, see Figure 27.

63
Table 6. Comparison of tomographic reconstruction to OL-KR2 data.
Depth
section in
OL-KR2
FARA
observation
Lithology Deformation Geophysical logging
190-215 Resistive VGN Moderately
fractured.
Resistive. Sligthly
reduced sonic velocity
and radar amplitude.
215-250 Conductive MGN/PGR Increased fractur-
ing, pervasive
kaolinite alteration,
few BFZs.
Orientations gentle-
moderate to S-SW.
Wide minimum in
resistivity and sonic
velocity. May associate
to VSP reflector. Radar
amplitude reduced.
250-300 Resistive VGN/DGN Non fractured.
Foliation 40-50
degs to south,
possible orientation
of resistive block.
Very resistive. Radar
velocity minimum at
260 m. Low
susceptibility. High
sonic velocity. Small
zone at 290 m.
300-400 Very resistive.
Minor decrease
at 290-330 m.
TGG Very resistive. Small
zones at 315 and 330 m.
Distinct and continuous
radar reflector at bottom
of the section (mafic
vein at 393 m).
400-425 Resistive VGN Slightly increased
fracturing, gentle
dips.
Resistive, resistivity,
radar amplitude and
sonic velocity
alternating. 425-450 Slight increase in
conductivity.
PGR Illite alteration on
fractures.
450-510 Resistivity
decreases in
tomogram
VGN Locally fracture
frequency in-
creased. Moderate
dips. 467-473 m
DSZ and 481-483
BFZ, pervasive
illite alteration,
BFZ at 504-508 m.
below 510 Increasingly
conductive
DGN Fracturing
increased. At 597-
622 m kaolinite
alteration on
fractures, pervasive
illite alteration,
BFZ at 600-605 m.
Resistivity lowered,
possibly salinity
increases. Susceptibility
increases.
below 580 increasingly
conductive
DGN Conductivity increased.
Susceptibility increased.
Radar velocity and
amplitude decreased.
Sonic velocity
decreased.

64
The reason for high resistivities in OL-KR10–OL-KR2 interval is the tonalitic–
granodioritic–granitic gneiss. The diatexitic and mica gneisses indicate slightly lower
resistivities. The apparent dip of resistive region follows this rock type section and can
be confirmed rather continuous on this basis.
Southward of OL-KR10 the associated rock types changes. Tonalitic–granodioritic–
granitic gneiss is not reported in OL-KR4 and OL-KR10 in greater extents. Between
OL-KR10–OL-KR14 high resistivity is more associated to veined gneiss, and increase
of conductivity may be associated to mica gneiss and diatexitic gneiss occurrences.
Apparent southerly dip of resistive body is maintained. Between OL-KR4–OL-KR10
the same trend is emphasized, but dip of resistive body is steeper in dip. Conductive
rock mass is more associated to mica gneiss and diatexitic gneiss.
Increased fracturing and a ductile shear zone (moderate dips to south) at 490–540 m
cannot be seen at all in OL-KR2–OL-KR10 panel, but apparently is associated to local
higher conductivity in panel OL-KR4–OL-KR10. So apparently this feature has
continuity, or shadowing effect, towards OL-KR4 but not towards OL-KR2.
On general view, resistive blocks do not contain major fracturing domains. Normally
increased fracturing can be seen as slightly increased conductivity, and in some cases as
reported brittle faults (Figure 33, Paulamäki et al 2006). Higher conductivity apparently
is related to larger domains of increased fracturing, but there may be also other reasons
associated to conductivity increase than fractures. These indications may sometimes
associate to ductile shearing.
In OL-KR4, drillhole fluid salinity, and fracture groundwater salinity, start to increase
below 320 m, but apparently this feature cannot be seen in FARA tomogram in OL-
KR4.

65
Figure 32. Drillhole OL-KR4, OL-KR10, OL-KR14 and OL-KR2 lithological profiles,
along with FARA tomographic images of 625 kHz, long normal resistivity and fracture
frequency. OL-KR14 resistivity data seems to have a good correlation on resistivity with
FARA image (drillhole has not been involved in the survey, nor used as constrain).

66
Figure 33. The FARA tomogram of 312.5 kHz, resistivity logging profile, and
geological structure intersections, on the vertical cross section. Some of the gently
dipping zones have a similar apparent trend on the plane as the resistive layer limits
have.
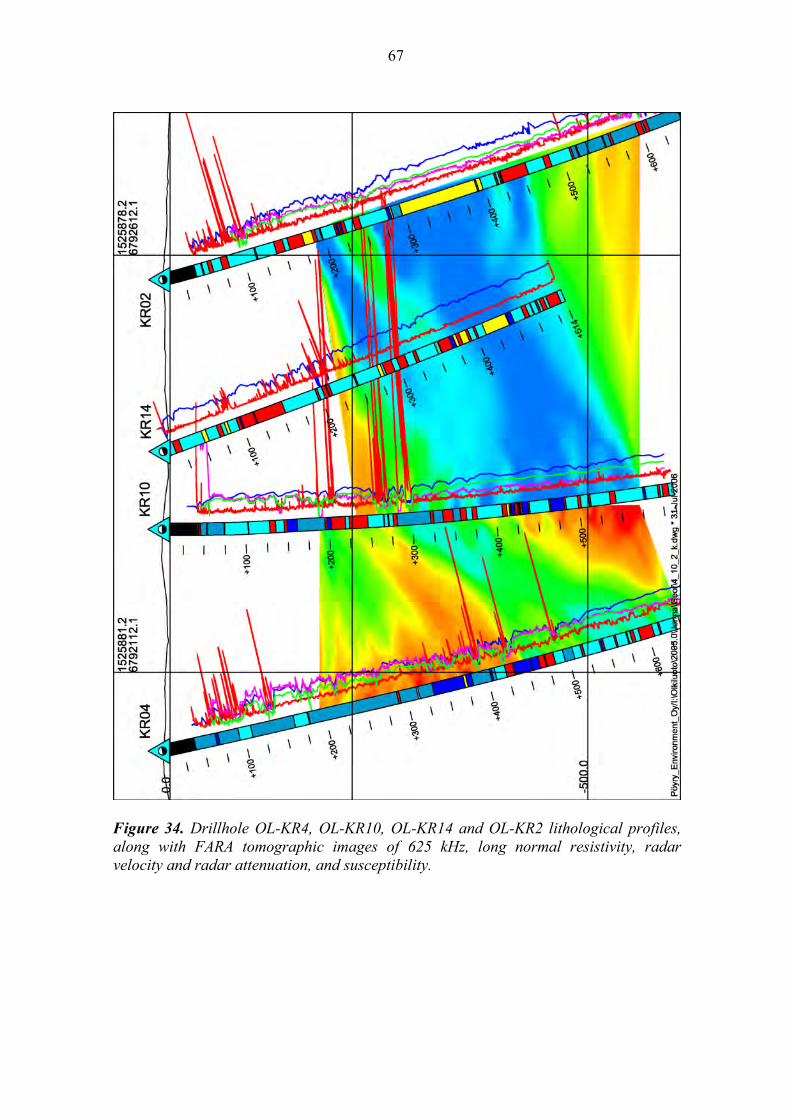
67
Figure 34. Drillhole OL-KR4, OL-KR10, OL-KR14 and OL-KR2 lithological profiles,
along with FARA tomographic images of 625 kHz, long normal resistivity, radar
velocity and radar attenuation, and susceptibility.

68
Figure 35. Drillhole OL-KR4, OL-KR10, OL-KR14 and OL-KR2 lithological profiles,
along with FARA tomographic images of 625 kHz, fracture frequency, gamma–gamma
density and P–wave velocity.

69
7.2.2 Comparisons to electromagnetic sounding results
The electromagnetic SAMPO frequency soundings were performed on ground surface
and interpreted as series of 1D inversion. The rendered image of adjacent inversions (50
m interval) display the upper contact depth for the first distinct conductive layers. The
match of the conductive body at upper part of FARA images and drillhole data shows a
good correspondence.
Figure 36. SAMPO apparent resistivity section from 1–D interpretations of 1995.
Image displays also resistivity regions in FARA image for above 6500–8000 ohm–m
(blue) and below 3000–4000 ohm–m (red), and long normal resistivity images and
curves from drillholes.

70
A cross section submitted by Turo Ahokas, based on interpretations on 1995, will
display at depth level from 200 m in OL-KR4 to 100 m in OL-KR14 a dipping
conductive body, below which one cannot make interpretation with 200 m transmitter–
receiver separation. Upper surface of conductor dips at moderate dip values towards
south.
Figure 37. SAMPO apparent resistivity section from 1–D interpretations of 2005.
Image displays also resistivity regions in FARA image for above 6500–8000 ohm–m
(blue) and below 3000–4000 ohm–m (red), and long normal resistivity images and
curves from drillholes.

71
Towards south, it seems that the conductive body is located upper, being met at some
60–80 m in OL-KR4, as supported by OL-KR4 logging data. Below this layer there
seems to be fairly resistive material on cross section, which should be checked from
other drillholes. Towards north from OL-KR14, higher resistivity at deeper parts of OL-
KR14 seems justified from EM sounding data, and again the sounding stations near OL-
KR2 indicate a strong conductor at 200–210 m supported by logging data, below which
there is no opportunity to investigate using this system.
A revised line interpretation (Paananen et al. 2007) included into electrical model of
Olkiluoto, diplays a more precise location data of the conductive layers. Drillhole data
and resistivity level information have been used in interpretation. The thicknesses of
layers might need to be set narrower. Using drillhole constrains, there can be seen a
layer at 80–120 m depth in KR4 region and south of it, which is horizontal in the
section, or slightly tilting towards the north. The layer steeply bends downwards
between OL-KR4–OL-KR10, being met at 250–300 m depth level in OL-KR10. Then at
300–500 m depth level there are conductors again in OL-KR4, and between these two, a
resistive block. Between OL-KR10 and OL-KR14 the layer from OL-KR10 at 300 m
would reach towards depth OL-200 m in OL-KR14, but on the other hand, some
indications towards northerly dips are still present between OL-KR14 and OL-KR2. A
layer of higher conductivity can be seen in OL-KR2 at 40–120 m, matching well with
drillhole data. FARA images between OL-KR4–OL-KR10 and OL-KR10–OL-KR2 do
not start before a depth of 200 m, but they seem to suggest clearly a bit more southward
dipping structure in the area (except at upper part of OL-KR4, where SAMPO image is
close to FARA result, too). Upper of these SAMPO conductive layers actually is not
imaged until from below the structure, as it is not possible to make measurements closer
to the surface. The apparent difference between the recent SAMPO interpretation and
FARA results could use e.g. drillhole lithology orientation data to resolve. Electrical
model of Olkiluoto (Paananen et al. 2007) would suggest there is a domain containing
conductors in the surface layer, with lower contact dipping moderately (20-40 degrees)
to south, and a rather thick > 200 m resistive (non-conductor containing) domain below
it. Again below this resistive domain, there are conductive layers. This phenomenon is
fully supported by FARA results, confirming the continuity of resistive material
between the drillhole intersections. Also the geophysical model objects merged from
mise-á-la-masse, ground EM, SAMPO and drillhole logging, suggest the FARA data is
fairly consistent.
7.2.3 Comparisons to electrical pole–pole sounding results
Electrical pole–pole soundings were performed on the ground surface and interpreted as
2–D inversion. The interpretation applied the drillhole logging data as constrains, and is
presenting the rather coarse resistivity distribution to a maximum depth of 250–300 m.
Increased conductivity in a layer close to the ground surface (0…80 m) can be seen
from the data. Below that, at 50…150 m level, there is a slightly more resistive region.
The upper surface of more conductive layers at some 200–300 m level can be seen in
results very coarsely, which in turn are seen from below in FARA images. The
conductivity met in OL-KR10 and OL-KR14, and partly in OL-KR2, will support that
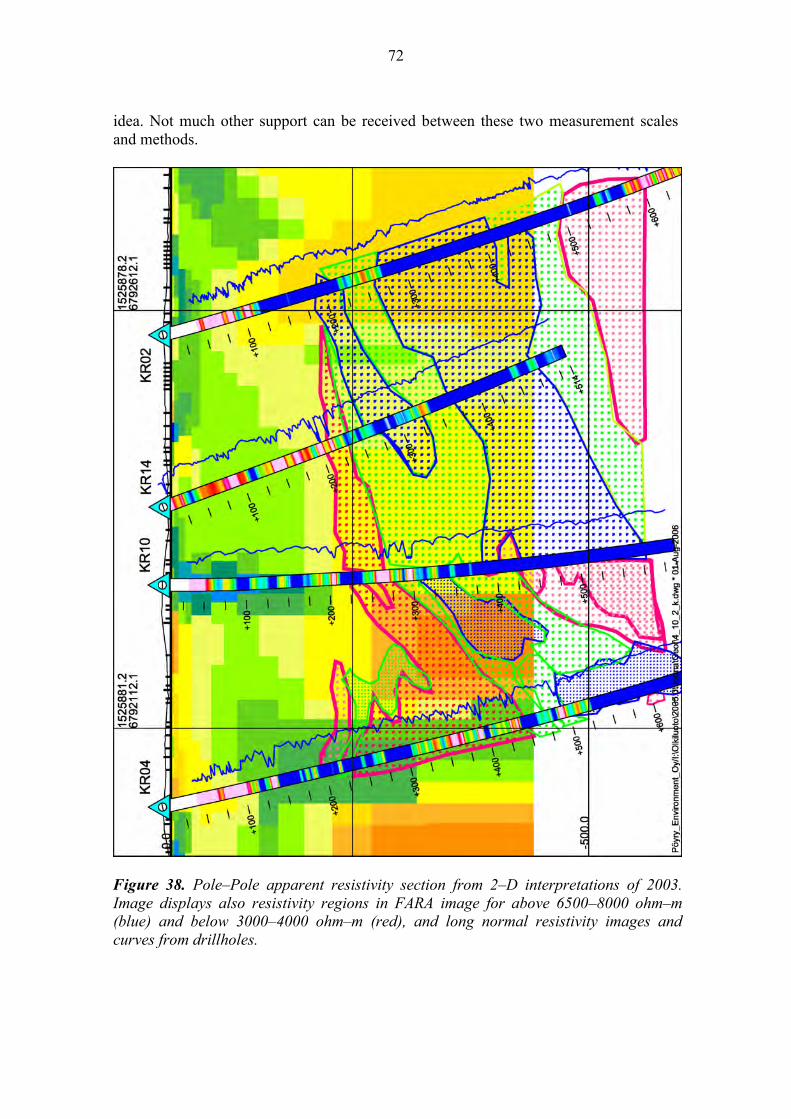
72
idea. Not much other support can be received between these two measurement scales
and methods.
Figure 38. Pole–Pole apparent resistivity section from 2–D interpretations of 2003.
Image displays also resistivity regions in FARA image for above 6500–8000 ohm–m
(blue) and below 3000–4000 ohm–m (red), and long normal resistivity images and
curves from drillholes.

73
7.2.4 Comparison to Mise á la masse results
The results from OL-KR4 mise a la masse current earthing (368 m) potential rendered
from OL-KR24, OL-KR37, OL-KR4, OL-KR30, OL-KR14 and OL-KR2 on same
profile, some interesting results emerge.
Figure 39. a) Mise á la masse image from OL-KR4, 368 m current earthing, b) the
same image added with FARA tomograms (312.5 kHz). Results are clearly of same
origin. FARA is more detailed and will set emphasis for resistive domains, too.

74
The MAM image is fairly smooth, indicating well the domain where the current is
concentrated. FARA would support this image by showing where the resistive domains
are located, and displaying potential conductive locations as shadowing effect locations,
or conductive regions in the tomographic image. Methods are supplementing each other.
7.2.5 Comparison to seismic crosshole tomography and reflector model
The seismic tomogram of OL-KR4–OL-KR10 interval is averaging the evidently
narrow occurrences of low velocities to a rather limited range of velocity variation, just
some 100 m/s below general 5720–5760 m/s level (Figure 40). The velocity minima in
sonic logging fit well together to tomogram (Heikkinen et al. 2004), and the low
velocity zones indicate well also the apparent orientations of the weakness or fracturing
zones.
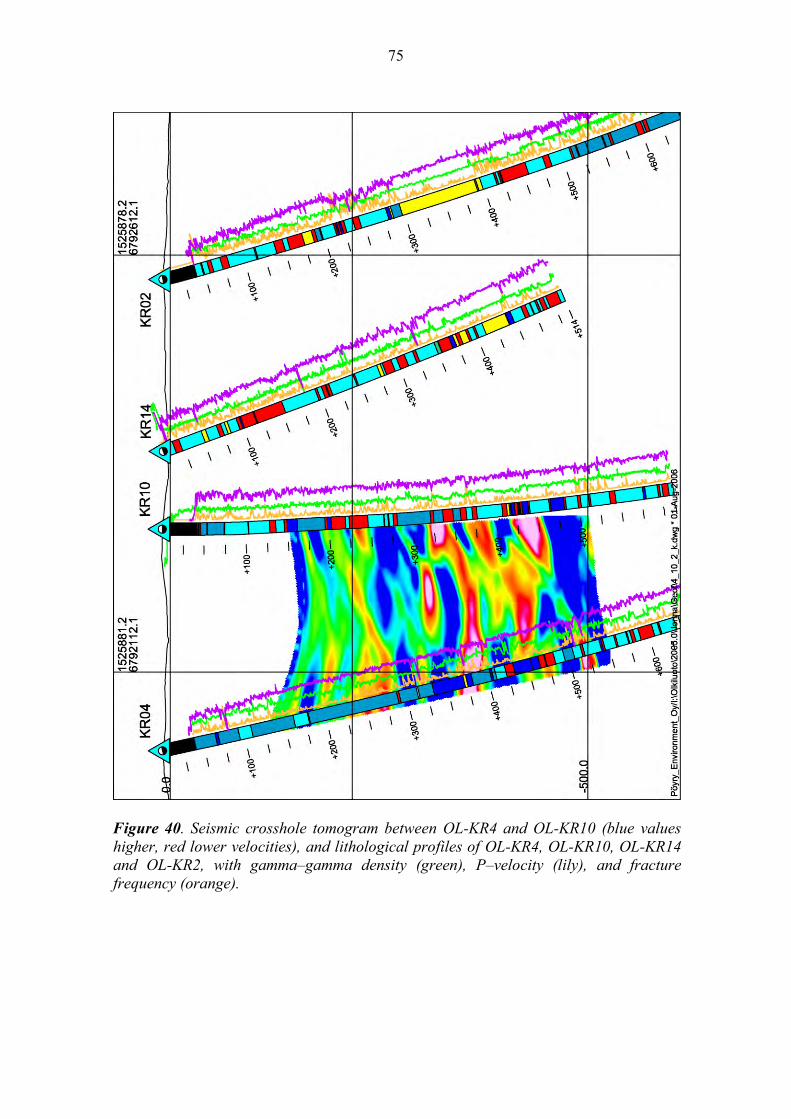
75
Figure 40. Seismic crosshole tomogram between OL-KR4 and OL-KR10 (blue values
higher, red lower velocities), and lithological profiles of OL-KR4, OL-KR10, OL-KR14
and OL-KR2, with gamma–gamma density (green), P–velocity (lily), and fracture
frequency (orange).

76
Figure 41. Seismic 3-D migrated crosshole reflection map from OL-KR4 to OL-KR10,
and lithological profiles of OL-KR4, OL-KR10, OL-KR14 and OL-KR2, with long
normal resistivity (blue), gamma-gamma density (green), P-velocity (lily), and fracture
frequency (orange).
The resistive blocks or their contacts to conductive regions do not fully associate to
seismic low velocity zones or VSP reflectors. Inside the conductive and resistive
regions, there appear slightly differently oriented, cross cutting, and much narrower low
velocity zones, and reflecting surfaces.

77
Between OL-KR4–OL-KR10 the upper contact of resistive body indicates apparent dip
of 30–40 degrees to South. This is supported by a set of VSP reflectors dipping
moderately–steeply to the east (Figure 44). Contrary to this, uppermost low velocity
zone at 350 m depth level has a dip of 12–15 degrees, supported by gently to southeast
dipping reflectors (Figure 45). This set of reflectors support well the gentle dip of upper
contact on tonalite–granodiorite–granite gneiss between OL-KR10–OL-KR14–OL-KR2.
Below this low velocity zone there is a patchy series of zones at steeper apparent dip,
which match better to the resistive area (OL-KR4 at 500 m to KR10 at 350 m), and gets
also support from steeply to southeast dipping features.
Two of the most visible low velocity zones are intersecting the conductive region, and
there is also a higher velocity domain within the conductive zone. At 250 m depth
range, a low velocity zone may coincide with more gently dipping higher conductivity
zone. A low velocity zone at 400–420 m depth level intersects the resistive body at
gentle dip. In some cases these low velocity zones and associated reflectors are seen as
weak and more local low resistivity regions on the FARA tomograms.
The VSP reflectors match well with their orientations to the low velocity zones. There
are some indirect suggestions on displacements (possible subvertical faults) on the
velocity and FARA tomograms. These may receive further support from subvertical
VSP and crosshole reflectors in this drillhole panel.
The subvertical reflection indications (Figure 42) especially towards the west may also
explain the highly variable character of OL-KR4–OL-KR10 and OL-KR10–OL-KR2
drillhole panels in FARA imaging near bottom part of OL-KR10, as well as bending or
terminating conductivity features in FARA results.

78
Figure 42. The FARA tomogram of 625 kHz, velocities in seismic tomogram above
5760 m/s (blue) and below 5730 m/s (red), and possible vertical faulting on basis of
FARA resistivity images and seismic crosshole tomogram. Drillhole lithological profile,
and resistivity, velocity, density and fracture frequency profiles are also shown. Higher
velocity seems to associate to low resistivity. The dips of the velocity variation zones are
more gentle than the resistivity zones.

79
Figure 43. The FARA tomogram of 312.5 kHz, drillhole resistivity images, resistivity
logging profile, and subvertical VSP reflectors dipping to the southwest–west, on the
vertical cross section. These reflectors may represent potential faulting events for
resistivity gently dipping zones.

80
Figure 44. The FARA tomogram of 312.5 kHz, drillhole resistivity images, resistivity
logging profile, and subvertical VSP reflectors dipping to the east or southeast, on the
vertical cross section.
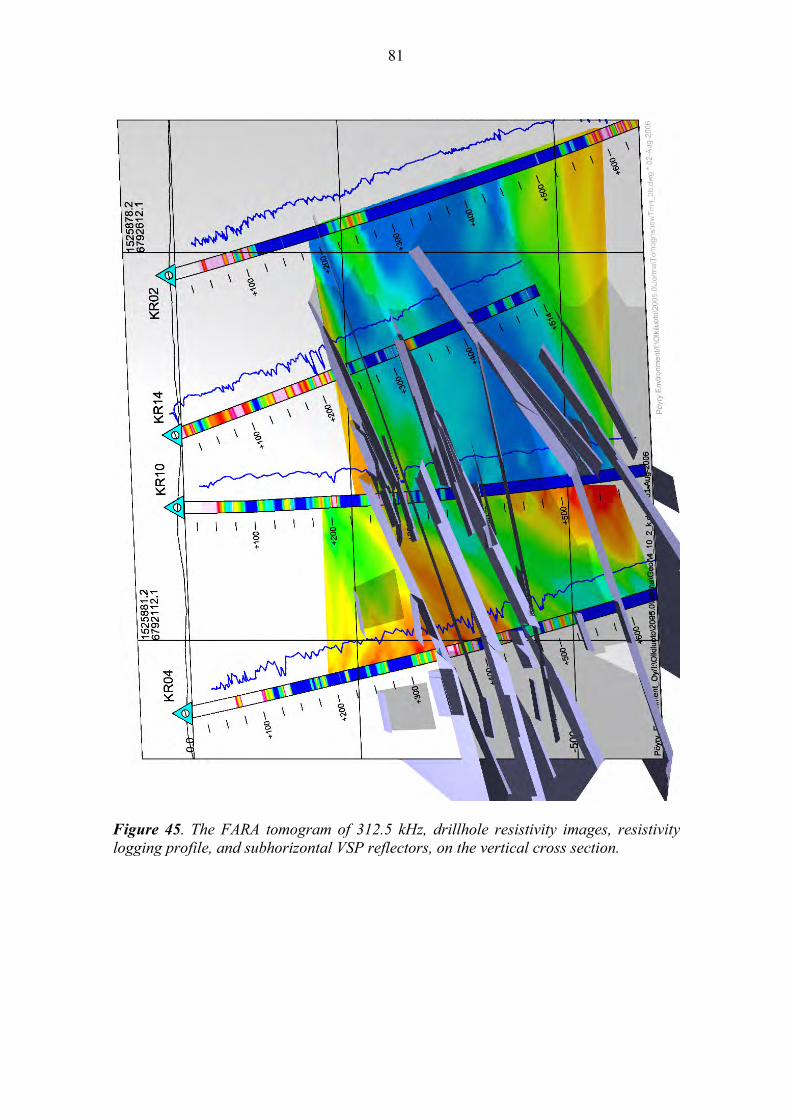
81
Figure 45. The FARA tomogram of 312.5 kHz, drillhole resistivity images, resistivity
logging profile, and subhorizontal VSP reflectors, on the vertical cross section.

82

83
8 DISCUSSION
In October–November 2005, a group of specialists of the FGUNPP «Geologorazvedka»
jointly with the GTK have carried out FARA radio wave imaging in the Olkiluoto site.
Two adjacent drillhole pairs (OL-KR4–OL-KR10 and OL-KR10–OL-KR2) were
surveyed at depth interval of 200–600 m.
The method uses a full space approximation of electrical dipole field. The resistivity,
100–10000 Ohm.m, and frequency range 312.5–2500 kHz defines the field properties
apply in low Q domain (inverse loss tangent), i.e., diffuse or transition domain rather
than a propagating wave field, which makes some challenges in understanding the
results. For electrical dipole field, survey operates in sense of wavenumber vs. drillhole
distance range in intermediate to far field domain. For this reason the tangential
electrical component can be applied, and fair approximation of linear attenuation over
distance is made for computing tomographic reconstruction. Attenuation is correlated
well to electrical conductivity in this transition domain between diffuse and propagating
field. Linearity of attenuation, and geometric concerns of diffuse field detecting also off
plane conductors, need to be taken into account in interpretation.
Processing and preliminary interpretation of the measurement results were performed
during 1–2 days after their completion, the results being given in the present report. The
presence of some lower resistivity zones, and a resistive domain, in the crosshole space
has been detected, and their apparent shape and orientation in the sections were defined.
The positions of the targets, obtained in the two tomographic sections, are in agreement
with each other.
The measurement geometry was not optimal for full tomographic survey resulting from
long distances between the drillholes and too short winch cables limiting the depth of
scan. Now the maximum survey depth was restricted to 600 meters. Longer cables
should have made it possible to detect deeper parts of the drillholes.
It should had been better to use much shorter transmitter step size ( 5 m) so the ray
density would have become higher and the resolution better. Also shorter steps size
would have offered an excellent possibility to investigate the function of the step size to
the reconstruction of the drillhole sections. Simultaneously it could have been possible
to consider the effects of different cell sizes better. Higher transmitter density would
also help in rejecting of spurious data.
Lower two frequencies, 312.5 kHz and 625 kHz can be applied to drillhole distances of
400–500 m in the area. The higher 1250 kHz frequency can be used at distances 200–
300 m, but the highest 2500 kHz does not penetrate through in Olkiluoto moderate
conductivity domain and drillhole distances compared to noise level. Further studies
should focus on two lowest frequencies.
High and moderate resistivity contrasts can be mapped. Tool is rather fast to apply and
technique is feasible for crosshole electromagnetic characterization. Spatial resolution is
better and application faster than with resistivity crosshole imaging, and the distance
range of investigation larger than 30–50 m at 20 MHz obtainable with crosshole radar

84
(which is also slower to apply). On contrary, crosshole radar would provide velocity
data controlled by dielectric permittivity, associated to water content and lithology,
whereas a trade-off of FARA compared to radar is, that the arrival time measurement
for dielectric permittivity (relevant for lithology mapping) is not available, and would
not be even quite valid for diffuse field solution. Phase difference data of FARA
contains information on slowness, which has been applied for dielectric permittivity
estimate (Redko et al. 2000, Stevens et al 1998).
Obtained raw data is very noisy. The effect of noise is partly due to high
electromagnetic noise level due to power lines, partly due to low signal to noise ratio.
Receiver station over sampling and rejection of spurious values (by rejection and
average filtering of scans) and smoothing inversion method with application of drillhole
resistivity logging constrain will allow compilation of reasonably smooth tomographic
images.
The results have been well comparable with drillhole resistivity logging. The resistivity
level in final images has been strongly supported by drillhole resistivity logging data.
Source term computing (regression based) before normalisation of attenuation will also
affect to the level of results.
FARA shadowing method displays the resistive parts of bedrock and correlates well
both with resistive and conductive drillhole indications in logging data. Resistive bodies
indicate very solid, non–fractured rock mass with minor content of conductive minerals.
The conductive part of rock mass indicates in some cases increase of fracturing, but
more importantly a region where ductile deformation has increased amount of
sulphides. These locations and their orientation can be recognised from drillhole logs.
The previous electromagnetic and electrical sounding interpretations from ground
surface support the observations of FARA, but cannot reach the level of detaility.
The seismic reflection and crosshole data indicates, that actual low velocity zones do
not always correlate to the conductive zones, so the reflections may well originate also
from density and velocity contrasts towards higher density and velocity, i.e. contact
between non–conducting granite of low density and moderate or high velocity, and
sheared thus weaker mica gneiss or diatexitic gneiss with low velocity and high density,
higher conductivity due to sulphides and graphite aligned with foliation.
The gently dipping VSP reflectors can meet the fractured contacts between highest
resistivity blocks and gneiss sections, and their extensions further to other rock types;
local orientation of reflectors indicating the specific orientation in rock mass units. The
steeply to East–Southeast dipping reflectors at least partly indicate contacts of higher
conductivity (high acoustic impedance), which may not be actually a fractured part of
rock but e.g. sheared alteration zone, and steeply to west–Southwest dipping reflectors,
at OL-KR4–OL-KR10 section, indicate displacements between the more continuous
and gently dipping lithological units.
Observed low and high resistivity domains can be explained with lithological variation
and location of sulphide bearing domains, seen e.g. in resistivity and susceptibility
logging. Results are of different scale and view than ground level electrical or

85
electromagnetic sounding models from the same profile, or the mise–á–la–masse results
from the same drillhole section. The parameters are different to those obtained in
seismic crosshole imaging or seismic reflection survey. Still much similar geometric
features have been observed. Each of the methods (electromagnetic or seismic,
reflection or transmission) describe the volume on basis of different parameters, and the
results will supplement each another.
FARA method proved useful to map and detect resistive body connections between
drillholes, and to lineate some of more continuous conductive bodies. Higher transmitter
station density, 5–10 m is recommended instead of 20–70 m now applied, with a cost of
slow down of field survey. Receiver station spacing 0.5 m is quite ok. Other drillhole
pairs than now measured OL-KR4–OL-KR10 and OL-KR10–OL-KR2 would be useful
to select. Requirement for drillhole survey panel is the location roughly on common
plane, minimum starting depth at 100–200 m below ground surface, panel vertical
length longer than distance between drillholes, and maximum distances between
drillholes 300–400 m. A 30–50 degrees scan aperture is necessary to produce to make a
good tomographic reconstruction.
Reconstruction would greatly benefit from obtaining a more accurate and certain
drillhole deviation data. The depth errors in FARA recording data should preferably be
compensated before inversion. Conductivity anomaly met in deep part of OL-KR10,
which does not match to the drillhole logging data, may emerge from error in deviation
profile leading to erroneous normalisation, from error in initial field strength definition,
or the feature may be a real off-plane or blind (non-intersected) conductor, caused by
sulphide layer or e.g. saline groundwater in bedrock.
It is possible to apply phase difference in extracting dielectric permittivity information.
In current survey the phase difference unit was not working in a proper way so phase
information was not exploited. Generally phase information can only be useful under
complicated geoelectrical conditions–small resistivity differences, rather small length of
tectonically dislocated targets; presence on many dikes at the site, etc. It is yet not
known how well phase information would apply in Olkiluoto and in available
investigation scale. Dielectric permittivity partly governing the phase is varying due to
felsic and mafic lithology domains, and due to groundwater content in bedrock. In large
scale the different bedrock domains are rather large and can be considered
homogeneous. In closer scale the features are strongly heterogeneous and the internal
variation rather detailed.
The radio wave surveying method with the FARA system is promising for studies of the
resistivity variation associated to geological structure of the Olkiluoto site. Objects to be
detected need to be in order of 20–30 m in thickness (very good conductors may be
rather thin if they shadow the field strongly), and continuous in length direction.
Method was proven feasible in crystalline rock investigation, when compared to other
electrical and also to seismic data. Method can provide continuity information between
drillhole intersections. For sulphide layer detection it is providing similar but more
detailed information as mise-á-la-masse method (providing 2D full tomographic
reconstruction), and for resistive layer detection and crosshole follow–up it is probably

86
an only available reliable technique, perhaps together with slower electrical resistivity
tomography (ERT). Interpretation would benefit from numerical inverse modelling, e.g.
in 2D, for which a computing method would be necessary to develop.

87
REFERENCES
Carlsten, S. 1990. Borehole radar measurements at Olkiluoto, boreholes KR1, KR2 and
KR3. TVO Working Report 90–27, 26 p.
Carlsten, S. 1991. Borehole radar measurements at Olkiluoto, boreholes KR4 and KR5.
TVO Working Report 91–02, 23 p.
Carlsten, S. 1996a. Detailed borehole radar measurements at the Olkiluoto site. Posiva,
Working Report PATU–96–03e, 59 p.
Carlsten, S. 1996b. Detailed borehole radar measurements at the Olkiluoto site. Posiva
Working Report PATU–96–54e, 34 p.
Enescu, N., Cosma, C. &, Balu, L. 2004. Reflection seismics using drillholes at
Olkiluoto in 2003–from investigation design to result validation. Volume 1. Posiva
working report 2004–62, 150 p.
Heikkinen, E. Vaittinen, T., Saksa, P., Palmén, J. & Nummela, J. 2004. Reflection
seismics using drillholes at Olkiluoto in 2003–from investigation design to result
validation. Volume 2. Posiva working report 2004–62, 150 p.
Heikkinen, E., Ahokas, T., Saksa, P. 2004. Interpretation of Olkiluoto electromagnetic
Gefinex 400S soundings and pole–pole electrical soundings. Posiva Working Report
2004–16, 180 p.
Julkunen, A., Kallio, L. & Hassinen, P. 1995. Geophysical logging in Olkiluoto,
drillholes OL-KR2, OL-KR3, OL-KR4, OL-KR6, OL-KR7 and OL-KR8. TVO
Working Report PATU–95–71, 112 p (in Finnish).
Korpisalo, A. 2005. Radio imaging surveys with FARA equipment: Crosshole surveys
in drillhole sections OL-KR4–OL-KR10 and OL-KR10–OL-KR2 in Olkiluoto with
FARA in 2005, GTK Q16.1/2005/1. Geological Survey of Finland.
Lahti, M., Tammenmaa, J. & Hassinen, P. 2001. Geophysical logging of boreholes
KR13 and KR14 at Olkiluoto, Eurajoki 2001. Posiva Working Report 2001–30, 139 p.
Laurila, T. & Tammenmaa, J. 1996. Geophysical drillhole measurements in Olkiluoto,
1996, drillhole OL-KR10. Posiva Working Report PATU–96–14, 40 p (in Finnish).
Lehtonen, T. 2006. Visualisation and interpretation of the year 2004 mise–á–la–masse
survey data at Olkiluoto site. Posiva Working Report 2006–08, 118 p.
Paananen, M., Lehtonen, T., Korhonen, K. 2007. Electrical model of Olkiluoto. Posiva
Working Report 2007–49, 99 p.

88
Paulamäki, S., Paananen, M., Gehör, S., Kärki, A., Front, K., Aaltonen, I., Ahokas, T.,
Kemppainen, K., Mattila, J., Wikström, L. 2006. Geological Model of the Olkiluoto
Site, Version 0. Posiva Working Report 2006–37, 335 p.
Redko, G.V., Lebedkin, L.V., Shuval–Sergeev, A.N., Stevens, K. & Kazda, G. 2000.
Borehole electromagnetic geophysical methods in ore and coal deposits. A paper at the
International Conference "300 years of Russian mine–geological service", Saint–
Petersburg (Russia), 2000.
Saksa, P., Hellä, P., Lehtimäki, T., Heikkinen, E. & Karanko, A. 2001. On performance
of borehole radar method. Posiva Working Report 2001–35, 134 p (in Finnish).
Suomen Malmi Oy. 1989. Geophysical drillhole logging in Olkiluoto, drillholes OL-
KR2 and OL-KR3. TVO Working Report 89–88, 9 p (in Finnish).
Suomen Malmi Oy. 1990. Geophysical drillhole logging in Olkiluoto, drillholes OL-
KR4 and OL-KR5. TVO Working Report 90–44, 9 p (in Finnish).
Stevens, K., Watts, A. & Redko, G. 1998. In–Mine Applications of the Radio–Wave
Method in the Sudbury Igneous Complex. A paper at the International Conference
"Mine Geophysics–98", Saint Petersburg (Russia).