-
8/12/2019 DC Lecture8
1/29
Lecture # 8
Equalization
-
8/12/2019 DC Lecture8
2/29
To compensate for channel induced ISI we use a process known
as
Equalization: a technique of correcting the frequency response
of
the channel The filter used to perform such a process is called
an equalizer
Since HR(f) is matched to HT(f), we usually worry about
HC(f)
The goal is to pick the frequency response HEQ(f) of the
equalizer
such that
where
and the phase characteristics
)(
)(1)(1)()(
fj
C
EQEQcce
fHfHfHfH
|)(|
1|)(|
fHfH
C
EQ )()( ff CEQ
3 4 Equalization
-
8/12/2019 DC Lecture8
3/29
Equalization Process Apply a filter that results in an equalized
impulse response having
zero ISI and channel distortion.
This means that convolution of the channel impulse response
andthe equalizer impulse response must equal 1 at the center tap
andhave nulls at the other sample points within the filter
span.
It can be difficult to determine the inverse of the channel
response if
the channel response is zero at any frequency, then the inverse
is
not defined at that frequency.
The receiver generally does not know what the channel response
is.
Channel changes in real time so equalization must be
adaptive
The equalizer can have an infinite impulse response even if
the
channel has a finite impulse response
The impulse response of the equalizer must usually be
truncated
Problems with Equalization
-
8/12/2019 DC Lecture8
4/29
Equalization Techniques or Structures Three Basic Equalization
Structures
Linear Transversal Filter Simple implementation using Tap Delay
Line or FIR filters
FIR filter has guaranteed stability (although adaptive
algorithm
which determines coefficients may still be unstable)
Decision Feedback Equalizer
Extra step in subtracting estimated residual error from
signal
Maximal Likelihood Sequence Estimator (Viterbi)
Optimal performance
High complexity and implementation problem (not heavily
used)
-
8/12/2019 DC Lecture8
5/29
-
8/12/2019 DC Lecture8
6/29
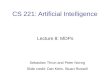
Linear Transversal Equalizer This is simply a linear filter with
adjustable parameters
The parameters are adjusted on the basis of the measurement
ofthe channel characteristics
A common choice for implementation is the transversal fi l
ter(TapDelay Line) or the FIR filter with adjustable tap
coefficient
Total number of taps = 2N+1
Total delay = 2Nt
Fig. 3.26
-
8/12/2019 DC Lecture8
7/29
N is chosen sufficiently large so that equalizer spans length of
the ISI.
Normally the ISI is assumed to be limited to a finite number of
samples
The output ykof the Tap Delay Line equalizer in response to the
inputsequence {xk} is
where cnis the weight of the nthtap
Ideally, we would like the equalizer to eliminate ISI resulting
in
But this cannot be achieved in practice.
N
Nnnknk NNkxcy 2,......2,
0,0
0,1
k
kyk
-
8/12/2019 DC Lecture8
8/29
However, the tap gains can be chosen such that
There are two types of such equalizer (i.e., linear
equalizers)
Preset Equalizer:
Transmits a training sequence that is compared at the
receiver
with a locally generated sequence Requires an initial training
sequence
Differences between sequences are used to update the
coefficient cnAdaptive Equalizer:
Equalizer adjust itself periodically during transmission of
data
The tap weights constitute the adaptive filter coefficient
Nk
kyk
,......2,1,0
0,1
-
8/12/2019 DC Lecture8
9/29
The two techniques can be combined into a robust equalizer. In
this
case, there are two modes of operation:
Training Mode
For the training mode, a known sequence is transmitted and a
synchronized version is generated at the receiver
Decision -directed mode
When training mode is complete, the adaptive algorithm is
switched on The tap weights are then adjusted with info from
training mode
The impulse response of the transversal filter is
N
Nn
fnj
neq
N
Nn
neq
ecfH
ntcth
t
t
2)(
)()(
-
8/12/2019 DC Lecture8
10/29
Ifx(t) is the signal pulse corresponding to
then the equalized output signal is
Nyquist zero ISI condition implies that
)()()()( fHfHfHfX RCT
N
Nnn ntxcty )()(
t
Nk
knkTxckTyyN
Nn
nk,....,2,1,0
0,1)()( t
-
8/12/2019 DC Lecture8
11/29
Since there are 2N+1 equalizer coefficients, we may express
inmatrix form as:
y=Xc
where:
X = (2N+1) x(2N+1) matrix with elementsx(kT - nt)
c = (2N+1) column coefficient vector
y = (2N+1) column vector
Since this design forces the ISI to be zero at sampling instants
t =kT, the equalizer is called zero-for cin g equalizer (ZFE)
Thus we obtain a set of (2N+1) linear equations for the ZFE
In Figure 3.26 tis chosen as high as T
t= T Symbol-spaced equalizer; t< T
Fractional-spacedequalizer
-
8/12/2019 DC Lecture8
12/29
Zero-Forcing Solution
For N=1
))1(0())0(0())1(0()0(,0 101 xcxcxcyk
))1(1())0(1())1(1()1(,1101 cxcxcyk
))1(1())0(1())1(1()1(,1 101 xcxcxcyk
1
0
1
)0()1()2(
)1()0()1(
)2()1()0(
)1(
)0(
)1(
c
c
c
xxx
xxx
xxx
y
y
y
1)12()12()12( NNN
-
8/12/2019 DC Lecture8
13/29
For N=2
Generalizing results:
2
1
1
2
0
)0()1()2()3()4(
)1()0()1()2()3(
)2()1()0()1()2(
)3()2()1()0()1(
)4()3()2()1()0(
)2(
)1(
)0(
)1(
)2(
c
c
c
c
c
xxxxx
xxxxx
xxxxx
xxxxx
xxxxx
y
y
y
y
y
1
0
1
0
Nforwhere z
zXc 1
-
8/12/2019 DC Lecture8
14/29
Minimum MSE Solution
A more robust equalizer can be obtained if {cn} tap weights
are
chosen to minimize the mean square error(MSE) of all ISI terms
plusnoise power at the output of equalizer
MSE is defined as:
the expected value of the squared difference between
the desired data symbol and estimated data symbol
Whereas xc )()( nzne
]|)([| 2neEMSE
])()([ 2 cx2xccx TTT nznzE
-
8/12/2019 DC Lecture8
15/29
cxcxxc TTT2 ])([2][)]([ nzEEnzE
cRccRx
T
xx zz 22
0
c
MSE
022 xxx RcR z
xxxRRc z1
-
8/12/2019 DC Lecture8
16/29
Deterministic Case:
Example 3.6: A Minimum 7-Tap Equalizer
Consider that the tap weights of an equalizing transversal
filter are
to be determined by transmitting a single impulse as a
trainingsignal. Let the equalizer circuit be made up of 7 taps.
Given areceived distorted set of pulse samples{x(k)}, with values
0.0108, -0.0558, 0.1617,1.0000, -0.1749, 0.0227, 0.0110, use a
minimumMSE solution to find the weights {cn} that will minimize the
ISI. Withthese weights, calculate the resulting values of the
equalized pulse
samples at the following times:
What is the largest magnitude sample contributing to ISI, and
what isthe sum of all the ISI magnitudes?
T
x xR )(nzz
xxR T
xx
}6.....,,2,1,0{ k
-
8/12/2019 DC Lecture8
17/29
Solution: For a 7-tap filter (N=3)
Dimensions for matrix x will be 4N+1 by 2N+1 = 13x7
0108.0000000
0558.00108.000000
1617.00558.00108.000000000.11617.00558.00108.0000
1749.00000.11617.00558.00108.000
0227.01749.00000.11617.00558.00108.00
0110.00227.01749.00000.11617.00558.00108.0
00110.00227.01749.00000.11617.00558.0
000110.00227.01749.00000.11617.0
0000110.00227.01749.00000.1
00000110.00227.01749.0
000000110.00227.0
0000000110.0
x
-
8/12/2019 DC Lecture8
18/29
Using matrix x, form autocorrelation matrix Rxxand cross
correlation matrix Rzx. Solution for tap weights is:
Using these weights, the 13 equalized samples {y(k)} at
times
:
The largest magnitude sample contributing to ISI : 0.0095 The
sum of all the ISI magnitudes : 0.0195
}{ ,3,2,1,0,1,2,3 ccccccc
0269.0,0670.0,1318.0,9495.0,1659.0,0108.0,0116.0
}6.....,,2,1,0{ k
0003.0,0022.0,0095.0,0015.0,0007.0
,0003.0,0000.1,0000.0,0000.0,0007.0,0041.0,0001.0,0001.0
-
8/12/2019 DC Lecture8
19/29
Steepest Descent Algorithm
Difficult to find the inverse of a large matrix.
Use gradient based iterative techniques Cost function
Start with an initial estimate of c0and update it bymoving in
the opposite direction of the gradient of J.
Keep on updating the old estimate till convergence
isreached.
]|)([| 2neEMSEJ
cRccR xT
xx zz 22
-
8/12/2019 DC Lecture8
20/29
Steepest Descent Algorithm
-
8/12/2019 DC Lecture8
21/29
Steepest Descent Algorithm
Consider the coefficients:
The steepest descent algorithm is given by:
Where
If we use instantaneous estimate of we have:
Which is called the LMS algorithm. As in the previous case zis
the
desired signal andx is the received signal.
],........,,......,[ 0 NN ccc
iii 2
11cc
)(2 zxi
xx
iRcR
i
))((2 TT xcxx nzii
-
8/12/2019 DC Lecture8
22/29
clear all;close all
L=3; % Signal Duration in seconds
fs=8000; % Sampling frequencyN=21; % Number of filter taps
%Training Signal
z=rand(1,L*fs);
% Impulse response of the channel
h=[1,0.7,0.2,-0.5,-0.8,-0.4,0,0.25,0.1,0.05,0,0];
x_r=filter(h,1,z);
% Intialization
% Delay line
x=zeros(1,N);
% Filter Coefficients
c=zeros(1,N);
% Step Size
mu=0.001;
Matlab Example :
-
8/12/2019 DC Lecture8
23/29
% LMS Algorithm
for n=1:L*fs
x=[x(2:N) x_r(n)];
e(n)=z(n)-c*x;
c=c+mu*e(n)*x;
end
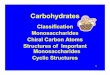
figure(1)
H=fftshift(fft(h,fs));H=abs(H);H=H/max(H);
plot(0:fs/2-1,H(fs/2+1:fs));hold on
Cf=fftshift(fft(c,fs));Cf=abs(Cf);Cf=Cf/max(Cf);
plot(0:fs/2-1,Cf(fs/2+1:fs),'r');grid;xlabel('Frequency
(Hz)');
gtext('|H(f)|')gtext('|C(f)|')
-
8/12/2019 DC Lecture8
24/29
0 500 1000 1500 2000 2500 3000 3500 40000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency (Hz)
|H(f)|
|C(f)|
Results:
-
8/12/2019 DC Lecture8
25/29
Training Mode vs. Decision Directed mode
-
8/12/2019 DC Lecture8
26/29
Fractionally Spaced Equalizer
The spectrum property of the baud-rate and fractionally spaced
equalizer.
-
8/12/2019 DC Lecture8
27/29
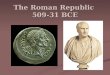
Decision Feedback Equalizer A decis ion -feedback
equalizer(DFE)is a nonlinear equalizer that
employs previous decisions to eliminate the ISI caused by
previously detected symbol It consists of a feedforward section
a feedback section and a
detector connected together as shown
The filters are usually fractionally spaced FIR with adjustable
tapcoefficients
The detector is a symbol-by-symbol detector
-
8/12/2019 DC Lecture8
28/29
DFE is based on the principle that once you have determined
the
value of the current transmitted symbol, you can exactly remove
the
ISI contribution of that symbol to future received symbols
The nonlinear feature is due to the decision device, which
attempts
to determine which symbol of a set of discrete levels was
actually
transmitted.
Once the current symbol has been decided, the filter structure
can
calculate the ISI effect it would tend to have on subsequent
received
symbols and compensate the input to the decision device for
the
next samples.
This postcursor ISI removal is accomplished by the use of a
feedback filter structure.
-
8/12/2019 DC Lecture8
29/29
Adaptive Equalization for Digital CellularTelephony The direct
sequence spreading employed by CDMA (IS-95) obviates
the need for a traditional equalizer.
The TDMA systems (for example, GSM and IS-54), on the other
hand, make great use of equalization to contend with the effects
of:
multipath-induced fading,
ISI due to channel spreading,
additive received noise,
channel-induced spectral distortion, etc
Of the nonlinear equalizers, the DFE is currently the most
practical
system to implement in a consumer system. Other designs that
outperform the DFE in terms of convergence or
noise performance, but these generally come at the expense
of
greatly increased system complexity.