Embed Size (px)
DESCRIPTION
CSE 522 Real-Time Scheduling (1) . Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann -Hang Lee [email protected] (480) 727-7507. Event and Time-Driven Threads. Create a task with (name, priority, options, stacksize , main, …). initialization. - PowerPoint PPT Presentation
Citation preview

1
CSE 522 Real-Time Scheduling (1)
Computer Science & Engineering DepartmentArizona State University
Tempe, AZ 85287
Dr. Yann-Hang [email protected](480) 727-7507

2
Event and Time-Driven Threads
Create a task with (name, priority, options, stacksize, main, …)
initialization
external trigger?
Take actions andchange system
state
ISR: to set/clear events
start_time=time( )
Task initialization
computation
Sleep(period - ( time( ) -start_time) )

3
Multiple Events in One Threadvoid compute(){
if (event1) then action1;if (event2) then action2;if (event3) then action3;
.}
or{
for (i=0, i<n, i++)if event[i] then action[i];
}
void compute(){
if (event1) then action1;else if (event2) then action2;else if (event3) then action3;
.}
or{
for (i=0, i<n, i++) {if event[i] then { action[i]; break; } }
}

4
Real-time System Specification
Logical correctness requirements: The computation produces correct outputs. Models of computation to describe inputs and computations Additional requirements on resource, security, reliability, etc. Finite state machine
good for control logic and protocols, transition and activity
Data flow – modular computations that are triggered by the availability of input data.
Temporal correctness requirements: The computation produces outputs at the right time When the computation can get started and should be
completed

Specification Patterns
Category Pattern Example
Duration(stimuli and responses)
minimum duration
The system has a minimum 'off' period of 120seconds before it reenters the cranking mode.
maximum duration
The system can only operate in engine cranking mode for no longer than 10 seconds at one time
Periodic bounded recurrence
The ABS controller checks for wheel skidding every 10 milliseconds.")
Real-time order
bounded response
The detection of and response to rapid deceleration must occur within 0.015 seconds.
bounded invariance
If Error 502 is received, then the braking systemis inhibited for 10 seconds.
(S. Konrad and B.H.C. Cheng “Real-time specification patterns”, ICSE 2005)
5

6
RT Specification in FSM
Duration of staying in a state Periodic activity in a state Bounded response for each
transition Accumulated delay between
multiple transitions Hierarchical FSM
a state encloses a FSM enter a state activate a FSM
Concurrent FSM FSMs run in parallel (active
simultaneously)
up
down
idle open

7
RT Embedded Systems: Terminology Some problem terms:
job, task, process, activity, action, procedure, event, time, deadline, latency, slack time, execution time, aperiodic, sporadic, jitter, priority
Job: unit of work that is scheduled and executed in the system control law computation, send a packet, read sensor data
Task: set of jobs Processor: CPU + Bus + I/O Time (instant) and duration (interval) Release time, completion time, deadline (absolute or
relative)

8
Terminology
Hard deadline: late result is little or no value, or may lead to disaster need to validate (can you guarantee it?)
Soft deadline: late result may still be useful probability of missing deadlines 95% of telephone switch connects in 10 seconds
How serious is serious ? Tardiness:
min{ 0, deadline - completion time} Usefulness:
function of tardinesscompletion time
value

9
Terminology: Temporal Parameters
Release time: fixed ( r ), jitter [ r-, r+ ], sporadic or aperiodic
Execution time: uncertainty from memory refresh, contention due to DMA,
cache misses, interrupts, OS overhead execution path variations
WCET: a “deterministic” parameter for the worst-case execution time a conservative measure an assumption to make scheduling and validation easier how can you measure the WCET of a job?

10
Task Model
Periodic task Ti: (examples ??) constant (or bounded) period, pi: inter-release time between
two consecutive jobs phase i, utilization i = ei / pi, deadline (relative) Di
Aperiodic and sporadic: (examples ??) uncertain interarrival times but with a minimum separation aperiodic: with a soft or no deadline sporadic: with a hard deadline
i i+pi i+3pii+2pi
ei
Di

11
waiting
executing
ready
blocked suspendeddispatched
wake-up
Task Functional Parameters Preemptivity: suspend the executing job and switch to the
other one should a job (or a portion of job) be preemptable context switch: save the current process status (PC, registers, etc.)
and initiate a ready job transmit a UDP package, write a block of data to disk, a busy waiting
loop Preemptivity of resources: concurrent use of resources or
critical section lock, semaphore, disable interrupts
How can a context switch be triggered? Assume you want to preempt an
executing job -- why a higher priority job arrives run out the time quantum

12
Task Scheduling Schedule: to determine which job is assigned to a
processor at any time valid schedule: satisfies constraints (release time, WCET,
precedence, etc.) feasible schedule: meet job deadlines
Need an algorithm to generate a schedule optimal scheduling algorithm: always find a feasible schedule
if and only if a feasible schedule exists Scheduler or dispatcher: the mechanism to
implement a schedule

13
Clock-driven a schedule determines (off-line) which job to be executed at each
instant static or cyclic predicable and deterministic scheduler: invoked by a timer multiple tables for different operation modes
Task Scheduling
p1= 6, e1= 3, d1= 6p2= 8, e2= 3, d2= 8 Major cycle = lcm (6,8) = 24

14
Weighted Round-robin interleave job executions allocate a time slice to each job in the FIFO queue time slice may vary while sharing the processor good for pipelined jobs
Task Scheduling
p1= 6, e1= 3, d1= 6p2= 8, e2= 3, d2= 8 Major cycle = lcm (6,8) = 24

15
Priority-driven The highest-priority job gets to run until completion or blocked processor never idle if jobs are waiting (work conserving) preemptive or nonpreemptive priority assignment can be static or dynamic scheduler just look at the priority queue for waiting jobs (list schedule)
Task Scheduling
p1= 6, e1= 3, d1= 6p2= 8, e2= 3, d2= 8 Major cycle = lcm (6,8) = 24

16
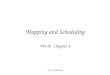
dk di
JkJi
rk ( rk )
dk di
JkJk Ji
(non-EDF)
(EDF)
Earliest-deadline First (EDF) Schedule Priority preemptive scheduling
a job with earliest (absolute) deadline has the highest priority does not require the knowledge of execution time
Optimal if single processor, no resource contention, preemption why it is optimal: assume a feasible schedule

17
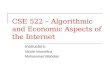
Least Slack Time (LST) Schedule
Priority preemptive scheduling based on slack (laxity) time ( di - ei
* ) schedule instants: when jobs are released or completed. optimal for preemptive single processor schedule
J1
J2
J3
Slacktime
LST

18
Non-preemptive or multiple processors scheduling anomaly --- the schedule fails after we reduce job
execution times
Non-optimality of EDF
T1
T2
T3
D1 D2 D3
Missed deadline
idle
( all jobs meet their deadline under EDF after increasing e1 )

19
Predicable System With variant job execution times, do we know when a task is
started or completed? If the start time and completion time are predicable, then we
can determine whether a schedule is feasible or not Two extreme condition:
maximal schedule: all jobs take their maximal execution times minimal schedule: all jobs take their minimal execution times
A job is predicable iff its start time and complete time are predicable: s- ( Ji ) s ( Ji ) s+ ( Ji ) f - ( Ji ) f ( Ji ) f+ ( Ji )
The execution of every job in a set of independent, preemptive jobs with fixed release time is predictable when scheduled in a priority-driven manner on one processor (proved by induction)

20
On-line vs. Off-line Scheduling Off-line scheduling: the schedule is computed off-line and is
based on the knowledge of the release times and execution times of all jobs. For deterministic systems: with fixed set of functions and job
characteristics does not vary or vary only slightly. On-line scheduling: a scheduler makes each scheduling
decision without knowledge about the jobs that will be released in the future. there is no optimal on-line schedule if jobs are non-preemptive when a job is released, the system can serve it or wait for the future jobs
r1 r2 D2D1
r1 r3 D1 and D3
( should wait for J2 )
( should begin J1 )J1 J3
J2 J1

21
Clock-Driven Scheduling Assumption:
system must be deterministic (with few aperiodic or sporadic jobs) periodic tasks ( I , pi, ei, Di )
Cyclic schedule: ( tk, T(tk) ) -- at instance tk, run task set T(tk) or idle
Scheduler: Need a major cycle A table with entries for all tk in major cycle Timer interrupts at tk.
An example: T1 =(4,1), T2 = (5,1.8), T3 = (20,1), T4 = (20,2) hyperperiod (major cycle) = 20
T1 T3 T2 T1 T4 T2 T1 T2 T1 T1 T2

22
0 10 20 30 40 50 60
Major and Minor Cycle Model Time is divided into equal-sized frame
minor cycle = length of frame Major cycle = length of schedule = k * minor_cycle
An example: A=(10,4) B=(20,6) C=(30,5) major cycle=60, minor cycle=10 scheduling string AB_AC_AB_AC_AB_A_
Jobs must be done within a minor cycle limit timing error to one frame suspend and resume as background, continue, or abort if overrun

23
Determination of Minor Cycle (frame)
Major cycle: H = LCM ( pi ) Frame: f devides H Tasks can be done within one minor cycle --- f ei
There is at least one minor cycle between release time and deadline assume a frame starts at t task arrives at t’ t with a deadline D to have time for execution in the second frame, we need t + 2f t’ + D since t’ - t gcd ( f, pi ), we have a sufficient condition 2f - gcd ( f, pi )
Di
t t+f t+2ft’ t’+D

24
Examples of Major/Minor Cyclic Scheduling
Three tasks (15, 1, 14) (20, 2, 26) and (22,3) H = 660 , f 3, and f = 3, 4, 5, 10, or 11 f can not too big since 2f - gcd(….) 14 f can be 3, 4, and 5
Three tasks (4, 1) (5, 2, 7) and (20, 5) H=20, f 5, but f 4 job slices: divide the 3rd task to (20, 1) (20, 3) and (20, 1) f can be 4
T1 T2 T3,,1 T1 T3,2 T1 T2 T3,3 T1 T2 T1 T2

25
Examples of Major/Minor Cyclic Scheduling
Two tasks (100, 20) and (75, 15) choose f=25
run 1st task in high frequency (period =75)
run 2nd task in higher frequency (period =50)
harmonic set of periods

26
An Example A1 must be done at least every 10ms, and takes 1ms A2 must be completed with 5ms when E occurs and
takes 2 ms E must be detected by polling and is detectable for at
least 0.5 ms
E would not occur twice within 50 ms polling of E takes 0 overhead
0.5ms

27
Major/Minor Cyclic Scheduling There should be a periodic polling action for E Assume a timer of 0.5ms to activate polling operation and no polling
overhead Should be an interval of 2ms to execute A2 for an arbitrary 5ms interval
May detect E in the first frame and execute A2 in the second frame period=2.5ms
A2 takes 2ms if E, otherwise is 0 WCET=2ms Should be an interval of 1ms to execute A1 for an arbitrary 10ms
interval Period= 10ms, WCET= 1ms Since 2ms + 1ms > 2.5ms, we will divide A1 into two parts of 0.5ms
A2 A1_1 A2 A1_2 A2 A2 A2 A1_1 A2 A1_2 A2 A2

28
Algorithm to Find Major/Minor Cyclic Schedule
Assume tasks can be sliced (or preemptable) choose f that divides H and 2f - gcd ( f, pi ) Di
For each f, construct a network flow diagram a source and a sink a vertex for each job Ji,j(task instance) and an edge from the
source with a capacity ei
a vertex for each frame fk and an edge from each frame to the sink with a capacity f
if Ji,j can be scheduled in fk, add an edge between the vertices with a capacity f
Find the maximal flow from the source to the sink feasible schedule if the maximal flow equals to the total
execution time

29
source sink
J1,1
f1
Example Three tasks (4, 1) (5, 2, 7) and (20, 5)
H=20, f = 2 or 4

30
Aperiodic Tasks A periodic server follows the cyclic schedule A aperiodic server looks at the aperiodic task queue
runs at the background Slack stealing
slack time: how much each periodic task can be delayed Assume all tasks must be completed before the end of their
frames and aperiodic tasks are not preemptable at frame k, ek is allocated to periodic tasks slack time: s= f - ek at the beginning of frame k, find a aperiodic task j with an execution time
ej that is less than s try to run the other aperiodic task with a slack time: s=s - ej
Do slack stealing at the beginning of each frame and then examine the queue when idle

31
Summary of Cyclic Schedule Pros
simple, table-driven, easy to validate (knows what is doing at any moment)
fit well for harmonic periods and small system variations static schedule deterministic, static resource allocation, no preemption small jitter no scheduling anomalies
Cons difficult to change (need to re-schedule all tasks) fixed released times for the set of tasks difficult to deal with different temporal dependencies schedule algorithm may get complex (NP-hard) doesn’t support aperiodic and sporadic tasks efficiently