-
8/20/2019 Cylinder Cone Metal
1/19
Free vibrational characteristics of isotropic
coupledcylindrical–conical shells
Mauro Caresta , Nicole J. Kessissoglou
School of Mechanical and Manufacturing Engineering, The
University of New South Wales, Sydney NSW 2052, Australia
a r t i c l e i n f o
Article history:
Received 11 March 2009
Received in revised form
29 September 2009
Accepted 4 October 2009
Handling Editor: L.G. ThamAvailable online 28 October 2009
a b s t r a c t
This paper presents the free vibrational characteristics of
isotropic coupled conical–
cylindrical shells. The equations of motion for the cylindrical
and conical shells are
solved using two different methods. A wave solution is used to
describe the
displacements of the cylindrical shell, while the displacements
of the conical sections
are solved using a power series solution. Both Donnell–Mushtari
and Flügge equations
of motion are used and the limitations associated with each thin
shell theory are
discussed. Natural frequencies are presented for different
boundary conditions. The
effect of the boundary conditions and the influence of the
semi-vertex cone angle are
described. The results from the theoretical model presented here
are compared with
those obtained by previous researchers and from a finite element
model.
& 2009 Elsevier Ltd. All rights reserved.
1. Introduction
Cylindrical shells are widely reported in literature. Many
researchers such as Donnell–Mushtari, Timoshenko, Reissner,
Flügge, to name a few, have developed thin shell theory arising
from different simplifying assumptions based on Love’s
postulates. A range of general solutions for the cylindrical
shell displacements and results for different boundary
conditions
have been summarised by Leissa [1]. Conical shells have
not been as widely reported in literature as in the case
of
cylindrical shells. This is due to the increased mathematical
complexity associated with the effect of the variation of the
radius along the length of the cone on the elastic waves. The
approximate location of the natural frequencies for conical
shells has been found using the Rayleigh–Ritz method by several
authors [1–5]. A transfer matrix approach was used by Irie
et al. [6] to solve the free vibration of conical
shells. Tong [7] presented a procedure for the free
vibration analysis of
isotropic and orthotropic conical shells in the form of a power
series. Guo [8] studied the propagation and
radiation
properties of elastic waves in conical shells.
Very little work can be found on the vibrations of coupled
cylindrical–conical shells, of which common applications are
submarine hulls, aircraft, missiles and autonomous underwater
vehicles (AUVs). Early analytical and experimental work to
determine the natural frequencies and mode shapes of coupled
conical–cylindrical shells used the finite element method
[9]. The classic bending theory was used by Kalnins [10]
and Rose et al. [11] to examine rotationally
symmetric shells.
Hu and Raney [12] examined the effects of
discontinuities at the joint connecting the cone and cylinder. A
transfer matrix
approach was used by Irie et al. [13] to solve the
free vibration of coupled cylindrical–conical shells. Efraim and
Eisenberger
[14] applied a power series solution to calculate the
natural frequencies of segmented axisymmetric shells. Patel et
al. [15]
presented results for laminated composite joined
conical–cylindrical shells using a finite element method.
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/jsvi
Journal of Sound and Vibration
ARTICLE IN PRESS
0022-460X/$- see front matter & 2009 Elsevier
Ltd. All rights reserved.doi:10.1016/j.jsv.2009.10.003
Corresponding author.
E-mail address: [email protected] (M. Caresta).
Journal of Sound and Vibration 329 (2010) 733–751
http://-/?-http://www.elsevier.com/locate/jsvihttp://localhost/var/www/apps/conversion/tmp/scratch_2/dx.doi.org/10.1016/j.jsv.2009.10.003mailto:[email protected]:[email protected]://localhost/var/www/apps/conversion/tmp/scratch_2/dx.doi.org/10.1016/j.jsv.2009.10.003http://www.elsevier.com/locate/jsvihttp://-/?-
-
8/20/2019 Cylinder Cone Metal
2/19
In this work, the authors present a different approach to
describe the free vibrational characteristics of coupled
isotropic
cylindrical–conical shells. The equations of motion for the
cylindrical and conical shells are solved using two different
methods. The cylindrical shell equations are solved using a wave
solution while the conical shell equations are solved using
a power series solution. These two methods are merged together
for the first time to describe the dynamic response of the
coupled shells. Two thin shell theories are used corresponding
to Donnell–Mushtari and the higher order equations of
Flügge. In the latter case it is shown that an approximation is
required in order to apply the power series solution for the
conical shell. Results in terms of natural frequencies and mode
shapes are compared with data available in literature. The
effect of the junction between the coupled shells and the
boundary conditions is also investigated.
2. Equations of motion for thin shells
The equations of motion to describe the vibrations of
cylindrical or conical shells can be derived according to a
particular thin shell theory using the standard
derivation [1]. For completeness of the present study, the
derivation of thin
shell theory is briefly reviewed in Appendix A.
2.1. Equations of motion for a cylindrical shell
Using a cylindrical coordinate system
( x, y), u, v and w are the
orthogonal components of the shell displacement in the
axial, circumferential and radial directions, respectively, as
shown in Fig. 1. According to Flügge theory, the
equations of
motion for a thin cylindrical shell are
@2u
@ x2 þ ð1 uÞ
2a2 ð1 þ b2Þ @
2u
@y2 þ ð1 þ uÞ
2a
@2v
@ x @yþ u
a
@w
@ x b2a @
3w
@ x3 þ b2 ð1 uÞ
2a
@3w
@ x @y2 1
c 2L
@2u
@t 2 ¼ 0 (1)
ð1 þ uÞ2a
@2u
@ x @yþ ð1 uÞ
2
@2v
@ x2 þ 1
a2@2v
@y2 þ 1
a2@w
@y þ b2 3ð1 uÞ
2
@2v
@ x2 ð3 uÞ
2
@3w
@ x2 @y
! 1
c 2L
@2v
@t 2 ¼ 0 (2)
b2
a2 @4w
@ x4 þ 2 @
4w
@ x2 @y2 þ 1
a2@4w
@y4 a @
3u
@ x3 þ 1 u
2a
@3u
@ x @y2 ð3 uÞ
2
@3v
@ x2 @yþ 2
a2@2w
@y2
!
þ ua
@u
@ x þ 1
a2@v
@yþ wð1 þ b2Þ
þ 1
c 2L
@2w
@t 2 ¼ 0 (3)
where a is the radius of the middle surface of the
shell, b ¼ h= ffiffiffiffiffiffi12p
a is the thickness parameter, h is the
shell thickness andf ¼ @w=@ x is the
slope. c L ¼ ½E =rð1 u2Þ1=2 is the longitudinal
wave speed. For Donnell–Mushtari theory, the equations
of motion simplify to
@2u
@ x2 þ ð1 uÞ
2a2@2u
@y2 þ ð1 þ uÞ
2a
@2v
@ x @yþ u
a
@w
@ x 1
c 2L
@2u
@t 2 ¼ 0 (4)
ð1 þ uÞ2a
@2u
@ x @yþ ð1 uÞ
2
@2v
@ x2 þ 1
a2@2v
@y2 þ 1
a2@w
@y 1
c 2L
@2v
@t 2 ¼ 0 (5)
b2
a2 @4w
@ x4 þ 2 @
4w
@ x2 @y2 þ 1
a2@4w
@y4
!þ u
a
@u
@ x þ 1
a2@v
@yþ w
a2 þ 1
c 2L
@2w
@t 2 ¼ 0 (6)
ARTICLE IN PRESS
u
θ
w
φ
x
v
Fig. 1. Coordinate system for a thin walled cylindrical
shell.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751734
-
8/20/2019 Cylinder Cone Metal
3/19
2.2. Equations of motion for a conical shell
For a conical shell, the coordinate system
( xc , yc ) is defined in Fig. 2. The
equations of motion are given in terms
of uc and
vc that are the orthogonal components of the
displacement in the
xc and yc directions,
respectively. wc is the displacementnormal to the
shell surface. a is the semi-vertex angle of the cone.
s is the coordinate used in the standard
derivationpresented in Appendix A. R is the radius of
the cone at location xc . R0 is the mean
radius of the shell and corresponds to the
origin of the coordinate system. Lc is the
length of the cone along its generator, and R1, R2
are, respectively, the radii at the
smaller and larger ends of the cone. According to Fl ügge
theory, the equations of motion are
ðL11 þ ~L11Þuc þ L12vc þ
ðL13 þ ~L13Þwc 1c 2cL
@2uc @t 2
¼ 0 (7)
L21uc þ ðL22 þ ~L22Þvc þ
ðL23 þ ~L23Þwc 1c 2cL
@2vc @t 2
¼ 0 (8)
ðL31
þ ~L31
Þuc
þ ðL32
þ ~L32
Þvc
þ ðL33
þ ~L33
Þwc
1
c 2
cL
@2wc
@t 2
¼ 0 (9)
c cL ¼ ½E c =rc ð1 u2c Þ1=2 is the
longitudinal wave
speed. E c , rc and
uc are, respectively, Young’s modulus, density and
Poisson’sratio. Using Donnell–Mushtari theory, the differential
operators ~L ij are zero. The Flügge equations of
motion are more
complicated due to the numerous higher order terms. The
differential operators L ij and ~L ij are
given in Appendix B.
3. Solutions to the equations of motion
The equations of motion for the cylindrical and conical shells
are solved using two different methods, and are then
merged together to provide the complete response of the coupled
conical–cylindrical structure. The cylindrical shell
equations are solved using a wave solution whilst the conical
shell equations are solved using a power series method.
Furthermore, expressions for the conical shell displacements are
obtained for both the Donnell–Mushtari and Flügge
theories.
3.1. General solutions for the cylindrical shell
General solutions to the equations of motion for a cylindrical
shell can be assumed as [1]
uð x; y; t Þ ¼ U e jkn x
cosðnyÞe jot (10)
vð x;y; t Þ ¼ V e jkn x
sinðnyÞe jot (11)
wð x; y; t Þ ¼ W e jkn x
cosðnyÞe jot (12)where kn is the axial
wavenumber and n is the circumferential mode number.
Substituting the general solutions given by
Eqs. (10)–(12) into the Flügge equations of motion given by
Eqs. (1)–(3) results in three linear equations in terms
of U , V and
W . These linear equations can be arranged in matrix form
as AU ¼ 0, where U ¼ ½U V W T
contains the unknown waveamplitudes. The elements of the
matrix A are given in Appendix C. For a non-trivial
solution, the determinant of the matrix A must be zero.
The expanded determinant results in an eighth order characteristic
equation in kn. For each value of
ARTICLE IN PRESS
Lc
R2
uc, x c
wc
R1 R0 R
vc
s
c
Fig. 2. Coordinate system for a thin walled conical
shell.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 735
-
8/20/2019 Cylinder Cone Metal
4/19
kn;i ði ¼ 1 : 8Þ, the axial and
circumferential amplitude ratios can be obtained as
C n;i ¼ U n;i=W n;i and
Gn;i ¼ V n;i=W n;i,respectively. For harmonic
motion, the complete solutions are given by
uð x; y; t Þ ¼X1n¼0
X8i¼1
C n;iW n;ie jkn;i x cosðnyÞe jot
(13)
v
ð x; y; t
Þ ¼X1
n¼0X8
i¼1Gn;iW n;ie
jkn;i x sin
ðny
Þe jot (14)
wð x; y; t Þ ¼X1n¼0
X8i¼1
W n;ie jkn;i x cosðnyÞe jot (15)
3.2. General solutions for the conical shell
The equations of motion for the conical shell are solved using
the power series approach presented by Tong [7] for
shallow shell theory. This approach is applied here to the
equations of motion for both the Donnell–Mushtari and the
Flügge thin shell theories. General solutions to the equations
of motion for a conical shell given by Eqs. (7)–(9) can be
expressed as
uc
ð xc ;yc ; t
Þ ¼ uc
ð xc
Þcos
ðnyc
Þe jot (16)
vc ð xc ; yc ; t Þ
¼ vc ð xc Þ sinðnyc Þ e jot
(17)
wc ð xc ;yc ; t Þ
¼ wc ð xc Þcosðnyc Þe jot
(18)where the xc -dependent component of the displacement
can be expressed in terms of a power series by
uc ð xc Þ ¼X1m¼0
am xmc (19)
vc ð xc Þ ¼X1m¼0
bm xmc (20)
wc ð xc Þ ¼ X
1
m¼0 c m xm
c (21)
Solutions for the conical shell displacements for the two thin
shell theories are presented in what follows.
3.2.1. Donnell–Mushtari equations
Using the low order Donnell–Mushtari theory, the equations of
motion given by Eqs. (7) and (8) (and where the
differential operators ~L ij are zero) are
multiplied by R2 while Eq. (9) is multiplied by R4 [7],
resulting in
R2L11uc þ R2L12vc þ
R2L13wc R2
c 2cL
@2uc @t 2
¼ 0 (22)
R2L21uc þ R2L22vc þ
R2L23wc R2
c 2cL
@2vc @t 2
¼ 0 (23)
R4L31uc þ R4L32vc þ
R4L33wc R4
c 2cL
@2wc @t 2
¼ 0 (24)
Substituting Eqs. (16)–(21) into Eqs. (22)–(24) results in the
following recurrence relations for m ¼ 0; 1;
2; . . .:
amþ2 ¼X4i¼1
Aa;iam3þi þX2i¼1
Ba;ibm1þi þX2i¼1
C a;ic m1þi (25)
bmþ2 ¼X2i¼1
Ab;iam1þi þX4i¼1
Bb;ibm3þi þ C b;1c m (26)
c mþ4 ¼
X4
i¼
1
Ac ;iam3þi þ
X3
i¼
1
Bc ;ibm3þi þ
X8
i¼
1
C c ;ic m5þi (27)
The coefficients in Eqs. (25)–(27) are given in Appendix D.
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751736
-
8/20/2019 Cylinder Cone Metal
5/19
3.2.2. Flügge equations
Using the Flügge equations, the application of the power series
solution is more complicated compared with the
Donnell–Mushtari theory due to the higher order terms. The
coefficients of the operators Lij and ~L
ij fi; j ¼ 1 : 3g
includeterms of the form 1=Rk, k=1:4. Hence, the equations of
motion given by Eqs. (17)–(19) are multiplied by R4 in order
to apply
the power series solution. Furthermore, the terms with h2
in the membrane force N s given by Eq. (A.6), given
in Appendix A,
are neglected, as in the Donnell–Mushtari theory. The
approximation of N s results in a new
~L13 term, given by
~L13 ¼ h2c 12
sin2
a cos3 aR4
h2c sin2
a cosa12R3
þ @@ xc
1 uc 2R
h2c 12
@3
@ xc @y2c
3 u2
h2c 12
sina cosaR4
@2
@y2c
(28)
Substituting Eqs. (16)–(21) into Eqs. (7)–(9) (multiplied by
R4) results in the following recurrence relations for
m ¼ 0; 1; 2; . . .:
amþ2 ¼X6i¼1
~ Aa;iam5þi þX4i¼1
~Ba;ibm3þi þX4i¼1
~C a;ic m3þi (29)
bmþ2 ¼X4i¼1
~ Ab;iam3þi þX6i¼1
~Bb;ibm5þi þX5i¼1
~C b;ic m3þi (30)
c mþ4 ¼ X6i¼1
~ Ac ;iam3þi þX5i¼1
~Bc ;ibm3þi þX8i¼1
~C c ;ic m5þi (31)
The recurrence coefficients in Eqs. (29)–(31) are given in
Appendix E. It is important to note that if the h2 term in Eq.
(A.6)
is not neglected, the power series method cannot be applied
since the recurrence relation given by Eq. (29) would
become
amþ2 ¼X6i¼1
~ Aa;iam5þi þX4i¼1
~Ba;ibm3þi þX6i¼1
~C a;ic m3þi (32)
The new terms c mþ2 and c mþ3
are not compatible with the term amþ2 on the left
side of the equation. It can be concludedthat the use of the power
series solution with the Flügge equations is only possible if the
approximated membrane force N s,
as in the Donnell–Mushtari theory, is used.
3.2.3. Conical shell displacements
Tong [7] showed that the xc -dependent
part of the displacements can be expressed in terms of eight
unknown
coefficients a0; a1; b0; b1; c 0; c 1; c 2;
c 3; which can be determined from the boundary
conditions at both ends on the conical
shell. In terms of the unknown coefficients, Eqs. (19)–(21) can
be written as follows:
uc ð xc Þ ¼ u x ;
vc ð xc Þ ¼ v x ;
wc ð xc Þ ¼ w x (33)
where
u ¼ ½u1ð xc Þ u8ð xc Þ
(34)
v ¼ ½v1ð xc Þ v8ð xc Þ
(35)
w ¼ ½w1ð xc Þ w8ð xc Þ
(36)
x ¼ ½a0 a1 b0 b1
c 0 c 1 c 2 c 3T
(37) x is the vector of the eight unknown
coefficients. In Eqs. (34)–(36), uið xc Þ,
við xc Þ and w
ið xc Þ are the base functions
of uc ð xc Þ,vc ð xc Þ and wc ð xc Þ,
respectively. The convergence property of the series solutions
uc ð xc Þ, vc ð xc Þ, wc ð xc Þ given
by Eqs. (19)–(21)has been previously discussed by Tong [7]
and are maintained for the thin-shell theories presented
here.
4. Boundary and continuity conditions
The two different methods corresponding to the wave solution and
power series method both require the application of
four boundary conditions at each end of the shell to determine
the unknown coefficients. Thus, the cylindrical and conical
shells can be coupled together by applying the required
continuity and equilibrium conditions at the interface.
The remaining boundary conditions are applied at the ends of the
coupled cylindrical–conical shell. The forces, momentsand
displacements at the junction and at the boundaries of the coupled
shells are given in accordance with the sign
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 737
-
8/20/2019 Cylinder Cone Metal
6/19
convention shown in Fig. 3. At the cylinder–cone junction,
continuity of displacements, slope, forces and bending moment
are given by
u ¼ U c (38)
w ¼ W c (39)
v ¼ V c (40)
@w
@ x ¼ @wc
@ xc (41)
~N x;c N x ¼ 0
(42)
N xy;c þM xy;c
R2
N xy þ
M xya
¼ 0 (43)
M x;c M x ¼ 0
(44)
~V x;c V x ¼ 0
(45)To take into account the change of curvature between the
cylinder and the cone, the following notation was introduced:
U c ¼ uc cosa
wc sina (46)
W c ¼ uc sinaþ
wc cosa (47)
~N x;c ¼
N x;c cosa
V x;c sina (48)
~V x;c ¼
V x;c cosaþ
N x;c sina (49)The membrane
forces N x, N y and
N xy, bending moments M x,
M y and M xy, transverse
shearing Q x and the
Kelvin–Kirchhoff
shear force V x can be derived for both
shells. Different boundary conditions can be applied to the
extremities of the coupled
shells. In this work, three different boundary conditions have
been considered, corresponding to free, clamped and shear
diaphragm. The various boundary conditions, for example for the
cylindrical shell, are
Free end : N x ¼
N xy þM xy
a
¼ M x ¼ V x ¼ 0
(50)
Clamped end :
u ¼ w ¼ @w@ x
¼ v ¼ 0 (51)
Shear-diaphragm ðSDÞ end : N x ¼
v ¼ M x ¼ w ¼ 0
(52)
ARTICLE IN PRESS
vc
v
wc
w
u
uc
N x ,c
N x ,c
Q x,c
N x,c
N x,c
Q x,c
M x,c
M x,c
M x
Q x
Q x
N x
N x
N x,
N x,
M x
Fig. 3. Positive directions for the forces, moments and
displacements of the cone and cylinder.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751738
-
8/20/2019 Cylinder Cone Metal
7/19
ARTICLE IN PRESS
L
R1
a
Fig. 4. Coupled cylindrical–conical shell.
Table 1
Frequency parameters for the free–clamped cylindrical–conical
shell.
Mode order Frequency parameter Oc
n Z Irie et al. [13] Efraim et
al. [14] Pre se nt ( Donnell –M ushta ri ) Pre sent (
Flügge)
0 1 0.5047 0.503779 0.503752 0.505354
T – 0.609852 0.609855 0.609816
2 0.9312 0.930942 0.930916 0.930904
3 0.9566 0.956379 0.956315 0.956292
4 0.9718 0.971634 0.971596 0.971538
5 1.0122 1.012090 1.011884 1.011873
1 1 0.2930 0.292875 0.292908 0.2933572 0.6368 0.635834 0.635819
0.636844
3 0.8116 0.811454 0.811446 0.811434
4 0.9316 0.931565 0.931481 0.931458
5 0.9528 0.952178 0.952189 0.952120
6 0.9922 0.992175 0.991959 0.991936
2 1 0.1010 0.099968 0.102034 0.100087
2 0.5032 0.502701 0.502899 0.502819
3 0.6916 0.691305 0.691479 0.691353
4 0.8592 0.859114 0.859017 0.858971
5 0.9164 0.915870 0.916072 0.915877
6 0.9608 0.960702 0.960475 0.960429
3 1 0.09076 0.087603 0.093771 0.087330
2 0.3921 0.391569 0.392199 0.391450
3 0.5148 0.514478 0.515184 0.514424
4 0.7537 0.753402 0.753595 0.7532955 0.7970 0.796590 0.796983
0.796557
6 0.9197 0.919635 0.919391 0.919369
4 1 0.1477 0.144619 0.150574 0.144478
2 0.3312 0.330354 0.331698 0.330177
3 0.3965 0.395649 0.397604 0.395495
4 0.6473 0.646678 0.647700 0.646548
5 0.6932 0.692805 0.693197 0.692690
6 0.8720 0.871812 0.871555 0.871532
5 1 0.2021 0.199546 0.203896 0.199540
2 0.2966 0.296020 0.296330 0.295939
3 0.3730 0.370901 0.376227 0.370707
4 0.5805 0.579750 0.581667 0.579581
5 0.6138 0.613363 0.614222 0.613231
6 0.8187 0.817951 0.819801 0.818014
‘T ’ denotes the purely torsional frequency.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 739
-
8/20/2019 Cylinder Cone Metal
8/19
The four boundary conditions at each end of the coupled
cylindrical–conical shell together with the eight continuity
equations at the junction can be arranged in matrix form
BX ¼ 0, where X is the
vector of the 16 unknown coefficientsgiven by
X ¼ ½a0 a1 b0 b1 c 0
c 1 c 2 c 3 W n;1
W n;8T (53)
The vanishing of the determinant of matrix B gives
the undamped natural frequencies of the joined shells.
ARTICLE IN PRESS
n = 0; Ωc = 0.6672
n =1; Ωc = 0.4779
n =2;Ωc = 0.3466
n =3;Ωc = 0.2587
n = 4; Ωc = 0.211
n = 5; Ωc = 0.2097
Fig. 5. Lowest order mode shapes corresponding to
n=0:5 SD–SD case.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751740
-
8/20/2019 Cylinder Cone Metal
9/19
5. Results
5.1. Natural frequencies
To confirm the validity of the presented method, results
available in Refs. [13,14] are reproduced here. A coupled
cylindrical–conical shell shown in Fig. 4 with free
boundary conditions at the cone end and a clamped boundary for
the
ARTICLE IN PRESS
n = 0; Ωc = 0.8371
n = 1; Ωc = 0.5267
n = 3; Ωc = 0.2875
n = 4; Ωc = 0.2362
n = 5; Ωc = 0.2252
n = 2; Ωc = 0.3771
Fig. 6. Lowest order mode shapes corresponding to
n=0:5 clamped–clamped case.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 741
-
8/20/2019 Cylinder Cone Metal
10/19
cylinder is examined, with the following data:
L=a ¼ 1, h=a ¼ 0:01,
R1=a ¼ 0:4226, a ¼ 303. The shells are of
the samematerial with Young’s modulus E ¼ 2:11
1011 N m2, Poisson’s ratio u ¼ 0:3 and
density r ¼ 7800kg m3.
The dimensionless frequency parameter
Oc ¼ oa=c L for the lowest six
values of the circumferential mode numberðn ¼ 0; . .
. ; 5Þ are given in Table 1. The values of the frequency
parameters agree well with those presented previously by Irieet al.
[13] and Efraim et al. [14]. A very small
difference is observed between the two shell theories except at
lower
frequencies, where the Donnell–Mushtari theory is not as
accurate as the Flügge theory [1]. When n=0, the
equation of
motion for the circumferential displacement is uncoupled from
the equations of motion for the axial and radial
displacements for both the conical and cylindrical shells,
yielding a purely torsional mode [1]. The frequency value
of the mode with order ½n Z ¼ ½0
T corresponds to the first purely torsional mode. This
frequency is omitted in the work of Irie et
al. [13] since they did not consider the torsional
solution. The purely torsional frequency is reported in Efraim et
al.
ARTICLE IN PRESS
n = 0; Ωc = 0.6618
n = 1; Ωc = 0.7200
n = 2; Ωc = 0.01001
n = 3; Ωc = 0.02566
n = 4; Ωc = 0.04649
n = 5; Ωc = 0.07271
Fig. 7. Lowest order mode shapes corresponding to
n=0:5 free–free case.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751742
http://-/?-http://-/?-http://-/?-
-
8/20/2019 Cylinder Cone Metal
11/19
[14], but their corresponding mode shape appears to be in
contrast with a purely torsional solution. To further validate
the
analytical method presented in this work, a computational finite
element model (FEM) was developed using Patran/
Nastran. Quadratic eight node (CQUAD8) elements were used for
the 2D thin shell elements; the cylinder and the cone
were meshed with 20 elements in the axial direction and 30 in
the circumferential direction. The Lanczos extraction
method was adopted in the analysis [16]. The lowest order
mode shapes corresponding to n=0:5 for SD–SD,
clamped–clamped and free–free boundary conditions have been
normalised and are, respectively, shown in Figs. 5–7.
The analytical results represented by the continuous line are
practically indistinguishable to those obtained from the FE
model (represented by dots). Screenshots of the mode shapes from
the FE model are also shown. The mode shapes for theSD–SD and
clamped–clamped cases are similar with a large deformation at the
cylinder/cone junction for n=0. As the
circumferential mode number increases, a larger deformation of
the cone with respect to the cylinder can be observed. For
the free–free case and n=0:1, the mode shapes show similar
characteristics to the other boundary conditions while
for nZ2,
a larger deformation for the cylindrical shell is observed
compared to the displacement of the conical section.
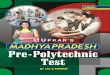
5.2. Effect of the boundary conditions
The effect of boundary conditions on the free vibrational
characteristics of a coupled conical–cylindrical shell is
examined. In Fig. 8, the lowest frequency parameter is
plotted versus the circumferential mode number n. The
frequencies
calculated using both the Donnell–Mushtari and Flügge equations
are compared with the results given by the FE model. A
logarithmic scale was used to emphasize the small differences in
the results. It can be seen that the results given by the
Flügge equations of motion match almost perfectly with the FE
results. The results given by the Donnell–Mushtari
equations are affected by several issues for coupled
cylindrical–conical shells. Firstly, it can be observed that they
performless well at low frequencies compared with the results given
by both the Fl ügge equations of motion and the finite element
model. Furthermore, they are in error for the free–free case.
For this boundary condition, the equations for n=1 give
two
incorrect frequencies of very low values that should be the
zeroes associated with rigid body rotation. This is due to the
inconsistency of Donnell–Mushtari theory with free body motion,
as reported by Kadi [17] and Kraus [18].
For clamped–clamped and SD–SD boundary conditions, the lowest
frequency parameter decreases with n. For
free–clamped boundary conditions, the frequencies initially
decrease and then increase after n=3. For the free–free case,
a
very low frequency occurs at n=2.
5.3. Effect of the semi-vertex cone angle
Figs. 9–11 present the effect of the semi-vertex angle a
of the conical shell on the frequency
parameter Oc , for different
boundary conditions of the coupled shell. The following data for
the coupled shells were used: L=a ¼ 1,
h=a ¼ 0:01, Lc ¼ 1,a 2
½0; 903. For extreme values of the semi-vertex angle corresponding
to a=01 and 901, the conical shell degenerates to
acylindrical shell and a circular plate, respectively. For the
n=0 mode, the behaviour of the coupled shell is similar for
all
ARTICLE IN PRESS
0 1 2 3 4 5
100
Circumferential mode number
L o w e s t f r e q u e n c y
p a r a m e t e r Ω
c
FEM
D.Mushtari
Flügge
Free−Free
Free−Clamped
SD−SD
Clamped−Clamped
Wrong results from the D.−Mushtari
equations (Free−Free)
10−1
10−2
10−3
Fig. 8. Lowest frequency parameter Oc for
different boundary conditions calculated using the Donnell–Mushtari
and Flügge equations and compared withthe results from an FE
model.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 743
-
8/20/2019 Cylinder Cone Metal
12/19
boundary conditions considered, resulting in a relatively
constant value in the frequency parameter for increasing values
of
a and then a mainly linear decrease in Oc . The
corresponding motion is primarily axial. As the conical shell
changes from acylindrical shell (at a=0) to a plate-like structure
(at a=901), a decrease in axial stiffness occurs resulting in
a decrease in thefrequency parameter. A similar behaviour to
the n=0 mode is observed for the n=1 bending mode for a
free–free coupled
shell. For nZ2, the frequency parameter is almost constant
for all values of a for the free–free shell. For a
coupled shell witha free boundary at the conical shell end and
clamped at the cylindrical shell end, for n=1 a slight
increase of the frequency
parameter with a is observed, showing a small mass
effect. A stiffening effect then dominates after a=651. In
thefree–clamped shell, higher order circumferential modes result in
a wavelike behaviour due to greater shape complexity.
ARTICLE IN PRESS
0 10 20 30 40 50 60 70 80 90
0
0.2
0.4
0.6
0.8
1
F r e q u e n c y p a r a m e t e r Ω
c
n = 0
n = 1
n = 2n = 3
n = 4
n = 5
Semi−vertex angle α
Fig. 10. Lowest frequency parameter Oc
for free–clamped boundary conditions.
0 10 20 30 40 50 60 70 80 90
0
0.2
0.4
0.6
0.8
1
F r e q u e n
c y p a r a m e t e r Ω
c
n = 0
n = 1
n = 2
n = 3
n = 4
n = 5
Semi−vertex angle α
Fig. 9. Lowest frequency parameter Oc
for free–free boundary conditions.
0 10 20 30 40 50 60 70 80 900
0.2
0.4
0.6
0.8
1
F r e q u e n c y p a r a m e t e r Ω
c
n = 0n = 1n = 2n = 3n = 4n = 5
Semi−vertex angle α
Fig. 11. Lowest frequency parameter
Oc for clamped–clamped boundary conditions.
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751744
-
8/20/2019 Cylinder Cone Metal
13/19
6. Conclusions
A different approach to obtain the free vibrational
characteristics of coupled cylindrical–coupled shells has been
introduced. Two different methods corresponding to a wave
solution and power series method were used to obtain the
shell displacements. The shells were then coupled by means of
continuity conditions at the cone/cylinder junction. Results
in terms of natural frequencies were compared for two different
thin shell theories, corresponding to Donnell–Mushtari
and Flügge equations, as well as with data presented previously
in Refs. [13,14]. It was shown that in order to use the Flügge
equations of motion with the power series solution, an
approximation of the shear force is required. The effect of
fourclassical boundary conditions at the ends of the coupled shells
on the natural frequencies was investigated.
In general, little difference was observed between the results
given by the two shell theories. The Flügge equations were
shown to be in very close agreement with results from a finite
element model, but the Donnell–Mushtari equations were
less accurate at low frequencies. Furthermore, for free–free
boundary conditions of the coupled shells, the Donnell–Mushtari
equations generate errors in the values of the lowest frequency
parameter for circumferential mode number n=1.
The method described in this work can also be applied to the
coupled shells of different materials and thickness.
Appendix A. Equations of motion for thin isotropic
shells
According to Flügge theory, the equations of motion for a thin
shell are given by
@ðBN sÞ
@s
þ
@ð AN ysÞ
@y
þ
@ A
@y
N sy
@B
@s
N y
þ
AB
Rs
Q s
ABrh
@2u
@t 2
¼ 0 (A.1)
@ð AN yÞ@y
þ @ðBN syÞ@s
þ @B@s
N ys @ A
@yN s þ AB
RyQ y ABrh
@2v
@t 2 ¼ 0 (A.2)
ABRs
N s AB
RyN y þ
@ðBQ sÞ@s
þ @ð AQ yÞ@y
ABrh @2w
@t 2 ¼ 0 (A.3)
where u, v and w, respectively, denote
the orthogonal component of the displacement. r is the
density and h is the shellthickness. The equations are
given in terms of two independent coordinates s
and y. The parameters A, B, Rs and
Ry depend
on the type of shell. The forces and moments in Eqs. (A.1)–(A.3)
are given by [1]
Q s ¼ 1 AB
@ðBM sÞ@s
þ @ð AM ysÞ@y
þ @ A@y
M sy @B
@s M y (A.4)
Q y ¼ 1 AB @ð AM yÞ@y þ
@ðBM syÞ@s þ @B@s M ys
@ A@yM s (A.5)
N s ¼ Eh
1 u2 es þ uey h2
12
1
Rs 1
Ry
ks
esRs
(A.6)
N y ¼ Eh
1 u2 ey þ ues h2
12
1
Ry 1
Rs
ky
eyRy
(A.7)
N sy ¼ Eh
2ð1 þ uÞ esy h2
12
1
Rs 1
Ry
t
2 esy
Rs
(A.8)
N ys ¼ Eh
2
ð1
þu
Þ esy
h2
12
1
Ry 1
Rs t
2 esy
Ry (A.9)
M s ¼ Eh3
12ð1 u2Þ ks þ uky 1
Rs 1
Ry
es
(A.10)
M y ¼ Eh3
12ð1 u2Þ ky þ uks 1
Ry 1
Rs
ey
(A.11)
M sy ¼ Eh3
24ð1 þ uÞ tesyRs
(A.12)
M ys ¼ Eh3
24ð1 þ uÞ tesyRy
(A.13)
V s ¼ Q s þ 1B
@M xy@y
(A.14)
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 745
-
8/20/2019 Cylinder Cone Metal
14/19
E is Young’s modulus and u is Poisson’s
ratio of the material. Eq. (A.14) is the Kelvin–Kirchhoff shearing
force. The normal
strain es, ey, and shear strain esy of the
middle surface and the rotations of the normal to the middle
surface denoted by Wsand Wy are given by
es ¼ 1 A
@u
@s þ v
AB
@ A
@y þ w
Rs(A.15)
ey ¼ 1
B
@v
@y þ u
AB
@B
@s þ w
Ry(A.16)
esy ¼ A
B
@ðu= AÞ@y
þ B A
@ðv=BÞ@s
(A.17)
Ws ¼ u
Rs 1
A
@w
@s (A.18)
Wy ¼ v
Ry 1
B
@w
@y (A.19)
The mid-surface changes in curvature ks, ky
and twist t are given by
ks
¼
1
A
@Ws
@s þ
Wy
AB
@ A
@y
(A.20)
ky ¼ 1
B
@Wy@y
þ Ws AB
@B
@s (A.21)
t ¼ AB
@ðWs= AÞ@y
þ B A
@ðWy=BÞ@s
þ 1Rs
1
B
@u
@y v
AB
@B
@s
þ 1
Ry
1
A
@v
@s u
AB
@ A
@y
(A.22)
According to the Donnell–Mushtari theory, the terms including
Q s and Q y in Eqs. (A.1) and
(A.2) are neglected
and Eqs. (A.6)–(A.13), respectively, simplify to
N s ¼ ½Eh=ð1 u2Þðes þ ueyÞ, N y ¼
½Eh=ð1 u2Þðey þ uesÞ,
N sy ¼ N ys ¼½Eh=2ð1 þ uÞesy,
M s ¼ ½Eh3=12ð1 u2Þðks þ ukyÞ, M y ¼
½Eh3=12ð1 u2Þðky þ uksÞ,
M sy ¼ M ys ¼ ½Eh3=24ð1 þ uÞt.
Furthermore,the mid-surface changes in curvature ks, ky
and twist t simplify to the following
expressions:
ks ¼ 1 A
@
@s
1
A
@w
@s 1
AB2@ A
@y
@w
@y (A.23)
ky ¼ 1
B
@
@y
1
B
@w
@y
1
BA2@B
@s
@w
@s (A.24)
t ¼ B A
@
@s
1
B2@w
@y
A
B
@
@y
1
A2@w
@s
(A.25)
For a cylindrical shell, the equations of motion for u,
v and w can be derived from Eqs.
(A.1)–(A.3) using the following
parameters; A ¼ a, B ¼ a, Rs ¼
1, Ry ¼ a and s ¼ x=a,
where a is the mean radius of the shell
and u, v, w and x are defined asin
Fig. 1. For a conical shell, the equations of motion for
uc , vc and wc
can be derived using A ¼ 1, B ¼ s
sina, Rs ¼ 1,Ry ¼ s tana, as well as using
the change of coordinate given by s ¼ R=sina
and
R ¼ R0 þ xc sina. R ,
R0, uc , vc , wc and
xc aredefined in Fig. 2.
Appendix B. Differential operators for the conical
shell
For the conical shell, omitting the subindex c , the
differential operators are given by
L11 ¼ sin2 a
R2 þ sina
R
@
@ xþ @
2
@ x2 þ 1 u
2R2@2
@y2
(B.1)
~L11 ¼ 1 u
2R2h2
12
cos2 a
R2@2
@y2 h
2
12
cos2 a sin2 a
R4 (B.2)
L12 ¼ 1 þu
2R
@2
@ x @y 3 u
2
sina
R2@
@y (B.3)
L13 ¼ sina cosaR
þ u cosaR
@@ x
(B.4)
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751746
-
8/20/2019 Cylinder Cone Metal
15/19
~L13 ¼ h2
12
sin2 a cos3 a
R4 h
2 sin2 a cosa
12R3 h
2
12
1
R
@3
@ x3 þ @
@ x
1 u2R
h2
12
@3
@ x @y2 ð3 uÞ
2
h2
12
sina cosa
R4@2
@y2
(B.5)
L21 ¼ 3 u
2
sina
R2@
@yþ 1 þ u
2R
@2
@ x @y (B.6)
L22 ¼
1 u
2
sin2 a
R2
þ1 u
2
sina
R
@
@ x þ 1
R2
@2v
@y2
þ1 u
2
@2
@ x2
(B.7)
~L22 ¼ h2
12
sin2 a cos2 a
R43
2ð1 uÞ h
2
12
sina cos2 a
R3@
@ xþ h
2
12
cos2 a
R23
2ð1 uÞ @
2
@ x2 (B.8)
L23 ¼ cosa
R2@
@y (B.9)
~L23 ¼ h2
12
sina cosa
R4@
@yþ h
2
12
cosa
R33
2ð1 uÞ @
2
@ x @y h
2
12
cosa
R23 u
2
@3
@ x2 @y (B.10)
L31 ¼ sina cosa
R2 u cosa
R
@
@ x (B.11)
~L31 ¼ h2
122sin
3
a cosaR4
þ h2
12sin
2
a cosaR3
@@ x
h2
12sina cos
3
aR4
þ h2
12cosaR
@3
@ x3 h
2
12sina cosa
R41 þ u
2@
2
@y2
h2
12
cosa
R31 u
2
@3
@ x @y2
(B.12)
L32 ¼ cosa
R2@v
@y (B.13)
~L32 ¼ h2
12
sina cosa
R33 þ u
2
@2
@ x @yþ h
2
12
sin2 a cosa
R43 þ u
2
@
@yþ h
2
12
cosa
R23 u
2
@3
@ x2 @y (B.14)
L33 ¼ cos2 a
R2 h
2
12r 4 (B.15)
~L33 ¼ h2
12
cos2 a
R4 2 þ cos2 aþ 2 @
2
@y2
! (B.16)
r 4 ¼ r 2r 2;r 2 ¼ @2
@ x2 þ sina
R
@
@ xþ 1
R2@2
@y2
(B.17)
Appendix C. Elements of matrix A
The elements of matrix A for the cylindrical shell
are given by
A11 ¼ O2 ðknaÞ2 ð1 uÞ
2 n2ð1 þ b2Þ (C.1)
A12 ¼ jnknað1 þ uÞ=2 (C.2)
A13 ¼ jukna þ jb2½ðknaÞ3 n2ðknaÞð1 uÞ=2
(C.3)
A21 ¼ A12 (C.4)
A22 ¼ O2 ðknaÞ2ð1 uÞ=2ð1 þ 3b2Þ n2 (C.5)
A23 ¼ n b2nðknaÞ2ð3 uÞ=2 (C.6)
A31 ¼ A13 (C.7)
A32 ¼ A23 (C.8)
A33 ¼ 1 O2 þ b2f½ðknaÞ2 þ n22 þ ð1 2n2Þg
(C.9)
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 747
-
8/20/2019 Cylinder Cone Metal
16/19
O ¼ oa=c L is the dimensionless frequency
parameter. Using Donnell–Mushtari theory, Eqs. (C.1), (C.3), (C.5),
(C.6) and (C.9),respectively, reduce to A11 ¼ O2
ðknaÞ2ð1 uÞn2=2, A13 ¼ jukna,
A22 ¼ O2 ðknaÞ2ð1 uÞ=2 n2 , A23 ¼ n
and A33 ¼ 1 O2 þ b2½ðknaÞ2 þ n22.
Appendix D. Recurrence terms for the Donnell–Mushtari
equations
The recurrence terms for the Donnell–Mushtari equations are
given by
Aa;1 ¼ rho2 sin2 a=Da (D.1)
Aa;2 ¼ 2rho2R0 sina=Da (D.2)
Aa;3 ¼ ½Gðm2 1Þsin2 aþ rho2R20 Ehn2=2ð1 þ uÞ=Da
(D.3)
Aa;4 ¼ GR0 sinaðm þ 1Þð2m þ 1Þ=Da (D.4)
Ba;1 ¼ Gn sinaðum þ m 3 þ uÞ=2Da (D.5)
Ba;2 ¼ GR0nðm þ 1Þðu þ 1Þ=2Da (D.6)
C a;1 ¼ G sina cosaðum 1Þ (D.7)
C a;2 ¼ GR0 sina cosaðm þ 1Þ (D.8)
Ab;1 ¼ Gn sinað3 þ um þ m uÞ=2Db
(D.9)
Ab;2 ¼ GR0nðm þ 1Þðu þ 1Þ=2Db (D.10)
Bb;1 ¼ rho2 sin2 a=Db (D.11)
Bb;2 ¼ 2rho2R0 sina=Db (D.12)
Bb;3 ¼ ½Gðum2 þ m2 1 þ uÞsin2 a Gn2 þ rho2R20=2Db
(D.13)
Bb;4
¼ GR0 sina
ðm
þ1
Þð2m
þ1
Þ=2Db (D.14)
C b;1 ¼ Ehn cosa=ð1 þ uÞDb (D.15)
Ac ;1 ¼ G cosa sin3 að1 þ um 2uÞ=Dc
(D.16)
Ac ;2 ¼ GR0 cosa sin2 að2 þ 3um
3uÞ=Dc (D.17)
Ac ;3 ¼ GR20 cosa sinað1 þ 3umÞ=Dc
(D.18)
Ac ;4 ¼ uGR30 cosaðm þ 1Þ=Dc
(D.19)
Bc ;1 ¼ Gn cosa sin2 a=Dc (D.20)
Bc ;2 ¼ 2GR0n cosa sina=Dc
(D.21)Bc ;3 ¼ GR20n cosa=Dc (D.22)
C c ;1 ¼ rho2 sin4 a=Dc (D.23)
C c ;2 ¼ 4rho2R0 sin3 a=Dc
(D.24)
C c ;3 ¼ sin2 aðG cos2 aþ 6rho2R20Þ=Dc
(D.25)
C c ;4 ¼ 2R0 sinaðG cos2 aþ 2rho2R20Þ=Dc
(D.26)
C c ;5 ¼ ½Dð4m2 þ 4m3 m4Þsin4 a GR20 cos2 aþ
Dð2n2m2 þ 4n2 4n2mÞsin2 a Dn4 þ rho2R40=Dc (D.27)
C c ;6 ¼ DR0 sinað2sin2 am2 þ 2sin2 am þ sin2 aþ
2n2Þðm þ 1Þð1 þ 2mÞ=Dc (D.28)
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751748
-
8/20/2019 Cylinder Cone Metal
17/19
C c ;7 ¼ DR20ð6sin2 am2 þ sin2 aþ 2n2Þðm þ 2Þðm þ
1Þ=Dc (D.29)
C c ;8 ¼ 2DR30 sinað2m þ 1Þðm þ 3Þðm þ
2Þðm þ 1Þ=Dc (D.30)where
Da ¼ GR20ðm þ 2Þðm þ 1Þ (D.31)
Db ¼ GR2
0ðm þ 2Þðm þ 1Þðu 1Þ=2 (D.32)Dc ¼ DR40ðm þ 4Þðm þ
3Þðm þ 2Þðm þ 1Þ (D.33)
G ¼ Eh=ð1 u2Þ; D ¼ Eh3=12ð1 u2Þ
(D.34)
Appendix E. Recurrence terms for the Flügge equations
The recurrence terms for the Flügge equations are given
bye Aa;1 ¼ rho2s4=eDa (E.1)e
Aa;2 ¼ 4rho2R0s3=eDa (E.2)
e Aa;3 ¼ fG½ðm 2Þ2 1s4 þ ðGn2u=2 þ 6rho2R20
Gn2=2Þs2g=eDa (E.3)e Aa;4 ¼ sR0ð9Gs2m þ 3Gs2
þ Gn2u þ 4Gs2m2 Gn2 þ 4rho2R20Þ=eDa (E.4)
e Aa;5 ¼ ½Gð6R20m2 3mR20 R20
c 2h2=2Þs2 þ Dn2uc 2=2 þ rho2R40 þ Gn2uR20=2
Dn2c 2=2 Gn2R20=2=eDa
(E.5)e Aa;6 ¼ GR30sðm þ 1Þð1 þ 4mÞ=eDa
(E.6)eBa;1 ¼ Gs3nðum u þ m 5Þ=2eDa (E.7)
eBa;2 ¼ GR0s2nð3um u þ 3m 9Þ=2
eDa (E.8)
eBa;3 ¼ GR20snð3um þ 3m 3 þ uÞ=2eDa
(E.9)eBa;4 ¼ GR30nðm þ 1Þðu þ 1Þ=2eDa
(E.10)eC a;1 ¼ Gcs3ð1 þ um 2uÞ=eDa (E.11)
eC a;2 ¼ GR0cs2ð2 þ 3um 3uÞ=eDa
(E.12)eC a;3 ¼ Gcsð2h2n2 þ 72umR20 þ h2n2
2c 2h2 þ h2n2um h2n2m 24R20 h2n2u 2h2s2mÞ=24eDa
(E.13)
eC a;4 ¼ GR0c ðm þ 1Þð24R20u 2h2s2 þ h2n2u
h2n2Þ=24eDa (E.14)e Ab;1 ¼ Gs3nðum 3u þ m þ
1Þ=2eDb (E.15)e Ab;2 ¼ GR0s2nð3um 5u þ 3m þ
3Þ=2eDb (E.16)
e Ab;3 ¼ snð36c 2D þ 36GumR20 Guh2c 2
þ 3Gh2c 2 þ 36GmR20 þ 36GR20 12GuR20 þ
12c 2DuÞ=24eDb (E.17)e Ab;4 ¼ GR30ðm þ 1Þðu þ
1Þ=2eDb (E.18)
eBb;1 ¼ rho2s4=eDb
(E.19)eBb;2 ¼ 4rho2R0s3=eDb (E.20)
eBb;3 ¼ Gð1 þ u uðm 2Þ2 þ ðm 2Þ2Þs4=2 þ
ð6rho2R20 Gn2Þs2=
eDb (E.21)
eBb;4 ¼ R0sð8rho2R20 3s2G þ 4Gn2 þ 4Gus2m2 9Gus2m þ
3Gus2 4s2Gm2 þ 9s2GmÞ=2eDb (E.22)
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 749
-
8/20/2019 Cylinder Cone Metal
18/19
eBb;5 ¼ ½ð3GuR20m2 c 2Du=2 þ Dc 2 þ c 2D=2
GR20=2 þ GuR20=2 Duc 2 Gh2mc 2=8 þ umR203G=2 3=2GmR20þ
1=8Gh2umc 2 þ 3GR20mq þ 1=24c 2Gh2m2 1=24Gh2uc 2m2
3=2c 2Dm þ c 2Dm2 þ 3=2c 2Dum c 2Dum2Þs2
Gn2R20 þrho2R40=eDb (E.23)
eBb;6 ¼ R0sðm þ 1Þð24GR20m þ 24c 2Dm þ c 2Gh2m þ
6GR20 c 2Gh2 6c 2DÞðu 1Þ=12
eDb (E.24)
eC b;1 ¼ Gcs2n=eDb (E.25)eC b;2 ¼
2GR0csn=eDb (E.26)
eC b;3 ¼ cnð24GR20 þ 24Dm2s2 þ 4Gh2ums2 þ
2n2Gh2 þ 3Gh2s2 24n2D Gh2um2s2 6Gh2ms2 þ 24c 2D 2c 2Gh2
3Gh2us2 þ Gh2m2s2Þ=24eDb (E.27)
eC b;4 ¼ R0csnðm þ 1Þð48Dm 2Gh2m þ 2Gh2um 24D 3Gh2u þ
5Gh2Þ=24eDb (E.28)eC b;5 ¼ DR20cnðm þ 2Þðm þ 1Þð1
þ uÞ=2eDb (E.29)
e Ac ;1 ¼ Gcs3ð1 þ um 2uÞ=eDc
(E.30)e Ac ;2 ¼ GR0cs2ð2 þ 3um 3uÞ=eDc
(E.31)e Ac ;3 ¼ ½1=12cDð24 36m 12m3 þ 36m2Þs3
1=12c ð12GR20 6Dn2u þ c 2Gh2 þ 6Dn2um þ 36GuR20m
Dn2 6Dn2mÞs=eDc (E.32)e Ac ;4 ¼
1=2R0c ðm þ 1ÞðDn2 þ 6Dms2 2Ds2 6Dm2s2 þ Dn2u þ
2GuR20Þ=eDc (E.33)
e Ac ;5 ¼ 3DR20csðm þ 2Þðm þ 1Þm=eDc
(E.34)
e Ac ;6 ¼ DR30c ðm þ 3Þðm þ 2Þðm þ
1Þ=
eDc (E.35)
eBc ;1 ¼ Gcs2n=eDc
(E.36)eBc ;2 ¼ 2GR0csn=eDc (E.37)
eBc ;3 ¼ cnðDum2s2 þ 6Dms2 þ 2GR20 3Dm2s2 3Ds2
Ds2uÞ=2eDc (E.38)eBc ;4 ¼ Dcnðm þ 1ÞsR0ð3 þ
2um þ u 6mÞ=2eDc (E.39)
eBc ;5 ¼ DR20cnðm 1Þmð3 þ uÞ=2eDc
(E.40)
eC c ;1 ¼ rho2s4=
eDc (E.41)
eC c ;2 ¼ 4rho2R0s3=eDc
(E.42)eC c ;3 ¼ s2ðc 2G 6rho2R20Þ=eDc
(E.43)eC c ;4 ¼ 2R0sðc 2G
2rho2R20Þ=eDc (E.44)
eC c ;5 ¼ ½Dð4m3 m4 4m2Þs4 þ Dðmc 2
c 2m 2c 2 4n2m þ 2n2m2 þ 4n2Þs2 þ rho2R40
c 2GR20 þ Dc 2n2þ Dn2c 2 c 4D
Dn4=eDc (E.45)
eC c ;6 ¼ DR0sðm þ 1Þð12s2 48s2m3 þ 72s2m2
24n2 12c 2 þ 48n2m þ 12c 2Þ=12eDc
(E.46)eC c ;7 ¼ DR20ð6s2m2 þ s2 þ 2n2Þðm þ 2Þðm
þ 1Þ=
eDc (E.47)
eC c ;8 ¼ 2DR30sð2m þ 1Þðm þ 3Þðm þ 2Þðm þ
1Þ=eDc (E.48)
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751750
-
8/20/2019 Cylinder Cone Metal
19/19
where eDa ¼ GR40ðm þ 2Þðm þ 1Þ (E.49)eDb ¼
R20ð12GR20 þ 24Dc 2 þ Gh2c 2Þðm þ 2Þðm þ 1Þðu
1Þ=24 (E.50)
eDc ¼ DR40ðm þ 4Þðm þ 3Þðm þ 2Þðm þ 1Þ
(E.51)
c ¼ cos a; s ¼ sina
(E.52)
References
[1] A.W. Leissa, in: Vibration of Shells, American
Institute of Physics, New York, 1993.[2] H. Saunders, E.J. Paslay,
P.R. Wisniewski, Vibrations of conical shells, J. Acoust.
Soc. Am. 32 (1960) 765–772.[3] H. Garnet, J. Kempner,
Axisymmetric free vibration of conical shells, J. Appl. Mech.
31 (1964) 458–466.[4] R.A. Newton, Free vibrations of rocket
nozzles, Am. Inst. Aeronaut. Astronaut. J. 4 (1966)
1303–1305.[5] C.C. Siu, C.W. Bert, Free vibrational analysis of
sandwich conical shells with free edges, J. Acoust. Soc. Am.
47 (1970) 943–945.[6] T. Irie, G. Yamada, Y. Kaneko, Free
vibration of a conical shell with variable thickness, J. Sound
Vib. 82 (1982) 83–94.[7] L. Tong, Free vibration of
orthotropic conical shells, Int. J. Eng. Sci. 31 (1993)
719–733.[8] Y.P. Guo, Normal mode propagation on conical shells,
J. Acoust. Soc. Am. 96 (1994) 256–264.[9] M. Lashkari,
V.I. Weingarten, Vibrations of segmented shells, Exp.
Mech. 13 (1973) 120–125.
[10] A. Kalnins, Free vibration of rotationally symmetric
shells, J. Acoust. Soc. Am. 36 (1964) 1355–1365.[11]
J.L. Rose, R.W. Mortimer, A. Blum, Elastic-wave propagation in a
joined cylindrical–conical–cylindrical shell, Exp. Mech.
13 (1973) 150–156.
[12] W.C.L. Hu, J.P. Raney, Experimental and analytical study of
vibrations of joined shells, AIAA J. 5 (1967)
976–980.[13] T. Irie, G. Yamada, Y. Muramoto, Free vibration of
joined conical–cylindrical shells, J. Sound Vib. 95
(1984) 31–39.[14] E. Efraim, M. Eisenberger, Exact vibration
frequencies of segmented axisymmetric shells, Thin-Walled
Struct. 44 (2006) 281–289.[15] B.P. Patel, M. Ganapathi, S.
Kamat, Free vibration characteristics of laminated composite joined
conical–cylindrical shells, J. Sound Vib. 237 (2000)
920–930.[16] MSC/NASTRAN Basic Dynamic Analysis User’s Guide,
1997.[17] A.S. Kadi, A Study and Comparison of the Equations of
Thin Shell Theories, Ph.D. Thesis, Ohio State University, Columbus,
1970.[18] K. Kraus, in: Thin Elastic Shells, Wiley, New York,
1967.
ARTICLE IN PRESS
M. Caresta, N.J. Kessissoglou / Journal of Sound and Vibration
329 (2010) 733–751 751