Embed Size (px)
Citation preview

i
LỜI CẢM ƠN
Trải qua bốn năm học đại học đầy căng thẳng và thú vị, em và các bạn trong
lớp 49DDT đã được các thầy cô trong bộ môn cũng như toàn thể giảng viên trong
toàn trường truyền thụ những kiến thức thật quý giá và bổ ích cho tất cả chúng em.
Vì vậy lời đầu tiên em xin chân thành cảm ơn toàn bộ những giảng viên đã truyền
đạt kiến thức cho chúng em trong những năm qua.
Tiếp theo em muốn gửi lời cảm ơn đến thầy Bùi Thúc Minh, người đã trực
tiếp và tận tình hướng dẫn em trong suốt thời gian làm đồ án. Em xin chân thành
cảm ơn thầy.
Em cũng xin chân thành cảm ơn bố mẹ, người thân và bạn bè. Những người
đã giúp đỡ về mặt tinh thần cũng như vật chất rất nhiều để em có thể hoàn thành tốt
đồ án này. Xin chân thành cảm ơn mọi người.
Nha Trang, tháng 6 năm 2011
Sinh viên
Lê Minh Tưởng

ii
MỤC LỤC
LỜI CẢM ƠN ............................................................................................................. i
MỤC LỤC.................................................................................................................. ii
DANH MỤC CÁC KÝ HIỆU, CÁC CHỮ VIẾT TẮT..............................................v
DANH MỤC CÁC HÌNH......................................................................................... vi
MỞ ĐẦU.................................................................................................................. vii
CHƯƠNG 1: TỔNG QUAN VỀ THANG MÁY.......................................................1
1.1 Giới thiệu chung ................................................................................................................ 1
1.2 Phân loại thang máy ......................................................................................................... 2
1.2.1 Phân loại theo chức năng ........................................................................................ 2
1.2.2 Phân loại theo tốc độ di chuyển ............................................................................ 3
1.2.3 Phân loại theo tải trọng............................................................................................ 3
1.2.4 Theo hệ thống vận hành .......................................................................................... 3
1.3 Trang thiết bị cơ khí của thang máy ............................................................................ 4
1.3.1 Tổng thể thang máy .................................................................................................. 4
1.3.2 Thiết bị lắp đặt trong buồng máy.......................................................................... 6
1.3.2.1 Cơ cấu nâng .........................................................................................6
1.3.2.2 Tủ điện .................................................................................................6
1.3.2.3 Puli dẫn hướng 2 ..................................................................................6
1.3.2.4 Bộ phận hạn chế tốc độ 4 .....................................................................6
1.3.3 Thiết bị lắp đặt trong hố giếng thang máy.......................................................... 7
1.3.4 Các thiết bị lắp trong giếng thang......................................................................... 7
1.3.4.1 Ray dẫn hướng .....................................................................................7
1.3.4.2 Cabin và các thiết bị liên quan.............................................................7
1.3.4.3 Hệ thống cân bằng trong thang máy ....................................................9
1.3.4.4 Thiết bị an toàn cơ khí .......................................................................10
1.3.4.5 Cảm biến vị trí ...................................................................................11
1.4 Nguyên tắc hoạt động và sử dụng thang máy ......................................................... 13
1.4.1 Nguyên tắc hoạt động của thang máy ................................................................. 13

iii
1.4.2 Cách sử dụng thang máy ....................................................................................... 14
1.4.2.1 Gọi thang máy từ bên ngoài buồng thang..........................................14
1.4.2.2 Gọi thang từ bên trong buồng thang ..................................................15
CHƯƠNG 2: GIỚI THIỆU PLC SIMATIC S7-300 ................................................17
2.1 Mở đầu............................................................................................................................... 17
2.2 Cấu trúc phần cứng của PLC S7-300 ......................................................................... 18
2.2.1 Giới thiệu PLC S7-300 ........................................................................................... 18
2.2.2 Giới thiệu các module PLC S7-300..................................................................... 18
2.2.3 Cấu trúc bộ nhớ CPU .............................................................................................. 22
2.3 Phần mềm STEP 7 ........................................................................................................... 24
2.3.1 Chức năng của phần mềm STEP 7 ...................................................................... 24
2.3.2 Ngôn ngữ lập trình ................................................................................................... 24
2.3.3 Các bước thực hiện để viết một chương trình điều khiển ............................. 24
2.4 Ưu điểm và các ứng dụng của hệ thống điều khiển PLC..................................... 27
2.4.1 Ưu điểm của hệ thống điều khiển PLC ............................................................. 27
2.4.2 Các ứng dụng của hệ thống điều khiển PLC ................................................... 28
CHƯƠNG 3: GIỚI THIỆU PHẦN MỀM WINCC..................................................29
3.1 Giới thiệu............................................................................................................29
3.1.1 Các đặc điểm chính................................................................................................. 29
3.1.2 Các thiết lập trong WinCC ................................................................................... 31
3.1.3 Giao diện đồ họa trong WinCC Explorer ......................................................... 33
3.1.4 Các công cụ hỗ trợ của WinCC ........................................................................... 33
3.2 Giao tiếp giữa WINCC và PLC S7-300 ................................................................... 35
3.3 Các tính năng nổi trội của phiên bản WinCC 7.0 .................................................. 36
CHƯƠNG 4: CHƯƠNG TRÌNH ĐIỀU KHIỂN THANG MÁY TRÊN
SIMATIC S7-300......................................................................................................37
4.1 Yêu cầu hoạt động của thang máy ............................................................................. 37
4.2 Lưu đồ thuật toán điều khiển thang máy.................................................................. 38
4.2.1 Lưu đồ Reset buồng thang khi hệ thống bắt đầu hoạt động ........................ 38
4.2.2 Lưu đồ hoạt động của thang máy........................................................................ 39

iv
4.2.3 Lưu đồ đóng mở cửa buồng thang...................................................................... 40
4.2.4 Lưu đồ dừng hệ thống buồng thang và sự cố .................................................. 41
4.3 Các tập lệnh dùng trong chương trình điều khiển thang máy............................. 41
4.3.1 Các tiếp đểm và cuộn dây trong Bit Logic....................................................... 41
4.3.2 Lệnh so sánh bằng trong nhóm lệnh so sánh COMPARATOR ................. 45
4.3.3 Lệnh chuyển đổi BCD_I trong nhóm lệnh CONVERTER ........................ 46
4.3.4 Bộ đếm lên-xuống S_CUD trong nhóm lệnh COUNTER ........................... 47
4.3.5 Lệnh MOVE ............................................................................................................. 48
4.3.6 Bộ định thời gian S_ODT (On Delay S5 Timer) trong bộ TIMER ........... 49
4.4 Chương trình lập trình Lader trên Simatic S7_300 ............................................... 50
4.4.3 Các bước thực hiện trên Simatic S7-300 .......................................................... 54
4.4.4 Chương trình điều khiển thang máy hoàn chỉnh và giải thích hoạt
động của các Network ....................................................................................................... 56
CHƯƠNG 5: GIAO DIỆN VÀ MÔ PHỎNG THANG MÁY TRÊN WINCC .......57
5.1 Tổng thể về giao diện mô phỏng thang máy ........................................................... 57
5.2 Các bước thực hiện trên WinCC ................................................................................ 58
5.1.2 Các bước tạo liên kết giữa WinCC và S7-300 ................................................ 58
5.1.2 Thiết kế giao diện mô phỏng chương trình ...................................................... 62
5.3 Chạy mô phỏng với WinCC ........................................................................................ 71
KẾT LUẬN VÀ KIẾN NGHỊ...................................................................................88
1. Kết luận ................................................................................................................................. 88
2. Kiến nghị .............................................................................................................................. 88
TÀI LIỆU THAM KHẢO
PHỤ LỤC

v
DANH MỤC CÁC KÝ HIỆU, CÁC CHỮ VIẾT TẮT
1. Danh mục các ký hiệu
v Vận tốc
a Gia tốc
Q Tải trọng
L Cuộn cảm
2. Danh mục các chữ viết tắt
PLC Programmable Logic Control
WINCC Window Control Center
SCADA Supervisory Control And Data Acquisition
CB Cảm biến
CPU Khối xử lý trung tâm
BT Buồng thang
YC Yêu cầu
ĐC Động cơ
CTHT Công tắc hành trình
GT Gọi thang
DCDK Động cơ điều khiển
DC Đóng cửa
MC Mở cửa
ANSI-C American National Standardization Institute
DDE Dynamic Data Exchange
OLE Object Linking and Embeding
OPC OLE for Process Control
ODBC Open Data Base Connectivity
ERP Enterprise Resource Planning

vi
DANH MỤC CÁC HÌNH
Hình 1.1: Hình dáng tổng thể của thang máy .............................................................1
Hình 1.2: Các thiết bị của một thang máy...................................................................5
Hình 1.3: Cơ cấu nâng thang.......................................................................................6
Hình 1.4: Phanh hãm bảo hiểm kiểu kìm..................................................................11
Hình 1.5: Cảm biến vị trí kiểu cơ khí........................................................................11
Hình 1.6: Cảm biến vị trí kiểu cảm ứng....................................................................12
Hình 1.7: Cảm biến vị trí kiểu quang điện ...............................................................13
Hình 1.8: Mô hình điều khiển thang máy từ bên ngoài buồng thang ......................14
Hình 1.9: Bảng điều khiển bên trong thang máy ......................................................15
Hình 21: Nguyên lý chung về cấu trúc của một bộ điều khiển logic khả trình ........17
Hình 2.2: Cấu hình cứng của trạm PLC....................................................................18
Hình 2.3: Hình ảnh modul CPU của PLC S7-300 ....................................................19
Hình 2.4: Hình ảnh modul nguồn của PLC S7-300 ..................................................19
Hình 2.5: Hình ảnh module cổng vào số của PLC S7-300 .......................................20
Hình 2.6: Hình ảnh module cổng ra số của PLC S7-300..........................................20
Hình 2.7: Hình ảnh module cổng vào/ra số của PLC S7-300 ...................................21
Hình 2.8: Hình ảnh module FM của PLC S7-300.....................................................21
Hình 2.9: Hình ảnh module CP của PLC S7-300 .....................................................22
Hình 2.10: Hình mô tả quy trình thực hiện chương trình điều khiển tuyến tính ......25
Hình 2.11: Cấu trúc một chương trình có cấu trúc. ..................................................26
Hình 3.1: Sự kết hợp giữa Siemens và Microsoft ....................................................29

vii
MỞ ĐẦU
1. Lý do chọn đồ án
Ngày nay, với sự phát triển công nghiệp hóa hiện đại hóa đất nước, việc ứng
dụng các hệ thống điều khiển tự động trong các dây chuyền sản xuất công nghiệp,
cũng như trong các thiết bị dân dụng nhằm nâng cao tính linh hoạt trong sản xuất và
chất lượng sản phẩm, phục vụ những nhu cầu và lợi ích của con người ngày càng
nhiều.
Nếu như trước đây hệ thống điều khiển tự động dựa trên các rơle thì ngày
này chúng được thay thế bằng các bộ PLC với những ưu điểm vượt trội như: sự
hoạt động tin cậy, dễ lập trình, dễ chuẩn hóa.....và PLC đã trở thành một thành phần
không thể thiếu trong hệ thống tự động ngày nay. Thang máy, một thiết bị vận
chuyển đòi hỏi nghiêm ngặt những yêu cầu như điều khiển linh hoạt, ổn định, chính
xác cao…, và hiện nay ở nước ta đã có rất nhiều tòa nhà cao tầng, thang máy là một
phần không thể thiếu để đáp ứng việc đi lại cũng như tăng thêm nét thẩm mỹ của
tòa nhà. Các tòa nhà lớn thì không thể chỉ có một thang máy và các thang máy sẽ
chia thành các nhóm ở các khu vực khác nhau trong tòa nhà. Vậy vận hành các
nhóm thang máy này sao cho phù hợp, tạo sự thỏa mái cho khách hàng, tiết kiệm
quảng đường di chuyển nhằm tiết kiệm thời gian của khách cũng như năng lượng
hao phí sẽ giảm.
Từ những vần đề này, em đã chọn đồ án “MÔ PHỎNG ĐIỀU KHIỂN
THANG MÁY DÙNG SIMATIC PROTOOL/WINCC VÀ S7-300” để thực hiện đồ
án tốt nghiệp.
2. Mục tiêu nghiên cứu
� Tìm hiểu tổng thể về thang máy: tìm hiểu về các trang thiết bị của thang
máy, các cảm biến cần thiết trong thang máy, tìm hiểu nguyên tắc hoạt động và
cách sử dụng thang máy.
� Tìm hiểu về PLC Simatic S7-300: nghiên cứu cấu trúc phần cứng, cấu trúc
bộ nhớ của PLC S7-300, tìm hiểu cách sử dụng phần mềm S7-300 dùng để lập trình
cho họ PLC Simatic S7-300.

viii
� Tìm hiểu về mềm phềm Wincc: xây dựng giao diện mô phỏng trong phần
mềm Wincc, cách liên kết các biến giữa S7-300 va Wincc.
3. Đối tượng và phạm vi nghiên cứu
� Đối tượng nghiên cứu
Nghiên cứu về phần mềm S7-300 và Wincc, các tập lệnh sử dụng để điều
khiển thang máy trong phần mềm đó.
Viết chương trình điều khiển thang máy đơn năm tầng và làm mô hình mô
phỏng tĩnh thang máy đơn năm tầng.
� Phạm vi nghiên cứu
Dựa vào yêu cầu của đồ án nên đồ án chỉ tập trung đi sâu vào lập trình trên
phần mềm S7-300 để điều khiển thang máy đơn năm tầng và xây dựng mô hình mô
phỏng tĩnh trên Wincc để mô phỏng điều khiển thang máy đơn năm tầng trên màn
hình máy tính.
Tìm hiểu tổng quan thang máy về mặt lý thuyết.
4. Phương pháp nghiên cứu
Nghiên cứu lý thuyết về PLC S7-300 và phần mềm Wincc.
Mô phỏng thực nghiệm điều khiển lập trình thang máy đơn năm tầng từ việc
lập trình trên S7-300 và trên giao diện của Wincc.
5. Bố cục của đồ án
Đồ án này được thực hiện với các nội dung chủ yếu sau:
Chương 1: Tổng quan về thang máy.
Chương 2: Giới thiệu PLC Simatic S7-300.
Chương 3: Giới thiệu phần mềm WINCC.
Chương 4: Chương trình điều khiển thang máy trên Simatic S7-300.
Chương 5: Tạo giao diện và mô phỏng trên WINCC.
Mặc dù đã nỗ lực cố gắng trong quá trình thực hiện đồ án nhưng do kiến thức
và thời gian có hạn nên không tránh khỏi những sai sót nhất định. Kính mong được
sự góp ý của các thầy cô và các bạn để đồ án được hoàn chỉnh hơn.
Em xin trân thành cảm ơn !.

1
CHƯƠNG 1 TỔNG QUAN VỀ THANG MÁY
1.1 Giới thiệu chung
Thang máy là thiết bị vận tải dùng để chở người và hàng hoá theo phương
thẳng đứng hoặc nghiêng một góc nhỏ hơn 15° so với phương thẳng đứng theo một
tuyến đã định sẵn.
Thang máy và máy nâng được sử dụng rộng rãi trong các ngành sản xuất của
nền kinh tế quốc dân như trong ngành khai thác hầm mỏ, trong ngành xây dựng,
luyện kim, công nghiệp nhẹ…ở những nơi đó thang máy và máy nâng được sử dụng
để vận chuyển hàng hoá, sản phẩm, đưa công nhân tới nơi làm việc có độ cao khác
nhau…Nó đã thay thế cho sức lực của con người và mang lại năng suất cao. Hình
dáng tổng thể của thang máy được giới thiệu tại hình 1.1.
Hình 1.1: Hình dáng tổng thể của thang máy

2
Trong sinh hoạt dân dụng, thang máy được lắp đặt và sử dụng rộng rãi trong
các toà nhà cao tầng, trong các khách sạn, siêu thị, công sở và trong các bệnh
viện… Hệ thống thang máy đã giúp con người tiết kiệm được nhiều thời gian và sức
lực…
Nhiều quốc gia trên thế giới đã quy định đối với các toà nhà cao trên 6 tầng
trở lên phải được trang bị thang máy để đảm bảo cho người đi lại thuận tiện, tiết
kiệm thời gian và tăng năng suất lao động. Giá thành của thang máy trang bị cho
công trình so với tổng giá thành công trình chiếm khoảng 6% đến 7% là hợp lý.
Ở Việt Nam trước đây thang máy chủ yếu được sử dụng trong các ngành
công nghiệp để chở hàng hoá và ít được phổ biến. Nhưng trong giai đoạn hiện nay
với sự phát triển mạnh mẽ của nền kinh tế quốc dân và cơ sở hạ tầng càng ngày việc
sử dụng thang máy trong mọi lĩnh vực ngày càng tăng lên.
Thang máy là một thiết bị vận chuyển đòi hỏi tính an toàn nghiêm ngặt, nó
liên quan trực tiếp đến tài sản và tính mạng con người, vì vậy yêu cầu chung đối
với hệ thống thang máy khi thiết kế, chế tạo, lắp đặt, vận hành, sử dụng và sửa chữa
là phải tuân thủ một cách nghiêm ngặt các yêu cầu kỹ thuật an toàn được quy định
trong các tiêu chuẩn, quy trình, quy phạm.
1.2 Phân loại thang máy
Tuỳ thuộc vào tính chất, chức năng của thang máy. Thang máy có thể phân
thành rất nhiều loại tuỳ thuộc vào các tính chất, ví dụ như phân loại theo hệ dẫn
động cabin, theo vị trí đặt bộ kéo tời, theo hệ thống vận hành, theo công
dụng….dưới đây là một số phân loại.
1.2.1 Phân loại theo chức năng
- Thang máy chở người: Gia tốc cho phép được quy định theo cảm giác của
hành khách: Gia tốc tối ưu là a < 2m/s2
- Thang máy dùng trong các toà nhà cao tầng: Loại này có tốc độ trung bình
hoặc lớn, đòi hỏi vận hành êm, an toàn và có tính mỹ thuật…
- Thang máy dùng trong bệnh viện: Phải đảm bảo rất an toàn, sự tối ưu về độ
êm khi dịch chuyển, và thời gian dịch chuyển, và tính ưu tiên đúng theo các yêu cầu
của bệnh viện…

3
- Thang máy dùng trong các hầm mỏ, xí nghiệp: Đáp ứng được các điều kiện
làm việc nặng nề trong công nghiệp như tác động của môi trường làm việc: Độ ẩm,
nhiệt độ, thời gian làm việc, sự ăn mòn…
- Thang máy chở hàng được sử dụng rộng rãi trong công nghiệp kinh doanh …
nó đòi hỏi cao về việc dừng chính xác buồng thang đảm bảo cho việc vận chuyển
hàng hóa lên xuống thang máy được dễ dàng thuận tiện.
1.2.2 Phân loại theo tốc độ di chuyển
- Thang máy tốc độ thấp: v < 1 m/s.
- Thang máy tốc độ trung bình: v = 1÷2,5 m/s. Thường dùng cho các nhà có
số tầng từ 6 ÷12 tầng.
- Thang máy tốc độ cao: v = 2,5÷4 m/s. Thường dùng cho các nhà có số tầng
lớn hơn16.
- Thang máy tốc độ rất cao (siêu tốc): v =5m/s. Thường dùng trong các toà
tháp cao tầng.
1.2.3 Phân loại theo tải trọng
- Thang máy loại nhỏ: Q < 500 Kg. Hay dùng trong thư viện, trong các nhà
hàng ăn uống để vận chuyển sách hoặc thực phẩm.
- Thang máy loại trung bình: Q = 500÷1000 Kg.
- Thang máy loại lớn: Q = 1000÷1600 kg.
- Thang máy loại rất lớn: Q > 1600 Kg.
1.2.4 Theo hệ thống vận hành
- Theo mức độ tự động:
+ Loại nửa tự động.
+ Loại tự động.
- Theo tổ hợp điều khiển:
+ Điều khiển đơn.
+ Điều khiển kép.
+ Điều khiển theo nhóm.
- Theo vị trí điều khiển:
+ Điều khiển trong cabin.

4
+ Điều khiển ngoài cabin.
+ Điều khiển cả trong và ngoài cabin.
1.3 Trang thiết bị cơ khí của thang máy
1.3.1 Tổng thể thang máy
Các thiết bị chính của thang máy gồm có: Buồng thang, tời nâng, cáp treo
buồng thang, đối trọng, động cơ truyền động, phanh hãm điện từ và các thiết bị điều
khiển khác.
Tất cả các thiết bị của thang máy được trong giếng buồng thang (khoảng
không gian từ trần của tầng cao nhất đến mức sâu nhất của tầng 1), trong buồng
máy (trên sàn tầng cao nhất) và hố buồng thang (dưới mức sàn tầng 1).
Bố trí các thiết bị của một thang máy được biểu diễn trên hình 1.2.

5
Hình 1.2: Các thiết bị của một thang máy
1. Động cơ điện; 2. Puli; 3. Cáp treo; 4. Bộ hạn chế tốc độ; 5. Buồng thang;
6. Thanh dẫn hướng; 7. Hệ thống đối trọng; 8. Trụ cố định ; 9. Puli dẫn hướng;
10. Cáp liên động; 11. Cáp cấp điện; 12. Động cơ đóng mở cửa buồng thang.

6
1.3.2 Thiết bị lắp đặt trong buồng máy
1.3.2.1 Cơ cấu nâng
Trong buồng máy lắp đặt hệ thống tời nâng hạ buồng thang (cơ cấu nâng 1
trên hình 1.2) tạo ra lực kéo chuyển động buồng thang và đối trọng.
Cơ cấu nâng gồm có các bộ phận sau: Bộ phận kéo cáp (puli hoặc tang quấn
cáp), hộp giảm tốc độ, phanh hãm điện từ và động cơ truyền động. Tất cả các bộ
phận trên được lắp đặt trên tấm đế bằng thép. Trong thang máy thường dùng hai cơ
cấu nâng như hình 1.3.
- Cơ cấu nâng có hộp tốc độ (hình 1.3 a)
- Cơ cấu nâng không dùng hộp tốc độ (hình 1.3 b).
- Cơ cấu nâng không có hộp tốc độ thường được sử dụng trong các thang máy
tốc độ cao.
Hình 1.3: Cơ cấu nâng thang
1.3.2.2 Tủ điện
Trong tủ điện lắp ráp cầu dao tổng, cầu chì các loại, công tắc tơ và các loại
rơle trung gian.
1.3.2.3 Puli dẫn hướng 2
1.3.2.4 Bộ phận hạn chế tốc độ 4
Làm việc phối hợp với phanh bảo hiểm bằng cáp liên động 10 để hạn chế tốc
đọ di chuyển của buồng thang.

7
1.3.3 Thiết bị lắp đặt trong hố giếng thang máy
Trong hố giếng thang máy lắp đặt hệ thống giảm xóc 8 (hình 1.2) là hệ thống
giảm xóc dùng lò xo và giảm xóc thuỷ lực tránh sự va đập của buồng thang và đối
trọng xuống sàn của giếng thang máy trong trường hợp công tắc hành trình hạn chế
hành trình di chuyển xuống bị sự cố (không hoạt động).
1.3.4 Các thiết bị lắp trong giếng thang
1.3.4.1 Ray dẫn hướng
Ray dẫn hướng được lắp đặt dọc theo giếng thang để dẫn hướng cho cabin và
đối trọng chuyển động dọc theo giếng thang. Ray dẫn hướng đảm bảo cho cabin và
đối trọng luôn nằm ở vị trí thiết kế của chúng trong giếng thang và không bị dịch
chuyển theo hướng nằm ngang trong quá trình chuyển động. Ngoài ra ray dẫn
hướng còn phải đủ cứng vững để trọng lượng của cabin và tải trọng trong cabin tựa
lên dẫn hướng cùng các thành phần tải trọng động khi bộ hãm bảo hiểm làm việc
(trong trường hợp bị đứt cáp hoặc cabin đi xuống với tốc độ lớn hơn giá trị cho phép).
Giảm chấn:
Giảm chấn được lắp đặt dưới đáy hố thang để dừng và đỡ cabin và đối trọng
trong trường hợp cabin hoặc đối trọng chuyển động xuống dưới vượt quá vị trí đặt
của công tắc hành trình cuối cùng. Giảm chấn phải có độ cao đủ lớn để khi cabin
hoặc đối trọng tỳ lên nó thì có đủ khoảng trống cần thiết phía dưới phù hợp cho
người có trách nhiệm thực hiện kiểm tra, điều chỉnh, sửa chữa.
1.3.4.2 Cabin và các thiết bị liên quan
Cabin là bộ phận mang tải của thang máy. Cabin phải có kết cấu sao cho có
thể tháo rời nó thành từng bộ phận nhỏ. Theo cấu tạo, cabin gồm 2 phần: kết cấu
chịu lực (khung cabin) và các vách che, trần, sàn tạo thành buồng cabin.Trên khung
cabin có lắp các ngàm dẫn hướng, hệ thống treo cabin, hệ thống tay đòn và bộ hãm
bảo hiểm, hệ thống cửa và cơ cấu đóng mở cửa… Ngoài ra, cabin của thang máy
chở người phải đảm bảo các yêu cầu về thông gió, nhiệt độ và ánh sáng.
� Khung cabin
Khung cabin là phần xương sống của cabin thang máy. Được cấu tạo bằng
các thanh thép chịu lực lớn. Khung cabin phải đảm bảo cho thiết kế chịu đủ tải định mức.

8
- Ngàm dẫn hướng
Ngàm dẫn hướng có tác dụng dẫn hướng cho cabin và đối trọng chuyển động
dọc theo ray dẫn hướng và khống chế dịch chuyển ngang của cabin và đối trọng
trong giếng thang không vượt quá giá trị cho phép. Có hai loại ngàm dẫn hướng:
ngàm trượt (bạc trượt) và ngàm con lăn.
- Hệ thống treo cabin
Do cabin và đối trọng được treo bằng nhiều sợi cáp riêng biệt cho nên phải
có hệ thống treo để đảm bảo cho các sợi cáp nâng riêng biệt có độ căng như nhau.
Trong trường hợp ngược lại, sợi cáp chịu lực căng lớn nhất sẽ bị quá tải còn sợi cáp
chùng sẽ trượt trên rãnh puly ma sát nên rất nguy hiểm. Ngoài ra, do có sợi chùng
sợi căng nên các rãnh cáp trên puly ma sát sẽ bị mòn không đều. Vì vậy mà hệ
thống treo cabin phải được trang bị thêm tiếp điểm điện của mạch an toàn để ngắt
điện dừng thang khi một trong các sợi cáp chùng quá mức cho phép để phòng ngừa
tai nạn. Khi đó thang chỉ có thể hoạt động được khi đã điều chỉnh độ căng của các
cáp như nhau. Hệ thống treo cabin được lắp đặt với dầm trên khung đứng trong hệ
thống chịu lực của cabin.
- Hệ thống cửa cabin và cửa tầng
Cửa cabin và cửa tầng là những bộ phận có vai trò rất quan trong trong việc
đảm bảo an toàn và có ảnh hưởng lớn đến chất lượng, năng suất của thang máy. Hệ
thống cửa cabin và cửa tầng được thiết kế sao cho khi dừng tại tầng nào thì chỉ dùng
động cơ mở cửa buồng thang đồng thời hệ thống cơ khí gắn cửa buồng thang liên
kết với cửa tầng làm cho cửa tầng cũng được mở ra. Tương tự khi đóng lại thì hệ
thống liên kết sẽ không tác động vào cửa tầng nữa mà buồng thang lại di chuyển đi
đến các tầng khác.
� Buồng cabin
Buồng cabin là một kết cấu có thể tháo rời được gồm: Trần, sàn và vách
cabin. Các phần này có liên kết với nhau và liên kết với khung chịu lực của cabin.
Buồng cabin phải đảm bảo được các yêu cầu cần thiết về mặt kỹ thuật cũng như mặt
mỹ thuật.

9
1.3.4.3 Hệ thống cân bằng trong thang máy
Việc chọn sơ đồ động học và trọng lượng các bộ phận của hệ thống cân bằng
có ảnh hưởng lớn đến mômen tải trọng và công suất động cơ của cơ cấu dẫn động,
đến lực căng lớn nhất của cáp nâng và khả năng kéo của puly ma sát.
� Đối trọng
Đối trọng là bộ phận đóng vai trò chính trong hệ thống cân bằng của thang
máy. Đối với thang máy có chiều cao nâng không lớn, người ta chọn đối trọng sao
cho trọng lượng của nó cân bằng với trọng lượng của cabin và một phần tải trọng
nâng, cáp điện mà không dùng cáp hoặc xích cân bằng.
� Xích và cáp cân bằng
Khi thang máy có chiều cao trên 45m hoặc trọng lượng cáp nâng và cáp điện
có giá trị trên 0,1Q thì người ta phải đặt thêm cáp hoặc xích cân bằng để bù trừ lại
phần trọng lượng của cáp nâng và cáp điện chuyển từ nhánh treo cabin sang nhánh
treo đối trọng và ngược lại khi thang máy hoạt động, đảm bảo mômen tải tương đối
ổn định trên puly ma sát. Xích cân bằng thường được dùng cho thang máy có tốc độ
dưới 1,4 m/s. Đối với thang máy có tốc độ cao, người ta thường dùng cáp cân bằng
và có thiết bị kéo căng cáp cân bằng để không bị xoắn. Tại thiết bị kéo căng cáp
cân bằng phải có tiếp điểm điện an toàn để ngắt mạch điều khiển của thang máy khi
cáp cân bằng bị đứt hoặc bị dãn quá lớn và khi có sự cố với thiết bị kéo căng cáp
cân bằng.
� Cáp nâng
Có cấu tạo bằng sợi thép cacbon tốt có giới hạn bền 1400 – 1800 N/mm2.
Trong thang máy thường dùng từ 3 đến 4 sợi cáp bện. Cáp nâng được chọn theo
điều kiện sau:
SS dMAXn ≤*
Trong đó:
Smax: Lực căng cáp lớn nhất trong quá trình làm việc của thang máy.
Sd: Tải trọng phá hỏng cáp do nhà chế tạo xác định và cho trong bảng cáp
tiêu chuẩn tuỳ thuộc vào loại cáp, đường kính cáp và giới hạn bền của vật liệu sợi
thép bện cáp.

10
n: Hệ số an toàn bền của cáp, lấy không nhỏ hơn giá trị quy định trong tiêu
chuẩn, tuỳ thuộc vào tốc độ, loại thang máy và loại cơ cấu nâng.
� Bộ kéo tời
Tuỳ theo sơ đồ dẫn động mà bộ tời kéo được đặt ở trong phòng máy dẫn
động nằm ở phía trên, phía dưới hoặc nằm ở cạnh giếng thang. Bộ tời kéo dẫn động
điện gồm có hộp giảm tốc và loại không có hộp giảm tốc. Đối với thang máy có tốc
độ lớn người ta dùng bộ tời kéo không có hộp giảm tốc.
1.3.4.4 Thiết bị an toàn cơ khí
Thiết bị an toàn cơ khí trong thang máy có vai trò đảm bảo an toàn cho thang
máy và hành khách trong trường hợp xảy ra sự cố như: Đứt cáp, cáp trượt trên rãnh
puly ma sát, cabin hạ với tốc độ vượt quá giá trị cho phép. Thiết bị an toàn cơ khí
trong thang máy gồm có:
� Phanh hãm điện từ
� Phanh bảo hiểm
Chức năng của phanh bảo hiểm là hạn chế tốc độ di chuyển của buồng thang
vượt quá giới hạn cho phép và giữ chặt buồng thang tại chỗ bằng cách ép vào hai
thanh dẫn hướng trong trường hợp bị đứt cáp treo. Về kết cấu và cấu tạo, phanh bảo
hiểm có ba loại :
- Phanh bảo hiểm kiểu nêm dùng để hãm khẩn cấp.
- Phanh bảo hiểm kiểu kìm (hình 1.4) dùng để hãm êm.
- Phanh bảo hiểm kiểu lệch tâm dùng để hãm khẩn cấp.
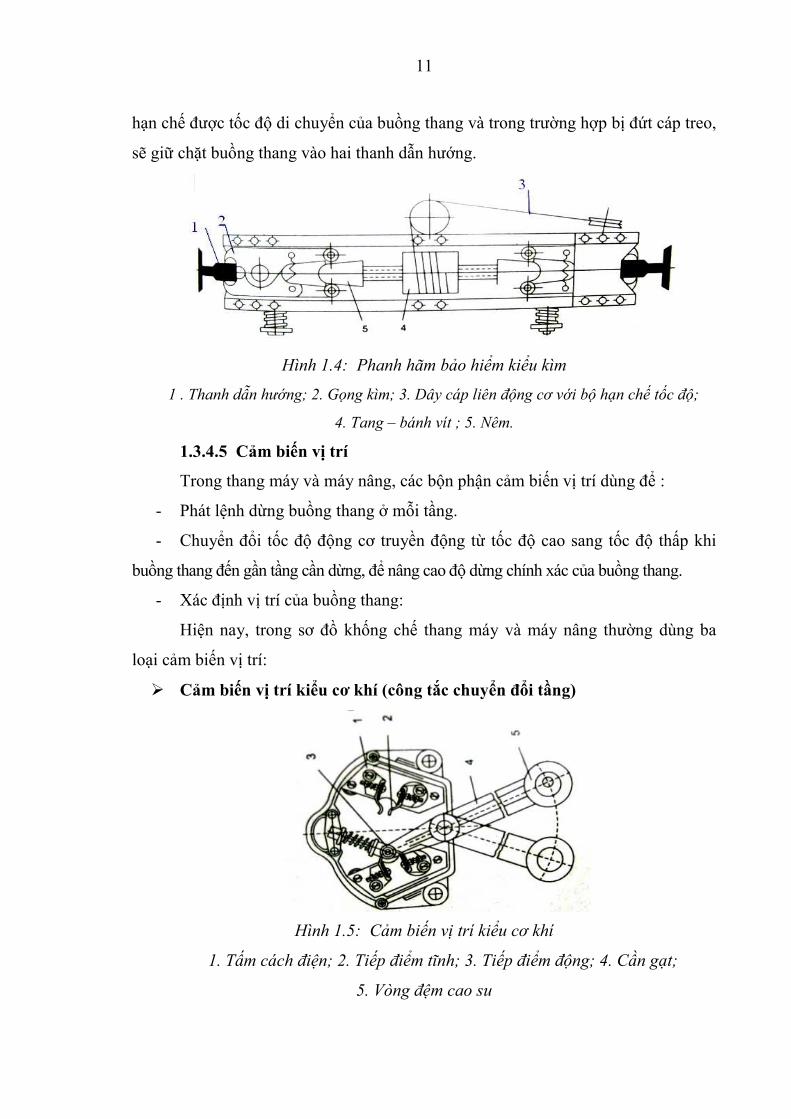
Phanh bảo hiểm lắp đặt trên nóc của buồng thang, hai gọng kìm 2 trượt dọc
theo hai thanh dẫn hướng 1. Nằm giữa hai cánh tay đầu của gọng kìm có nêm 5 gắn
chặt vối hệ thống truyền lực trực vít và tang - bánh vít 4. Hệ truyền lực bánh vít -
trục vít có hai dạng ren: bên phải là ren phải, còn phần bên trái là ren trái. Khi tốc
độ của buồng thang thấp hơn trị số giới hạn tối đa cho phép, nêm 5 ở hai đầu của
trục vít ở vị trí xa nhất so với tang - bánh vít 4, làm cho hai gọn kìm 2 trượt bình
thường dọc theo thanh dẫn hướng 1. Trong trường hợp tốc độ của buồng thang vượt
quá giới hạn cho phép, tang - bánh vít 4 sẽ quay theo chiều để kéo dài hai đầu nêm
5 về phía mình, làm cho hai gọng kìm 2 ép chặt vào thanh dẫn hướng, kết quả sẽ
11
hạn chế được tốc độ di chuyển của buồng thang và trong trường hợp bị đứt cáp treo,
sẽ giữ chặt buồng thang vào hai thanh dẫn hướng.
Hình 1.4: Phanh hãm bảo hiểm kiểu kìm
1 . Thanh dẫn hướng; 2. Gọng kìm; 3. Dây cáp liên động cơ với bộ hạn chế tốc độ;
4. Tang – bánh vít ; 5. Nêm.
1.3.4.5 Cảm biến vị trí
Trong thang máy và máy nâng, các bộn phận cảm biến vị trí dùng để :
- Phát lệnh dừng buồng thang ở mỗi tầng.
- Chuyển đổi tốc độ động cơ truyền động từ tốc độ cao sang tốc độ thấp khi
buồng thang đến gần tầng cần dừng, để nâng cao độ dừng chính xác của buồng thang.
- Xác định vị trí của buồng thang:
Hiện nay, trong sơ đồ khống chế thang máy và máy nâng thường dùng ba
loại cảm biến vị trí:
� Cảm biến vị trí kiểu cơ khí (công tắc chuyển đổi tầng)
Hình 1.5: Cảm biến vị trí kiểu cơ khí
1. Tấm cách điện; 2. Tiếp điểm tĩnh; 3. Tiếp điểm động; 4. Cần gạt;
5. Vòng đệm cao su

12
Cảm biến vị trí kiểu cơ khí là một loại công tắc ba vị trí. Khi buồng thang di
chuyển đi lên, dưới tác dụng của vấu gạt (lắp ở mỗi tầng) sẽ gạt tay gạt sang bên
phải, cặp tiếp điểm 2 bên trái kín, khi buồng thang di chuyển theo chiều đi xuống, vị
trí tay gạt ở bên trái, cặp tiếp điểm 2 ở vị trí giữa, cả hai cặp tiếp điểm 2 đều hở.
- Ưu điểm: có kết cấu đơn giản, thực hiện đủ ba chức năng của bộ phận cảm
biến vị trí.
- Nhược điểm:
+ Tuổi thọ làm việc không cao, đặc biệt là đối với thang máy tốc độ cao.
+ Gây tiếng ồn lớn, gây nhiễu cho các thiết bị vô tuyến.
� Cảm biến vị trí kiểu cảm ứng
Hình 1.6: Cảm biến vị trí kiểu cảm ứng
a) Cấu tạo của cảm biến; b) Sơ đồ nguyên tố của bộ cảm biến.
1. Mạch từ; 2. Cuộn dây; 3. Tấm sắt chữ TS
Đối với thang máy tốc độ cao, nếu dùng bộ cảm biến kiểu cơ khí, làm giảm
độ tin cậy trong quá trình làm việc. Bởi vậy trong các sơ đồ khống chế thang máy
tốc độ cao thường dùng các bộ cảm biến không tiếp điểm: kiểu cảm ứng, kiểu điện
dung và kiểu quang điện.

13
� Cảm biến vị trí kiểu quang điện
Hình 1.7 Cảm biến vị trí kiểu quang điện
Nguyên lý làm việc của bộ cảm biến kiểu quang điện như sau: khi buồng
thang chưa đến đúng tầng, ánh sáng chưa bị che khuất, transito quang TT thông,
transito T1 khoá và transito T2 thông, rơle trung gian RTr tác động, còn khi buồng
thang đến đúng tầng, ánh sáng bị che khuất, transito quang TT khoá, transito T1
thông, transito T2 khoá, rơle trung gian RTr không tác động.
1.4 Nguyên tắc hoạt động và sử dụng thang máy
1.4.1 Nguyên tắc hoạt động của thang máy
Thang máy hoạt động theo các nguyên tắc sau:
� Reset buồng thang khi đóng nguồn: Dù cho buồng thang đang ở bất kỳ vị trí
hoặc trạng thái nào, thì khi đóng nguồn đều được reset và đưa về tầng trệt.
� Nguyên tắc di chuyển lên xuống, đóng và mở cửa.
- Buồng thang chỉ hoạt động khi cửa đã hoàn toàn đóng.
- Cửa chỉ mở khi buồng thang dừng đúng tầng.
- Cửa sẽ tự động mở hoặc đóng sau khi nhận được các yêu cầu.
- Cửa buồng thang sẽ ở chế độ mở thường trực khi thang không hoạt động.

14
� Nguyên tắc đến tầng: Để xác định vị trí hiện tại của thang nhờ cảm biến ở
mỗi cửa tầng. Khi buồng thang ở tầng nào thì cảm biến nhân tín hiệu ở tầng đó và
đưa về điều khiển.
1.4.2 Cách sử dụng thang máy
1.4.2.1 Gọi thang máy từ bên ngoài buồng thang
Hình 1.8: Mô hình điều khiển thang máy từ bên ngoài buồng thang
� Gọi thang: ở mỗi tầng mà thang phục vụ, gần ngay cửa tầng đều có bảng
điều khiển phục vụ cho việc gọi thang bao gồm:
+ Hai nút ấn: Một nút để gọi cho thang đi lên , một nút để gọi thang đi
xuống . Riêng ở tầng dưới cùng và tầng trên cùng chỉ có một nút (là gọi cho
thang đi lên hoặc đi xuống).
+ Đèn báo tầng và báo chiều cho biết vị trí và chiều hoạt động hiện của
cabin thang máy. Khi muốn gọi thang, hành khách chỉ cần ấn vào nút gọi tầng theo
chiều muốn đi, tín hiệu đèn sẽ sáng lên, đèn báo hiệu hệ thống đã ghi nhận lệnh gọi.
� Đáp ứng của thang sau lệnh gọi: Nếu buồng thang đang ở một vị trí nào đó
khác với tầng mà hành khách vừa gọi, thang sẽ di chuyển đến tầng đó theo thứ tự
ưu tiên như sau:

15
+ Nếu thang di chuyển cùng chiều với lệnh gọi thang và di chuyển ngang
qua tầng mà hành khách khách đang đứng gọi, thì khi đến tầng được gọi, thang sẽ
dừng lại và đón khách.
+ Nếu thang đang di chuyển theo chiều ngược với chiều hành khách muốn
đi, hoặc cùng chiều nhưng không đi ngang qua, thì sau khi đáp ứng hết các nhu cầu
của chiều đó, thang sẽ quay trở lại đón khách.
+ Nếu buồng thang đang ở ngay tại tầng mà hành khách vừa gọi, buồng
thang sẽ mở cửa đón khách.
1.4.2.2 Gọi thang từ bên trong buồng thang
Trong buồng thang có bảng điều khiển phục vụ cho việc đi thang của khách
(Car Operating Panel) còn gọi là hộp Button Car. Bao gồm các nút có chức năng
sau:
Hình 1.9: Bảng điều khiển bên trong thang máy
+ Các nút mang số: Đại diện cho các tầng mà thang phục vụ.
+ Nút (DO – Door Open): Dùng để mở cửa (chỉ có tác dụng khi
thang dừng tại tầng).
+ Nút (DC – Door Close): Dùng để đóng cửa (chỉ có tác dụng khi
thang dừng tại tầng).

16
+ Nút Interphone hoặc Alarm : Dùng để liên lạc với bên ngoài khi
thang gặp các sự cố về điện, hoặc đứt cáp treo.
+ Công tắc E.Stop (Emergency Stop) nếu có: Để dừng thang khẩn cấp khi
có sự cố xảy ra.
� Khi đã vào bên trong buồng thang, muốn đến tầng nào, khách ấn nút chỉ định
tầng đó, thang máy sẽ lập tức di chuyển và tuần tự dừng tại các tầng mà nó đi qua.
Cửa buồng thang và cửa tầng được thiết kế đóng mở tự động. Khi buồng thang di
chuyển đến một tầng nào đó, sau khi ngừng hẳn, cửa buồng thang và cửa tầng sẽ tự
động mở để khách có thể ra (vào) buồng thang, sau vài giây cửa sẽ tự động đóng lại.
� Sau đó thang máy sẽ thực hiện lệnh tiếp theo. Nếu không muốn chờ hết
khoảng thời gian cửa đóng lại, khách có thể ấn nút DC (Door Close) để đóng cửa
buồng thang. Trong trường hợp khẩn cấp muốn dừng thang, khách có thể ấn nút
E.Stop (nếu có) trên bảng điều khiển trong buồng thang. Khi có sự cố mất điện,
khách ấn vào nút Interphone hoặc Alarm để yêu cầu giúp đỡ từ bên ngoài.

17
CHƯƠNG 2 GIỚI THIỆU PLC SIMATIC S7-300
2.1 Mở đầu
Thiết bị điều khiển lôgic khả trình (Programmable Logic Control) viết tắt là
PLC, là loại thiết bị cho phép thực hiện linh hoạt các thuật toán điều khiển số thông
qua một ngôn ngữ lập trình, mà ta không cần phải thực hiện các thuật toán đó trên
các mạch số. Như vậy với việc có chương trình chứa trong mình, PLC đã thực sự là
một bộ điều khiển số nhỏ gọn, dễ thay đổi thuật toán và đặc biệt dễ trao đổi thông
tin với môi trường xung quanh (với các PLC khác hoặc với máy tính). Toàn bộ
chương trình điều khiển đều được ghi trong bộ nhớ của PLC dưới dạng các khối
chương trình như (khối OB, FB hoặc FC). Chương trình được thực hiện lặp theo
chu kỳ của vòng quét (scan).
Để PLC có thể thực hiện được một chương trình điều khiển, tất nhiên PLC
phải có tính năng như một máy tính, nghĩa là phải có khối vi xử lý (CPU), hệ điều
hành, bộ nhớ để lưu chương trình điều khiển, dữ liệu và phải có các cổng vào ra để
trao đổi dữ liệu và giao tiếp với các đối tượng điều khiển.
Hình 21: Nguyên lý chung về cấu trúc của một bộ điều khiển logic khả trình

18
PLC còn được bổ xung thêm các khối chức năng đặc biệt khác như bộ đếm
thời gian (Timer), bộ đếm (Counter), các cổng vào ra tương tự và những khối hàm
chuyên dụng khác.
2.2 Cấu trúc phần cứng của PLC S7-300
2.2.1 Giới thiệu PLC S7-300
S7-300 là PLC cỡ vừa của hãng Siemens, gồm module CPU và các module
được sắp xếp trên các thanh ray (rack). Mỗi rack chứa nhiều nhất 8 module (trừ
module CPU và module nguồn), mỗi CPU làm việc nhiều nhất với 4 rack.
Hình 2.2: Cấu hình cứng của trạm PLC
2.2.2 Giới thiệu các module PLC S7-300
� Module CPU: Module CPU có chứa bộ vi xử lí, hệ điều hành, bộ nhớ, các
bộ Timer, Counter, cổng truyền thông RS485 và có thể một cổng vào ra số. Các
cổng vào ra số trên module CPU gọi là cổng vào ra OnBoard. Trong PLC S7-300 có
nhiều loại module CPU khác nhau, đặt tên theo bộ vi xử lý: CPU 312, 313, 314,
315, 316, 318. CPU có thêm các hàm chức năng được gọi tên IFM (Integrated
Function Module), CPU có cổng để nối mạng phân tán gọi là DB. Trong hệ thống
sử dụng module CPU 314 có ký hiệu: 6ES7 314-1AE01-0AB0
Module này có:
+ Vùng nhớ làm việc: 24KB
+ Thời gian xử lí 1 khối lệnh: 0.3ms/KAW
+ Sử dụng trong nối mạng MPI
19
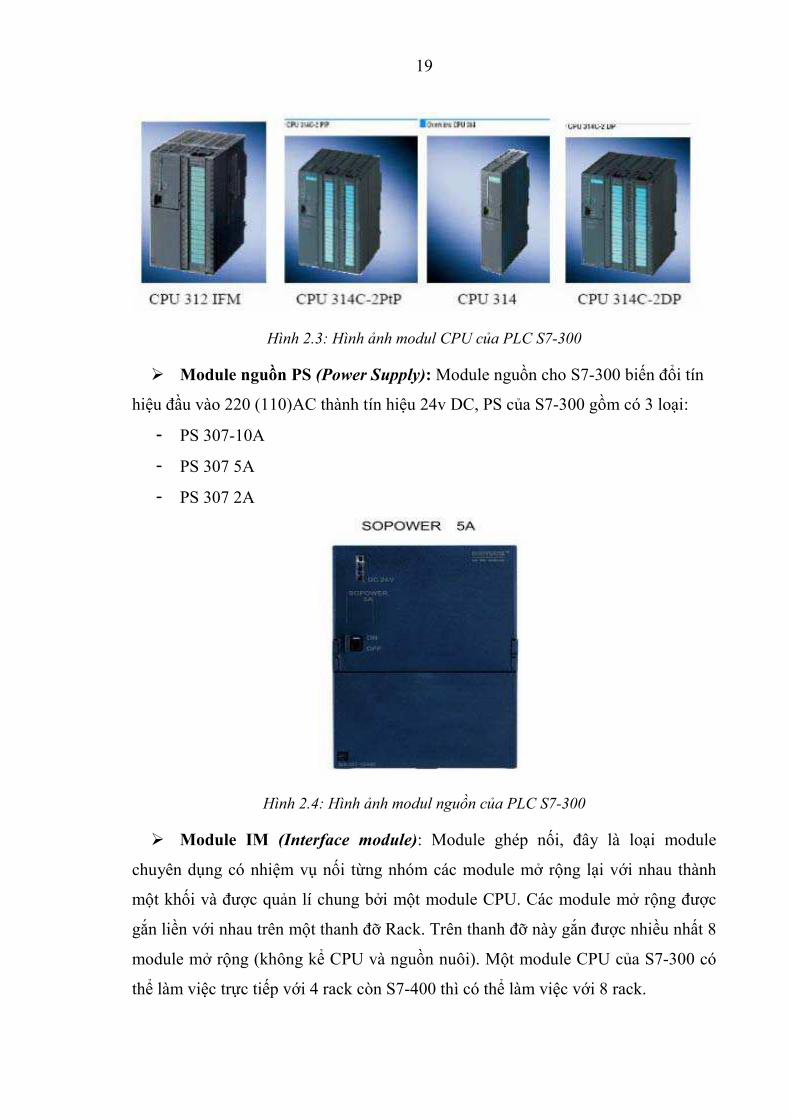
Hình 2.3: Hình ảnh modul CPU của PLC S7-300
� Module nguồn PS (Power Supply): Module nguồn cho S7-300 biến đổi tín
hiệu đầu vào 220 (110)AC thành tín hiệu 24v DC, PS của S7-300 gồm có 3 loại:
- PS 307-10A
- PS 307 5A
- PS 307 2A
Hình 2.4: Hình ảnh modul nguồn của PLC S7-300
� Module IM (Interface module): Module ghép nối, đây là loại module
chuyên dụng có nhiệm vụ nối từng nhóm các module mở rộng lại với nhau thành
một khối và được quản lí chung bởi một module CPU. Các module mở rộng được
gắn liền với nhau trên một thanh đỡ Rack. Trên thanh đỡ này gắn được nhiều nhất 8
module mở rộng (không kể CPU và nguồn nuôi). Một module CPU của S7-300 có
thể làm việc trực tiếp với 4 rack còn S7-400 thì có thể làm việc với 8 rack.
20
� Module mở rộng SM (Signal module): Module mở rộng cổng tín hiệu vào ra:
- Module DI (Digital Input): Module mở rộng các cổng vào số, số các cổng
vào có thể là 8, 16, 32 tuỳ từng loại module.
Hình 2.5: Hình ảnh module cổng vào số của PLC S7-300
- Module DO (Digital Output): Module DO là module mở rộng các cổng ra
số, số các cổng ra số mở rộng có thể là 8, 16, 32 tuỳ từng loại module.
Hình 2.6: Hình ảnh module cổng ra số của PLC S7-300
- Module DI/DO (Digital Input/ Digital Output): Là loại module mở rộng
các cổng vào ra số, số các cổng vào ra số có thể là 8 vào, 8 ra hoặc 16 vào, 16 ra tùy
từng loại module.

21
Hình 2.7: Hình ảnh module cổng vào/ra số của PLC S7-300
- Module AI (Analog Input): là loại module mở rộng các cổng vào tương tự.
Nó là những bộ chuyển đổi tương tự số 12 bit tức là mỗi tín hiệu tơng tự được
chuyển thành một tín hiệu số có độ dài 12 bit. Số các cổng vào tương tự có thể là 2,
4 hoặc 8 tuỳ từng loại module.
- Module AO (Analog output): Module AO là module mở rộng các cổng ra
tương tự. Chúng là những bộ chuyển đổi số sang tương tự (Digital to Analog
Converter). Số các cổng tương tự có thể là 2 hoặc 4 tùy từng module.
- Module AI/AO (Analog Input/ Analog output): Là module mở rộng các
cổng vào/ra tương tự. Số các cổng ra tương tự có thể là 4vào/2 ra hoặc 4 vào/4 ra
tùy từng loại module.
� Module chức năng FM (Function Module): Module có chức năng điều
khiển riêng, ví dụ module điều khiển động cơ bước, module điều khiển động cơ
servo, module PID, module điều khiển vòng kín…
Hình 2.8: Hình ảnh module FM của PLC S7-300

22
� Module CP (Communication): module phục vụ truyền thông trong mạng
giữa các PLC với nhau hoặc giữa các PLC với máy tính.
Hình 2.9: Hình ảnh module CP của PLC S7-300
2.2.3 Cấu trúc bộ nhớ CPU
Bộ nhớ của S7- 300 được chia làm 3 vùng chính:
a. Vùng chứa chương trình ứng dụng. Vùng nhớ chương trình được chia
thành 3 miền
- OB (Organisation bok): Miền nhớ chương trình tổ chức.
- FC (Funtion): Miền nhớ chương trình tổ chức thành hàm có biến hình thức
để trao đổi dữ liệu với chương trình đã gọi nó.
- FB (Funtion blok): Miền nhớ chương trình con, được tổ chức thành hàm có
khả năng trao đổi dữ liệu với bất kỳ một khối chương trình nào khác. Các dữ
liệu này phải xây dựng thành một khối dữ liệu riêng (gọi là DB – Data blok).
b. Vùng chứa tham số của hệ điều hành và chương trình ứng dụng, được
phân chia thành 7 miền khác nhau bao gồm
- I (Process image input): Miền các dữ liệu cổng vào số. trước khi bắt đầy thực
hiện chương trình, PLC sẽ đọc giá trị logic của các cổng đầu vào và cất giữ
trong vùng nhớ I. Thông thường chương trình ứng dụng không đọc trực tiếp
trạng thái logic của cổng vào mà chỉ lấy dữ liệu của cổng vào từ bộ nhớ I.
- Q (Process image output): Miền bộ nhớ đệm các cổng ra số. Kết thúc giai
đoạn thực hiện chương trình, PLC sẽ chuyển giá trị logic của bộ đệm Q tới các

23
cổng ra số. thông thường chương trình không trực tiếp gán giá trị tới cổng ra
mà chỉ chuyển chúng vào bộ đệm Q.
- M (Bit memory): miền các biến cờ. Chương trình ứng dụng sử dụng vùng nhớ
này để lưu giữ các tham số cần thiết và có thể truy nhập theo bits (M), bytes
(MB), từ (MW) hay từ kép (MD).
- T: Miền nhớ phục vụ bộ thời gian (Timer) bao gồm việc lưu trữ giá trị thời
gian đặt trước (PV – Preset value), giá trị đếm thời gian tức thời (CV –
Current value) cũng như giá trị logic thời gian của bộ thời gian.
- C: miền nhớ phục vụ bộ đếm (Counter) bao gồm việc lưu trữ giá trị đặt trước
(PV – Preset value) giá trị đếm tức thời (CV – Current value) cũng như giá trị
logic thời gian của bộ đếm
- PI: Miền địa chỉ cổng vào của các Module tương tự (I/O External intput). Các
giá trị tương tự tại cổng vào của Module tương tự sẽ được module đọc và
chuyển tự động theo những địa chỉ. Chương trình ứng dụng có thể truy nhập
miền nhớ PI theo từng bytes (PIB), từng từ (PIW) hoặc theo từng từ kép
(PID).
- PQ: Miền địa chỉ ra cho các module tương tự. chương trình ứng dụng có thể
truy nhập miền nhớ PQ theo từng bytes (PQB), từng từ (PQW) hoặc theo từng
từ kép (PQD).
c. Vùng chứa các khối lượng dữ liệu được chia thành 2 loại
- DB (Data blok): Miền chứa các dữ liệu được tổ chức thành khối. kích thước
cũng như số lượng khối do người sử dụng quy định phù hợp với từng bài toán
điều khiển. chương trình có thể truy nhập miền này theo từng bits (DBX),
bytes (DBB), bytes (DBW) hoặc từ kép (DBD).
- L (Local data blok) Miền dữ liệu địa phương, được các khối chương trình OB,
FC, FB tổ chức và sử dụng cho các biến nháp tức thời và trao đổi dữ liệu cảu
biến hình thức với những khối lượng chương trình đã gọi nó. Nội dung của
một số dữ liệu trong miền nhớ này bị xóa khi kết thúc chương trình tương ứng
trong OB, FC, FB. Miền này có thể truy nhập từ chương trình theo bits (L),
bytes (LB), từ (LW) hoặc từ kép (LD).

24
2.3 Phần mềm STEP 7
2.3.1 Chức năng của phần mềm STEP 7
- Khai báo cấu hình cứng cho một trạm PLC thuộc họ Simatic S7-300/400
- Xây dựng cấu hình mạng gồm nhiều trạm PLC S7-300/400 cũng như thủ tục
truyền thông giữa chúng.
- Soạn thảo và cài đặt chương trình điều khiển cho một hoặc nhiều trạm.
- Quan sát việc thực hiện chương trình điều khiển trong một trạm PLC và gỡ
rối chương trình.
Ngoài ra Step7 còn có cả một thư viện đầy đủ với các hàm chuẩn hữu ích,
phần trợ giúp Online rất mạnh có khả năng trả lời mọi câu hỏi của ngời sử dụng về
cách sử dụng Step 7, về cú pháp lệnh trong lập trình về xây dựng cấu hình cứng của
một trạm, của một mạng gồm nhiều trạm PLC…
2.3.2 Ngôn ngữ lập trình
Các loại PLC nói chung thường có nhiều ngôn ngữ lập trình nhằm phục vụ
các đối tượng sử dụng khác nhau. PLC S7-300 có 3 ngôn ngữ lập trình cơ bản đó là:
- Ngôn ngữ “liệt kê lệnh”-STL (Statement list). Đây là dạng ngôn ngữ lập trình
thông thờng của máy tính. Một chơng trình được ghép bởi nhiều câu lệnh theo một
thuật toán nhất định, mỗi lệnh chiếm một hàng và đều có cấu trúc chung “Tên lệnh”
+ “toán hạng”.
- Ngôn ngữ “hình thang” – LAD (Ladder logic). Đây là dạng ngôn ngữ đồ họa
thích hợp với những ngời quen thiết kế mạch điều khiển logic.
- Ngôn ngữ “hình khối” – FBD (Function block diagram). Đây cũng là ngôn
ngữ đồ họa dành cho ngời có thói quen thiết kế mạch điều khiển số.
Ngôn ngữ STL bao hàm cả ngôn ngữ LAD và FBD, từ LAD hoặc FBD có
thể chuyển sang được dạng STL nhưng ngược lại thì không. Trong STL có nhiều
lệnh không có trong LAD hay FBD.
2.3.3 Các bước thực hiện để viết một chương trình điều khiển
� Khai báo phần cứng
Bước 1: Vào SIMATIC manager /File /New (Vào một Project mới ). hoặc
vào File/Open (Với trường hợp mở một Project có sẵn).

25
Bước 2: Vào Insert/Station/Simatic 300-Hardware.
Bước 3: Kích đúp vào Hardware-Simatic 300(1).
- Rack- Rail
- Chọn nguồn – PS thích hợp
- Chọn CPU
- Chọn SM: DI; DO; DI/DO; AI; AO; AI/AO.
Trường hợp không muốn khai báo cấu hình cứng mà đi ngay vào chương
trình ứng dụng, ta chọn : Insert/ Program/S7 Program.
Chương trình cho S7-300 được lưu trong bộ nhớ của PLC ở vùng dành riêng
cho chương trình và có thể được lập với 2 dạng cấu trúc khác nhau.
� Lập trình tuyến tính (Linear programming): Kỹ thuật lập trình tuyến tính
là phương pháp lập trình mà toàn bộ chương trình ứng dụng sẽ chỉ nằm trong một
khối OB1. Kỹ thuật này có ưu điểm là gọn, rất phù hợp với những bài toán điều
khiển đơn giản, ít nhiệm vụ.
Hình 2.10: Hình mô tả quy trình thực hiện chương trình điều khiển tuyến tính
Do toàn bộ chương trình điều khiển chỉ nằm trong khối OB1, nên khối OB1
sẽ gần như là được thường trực trong vùng nhớ Work memory, trừ trường hợp khi
hệ thống phải xử lý các tín hiệu báo ngắt. Ngoài khối OB1 trong vùng nhớ Work
memory còn có miền nhớ địa phương (Local Block) cấp phát cho OB1 và những
khối DB được OB1 sử dụng.
Local Block của OB1: Khi thực hiện khối OB1, hệ điều hành luôn cấp một
Local Block có kích thước mặc định là 20 Bytes trong Work memory để OB1 có thể

26
lấy được những dữ liệu từ hệ điều hành. Mặc dù kích thước chỉ là 20 Bytes mặc
định, nhưng người sử dụng có thể mở rộng local block để sử dụng thêm các biến
nhớ cho chương trình. Tuy nhiên, phải để ý rằng do loacl block được giải phóng ở
cuối mỗi vòng quét và được cấp lại ở đầu vòng quét sau, nên các giá trị có trong
local block của vòng quét trước cũng bị mất khi bắt đầu vòng quét mới. Do đó, tốt
nhất chỉ nên sử dụng local block cho việc lưu giữ các biến nháp tạm thời trong tính
toán của một vòng quét. Cách sử dụng localblock giống với sử dụng vùng biến cờ
M (Bit memory).
� Lập trình có cấu trúc: Phương pháp lập trình có cấu trúc (Structure
Programming): là phương pháp lập trình mà ở đó toàn bộ chương trình điều khiển
được chia thành các khối FC hay FB mang một nhiệm vụ cụ thể riêng và được quản
lý chung từ những khối OB (xem hình 3.11). Kiểu lập trình này rất phù hợp cho bài
toán điều khiển phức tạp, nhiều nhiệm vụ cũng như cho việc sửa chữa, gỡ rối sau này.
Hình 2.11: Cấu trúc một chương trình có cấu trúc.
� PLC S7 –300 có 4 loại khối cơ bản
- Loại khối OB (Organization Block) : là khối tổ chức và quản lý chương trình
điều khiển như: OB1, OB35, OB40…
- Loại khối FC (Program block): là khối chương trình với những chức năng
riêng giống như một chương trình con hoặc một hàm như: FC1, FC2…
- Loại khối FB (Function block): là loại khối FC đặc biệt có khả năng trao đổi
một lượng dữ liệu lớn với các khối chương trình khác. Các dữ liệu này phải được tổ
chức thành khối dữ liệu riêng - Data Block: FB1 ,FB2…

27
- Loại khối DB (Data Block): là khối dữ liệu cần thiết để thực hiện chương
trình. Một chương trình ứng dụng có thể có nhiều khối DB như: DB1, DB2… Trong
OB1 có các lệnh gọi những khối chơng trình con theo thứ tự phù hợp với bài toán
điều khiển đặt ra.
Một nhiệm vụ điều khiển con có thể được chia nhỏ thành nhiều nhiệm vụ
nhỏ và cụ thể hơn nữa, do đó một khối chương trình con cũng có thể được gọi từ
một khối chương trình con khác. Điều cần chú ý là không bao giờ một khối chương
trình con lại gọi đến chính nó. Ngoài ra, do có sự hạn chế về ngăn xếp của các
module CPU nên không được tổ chức chương trình con gọi lồng nhau quá số lần mà
module CPU được sử dụng cho phép. Ví dụ như đối với module CPU314 thì số lệnh
gọi lồng nhau nhiều nhất có thể cho phép là 8. Nếu số lần gọi lồng nhau mà vượt
quá con số giới hạn cho phép , PLC sẽ tự chuyển sang chế độ STOP và đặt cờ báo lỗi.
2.4 Ưu điểm và các ứng dụng của hệ thống điều khiển PLC
2.4.1 Ưu điểm của hệ thống điều khiển PLC
Sự ra đời của hệ điều khiển PLC đã làm thay đổi hẳn hệ thống điều khiển của
các hệ thống tự động, hệ điều khiển dùng PLC có nhiều ưu điểm sau:
- Giảm 80% Số lượng dây nối.
- Công suất tiêu thụ của PLC rất thấp.
- Có chức năng tự chuẩn đoán do đó giúp cho công tác sửa chữa được nhanh
chóng và dễ dàng.
- Chức năng điều khiển thay đổi dễ dàng bằng thiết bị lập trình (máy tính, màn
hình) mà không cần thay đổi phần cứng nếu không có yêu cầu thêm bớt các thiết bị
xuất nhập.
- Số lượng Rơle và Timer ít hơn nhiều so với hệ điều khiển cổ điển.
- Số lượng tiếp điểm trong chương trình sử dụng không hạn chế.
- Thời gian hoàn thành một chu trình điều khiển rất nhanh (vài mS) dẫn đến
tăng cao tốc độ sản xuất.
- Chi phí lắp đặt thấp.
- Độ tin cậy cao.

28
- Chương trình điều khiển có thể in ra giấy chỉ trong vỡi phút giúp thuận tiện
cho vấn đề bảo trì và sửa chữa hệ thống.
2.4.2 Các ứng dụng của hệ thống điều khiển PLC
Từ các ưu điểm nêu trên, hiện nay PLC đã được ứng dụng trong rất nhiều
lĩnh vực khác nhau trong công nghiệp như:
- Hệ thống nâng vận chuyển.
- Dây chuyền đóng gói.
- Các ROBOT lắp giáp sản phẩm.
- Điều khiển bơm.
- Dây chuyền xử lý hoá học.
- Công nghệ sản xuất giấy.
- Dây chuyền sản xuất thuỷ tinh.
- Sản xuất xi măng.
- Công nghệ chế biến thực phẩm.
- Dây chuyền chế tạo linh kiện bán dẫn.
- Dây chuyền lắp giáp Tivi.
- Điều khiển hệ thống đèn giao thông.
- Quản lý tự động bãi đậu xe.
- Hệ thống báo động.
- Dây truyền may công nghiệp.
- Điều khiển thang máy.
- Dây chuyền sản xuất xe Ôtô.
- Sản xuất vi mạch.
- Kiểm tra quá trình sản xuất.

29
CHƯƠNG 3 GIỚI THIỆU PHẦN MỀM WINCC
3.1 Giới thiệu
Thông thường một hệ thống SCADA (Supervisory Control And Data
Aquisition) yêu cầu một phần mềm chuyên dụng để xây dựng giao diện điều khiển
(Human Machine Interface) cũng như phục vụ việc xử lý và lưu trữ dữ liệu. Phần
mềm WinCC của Siemens là một phần mềm chuyên dụng cho mục đích này.
WinCC là chữ viết tắt của Windows Control Center (Trung tâm điều khiển
chạy trên nền Windows), nói cách khác nó cung cấp các công cụ phần mềm để thiết
lập một giao diện điều khiển chạy trên các hệ điều hành của Microsoft như
Windows NT hay Windows 2000, XP, Vista 32bit (Not SP1). Trong dòng các sản
phẩm thiết kế giao diện phục vụ cho vận hành và giám sát, WinCC thuộc thứ hạng
SCADA (SCADA class) với những chức năng hữu hiệu.
WinCC kết hợp các bí quyết của Siemens, công ty hàng đầu trong tự động
hóa quá trình và năng lực của Microsoft, công ty hàng đầu trong việc phát trỉên
phần mềm cho PC.
Hình 3.1: Sự kết hợp giữa Siemens và Microsoft
3.1.1 Các đặc điểm chính
� Công nghệ phần mềm tiên tiến.

30
WinCC sử dụng công nghệ phần mềm mới nhất, nhờ sự cộng tác chặt chẽ
giữa Siemens và Microsoft, người dùng yên tâm với sự phát triển của công nghệ
phần mềm mà Microsoft là người dẫn đầu.
� Hệ thống khách chủ với chức năng SCADA.
Ngay từ hệ thống WinCC cơ sở đã có thể cung cấp tất cả các chức năng để
người dùng có thể khởi động các yêu cầu hiển thị phức tạp. Việc gọi những hình
ảnh (Picture), các cảnh báo (Alarm), đồ thị trạng thái (Trend), các báo cáo (Report)
có thể dễ dàng được xác lập.
� Có thể nâng cấp và mở rộng từ đơn giản đến phức tạp
WinCC là module trong hệ thống tự động, vì thế có thể sử dụng nó để mở
rộng hệ thống một cách linh hoạt từ đơn giản đến phức tạp, từ hệ thống với một
máy tính giám sát tới hệ thống có nhiều máy giám sát hay hệ thống có cấu trúc phân
tán với nhiều máy chủ (Server).
� Có thể phát triển theo từng lĩnh vực công nghiệp, từng yêu cầu công nghệ.
WinCC hổ trợ các module mở rộng cho từng ứng dụng hay công nghệ.
� Cơ sở dữ liệu được tích hợp sẵn
Cơ sở dữ liệu SQL đã được tích hợp sẵn trong WinCC. Tất cả dữ liệu cấu
hình về hệ thống và các dữ liệu về quá trình điều khiển đều được lưu trữ trong dữ
liệu này. Người dùng có thể truy cập dễ dàng tới cơ sở dữ liệu của WinCC bằng
SQL (Structured Query Language) hoặc ODBC (Open Database Connectivity). Sự
truy cập này cho phép WinCC chia sẻ dữ liệu từ các chương trình chạy trên nền Windows.
� Các giao thức chuẩn mạnh
WinCC tích hợp những giao thức chuẩn mạnh (DDE, OLE, ACTIVE X,
OPC). Các diện chuẩn như DDE OLE dùng cho việc chuyển dữ liệu từ các chương
trình chạy trên nền Windows.
� Ngôn ngữ vạn năng
WinCC được phát triển dùng ngôn ngữ lập trình chuẩn ANSI-C.
Giao diện lập trình API mở cho việc truy cập tới các hàm của WinCC và dữ liệu.
Tất cả các mô đun của của WinCC đều có giao diện mở cho giao diện lập
trình dùng ngôn ngữ C (C programming interface, C-API). Điều đó có nghĩa là

31
người dùng có thể tích hợp cả cấu hình của WinCC và các hàm thực hiện (runtime)
vào một chương trình của người sử dụng.
� Giao diện lập trình API mở
Tất cả các module của WinCC đều có giao diện mở cho giao diện lập trình
ngôn ngữ C. Điều đó có nghĩa là người dùng có thể tích hợp cả cấu hình của
WinCC và các hàm thực hiện vào một chương trình của người dùng. WinCC hổ trợ
ngôn ngữ lập trình vạn năng - lập trình chuẩn ANSI_C, giao diện lập trình API mở
cho việc truy cập dữ liệu tới các hàm của WinCC và cả dữ liệu giúp cho người sử
dụng lập trình theo ý mình một cách dễ dàng.
� Có thể cài đặt cấu hình trực tuyến bằng WIZARDS
Người thực hiện việc cài đặt cấu hình hệ thống có một thư viện đầy đủ cùng
với các hộp thoại và Wizards. Tại giai đoạn hiệu chỉnh hệ thống, các thay đổi có thể
thực hiện trực tuyến (online).
� Cài đặt phần mềm với khả năng lựa chọn ngôn ngữ
Phần mềm WinCC được thiết kế trên cở sở nhiều ngôn ngữ. Nghĩa là, người
dùng có thể chọn tiếng Anh, Đức, Pháp hay thậm chí các ngôn ngữ châu á làm ngôn
ngữ sử dụng. Các ngôn ngữ này cùng có thể thay đổi trực tuyến.
� Giao tiếp với hầu hết các PLC
WinCC có sẵn các kênh truyền thông để giao tiếp với các loại PLC của
Siemens như SIMATIC S5/S7/505 cũng như thông qua các giao thức chung như
Profibus DP, DDE hay OPC. Thêm vào đó, các chuẩn thông tin khác cũng có sẵn
như là những lựa chọn hay phần bổ sung.
3.1.2 Các thiết lập trong WinCC
Driver kết nối giữa WinCC và PLC: là phần giao tiếp giữa WinCC và thiết
bị PLC.
Tag Group: dùng để nhóm các Tag thành từng nhóm tốt hơn.
Tag:
Tag Management quản lí các Tag và giao tiếp với các Driver sử dụng trong
Project. Bạn có thể tìm Tag Management trong cửa sổ định vị của WinCC Explorer.

32
Các Tag với gía trị được cung cấp bởi qui trình được xem như các Tag xử lý
hay các Tag ngoại trong WinCC. Trong trường hợp các Tag xử lí, Tag Management
xác định các Driver giao tiếp bằng cách WinCC được kết nối tự động với hệ thống
và làm cách nào thay đổi dữ liệu đang thay đổi. Các Tag tương thích được tạo ra
trong cấu trúc thư mục của Driver giao tiếp đó.
Dữ liệu được chuyển tải trong một Project WinCC bằng các Tag. Mỗi Tag có
một địa chỉ dữ liệu và một tên tượng trưng, chúng được sử dụng trong Project. Địa
chỉ dữ liệu được sử dụng để giao tiếp với hệ thống tự động.
WinCC làm việc với hai loại Tag:
- External tags (tag ngoại)
- Internal tags (tag nội)
WinCC đơn giản việc vận hành các Tag bằng hai loại đối tượng:
- Tags Groups (các nhóm tag)
- Structure Types (các cấu trúc)
� External tags (Tag ngoại)
External Tags: còn gọi là “Process Tags” hay “Power Tags”. Tag này được
kết nối trực tiếp vào các địa chỉ ô nhớ của PLC hay thiết bị tương tự.
Các tag trong WinCC cần phải được định địa chỉ truy xuất dữ liệu đặc trưng
trong một AS. Những tag cần phải kết nối với một AS, được xem như tag ngoại.
Những tag không có liên kết qui trình nào, được gọi là tag nội.
� Internal tags (Tag nội)
Internal Tags: là loại Tag được cung cấp bởi Data Manager trong WinCC.
Những Tag này không được kết nối vào những ô nhớ của PLC. Internal Tags có thể
được dùng để tính toán và hiệu chỉnh trực tiếp trên WinCC hoặc lưu trữ những
thông tin chung như thời gian.
Các tag nội là tag không được liên kết với một qui trình.
Bạn dùng tag nội để xử lý dữ liệu trong một Project hay để chuyển dữ liệu
tới một tập tin lưu trữ.
Bạn có thể thiết lập các thuộc tính sau cho tag nội:
• Tên

33
• Loại dữ liệu
• Nâng cấp bề rộng của Project trên các máy tính riêng (chỉ thích hợp
với các Project nhiều người sử dụng mà không thêm các Project
Client)
• Các giá trị giới hạn
• Giá trị bắt đầu
3.1.3 Giao diện đồ họa trong WinCC Explorer
Hệ thống đồ họa của WinCC xử lý tất cả các đầu vào và đầu ra thể hiện trên
màn hình trong quá trình vận hành. Khả năng hiển thị thông tin điều khiển dưới
dạng đồ họa được thực hiện bởi một mô đun chương trình có tên gọi là Graphics
Designer (người thiết kế đồ họa). Công cụ này có thể cung cấp các công cụ có sẵn
như:
- Các hình vẽ của các phần tử tiêu biểu (như bơm, van, động cơ, bồn bể, ....).
- Các phím, hộp thoại, thanh trượt....
- Các màn hình ứng dụng và màn hình hiển thị.
- Các đối tượng OLE, ActiveX.
- Các trường vào, ra.
- Các thanh trạng thái và các hiển thị theo nhóm.
Các đối tượng đã được thay đổi để phù hợp với nhu cầu của người sử dụng
Người xây dựng hệ thống có thể thể hiện qui trình công nghệ mà mình điều khiển
bằng đồ họa. Việc định nghĩa các tính chất cơ bản của các đồ họa như: hình dáng
hình học, màu sắc, kiểu hoa văn, ...có thể được thực hiện dễ dàng bằng cách sử
dụng các công cụ thiết kế đồ họa có sẵn.
3.1.4 Các công cụ hỗ trợ của WinCC
a. Alarm Logging
Alarm Logging: Dùng để soạn thảo các thông báo mà ta hiển thị trong quá
trình vận hành của quá trình.
� Những chức năng của Alarm Logging
- Cung cấp toàn bộ những thông tin về lỗi và trạng thái vận hành.
- Được sử dụng để sớm phát hiện tình huống tới hạn.

34
- Tránh và giảm thời gian chết (down time).
- Tăng năng suất làm việc chất lượng sản phẩm.
- Cung cấp những tài liệu về hư hỏng và trạng thái vận hành.
Alarm Logging được phân ra thành hai thành phần: Configuration system và
Runtime system.
Nhiệm vụ của Alarm Logging Configuration system (Alarm Logging CS,
ALGCS) dùng để soạn thảo những tin nhắn (Message) để chúng có thể hiển thị
trong quá trình Runtime. Việc cấu hình những message system có thể thực hiện đơn
giản thông qua việc sử dụng các Wizard:
+ System Wizard cung cấp việc thiết lập các message system căn bản.
+ Thông qua việc kết nối các Wizard đơn giản hóa việc sắp xếp các process
tags của các message.
+ Hơn nữa với những hộp thoại khác nhau sẵn sàng cho phép bạn truy xuất
đồng thời vài message.
Nhiệm vụ của Alarm Logging Runtime system (Alarm Logging RT,
ALGRT) dùng để thu được các message. Nó chuẩn bị các messages và lưu trữ.
b. Tag Logging
Tag Logging chứa các hàm dùng để thu thập dữ liệu từ PLC xử lý, chuẩn bị
cho việc hiển thị dưới dạng đồ thị và bảng dữ liệu. Dữ liệu này cung cấp những
thông tin quan trọng cho việc theo dõi trạng thái vận hành của các tiến trình.
� Những đặc trưng của Tag Logging
- Đơn giản hoá cho việc phát hiện tình trạng nguy hiểm và hư hỏng.
- Tăng năng suất làm việc.
- Cải thiện chất lượng sản phẩm.
- Cung cấp công cụ tối ưu cho việc bảo trì định kỳ.
- Tag Logging cũng được phân ra hai thành phần: Configuration System
thông qua Archive Wizard và Runtime System thông qua WinCC Online Trend
Control và WinCC Online Table Control.

35
c. Report Designer
WinCC cung cấp một hệ thống báo cáo liên kết cho phép chúng ta có thể tạo
ra các bản báo cáo về dữ liệu của người sử dụng, các giá trị đang được lưu trữ hay
xử lí, các thông báo được lưu trữ hay xử lí và những tài liệu về hệ thống riêng của
người sử dụng. Các báo cáo này có thể in ra giấy hoặc mở ra khi chạy Runtime.
Report Designer có các đặc trưng sau:
- Giao diện sử dụng thuận tiện và đơn giản với các công cụ và hình ảnh có sẵn.
- Hổ trợ các phương pháp báo cáo khác nhau.
- Hiển thị từng trang báo cáo được lưu trữ.
- Hổ trợ giao diện OLE2.0, Layout và Print Jobs chuẩn.
d. Global Script
Đây là chương trình biên dịch ngôn ngữ lập trình của WinCC. Ngôn ngữ lập
trình của WinCC là ngôn ngữ ANSI C, Visual C++. Do đó ta có thể lập trình trên
một phần mềm khác rồi kéo vào Global Script bằng lệnh Import trong Global
Script. Tuy nhiên trong Global Script có rất nhiều hàm hổ trợ rất tốt cho chúng ta
trong quá trình truyền thông giữa máy tính và PLC. Cho nên chúng ta hãy sử dụng
Global Script làm trình biên dịch và phần mềm lập trình cho WinCC.
Các đặc trưng của Global Script:
- Có khả năng tạo các hàm trong C và các kích hoạt.
- Có khả năng thực hiện các hàm trong C và các kích hoạt trong Project.
- Trong Global Script ta có thể tạo mới các hàm cho cá nhân sử dụng hoặc ta
cũng có thể sữa lại một số hàm sẵn có (Project Functions, Standard Functions,
Actions).
e. User Administrator
User Adminitrator có các đặc trưng sau:
- Gán và quản lí các truy xuất đăng kí.
- Bảo vệ dữ liệu khỏi truy xuất đăng kí.
3.2 Giao tiếp giữa WINCC và PLC S7-300
Có nhiều cách để giao tiếp giữa WinCC với PLC S7-300 như: Giao tiếp qua
cổng MPI, giao tiếp qua PROFIBUS và giao tiếp qua Ethernet…Mỗi loại giao tiếp
36
đều có những ưu, nhược điểm của nó. Giao tiếp qua cổng MPI thì đơn giản, dễ thực
hiện nhưng tốc độ truyền không cao (38,4kbs). Giao tiếp qua PROFIBUS thì tốc độ
truyền rất lớn (12Mbps) nhưng chi phí cho card PROFIBUS rất đắt. Giao tiếp qua
Ethernet thì tốc độ truyền có thể đạt được 100Mbps, cho phép nhiều máy tính tham
gia, nhưng PLC phải có CP 343-1 mới kết nối được.
Khi sử dụng giao tiếp MPI thì chỉ việc dùng cáp MPI để kết nối từ cổng
COM của máy tính đến cổng MPI của PLC và chọn tốc độ truyền là 19,2 kbps hay
38,4 kbps là giao tiếp được.
Đối với giao tiếp dùng PROFIBUS thì cần phải gắn card giao tiếp CP 5611
hay CP 5613 vào máy tính sau đó cài driver, gắn cáp PROFIBUS, chọn tốc độ
truyền phù hợp là có thể giao tiếp được.
3.3 Các tính năng nổi trội của phiên bản WinCC 7.0
• Sử dụng công nghệ phần mềm tiên tiến.
• Hệ thống khách/chủ với các chức năng SCADA.
• Có thể nâng cấp mở rộng dễ dàng từ đơn giản đến phức tạp.
• Có thể phát triển tùy theo từng lĩnh vực công nghiệp hoặc từng yêu
cầu công nghệ.
• Cở sở dữ liệu ODBC/SQL đã được tích hợp sẵn.
• Các giao thức chuẩn mạnh (DDE, OLE, ActiveX, OPC).
• Ngôn ngữ vạn năng.
• Có thể cài đặt cấu hình trực tuyến bằng các Wizards.
• Cài đặt phần mềm với khả năng lựa chọn ngôn ngữ.
• Giao tiếp với hầu hết các loại PLC.

37
CHƯƠNG 4
CHƯƠNG TRÌNH ĐIỀU KHIỂN THANG MÁY
TRÊN SIMATIC S7-300
4.1 Yêu cầu hoạt động của thang máy
Khi nhấn nút ON buồng thang sẽ được hạ xuống tầng một và chờ yêu cầu
phục vụ.
Buồng thang chỉ di chuyển (đi lên hoặc đi xuống) khi các điều kiện bảo đảm
an toàn (buồng thang không bị quá tải, cửa buồng thang và cửa tầng phải đóng
kín,…) đều thỏa.
Cửa buồng thang chỉ được mở khi thang dừng đúng tầng.
Cửa buồng thang chỉ đóng khi cảm biến cửa không nhận ra người trong
khoảng thời gian chỉnh định, hoặc nhấn nút đóng cửa DC.
Có chế độ ưu tiên gọi tầng theo chiều thang đang di chuyển.
Có chế độ ưu tiên đến tầng theo chiều thang đang di chuyển.
Khi hệ thống gặp sự cố buồng thang sẽ được hạ xuống tầng một và buồng
thang dừng tại đây, tấc cả các biến nhớ phải được Reset khi hệ thống gặp sự cố. Khi
sự cố được khắc phục xong ta nhấn ON hệ thống sẽ hoạt động trở lại bình thường.
Khi dừng hệ thống ta nhấn OFF nếu phanh từ, động cơ mở cửa không hoạt
động thì hệ thống sẽ dừng ngay lập tức, đồng thời tấc cả các biến nhớ được Reset.
Nếu phanh từ, động cơ mở cửa có điện thì hệ thống sẽ dừng khi phanh từ, động cơ
mở cửa không có điện (tức là hệ thống không có yêu cầu phục vụ nữa) và tấc cả
các biến nhớ sẽ được Reset.

38
4.2 Lưu đồ thuật toán điều khiển thang máy
4.2.1 Lưu đồ Reset buồng thang khi hệ thống bắt đầu hoạt động
Đ
Đ
S
S
START
BT Đi Xuống
Dừng BT chờ yêu cầu phục vụ
END
Cửa BT đã đóng
Đến tầng 1

39
4.2.2 Lưu đồ hoạt động của thang máy
S
Đ
Đ
Đ Đ
S
S S
S
S
Đ Đ
Thang đi cùng chiều Thang đi ngược chiều
START
Tín hiệu yêu cầu thang đến
tầng i
Dừng BT phục vụ
Tín hiệu gọi
thang tại tầng i
Thang đến
đúng tầng i
END
Yêu cầu phục vụ cùng chiều
BT
Ưu tiên phục vụ cùng chiều BT trong 10s
Thang đến
đúng tầng i

40
4.2.3 Lưu đồ đóng mở cửa buồng thang
Đ Đ
Đ
Đ
S
S
S S
START
Dừng thang phục vụ
Mở cửa
Đèn và chuông
báo quá tải
Quá tải
Đóng cửa
END
Delay 5s YC Đóng cửa
Delay 20s

41
4.2.4 Lưu đồ dừng hệ thống buồng thang và sự cố
4.3 Các tập lệnh dùng trong chương trình điều khiển thang máy
4.3.1 Các tiếp đểm và cuộn dây trong Bit Logic
a) Chức năng
� : Tiếp điểm thường hở.
- Kiểu định dạng:
Tham số Loại dữ liệu Vùng nhớ Mô tả
<Địa chỉ> BOOL I, Q, M, L, D, T, C Bit kiểm tra
START
Hệ thống đang hoạt động
SU CO OFF
BT đi xuống
Đến tầng 1
Phanh từ, ĐC cửa
không có điện
Dừng hệ thống
END
Đ Đ
Đ Đ
S S
S
S

42
- Hoạt động: Tiếp điểm thường hở chỉ đóng (kín mạch) khi giá trị của bit địa
chỉ là mức “1”. Khi tiếp điểm đóng lại, có điện chạy qua tiếp điểm, và kết quả logic
lúc này là mức “1”.
� : Tiếp điểm thường đóng.
- Kiểu định dạng:
Tham số Loại dữ liệu Vùng nhớ Mô tả
<Địa chỉ> BOOL I, Q, M, L, D, T, C Bit kiểm tra
- Hoạt động: Tiếp điểm thường đóng ở trạng thái đóng kín mạch khi giá trị của
bit địa chỉ là mức “0”. Khi tiếp điểm đóng, năng lượng sẽ chạy qua tiếp điểm, và kết
quả logic lúc này là mức “1”. Khi giá trị của bit địa chỉ lên mức “1”, thì tiếp điểm bị
hở mạch. Kết quả là giá trị logic lúc này là mức “0”.
� : Ngõ ra (cuộn dây).
- Kiểu định dạng:
Tham số Loại dữ liệu Vùng nhớ Mô tả
<Địa chỉ> BOOL I, Q, M, L, D Bit gán
- Hoạt động: Làm việc như một cuộn dây trong sơ đồ khối. Khi có dòng điện
chạy qua cuộn dây, mức logic của bit là “1”. Nếu không có năng lượng qua cuộn
dây, mức logic của bit là “0”.
� : Ngõ ra được set lên “1” (Luôn có điện khi được tác động).
- Kiểu định dạng:
Tham số Loại dữ liệu Vùng nhớ Mô tả
<Địa chỉ> BOOL I, Q, M, L, D Set bit
- Hoạt động: Ngõ ra sẽ được set lên mức logic “1” khi có điện chạy vào cuộn
dây. Mức logic “0” sẽ không có tác dụng làm thay đổi trạng thái hiện tại của mạch
logic.

43
� : Ngõ ra bị reset (xóa) về “0”.
- Kiểu định dạng:
Tham số Loại dữ liệu Vùng nhớ Mô tả
<Địa chỉ> BOOL I, Q, M, L, D,T,C Reset bit
- Hoạt động: Khi có dòng điện chạy vào cuộn dây (mức trạng thái logic là “1”)
thì địa bit chỉ đó sẽ bị xóa về mức “0”. Đối với mức logic “0” (nghĩa là khi không
có điện chạy vào cuộn dây) sẽ không có tác dụng làm thay đổi trạng thái của mạch
logic.
� : Ngõ ra tác động khi nhận ra có xung cạnh xuống (Negative RLO
Edge Detection).
- Kiểu định dạng:
Tham số Loại dữ liệu Vùng nhớ Mô tả
<Địa chỉ> BOOL I, Q, M, L,
D Bit nhớ dạng cạnh xung, lưu trữ tín hiệu logic của trạng thái trước đó
- Hoạt động: Khi nhận ra tín hiệu mức logic của bit địa chỉ thay đổi từ mức
“1” về “0”, thì kết quả mức logic tại ngõ ra sẽ là “1”.
� : Ngõ ra tác động khi nhận ra xung cạnh lên (Positive RLO Edge
Detection).
- Kiểu định dạng:
Tham số Loại dữ liệu Vùng nhớ Mô tả
<Địa chỉ>
BOOL
I, Q, M, L, D
Bit nhớ dạng cạnh xung, lưu trữ tín
hiệu logic của trạng thái trước đó
- Hoạt động: Khi có sự thay dổi trạng thái mức logic từ “0” lên “1”, thì mức
logic tại ngõ ra sẽ là 1.
b) Thao tác dùng các tiếp điểm của Bit Logic trong lập trình
Trên thanh Menu của màn hình lập trình ta chọn View � Catalog

44
Màn hình lập trình sẽ thay đổi, ta có thể thấy được các tập lệnh muốn sử dụng
xuất hiện bên phía trái của màn hình trang lập trình, màn hình bên phải là sử dụng
cho việc lập trình.
Muốn chọn các tiếp điểm trong Bit Logic, ta chỉ cần nhấp chuột vào biểu
tượng Bit Logic, các tiếp điểm trong Bit Logic sẽ xuất hiện ngay phía bên dưới.
Muốn sử dụng tiếp điểm nào trong Bit Logic, chỉ cần nhấp chuột 2 lần lên
biểu tượng của tiếp điểm đó. Bên trên mỗi phần tử tiếp điểm là địa chỉ của nó.

45
4.3.2 Lệnh so sánh bằng trong nhóm lệnh so sánh COMPARATOR
a. Chức năng: So sánh giá trị số nguyên (Interger).
- Kiểu định dạng:
Thông số Loại dữ liệu
Vùng nhớ Mô tả
Box input BOOL I, Q, M, L, D Kết quả logic đã được xử lý trước đó
Box output BOOL I, Q, M, L, D Kết quả của sự so sánh, chỉ có thể xử lý nếu bit
RLO ở ngõ vào box
input = 1
IN1 INT I, Q, M, L, D, hoặc hằng số Giá trị lúc đầu để so sánh
IN2 INT I, Q, M, L, D, hoặc hằng số Giá trị thứ 2 để so sánh
- Hoạt động: Có thể được sử dụng và đặt tại mọi vị trí như như một công tắc
bình thường. Nếu kết quả so sánh là đúng, thì mức logic ngõ ra sẽ là “1”.
b. Thao tác dùng lệnh so sánh bằng trong lập trình
Bên phần cửa sổ của các khối chức năng lập trình, ta vào Comparator �
chọn khối EQ_I, ta thấy bên cử sổ lập trình xuất hiện khối CMP= =1, đó là khối so
sánh bằng. Tại chân IN1 của khối so sánh bằng ta nhập địa chỉ cần so sánh, tại chân
IN2, nhập giá trị số thực cần so sánh .

46
4.3.3 Lệnh chuyển đổi BCD_I trong nhóm lệnh CONVERTER
a. Chức năng: Chuyển đổi số BCD sang số nguyên (BCD – Interger).
- Kiểu định dạng:
Thông số Loại dữ liệu Vùng nhớ Mô tả
EN BOOL I, Q, M, L, D Ngõ vào cho phép
ENO BOOL I, Q, M, L, D Ngõ ra cho phép
IN WORD I, Q, M, L, D Số BCD
OUT INT I, Q, M, L, D Giá trị nguyên của
số BCD
- Hoạt động: Đọc nội dung của tham số ngõ vào (3 ký tự +/-999) và chuyển
đổi sang giá trị là một số nguyên (16 bit). Kết quả ở đầu ra là số nguyên. Ngõ ENO
luôn có cùng mức tín hiệu với trạng thái ngõ EN.
b. Thao tác dùng lệnh chuyển đổi BCD_I trong lập trình
Bên phần cửa sổ của các khối chức năng lập trình, ta chọn Converter �
BCD_I. Tại chân IN của khối, ta nhập địa chỉ ô nhớ có nội dung cần chuyển đổi,
còn chân OUT là địa chỉ chứa giá trị đã được chuyển đổi.

47
4.3.4 Bộ đếm lên-xuống S_CUD trong nhóm lệnh COUNTER
a. Chức năng : Dùng để đếm lên và đếm xuống.
- Kiểu định dạng:
Thông số Loại dữ liệu Vùng nhớ Mô tả
C COUNTER C Định dạng số thứ tự của COUNTER, phụ thuộc vào sự sắp xếp của CPU
CU BOOL I, Q, M, L, D Ngõ vào đếm lên
CD BOOL I, Q, M, L, D Ngõ vào đếmxuống
S BOOL I, Q, M, L, D Khởi động Counter
PV WORD I, Q, M, L, D hoặc hằng số
Đặt giá trị vào Counter (0÷999)
PV WORD I, Q, M, L, D Giá trị đạt trước
Q BOOL I, Q, M, L, D Trạng thái Counter
CV WORD I, Q, M, L, D Giá trị hiện tại của Counter (là số Hexa)
CV_BCD WORD I, Q, M, L, D Giá trị hiện tại của Counter (mã BCD)
- Hoạt động: S_CUD Counter (Up-Down Counter) hoạt động khi tại ngõ
vào Set (S) có xung dương. Nếu chân Reset có mức logic là “1”, số đếm của bộ
Counter sẽ bị xóa về 0. Giá trị Counter sẽ tăng lên khi tín hiệu ngõ vào chân CU
thay đổi từ “0” lên “1”, giá trị đếm của Counter không vượt quá 999. Nếu tại chân

48
CD có một xung dương thì giá trị đếm của Counter sẽ giảm đi 1, giá trị đếm xuống
không được nhỏ hơn 0.
+ Nếu có 2 xung dương ở cả 2 ngõ vào CU và CD thì cả 2 cùng hoạt động,
và giá trị đếm của Counter sẽ không đổi.
+ Trạng thái tín hiệu ngõ ra Q = “1” khi giá trị đếm lớn hơn 0, và Q = “0”
khi giá trị đếm bằng 0
b. Thao tác dùng bộ đếm lên-xuống S_CUD Counter trong lập trình
Bên phần cửa sổ của các khối chức năng lập trình, ta chọn Counter ���� S_CUD.
Sau đó ta nhập địa chỉ Counter hoặc những giá trị cần thiết vào các chân CU, CD, S…
4.3.5 Lệnh MOVE
a. Chức năng: Thực hiện việc gán giá trị.
- Kiểu định dạng:
Thông số Loại dữ liệu Vùng nhớ Mô tả
EN BOOL I, Q, M, L, D Ngõ vào cho phép
ENO BOOL I, Q, M, L, D Ngõ ra cho phép
IN Tất cả những dữ liệu cơ bản
có chiều dài 8, 16, 32 bit
I, Q, M, L, D hoặc
hằng số
Source value
OUT Tất cả những dữ liệu cơ bản
có chiều dài 8, 16, 32 bit
I, Q, M, L, D Destination address

49
- Hoạt động: Nó được kích hoạt bởi ngõ vào EN. Giá trị được chỉnh định ở
ngõ vào IN được sao chép vào địa chỉ đã được xác định ở ngõ ra OUT. ENO có
cùng trạng thái logic với ngõ vào EN. Lệnh MOVE chỉ có thể copy các dữ liệu dạng
BYTE, WORD, DWORD.
b. Thao tác dùng lệnh MOVE trong lập trình
Bên phần cửa sổ của các khối chức năng lập trình, ta chọn Move � MOVE.
Sau đó, nhập giá trị ngõ vào và địa chỉ ngõ ra tại các chân IN và OUT của khối.
4.3.6 Bộ định thời gian S_ODT (On Delay S5 Timer) trong bộ TIMER
a. Chức năng: Tạo ra một khoảng thời gian chậm rồi mới thực thi chương trình.
- Kiểu định dạng:
Thông số Loại dữ liệu Vùng nhớ Mô tả
T TIMER T Số thứ tự của Timer, phụ thuộc vào sự sắp xếp của CPU
S BOOL I, Q, M, L, D Khởi động ngõ vào
TV S5TIME I, Q, M, L, D Đặt giá trị thời gian
R BOOL I, Q, M, L, D Xóa ngõ vào
Q BOOL I, Q, M, L, D Trạng thái của Timer
BI WORD I, Q, M, L, D Giá trị thời gian còn lại (dạng số nguyên)
BCD WORD I, Q, M, L, D Giá trị thời gian còn lại (dạng mã BCD)

50
- Hoạt động: Timer bắt đầu hoạt động khi có một xung dương kích hoạt chân
S (Set). Sự thay đổi của tín hiệu luôn ảnh hưởng đến hoạt động của Timer. Timer
chỉ có thể đếm các giá trị đã được chỉnh định tại chân TV khi luôn có xung dương
tại chân S. Trạng thái của ngõ ra Q lên mức “1” khi vòng quét của Timer đã hết mà
vẫn không có lỗi nào xảy ra, và chân S vẫn còn ở mức logic “1”. Trong khi Timer
đang họat động, nếu trạng thái tại chân S từ mức “0” về “1” thì tín hiệu của ngõ ra
Q sẽ là mức “0”.
+ Timer sẽ bị xóa nếu ngõ vào R (Reset) thay đổi từ mức “0” lên “1” trong
khi Timer đang hoạt động. Tín hiệu trạng thái ngõ ra Q sẽ ở mức “0”.
b. Thao tác dùng bộ định thời gian S_ODT trong lập trình
Bên phần cửa sổ của các khối chức năng lập trình, ta chọn Timers ����
S_ODT. Sau dó, nhập số thứ tự cho Timer, nhập thời gian đếm tại chân TV… của
bộ đếm.
4.4 Chương trình lập trình Lader trên Simatic S7_300
4.4.1 Sơ đồ kết nối PLC

51

52
4.4.2 Các cảm biến đầu vào và đầu ra
Vì lập trình điều khiển cho thang máy đơn năm tầng nên ta có số lượng đầu
vào, đầu ra như sau:
a. Đầu vào
Địa chỉ ngõ vào
Chức năng Địa chỉ bit
nhớ Chức năng
I0.0 ON M0.0 Bít nhớ I0.0
I0.1 OFF M0.1 Bít nhớ I0.1
I0.2 SU CO M0.2 Bít nhớ I0.2
I0.3 Nút gọi thang đi lên tại tầng 1 M0.3 Bít nhớ I0.3
I0.4 Nút gọi thang đi lên tại tầng 2 M0.4 Bít nhớ I0.4
I0.5 Nút gọi thang đi lên tại tầng 3 M0.5 Bít nhớ I0.5
I0.6 Nút gọi thang đi lên tại tầng 4 M0.6 Bít nhớ I0.6
I0.7 Nút gọi thang đi xuống tại tầng 5 M0.7 Bít nhớ I0.7
I1.0 Nút gọi thang đi xuống tại tầng 4 M1.0 Bít nhớ I1.0
I1.1 Nút gọi thang đi xuống tại tầng 3 M1.1 Bít nhớ I1.1
I1.2 Nút gọi thang đi xuống tại tầng 2 M1.2 Bít nhớ I1.2
I1.3 Nút yêu cầu thang đến tầng 1 M1.3 Bít nhớ I1.3
I1.4 Nút yêu cầu thang đến tầng 2 M1.3 Bít nhớ I1.4
I1.5 Nút yêu cầu thang đến tầng 3 M1.5 Bít nhớ I1.5
I1.6 Nút yêu cầu thang đến tầng 4 M1.6 Bít nhớ I1.6
I1.7 Nút yêu cầu thang đến tầng 5 M1.7 Bít nhớ I1.7
I2.0 Nút đóng cửa (DC) M2.0 Bít nhớ I2.0
I2.1 Nút mở cửa (MC) M2.1 Bít nhớ I2.1
I2.2 Cảm biến buồng thang tại tầng 1 M2.2 Bít nhớ I2.2
I2.3 Cảm biến buồng thang tại tầng 2 M2.3 Bít nhớ I2.3
I2.4 Cảm biến buồng thang tại tầng 3 M2.4 Bít nhớ I2.4
I2.5 Cảm biến buồng thang tại tầng 4 M2.5 Bít nhớ I2.5
I2.6 Cảm biến buồng thang tại tầng 5 M2.6 Bít nhớ I2.6
I2.7 Cảm biến cửa buồng thang M2.7 Bít nhớ I2.7
I3.0 Cảm biến báo quá tải M3.0 Bít nhớ I3.0
I3.3 CTHT giới hạn mở cửa M3.3 Bít nhớ I3.3
I3.4 CTHT giới hạn đóng cửa M3.4 Bít nhớ I3.4
I3.5 Cảm biến dừng bằng tầng M3.5 Bít nhớ I3.5

53
b. Đầu ra
Địa chỉ ngõ ra Chức năng
Q0.0 DCDK thang đi lên
Q0.1 DCDK thang đi xuống
Q0.2 Động cơ mở cửa
Q0.3 Động cơ đóng cửa
Q0.4 Đèn ON
Q0.5 Đèn OFF
Q0.6 Đèn và chuông báo sự cố
Q0.7 Đèn nút gọi thang đi lên tại tầng 1
Q1.0 Đèn nút gọi thang đi lên tại tầng 2
Q1.1 Đèn nút gọi thang đi lên tại tầng 3
Q1.2 Đèn nút gọi thang đi lên tại tầng 4
Q1.3 Đèn nút gọi thang đi xuống tại tầng 5
Q1.4 Đèn nút gọi thang đi xuống tại tầng 4
Q1.5 Đèn nút gọi thang đi xuống tại tầng 3
Q1.6 Đèn nút gọi thang đi xuống tại tầng 2
Q1.7 Đèn nút yêu cầu thang đến tầng 1
Q2.0 Đèn nút yêu cầu thang đến tầng 2
Q2.1 Đèn nút yêu cầu thang đến tầng 3
Q2.2 Đèn nút yêu cầu thang đến tầng 4
Q2.3 Đèn nút yêu cầu thang đến tầng 5
Q2.6 Đèn báo quá tải
Q2.7 Đèn báo buồng thang ở tầng 1
Q3.0 Đèn báo buồng thang ở tầng 2
Q3.1 Đèn báo buồng thang ở tầng 3
Q3.2 Đèn báo buồng thang ở tầng 4
Q3.3 Đèn báo buồng thang ở tầng 5
Q3.4 Phanh điện từ
Q3.5 ĐC chính
Q3.6 ĐC đóng mở cửa

54
4.4.3 Các bước thực hiện trên Simatic S7-300
Khởi động S7-300, chọn Start > All Program > SIMATIC > SIMATIC
Manager. Giao diện SIMATIC Manager xuất hiện cùng hộp thoại STEP 7
Wizard: “New Project”, nhấp Next. Hộp thoại kế tiếp xuất hiện, chọn CPU điều
khiển CPU314, rồi nhấp Next tiếp tục.
Hộp thoại tiếp theo xuất hiện, chọn khối OB1, ngôn ngữ lập trình LAD. Sau
đó nhấp Next.
Hộp thoại mới xuất hiện, nhập tên dự án vào khung Project Name “ĐIEU
KHIEN THANG MAY”, nhấp Finish kết thúc.

55
Lúc này trên cửa sổ SIMATIC Maneger xuất hiện tên Project vừa tạo ra, sau
đó chọn OB1 để mở giao diện thiết kế.
Cửa sổ giao diện làm việc xuất hiện như hình dưới, ta lần lược lấy các tiếp
điểm, cuộn dây, timer…. để hoàn thành toàn bộ chương trình.

56
4.4.4 Chương trình điều khiển thang máy hoàn chỉnh và giải thích hoạt
động của các Network
(Phụ lục 1).

57
CHƯƠNG 5
GIAO DIỆN VÀ MÔ PHỎNG THANG MÁY TRÊN WINCC
5.1 Tổng thể về giao diện mô phỏng thang máy
Theo yêu cầu ta làm giao diện mô phỏng tĩnh cho thang máy 5 tầng.
Bảng điều khiển chính cho mô hình thang máy gồm: nút ON, nút OFF, CB
SỰ CỐ và các đèn báo tương ứng.
Bảng điều khiển bên trong buồng thang máy gồm: các nút yêu cầu đến tầng
từ nút yêu cầu đến tầng một đến nút yêu cầu đến tầng năm, nút yêu cầu đóng cửa
BT, nút yêu cầu mở cửa BT và các đèn báo tương ứng của các nút.
Tại vị trí các tầng có các cảm biến để phát hiện BT đang ở vị trí tầng nào và
các đèn báo vị trí BT đang ở tầng nào.
Một cảm biến dừng bằng tầng.
Một cảm biến báo quá tải và đèn báo tương ứng.
Tại mỗi tầng có hai nút gọi thang đi lên hoặc đi xuống, riêng tầng dưới cùng
và tầng trên cùng chỉ có một nút là gọi cho thang đi lên hoặc đi xuống.
Một động cơ chính để kéo buồng thang và hai đèn báo động cơ chính đang
hoạt động kéo BT đi lên hay đi xuống, một đèn báo động cơ chính đang hoạt động
kéo BT đi lên và một đèn báo động cơ chính đang hoạt động kéo BT đi xuống.
Một động cơ đóng mở cửa và hai đèn báo động cơ đóng mở cửa đang hoạt
động đóng cửa hay mở cửa, một đèn báo động cơ đóng mở cửa đang hoạt động
đóng cửa BT và một đèn báo động cơ đóng mở cửa đang hoạt động đóng mở cửa BT.
Một cảm biến cửa BT.
Một CTHT hạn chế mở cửa BT.
Một CTHT hạn chế đóng cửa BT.
Hai đèn báo chiều đang hoạt động của BT, một đèn báo BT đang hoạt động
theo chiều lên và một đèn báo BT đang hoạt động theo chiều xuống.
Một phanh từ.

58
5.2 Các bước thực hiện trên WinCC
5.1.2 Các bước tạo liên kết giữa WinCC và S7-300
Khởi động WinCC, chọn Start > All Programs > Simatic > Wincc >
WinCC V7.0. Xuất hiện hộp thoại WinCC Explorer, nhấp tùy chọn Single-User
Project > OK. Cửa sổ Create a new project xuất hiện, đăt tên dự án là
“DIEUKHIENTHANGMAY” vào ô Project Name. Sau đó nhấp vào mũi tên
trong khung Driver chọn đường dẫn lưu, rồi nhấp Create để tạo dự án mới.
Cửa sổ giao diện WinCCExplorer xuất hiện. Từ màn hình làm việc, tạo kết
nối PLC với WinCC. Nhấn phải chuột vào Tag Management > Add New Driver.
Xuất hiện hộp thoại Add New Driver. Chọn Simatic S7 Protocol Suite.chn > Open

59
Tiếp theo ta tạo các Tag liên kết với S7_300. Simatic S7 Protocol Suite >
MPI > New Driver > Connection.
Xuất hiện hộp thoại Connection properties, đặt tên S7-300 vào khung Name
> Properties.
Xuất hiện hộp thoại đặt thông số như hình rồi > OK.
Trở lại hộp thoại WinccExplorer nhấp chuột phải vào S7-300> New Tag

60
Xuất hiện hộp thoại Properties of tag group > đặt tên vào khung (Name)
“DIEUKHIENTHANGMAY” > OK
Để tạo Tag nhớ, vào tên “DIEUKHIENTHANGMAY” Nhấn chuột phải > New Tag.
Xuất hiện hộp thoại Tag properties khai báo tên Tag trong khung Name là
“ON” > chọn Select.
Xuất hiện hộp thoại Address properties, vào khung DATA chọn Bit memory,
vào khung Address chọn Bit > M0.0 > OK.
Tương tự tạo các Tag còn lại được kết quả trong WinCCExplorer.

61

62
5.1.2 Thiết kế giao diện mô phỏng chương trình
Nhấp chuột phải vào Graphics Designer > New picture.
Sau đó nhấp chuột phải vào NewPLD và chọn Rename Picture.
Sau đó ghi vào mục New Name “DIEU KHIEN THANG MAY” > OK, sau
đó ta vào mục DIEU KHIEN THANG MAY nhấp chuột phải và chọn muc “Open
Picture”

63
Giao diện Graphics Designer xuất hiện.
Để mở thư viện linh kiện ta vào View > Library. Bảng Library xuất hiện,
nhấp đúp vào Global Library mở thư mục nhóm thiết bị, sau đó nhấp vào biểu
tượng mắt kính Preview, Glant Icons để dễ dàng quan sát thiết bị.

64
Để lấy động cơ ,ta chọn Siemens HMI Symbol Library 1.4.1 > Motors >
Motor 1.
Tương tự ta lấy các thiết bị khác.
Để tạo đèn báo cho hệ thống, ta chọn Circle trong bảng Object Palette. Sau
đó nhấp giữ chuột kéo lê tạo hình tròn, Sau đó nhấp chuột vào ô Drack Gray trong
bảng màu bên trái cửa sổ để tô màu cho hình tròn.

65
Tiếp theo ta chọn nút nhấn điều khển mô hình, trong bảng Object Palette
nhấp vào dấu cộng tại mục Windows Object chọn Button, sau đó nhấp giữ chuột
kéo lê đến kích thước phù hợp thì thả chuột. khi hộp Button Configuration trong
khung Text nhập tên nút nhấn “ON”, sau đó nhấp chuột vào nút Font chọn Time
New Roman, rồi nhấp OK .
Tương tự ta tạo các nút nhấn OFF, NUT SU CO, các nút nhấn và các nút
CB….
Sau khi lấy xong các thiết bị cần thiết, tiến hành sắp xếp thành dây chuyền sản
xuất như sau:

66
Sau khi thiết kế ta tiến hành gán Tag cho các đối tượng. nhấp chuột phải vào
nút “ON” chọn Properties, hộp Object Properties xuất hiện, vì đây là nút nhấn
nên chọn Tab Events > Mouse. Trong khung bên phải nhấp chuột phải vào biểu
tượng ở hàng Press Left chọn C-Action
Hộp thoại Edit Action xuất hiện, chọn đường dẫn Internal Function > Tag
> Set. Sau đó nhấp đúp chuột vào SetTagBit.
Hộp thoại Assigning Parameters xuất hiện, chọn hàng Tag_Name rồi nhấp
vào nút vuông chọn Tag selection.

67
Cửa sổ Tags-Project xuất hiện chọn ON rồi nhấn OK.
Trở lại hộp thoại Assigning Parameters, nhập giá trị 1 cho hàng value ở cột
value. Sau đó nhấn OK chấp nhận.
Lúc này trên hộp thoại Edit Action xuất hiện Tag ON mang già trị 1, tiếp
theo nhấp đúp chuột vào SetTagBit để liên kết cho nút OFF và tương tự như thế ta

68
làm cho nút SU CO trong Tag của nút ON, nhưng trong hộp thoại Assigning
Parameters, nhập giá trị “0” cho hàng value ở cột value.
Sau khi kết nối xong, biểu tượng chuyển thành màu xanh.
Tương tự gán tag cho nút nhấn OFF, SU CO. Ở nút OFF thì gán Tag OFF
mang giá trị 1, còn Tag ON, Tag SU CO mang giá trị “0”.Ở nút SU CO thì gán Tag
SU CO mang giá trị 1, còn Tag ON, Tag OFF mang giá trị “0”. Còn các cảm biến
ta chỉ cần gán 1 Tag cảm biến với nút nhấn và nó mang giá trị “1”.
Tiếp theo gán các Tag cho các thiết bị, nhấp chuột phải vào động cơ chọn
Properties.
Hộp thoại Object Properties xuất hiện, chọn Tap Properties > Control
Properties. Sau đó nhấp chuột phải vào biểu tượng BlinkMode chọn Dynamic
Dialog.
Hộp thoại Dynamic Value ranges xuất hiện, nhấp chuột vào nút vuông ở
khung Expression/Formula chọn Tag.

69
Cửa sổ Tags-Project xuất hiện, nhấp đúp chuột chọn tag
“DONGCOCHINH”.
Trở lại hộp thoại Dynamic Value ranges, nhấp tùy chọn mục Boolean. Sau đó
nhấp đúp vào No Flashing cùng hàng Yes/True, rồi chọn Apply.
Tiếp theo gán tag cho đèn báo thang đi lên, nhấp chuột phải vào đối tượng làm
đèn báo cho thang đi lên, rồi chọn Properties.
Hộp thoại Object Properties xuất hiện, chọn thuộc tính Flashing. Trong
khung bên phải nhấp đúp vào mục Flashing Bacground đổi No thành Yes. Sau đó
nhấp đúp vào biểu tượng chọn Tag.

70
Hộp Tags-Project xuất hiện, nhấp đúp chuột chọn tag
“DENBAOBTDILEN”.
Trở lại hộp thoại Object Properties, ta thấy biểu tượng bóng đèn chuyển sang
màu xanh chứng tỏ đã liên kết thành công.
Tương tự, gán các Tag còn lại ứng với thiết bị trên mô hình. Sau khi gán Tag xong, tiến hình mô phỏng quan sát hoạt động của mô hình ĐIỀU KHIỂN THANG MÁY.

71
5.3 Chạy mô phỏng với WinCC
Để có thể điều khiển và quan sát trên WinCC phải có hỗ trợ S7-300, ta cần tiến hành như sau: Trở lại cửa sổ SIMATIC Manager nhấp vào biểu tượng simulation on/off mở chương trình mô phỏng.
Cửa sổ chương trình mô phỏng S7-PLCSIM-Simview1 xuất hiện, trên thanh
thuộc tính ta lần lược lấy các bảng hiển thị ngõ vào, ngõ ra, biến nhớ, timer.
Nhấp vào biểu tượng MRES, bảng thông báo MRES xuất hiện , hỏi bạn có muốn reset bộ nhớ cũ không, chọn Yes.

72
Sau đó trở lại giao diện thiết kế LAD, trên thanh công cụ chọn biểu tượng Download tải chương trình mới.
Để quan sát mạch chạy trên từng network chọn biểu tượng Monitor (on/off).
Trở lại giao diện Graphics Designer, nhấp vào biểu tượng Runtime để bắt đầu mô phỏng giám sát chương trình. Hoặc nhấp vào biểu tượng Active trong cửa sổ WinCCEplorer.
Để tiết kiệm thời gian và vật chất trên bài lý thuyết em chỉ mô phỏng vài
trường hợp tiêu biểu như sau:
� Thứ nhất: nhấn nút ON thì hệ thống hoạt động, sau đó có yêu cầu gọi thang
đi lên tại tầng hai, tại đây yêu cầu thang đi đến tầng năm và có yêu cầu gọi thang đi
xuống tại tầng bốn, tại tầng bốn yêu cầu thang đi đến tầng một.
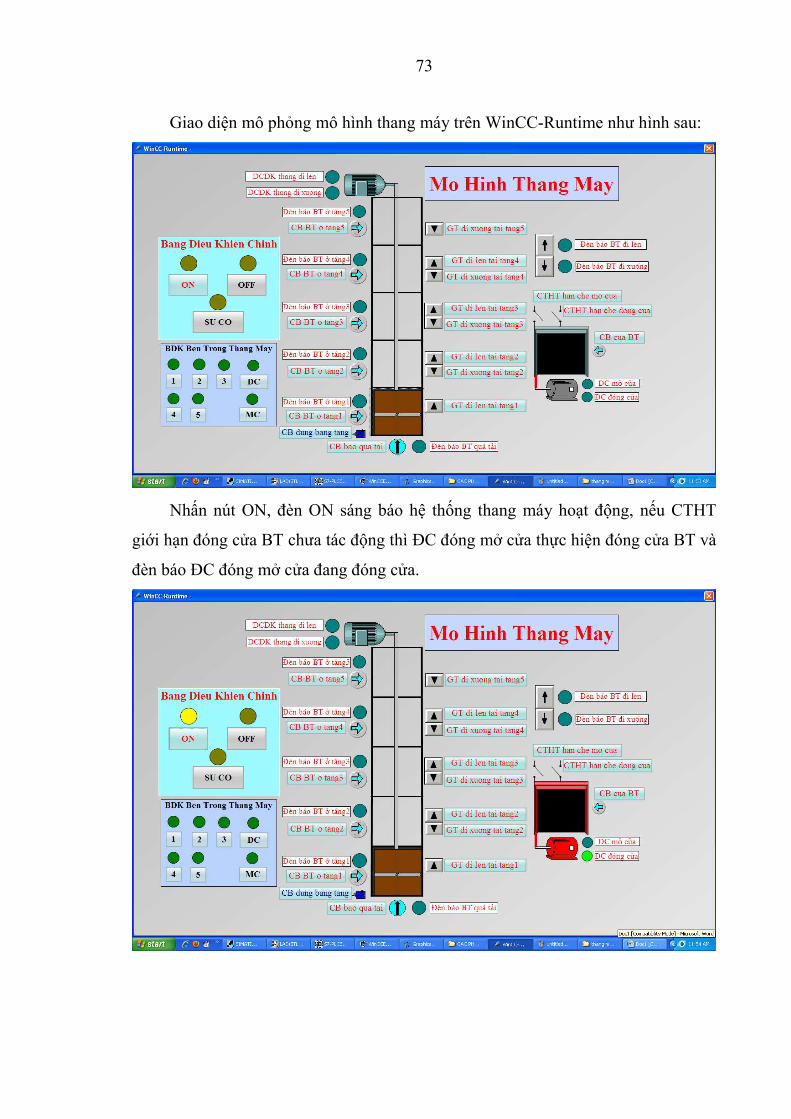
73
Giao diện mô phỏng mô hình thang máy trên WinCC-Runtime như hình sau:
Nhấn nút ON, đèn ON sáng báo hệ thống thang máy hoạt động, nếu CTHT
giới hạn đóng cửa BT chưa tác động thì ĐC đóng mở cửa thực hiện đóng cửa BT và
đèn báo ĐC đóng mở cửa đang đóng cửa.

74
Khi CTHT giói hạn đóng cửa tác động thì ĐC đóng mở cửa ngừng hoạt động,
BT đi xuống và đèn báo chiều BT đang đi xuống, đèn báo ĐC chính đang kéo BT đi
xuống.
Khi BT đi xuống bằng tầng một thì dừng và chờ yêu cầu phục vụ và đèn báo
BT ở tầng một.
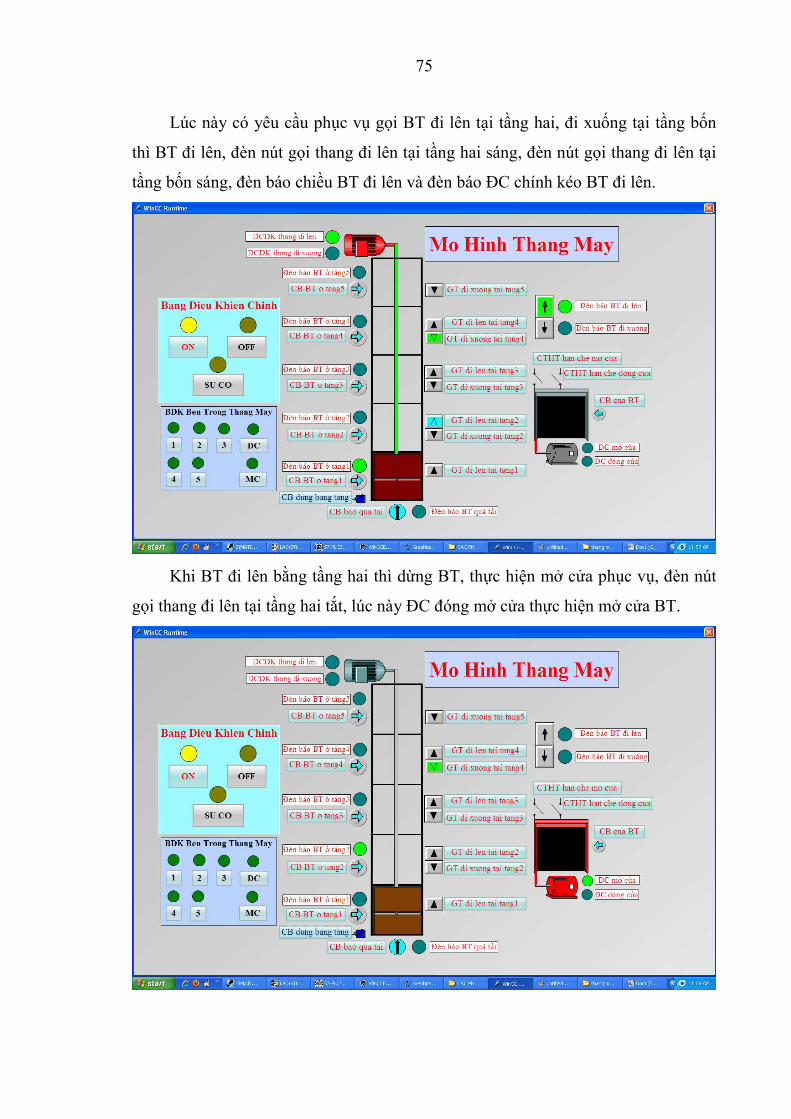
75
Lúc này có yêu cầu phục vụ gọi BT đi lên tại tầng hai, đi xuống tại tầng bốn
thì BT đi lên, đèn nút gọi thang đi lên tại tầng hai sáng, đèn nút gọi thang đi lên tại
tầng bốn sáng, đèn báo chiều BT đi lên và đèn báo ĐC chính kéo BT đi lên.
Khi BT đi lên bằng tầng hai thì dừng BT, thực hiện mở cửa phục vụ, đèn nút
gọi thang đi lên tại tầng hai tắt, lúc này ĐC đóng mở cửa thực hiện mở cửa BT.

76
Khi găp CTHT giới hạn mở cửa thì ĐC đóng mở cửa ngừng hoạt động, khi đó
có yêu cầu BT đến tầng năm, đèn nút yêu cầu đến tầng năm sáng.
Lúc này có yêu cầu đóng cửa BT nhanh (nút DC) thì ĐC đóng mở cửa thực
hiện đóng cửa, đèn báo đang đóng cửa BT.

77
Khi đóng cửa BT mà chạm CTHT giới hạn đóng cửa thì BT đi lên phục vụ yêu cầu tại tầng bốn và tầng năm.
BT đi lên cảm biến tại tầng ba tác động và đèn báo BT đang ở tầng ba.

78
Khi BT đi lên bằng tầng bốn thì dừng BT và thực hiện mở cửa BT phục vụ, lúc này ĐC đóng mở cửa thực hiện mở cửa, đèn báo ĐC mở cửa hoạt động và đèn báo BT đang ở tầng bốn.
Khi mở cửa gặp CTHT giới hạn mở cửa thì ĐC đóng mở cửa ngừng hoạt động, khi đó có yêu cầu BT đi đến tầng một và đèn nút yêu cầu BT đến tầng một sáng lên.

79
Lúc này có yêu cầu đóng cửa BT nhanh (nút DC) thì ĐC đóng mở cửa thực hiện đóng cửa lúc BT đang ở tầng bốn và đèn báo ĐC đóng mở cửa đang đóng cửa.
Khi đóng cửa chạm CTHT giới hạn đóng cửa thì BT đi lên phục vụ yêu cầu tại tầng năm, đèn báo chiều BT đi lên và đèn báo ĐC chính đang kéo BT theo chiều lên.

80
Khi BT đi lên bằng tầng năm thì dừng BT và thực hiện mở cửa BT phục vụ, lúc này ĐC đóng mở cửa thực hiện mở cửa BT, đèn báo ĐC mở cửa hoạt động và đèn báo BT đang ở tầng năm.
Lúc mở cửa gặp CTHT giới hạn mở cửa thì ĐC đóng mở cửa ngừng hoạt động.

81
Lúc này có yêu cầu đóng cửa BT nhanh thì ĐC đóng mở cửa thực hiện đóng cửa và đèn báo đang đóng cửa BT lúc BT đang ở tầng năm.
Lúc đóng cửa chạm CTHT giới hạn đóng cửa thì ĐC đóng mở cửa ngừng hoạt động, lúc này BT đi xuống phục vụ yêu cầu đến tầng một.

82
BT từ tầng năm đi xuống lần lúc này lần lượt các cảm biến tầng bốn, tầng ba, tầng hai tác động, các đèn báo BT đang đi qua các tầng tương ứng, đèn báo BT đang đi xuống.

83
Khi BT đi xuống bằng tầng một thì thực hiện mở cửa BT, lúc này ĐC đóng mở cửa thực hiện mở cửa BT, đèn báo BT đang mở cửa và đèn báo BT đang ở tầng một.

84
CTHT giới hạn mở cửa tác động trong lúc mở cửa thì ĐC đóng mở cửa ngừng hoạt động.
Cảm biến cửa tác động sau 5s thì ĐC đóng mở cửa thực hiện đóng cửa, đèn báo ĐC đóng mở cửa đang đóng cửa BT.

85
Khi gặp CTHT giới hạn đóng cửa thì ĐC đóng mở cửa ngừng hoạt động.
� Thứ hai: Ta nhấn OFF dừng hệ thống ngay lúc CTHT giới hạn đóng cửa tác
động lúc BT đang ở tầng một (theo đoạn mô phỏng như trên) thì hệ thống sẽ ngừng
ngay lập tức và Reset tất cả các biến nhớ, vì do lúc này BT không có yêu cầu phục
vụ nên phanh điện từ không có điện và ĐC đóng mở cửa không hoạt động.

86
� Thứ 3: giả sử BT đang tại tầng một có yêu cầu gọi thang đi xuống tại tầng
ba, khi thang đi lên tới tầng hai thì cảm biến sự cố phát hiện sự cố, lúc đó buồng
thang đi xuống lại bằng tầng một, dừng tại đó và Reset tất cả các biến nhớ.
Đèn báo nút gọi thang đi xuống tại tầng ba sáng, đèn báo chiều BT đi lên và
đèn báo ĐC chính đang kéo BT đi lên

87
Khi BT đi lên tầng hai thì có sự cố, lúc này đèn báo sự cố sáng, BT sẽ đi
xuống trở lại, đèn báo chiều BT đi xuống, đèn báo ĐC chính kéo BT đi xuống .
Khi BT đi xuống bằng tầng một dừng và Reset tấc cả các biến nhớ. Khi sự cố được khắc phục xong, nếu ta muốn hệ thống hoạt động tiếp thì ta nhấn ON để hệ thống hoạt động.

88
KẾT LUẬN VÀ KIẾN NGHỊ
Sau thời gian nghiên cứu thực hiện đồ án “MÔ PHỎNG ĐIỀU KHIỂN
THANG MÁY DÙNG SIMATIC PROTOOL/WINCC VÀ S7-300”, em có một số
kết luận và kiến nghị sau:
1. Kết luận
Các công việc đã hoàn thành:
- Tìm hiểu tổng quát về thang máy.
- Tìm hiểu về PLC Simatic S7-300: cấu trúc phần cứng của PLC S7-300, cấu
trúc bộ nhớ của PLC, phần mềm S7-300 dùng để lập trình cho PLC.
- Tìm hiểu về phần mềm Wincc.
- Lập trình bằng ngôn ngữ LADER trên phần mềm S7-300 để điều khiển thang
máy đơn năm tầng.
- Tạo giao diện trên Wincc mô hình thang máy.
- Chạy mô phỏng trên Wincc mô hình thang máy.
2. Kiến nghị
- Nếu có thời gian và điều kiện kinh tế thì đồ án tiếp tục thực hiện thi công mô
hình thang máy, dùng PLC viết chương trình điều khiển và dùng phần mềm Wincc
để giám sát.
- Ứng dụng việc lập trình trên S7-300 và các bộ PLC để điều khiển các hệ
thống tự động khác.

TÀI LIỆU THAM KHẢO
1. Phạm Quang Hiển - Nguyễn Thị Ngọc Loan - Phùng Thị Nguyệt (2009),
“Truyền Động Điện Và Trang Bị Điện Với Module Điều Khiển Lập Trình S7 –
Visu – WinCC”, Nxb Giao Thông Vận Tải.
2. Vũ Vân Hà - Phan Xuân Minh - Nguyễn Doãn Phước, “Tự động hóa với Simatic
S7-300”, Nxb Khoa học và kỹ thuật.
3. TS. Trần Thu Hà (chủ biên) - KS. Phạm Quang Huy, “Tự động hóa trong công
nghiệp với S7 và Protool”, Nxb Hồng đức.
4. Các website
http://www.dientuvietnam.net
http://plcvietnam.com.vn

PHỤ LỤC 1
� Đoạn chương trình khởi động hệ thống và Reset buồng thang xuống tầng một.


� Đoạn chương trình gọi thang đi lên tại các tầng và các đèn báo tương ứng.

� Đoạn chương trình gọi thang đi xuống tại các tầng và các đèn báo tương ứng.

� Đoạn chương trình yêu cầu thang đi lên khi thang đang ở các tầng nhỏ hơn.

� Các nhớ duy trì yêu cầu BT đến tầng ba, tâng bốn theo chiều lên.

� Đoạn chương trình yêu cầu thang đi xuống khi thang đang ở các tầng lớn hơn.

� Các nhớ duy trì yêu cầu BT đến tầng hai, tầng ba theo chiều xuống.

� Tổng hợp các bít nhớ yêu cầu buồng thang đến tầng một, tầng hai, tầng ba,
tầng bốn, tầng năm.

� Tín hiêu gọi thang đi lên tầng lớn hơn khi thang đang dừng các tầng nhỏ hơn.

� Tín hiêu gọi thang đi xuống tầng nhỏ hơn khi thang đang dừng tại các tầng lớn
hơn.

� Tổng hợp các tín hiêu làm thang đi lên tầng lớn hơn khi thang đang dừng tại
các tầng nhỏ hơn.
� Tổng hợp các tín hiệu làm cho thang đi xuống tầng nhỏ hơn khi thang đang
dừng tại các tầng lớn hơn.

� Tổng hợp các tín hiệu làm cho thang đi lên và tín hiệu tạo trễ ưu tiên cho thang
đi lên.

� Tổng hợp các tín hiệu làm cho thang đi xuống và tín hiệu tạo trễ ưu tiên cho
thang đi xuống.

� Dừng buồng thang khi thang đi lên đến tầng hai và tắt các đèn báo yêu cầu
phục vụ tại tầng hai.

� Dừng buồng thang khi thang đi lên đến tầng ba và tắt các đèn báo yêu cầu
phục vụ tại tầng ba.

� Dừng buồng thang khi thang đi lên đến tầng bốn và tắt các đèn báo yêu cầu
phục vụ tại tầng bốn.

� Dừng buồng thang khi thang đi lên đến tầng hai và tắt các đèn báo yêu cầu
phục vụ tại tầng hai.

� Dừng buồng thang khi thang đi xuống đến tầng một và tắt các đèn báo yêu cầu
phục vụ tại tầng một.

� Dừng buồng thang khi thang đi xuống đến tầng hai và tắt các đèn báo yêu cầu
phục vụ tại tầng hai.

� Dừng buồng thang khi thang đi xuống đến tầng ba và tắt các đèn báo yêu cầu
phục vụ tại tầng ba.
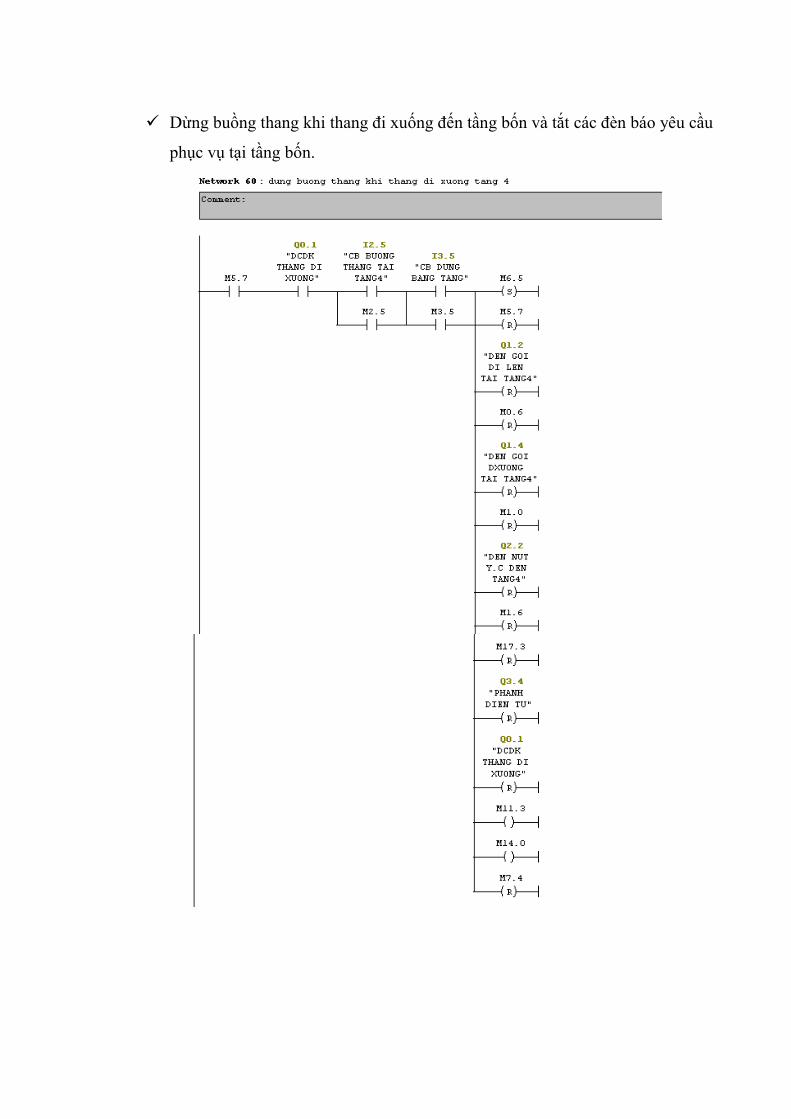
� Dừng buồng thang khi thang đi xuống đến tầng bốn và tắt các đèn báo yêu cầu
phục vụ tại tầng bốn.

� Bit nhớ duy trì cảm biến dừng bằng tầng I3.5
� Tín hiệu mở cửa nhanh BT.

� Mở cửa BT.
� ĐC mở cửa BT ngừng hoạt động chạm CTHT giới hạn mở cửa.
� Tín hiệu để thực hiện đóng cửa BT bởi cảm biến cửa BT.

� Yêu cầu đóng cửa BT nhanh.
� ĐC đóng mở cửa BT thực hiện đóng cửa BT và ngừng khi chạm CTHT giới
hạn đóng cửa
� Đoạn chương trình nhận biết quá tải BT và xóa quá tải sau 20s.

� ĐC điều khiển thang đi lên và đi xuống.
� Biến nhớ duy trì CB BT tại tầng một và đèn báo BT ở tầng một.

� Biến nhớ duy trì CB BT tại tầng hai và đèn báo BT ở tầng hai.

� Biến nhớ duy trì CB BT tại tầng ba và đèn báo BT ở tầng ba.
� Biến nhớ duy trì CB BT tại tầng bốn và đèn báo BT ở tầng bốn.

� Biến nhớ duy trì CB BT tại tầng năm và đèn báo BT ở tầng năm.

� Đèn báo nút yêu cầu BT đến tầng một.
� Đèn báo nút yêu cầu BT đến tầng hai.
� Đèn báo nút yêu cầu BT đến tầng ba.
� Đèn báo nút yêu cầu BT đến tầng bốn.
� Đèn báo nút yêu cầu BT đến tầng năm.

� Đoạn chương trình dừng hệ thống thang máy và Reset tất cả các biến nhớ.
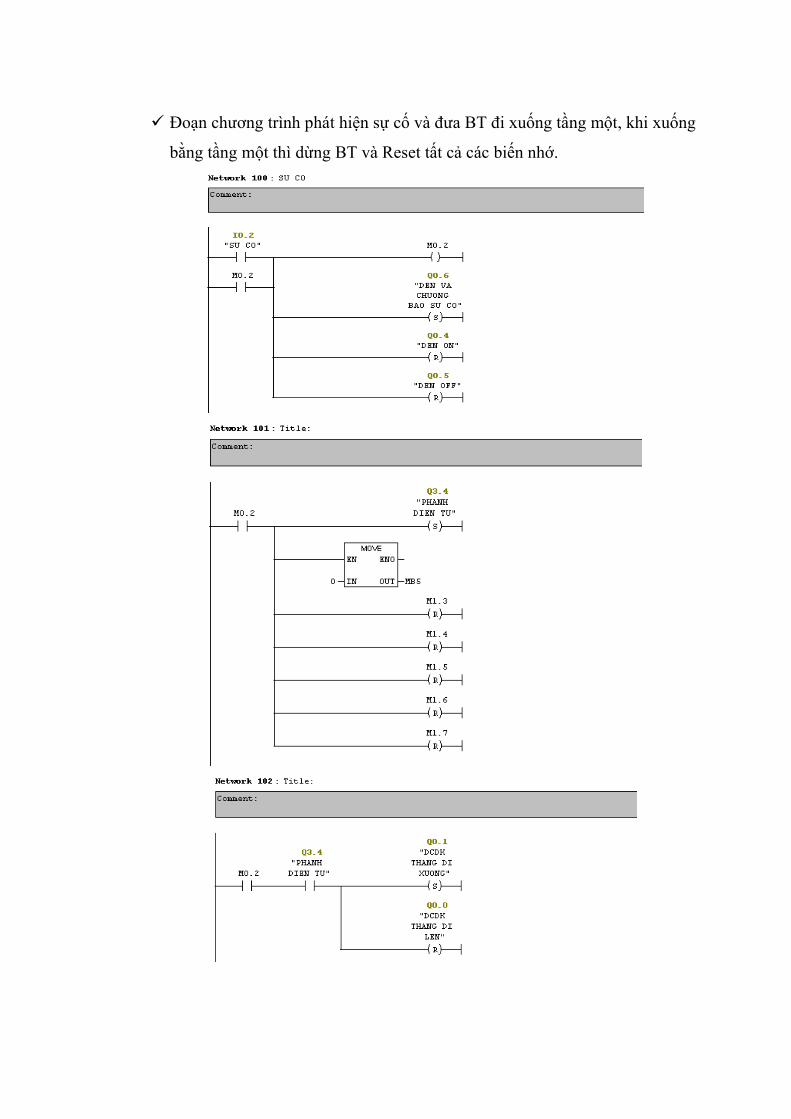
� Đoạn chương trình phát hiện sự cố và đưa BT đi xuống tầng một, khi xuống
bằng tầng một thì dừng BT và Reset tất cả các biến nhớ.






























