Embed Size (px)
Citation preview

University of the Ryukyus JAPAN
Modeling-Based Design of Intelligent Control
Paradigms for Modern Wind Generating Systems
by
MUHANDO, Billy Endusa
A dissertation submitted to the Graduate School of Engineering and Science in partial fulfillment of the requirements for the degree of
Doctor of Engineering
in
Interdisciplinary Intelligent Systems Engineering
March 2008


Copyright by MUHANDO, Billy Endusa
March 2008

Preface
GERMAN physicist Albert Einstein (1879-1955), who fancied himself as a violinist, was re-
hearsing a Haydn string quartet. When he failed for the fourth time to get his entry in the
second movement, the cellist looked up and said, “The problem with you, Albert, is that you sim-
ply can’t count—what is your occupation anyhow?” to which he answered that he (Einstein) was an
artist’s model, reflecting his feeling that he was constantly posing for sculptures and paintings.
Einstein’s conundrum aside, modeling has been embraced by engineers of various persuasion in
systems’ design, and forms the basis of control design for wind generating systems in this research.
The dissertation has been submitted in partial fulfillment of the requirements for the degree of Doctor
of Engineering in Interdisciplinary Intelligent Systems. It has been prepared in Japan at the Power
Energy System Control (PESC) Laboratory of the Electrical & Electronics Department, Faculty of
Engineering, University of the Ryukyus. The project has been carried out as a harmonization between
the Laboratory’s core research areas (Power Systems, Power Electronics, and Control Systems) with
Sustainable Energy. The dissertation is a condensed report based on investigation of generator torque
control for optimal performance of a three-bladed, variable-speed wind generating system with active
pitch regulation. It is based on articles published or submitted to peer-reviewed journals during the
period of the PhD project. The problem definition, methodology and steps leading to solutions to the
problems, and finally the results, are presented in a concise manner outlined in two parts.
The first part of the dissertation is concerned with modeling the aerodynamic conversion system.
As an introduction, a brief rundown is offered on recent trends in world energy demand, the integration
of wind energy in the global energy mix, challenges to the wind industry, and the problems thereof.
Modeling the various wind turbine subsystems — wind speed and power train system (comprising
the electrical and mechanical parts) — aims to provide an argumentative framework for a prototype
that can be independently evaluated for validation. The main contribution is the harmonization of the
various state-space models with varying dynamics to facilitate multiobjective controller design.
The second part deals with optimal controller design based on some defined control strategies.
It discusses the potential of several advanced intelligent control paradigms for meeting the two con-
tradictory control objectives: power conversion maximization and active attenuation of structural-
dynamic load-oscillations as well as static loads of the drive-train. Computer simulations executed
in C-programming and MATLAB/Simulink™ environments confirm the efficacy of the paradigms
(albeit often in amalgamated configurations) when applied to the developed performability models.
i

ii
In 1985 I came across A. F. Abbott’s book: Ordinary Level Physics, at my brother Clyde’s room.
Unaware of the fact that I would not return it for two years and only then under threat of severe
penalty, Clyde let me borrow it. I am glad he did. Around the same time I was enrolled in junior high
at the Alliance High School. Physics at this level was an interesting and at the same time frustrating
experience. Looking back, the book was elemental in arousing my thinking about machines and
very deeply influenced me in pursuing a career in engineering. My time in studying and practising
engineering has been intellectually stimulating, thought-provoking, challenging and above all, fun,
mostly thanks to practising engineers I have met in the field including Kenya, Belgium, and Japan.
Thanks are due first to Prof Tomonobu Senjyu — my doctoral studies supervisor — for his great
insights, perspectives, and sense of humor. Prof Senjyu, as always, both challenged me and guided
me throughout my thesis work, kept me abreast of current work in wind turbine research and helped
put this work on a strong foundation by facilitating presentation of our research results in various
colloquiums across the globe. My sincere thanks go to both Prof Hiroshi Kinjo and Prof Tetsuhiko
Yamamoto (formally) of Mechanical Systems Engineering who dedicated their time in seeing me
through the two-year masters course leading to an M.Eng degree. They particularly inducted me to
life in Japan, showed me the essence of research in control engineering, and encouraged me to publish
and make presentations at national and international symposia.
Special thanks go to dissertation committe member, Prof Koji Kurata for his time in reviewing
this manuscript. Sincere gratitude is also extended to members of the academia at the University
of the Ryukyus who have influenced my work and made this educational process a success, notably
Prof R. M. Alsharif, Dr N. Urasaki, Dr K. Nakazono, Ms A. Kelly (for Japanese language tutorship),
and members of the PESC laboratory who offered a conducive environment for research. I have been
humbled by the altruistic commitment of Messrs. S. Murata and H. Arizono who were instrumental in
my expertise in C-language, GNU-Plot, and (typesetting in) LATEX 2ε—the scientific word processor
that effortlessly couples magnificent layout with user-unfriendliness of varying degrees!
Of course none of this would have been possible without support from the following. Firstly,
my parents: my Mom and dad’s loving encouragement (may your souls rest in peace) and inspira-
tion (dad’s) at a young age to be a scientist. Secondly, my partner Senta Judy Haron, whom I can
never thank enough for her endless love, company and encouragement. Last but not least, the Japan
Ministry for Education, Culture, Sports, Science and Technology (文部科学省) for advancing me the
Monbukagakusho (MEXT) scholarship for my 5-year graduate (master and doctoral) studies.
Okinawa, Japan. March 2008 Muhando, B. E.

Abstract
AGAINST the backdrop of increasing awareness of the effects of global warming due to green-
house gas emissions and with fossil-fuel prices on the rise and their supply increasingly un-
stable, the need for more environmentally benign electric power systems is a critical part of the new
thrust of engineering for sustainability. To address security of supply and energy diversification, wind
energy is regarded the most attractive vanguard of the world’s energy challenges as it is clean, fuel-
free (produces no CO2), and a renewable source of power. Wind plants have benefited from steady
advances in technology, and much of the advance has been made in the components dealing with the
utility interface, the electrical machine, the power electronic converter, and the control capability.
Wind turbines have become the most cost-effective renewable energy systems available today and
are now completely competitive with essentially all conventional generation systems. However, the
major problem is the wind’s unpredictable nature that forces utility operators to think differently about
power generation, with the main challenge being to provide governor functions and controlled ramp-
down during high wind speed events. Additionally, wind turbines present nonlinear dynamic behav-
ior and lightly damped resonant modes. This thesis examines design of advanced control paradigms
geared toward lessening the negative impact of wind stochasticity on modern MW-class wind en-
ergy conversion systems (WECS) during high turbulence. The main control design objectives are to
maximize power conversion throughout the operating envelope for steady output power as well as to
actively attenuate structural-dynamic load-oscillations of the drive-train.
The proposed advanced paradigms include the linear quadratic Gaussian (LQG), artificial neural
networks (ANNs) in form of neurocontrollers, the self-tuning regulator (STR), and a model-based
predictive control (MBPC) scheme. These yield, singly or in combination, digital systems whereby
control is exercised through regulation of generator torque. Their design is enhanced by modeling:
the plant and its environment are structured as a system of interacting subsystems that constitute an
equivalent model defined in state space. The disturbance (input) signal is the wind that is modelled
as a stochastic process constituted by the seasonal mean wind speed and the instantaneous turbulence
component, while drive-train components (turbine, gearing and generator subsystems) are represented
as a series of inertias linked by ‘soft’ shafts without friction.
Computer simulations conducted using the MATLAB/Simulink™ software, with the generator
model as an interface between the mechanical and electrical characteristics of the WECS reveal that
achieving the objectives of optimal operation for reliability by the proposed multiobjective schemes
becomes more attractivevis-a-vis the classical proportional-integral-derivative (PID) controller.
iii

Glossary
I. Acronyms and Abbreviations
(A)NN (artificial) neural network
ARMA auto-regressive moving average
CF capacity factor
COE cost of energy
CSS constrained stochastic simulation
DOIG double output induction generator
FSIG fixed speed induction generator
GHGs greenhouse gas emissions
GSC grid side converter
HAWT horizontal axis wind turbine
LQ linear quadratic
LQG linear quadratic Gaussian
MBPC model-based predictive control
MPPT maximum power point tracking
NC neurocontroller
OP operational point
PI proportinal-integral (controller)
PID proportinal-integral-derivative
RSC rotor side converter
Std The IEC61400-1 Standard
STR self-tuning regulator
VAWT vertical axis wind turbine
VSIG variable speed induction generator
WECS wind energy conversion system
iv

v
II. Nomenclature
Notation for various symbols is defined as they occur in the text, however, the following are the
common ones encountered across chapters:
α stator firing angle σ standard deviationβ rotor collective pitch τ actuator time constantΓ torque ϕ hidden neuron outputθ torsional angular twist Ψ fluxλ tip-speed ratio (TSR) ω rotor speedµw seasonal mean wind speed ∆ deviation from referenceξ Gaussian noise ∆t simulation time stepρ air density Λ area of rotor disk
c Weibull scale parameter A state matrixcP power coefficient B control input gain matrixcT torque coefficient C relates plant output to statesf0 mechanical eigenfrequency C(s) controller transfer functionfn grid nominal frequency Ds drive-train torsional damping coefficientird,rq rotord- andq-axis current G gain in full state feedback lawisd,sq statord- andq-axis current J quadratic cost functionk Weibull shape parameter Jg generator mass moment of inertiakω partial derivative ofΓt w.r.t. rotor speed Jt rotor mass moment of inertiakvw partial derivative ofΓt w.r.t. wind speed Ks drive-train torsional spring stiffnesskβ partial derivative ofΓt w.r.t. pitch angle Kp classical controller proportional gainrr rotor resistance Ki classical controller integral gainrs stator resistance P weighting on the statesxt time Pe WECS electrical poweru control input Pm WECS mechanical powerurd,rq rotord- andq-axis voltage Pr WECS rated powerusd,sq statord- andq-axis voltage Q weighting on the inputuvr rated (design) wind speed for WECS R rotor radiusvt perturbed wind disturbance Vhub wind speed at hub heightvw free-stream wind speed Xm mutual reactancex state vector Xr rotor reactancey control (or measured) output Xs stator reactance
Notes:
1. The subscriptOP is used to denote the operating point (value of respective quantity at control
design point).
2. The superscriptsx andx denote the first and second derivatives ofx w.r.t. time, i.e.d/dt and
d2/dt2 respectively, whilex represents the estimated value ofx, an arbitrary dynamic quantity.

Contents
I Analytic Models for Wind Energy Conversion Systems 1
1 Introduction 2
1.1 Background .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 WECSs Generation Technologies . . . .. . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 WECS Siting . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.2 WECS Configurations . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.3 WECS Control . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Problem Identification . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.5 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.6 Goals and Scope of Present Work . . . .. . . . . . . . . . . . . . . . . . . . . . . . 11
1.6.1 Aim of the Work .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.6.2 Scientific and Technological Contribution of this Work . .. . . . . . . . . . 11
1.6.3 Outline of Presentation . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 12
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2 Aerodynamic Conversion Modeling 18
2.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2 Theoretical Development for Aerodynamic Conversion . . . . . .. . . . . . . . . . 19
2.2.1 Energy Extraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.2 Power Curve . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.3 Electrical Output Model . . . .. . . . . . . . . . . . . . . . . . . . . . . . 22
2.2.4 Capacity Factor . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 Turbine Linearization for Steady-state Analysis . . .. . . . . . . . . . . . . . . . . 24
2.4 Remarks . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
vi

vii
3 Drive-train Modeling 29
3.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2 Power train Modeling Concept . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 30
3.3 Mechanical State Space System . . . .. . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Drive-train Torque Dynamics . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 34
3.4.1 Steady-state Operation . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 34
3.4.2 Operation under High Turbulent Inflow . . .. . . . . . . . . . . . . . . . . 35
3.5 Remarks . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4 Electrical System Modeling 38
4.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2 Detailed Model of DOIG Unit with Converters . . .. . . . . . . . . . . . . . . . . 39
4.2.1 Construction and Operation Principle . . . .. . . . . . . . . . . . . . . . . 39
4.2.2 DOIG: Electrical Model . . . .. . . . . . . . . . . . . . . . . . . . . . . . 41
4.2.3 DOIG: a Mechanical Perspective. . . . . . . . . . . . . . . . . . . . . . . . 46
4.3 DOIG Operation under Steady-state and Fault Conditions . . . . .. . . . . . . . . . 47
4.3.1 Steady-state Analysis . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 47
4.3.2 Transient Response and Fault-ride-through Analysis . . .. . . . . . . . . . 48
4.4 Remarks . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5 Modeling Wind Field Dynamics 52
5.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.2 Determination of Mean Wind Speed,vm . . . . . . . . . . . . . . . . . . . . . . . . 53
5.3 CSS Model for Wind Turbulence,vt(t) . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.3.1 Formulating the Turbulence . .. . . . . . . . . . . . . . . . . . . . . . . . 55
5.3.2 Setting the Constraints . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 57
5.4 Real-time Wind Speed Profile . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 58
5.5 Remarks . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60

viii
II Control Strategies and Design for Wind Energy Conversion Systems 62
6 Control Philosophy 63
6.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.2 Control Concept . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2.1 Model Overview .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2.2 Control Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.3 Control Strategy . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3.1 Active Power Control . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 68
6.3.2 Power-train Torsional Load Alleviation . . .. . . . . . . . . . . . . . . . . 68
6.4 Controller Design . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4.1 Assigning the Control Tasks . .. . . . . . . . . . . . . . . . . . . . . . . . 69
6.4.2 Pitch Actuator and Blade Servo. . . . . . . . . . . . . . . . . . . . . . . . 70
6.4.3 Generator Torque Controller . .. . . . . . . . . . . . . . . . . . . . . . . . 72
6.5 Conclusions .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7 Full-State Feedback Digital Control by LQG 78
7.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2 State Development for the Power-train .. . . . . . . . . . . . . . . . . . . . . . . . 80
7.3 LQG Controller Design . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
7.3.1 State Estimation and LQG Design . . . . . .. . . . . . . . . . . . . . . . . 82
7.3.2 Choice of Weighting Matrices for LQG Cost Function,J . . . . . . . . . . 84
7.3.3 Solution of the Stochastic Linear Regulator Problem . . .. . . . . . . . . . 85
7.4 Hybrid Controller Design .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.4.1 NC Architecture .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.4.2 NC Training . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
7.5 Simulation Results . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
7.5.1 Tracking Performance by Proposed Technique . . . . . .. . . . . . . . . . 90
7.5.2 Optimization of Power Output .. . . . . . . . . . . . . . . . . . . . . . . . 92
7.5.3 Minimization of Shaft Torsional Torque . . .. . . . . . . . . . . . . . . . . 94
7.6 Conclusion .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95

ix
8 Predictive Control I: STR 97
8.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
8.2 WECS Multi-objective Control Concept. . . . . . . . . . . . . . . . . . . . . . . . 99
8.3 STR Design and Implementation . . . .. . . . . . . . . . . . . . . . . . . . . . . . 100
8.3.1 Outer Loop: Parameter Estimation . . . . . .. . . . . . . . . . . . . . . . . 101
8.3.2 Inner Loop: Control Law,Γg ,ref . . . . . . . . . . . . . . . . . . . . . . . . 104
8.4 Simulation Analysis . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
8.4.1 Control for Energy Extraction .. . . . . . . . . . . . . . . . . . . . . . . . 105
8.4.2 Control for Load Alleviation . .. . . . . . . . . . . . . . . . . . . . . . . . 107
8.5 Conclusion .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
9 Predictive Control II: MBPC 111
9.1 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
9.2 Control Concept for Power Regulation .. . . . . . . . . . . . . . . . . . . . . . . . 113
9.3 Generator Torque Control .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
9.3.1 Γg ,ref by MBPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
9.3.2 Γg ,ref by PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
9.4 Simulation Analysis . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
9.4.1 Aerodynamic Power Production. . . . . . . . . . . . . . . . . . . . . . . . 121
9.4.2 Drive-train Torque Variation Minimization .. . . . . . . . . . . . . . . . . 122
9.4.3 Comparison: MBPC and Classical PID . . .. . . . . . . . . . . . . . . . . 123
9.4.4 Evolution of Electrical Parameters . . . . . .. . . . . . . . . . . . . . . . . 124
9.5 Conclusion .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
10 Analysis, Perspectives, and Conclusions 128
10.1 Preamble . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
10.2 Modeling: an Overview . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
10.3 WECS Modeling: Assessment of Approach and Validation . . . .. . . . . . . . . . 133
10.4 Control: an Appraisal of Classical and Advanced Paradigms . . .. . . . . . . . . . 136
10.5 Conclusions .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
References . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143

Part I
Analytic Models for Wind Energy
Conversion Systems

Chapter 1
Introduction
1.1 Background
Wind Energy: Basis for Investment
RESOLVING the world’s growing demand for energy, minimizing related impacts on the envi-
ronment and reducing the potential geopolitical tensions associated with increased competition
for energy supplies represent some of the greatest technical and policy challenges of the next several
decades. These global energy and environmental challenges require a multidisciplinary systems ap-
proach that integrates policy design and technology development.
Fossil fuels supply more than 80 percent of the world’s primary energy [1] but they are finite
resources and major contributors to global climate change. The ways and means for their ultimate
replacement with clean, affordable and sustainable energy sources at the scale required to power the
world are not yet fully obvious, readily available or, in many instances, technically feasible. Also,
these alternative sources are not all benign and their impacts on the environment, particularly when
deployed at scale, are not fully understood. Turning off the carbon spigot is the first step, and many
of the solutions are familiar: windmills, solar panels, nuclear plants. All three technologies are part
of the energy mix, although each has its issues, including noise from windmills and radioactive waste
from nukes. Moreover, existing energy infrastructures around the world are complex and very large,
represent enormous capital investment and have operational life spans of 50 years or more. Wholesale
or even piecemeal replacement of these infrastructures will be costly, will take time and will be fre-
quently resisted by entrenched interests. In addition, the local, regional and global impacts of climate
change require unique understanding of the scientific and technical underpinnings of the problems in
order to formulate informed and timely responses at unprecedented national and international levels.

CHAPTER 1. INTRODUCTION 3
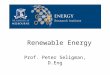
(a) Early windmill design, Denmark (b) Modern WECS integrate well in urban environments
Figure 1.1: Evolution of WECS through the decades: structure influenced by purpose.
Meeting dramatic increases in energy demand, particularly in the developing world, will com-
pound these problems at the same time that it enables opportunities for enhanced national stability,
economic development and improved quality of life. To meet the energy, environmental, and security
imperatives of the 21st century, it is essential that energy policy, technology development, regulatory
and diplomatic decisions and actions be coordinated and based on the strongest, most informed and
integrated scientific, economic and social analyses to:
avoid or minimize the stranding of assets,
optimize the investment in research,
minimize potential economic dislocation during the transition to a sustainable energy future,
preserve fundamental drivers of free markets by internalizing environmental stewardship, and
maximize the opportunities for successful transformation of global energy systems.
Wind Energy: Decades of Technological Development
In windmills (a much older technology), wind energy is used to turn mechanical machinery to do
physical work; historically, windmills were used traditionally for grinding grain or spices, pumping
water, sawing wood or hammering seeds (Fig. 1.1(a)). The evolution of modern turbines is a remark-
able success story of engineering and scientific skill, coupled with a strong entrepreneurial spirit. The
progress of wind energy around the world in recent years has been consistently impressive, with the
main engineering challenge to the wind industry being to design an efficient wind turbine to harness
that energy and turn it into electricity. Fig. 1.1(b) shows a modern wind turbine — structural design
has been influenced by need to be a good neighbor!

CHAPTER 1. INTRODUCTION 4
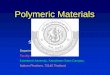
1980 1985 1990 1995 2000 2005
Nominal power (kW)
Rotor diameter (m)
Hub height (m)
Annual energy yield (kWh) 35,000 95,000 400,000 1,250,000 3,500,000 17,000,000
30 80 250 600 1,500 5,000
15 20 12446 7430
30 40 50 78 100 120
Figure 1.2: Upscaling: size increased 100×, and energy yield grew 500-fold in just 25 years.
In the last 25 years turbines have increased in power by a factor of 100, the cost of energy has
reduced (from$0.80/kWh in 1980 to$0.03 − 0.06/kWh in 2005 (in 2005 dollars) [2]), and the in-
dustry has moved from an idealistic fringe activity to the edge of conventional power generation.
The cumulative global wind power production capacity has expanded rapidly, with global installed
capacity standing at over 74 GW of electricity generating wind turbines that are operating in over 50
countries by the end of 2006, almost 4.5 times greater than in 2000 [3]. Further, future prospects are
very promising: it is envisaged the total wind power installed world-wide could rise to 160 GW by
2012 [4], due to a broadening of the global wind energy market to engage a spread of new countries
across all continents. Fig. 1.2 illustrates the growth in size of commercial wind turbines since 1980.
There are, however, several impediments to truly large-scale deployment, including intermittency
[5]-[7], the location of high-quality wind resources far from large demand centers, and public oppo-
sition to siting of WECS facilities [8]-[10]. The major concerns can be summed up as follows:
• It is commonly held that the introduction of intermittent sources of electricity such as wind
energy into a utility network causes operational problems and necessitates the provision of
energy storage.
• Reliability and durability of the structural assembly, based on O&M costs.
• Wind power sceptics have raised questions on the conceivable environmental aspects, consid-
ering both physical and biological receptors as well as socio-economic impacts.
• First-hour critics argued that with continued upscaling, the huge dimensions would limit the
number of suitable potential locations.

CHAPTER 1. INTRODUCTION 5
Regarding integration of the output into the grid, in practice, most utility networks are able to
maintain grid stability with penetrations of wind energy above 10% without any change to their op-
erating procedures. In typical grid systems there may be an adverse economic impact for penetration
levels above 20%, but there is no overriding technical difficulty that would limit wind energy pene-
tration to very low values. Advances in energy-storage technologies can address intermittency issues.
The modernization of the power network and increased efficiency of the grid will enable the integra-
tion and transmission of wind energy over longer distances. The point that is overlooked is the fact
that there are numerous uncertainties in the electricity supply and demand balance; the variability as-
sociated with wind energy only causes problems once wind energy raises the statistical error margin.
Local reinforcement of grids and the ability of variable speed turbines to contribute to grid stability
counteract concerns about variability of supply, mismatch with demand, and the need for storage.
Concerning reliability, most manufacturers peg the lifetime of a wind turbine at 20-25 years [11],
and technological advances in the control system coupled with pertinent materials for blade strength
have ensured long maintenance-free operation times, and reduced overheads. The last two arguments
focus not so much on technological challenges but on aesthetics (visual impact), landscape integra-
tion and transport logistics. Public opposition to facility siting can be addressed, in part, through
development of novel wind power technologies. Mechanical noise has practically been eliminated
and aerodynamic noise has been vastly reduced (a WECS installation at 350m emits a noise level of
35–40 dB, which is comparable to a quiet indoor room. Wind itself is noisy!). Careful siting can avoid
potential interference with electromagnetic radiation for communication. Besides, there is evidence
from independent studies suggesting wind farms do not have a significant adverse effect on AM radio,
navigation systems, mobile phone transmission, and military radar operation, with the exception of
low level air-defence radar. On the brighter side, there has been considerable potential created for
employment in all aspects of the wind industry (manufacture, project design, installation, and O&M),
though there are different ways of estimating the personnel employed in the wind energy sector.
Overall, the trend towards lower costs for wind-generated electricity has driven manufacturers
to less conservative, more optimized machine design at an increasingly large scale1. Now industry
insiders are talking about next-generation offshore turbine giants of 7.5 to 12 MW with rotor diameters
of up to 200 metres. But how realistic are these plans? Is bigger better, and are there limits to wind
turbine upscaling? Regarding these, the jury is still out.
1The pace of upscaling can only be described as breathtaking. The world’s first commercial 4.5 MW prototype wascreated in 2002 and two 5 MW prototypes developed in 2004, with one installed in the North Sea 15 miles off the Eastcoast of Scotland near the Beatrice Oil Field (assembly/commissioning in 2006). Currently, the world’s most powerfulwind turbine — the E112 manufactured by Enercon GmbH of German — delivers up to 6 MW, has an overall height of186 m and a diameter of 114 m. Interestingly, this is not the world’s largest wind turbine, it just produces the most power!

CHAPTER 1. INTRODUCTION 6
1.2 WECSs Generation Technologies
1.2.1 WECS Siting
WECSs have traditionally been installed on land, but recent trends favor offshore siting because wind
speeds are higher (may be 25% higher than at the coast) and less turbulent than onshore winds [12],
and there is reduced social imapact.
1.2.2 WECS Configurations
I. HAWT/VAWT
Turbine development over the years has experimented with both horizontal-axis wind turbine
(HAWT) and verical-axis wind turbine (VAWT) types. Due to their expected advantages of
omni-directionality and having gears and generating equipment at the tower base, vertical axis
designs were considered. However, several disadvantages have caused the vertical axis design
route to disappear from the mainstream commercial market, including:
• reduced aerodynamic efficiency — much of the blade surface is close to the axis
• albeit usually at ground level, it is not feasible to have the gearbox of large VAWT at ground
level because of the weight and cost of the transmission shaft
• invariably have a lot of structure per unit of capacity (catenary curve loaded only in tension).
II. Variable-speed, Pitch-regulated
Variable speed is facilitated by pitch regulation that involves turning the blades about their
lengthwise axes (pitching the blades) to regulate the power extracted by the rotor.
• Advantages:
(i) ability to supply power at a constant voltage and frequency while the rotor speed varies
(ii) control of the active and reactive power, thus enhancing grid integration [13]
(iii) variable-speed capability allows the turbine to operate at ideal tip-speed ratios over a
larger range of wind speeds; peculiarly, the most dramatic increase in performance is
realized at lower wind speeds.
• Disadvantages:
(i) require some active protection system to keep the turbine connected to the network but
also protected against any over-current in the case of short-term grid disturbances [14]
(ii) the alternating current (ac) they produce has a variable frequency that cannot be safely
delivered to existing power transmission grids without conditioning [15],[16].

CHAPTER 1. INTRODUCTION 7
III. Fixed-speed, Stall-regulated
As wind speed increases, the blades become increasingly stalled to limit power to accept-
able levels without any additional active control. The rotor speed is held essentially constant,
achieved through the connection of the electric generator to the stiff grid frequency.
• Advantage: simple and robust construction, hence lower capital cost.
• Disdvantages:
(i) do not have the capability of independent control of active and reactive power
(ii) offer no inherent means of torque oscillation damping which places a greater load and
cost on their gearbox.
Industry has been shifting toward variable speed for reasons related to overall wind turbine perfor-
mance: they take full advantage of variations in the incident wind speed, encounter lower mechanical
stress and less power fluctuations, and provide 10–15% higher energy output compared with constant
speed operation [17],[18]. They are routinely connected “indirectly” to the grid to allow for power
conditioning to occur (at the wind farm). The majority of modern turbines include transmissions,
clutches, and rotor shaft braking systems or aerodynamic stall features that act on the rotor blades to
maintain the variations in a rotor shaft’s rotation within prescribed design limits. Such turbines are
also equipped with SCADA2 systems [19],[20] that can adjust operating conditions (e.g., aerodynamic
stall and blade pitch) to changing wind conditions.
1.2.3 WECS Control
Recent research concentrates on improving the technological advantage of wind plants over exist-
ing conventional power generating systems. Such research has seen various proposals for the wind
industry to embrace novel digital control systems geared toward low installation and maintenance
costs while ensuring maximum energy extraction efficiency. The most common strategies incorpo-
rate the linear proportional-integral-derivative (PID) controller [21]-[23] that has been tested in the
field environment. Recently, multivariable control paradigms have been gaining prominence as they
are multiobjective hence several control goals can be met simultaneously. Such robust schemes in-
clude sensorless techniques [24]-[26], adaptive control that incorporates gain-scheduling by the linear
quadratic Gaussian (LQG) controller [27]-[31], the self-tuning regulator (STR) [32]-[34], and fuzzy
control systems [35]-[37] that may be considered an extension of maximum power-point tracking
(MPPT) schemes and yield more flexible but quite context-dependent controllers.
2Supervisory Control And Data Acquisition— a system that collects data from various sensors at a plant or in otherremote locations and then transmits this data to a central computer that manages and controls the data.

CHAPTER 1. INTRODUCTION 8
1.3 Motivation
Enviromental and technological considerations form the conceptual framework for the essence and
the design of modern WECS that incorporate sophisticated control paradigms, a theme for this thesis.
Motivation for this work stems from, firstly, the need for stabilization of greenhouse-gas (GHG)
emissions, which requires that annual emissions be brought down to the level that balances the Earth’s
natural capacity to remove such gases from the atmosphere. Though prediction of the extent of climate
change with complete certainty has not been established, the risks can be envisaged. Mitigation —
taking strong action to reduce emissions — must be viewed as an investment, a cost incurred now
and in the coming few decades to avoid the risks of very severe consequences in the future. The
stocks of hydrocarbons that are profitable to extract (under current policies) are more than enough
to take the world to levels of GHGs concentrations well beyond 750ppm CO2e, with very dangerous
consequences3. GHGs emissions contributed by the power sector can be cut by switching to lower-
carbon technologies for electricity, to be at least 60%, and perhaps as much as 75%, decarbonized by
2050 to stabilize at or below 550ppm CO2e. While a portfolio of technologies to achieve this already
exist, the priority is low-cost abatement so that they are competitive with fossil-fuel alternatives under
a carbon-pricing policy regime. Most countries have formulated policies to support the wind industry,
which is a powerful motivation that has seen wind turbine innovation across the globe.
Secondly, computer processing power and available memory have increased at a phenomenal rate
over the 20 years that the modern wind turbine industry has existed. Coupled with the possibilities
for extremely user-friendly software environments, sophisticated design calculations can be executed
in a straightforward and convenient manner by the wind turbine designer, using standard desktop PC
hardware. Simulation — the time domain approach to calculating the response of a system subject to
some disturbance — forms the basis of all current, state-of-the-art wind turbine design calculations.
Computer simulation is a most powerful tool to investigate the means and capabilities of different
technologies for integrating WECSs to the power network. When incorporation of large amount of
wind power into electric power systems takes place, a number of technical problems will be encoun-
tered that need innovative solutions. The approach relies on computer modeling and simulations to
develop effective control schemes to ensure reliability of the WECS and smooth integration of wind
power into the grid. In this report, calculations are run on Intel Celeron™ CPU, 128 MB RAM,
Unix compiler (C–programming) and Windows 2000 OS (MATLAB/Simulink™ environment) to
develop computational tools for modeling.
3CO2e designates CO2-equivalent

CHAPTER 1. INTRODUCTION 9
1.4 Problem Identification
There are two intrinsic issues common to wind power systems that are explored in this thesis, relating
to the operating environment, and robustness of the installed control scheme,viz:
I Stochastic Operating Environment
Control design in this rersearch focuses mainly on what will happen when grid-connected wind
power plants experience large amounts of highly-fluctuating wind. The issues relate to ensuring
steady electrical power output, alleviation of cyclic (torsional) loads on the power train compo-
nents, and maintaining transient voltage stability, specifically, to avoid voltage collapse in the
power system.
II Limitation of Linear Control Systems
For a long period in the wind industry, controller design has centered mainly on simple, lin-
ear, proportional-integral-derivative (PID) controllers that are easily implemented in the field
environment. Conventional PID controllers must be conservatively tuned in order to ensure
closed–loop stability over the full range of operating conditions. Gain selection for these con-
trollers has generally been a trial-and-error process relying on experience and intuition from the
engineers. Unfortunately, this means that the plant can not operate at high efficiency, since the
wind turbine is a highly nonlinear process [38], [39].
1.5 Methodology
The aforementioned objectives and control problem stem from wind stochasticity that impacts on
both power quality and drive-train fatigue life for a WECS, and the nonlinearity in the system respec-
tively. The WECS under consideration is an onshore, HAWT, variable speed, pitch-regulated type. Its
electrical part is comprised by the double output induction generator (DOIG) — a configuration that
employs a wound-rotor induction machine and a rotor converter cascade consisting of a back-to-back
double-bridge inverter configuration based on IGBTs. The approach, as detailed below, entails two
fundamentals: modeling of the various WECS dynamic components, and design of advanced control
paradigms to enhance optimal operation geared toward low cost of energy (COE).
The generality of the developed models strongly depends on the modeling requirements, i.e. time
scale (transient and 120-second simulations), and nature of the phenomena to be reproduced (power
quality and power train loading), as follows:

CHAPTER 1. INTRODUCTION 10
I Modeling Aspects
No general model can be introduced that would represent with sufficient accuracy the dynamic
behavior of all variable speed WECS schemes. In this report dynamic models are presented
for a variable speed WECS configuration that uses an induction generator and stator or rotor
AC/DC/AC converter cascade, for representing the behavior of the output power in both rel-
atively slow wind variations, and also for calculating its stability margin during above rated
turbulent inflow. In the sequel the modeling equations for each subsystem that constitute the
WECS are presented and the main assumptions outlined. The following main subsystems are
modelled independently:
• Rotor aerodynamics, (includes a wind speed model)
• Power-train, i.e. the torsional subsystem of the axes, gearbox and elastic couplings
linking the turbine rotor to the electrical generator
• Electrical and control subsystem, consisting of the electrical generator, the power
electronics converters, and the associated controls, and
• Blade-pitch regulation system and speed controller.
II Advanced Control Design
Although industry has embraced the PID controller, researchers have begun to investigate the
capabilities of more sophisticated control designs [40]-[43]. The fundamental concept common
to these designs is that they are both adaptive and depend on state feedback (often with state
estimation to render full-state feedback). This study proposes several control schemes and
evaluates their design and performance, notably:
• Linear Quadratic Gaussian (LQG) — this converts control system design problems to an
optimization problem with quadratic time-domain performance criteria; disturbances and
measurement noise are modelled as stochastic processes.
A hybrid scheme is also mooted, based on augmenting the LQG with a neurocontroller
(NC), whereby the control load is shared such that the LQG handles the linear part while
the NC utilizes the intrinsic properties of NNs to handle the nonlinearities inherent in the
WECS system, to execute generator torque control.
• Self-Tuning Regulator (STR) — control is exercised through a self-tuning regulator, and
incorporates a recursive least squares (RLS) algorithm to estimate plant parameters.
• Model-Based Predictive Control (MBPC) — control algorithm based on solving an online
optimal control problem via a receding horizon policy.

CHAPTER 1. INTRODUCTION 11
1.6 Goals and Scope of Present Work
1.6.1 Aim of the Work
The objective of this work is to develop advanced control techniques for variable-speed, pitch-regulated
WECS by a modeling approach and validate their performance. This study is focused mainly on:
• An investigation of the capabilities of advanced control paradigms for wind-electrical energy
conversion performance.
• Reduction of power train fatigue loads by enhanced damping through generator torque control.
• An investigation on the impact of detailed DOIG wind turbine modeling on the accuracy of
electrical system performance analysis.
• The transient and steady-state analysis of a wind-power DOIG operating under high turbulence
wind inflow using the developed power-train and field-circuit simulator models.
1.6.2 Scientific and Technological Contribution of this Work
1. Applying the developed methodology of combining detailed wind turbine subsystems’ model-
ing with a Matlab-Simulink environment for the analysis of the whole electric drive system and
electric part of a wind energy conversion system, and validation of the developed simulator.
2. Comparative study of different variable speed wind turbine control approaches from the point
of view of transient simulation accuracy, gauged upon the classical PID.
3. Verification of the method for coupling the magnetic field and circuit equations of the electrical
machine with the drive-train dynamic equations.
Adverse climatic change and hence the need for ‘green’ energy in contemporary times aside, global
energy demand is consistently exponential, and wind energy is becoming a significant player in the
energy mix. This research focuses on the need to design control systems that properly account for
the flexible modes of the turbine, and maintain the stable closed-loop behavior of the WECS. Overall,
this research contributes to advancement in wind technology geared toward lower cost of energy
(COE), by proposing advanced control paradigms whose stock-in-trade is robustness. In addition,
they are easily implemented in a microprocessor matrix. Most of the research has been published in
peer-reviewed journals, establishing permanent reference value.

CHAPTER 1. INTRODUCTION 12
Aerodynamics model
Drive trainmodel
Windspeedmodel
Control concept (Gen. torque & pitch angle)
DOIGmodel
Grid &Converter
Chapter 4 Chapter 2 Chapter 3 Chapter 5 Chapter 6
STRcontrol
Chapter 8 Chapter 9
MBPCcontrol
Chapter 10
WECSBackground: Chapter 1
Electrical system Mechanical system Control system Chapter 11
Analysis &conclusions
LQGcontrol
Chapter 7
(H /H &Fuzzy control)
2 inf
Future work
Figure 1.3: Outline of presentation of the work in this thesis.
1.6.3 Outline of Presentation
This project is a multi-task work; it contains elements of electric machinery theory, shaft system rep-
resentation, aerodynamic relations, control features and controller design, and the overall interaction
of the wind energy conversion system (wind turbine and power system), as depicted in Fig. 1.3. The
content of the work is separated into two parts:
• Part I deals with development of WECS subsystems’ dynamic models. State-space representa-
tion of the mechanical and electrical subsystems are harmonized as a foundation for the control
design in the sequel. The models are discretized to enable sampling during the simulations, and
the various time constants associated with the subsystems are defined.
• Part II analyzes design, for optimality and stability in operation, of several advanced controllers
applied to the perfomability models developed inPart I.
Furthermore, the thesis is divided into eleven chapters, including the Introduction (Chapter 1) that
has given a background check on the development of wind power through the decades, status of wind
power today, the challenges, future trends, and the various WECS configurations. Motivation for this
thesis has been presented, as well as the statement of the problem, the objectives, and the methodology
employed in addressing the problems. The rest of the work is detailed in the following fashion.
Chapter 2validates the economic viability of WECSs by a theoretical development of a model for
the energy conversion as well as the concept of turbine linearization that is essential for the control
formulation in the steady-state analysis. The research work presented in this chapter appears inIET
Proc. Renewable Power Generation. (Accepted for publication, 2007).

CHAPTER 1. INTRODUCTION 13
Chapter 3deals with the mechanical dynamics of the WECS with regard to torsional loading. A
spring-mass-damper model for the mechanical construction of the drive-train as a series of elastically
coupled frictionless shafts is developed, and analysis of the system reliability is tackled. This concept
is developed in most of the published works by the author as detailed in Appendix C.
Chapter 4describes the DOIG as the interface between the wind turbine and grid, with the con-
verter control mentioned with a generic scheme. The work is based on DOIG modeling as presented
in the author’s work:IEEE Transactions on Energy Conversion, (Forthcoming).
Chapter 5presents in detail the model for generating a real-time wind speed profile for the simula-
tions, with particular emphasis on modeling of gust events for the turbulent inflow. This work is pub-
lished inRenewable Energy, vol. 32, no. 14, pp. 2407-2423, andWind Energy, doi:10.1002/we.236.
Chapter 6elucidates on the control philosophy, and describes the global model detailing inter-
action of the WECS subsystems. Description of controller formulation is presented. The chapter
examines maximum power-point tracking (MPPT) schemes as well as their demerits, and suggests
the necessary shift in controller design: use of multivariable schemes for generator torque control.
These are handled in subsequent chapters. This research is published inRenewable Energy, vol. 31,
no. 11, pp. 1764-1775, andInt. J. of Emerging Electric Power Systems, vol. 8, no. 2, Art. 3, pp. 1-19.
Chapter 7presents the first of several advanced control paradigms — the LQG in combination
with a nuerocontroller (NC). Investigations are carried out on the suitability of the proposed con-
trollers in meeting the two objectives at above rated wind speeds: output power leveling and drive-
train load mitigation. This research is published inRenewable Energy, vol. 32, no. 14, pp. 2407-2423,
andRenewable Energy, doi:10.1016/j.renene.2007.12.001.
Chapter 8proposes the self-tuning regulator (STR). This research work is published inIET Procs.
Control Theory & Applications, vol. 1, no. 5, pp. 1431-1440.
Chapter 9develops the model-based predictive control (MBPC) as an alternative control scheme
that relies on prediction to minimize errors in control design and performance. This work appears in
the paper submitted toIET Procs. Renewable Power Generation.
Chapter 10renders the analyses and perspectives — a crispy discussion on the implications of
advanced control paradigms to the wind industry from the dual techno-economic viewpoint, as well
as a conclusion of the thesis.
Chapter 11gives directions for future research, based on an on-going study of several schemes:
H2/H∞ and neurofuzzy logic, as a foundation for viable alternatives, albeit only qualitatively.
The Appendix serves to provide important features regarding the modeling, in respect of WECS
parameters and mathematical derivations for supporting various concepts developed therein.

CHAPTER 1. INTRODUCTION 14
References
[1] The European Wind Energy Association (EWEA), “The current status of the wind industry —
Industry overview, market data, employment, policy,”Available online, http://www.ewea.org
[2] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “RLS-based self-tuning regu-
lator for WTG dynamic performance enhancement under stochastic setting,”Proc. The Interna-
tional Conference on Electrical Engineering, ICEE 2007, Hong Kong, 8-12 July 2007.
[3] American Wind Energy Association (AWEA), “The economics of wind energy,”Available on-
line, http://www.awea.org/pubs/factsheets/EconomicsOfWind-Feb2005.pdf
[4] International Energy Agency (IEA), “Key world energy statistics 2007,”Available online,
http://www.iea.org/statistics
[5] K. Stunz, and J. Nedrud, “Multilevel energy storage for intermittent wind power conversion:
computer system analogies,”IEEE Power Engineering Society General Meeting, 12–16 June
2005, vol. 2, pp. 1950-1951.
[6] R. Piwko, D. Osborn, R. Gramlich, G. Jordan, D. Hawkins, and K. Porter, “Wind energy delivery
issues (transmission planning and competitive electricity market operation),”IEEE Power and
Energy Magazine, vol. 3, no. 6, pp. 47-56, Nov.-Dec. 2005.
[7] J. P. Barton, and D. G. Infield, “Energy storage and its use with intermittent renewable energy,”
IEEE Trans. Energy Conversion, vol. 19, no. 2, pp. 441-448, June 2004.
[8] T. Bookman, “Wind energy’s promise, offshore,”IEEE Technology and Society Magazine, vol.
24, no. 2, pp. 9-15, Summer 2005. doi:10.1109/MTAS.2005.1442376.
[9] V. Colello, “Wind energy projects in New York: facing the siting issue,”Environmental Quality
Management, vol. 15, no. 1, pp. 105-110, Sept. 2005. doi:10.1002/tqem.20073.
[10] J. Everaert, and E. W. M. Stienen, “Impact of wind turbines on birds in Zeebrugge (Belgium):
significant effect on breeding tern colony due to collisions,”Biodiversity and Conservation, vol.
16, no. 12, Nov. 2007. doi:10.1007/s10531-006-9082-1.
[11] British Wind Energy Association (BWEA), “Onshore wind turbines,”Available online,
http//:www.bwea.com
[12] A. R. Henderson, C. Morgan, B. Smith, H. C. Sørensen, R. J. Barthelmie, and B. Boesmans,
“Offshore wind energy in europe – a review of thestate-of-the-art,”Wind Energy, vol. 6, no. 1,
pp. 36-52, Feb. 2003. doi:10.1002/we.82.

CHAPTER 1. INTRODUCTION 15
[13] B. Rabelo, and W. Hoffmann, “Optimal active and reactive power control with the doubly-fed
induction generator in the MW-class wind turbines,”Procs. 4th IEEE International Conference
on Power Electronics and Drive Systems, 22-25 Oct. 2001, vol. 1, pp. 53-58.
[14] L. Holdsworth, X. G. Wu, J. B. Ekanayake, and N. Jenkins, “Comparison of fixed speed and
doubly-fed induction wind turbines during power system disturbances,”IEE Procs. Genera-
tion, Transmission and Distribution, vol. 150, no. 3, pp. 343-352, May 2003. doi:10.1049/ip-
gtd:20030251.
[15] R. C. Portillo, M. M. Prats, J. I. Leon, J. A. Sanchez, J. M. Carrasco, E. Galvan, and L. G.
Franquelo, “Modeling strategy for back-to-back three-level converters applied to high-power
wind turbines,”IEEE Trans. Industrial Electronics, vol. 53, no. 5, pp. 1483-1491, Oct. 2006.
doi:10.1109/TIE.2006.882025.
[16] A. H. Ghorashi, S. S. Murthy, B. P. Singh, and B. Singh, “Analysis of wind driven grid connected
induction generators under unbalanced grid conditions,”IEEE Trans. Energy Conversion, vol.
9, no. 2, pp. 217-223, June 1994. doi:10.1109/60.300156.
[17] Q. Wang, and L. Chang, “An intelligent maximum power extraction algorithm for inverter-based
variable speed wind turbine systems,”IEEE Trans. Power Electronics, vol. 19, no. 5, pp. 1242-
1249, Sept. 2004.
[18] K. Tan, and S. Islam, “Optimum control strategies in energy conversion of PMSG wind turbine
system without mechanical sensors,”IEEE Trans. Energy Conversion, vol. 19, no. 2, pp. 392-
399, June 2004.
[19] G. J. Smith, “SCADA in wind farms,”IEE Colloquium on Instrumentation in the Electrical
Supply Industry, 29 June 1993, pp. 11/1-11/2.
[20] O. Anaya-Lara, N. Jenkins, and J. R. McDonald, “Communications requirements and technol-
ogy for wind farm operation and maintenance,”First International Conference on Industrial and
Information Systems, 8-11 Aug. 2006, pp. 173-178. doi:10.1109/ICIIS.2006.365659.
[21] A. Tapia, G. Tapia, J. X. Ostolaza, and J. R. Saenz, “Modeling and control of a wind turbine
driven doubly fed induction generator,”IEEE Trans. Energy Conversion, vol. 18, no. 2, pp.
194-204, 2003.
[22] B. Boukhezzar, L. Lupu, H. Siguerdidjane, and M. Hand, “Multivariable control strategy for
variable speed, variable pitch wind turbines,”Renewable Energy, vol. 32, pp. 1273-1287, 2007.

CHAPTER 1. INTRODUCTION 16
[23] M. Sedighzadeh, D. Arzaghi-Harris, and M. Kalantar, “Adaptive PID control of wind energy
conversion systems using RASP1 mother wavelet basis function,”IEEE Region 10 Conference
TENCON 2004, 21-24 Nov. 2004, vol. 3, pp. 524-527. doi:10.1109/TENCON.2004.1414823.
[24] T. Senjyu, E. B. Muhando, A. Yona, N. Urasaki, H. Kinjo, and T. Funabashi, “Maximum wind
power capture by sensorless rotor position and wind velocity estimation from flux linkage and
sliding observer,”Int. Journal of Emerging Electric Power Systems, vol. 8, no. 2 Art. 3, pp. 1-19,
2007.
[25] T. Senjyu, S. Tamaki, E. B. Muhando, N. Urasaki, H. Kinjo, T. Funabashi, H. Fujita, and H.
Sekine, “Wind velocity and rotor position sensorless maximum power point tracking control for
wind generation system,”Renewable Energy, vol. 31, no. 11, pp. 1764-1775, 2006.
[26] R. Cardenas, R. Pena, G. Asher, and J. Cilia, “Sensorless control of induction machines for
wind energy applications,”IEEE 33rd Annual Power Electronics Specialists Conference PESC
02.2002, vol. 1, pp. 265-270. doi:10.1109/PESC.2002.1023880.
[27] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, H. Kinjo, and T. Funabashi, “Gain scheduling
control of variable speed WTG under widely varying turbulence loading,”Renewable Energy,
vol. 32, no. 14, pp. 2407-2423, 2007.
[28] P. Novak, T. Ekelund, I. Jovilk, and B. Schimidtbauer, “Modeling and control of variable speed
wind turbine drive systems dynamics,”IEEE Control Systems Magazine, vol. 15, no. 4, pp.
28-38, 1995.
[29] E. S. Abdin, and W. Xu, “Control design and dynamic performance analysis of a wind turbine-
induction generator unit,”IEEE Trans. Energy Conversion, vol. 15, no. 1, pp. 91-96, 2000.
[30] W. E. Leithead, S. de La Salle, and D. Reardon, “Role and objectives of control of wind tur-
bines,”IEEE Proceedings, vol. 138 Pt. C, pp. 135-148, 1991.
[31] I. Munteanu, N. A. Cutululis, A. I. Bratcu, and E. Ceanga, “Optimization of variable speed wind
power systems based on a LQG approach,”Control Engineering Practice, vol. 13, pp. 903-912,
2005.
[32] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Disturbance rejection by
dual pitch control and self-tuning regulator for WTG parametric uncertainty compensation,”
IET Proc. Control Theory and Applications, vol. 1, no. 5, pp. 1431-1440, Sept. 2007.
[33] W. Ren, and P. R. Kumar, “Stochastic adaptive prediction and model reference control,”IEEE
Trans. Automatic Control, AC-30, pp. 2047-2060, 1994.

CHAPTER 1. INTRODUCTION 17
[34] T. Senjyu, R. Sakamoto, N. Urasaki, H. Higa, K. Uezato, and T. Funabashi, “Output power
control of wind turbine generator by pitch angle control using minimum variance control,”IEEJ
Trans. Power and Energy, vol. 124B, no. 12, pp. 1455-1463, 2004.
[35] A. M. Mohamed, M. N. Eskander, and F. A. Ghali, “Fuzzy logic control based maximum power
tracking of a wind energy system,”Renewable Energy, vol. 23, pp. 235-245, 2001.
[36] M. G. Simoes, B. K. Bose, and R. J. Spiegel, “Fuzzy logic based intelligent control of a variable
speed cage machine wind generation system,”IEEE Trans. Power Electronics, vol. 12, no. 1,
pp. 87-95, 1997.
[37] R. G. de Almeida, J. A. P. Lopes, and J. A. L. Barreiros, “Improving power system dynamic
behavior through doubly fed induction machines controlled by static converter using fuzzy con-
trol,” IEEE Trans. Power Systems, vol. 19, no. 4, pp. 1942-1950, Nov. 2004.
[38] E. B. Muhando, T. Senjyu, N. Urasaki, H. Kinjo, and T. Funabashi, “Online WTG dynamic per-
formance and transient stability enhancement by evolutionary LQG,”IEEE Power Engineering
Society General Meeting, 24-28 June 2007, pp. 1-8. doi:10.1109/PES.2007.385499.
[39] C. W. Kung, R. K. Joseph, and N. K. Thupili, “Evaluation of classical and fuzzy logic controllers
for wind turbine yaw control,”Procs. The First IEEE Regional Conference on Aerospace Control
Systems, 25-27 May 1993, pp. 254-258.
[40] E. B. Muhando, T. Senjyu, O. Z. Siagi, and T. Funabashi, “Intelligent optimal control of wind
power generating system by a complemented linear quadratic Gaussian approach,”Procs. IEEE
Power Engineering Society Conference and Exhibition, PowerAfrica 2007, 16-20 July 2007.
[41] T. Ekelund, “Speed control of wind turbines in the stall region,”Procs. 3rd IEEE
Conference on Control Applications, 24-26 Aug. 1994, vol. 1, pp. 227-232, 2007.
doi:10.1109/CCA.1994.381194.
[42] I. Kraan, and P. M. M. Bongers, “Control of a wind turbine using several linear robust con-
trollers,” Procs. 32nd IEEE Conference on Decision and Control, 15-17 Dec. 1993, vol. 2, pp.
1928-1929. doi:10.1109/CDC.1993.325530.
[43] K. Stol and M. Balas, “Full-state feedback control of a variable-speed wind turbine: a compar-
ison of periodic and constant gains,”ASME Journal of Solar Energy Engineering, vol. 123, no.
4, pp. 319-326, Nov. 2001.

Chapter 2
Aerodynamic Conversion Modeling
2.1 Introduction
ALL the successful megawatt-class wind technology developments to date are results of rather
conventional evolutionary design efforts whose basis is the premise that control can signifi-
cantly improve energy capture and reduce dynamic loads in a WECS [1],[2]. As wind turbines grow
in size, their components will be subjected to additional wind loading associated with complex en-
vironments of their installation. Indeed, rotor structural dynamics significantly influence the wind
turbine response during electrical faults. To provide industry with the support it needs to develop
technologies capable of cost-effective operation in stochastic wind speed resource areas, it is impor-
tant for researchers to understand drive train design for effective power conversion through advanced
power electronic components. Because blades and rotor comprise up to 25% of the WECS’s total
capital cost, and the rotor captures 100% of the energy, technology improvements in these areas can
provide as much as 50% of the cost reduction. Typically, when power rating goes up, rotor diameter
increases too. Maintaining an optimum ratio between rated power and rotor swept area is essential,
but the optimal value depends to a large extent on average wind speed at hub height. One implication
of increasing rotor diameters is increased aerodynamic noise, hence rotor speed, as a rule, has to come
down to curb these emissions.
Beginning with simple calculations based largely on engineering intuition, the approach to wind
turbine design has been transformed to the point where sophisticated computer-based analysis is now
performed routinely throughout the industry. This chapter develops both aerodynamic and electrical
models for power production based on empirical formulations. These assist in visualizing the con-
cept of control design as a philosophy geared toward achieving near-ideal performance within the
technological constraints that abound in the wind industry.

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 19
WINDMILL DRIVE TRAIN
AC generator
Torquecontrol
AC
ACGearbox
Grid
vw
Γref
ΓgΓt
ELECTRICAL SYSTEM
Figure 2.1: Generalized block diagram of the WECS’s main subsystems.
2.2 Theoretical Development for Aerodynamic Conversion
Fig. 2.1 depicts the interconnection of the main drive train components. The windmill comprises the
blades and the hub. The working principle of the WECS encompasses two conversion processes that
are executed by its principle subsystems. The wind turbine generates torque from the wind pressure,
which is transmitted via the shaft and gearing to the generator rotor. The generator converts this
torque into electric power. The control system serves to regulate the rotor speed and damp out torque
fluctuations at the shaft by pitch and torque controllers respectively, as explained inPart II.
2.2.1 Energy Extraction
With regard to energy production, the wind power,Pw, available from the turbine blades’ rotation is
a derivative of the kinetic energy,Ew, of the wind with respect to time
Pw =∂Ew
∂t=
1
2
∂(mv2w)
∂t=
1
2
∂(ρΛv3wt)
∂t=
1
2ρΛv3
w (2.1)
wherem is the mass of the air (Kg) in the area swept by the blades,vw is the wind speed at the centre
of the rotor (m/s),ρ is the air density (kg/m3), andΛ = πR2 is the frontal area of the wind turbine
(m2), R being the rotor radius (m). The portion of the extracted wind power converted to mechanical
power by the rotor can be simulated by the static relation obtained according to the Rankine-Froude
theory [3] of propellers in incompressible fluids
Pm = cP (λ, β)ρΛ
2v3
w (2.2)
wherePm is the mechanical power (W), andcP (λ, β) denotes the performance coefficient of the
turbine, determined by the pitch angle,β, of the blades and the tip-speed ratio (TSR),λ.

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 20
0 2 4 6 8 10 12 14 16 18 20 0 2 4 6 8 10 12 14 16
0 0.1 0.2 0.3 0.4 0.5 0.6
cp(λ,β)
βλ
cp(λ,β)
0
0.1
0.2
0.3
0.4
0.5
0.6
0 2 4 6 8 10 12 14
c P
λ
β=−2β=0β=3β=5β=7
β=10
(a)cP (λ, β) according to (2.3) (b) Variation ofcP with λ andβ
Figure 2.2: Performance curves for a 3-bladed WECS. NegativecP values have been set to zero.
2.2.2 Power Curve
Research in advanced control for development of efficient production tools is in line with the frame-
work that aims to improve performance of WECS to get the best benefit from the wind energy source.
With the primary objective of maintaining steady electrical power, reducing rotor speed fluctuations,
and minimizing control actuating loads, controller design requires a formulation of the power curve
of the WECS. One common way to control the active power of a wind turbine is by regulating the
cP value. Information on the power coefficient for commercial wind turbines is not readily given by
turbine manufacturers [4]. Several numerical approximations have been developed to computecP
[5]-[8]. This chapter analyzes an achetype for modelingcP , approximated using a nonlinear function
based on the turbine characteristics, according to [9]. It is modelled as
cP (λ, β) = 0.5176
(116
λi− 0.4β − 5
)e
−21λi + 0.0068λ (2.3)
where the TSR is computed from the blade tip-speed and wind speed
λ =ωtR
vw(2.4)
with ωt designating the rotor angular velocity, in rad/sec. Further, the valueλi is determined from
1
λi=
1
λ + 0.08β− 0.035
β3 + 1. (2.5)
For practical purposescP may be determined using a graphical method; the power coefficient is
illustrated as a three-dimensional mesh surface in Fig. 2.2(a). The profile in Fig. 2.2(b) shows that
cP = 0.48 for β = 0 andλ = 8.1. This tip-speed value is assigned as the optimum tip-speed

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 21
-5
0
5
10
15
20
25
30
5 10 15 20 25
Wind speed, vw [m/s]
ωtλβ
(a) Rotor speed (rpm), TSR, and pitch angle (deg.)
0
0.1
0.2
0.3
0.4
0.5
5 10 15 20 25
Pow
er c
oeffi
cien
t, c P
Wind speed, vw [m/s]
(b) Performance coefficientcP (λ, β)
0.01
0.02
0.03
0.04
0.05
0.06
0.07
5 10 15 20 25
Tor
que
coef
ficie
nt, c
T
Wind speed, vw [m/s]
(c) Torque coefficientcT (λ, β)
Figure 2.3: Steady power curve calculations: performance coefficients variation with wind speed.
ratio, λopt, and the optimum turbine speed curve at any given wind speed can be obtained based on
this value. This curve is then used as a reference in the active power control.cP can be thought of
as a correction factor, introduced into the above power equation to reflect the reality that the rotor’s
power-capturing efficiency is less than perfect.
It is noteworthy that WECSs are now highly efficient with less than 10% thermal losses in the
system transmission. The aerodynamic efficiency of turbines has gradually risen from the early 1980s
with cP rising from 0.44 to about 0.50 for state-of-the-art technology, which is near the theoretical
maximum value of 16/27≈0.593, called the Lancaster-Betz limit [3]. This value is based upon the
physical reality that even the most aerodynamically efficient turbine blade disrupts the airflow of
incident wind before the wind front reaches the rotating blade. In actuality, the air molecules within
the cross-sectional area swept by the rotor slow down as they approach rotating turbine blades and thus
lose kinetic energy proportional to the cube of that velocity loss. Note that the maximum theoreticalcP
value in Fig. 2.2(b) from the empirical formulation in (2.3) is about 0.59, corresponding toβ = −2
andλ = 14. Fig. 2.3(a) shows variation inωt, λ, andβ while Figs. 2.3(b) and (c) show, respectively,
the desired variations incP (λ, β) and torque coefficientcT (λ, β) for the WECS over a range of wind
speeds, for optimum power production.

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 22
0 0.2 0.4 0.6 0.8
1 1.2 1.4 1.6 1.8
0 5 10 15 20 25
Pow
er, [
pu]
uw(t), [m/s]
cP=1.0 (Eqn 2.1)Actual (Eqn 2.2)
Linearized (Eqn 2.6)
Figure 2.4: Ideal and actual shaft power, and linearized electrical output power.
2.2.3 Electrical Output Model
The electrical power output is a function of various parameters including wind speed, rotor speed,
efficiencies of the drive train components, type of turbine, system inertias, and the gustiness of the
wind. By defining a model for the output electrical powerPe, more accurate energy estimates can be
attained. A closed form expression [10] for energy production is obtained by assuming thatPe varies
asvkw between cut-in,vc, and rated,vr, wind speeds, wherek is the Weibull shape parameter:
Pe = 0 for (vw < vc)
Pe = a + bvkw for (vc ≤ vw ≤ vr)
Pe = Pr for (vw > vr)
(2.6)
wherePr is the rated electrical power, and the coefficientsa andb are given by
a =Prv
kc
vkc − vk
r
and b =Pr
vkr − vk
c
.
Fig. 2.4 shows the power curve for the variable speed, pitch-regulated WECS. The first curve
(cP =1.0) gives the maximum wind power available, while the second one (‘Actual’) is the mechanical
power (including all the generator and transmission losses) for production of useful electrical power.
For the linearized plot ofPe versusvw in (2.6) fork = 2, the electrical power varies asv2w between
the cut-in and rated wind speeds, rising above zero at a wind speed of 5.6 m/s and then assumes a
constant value at and above rated wind speeds. It is noteworthy that other turbines, transmissions, and
generators will produce somewhat different curves with approximately the same shape.

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 23
2.2.4 Capacity Factor
Average power output,Pavg, of a turbine is a much better economical indicator of the total energy
production as compared to the rated powerPr, as the latter is chosen by the manufacturer with less
accurate regard to wind speed at a site.Pavg may be computed as a product of the power produced
at each wind speed and the fraction of the time that wind speed is experienced, integrated over all
possible wind speeds
Pavg =
∫ ∞
0
Pef(vw)dvw (2.7)
wheref(vw) is the Weibull probability density function
f(vw) =k
c
(vw
c
)k−1
exp
[−(
vw
c
)k]
(2.8)
with c as the scale parameter. Generally,c is about 12% larger than the mean wind speed, and since
most good wind regimes will have the shape parameterk in the range1.5 ≤ k ≤ 3.0, the estimate
c = 1.12µw suffices, whereµw designates the long term mean wind speed at the site. Thus the
optimum design for energy production is a rated speed of about twice the mean speed. Substituting
(2.6) and (2.8) into Eq. (2.7) yields
Pavg =
∫ vr
vc
(a + bvkw)f(vw)dvw + Pr
∫ ∞
vr
f(vw)dvw . (2.9)
The Rayleigh distribution [11] is aχ2 density function with 2 DOF, a subset of the Weibull distribution
whenk = 2 and is sufficiently accurate for analysis of wind power systems when statistics at a given
site are unknown. Substituting the limits of integration in (2.9) and neglecting small terms
Pavg = Pr
exp[−(vc/c)
2] − exp[−(vr/c)2]
(vr/c)2 − (vc/c)2
. (2.10)
The quantity inside the brackets in (2.10) is the Capacity Factor (CF), thus
Pavg = Pr(CF). (2.11)
The CF may be envisaged as a correction factor that reflects the turbine’s technical availability. CFs
of at least 25% are considered minimally necessary for a site to be considered economically viable
[12]. In practice, the most efficient wind farms exhibit individual turbine CFs of 30 to 35% [13],[14].
However, values as high as 45% have been observed [12],[13],[15].

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 24
2.3 Turbine Linearization for Steady-state Analysis
Linear controller design requires that the nonlinear turbine dynamics be linearized about a speci-
fied operating point (OP). The linearization process, carried out by numerical simulation, determines
an optimal OP that yields maximum energy extraction. Once stability is attained, observation of
the system response to step inputs provides direction in choosing gain values that provide adequate
performance [16]. The assumption is that the plant dynamics are adequately described by a set of
ordinary differential equations in state-variable form. For small-signal approximations, stationarity is
assumedi.e. variables do not change significantly from their initial values at the operating point [4].
The wind turbine is driven by a rotor torque,Γt , extracted from the wind, and delivered through a
gearbox to the DOIG, expressed as
Γt = RρΛv2
w
2cT (λ, β) . (2.12)
This continuous function,Γt = f (ωt , vw , β), possesses nonlinearity, being a function of the third
power of wind speed. At the OP,Γt |OP = Γg |OP , and the turbine may be linearized along the optimal
trajectory by considering a small signal value,∆Γt
Γt = Γt,OP + ∆Γt (2.13)
that may be expanded as a Taylor series with respective valuesωt,OP , vw,OP andβOP at the OP:
Γt = f(ωt,OP , vw,OP , βOP ) +
[∂f
∂ω∆ωt +
∂f
∂v∆vw +
∂f
∂β∆β
]+
1
2!
[∂2f
∂ω2(∆ωt)
2 +∂2f
∂v2(∆vw)2
+∂2f
∂β2(∆β)2 + 2
∂2f
∂ω∂v∆ωt∆vw + 2
∂2f
∂v∂β∆vw∆β + 2
∂2f
∂ω∂β∆ωt∆β
]+ hots (2.14)
where partial differentials are computed around the OP.∆ indicates instantaneous change, while∆ωt,
∆vw and∆β designate deviations from the chosen OPi.e. (ωt −ωt,OP ), (vw −vw,OP ) and(β−βOP ),
respectively, and “hots” refers to “higher order terms”, which are neglected. Thus
Γt − Γt ,OP =∂f
∂ω∆ωt +
∂f
∂v∆vw +
∂f
∂β∆β . (2.15)
Adopting a local convention and denoting the respective slopes as
kω =∂f
∂ω
∣∣∣OP
, kv =∂f
∂v
∣∣∣OP
, and kβ =∂f
∂β
∣∣∣OP
(2.16)

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 25
-3500
-3000
-2500
-2000
-1500
-1000
-500
0
5 10 15 20 25
∂Γt/∂
ωt
Wind speed, vw [m/s]
(a) Partial derivative of aerodynamic torque w.r.t. rotor speed
50000
100000
150000
200000
250000
300000
350000
5 10 15 20 25
∂Γt/∂
v w
Wind speed, vw [m/s]
(b) Partial derivative of aerodynamic torque w.r.t. wind speed
-15000
-10000
-5000
0
5 10 15 20 25
∂Γt/∂
β
Wind speed, vw [m/s]
(c) Partial derivative ofaerodynamic torque w.r.t. pitch angle
Figure 2.5: Variation in linearization coefficients with wind speed.
then (2.15) becomes
∆Γt = kω∆ωt + kv∆vw + kβ∆β (2.17)
and this linearizes the turbine torque around the OP. Since the torque coefficientcT (λ, β) cP (λ, β)/λ
the aerodynamic torque in (2.12) may be determined from the modelledcP (λ, β) in (2.3) to yield the
respective aerodynamic (linearization) coefficients in (2.16), as follows [17]
kω =∂Γt
∂ωt
∣∣∣∣∣OP
=ρΛ
2ω2t
v2w,OP
(−cP
∣∣∣∣∣OP
vw,OP + ωtR∂cP
∂λ
∣∣∣∣∣OP
)(2.18)
kv =∂Γt
∂vw
∣∣∣∣∣OP
=ρΛ
2ωtvw,OP
(3cP
∣∣∣∣∣OP
vw,OP − ωtR∂cP
∂λ
∣∣∣∣∣OP
)(2.19)
kβ =∂Γt
∂β
∣∣∣∣∣OP
=ρΛ
2ωt
v3w,OP
∂cP
∂β
∣∣∣∣∣OP
. (2.20)
Figs. 2.5(a)–(c) show the respective partial derivatives of aerodynamic torque with rotor angular
frequency, wind speed, and pitch angle, representing the linearization coefficients in (2.18)–(2.20),
and are computed from thecP (λ, β) surface according to the OP loci.

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 26
2.4 Remarks
In rotor design, an operating speed range is normally selected first, having regard to issues such as
acoustic noise emission. With the speed chosen it then follows that there is an optimum total blade
area for maximum rotor efficiency. Energy capture improves with increasing turbine size, and it is
often asserted that component mass and costs increase less than cubically with scale. However, the
underlying physics is often confused with the effects of technology development and the influence of
volume on production cost.
Most modern WECSs have three blades. The two-bladed rotor design is technically a little less
efficient aerodynamically than the established three-bladed design, though both are at par in the over-
all cost benefit. In general, there are some small benefits from increasing blade number, relating to
minimizing losses that take place at the blade tips. In aggregate, these losses are less for a larger
number of narrow blade tips than for fewer, wider ones. Two-bladed rotors generally run at a much
higher tip speed than three-bladed rotors so most historic designs would consequently have noise
problems. There is, however, no fundamental reason for the higher tip speed, and this should be dis-
counted in an objective technical comparison of the design merits of two versus three blades. Thus,
the one-bladed rotor is, perhaps, more problematic technically whilst the two-bladed rotor is basi-
cally acceptable technically. The decisive factor in eliminating the one-blade rotor design from the
commercial market and in almost eliminating the two-bladed design has been visual impact.
Although the power curve is an accurate measure of the turbine’s ability to generate electricity
from incident wind, it does not adequately describe expectations of real-world power production. For
a more realistic analysis, the average power,Pavg, that is dependent on both the Rayleigh probability
density function as well as the Capacity factor, is utilized. Since the Rayleigh density function is
dependent only on the mean wind speed, all its statistics to describe a measurement site are imme-
diately available without massive amounts of additional computation. Indeed the Rayleigh is very
easy to use and will yield quality, acceptable results in most cases, as confirmed by various studies
[18]-[20]. Capacity factors are normally represented as annualized values to account for seasonal
variations in wind regimes, thus are considered as the most realistic and reliable predictors of the
energy yield for a given candidate site. Because it is rooted in the real world, the capacity factor
becomes a much more valuable tool for supporting decisions about wind farm development than the
turbine’s power curve alone. CFs are dimensionless, expressed as a ratio in which the WECS’s annual
predicted energy production is divided by the energy it would produce if it operated at its nameplate
rating continuously.

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 27
References
[1] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “RLS-based self-tuning regulator
for WTG dynamic performance enhancement under stochastic setting,”Proc. The International
Conference on Electrical Engineering, ICEE 2007, 8-12 July 2007, pp. 1-8.
[2] A. D. Wright, and M. J. Balas, “Design of state-space-based control algorithms for wind turbine
speed regulation,”ASME Journal of Solar Energy Engineering, vol. 125, no. 4, pp. 386-395, June
2003.
[3] T. Burton, D. Sharpe, N. Jenkins, and E. Bossanyi,Wind Energy Handbook, New York: Wiley,
2001. ISBN:978-0471489979.
[4] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Disturbance rejection by dual
pitch control and self-tuning regulator for wind turbine generator parametric uncertainty compen-
sation,” IET Procs. Control Theory and Applications, vol. 1, no. 5, pp. 1431-1440, Sept. 2007.
doi:10.1049/iet-cta:20060448.
[5] H. Akagi, Y. Kanazawa, and A. Nabae, “Instantaneous reactive power compensators comprising
switching devices without energy storage components,”IEEE Trans. Industrial Applications, vol.
IA-20, no. 3, pp. 625-630, May/June 1984.
[6] N. W. Miller, W. W. Price, and J. J. Sanchez-Gasca, “Dynamic modeling of GE 1.5 and 3.6
wind turbine-generators,”GE Power Systems Energy Consulting, GE WTG Modeling-v3.0.doc,
October 27, 2003.
[7] O. Wasynczuk, D. T. Man, and J. P. Sullivan, “Dynamic behavior of a class of wind turbine
generators during random wind fluctuations,”IEEE Trans. Power App. Syst., vol. 100, pp. 2837-
2845, 1981.
[8] P. M. Anderson, and A. Bose, “Stability simulation of wind turbine systems,”IEEE Trans. Power
App. Syst., vol. 102, pp. 3791-3795, 1983.
[9] S. Heir, Grid Integration of Wind Energy Conversion Systems, John Wiley & Sons Ltd, 1998,
ISBN 0-471-97143-X.
[10] W. R. Powell, “An analytical expression for the average output power of a wind machine,”Solar
Energy, vol. 26, no. 1, pp. 77-80, 1981.

CHAPTER 2. AERODYNAMIC CONVERSION MODELING 28
[11] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, H. Kinjo, and T. Funabashi, “Gain scheduling
control of variable speed WTG under widely varying turbulence loading,”Renewable Energy,
vol. 32, no. 14, pp. 2407-2423, 2007.
[12] J. G. McGowan, and S. Connors, “Windpower: A turn of the century review,”Annual Review of
Energy and the Environment, vol. 25, pp. 147-197, 2000.
[13] EPRI (Electric Power Research Institute), “Big Spring Wind Power Project, Second-Year Op-
erating Experience: 2000-2001,” Final Report, DOE-EPRI Wind Turbine Verification Program,
Dec. 2001.
[14] DOE/TVA/EPRI (DOE, Tennessee Valley Authority, and Electric Power Research Institute),
“Tennessee Valley Authority Buffalo Mountain Wind Power Project, First- and Second-Year Op-
erating Experience: 2001-2003,” DOE-EPRI Wind Turbine Verification Program, Dec. 2003.
[15] J. F. Manwell, A. Rogers, and J. G. McGowan,Wind Energy Explained: Theory, Design, and Ap-
plication, Chichester, United Kingdom: John Wiley & Sons Ltd., 2002. ISBN:978-0471499725.
[16] E. B. Muhando, T. Senjyu, N. Urasaki, H. Kinjo, and T. Funabashi, “Online WTG dynamic
performance and transient stability enhancement by evolutionary LQG,”Proc. IEEE Power En-
gineering Society General Meeting, 24-28 June 2007, pp. 1-8. doi:10.1109/PES.2007.385499.
[17] E. B. Muhando, T. Senjyu, O. Z. Siagi, and T. Funabashi, “Intelligent optimal control of wind
power generating system by a complemented linear quadratic Gaussian approach,”Proc. IEEE
Power Engineering Society Conference and Exhibition, PowerAfrica 2007, 16-20 July 2007, pp.
1-8.
[18] R. B. Corotis, “Stochastic modeling of site wind characteristics,” ERDA Report, September
1977, RLO/2342-77/2.
[19] R. B. Corotis, A. B. Sigl, and J. Klein, “Probability models of wind velocity magnitude and
persistence,”Solar Energy, vol. 20, no. 6, pp. 483-493, 1978.
[20] J. Asmussen, D. Manner, G. L. Park, and E. L. Harder, “An analytical expression for the specific
output of wind turbine generators,”Proceedings of the IEEE, vol. 66, no. 10, pp. 1295-1298, Oct.
1978. ISSN: 0018-9219.

Chapter 3
Drive-train Modeling
3.1 Introduction
VARIABLE speed wind turbine systems provide better dynamic performance characteristics
than fixed speed configurations. The power train components are subject to highly irregular
loading input from turbulent wind conditions, and the number of fatigue cycles experienced by the
major structural components can be orders of magnitude greater than for other rotating machines. A
modern wind turbine operates for about 13 years in a design life of 20 and is almost always unat-
tended [1],[2]. Thus, considering challenges posed by the severity of the fatigue environment, wind
technology has a unique technical identity and R&D demands, and repeated loadings need to be taken
into account in wind generating system design. In the sequel, the relevance of detailed representations
of the structural dynamics of variable speed WECS on transient stability studies is assessed.
Most of the DOIG wind turbine models used in dynamic stability studies include a drive-train
model. Due to the increased compliance of the drive-train of almost every wind turbine (usually
achieved by “soft” axes or special elastic couplings), suitable multimass equivalents must be em-
ployed in order to represent the low frequency torsional modes that dominate the dynamic behavior
of the wind turbine. Such multimass equivalents for modeling the drive-train fall in either of two
categories: the so-called two-mass model [3]–[6], or the frequently used lumped model approach,
which assumes that all the rotating masses can be treated as one concentrated mass [7]–[9]. However,
simplification of the drive-train model may have a negative impact on the accuracy of wind-generator
modeling [10],[11]. Particularly, the lumped model approach may be insufficient in the case of tran-
sient analysis. In this thesis the model of the wind turbine drive-train is represented by means of a
three-mass model considering an equivalent system with an equivalent stiffness and damping factor
on the wind turbine rotor side [12].

CHAPTER 3. DRIVE-TRAIN MODELING 30
Wind
Wind turbine
Low-speed shaft
GearboxRatio 1:n
High-speed shaft Generator
Grid
Torquecontrol Converter
AC
AC
Pitchcontrol
CONTROL SYSTEM
(a) Main components of the WECS
GeneratorTurbine rotor
J t
Jg
J1
J 2 Γ g
Γ t Γ 1
Γ 2
ω g
ω t ω 1
ω 2 D g
D t
K t
K g
K gr
(b) 3-inertia system
Figure 3.1: Dynamic drive-train equivalenced by a 3-inertia system interlinked by a flexible shaft.
3.2 Power train Modeling Concept
The physical diagram of the variable speed WECS system is shown in Fig. 3.1(a). The mechanical
part of the wind turbine consists of a shaft system and the rotor of the wind turbine itself. The torque
induced by the aerodynamics on the rotor disk is transmitted to the generator by a series of turbine
structures: blades, hub, low-speed shaft, gearbox, and high-speed shaft. The torque applied to the
generator shaft is not the same as the aerodynamic torque in the blades because of the flexibilities of
these rotor structures. During a transient event torque oscillations may be introduced in addition to
the aerodynamic torque due to the rotor structural dynamics. These torque oscillations are associated
with the torsional flexibility of the shafts. When the shafts are assumed rigid, the drive-train can
be represented by a single-mass model. If the torsional flexibility of the shafts is included, then the
drive-train is represented as a multimass model where the blade bending dynamics are neglected.
Variable speed WECS show large inertias and low shaft stiffness, and the interaction between the
wind turbine and electrical generator could give rise to low frequency oscillations that can limit the
transient stability of the system. Representing the mechanical system as a lumped mass may give
optimistic results especially for fixed speed induction generators (FSIGs), but an elaborate model is
necessary for a variable speed WECS, as the mechanical and electrical frequencies are decoupled.

CHAPTER 3. DRIVE-TRAIN MODELING 31
To enhance design of a suitable controller for damping the torsional oscillations, a multimass
model is adopted in this study to formulate the state space for analyzing system response to distur-
bances at steady state. Fig. 3.1(b) illustrates the mechanical equivalent 3rd-order model of the WECS
drive-train, consisting of rotating masses (rotor with the asynchronous generator) elastically coupled
to each other by a linear torsional spring and a linear torsional damper. The nomenclature is ex-
plained as follows.Jt, Jg are the wind turbine and generator moments of inertia,J1,2 represents the
inertia of the gearwheels,ωt, ω1,2, ωg are the wind turbine, gearbox wheels, and generator mechanical
speeds,Kt, Kg are the spring constants indicating the torsional stiffness of the shaft on wind turbine
and generator parts, andDt, Dg are respective damping constants on turbine and generator sides (K
represents the elastic properties of the shaft element whileD models internal viscous friction).
The wind turbine is driven by a rotor torqueΓt extracted from the wind, which is delivered, through
a gearbox with gear ratioKgr, to the generator that yields a generator torqueΓg. As a consequence,
the gearbox experiences a torsional torque,Γd . The shaft system gives a soft coupling between the
heavy turbine and the light generator rotor, thus the effective shaft stiffness,Ks, is reduced by the
ratio 1/K2gr. In modern turbinesKgr is normally in the range 50 – 70, thereby rendering the shafts
extremely soft, withKs typically in the range 0.15 – 0.40 pu. This may be compared with shafts in
conventional power plants incorporating synchronous generators, where20 ≤ Ks ≤ 80 pu [13].
Considering the model with a single dominant resonant mode, the dynamic response of the rotor
driven at a speedωt by the aerodynamic torqueΓt written on the generator side has the expression
Γt = Jtdωt
dt+ Dtωt + Kt(θt − θ1). (3.1)
Similarly, the generator is driven by the high speed shaft torqueΓ2 and braked byΓg
−Γg = Jgdωg
dt+ Dgωg + Kg(θg − θ2). (3.2)
The torsional torque experienced by the low speed shaft is comprised by the torques developed at the
gearbox, resulting from the torsional effects due to the difference betweenθt andθg:
Γ1 = J1dω1
dt+ Dtω1 + Kt(θ1 − θt) (3.3)
Γ2 = J2dω2
dt+ Dgω2 + Kg(θ2 − θg) (3.4)
whereθt, θg are the angular positions of the shaft at the rotor and generator sides,Γ1 is torque that
goes in the gearbox,Γ2 (= Γ1/Kgr) is torque out from the gearbox, andω2 = Kgrω1.

CHAPTER 3. DRIVE-TRAIN MODELING 32
H tH gb
Γ t Γg
d t d gb d gD gbg
D hgb
ω ,θ t t K hgb K gbgω ,θgb gb ω ,θ g g
H gΓd
Figure 3.2: Schematic representation of the drive-train as a series of elastically coupled inertias.
3.3 Mechanical State Space System
Fig. 3.2 illustrates the mechanical equivalent. The interconnecting axes, disc brakesetc, are incor-
porated in the lumped inertias of the model. The elasticity and damping elements between adjacent
inertias correspond to the low and high speed shaft elasticities and internal friction, whereas the exter-
nal damping elements represent the torque losses. Adopting the per unit (pu) system (see Appendix
B.1), a Hamiltonian matrix [14],[15] may be generated by the state equations for the drive train me-
chanical equivalent, obtained using the inertias’ angular positions and velocities as state variables
d
dt
θ
· · ·ω
=
[0]3×3
... [I]3×3
. . . . . . . . . . . . . . . . . . . . . . . . . . .
−[2H ]−1[K]... −[2H ]−1[D]
θ
· · ·ω
+
[0]3×3
. . . . . .
[2H ]−1
Γ (3.5)
where[0]3×3 and [I]3×3 are the zero and identity3 × 3 matrices, respectively. Further, [2H] is the
diagonal3 × 3 inertia matrix of turbine, gearbox and generator inertias, [K] is the3 × 3 stiffness
matrix, whereKhgb andKgbg are the hub to gearbox and gearbox to generator stiffness coefficients,
while [D] is the3×3 damping matrix, whereDhgb andDgbg are relative dampings of elastic couplings,
anddt, dgb, dg are the external damping coefficients. These are expressed as follows:
[2H
]= diag(2Ht, 2Hgb, 2Hg)
[K]
=
Khgb −Khgb 0
−Khgb Khgb + Kgbg −Kgbg
0 −Kgbg Kgbg
[
D]
=
dt + Dhgb −Dhgb 0
−Dhgb dgb + Dhgb + Dgbg −Dgbg
0 −Dgbg dg + Dgbg

CHAPTER 3. DRIVE-TRAIN MODELING 33
Additionally, θT andωT are the vectors of the angular positions and angular velocities of the rotor,
gearbox and generator respectively, whileΓ T is the vector of the external torques acting on the turbine
rotor and on the generator rotor, conventionally accelerating,viz.
θT = [θt, θgb, θg], ωT = [ωt, ωgb, ωg], and ΓT = [Γt, Γd, Γg].
In the steady state condition, the input aerodynamic torqueΓt applied on the turbine rotor should
be counter-balanced by an opposing electromagnetic torque developed inside the induction machine.
Due to high turbine inertia relative toJg, and low shaft stiffness, this subjects the elastic shaft element
to a torsional twist, causing a point on the circumference of one end of the shaft to shift by a large
electrical twist angleθtg, in electrical radian, from the corresponding point on the other end of the
shaft. The angle generated per unit applied torque is computed as
dθtg
dt= ωb(ωt − ωg) (3.6)
whereωb = 2πfn is the base angular frequency andfn is nominal grid frequency (Hz). The resonance
lies in the most flexible part of the rotational system. Neglecting damping, the natural frequency of
vibration of the three mass model is given as [16],[17]
f1 =1
2π
(− b
2−
√b2 − 4c
2
) 12
(3.7)
f2 =1
2π
(− b
2+
√b2 − 4c
2
) 12
(3.8)
where
b = −[Kt
(1
Jt+
1
Jgb
)+ Kg
(1
Jgb+
1
Jg
)]and c = KtKg
Jt + Jgb + Jg
JtJgbJg.
The first-mode mechanical frequency of a typical wind turbine is in the 0 to 10 Hz range [18],
which is also the range for electromechanical oscillations. Consequently, the mechanical vibrations
of the WECS interact with the electromechanical dynamics. Therefore, in order to create an accurate
model of a wind generator for transient stability analysis, the first-mode mechanical turbine dynamics
must be accurately represented. By conducting a spectral analysis of the low-speed shaft torque for
the 2 MW WECS (wind turbine data is given in Appendix A), the frequencies of vibration of the rotor
structure are:f1 = 2.7 Hz, andf2 = 11 Hz.

CHAPTER 3. DRIVE-TRAIN MODELING 34
0
0.2
0.4
0.6
0.8
1
1.2
5 10 15 20 25
Γ t [M
Nm
]
Wind speed, vw [m/s]
(a) Aerodynamic torque
0
0.2
0.4
0.6
0.8
1
1.2
5 10 15 20 25
Γ d [M
Nm
]
Wind speed, vw [m/s]
(b) Gearbox torque
0 2 4 6 8
10 12 14
5 10 15 20 25
Γ g [k
Nm
]
Wind speed, vw [m/s]
(c) Generator torque
Figure 3.3: Steady state variation in aerodynamic, gearbox and generator torques with wind speed.
3.4 Drive-train Torque Dynamics
3.4.1 Steady-state Operation
The WECS system considered in this thesis employs a frequency converter to decouple the generator
from the fixed frequency of the grid, and uses pitch control to limit the power above rated wind speed.
The steady-state operating curve can be described with reference to the torque-speed characteristic:
• below rated the operating curve resembles a stall-regulated variable speed case
• above rated, blade pitch is adjusted to maintain the chosen OP.
Figs. 3.3(a)–(c) show the steady-state calculation results for aerodynamic, low-speed shaft, and gener-
ator torques, respectively. Fig. 3.3(a) shows how the aerodynamic torque increases with wind speed.
At high wind speeds (above rated) changing the pitch alters the trajectory of constant wind speed,
constraining it to the OP locus. Fig. 3.3(b) represents development of the low-speed shaft torque —
the shaft should experience reduced fluctuations to avoid cyclic fatigue stresses. From Fig. 3.3(c) it
can be observed that the torque demand is kept constant at rated value for all higher wind speeds (to
actively damp shaft torsional oscillations). Pitch control then regulates rotor speed.

CHAPTER 3. DRIVE-TRAIN MODELING 35
3.4.2 Operation under High Turbulent Inflow
Controller design in this thesis deals particularly with operation under high turbulence. Focus is on
the need to design control systems that properly account for the flexible modes of the turbine, and
maintain the stable closed-loop behavior of the WECS, mainly because
• under turbulent wind conditions, the power train components of a WECS are subject to highly
irregular loading input, and the number of fatigue cycles experienced by the major structural
components can be orders of magnitude greater than for other rotating machines;
• control that optimizes energy capture in medium to high wind speed regimes can also cause
undesirable torque fluctuations that result from the inertia of the rotor as the torque control
attempts to follow the wind.
The torque applied to the generator shaft is not equivalent to the aerodynamic torque due to flexibilities
of the drive train structures. During a transient event torque oscillations associated with the torsional
flexibility of the shafts are introduced in addition to the aerodynamic torque. A twisted shaft contains
potential energy; when a wind gust strikes the turbine, part of the extra power goes into shaft potential
energy rather than instantly appearing in the electrical output. This stored energy will then go from the
shaft into the electrical system during a wind lull. Thus a shaft helps to smooth out power fluctuations.
3.5 Remarks
An appropriate model of system behavior is the heart of control design. It is appreciated, however, that
a challenge is introduced in defining the level of detail required for each study (modeling, analysis,
and control design). In some situations representation of certain details of structural dynamics may not
be necessary if they have no impact on the electrical performance during the time frames of interest in
a particular study. At present, there are models that accurately represent the aerodynamic, mechanical
and electrical systems of WECS [19]-[22]. However, these models are normally developed in different
simulation platforms and the availability of reliable studies that investigate the dynamic interaction
that exists between the electrical and structural systems is limited.
In this study the importance of a detailed representation of the power train is assessed. Although
a nonlinear model is required for the simulation, a simple linear model is preferred for control design
purposes. Controller design is enhanced by the 3rd−order model developed in this Chapter, by devis-
ing effective control algorithms that reflect the plant dynamic characteristics as well as the anticipated
working environment.

CHAPTER 3. DRIVE-TRAIN MODELING 36
References
[1] W. D. Jones, “I’ve Got the Power,”IEEE Spectrum Magazine, vol. 43, no. 10 (INT), October
2006.Available online, http://www.spectrum.ieee.org/oct06/4661.
[2] W. D. Kellogg, M. H. Nehrir, G. Venkataramanan, and V. Gerez, “Generation unit sizing and cost
analysis for stand-alone wind, photovoltaic, and hybrid wind/PV systems,”IEEE Trans. Energy
Conversion, vol. 13, no. 1, pp. 70-75, Mar. 1998. DOI: 10.1109/60.658206.
[3] E. B. Muhando, T. Senjyu, H. Kinjo, and T. Funabashi, “Augmented LQG controller
for enhancement of online dynamic performance for WTG system,”Renewable Energy,
doi:10.1016/j.renene.2007.12.001.
[4] P. Ledesma, and J. Usaola, “Minimum voltage protection in variable speed wind farms,”Proceed-
ings IEEE Porto Power Tech 2001, 10-13 Sept. 2001, vol. 4, pp. 1-6.
[5] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Regulation of WTG
dynamic response to parameter variations of analytic wind stochasticity,”Wind Energy,
DOI:10.1002/we.236.
[6] ——, “Disturbance rejection by dual pitch control and self-tuning regulator for wind turbine
generator parametric uncertainty compensation,”IET Procs. Control Theory & Applications, vol.
1, no. 5, pp. 1431-1440, Sept. 2007. DOI: 10.1049/iet-cta:20060448.
[7] L. Holdsworth, X. G. Wu, J. B. Ekanayake, and N. Jenkins, “Direct solution method for initial-
izing doubly-fed induction wind turbines in power system dynamic models,”IEE Procs. Genera-
tion, Transmission and Distribution, vol. 150, no. 3, pp. 334-342, May 2003.
[8] ——, “Comparison of fixed speed and doubly fed induction wind turbines during power system
disturbances,”IEE Procs. Generation, Transmission and Distribution, vol. 150, no. 3, pp. 343-
352, May 2003.
[9] J. G. Slootweg, S. W. H. de Haan, H. Polinder, and W. L. Kling, “General model for represent-
ing variable speed wind turbines in power systems dynamics simulations,”IEEE Trans. Power
Systems, vol. 18, no. 1, pp. 144-151, Feb. 2003. doi:10.1109/TPWRS.2002.807113.
[10] S. K. Salman, and A. L. J. Teo, “Windmill modeling consideration and factors influencing the
stability of a grid-connected wind power-based embedded generator,”IEEE Trans. Power Sys-
tems, vol. 18, no. 2, pp. 793-802, May 2003.

CHAPTER 3. DRIVE-TRAIN MODELING 37
[11] E. B. Muhando, T. Senjyu, H. Kinjo, Z. Siagi, and T. Funabashi, “Intelligent optimal control of
nonlinear wind generating system by a modeling-based approach,”IET Procs. Renewable Power
Generation, (Accepted for publication).
[12] E. B. Muhando, T. Senjyu, H. Kinjo, and T. Funabashi, “Extending the modeling framework for
wind generation systems: RLS-based paradigm for performance under high turbulence inflow,”
IEEE Trans. Energy Conversion, 2007. (Accepted for publication).
[13] E. N. Henrichsen, and P. J. Nolan, “Dynamics and stability of wind turbine generators,”IEEE
Trans. Power App. Syst., vol. PAS-101, no. 8, 1982.
[14] K. R. Meyer, and G. R. Hall,Introduction to Hamiltonian Dynamical Systems and the ‘N’-body
Problem, Springer, pp. 34-35, 1991. ISBN 0-387-97637-X.
[15] S. Skogestad, and I. Postlethwaite,Multivariable Feedback Control: Analysis and Design, John
Wiley & Sons, Inc., 2/Ed., 2005. ISBN 978-0-470-01167-6.
[16] C. M. Harris,Shock and Vibration Handbook, 4th edition, McGraw Hill, pp. 38.1–38.14, 1996.
ISBN: 0 07 026920 3.
[17] W. T. Thomson,Theory of Vibration with Applications, 4th edition, Chapman & Hall, pp. 131–
145, 268–337, 1993. ISBN: 0 412 78390 8.
[18] D. J. Trudnowski, A. Gentile, J. M. Khan, and E. M. Petriz, “Fixed-speed wind-generator and
wind-park modeling for transient stability studies,”IEEE Trans. Power Systems, vol. 19, no. 4,
pp. 1911-1917, Nov. 2004. doi:10.1109/TPWRS.2004.836204.
[19] A. Petersson, T. Thiringer, L. Harnefors, and T. Petru, “Modeling and experimental verification
of grid interaction of a DFIG wind turbine,”IEEE Trans. Energy Conversion, vol. 20, no. 4, pp.
878-886, Dec. 2005. doi:10.1109/TEC.2005.853750.
[20] P. Novak, T. Ekelund, I. Jovik, and B. Schmidbauer, “Modeling and control of variable-speed
wind-turbine drive-system dynamics,”IEEE Control Systems Magazine, vol. 15, no. 4, pp. 28-38,
Aug. 1995. doi:10.1109/37.408463.
[21] L. Yazhou, A. Mullane, G. Lightbody, and R. Yacamini, “Modeling of the wind turbine with a
doubly fed induction generator for grid integration studies,”IEEE Trans. Energy Conversion, vol.
21, no. 1, pp. 257-264, Mar. 2006. doi:10.1109/TEC.2005.847958.
[22] T. Petru, and T. Thiringer, “Modeling of wind turbines for power system studies,”IEEE Trans.
Power Systems, vol. 17, no. 4, pp. 1132-1139, Nov. 2002. doi:10.1109/TPWRS.2002.805017.

Chapter 4
Electrical System Modeling
4.1 Introduction
THE increasing integration of the double-output induction generator (DOIG) systems controlled
by static converters for wind generation into power grids is currently a generalized tendency
in numerous countries. This fact is directly related with the control flexibility offered by static con-
verters that enhance maintaining the terminal voltage at a constant value when the IG operates with
variable speed as well as to allow independent active and reactive power control exchanged between
the machine and the grid with better use of the available wind energy. In addition to constant volt-
age, the grid-connected DOIG provides several attractive features during variable speed operation,
for instance: constant frequency, generation above the machine rated power, and relatively cheaper
and smaller converter as compared with squirrel cage or synchronous machines [1]–[3]. Nowadays
one of the most widely used generator types for units above 1 MW (installed either offshore or on-
shore), both for reasons of network compatibility and reduction in mechanical loads, is the DOIG for
effective variable speed operation [4].
Several studies undertaken on the DOIG as a mainstream configuration for large wind turbines
have shown that it is possible for the wind turbines to remain grid-connected during grid faults so that
they can contribute to the stability of the power transmission system [5],[6]. The main advantage of
the DOIG concept is that only a percentage of the power produced in the generator has to pass through
the power converter. Typically this is only 20%–30% compared with full power (100%) for a syn-
chronous generator-based wind turbine concept, and thus it has a substantial cost advantage compared
with the conversion of full power [7],[8]. The control performance of the DOIG is excellent under
normal grid conditions, allowing active and reactive power changes in the range of few milliseconds
owing to the presence of power electronics.

CHAPTER 4. ELECTRICAL SYSTEM MODELING 39
Turbine
ω t
Drive train gearbox
Rotor side converter
Grid sideconverter
==
~~
p ,q s s
Crowbar
Power converter control (voltage or PF)
Control mode selection: - normal operation - fault operation
Fault detection
Torque control
p ,q r rk p c r
P ref Q ref
Pitch angle control
DOIG
Figure 4.1: General schematic of the WECS: DOIG, converters and controllers.
4.2 Detailed Model of DOIG Unit with Converters
4.2.1 Construction and Operation Principle
Fig. 4.1 illustrates the wind turbine coupled to a grid connected 2 MW asynchronous DOIG. The
DOIG is a brushless wound-rotor electric machine incorporating the most optimum electromagnetic
core structure of any electric machine, but without the traditional Achilles’ Heel of the wound-rotor
doubly-fed electric machine (DIFG), which is the multiphase slip ring assembly with potential control
instability [9],[10]. By eliminating the multiphase slip ring assembly and guaranteeing stability at any
speed, the theoretical attributes of the wound-rotor DOIG are acquired: upto 50% reduction in system
cost, system electrical loss, and system physical size. Nothing approaches the brushless wound-rotor
DOIG machine, if cost, efficiency, and power density, combined, are the deciding factors.
The rotor in the generator has three pole pairs while the three phase stator winding is connected
directly to the grid synchronous frequency,ω0. Since the simulation of the fundamental power system
dynamic behavior does not require a detailed modeling of power electronics, the converters are mod-
elled as voltage source and/or current source. The rotor side converter (RSC) is assumed as a voltage
source injected into the rotor, whereas the grid side converter (GSC) is assumed to be a controlled
current source. As the RSC can provide reactive power control, the GSC may offer additional voltage
support capabilities in conditions of excessive speed ranges or in transient operations. Crowbar pro-
tection is included: in the event of excessive rotor current, this disconnects the converter and connects
the rotor circuit to a crowbar resistor instead. When the current drops back below a set value, the
crowbar disengages and the converter is reconnected.

CHAPTER 4. ELECTRICAL SYSTEM MODELING 40
DOIG
GeneratorPowersystemf ref
U dc
I dc
Figure 4.2: Main components of the frequency converter.
Fig. 4.2 shows the main components of the frequency converter. The DOIG connects to the
grid with a back-to-back voltage source converter that controls the excitation system. The main
components are an AC/DC converter, a DC-link and a DC/AC converter. When power is flowing
from the generator, the AC/DC converter acts like a rectifier, and the DC/AC converter acts like an
inverter. The DC-link can be used to attenuate voltage fluctuations. Control of the converter firing
angle makes it possible to control the electrical torque in the generator, allowing the turbine to be run
at variable speed. The frequency converter is used to transform the constant frequency and constant
voltage of the grid to variable frequency and voltage on the generator side, thereby maintaining the
frequency out of the generator on a stable level independent of the generator’s angular speed.
The stator active and reactive power (ps andqs) are fed directly to the network, while the rotor
active and reactive power (pr andqr) pass through the power converter. The converter efficiency,kc,
results in a loss of active power. The converter is controlled by two main control loops:
• a torque control loop that works by injecting a quadrature-axis voltage into the rotor circuit, and
• a voltage or power factor control loop, which works by injecting a direct-axis voltage.
The stator is directly coupled to the electrical power supply network, thus the generator stator voltage
always equals the grid voltage. By utilizing the converter, the network frequency is decoupled from
the mechanical speed of the machine and variable speed operation is possible, permitting maximum
absorption of wind power. A great advantage of the DOIG wind turbine is that it has the capability to
independently control active and reactive power. Moreover, the mechanical stresses on a DOIG wind
turbine are reduced in comparison to a fixed speed induction generator (FSIG). Due to the decoupling
between mechanical speed and electrical frequency that results from DOIG operation, the rotor can act
as an energy storage system, absorbing torque pulsations caused by wind gusts. Other advantages of
the DOIG include reduced flicker and acoustic noise in comparison to FSIGs. The main disadvantage
of DOIG wind turbines is their increased capital cost.
The fundamental dynamics of the frequency converter are very complex and nonlinear, albeit
considerably faster than the fundamental drive train dynamics and therefore can be neglected in the
modelling. This means that the generator torque will be equal to its reference value,Γg = Γg,ref .

CHAPTER 4. ELECTRICAL SYSTEM MODELING 41
Diode rectifier αLine-commutated inverter
Grid
Turbine
GearboxGenerator
Step-downtransformer
I i
U i
I d
U d1 U d2
U r
I r
I s
I T
R d L d
η = T
U sU i
U s
Figure 4.3: Simplified schematic of the electrical system. For purposes of formulating the systemequations, the diode rectifier represents the RSC while the line-commutated inverter models the GSC.
4.2.2 DOIG: Electrical Model
Fig. 4.3 is the functional scheme of the WECS with DOIG, detailing the frequency converter system
with dc–link. Finding an operational point of the DOIG in steady-state operation corresponds to
initialization [11]. Initialization of the DOIG model is essential prior to starting dynamic simulations,
and the following considerations are taken into account: the DOIG consists of a wound rotor IG with
a converter feeding into the rotor circuit, and it has a symmetrical three-phased winding distributed
around the uniform air-gap. Additionally, the voltage in the stator,Us, is applied from the grid while
the voltage in the rotor,Ur, is induced by the converter.
At initialization, the electric power operation point is defined by the incoming wind. The reactive
power initialized is in accordance with the control strategy chosen. In this research, the electric power
and the reactive power are initialized independently, and the generalized reduced order DOIG model
is developed based on the following conditions and assumptions:
1. The stator current is positive when flowing toward the machine.
2. The equations are derived in the synchronous reference frame fixed to the stator flux, using
direct (d) and quadrature (q) axis representation [12].
3. Theq-axis is 90 ahead of thed-axis in the direction of rotation.
4. Theq component of the stator voltage is chosen to be equal to the real part of the generator
busbar voltage obtained from the load flow solution that is used to initialize the model.
5. The dc component of the stator transient current is ignored, permitting representation of only
fundamental frequency components. Similarly, the higher order harmonic components in the
rotor injected voltages are neglected.

CHAPTER 4. ELECTRICAL SYSTEM MODELING 42
The DOIG can be simulated by the standard 4th order dq model, described by the following
equations against an arbitrary reference frame [13],[14]
usd = −rsisd − ωΨsq +1
ωb.d
dtΨsd (4.1)
usq = −rsisq + ωΨsd +1
ωb.d
dtΨsq (4.2)
urd = −rrird − (ω − ωt)Ψrq +1
ωb.d
dtΨrd (4.3)
urq = −rrirq + (ω − ωt)Ψrd +1
ωb.d
dtΨrq (4.4)
whereusd, usq are the stator voltaged andq components,urd, urq are the rotor voltaged andq com-
ponents,isd, isq, ird, irq are the stator and rotord andq windings currents, andrs, rr are the stator and
rotor windings resistances. The inputsusd andusq of the model are directly available from the known
stator voltage, while the rotor voltagesurd andurq are computed from the converters and dc filter
equations. Additionally,ω is the arbitrarydq frame electrical angular speed,ωb = 2πfn is the base
angular frequency, andfn is the nominal grid frequency in Hz. The flux equations are obtained as
Ψsd = −Xsisd + Xmird (4.5)
Ψsq = −Xsisq + Xmirq (4.6)
Ψrd = −Xmisd + Xrird (4.7)
Ψrq = −Xmisq + Xrirq (4.8)
whereXs, Xr are the stator and rotor windings reactance, andXm is the magnetizing reactance. The
state-space modelling of the induction machine considers the voltage equations (4.1)–(4.4) and flux
equations (4.5)–(4.8) in the arbitraryd–q synchronous reference frame. The space model for the flux
can be written using fluxes as state variables [4], as
d
dt
Ψsd
Ψsq
Ψrd
Ψrq
= − 1
B
rsXr −ωB −rsXm 0
ωB rsXr 0 −rsXm
−rrXm 0 rrXs −(ω − ωt)B
0 −rrXm (ω − ωt)B rrXs
Ψsd
Ψsq
Ψrd
Ψrq
+
usd
usq
urd
urq
(4.9)
whereB = XsXr − X2m andω = pω0, with p being the number of pole pairs of the machine, and
ω0 being the synchronous mechanical speed obtained asω0 = 2πf0, wheref0 is the mechanical drive
train eigenfrequency (Hz).

CHAPTER 4. ELECTRICAL SYSTEM MODELING 43
For convenience, (4.9) is rewritten with the currents as inputs to the system model, achieved by
substituting (4.5)–(4.8) in (4.1)–(4.4) and solving for the derivatives of the currents. This yields the
state equations with the currents as state variables, expressed in the arbitrarydq reference frame:
d
dt
isd
isq
ird
irq
=ωb
B
−rsXr (ωB + ωtX
2m) −rrXm −ωtXrXm
−(ωB + ωtX2m) −rsXr ωtXrXm −rrXm
−rsXm ωtXsXm −rrXs (ωB − ωtXsXr)
−ωtXsXm −rsXm −(ωB − ωtXsXr) −rrXs
isd
isq
ird
irq
+ωb
B
−Xr 0 Xm 0
0 −Xr 0 Xm
−Xm 0 Xs 0
0 −Xm 0 Xs
usd
usq
urd
urq
. (4.10)
The inputs to the modelusd, usq are directly available from the known stator voltage, while the rotor
voltagesurd, urq are computed from the converters and dc filter equations. The generator electromag-
netic torque,Γg, can be expressed in terms of stator and rotor fluxes as
Γg = Ψsdisq − Ψsqisd ≡ Ψrdirq − Ψrqird (4.11)
which may be set in terms of the reactances and currents as
Γg = Xm(isqird − isdirq) (4.12)
and from (3.2), assuming generator convention
−Jgdωg
dt= −
[Kg(θ2 − θg) + Dgωg
]+ Γg (4.13)
whencedωg
dt=
1
Jg
[Γd − Xm(isqird − isdirq)
]. (4.14)
By controlling the firing angle of the converter, it is possible to control the electrical torque in the
generator. The torque control using the frequency converter allows the wind turbine to run at variable
speed and thereby makes possible a reduction of the stress on the drive train and the gearbox [15].

CHAPTER 4. ELECTRICAL SYSTEM MODELING 44
The following relations hold for the diode rectifier (RSC) and thyristor inverter (GSC) in Fig. 4.3:
Ud1 =3√
3
πUr (4.15)
Ir =2√
3
πId (4.16)
Ud2 =3√
3
πUicosα ≡ 1
ηT· 3
√3
πUscosα (4.17)
Ii =2√
3
πId (4.18)
whereUd1, Ud2 are the rectifier and inverter dc voltages,Id the dc current,Ur, Ir the peak phase rotor
voltage and current,Ui, Ii the peak phase values of inverter output voltage and current,α the inverter
firing angle,Us the bus voltage peak phase value, andηT = Us/Ui is the rotor transformer ratio. The
dc link RL filter differential equation is obtained from
Ud1 − Ud2 = RdId + LddId
dt(4.19)
whereRd andLd are the choke resistance and inductance, and all quantities are in absolute values (i.e.
V, A, Ω, and H). Expressing (4.19) in p.u., eliminatingUd1 andUd2 by (4.15) and (4.17) respectively,
and substitutingIr for the dc currentId from (4.16):
Ur + Uc = R′dIr +
X ′d
ω0
dIr
dt(4.20)
whereUc is the voltage of the inverter cosine firing angle controller:
Uc =ηM
ηT
Uscosα (4.21)
while R′d andX ′
d are the dc filter resistance and reactance, referred to the stator of the DOIG:
R′d = η2
M
π2
18
Rd
ZsB
and X ′d = η2
M
π2
18
ω0Ld
ZsB
(4.22)
with ZsB the stator base resistance andηM the equivalent stator/rotor turn ratio of the DOIG. The rotor
voltage and current,Ur andIr, are related to the respectived andq components by:
Ur =√
u2rd + u2
rq (4.23)
Ir =√
i2rd + i2rq . (4.24)

CHAPTER 4. ELECTRICAL SYSTEM MODELING 45
q
d
U
urd
r
i rq
i rd
urq
Ir~
~
Figure 4.4: Relative position of rotor fundamental voltage and current phasors.
Ignoring the harmonics and the commutation phenomena of the diode rectifier, its reactive power
consumption is zero and therefore the rotor voltage and current are displaced by 180 as shown in
Fig. 4.4 (the rotor current conventionally enters the rotor terminals). Hence
Ur = − Ir
Ir
Ur ⇔(
urd =ird
Ir
Ur, urq =irq
Ir
Ur
). (4.25)
Differentiating (4.24)
dIr
dt=
irddird
dt+ irq
dirq
dt
Ir
=RedeIr
dtI∗r
Ir
(4.26)
where the complex representationF of a dq quantityf (voltage, current or flux) and its derivatives
are defined respectively as
F = fd + jfq anddF
dt=
dfd
dt+ j
dfq
dt(4.27)
and its complex conjugate is denoted by the superscript “∗”. Substituting the derivatives of the rotor
current from (4.11) in (4.26), the following expression is obtained
dIr
dt= − ωb
BIr
[XmP1 + rrXsI
2r − Xs(urdird + urqirq)
]= − ωb
BIr
(XmP1 + rrXsI
2r − XsUrIr
)(4.28)
where the quantityP1 is given by
P1 = Re[
Us + (rs + jωrXs)Is
]I∗r
. (4.29)
Combining (4.28) with (4.20) and solving for the rotor voltage,Ur, yields the following relation
Ur =(rrXsX
′d − BR′
d)Ir + BUc + XmX ′dP1/Ir
B + XsX ′d
. (4.30)

CHAPTER 4. ELECTRICAL SYSTEM MODELING 46
4.2.3 DOIG: a Mechanical Perspective
The asynchronous DOIG has mechanical properties that render it very suitable for WECS applica-
tions, including good overload handling and ability to accommodate changes in the torque applied by
the wind turbine’s rotor shaft (via the transmission), thereby reducing overall mechanical wear and
tear over the generator’s service life. A modern variable speed drive is capable of accepting a torque
demand and responding to this within a very short time to give the desired torque at the generator
air-gap, irrespective of the generator speed (as long as it is within specified limits). A first order lag
model is provided for this response
Γg =Γg,ref
1 + τes(4.31)
whereΓg,ref is the demanded torque,Γg is the air-gap torque, andτe is the time constant of the
first order lag. Note that the use of a small time constant may result in slower simulations, without
much effect on accuracy. A variable speed WECS requires a controller to generate an appropriate
torque demand, such that the turbine speed is regulated appropriately. Additionally, the minimum
and maximum generator torque must be specified; motoring may occur if a negative minimum is
specified. The phase angle between current and voltage, and hence the power factor, is specified
on the assumption that, in effect, both active and reactive power flows into the network are being
controlled with the same time constant as the torque, and that the frequency converter controller is
programmed to maintain constant power factor.
An option for drive-train damping feedback is provided. This represents additional fuctionality
that may be available in the frequency converter controller, which adds a term derived from measured
generator speed onto the incoming torque demand. This term is defined as a transfer function acting
on the measured speed. The transfer function is supplied as a ratio of polynomials in the Laplace
operator,s. Thus the equation for the air-gap torque becomes
Γg =Γg,ref
1 + τes+
Num(s)
Den(s)ωg (4.32)
where, in this study, Num(s) and Den(s) are the following polynomials
Num(s)
Den(s)=
15.123s
0.002643s2 + 0.0257s + 1.0. (4.33)
The transfer function represents a tuned bandpass filter designed to provide additional damping for
the drive-train torsional vibrations, which in the case of variable speed operation may otherwise be
very lightly damped, sometimes causing severe gearbox loads.

CHAPTER 4. ELECTRICAL SYSTEM MODELING 47
800 900
1000 1100 1200 1300 1400 1500 1600
5 10 15 20 25
Gen
erat
or s
peed
, [r
pm]
Wind speed, vw [m/s]
(a) Generator speed
0 2 4 6 8
10 12 14
5 10 15 20 25
Γ g [k
Nm
]
Wind speed, vw [m/s]
(b) Generator torque
0
0.5
1
1.5
2
2.5
5 10 15 20 25
Pow
er,
[MW
]
Wind speed, vw [m/s]
PmPe
(c) Shaft power,Pm, and electrical output power,Pe
Figure 4.5: Steady-state generator parameters’ variation with wind speed.
4.3 DOIG Operation under Steady-state and Fault Conditions
4.3.1 Steady-state Analysis
Below rated wind speeds, the steady-state (Γg—ωg) operating curve is determined by the target of
maximizing energy capture by following a constant TSR load line that corresponds to operation at the
maximumcP . Pitch control is used to limit the power above rated wind speed. Blade pitch is adjusted
to maintain the chosen OP by altering the lines of constant wind speed and constraining the WECS
to the OP locus. Once rated torque is reached, the torque demand is kept constant for all higher wind
speeds, and pitch control regulates the rotor speed. The parameters needed to specify the steady state
operating curve are: the minimum speed,ωg,min, the maximum speed in constant TSR mode,ωg,max,
the maximum steady-state operating speed, and above-rated torque set-point.
Figs. 4.5(a)–(c) show results of steady state calculations for variation in generator speed and
generated powers with wind speed. Electric power,Pe, is generated whenωt > ω0, whereω0 denotes
the system synchronous speed.

CHAPTER 4. ELECTRICAL SYSTEM MODELING 48
1.06 1.07 1.08 1.09 1.1
1.11 1.12 1.13 1.14 1.15 1.16
0 0.2 0.4 0.6 0.8 1
Spe
ed, [
pu]
t, [s]
(a) Generator speed
-2
-1
0
1
2
3
0 0.2 0.4 0.6 0.8 1
Rot
or c
urre
nt, I
r [pu
]
t, [s]
d-Axisq-Axis
(b) Rotor current:d-axis andq-axis
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
Pow
er, [
pu]
t, [s]
(c) Turbine power,Pm
Figure 4.6: DOIG single phase fault.
4.3.2 Transient Response and Fault-ride-through Analysis
Analysis of voltage restoration capability with various controllers is dealt with inPart II of the
thesis. However, Fig. 4.6 serves to illustrate the relatively fast recovery of the DOIG when subjected
to a single phase fault. Timet = 0 is the time immediately after a fault. It is seen in Fig. 4.6(a)
that the fault causes the speed to rise from 1.08 pu to a high of 1.14 pu at 0.14 seconds. More
importantly, severe fluctuations in bothd- andq-axis currents are attenuated within 0.4 seconds after
the fault, as observed in Fig. 4.6(b). In this case, the fault is not significant to trigger the over-current
protection, and thus the DOIG is able to ride through the incurred voltage dip. The implication is that
approximately 60 ms after the fault is cleared the terminal voltage is recovered (back to the steady
state value) and the currents resume their respective variation. Fig. 4.6(c) shows the generated power.
The fast voltage recovery is a plus with respect to the DOIG’s capability to control the reactive
power. For a serious fault, the current flowing through the power converter may be too high, which
may cause damage to the RSC. Thus the DOIG is equipped with an over-current protection — in
case the rotor current magnitude reaches the setting value of the protection relay, the converter is
subsequently blocked. The setting point of the protection relay is set at 1.5 pu.

CHAPTER 4. ELECTRICAL SYSTEM MODELING 49
4.4 Remarks
Variable speed WECS utilize the available wind resource more efficiently especially during light wind
conditions. The effect of wind power integration in the grid depends on both the power system de-
sign to which the WECS is connected and the turbine control ability to fulfil the grid requirements.
This fact has challenged different wind turbine manufacturers regarding the ability of different wind
turbine concepts to comply with high-power system operator requirements [16]-[18]. Model simula-
tion studies to understand the impact of system disturbances on wind turbines and consequently on
the power system itself abound [19]-[21]. The presence of power electronics inside modern WECS
provides large potential for control capability and provides a versatile electronic interface for the grid
connection. The doubly outage induction machine is a wound-rotor type and is directly connected to
the grid with little additional conditioning. Due to the relatively constant operating conditions, the
DOIG has several advantages over conventional induction machines in wind power applications:
1) Ability to control reactive power — since the rotor voltage is controlled by a power electronics
converter, the DOIG is able to both import and export reactive power; this has important conse-
quences for power system stability and allows the machine to remain connected to the system
during severe voltage disturbances.
2) Ability to control the rotor voltage — this enables the induction machine to remain ‘synchro-
nized’ with the grid while the wind turbine varies in speed.
3) Decoupling of the electric and the reactive power control with independent control of torque
and rotor excitation current.
By decoupling (item 3), the DOIG can be excited from the rotor circuit by the rotor converter, but not
necessarily from the power grid. Thus there exist two distinct principal situations:
• When connected to a strong power system where the voltage is (or about) 1 pu, the DOIG
will be excited from the rotor circuit by the rotor converter; however, the DOIG does not ex-
change reactive power with the power system (i.e., the DOIG will produce electric power and
be reactive-neutral with the power network).
• When connected to a weak power system characterized by fluctuating voltages, the DOIG can
be ordered to produce or absorb an amount of reactive power to control voltage; the DOIG
will produce electric power and exchange some reactive power with the grid to reach a desired
voltage in the vicinity of the connection point.

CHAPTER 4. ELECTRICAL SYSTEM MODELING 50
References
[1] H. de Battista, P. F. Puleston, R. J. Mantz, and C. F. Christiansen, “Sliding mode control of wind
energy systems with DOIG – power efficiency and torsional dynamics optimization,”IEEE Trans.
Power Systems, vol. 15, no. 2, pp. 728-734, May 2000. doi:10.1109/59.867166.
[2] M. Ermis, H. Ertan, M. Demirekler, B. M. Saribatir, Y. Uctug, M. E. Sezer, and I. Cardici, “Var-
ious induction generator schemes for wind-electricity generation,”Electric Power Systems Re-
search, vol. 23, pp. 71-83, 1992.
[3] Z. M. Salameh, and L. F. Kazda, “Analysis of the steady-state performance of the double output
induction generator,”IEEE Trans. Energy Conversion, vol. 1, no. 1, pp. 26-32, 1986.
[4] S. Muller, M. Deicke, and R. W. de Doncker, “Doubly fed induction generator systems for wind
turbines,”IEEE Industrial Applications Magazine, pp. 26-33, May/June 2002.
[5] I. Cadirei, and M. Ermis, “Performance evaluation of a wind driven DOIG using a hybrid model,”
IEEE Trans. Energy Conversion, vol. 13, no. 2, pp. 148-155, June 1998. doi:10.1109/60.678978.
[6] M. Y. Uctug, I. Eskandarzadeh, and H. Ince, “Modeling and output power optimization of a wind
turbine driven double output induction generator,”IEE Procs. Electric Power Applications, vol.
141, no. 2, pp. 33-38, March 1994.
[7] Z. M. Salameh, and L. F. Kazda, “Commutation angle analysis of a double-output induction
generator using a detailed d-q model,”IEEE Trans. Power Apparatus and Systems, vol. PAS-104,
no. 3, pp. 512-518, March 1985. doi:10.1109/TPAS.1985.318966.
[8] Z. M. Salameh, and S. Wang, “Microprocessor control of double output induction generator I:
inverter firing circuit,”IEEE Trans. Energy Conversion, vol. 4, no. 2, pp. 172-176, June 1989.
[9] Z. Fengge, T. Ningze, H. Wang, W. Li, and W Fengxiang, “Modeling and simulation of variable
speed constant frequency wind power generation system with doubly fed brushless machine,”Int.
Conf. Power System Technology, PowerCon 2004, 21-24 Nov. 2004, vol. 1, pp. 801-805.
[10] R. Krishnan, and G. H. Rim, “Modeling, simulation, and analysis of variable-speed constant
frequency power conversion scheme with a permanent magnet brushless DC generator,”IEEE
Trans. Industrial Electronics, vol. 37, no. 4, pp. 291-296, Aug. 1990. June 1989.
[11] E. B. Muhando, T. Senjyu, H. Kinjo, Z. O. Siagi, and T. Funabashi, “Intelligent optimal control
of nonlinear wind generating system by a modeling-based approach,”IET Proc. Renewable Power
Generation, (Forthcoming).

CHAPTER 4. ELECTRICAL SYSTEM MODELING 51
[12] R. Pena, J. C. Clare, and G. M. Asher, “Doubly fed induction generator using back-to-back
PWM converters and its applications to variable speed wind-energy generation,”IEE Proc. Elec-
tric Power Applications, vol. 143, no. 3, pp. 231-241, May 1996.
[13] J. B. Ekanayake, L. Holdsworth, W. XueGuang, and N. Jenkins, “Dynamic modeling of doubly
fed induction generator wind turbines,”IEEE Trans. Power Systems, vol. 18, no. 2, pp. 803-809,
May 2003. doi:10.1109/TPWRS.2003.811178.
[14] E. B. Muhando, T. Senjyu, and H. Kinjo, “Disturbance rejection by stochastic inequality con-
strained closed-loop model-based predictive control of MW-class wind generating system,”in
Proceedings of the Joint IEEJ and IEICE Conference, 19 Dec. 2007, pp. 91-99.
[15] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Disturbance rejection by
dual pitch control and self-tuning regulator for wind turbine generator parametric uncertainty
compensation,”IET Procs. Control Theory and Applications, vol. 1, no. 5, pp. 1431-1440, Sept.
2007. doi10.1049/iet-cta:20060448.
[16] L. Yazhou, A. Mullane, G. Lightbody, and R. Yacamini, “Modeling of the wind turbine with a
doubly fed induction generator for grid integration studies,”IEEE Trans. Energy Conversion, vol.
21, no. 1, pp. 257-264, Mar. 2006. doi.10.1109/TEC.2005.847958.
[17] J. L. Rodriguez-Amenedo, S. Arnalte, and J. C. Burgos, “Automatic generation control of a
wind farm with variable speed wind turbines,”IEEE Trans. Energy Conversion, vol. 17, no. 2,
pp. 279-284, June 2002. doi:10.1109/TEC.2002.1009481.
[18] J. Kabouris, and C. D. Vournas, “Application of interruptible contracts to increase wind-power
penetration in congested areas,”IEEE Trans. Power Systems, vol. 19, no. 3, pp. 1642-1649, Aug.
2004. doi:10.1109/TPWRS.2004.831702.
[19] V. Akhmatov, and P. B. Eriksen, “A large wind power system in almost island operation –
a Danish case study,”IEEE Trans. Power Systems, vol. 22, no. 3, pp. 937-943, Aug. 2007.
doi:10.1109/TPWRS.2007.901283.
[20] J. G. Slootweg, H. Polinder, and W. L. Kling, “Representing wind turbine electrical generating
systems in fundamental frequency simulations,”IEEE Trans. Energy Conversion, vol. 18, no. 4,
pp. 516-524, Dec. 2003. doi:10.1109/TEC.2003.816593.
[21] E. Muljadi, C. P. Butterfield, B. Parsons, and A. Ellis, “Effect of variable speed wind turbine
generator on stability of a weak grid,”IEEE Trans. Energy Conversion, vol. 22, no. 1, pp. 29-36,
Mar. 2007. doi:10.1109/TEC.2006.889602.

Chapter 5
Modeling Wind Field Dynamics
5.1 Introduction
WINDS come about as a consequence of the differential heating that powers a global atmo-
spheric convection system reaching from the Earth’s surface to the stratosphere that acts as
a virtual ceiling, leading to global circulation patterns. Globally, the wind energy resource is plentiful,
renewable, widely distributed, clean, and reduces toxic atmospheric and greenhouse gas emissions if
used to replace fossil-fuel-derived electricity. However, wind speed — certainly the most significant
wind energy parameter — is considered as one of the most difficult meteorological phenomena due
to its non-predictability [1]. Though the intermittency of wind seldom creates problems when using
wind power at low to moderate penetration levels, such intermittency has reportedly caused problems
for grid stability in areas where penetration is greatest.
In an effort to eliminate the need for measured data acquired over long periods of time, the IEC
61400-1 Standard [2] allows the use of statistical methods to generate turbulent wind fields. Current
design standards and certification rules accept the use of standard spectral models of turbulence such
as von Karman [3],[4] and Kaimal [5]. The importance of turbulent loading is now universally rec-
ognized, and it is now common practice to base load calculations on a model of the three turbulent
velocity components [6]. A considerable body of research has been undertaken for reliable prediction
and/or simulation of real-time wind speeds for analyzing WECS response to wind gusts [7]–[11].
Several models have been proposed, including the point source Box-Muller algorithm [12], the au-
toregressive moving average (ARMA) model [13],[14], among others. All these methods use, as a
starting point, auto-spectral and coherence descriptions of the turbulence. In this thesis, a constrained
stochastic simulation (CSS) approach [15],[16] is adopted. The method can be applied to generate
wind gusts from time series around events defined by means of a linear condition (constraint).

CHAPTER 5. MODELING WIND FIELD DYNAMICS 53
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 5 10 15 20 25 30 35 40
Ray
leig
h fu
nctio
n
Wind speed [m/s]
k=1.0k=2.0k=3.0k=4.0k=5.0
Figure 5.1: Rayleigh distribution for annual wind speed.k is the shape parameter.
5.2 Determination of Mean Wind Speed, vm
In the absence of manufacturer specifications with regard to turbine rated wind speed, the Rayleigh
distribution [17],[18] may be utilized in determining the average annual wind speed,µw. The Rayleigh
is a probability density function that describes the annual wind speed distribution and is used for
estimating the energy recovery from a wind turbine. The annualized energy output,E, for the WECS
is obtained as (see Appendix A.2.4)
E = 8760
∫ vf
vc
Pf(vw)dvw (5.1)
where 8760 is the number of hours in a 365-day year andP is the non-zero power captured corre-
sponding to wind speedvw, in the range from cut-in speed(vc) to furling-speed(vf). The Rayleigh
functionf(vw) is derived from the general Weibull function in (2.8) fork = 2. It has the form
f(vw|α) =vw
α2exp
[−(
vw√2α
)2]
(5.2)
whereα is the mode of the distribution, andvw is the instantaneous wind speed. This expression is
analogous to (2.8), withα related to the scale parameterc asα = c/√
2.
Fig. 5.1 shows annual Rayleigh distribution curves for a range of shape parameters; the area
under each curve is unity, with a standard deviationσ = α√
4−π2
. Due to physical reasons, the
seasonal wind speed,µw, cannot change abruptly, but instead only continuously. Once the Rayleigh
distribution is established, the turbulence level,σ∗, may be obtained and utilized in determining the

CHAPTER 5. MODELING WIND FIELD DYNAMICS 54
hub height average wind speed for simulations. Since
σ∗ √〈σ2〉
µw(5.3)
then using the the IEC 61400-1 Standard (ed. 3) for the representative turbulence intensity as detailed
in Appendix A.2.3
σ∗ = Iref
[(15m/s + 3Vhub)
3+ 1.28 × 1.44m/s
](5.4)
the average wind speed,Vhub, at hub height is empirically determined, which, to all intents and pur-
poses, is the effective mean wind speedvm. In this study, the seasonal mean wind speed at site,
µw = 7 m/s, andvm ≡ Vhub = 12.205 m/s.
5.3 CSS Model for Wind Turbulence, vt(t)
CSS imposes a set of linear constraints on a turbulent wind field — the speed increases with a certain
amount over a certain period in time and space. The simulated Gaussian field is the sum of a de-
terministic and a stochastic part. The deterministic part is time series given the specified constraints,
formulated as a variational problem where the constraints are introduced by means of Lagrange multi-
pliers. The starting point for the stochastic part is an ordinary Gaussian, homogeneous simulation that
is subsequently projected onto the orthogonal complement of the subspace spanned by the constraints.
For operation under turbulent wind, the following assumptions are made in the modeling:
a) att < 0 the power system is under steady-state conditions (almost constant wind speed) so that
the load flow algorithm can be used to evaluate the initial conditions;
b) no wind shear, either vertical or horizontal, is taken into account;
c) variations in the horizontal direction of wind speed are not considered thus ensuring perfect
tracking in the yaw direction (in practice this is not possible and causes 1–2% energy loss and
additional stress on components [16]).
In the model the turbulent wind field is represented by an expression for the temporal and spatial
cross correlation of wind speed fluctuations which is transformed to a frame of reference moving with
the rotor blades. In order to compute the dynamic response and loading of the wind turbine, this cross
correlation function is integrated with the linear model of the rotor aerodynamics model.

CHAPTER 5. MODELING WIND FIELD DYNAMICS 55
Signal shaping filter
τ w
σG w
v (t) w
v m
White noise Colored noise
k σ
Rayleigh distribution
Mean wind speed
v (t) tξ(t) Simulatedwind speed
v mNoise generator
w
w
+ +
Figure 5.2: Model for simulating wind speed behavior with CSS.
5.3.1 Formulating the Turbulence
In the sequel a concise outline is given of CSS as a probabilistic method to determine a suitable wind
speed profile as input for a wind turbine simulation tool. The design tool is for analyzing the extreme
response as well as determining the internal loads of the WECS as a function of time. CSS presents
a comprehensive method that may be applied for any event that can be expressed as a linear function
of the involved random variables. A basic assumption in applying CSS for this purpose is that the
extreme response is driven by wind turbulence and that the turbulence is Gaussian.
Fig. 5.2 shows the model for executing CSS in simulating wind speed behavior. The driving force
of the wind is normally distributed white noise produced by a random number generator. The discrete
signal produced has mean value zero and unit variance. The sequential signal values with the sample
time,T , are thus independent of each other.
The stochastic component of the wind field is modeled as follows. The linear model of the turbu-
lence component (wind gust),vt(t), is comprised by a first order filter disturbed by Gaussian noise
vt(t) = − 1
τw
vt(t) + ξ(t) (5.5)
whereξ(t) is white noise from the noise generator. The white noise is smoothed by a signal shap-
ing filter with transfer functionGw(jω) and time constantτw, thereby transforming it into colored
noise. Thekσw block serves to standardize the colored noise by the standard deviation,σw, of vm
(obtained statistically from the Rayleigh distribution) to yieldvt(t), which is ideally the summation
of independent harmonics with random phasesφk uniformly distributed over[0, 2π] that follow from
vt(t) =√
2K∑
k=0
[2Gw(ωk)∆ω
] 12cos(ωkt + φk) (5.6)
where∆ω = ωmax/K, andωk = k∆ω, whileωmax is an upper cut-off of the noise spectrum.ωk a set
of K equidistant frequencies.

CHAPTER 5. MODELING WIND FIELD DYNAMICS 56
The filter takes the form
Gw(jω) =Ξw
(1 + jωτw)56
(5.7)
whereΞw is the amplification factor. Selection of filter parameters depends on the long term mean
wind speed,µw, and the characteristic turbulence length scaleL that corresponds to the site roughness.
These parameters are obtained as
Ξw ≈√
2π
Γ(12, 1
3)
τw
Tand τw =
L
µw(5.8)
whereΓ designates the beta function. The turbulence component (5.6) may be rewritten as
vt(t) =
K∑k=0
Akcos(ωkt + φk) (5.9)
where the amplitude,Ak, of each discrete frequency component represents the power in a specific
frequency band
Ak(ωk) ≈√
2
∫ ∞
ω02
Sk(ωk) dω . (5.10)
The integral in (5.10) may be discretely approximated thus:
Ak(ωk) =√
2
√[Sk(ωk) + Sk(ωk+1)][ωk+1 − ωk]
2(5.11)
where the frequenciesωk are chosen to be logarithmically spaced to adequately represent the fre-
quency content.Ak is based on the area under a density functionS — the power spectral density of
the turbulence — represented by the filter. Substituting (5.8) in (5.7) yields the von Karman distribu-
tion [19]
Sk(ωk) =0.475σ2
wL
vm[1 +(ωk
Lµw
)] 56
(5.12)
and thus (5.9) becomes
vt(t) =
K∑k=0
√2Sk
τwcos(ωkt + φk). (5.13)
wheret is the discretized time.
It is noteworthy that the development ofvw(t) assumes normal distribution. Non-Gaussianity of
wind turbulence and how to incorporate it in constrained simulation may be addressed by variational
calculus, as suggested by Nielsen et al. [20].

CHAPTER 5. MODELING WIND FIELD DYNAMICS 57
5.3.2 Setting the Constraints
Applying the Fourier transform to the wind gust component in (5.9) yields the series of the form:
vt(t) =
K∑k=1
akcosωkt + bksinωkt (5.14)
where, for normally distributed wind speed fluctuations, the Fourier coefficientsak andbk will also
be normal. Their means are zero, they are mutually uncorrelated, and their variances are2Sk/τw = 1.
Selecting gusts with amplitudeA at timet = t0 corresponds to applying the following constraints:
vw(t0) = A (5.15)
vw(t0) = 0 (5.16)
where the constraint (5.16) ensues from the fact that the ‘reference trajectory’ for the mean wind
speed,vm, is a constant. The desired gusts are automatically selected by a combination of (5.14) and
(5.15), leading to:
Gc = a (5.17)
with
G =
cosω1t0 cosω2t0 · · · cosωKt0 sinω1t0 · · · sinωKt0
−ω1sinω1t0 −ω2sinω1t0 · · · −ωKsinωKt0 ω1cosω1t0 · · · ωKcosωKt0
,
c =(a1 a2 · · · aK b1 b2 · · · bK
)T
, and
a = (A 0)T.
To obtain the desired wind gust, the Fourier coefficientsak, bk, which are normally distributed, should
satisfy the above conditions. The covariance matrixM of c is the diagonal with elements2Sk/Tw:
M = E[ccT] =2
τw
S1 0 0 0 0 0 0
0 S2 0 0 0 0 0
0 0 · · · 0 0 0 0
0 0 0 SK 0 0 0
0 0 0 0 S1 0 0
0 0 0 0 0 · · · 0
0 0 0 0 0 0 SK
. (5.18)

CHAPTER 5. MODELING WIND FIELD DYNAMICS 58
The constraint is that there is a peak of given heightA at timet0, expressed in (5.17). The constraint
may be conveniently expressed in terms of the unconstrained simulation time function:
A −Gc =
A − vw(t0)
−vw(t0)
(5.19)
and thus the constrained Fourier coefficients (5.14) are obtained as
ak,c = ak +Skcosωkt0∑
Sk(A − vw(t0)) +
Skωksinωkt0∑ω2
kSkvw(t0) (5.20)
and
bk,c = bk +Sksinωkt0∑
Sk
(A − vw(t0)) − Skωkcosωkt0∑ω2
kSk
vw(t0) . (5.21)
Thus having made an unconstrained simulation of the wind velocity, (5.20) and (5.21) determine the
Fourier coefficients that satisfy the gust constraints in (5.15) and (5.16).
5.4 Real-time Wind Speed Profile
For analysis of wind turbine loading, it is appreciated that the rotor interacts with a complex spatially
and temporally varying wind-field. However, the wind field may be represented by an effective wind
speed,vw(t), over the rotor disk. This wind speed is modelled as a stochastic process with two compo-
nents: the seasonal, slowly variable component,µw, and the rapidly variable turbulence component,
vt(t). Over short periods the wind speed can be approximated as the superposition of the mean wind
speed and the instantaneous turbulence component
vw(t) = vm + vt(t) (5.22)
wherevm Vhub is obtained from (5.4) that is based onµw determined by the Rayleigh distribution
while vt(t) is computed via CSS. Gaussian white noise and typical wind speed profiles are shown in
Figs. 5.3(a) and (b), respectively. It should be noted that the spectral characteristic of this effective
wind speed is very different from that of a point source. In order to obtain the distribution of the
extreme loading caused by a gust with arbitrary amplitude (for a givenvm), the different distributions
should be convoluted (weighed) with the occurrence probability of the individual gusts. Furthermore,
using the load distribution and resistance distribution of the structure the probability of failure can be
estimated. Together they constitute the tools leading to a more efficient and reliable WECS design.

CHAPTER 5. MODELING WIND FIELD DYNAMICS 59
-2-1.5
-1-0.5
0 0.5
1 1.5
2
0 5 10 15 20 25 30 35 40
Whi
te n
oise
sig
nal,
Z
t, [s]
(a) Gaussian white noise signal of zero mean, unit variance.
6
8
10
12
14
16
18
20
22
24
0 20 40 60 80 100
Win
d sp
eed,
v(t)
[m/s
]
t, [s]
vm=12,It=16%vm=12,It=18%vm=16,It=16%
(b) Wind speed profiles. Red line isvm = vr at a turbulence intensity of 16%, green line representsvm = vr at aturbulence intensity of 18%, and blue line is profile atvm = 16 m/s and turbulence intensity of 16%.
Figure 5.3: White noise and typical generated wind speed profiles by CSS at various mean windspeeds and turbulence intensities.
5.5 Remarks
Time domain simulations of wind gust events are of practical interest for wind turbine design calcula-
tions. Until relatively recently, calculations of the loading and behavior of wind turbines were based
on grossly simplified models of the wind: a steady wind speed, constant power or logarithmic law
model of wind shear, a constant flow inclination, and a dominant longitudinal component of turbu-
lence. Although such input enables a satisfactory calculation of the periodic loading, it provides no
basis for evaluating the random loads due to turbulence.
The current IEC-Standard considers extreme wind events as extreme load conditions that must
be considered as ultimate load cases when designing a wind turbine. Within the framework of the
IEC 61400-1 Std (ed. 3) [2],[21], these load situations are defined in terms of two independent site
variables — a reference mean wind speed and a characteristic turbulence intensity.
In this research CSS generates a spatial turbulent wind field at fixed points at the rotor disc, based
on a Class A turbulence site. For the seasonal mean wind speed of 7 m/s, cut-in wind speed of 4.0 m/s,
and operation at rated wind speed of the turbine equipment (12.205 m/s), the prevailing turbulence
intensities (longitudinal, lateral and vertical) are obtained as 16.0108%, 12.5465%, and 8.92472%,
respectively (see Appendix A.2.2, A.2.3).

CHAPTER 5. MODELING WIND FIELD DYNAMICS 60
References
[1] E. B. Muhando, T. Senjyu, N. Urasaki, H. Kinjo, and T. Funabashi, “Online WTG dynamic per-
formance and transient stability enhancement by evolutionary LQG,”IEEE Power Engineering
Society General Meeting, 24-28 June 2007, pp. 1-8. doi:10.1109/PES.2007.385499.
[2] International Electrotechnical Commission.IEC 61400-1: Wind Turbines Part 1: Design Re-
quirements.IEC 2005-08, 3rd edition, 2005.Available online, http://www.iec.ch.
[3] B. G. Rawn, P. W. Lehn, and M. Maggiore, “A control methodology to mitigate the grid impact
of wind turbines,”IEEE Trans. Energy Conversion, vol. 22, no. 2, pp. 431-438, 2007.
[4] W. E. Leithead, S. de la Salle, and D. Reardon, “Role and objectives of control for wind turbines,”
IEE Procs. Generation, Transmission and Distribution, vol. 138, no. 2, pp. 135-148, March 1991.
[5] T. Ekelund, “Speed control of wind turbines in the stall region,”Procs. 3rd IEEE Conference on
Control Applications, 24-26 Aug. 1994, vol. 1, pp. 227-232. doi:10.1109/CCA.1994.381194.
[6] W. Bierbooms, “A gust model for wind turbine design,”JSME International Journal, Series B,
Vol. 47, No. 2, pp. 378-386, 2004.
[7] F. Iov, F. Blaabjergg, A. D. Hansen, and Z. Chen, “Comparative study of different im-
plementations for induction machine model in Matlab/Simulink for wind turbine simula-
tions,” Procs. IEEE Workshop on Computers in Power Electronics, 3-4 June 2002, pp. 58-63.
doi:10.1109/CIPE.2002.1196716.
[8] R. A. Schlueter, G. L. Park, R. Bouwmeester, L. Shu, M. Lotfalian, P. Rastgoufard, and A.
Shayanfar, “Simulation and assessment of wind array power variations based on simultaneous
wind speed measurements,”IEEE Trans. Power Apparatus and Systems, vol. PAS-103, no. 5, pp.
1008-1016, 1984. doi:10.1109/TPAS.1984.318705.
[9] R. Karki, P. Hu, and R. Billinton, “Reliability evaluation of a wind power delivery system using
an approximate wind model,”IEEE Procs. 41st International Universities Power Engineering
Conference, UPEC ’06, 6-8 Sept. 2006, vol. 1, pp. 113-117. doi:10.1109/UPEC.2006.367726.
[10] P. Flores, A. Tapia, and G. Tapia, “Application of a control algorithm for wind speed prediction
and active power generation,”Renewable Energy, vol. 30, pp. 523-536, 2005.
[11] G. N. Kariniotakis, G. S. Stavrakakis, and E. F. Nogaret, “Wind power forecasting using ad-
vanced neural networks models,”IEEE Trans. Energy Conversion, vol. 11, no. 4, pp. 762-767,
1996.

CHAPTER 5. MODELING WIND FIELD DYNAMICS 61
[12] G. E. P. Box, and M. E. Muller, “A note on the generation of random normal deviates,”Ann.
Math. Stat., vol. 29, pp. 610-611, 1958.
[13] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, and T. Funabashi, “Robust predictive control of
variable-speed wind turbine generator by self-tuning regulator,”IEEE Power Engineering Society
General Meeting, 24-28 June 2007, pp. 1-8. doi:10.1109/PES.2007.385885.
[14] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “RLS-based self-tuning regu-
lator for WTG dynamic performance enhancement under stochastic setting,”Proc. The Interna-
tional Conference on Electrical Engineering, ICEE 2007, 8-12 July 2007, pp. 1-6.
[15] E. B. Muhando, T. Senjyu, Z. O. Siagi, and T. Funabashi, “Intelligent optimal control of wind
power generating system by a complemented linear quadratic Gaussian approach,”IEEE Power
Engineering Society Conference and Exposition, PowerAfrica 2007, 16-20 July 2007, pp. 1-8.
[16] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, H. Kinjo, and T. Funabashi, “Gain scheduling
control of variable speed WTG under widely varying turbulence loading,”Renewable Energy,
vol. 32, no. 14, pp. 2407-2423, 2007.
[17] R. B. Corotis, “Stochastic modeling of site wind characteristics,”ERDA Report, RLO/2342-
77/2, September 1977.
[18] R. B. Corotis, A. B. Sigl, and J. Klein, “Probability models of wind velocity magnitude and
persistence,”Solar Energy, vol. 20, no. 6, pp. 483-493, 1978.
[19] C. Nichita, D. Luca, B. Dakyo, and E. Ceanga, “Large band simulation of the wind speed for
real time wind turbine simulators,”IEEE Trans. Energy Conversion, vol. 17, no. 4, pp. 523-529,
Dec. 2002.
[20] M. Nielsen, G. C. Larsen, J. Mann, S. Ott, K. S. Hansen, and B. J. Pedersen, “Wind simulation
for extreme and fatigue loads,” Risø-R-1437(EN), 2003.
[21] IEC 61400-1 Standard: Wind Turbine Safety and Design Ed 3.Available online,
http://www.awea.org/standards

Part II
Control Strategies and Design for Wind
Energy Conversion Systems

Chapter 6
Control Philosophy
6.1 Introduction
CONTROL can significantly improve the energy capture by a wind turbine.Part II of this thesis
reviews techniques for the control of wind turbines during power production. Particularly, as
turbines become larger and more flexible, there is increasing interest in designing controllers with
load reduction as part of the primary objective, to mitigate loads as far as possible. Terms can be
introduced into the controller to help damp resonances, such as drive train torsion in variable-speed
turbines. Classical methods based on proportional-integral (PI) and proportional-integral-derivative
(PID) algorithms are a good starting point for many aspects of closed-loop controller design for fixed-
and variable-speed turbines.
With regard to energy extraction efficiency of WECs, controller design has centered mainly on
simple, linear, PID controllers [1]-[6] that are easily implemented in the field environment. Although
industry has embraced the PID controller, researchers have begun to investigate the capabilities of
more sophisticated control designs for ensuring efficient power conversion, especially multivariable,
multiobjective paradigms. Several advanced controllers are proposed and analyzed in this research,
including the linear quadratic Gaussian (LQG) [7]-[10] that has been shown to effectively optimize
power conversion for a wind power system across a whole range of operating regions [11], the self-
tuning regulator (STR) scheme [12]-[15], and model-based predictive control (MBPC) [16],[17].
These have an advantage over the PID since they can incorporate multiple inputs and multiple
outputs. However, in order to convince industry to invest in more complicated controllers it is nec-
essary to show that they are potentially able to guarantee long service life of the WECS, ensure low
maintenance and above all, maintain a high level of energy conversion. It is important to be able to
quantify the benefits of any new controller with particular regard to the variability of the real wind.

CHAPTER 6. CONTROL PHILOSOPHY 64
Advanced controller design methods can offer an explicit mathematical formulation for the de-
sign of controllers with multiple objectives, including load reduction. Such controllers have been
used on commercial turbines to a limited extent. For variable speed turbines, attention to detail in
the interaction of pitch and torque controllers can significantly improve energy capture without any
compromise on loads. Individual pitch control has potential for very significant load reduction but is
not yet commercially proven. The design of the control algorithms is clearly of prime importance.
Additional sensors such as accelerometers and load sensors can also help the controller achieve its
objectives more effectively.
As the size of wind turbines increases, and as cost reduction targets encourage lighter and hence
more flexible and dynamic structures, these aspects of controller design become increasingly im-
portant. A very basic controller might consist of a classical PI or PID algorithm acting on a single
measured signal (generator speed or power output) to generate a pitch demand. For variable-speed
turbines a torque demand is generated independently from a speed–torque look-up table. This basic
scheme can be greatly improved in a number of ways. This thesis covers the following possibilities:
• joint control of pitch and torque to improve the trade-off between energy and loads;
• using torque control to damp out torsional resonances, especially in the drive train.
These strategies are now routinely used in the industry.
Blade pitch control is primarily used to limit the aerodynamic power in above-rated wind speeds
in order to keep the turbine within its design limits, but it also has an important effect on structural
loads. Some optimization of energy capture below rated is also possible. Generator torque control
in variable-speed turbines is used primarily to maximize energy capture below rated wind speed by
controlling rotor speed, and to limit the transmission torque above rated, but it can also be used to
reduce certain loads. The algorithms used for controlling pitch and torque need careful design. In
addition to their effectiveness in meeting these primary objectives, the control algorithms can also
have a major influence on the loads experienced by the wind turbine. Clearly the algorithms must be
designed so as to prevent excessive loading, but it is possible to go further bydesigning them with
load reduction as an explicit objective— the main theme forPart II of this report.
This thesis illustrates the finding that, with careful design, more robust multiobjective and adaptive
controllers can be developed that can achieve better performance levels relative to classical linear
controllers and are much more likely to be adopted in practice. Finally, the importance of modeling
for controller design is stressed. Although field trials are useful, computer simulations are also vital,
and are utilized to evaluate performance.

CHAPTER 6. CONTROL PHILOSOPHY 65
Optimal control
Wind speed model
Windturbine rotor
Drive-train dynamics
Active/reactive power (P&Q) control
Qωt
vw
ref
P ref
βcmd β
vw
ω t
Γt
Γg
ω g
ω t
DOIG
Q ref
Pref
i dq_r
i dq_s
udq_s
ω g
udq_r
udq_s
udq_r
i dq_si dq_r
udq
ω g
Statorvoltage
Γg
Γt
1
2
6
34
5
Figure 6.1: Relational schematic of the WECS with DOIG, converters and controllers.
6.2 Control Concept
6.2.1 Model Overview
The most significant dynamics of the wind turbine have been modelled inPart I with emphasis on
control design. An entire nonlinear simulation model of the wind turbine can then be derived by
connecting the individual sub-models. Fig. 6.1 is the block diagram of the dynamic WECS model
that is applied to investigate power output performance, power train reliability, and transient voltage
stability in the sequel. The interconnections between the different dynamic components are depicted
as the respective blocks:
1) The aerodynamic model of the turbine rotor
2) The shaft system model — represents possible torsional oscillations in the shaft system
3) The electric generator model — it is a transient model
4) The converter and its control
5) The blade-angle (pitch) control and the servo model, and generator torque reference.
5) The wind model1.
The work presented inChapters 2–5 has been to develop subsystem models as part of a simulation
platform project in which the main idea is to extend the ability of the existing wind turbine design
tools to simulate the dynamic behavior of the wind turbines and the wind turbine–grid interaction.
One of the main targets is to improve the generator models used in advanced aeroelastic tools and
to add the electrical part of the wind turbine. In these aeroelastic tools the focus is on the frequency
scale between 0 and 20 Hz, because the main contribution to fatigue loads is in this frequency range.
1The wind model, strictly speaking, is not a component of the wind turbine model, but the output power calculationfor the WECS requires the knowledge of instantaneous wind speed. The instantaneous wind speedv w(t) is described by(5.1) inChapter 5.

CHAPTER 6. CONTROL PHILOSOPHY 66
P
ω t
ω g
β θ tg
Q
i ds
i qs
i dr
i qr
β cmd
ω g,ref
v t
u ds
u qs
Outputs y States x Inputs u
Γ g,ref
Figure 6.2: Complete dynamic model of inputs, state variables, and outputs.
Fig. 6.2 illustrates the complete WECS dynamic model, characterized by six inputsu, two outputs
y, and eight state variables. The inputs include pitch angle reference,βcmd, wind speed disturbance
vt, and adjustable control variables of the converter. State variables comprise 8 nonlinear equations:
(3.5) for the drive-train states fromChapter 3, and (4.11) for the induction machine (Chapter 4).
The active (P), and reactive (Q) powers injected into the grid are taken as model outputs.
Based on the state-space form of the induction machine dynamic model, the complete linearized
model is obtained, and then the reduced-order model that neglects the stator transients, and the steady-
state model are easily extracted. After that, the required transfer functions between the desired input–
output pair can be obtained. These transfer functions are useful in the linear design of the control
loops as well as in the analysis of the stability and response of the system under different operating
conditions. Based on the steady-state model, an analysis of the control variables is performed in order
to obtain the operational points of the DOIG. The developed models are used in controlling the DOIG
with a power electronic converter in the WECS. The focus is on analysis of the state-space modeling
of a 2 MW DOIG used in WECS applications, and the mechanical and aeroelastical aspects must be
considered to visualize the dynamic behavior.
Before the models can be used with confidence, they should have been validated by compar-
ing model results to measurements. To highlight the importance that an accurate representation of
the structural dynamics has for purposes of model validation of IG wind turbines, this study com-
pares the performance of the proposed modeling and control to the actual prototype values detailed
in Appendix A. The real advantage of the method is visible in the chosen highly turbulent wind
environment, presenting a noisy signal to the system. The simulation model is implemented in a
MATLAB/Simulink environment with the control target of ensuring response geared toward optimum
power conversion and minimizing shaft torsional torque variations without additional filtering.

CHAPTER 6. CONTROL PHILOSOPHY 67
Baselinecontroller
WECSWindspeed
Electric power
v
TURBULENCE
SEASONAL
DYNAMIC OPTIMIZATION
STEADY STATE OPTIMIZATION
m
v t
Γ bc
Γ prpΓ g,ref
Σ
∆ωω
Proposed multivariable controller
Key:
Generator command signal by proposed controller Generator command signal by baseline controllerΓ bc
Γ prp
Figure 6.3: Control strategy by the frequency separation principle.Γg,ref =∑(
Γbc + Γprp
).
6.2.2 Control Objectives
In this study the control problem is conveniently divided into two time scales corresponding to slow
mean wind speed changes and rapid turbulent wind speed variations. The mean speeds are treated
as steady state operating points. Fig. 6.3 illustrates the frequency separation principle utilized in
analyzing the system: steady state optimization assumes operation at the optimal wind speed while
with dynamic optimization the OP is bound to shift hence the need for an adaptive controller to
regulate the aerodynamic effects on the system. The WECS can be started at the wind speed of 4 m/s
and operated in the wind area up to 25 m/s. The control design objectives are:
To optimize power production in low to medium wind speeds, and to regulate turbine speed in
the above-rated region thereby maintaining rated power.
To specify the demanded generator torque to maintain stable closed-loop behavior over the
entire turbine operating envelope, which includes enhancing the damping to the drive train
torsion and mitigating the effects of wind speed disturbances.
The overall objective of the controller is to maximize energy production, whilst working within the
operational limits of the turbine, and minimizing the peak loadings experienced. While the wind is
highly stochastic, initial insight into this requirement can be gained by considering the situation when
the wind is steady and the turbine is in equilibrium. Three operating modes can be identified:
1. Energy capture limited by available wind energy
2. Energy capture limited by rotor speed constraints
3. Energy capture limited by generator rating
Overall, effectiveness of each proposed control scheme is evaluated based on the objectives, and
subject to operating constraints. A further, deterministic, extreme gust is employed to confirm the
ability of the controllers to maintain operation within the allowed rotor speed limits.

CHAPTER 6. CONTROL PHILOSOPHY 68
6.3 Control Strategy
The devised strategy is twofold: active power control for optimal conversion throughout the WECS
operating envelope, and generator torque control for alleviation of torsional loads on the power train.
6.3.1 Active Power Control
The control objectives of the active power control loop are achieved by speed control, based on the
following control strategies:
(a) Power optimization strategy — utilized for below rated wind speed, where the energy capture
is maximized by tracking the maximum power coefficient.
• The power reference is the wind turbine available power
• The speed reference is the optimal speed.
The turbine has to produce the optimum power corresponding to the maximum tracking power
point look-up table. The difference between the generator speed and its reference value is neg-
ative and, therefore, the generator torque controller’s output,Γg,ref , is increased systematically
thereby driving the TSR to its optimal value by varying the rotational speed. In this operational
regime, the pitch angle is kept constant at the lower limit (optimal value).
(b) Power limitation strategy — for above rated wind speed; power is limited to rated power,Pr.
• The power reference is the rated power
• The speed reference is the rated speed.
Speed controller keeps the generator speed limited to its rated value by acting on the pitch
angle. The difference between the generator speed and its rated value is positive, thus the pitch
controller kicks in and drives the pitch angle to positive values until the rated generator speed is
reached. The WECS has to produce less than it is capable of at a given wind speed. This action
implies both a larger dynamical pitch activity and a larger steady-state pitch angle.
6.3.2 Power-train Torsional Load Alleviation
In above rated wind regimes, generator torque control is utilized exclusively for overload prevention,
whereas blade pitch control is used for power limitation. The inverter controller holds the electrical
power constant at rated power, thus the turbine is prevented from following thecP,opt trajectory and
constrained to operate at lower values of TSR andcP . The power that the inverter injects into the grid
is completely independent of both the grid frequency and the DOIG speed.Γg,ref is for damping only.

CHAPTER 6. CONTROL PHILOSOPHY 69
Windspeed
Γaero
ωgenOptimal speed PI
Gainscheduling
τ Ratelimiter
Anglelimiter
Turbine rotor
Transmission system
Generatorfrequency converter
ref
ωgenmeas
PI+_
i qrefP mq
PI+_
i drefP md
PI+_
PI+_
MPTP
ωP el
Speed controller
Power controller Rotor current controller
Active powerreference
Reactive powerreference
Available power
+_
∆ω
K pi
βref +
_β
β
Γmech
ωgenmeasControl
signals
ACTIVE CURRENT CONTROL
REACTIVE CURRENT CONTROL
ACTIVE POWER CONTROL LOOP
REACTIVE POWER CONTROL LOOP
iqmeas
idmeas
P elMPTP
Q gridmeas
Q gridref
P gridmeas
P gridref
Figure 6.4: WECS control level.
6.4 Controller Design
6.4.1 Assigning the Control Tasks
As illustrated in Fig. 6.4, the WECS’s power capability is expressed in terms of instantaneous (short-
term) available power. This is based on the maximum power tracking point (MPTP) as a function of
the optimal speed. The wind turbine control level contains
• a slow control level (speed controller and a power controller), and
• a fast control level (frequency converter-rotor current controller).
In implementation, the converter controls the power of the WECS through two controllers in cascade:
1. The power controller (the external controller in the cascade controllers) provides a reference
rotor current to the rotor current controller (the internal controller in the cascade controllers),
which further controls the generator current and thus the generator torque.
2. The speed controller — controls generator speed to its reference value by acting on pitch angle.
The power controller ensures the power reference by acting on the current reference of the rotor
current controller and thus on the generator current/torque; this is achieved via two control loops:
(i) the active power control is achieved by controlling theq-axis component of the rotor current
(in a stator flux dq reference frame), while
(ii) the reactive power control is achieved by controlling thed-axis component of the rotor current
(the magnetizing current) collinear with the stator flux.
Note: rotor current controller generates rotor voltage components as control variables of the converter.

CHAPTER 6. CONTROL PHILOSOPHY 70
βs1
min
max
β
βcmdP ref
Gainscheduling
+_
PI
K + pp sKip
K PIP e
+ _
Figure 6.5: Pitch control system.
6.4.2 Pitch Actuator and Blade Servo
The actuator dynamics and implementation of the pitch control are depicted in Fig. 6.5. The pitch
angle controller is only active during high wind speeds. By varying the pitch angleβ, the aerodynamic
torque input to the rotor is altered and hence the output power. Because the inertia of the blades is
large and the actuator should not consume a great deal of power, the actuator has limited capabilities.
The goals of pitch control include:
Total active power,Pe, as high as possible subject to the conditionPe < Pr; this implies holding
the pitch angle at a mechanical limit:β = −2.
Pe remains at WECS rating,Pr, in the region of higher wind speeds; thusβ has to be modified
between−2 and30 to reducecP (λ, β).
Controller dynamics are nonlinear with saturation limits on both pitch angle and pitch rate. When
the pitch angle and pitch rate are less than the saturation limits, the pitch dynamics exhibit linear
behavior, thus the dynamics of the servo with the blades may be described by a first order transfer
function with a time constantτβ
β = − 1
τββ +
Kβ
τββcmd . (6.1)
The desired pitch command,βcmd, is the output of the pitch controller, and is fed to the pitch actuator
to regulate the pitch angle of the turbine blades. The desired pitch angle is selected so that the
generated power,Pe, follows Pref . The commandβcmd is the integral sum of the small changes of
pitch command(∆βcmd) over the sampling intervals, and can be represented as
βcmd =∑
−sgn∆P|∆βcmd| (6.2)
where∆P = Pe − Pref , and∆βcmd is derived by gain scheduling in the PI block. Output powerPe
is smoothed by a hydraulic servo system that drives the blades around their lengthwise axes.

CHAPTER 6. CONTROL PHILOSOPHY 71
-5
0
5
10
15
20
25
5 10 15 20 25
Pitc
h an
gle,
β [d
eg]
Wind speed, vw [m/s]
Figure 6.6: Variation of pitch angle with wind speed in steady state conditions.
Fig. 6.6 is a typical variation in pitch angle with wind speed at steady state conditions for the
WECS in this study. Gain scheduling serves to compensate for the large changes in the sensitivity of
aerodynamic torque to pitch angle over the operating range, since the WECS aerodynamic character-
istics vary according to the OP, and hencevw. Thus the proportional and integral gains are scaled by
the gain scheduling constant,KPI , in order to ensure suitable control loop characteristics are attained
at all wind speeds. Additionally, the rate limiter is applied to the output with instantaneous integrator
desaturation to prevent wind-up. The transfer functionC(s) between the power error andβcmd is:
C(s) =βcmd(s)
∆Pe(s)=
sKpp + Kip
s. (6.3)
Selection ofKpp, Kip, andKPI is by trial and error, based on minimizing deviations from the set-
point without excessive control action and without causing any instabilities. The proportional and
integral constants are respectivelyKpp = 0.0246 s andKip = 0.01025. KPI is given as follows:
KPI =
1, for −2 < β ≤ 0
β15
+ 1, for 0 < β ≤ 30
3, for β > 30
(6.4)
The servomotor, modeled as a first order system with time constantτβ = 0.05 s can operate
very fast, but allowance has been made for servo system delay, and possibility of other delayse.g.
communication delay, computational delay and conditional delay (to overcome Coulomb friction).
Thus the response of the pitch actuation system is not instantaneous. The pitch rate commanded by
the actuator is physically limited to maximum±8/s while the saturation level of the pitch angle is
from –2 to 90. These limits should not be reached during the normal operation in order to avoid not
only the fatigue damage and wear of the pitch actuator, but also the loss of performance. It should
be mentioned that in power control mode lower values of pitch rate are desirable, however, for speed
control mode the larger pitch rate value shows better transient performance.

CHAPTER 6. CONTROL PHILOSOPHY 72
6.4.3 Generator Torque Controller
6.4.3.1 Baseline Controller
The choice of generator torque as a control input is motivated by the fact that when connecting the
generator to the grid via the frequency converter, the generator rotational speed,ωg, will be indepen-
dent of the grid frequency. This decoupling enables variable speed operation, and a control strategy
based on wind speed regime may be formulated:
I. At low and moderate wind speeds generator speed,ωg, is controlled to maximize energy capture
by operating continuously at the TSR that results in the maximum power coefficient. The target
is to track the OP locus (λopt, cP,opt) by regulating the generator torque to yield the optimum
power conversion,Pm,opt:
Pm,opt =1
2ρΛcP,opt
( R
λopt
)3
ω3t . (6.5)
A standard baseline controller is then designed to keep the turbine operating at the peak of its
cP -TSR-pitch surface, executed in accord with the expression
Γref = KT ω2t where KT =
1
2ρΛcP,opt
( R
λopt
)3
(6.6)
Γref being the reference torque signal andKT the torque control gain. The gain algorithm is
derived from the non-adaptive case presented in (6.6)
Γref =
0, for ω < 0
ρΓ ∗ω2, for ω ≥ 0(6.7)
whereΓ ∗ incorporates all the non-adaptive gain (KT ) parameters apart from air densityρ that
is time-varying and thus uncontrollable. Most turbines have separate control mechanisms to
prevent reverse operation; in this study the control law (6.6) assumes positive regions ofω.
II. When the wind speed exceeds its nominal value, the control objective shifts from maximiz-
ing power capture to regulating power to the WECS’s rated output while reducing rotor speed
fluctuations and minimizing both control actuating loads and shaft torsional moments. Hence
in above rated wind regimes, both generator torque control and blade pitch control are used
for overload prevention and power limitation. The generator torque controller utilizes only the
local generator speed to produce appropriate control signals for meeting the control objectives.

CHAPTER 6. CONTROL PHILOSOPHY 73
Optimumcharacteristic
PI
P ref ω ref Γ g,ref
ω g
K + pt sKit
+_
Torque to currenttranslation
i rq,ref
+ _i rq
Rotorinjected voltage
u rqK + pv s
Kiv
Figure 6.7: Generator torque and speed control.
6.4.3.2 PI Controller for Γg,ref
The PI controller consists of a cascade speed and torque control-loop. The inner loop is the torque
control that compares the electric torque and the output signal from the speed proportional plus in-
tegral controller, shown in Fig. 6.7. The speed controller compares the actual rotor speed and the
reference rotor speed. The output signal from the cascade controllers is theq-axis rotor current.
I. Current Control
The stator current is regulated through control of the rotor current, and, by applying bothd- and
q-components, the reference values for the rotor current are calculated as
irq,ref =Us
XsXm− isq,ref · Xs
Xm. (6.8)
where the reference stator current is calculated with the reference values for torque,Γg,ref
isq,ref = Γg,ref · ω0
Us. (6.9)
The rotor currents are controlled with a PI controller, equipped with anti-windup and decoupling
terms to optimize the dynamic behavior [18].
II. Speed Control
The speed controller in Fig. 6.7 is a PI regulator that gives the relationship between the input,
∆ωg, and the output,Γg ,ref
Γg ,ref = Kpt∆ωg + Kit
∫ t
0
∆ωg dt (6.10)
where the proportional and integral constants areKpt = 500 Nms/rad andKit = 250 Nm/rad,
respectively. The output isΓg ,ref , that is used to defineisq,ref in (6.9). The reference generator
speed is a function of wind speed: below rated wind speed the reference generator speed is
proportional to the wind speed, above, it is constant at rated value.

CHAPTER 6. CONTROL PHILOSOPHY 74
6.4.3.3 Multiobjective Controllers for Γg,ref
Two significant problems abound with the standard control in (6.7):
1. inaccuracies in determiningΓ ∗ due to changing blade aerodynamics over time;
2. wind speed fluctuations force the WECS to operate off the peak of its power curve much of the
time, resulting in less energy capture.
Besides, control with PI (6.10) that optimizes energy can also cause undesirable torque fluctuations
that result from the inertia of the rotor as the torque control attempts to follow the wind. Indeed,
tracking ofTSR = λopt at high frequency is not desirable because it would induce sudden variations
of turbine rotational speed and thus high mechanical loads on the drive train. Moreover, the converter
in the variable speed turbine neither adds inherent damping to the power system, nor is its speed
inherently damped by the power system.
To address these issues, adaptive controllers are proposed that reduce the negative effects of both
the uncertainty regardingΓ ∗ and the change in optimal OP due to turbulence. These paradigms in-
clude: LQG, STR and MBPC, as detailed inChapters 7–9. These controllers seek the gain that
maximizes power capture regardless of whether this gain corresponds to the maximum of the power
curve for the WECS. Mechanical stress and strain reduction are met by reducing the vibrations be-
tween the rotating parts. The several multivariable, multiobjective schemes that are proposed generate
the appropriate generator torque signals respectively to compensate for the above contigencies as well
as add damping to the drive-train.
Although it may be possible to provide some damping mechanically, for example by means of
appropriately designed rubber mounts or couplings, there is a cost associated with this. Another
solution, which has been successfully adopted on many turbines, is to modify the generator torque
control to provide some damping. Instead of demanding a constant generator torque above rated, a
small ripple at the drive train frequency is added on, with its phase adjusted to counteract the effect
of the resonance and effectively increase the damping. A highpass or bandpass filter of the form
G2ζωs(1 + sτ)
s2 + 2ζωs + ω2(6.11)
acting on the measured generator speed can be used to generate this additional ripple. The frequency
ω must be close to the resonant frequency which is to be damped. The time constantτ can sometimes
be used to compensate for time lags in the system, or to adjust the phase of the response.

CHAPTER 6. CONTROL PHILOSOPHY 75
6.5 Conclusions
The overall objective of the controller is to maximize energy production, whilst working within actua-
tor operational limits and minimizing the extreme loads and associated fatigue damage on the turbine
structure and drive-train — a disturbance rejection task. Within this framework the designed con-
trollers have the following measurements available
(i) the instantaneous power,Pe = Γg · ωg, and
(ii) the generator speed,ωg.
The sensor dynamics can be assumed negligible, as is measurement noise. Note that the effective
wind speed,vw, cannot be measured. Additionally, the controllers are able to adjust these manipula-
ble variables:
(i) the blade pitch angle, and
(ii) the generator reaction torque.
In the case of grid faults the controllability of the WECS embraces both the control for preventing
rotor overspeed, and the control and protection of the power converter during and after the grid faults.
Several advanced controllers are proposed in the sequel whose commonality is full-state feedback
with state estimation and/or prediction. The greatest advantage of these paradigms over PID control
is the fact that they are multiobjective, hence can incorporate multiple inputs and multiple outputs.
Issues such as reducing shaft fatigue could be easily included in the control objectives. However, in
order to convince industry to shift toward more sophisticated controllers, it is necessary to compare
their functionality with PID controllers. Against the limitations of PID control, the aim is to establish,
through systematic design methods, that these elaborate controllers offer greater benefit in form of
robustness, efficiency, and eventual reduction in cost of energy.
Of the analyzed multiobjective, multivariable controllers, no scheme is clearly favored against the
others; the various paradigms are being tested and evaluated with respect to the classical PID con-
troller. The design and development of the various multiobjective control paradigms is undertaken in
the time domain, based on modeling the WECS components as discrete systems. Although the fre-
quency domain approach has the advantage that it provides for a very rapid analysis of wind turbine
loading, it suffers from the disadvantage that it cannot take account of system non-linearities associ-
ated, for example, with the rotor aerodynamics, structural dynamics and/or control system dynamics.
For this reason in particular, the frequency domain approach is generally not utilized as the basis of
final, detailed wind turbine design calculations. The method is, nevertheless, of some value in the
very early stages of wind turbine design for optimization studies.

CHAPTER 6. CONTROL PHILOSOPHY 76
References
[1] A. Tapia, G. Tapia, J. X. Ostolaza, and J. R. Saenz, “Modeling and control of a wind turbine
driven doubly fed induction generator,”IEEE Trans. Energy Conversion, vol. 18, no. 2, pp. 194-
204, 2003.
[2] B. Boukhezzar, L. Lupu, H. Siguerdidjane, and M. Hand, “Multivariable control strategy for
variable speed, variable pitch wind turbines,”Renewable Energy, vol. 32, pp. 1273-1287, 2007.
[3] S. R. Dominguez, and M. D. McCulloch, “Control method comparison of doubly fed wind gener-
ators connected to the grid by assymetric transmission lines,”IEEE Trans. Industry Applications,
vol. 36, no. 4, pp. 986-991, Jul/Aug. 2000. doi:10.1109/28.855951.
[4] R. Teodorescu, and F. Blaabjerg, “Flexible control of small wind turbines with grid failure detec-
tion operating in stand-alone and grid-connected mode,”IEEE Trans. Power Electronics, vol. 19,
no. 5, pp. 1323-1332, Sept. 2004. doi:10.1109/TPEL.2004.833452.
[5] R. Cardenas, and R. Pena, “Sensorless vector control of induction machines for variable-speed
wind energy applications,”IEEE Trans. Energy Conversion, vol. 19, no. 1, pp. 196-205, Mar. 2004.
doi:10.1109/TEC.2003.821863
[6] H. S. Ko, S. Bruey, J. Jatskevich, G. Dumont, and A. Moshref, “A PI control of DIFG-based wind
farm for voltage regulation at remote location,”IEEE Power Engineering Society General Meeting
2007, 24-28 June 2007, pp.1-6. doi:10.1109/PES.2007.385496.
[7] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, H. Kinjo, and T. Funabashi, “Gain scheduling
control of variable speed WTG under widely varying turbulence loading,”Renewable Energy, vol.
32, no. 14, pp. 2407-2423, 2007.
[8] W. E. Leithead, S. de La Salle, and O. Reardon, “Role and objectives of control of wind turbines,”
Proceedings of the IEEE, vol. 138C, pp. 135-148, 1991.
[9] P. Novak, T. Ekelund, I. Jovilk, and B. Schimidtbauer, “Modeling and control of variable speed
wind turbine drive systems dynamics,”IEEE Control Systems Magazine, vol. 15, no. 4, pp. 28-38,
1995.
[10] E. S. Abdin, and W. Xu, “Control design and dynamic performance analysis of a wind turbine-
induction generator unit,”IEEE Trans. Energy Conversion, vol. 15, no. 1, pp. 91-96, 2000.

CHAPTER 6. CONTROL PHILOSOPHY 77
[11] I. Munteanu, N. A. Cutululis, A. I. Bratcu, and E. Ceanga, “Optimization of variable speed wind
power systems based on a LQG approach,”Control Engineering Practice, vol. 13, pp. 903-912,
2005.
[12] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, and T. Funabashi, “Robust predictive control
of variable speed wind turbine generator by self-tuning regulator,”2007 IEEE Power Engineering
Society General Meeting, 24-28 June, 2007, pp. 1-8.doi:10.1109/PES.2007.385885.
[13] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Disturbance rejection by
dual pitch control and self-tuning regulator for wind turbine generator parametric uncertainty
compensation,”IET Procs. Control Theory and Applications, vol. 1, no. 5, pp. 1431-1440, 2007.
doi:10.1049/iet-cta:20060448.
[14] R. Sakamoto, T. Senjyu, T. Kinjo, N. Urasaki, and T. Funabashi, “Output power leveling
of wind turbine generator by pitch angle control using adaptive control method,”IEEE Int.
Conf. on Power Systems Technology, PowerCon 2004, 21-24 Nov. 2004, vol. 1, pp. 834-839.
doi:10.1109/ICPST.2004.1460109.
[15] M.-u.-D. Mufti, R. Balasubramanian, and S. C. Tripathy, “Self tuning control of wind-diesel
power systems,”Procs. of the 1996 Int. Conf. on Power Electronics, Drives and Energy Systems
for Industrial Growth, 8-11 Jan. 1996, vol. 1, pp. 258-264. doi:10.1109/PEDES.1996.539550.
[16] E. B. Muhando, T. Senjyu, and H. Kinjo, “Disturbance rejection by stochastic inequality con-
strained closed-loop model-based predictive control of MW-class wind generating system,”Procs.
Joint IEEJ-IEICE Conference, 19 Dec. 2007, pp. 91-99.
[17] E. Gallestey, A. Stothert, M. Antoine, and S. Morton, “Model predictive control and the opti-
mization of power plant load while considering lifetime consumption,”IEEE Trans. Power Sys-
tems, vol. 17, no. 1, pp. 186-191, Feb. 2002. doi:10.1109/59.982212.
[18] J. Soens, J. Driesen, and R. Belmans, “A comprehensive model of a doubly fed induction gen-
erator for dynamic simulations and power system studies,”Procs. Int. Conference on Renewable
Energies and Power Quality, ICREPQ ’03, Vigo, Spain, April 9–12, 2003.

Chapter 7
Full-State Feedback Digital Control by LQG
7.1 Introduction
Meeting the world’s growing demand for energy is a challenge that requires heavy investment in
power sources that minimize related impacts on the environment. Renewables, particularly wind
power, have an important part to play in widening the diversity of the energy mix. However, with high
wind penetration levels, the need for grid operators to quickly assess the impacts of the wind gener-
ation on system stability has become critical. With regard to power production, industry has been
shifting toward variable speed WECSs as they encounter lower mechanical stress, less power fluc-
tuations, and provide 10–15% higher energy output compared with constant speed operation [1],[2].
However, variable speed WECs present nonlinear dynamic behavior and lightly damped resonant
modes. When the frequency range of the disturbances matches one of the resonant modes, the life of
the turbine components is reduced, and the generated power quality is deteriorated [3].
A sophisticated control strategy incorporating a standard baseline controller and the LQG — a
multi-objective, full state feedback with state estimation scheme — for generator torque control is
proposed to meet the following objectives:
1. Ensure operation geared toward optimal power conversion
2. Ensure system reliability by enhancing reduction of stresses on the drive-train; achieved by
regulating large torque variations at the shaft to avoid damage to mechanical subsystems.
In the above rated wind speeds, the LQG’s main purpose is to add damping to the drive-train, thereby
minimizing cyclic fatigue, while a pitch control mechanism prevents rotor overspeed thus ensuring
the maximum power constraint is respected. However, the power generated may change rapidly
due to continuous fluctuation of wind speed and direction: the baseline controller tracks wind speed
variations with the target of optimizing aerodynamic efficiency during below rated wind speed events.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 79
The firt part of this chapter explores the LQG [4],[5] as a control scheme for WECS. The acronym
refers to Linear Quadratic Guassian — Linear systems with Quadratic performance criteria that in-
clude Gaussian white noise in the LQ paradigm. By including Gaussian white noise in the LQ
paradigm linear optimal feedback systems based on output feedback rather than state feedback may
be found. LQG design methods convert control system design problems to an optimization problem
with quadratic time-domain performance criteria. Disturbances and measurement noise are modeled
as stochastic processes. MIMO problems can be handled almost as easily as SISO problems. Several
studies have shown the efficacy of LQG in WECS control [6]-[10]. A practical implementation is
reported by Lescheret al. [11], where the LQG is incorporated in intelligent micro-sensors placed on
the wind turbine blades and tower to monitor fatigue loads during above rated wind speed operation.
The second part of this chapter proposes a hybrid control paradigm, as developed in [12],[13], to
ensure maximum power capture and regulation of shaft load variations via generator torque control.
The neurocontroller (NC) is introduced to work in tandem with the LQG since the turbine system is
dynamically nonlinear. The scheme takes advantage of the qualities of the NC, made up of an artificial
neural network (ANN). The basis for including the NC is influenced by two properties of ANNs:
1. Computational speed, and
2. Ability to learn and generalize even in cases where full information for the problem at hand
is absent [14].
With either control strategy, the main control objective is the regulation of turbine speed. Other
objectives include maintaining stable closed-loop behavior as well as enhancement of damping in
various flexible modes of the turbine. Overall, the designed control scheme should achieve a trade-off
between two contradictory demands:
• maximization of energy capture from the wind by operating at the optimum power coefficient
• alleviation of mechanical dynamical loads due to very lightly damped resonant modes of the
system [15].
The controller utilizes feedback from just one output variable, generator speed, to achieve stability,
performance, and robustness. State estimation is employed in modeling the unknown states to attain
full-state feedback, a process undertaken by a Kalman filter [16]-[18]. The WECS is dynamically
nonlinear; to aid in the design synthesis of the controllers and gain insight into approximate behavior
of the WECS, the system has to be linearized as explained inSection 2.3. Once this is established,
the generator torque line can be controlled by the LQG (or hybrid), and the generator loading of the
WECS made to follow the desired optimum shaft power locus.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 80
GeneratorTurbine rotor
J t
Jg
J1
J 2 Γ g
Γ t Γ 1
Γ 2
ω g
ω t ω 1
ω 2 D g
D t
K t
K g
K gr
ωJK
D
J t g
θ tg
ω t
g
N gr
e
(a) 3-inertia model (b) 2-inertia model
Figure 7.1: Dynamic drive-train equivalent system: rotating masses interlinked by a flexible shaft.
7.2 State Development for the Power-train
Fig. 7.1 illustrates the multimass model of the drive-train, simplified to a spring-mass-damper me-
chanical representation. The moments of inertia of the shafts and the gearbox wheels can be neglected
when assumed to be small compared with eitherJt or Jg. Thus there is justification for model reduc-
tion prior to realizing a simpler LQG controller design: the McMillan degree1 should be minimal
for practical implementation to avoid complex control laws. Further, external damping is assumed
negligible, and the moments of inertia of the shafts and the gearbox wheels can be neglected because
they are small compared with that of the wind turbine or generator. Therefore the resultant model is
essentially a two-mass system connected by a flexible shaft of equivalent stiffness and damping factor
(Fig. 7.1(b)). Only the gearbox ratio has influence on the new equivalent system.
Generally, the drive-train modifies the dynamics of the system because they include torsional
modes that relate to the aerodynamic rotor mass swinging with the induction generator mass through
the flexible transmission shaft. In the event that a strong gust is experienced, the system would be
subjected to an instantaneous speed change,∆ωt. The dynamics of the drive train are
Jtdωt
dt= Γt − Γd (7.1)
Jgdωg
dt= Γd − Γg . (7.2)
The low speed shaft torque,Γd , acts as braking torque on the rotor; it results from the torsion and
friction effects due to the difference betweenωt andωg and may be modelled to represent the torsional
moments that relate to the cyclic twist of the shaft during operation
Γd = Ke(θt − θg) + D
∫(ωt − ωg) (7.3)
1This is the model order, and refers to the dimension of the state vector.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 81
whereD represents the damping index andKe is the equivalent shaft compliance, given by
1
Ke=
1
Kt/N2gr
+1
Kg(7.4)
and further, from (7.3) and Fig. 7.1(b),
θtg = (θt − θg),dθt
dt= ωt, and
dθg
dt= ωg (7.5)
whereθt, θg are the angular positions of the shaft at the rotor and generator sides. In the analysis,Γd
is the torsional torque experienced by the flexible shaft that couples the two rotating inertias.
The linearized model locally valid around the OP may be developed on an equivalent mathematical
state-space representation of the form
x = Ai∆x + B∆u + Bwξ
y = Cx (7.6)
wherex ∈ N is a vector consisting of the system states,u ∈ M represents the command signals,
ξ(≡ mw) ∈ O is the disturbance input vector,A ∈ N×N is the system matrix while the inputs affect
the state dynamics through the control input gain distribution matrixB ∈ N×M , andBw ∈ N×O is
the disturbance input matrix. The output variabley ∈ P , which is the measured output (generator
speed), is constructed from the states and the inputs through matrixC ∈ P×N . Model orders are
defined inM, N, O, P. Note that friction of the shaft at the rotor and generator sides is implied in
D, since the elasticity and damping elements between the adjacent inertias correspond to the low- and
high-speed shaft elasticities and internal friction, respectively. The vectorx ∈ N in (7.6) consists of
the system states defined respectively as follows:
x1 is the perturbed turbine rotor speed,∆ωt
x2 is the perturbed generator speed,∆ωg
x3 is the perturbed shaft torsional torque,∆Γd
x4 is the perturbed actuator pitch rate,∆β, and
x5 is the wind disturbance over the rotor disk,∆vw.
The statesx1–x5 are obtained from (7.1), (7.2), (7.3), (6.1), and (5.5) respectively. For eacht ≥ 0 the
statex(t) and inputu(t) are dimensional vectors. The outputy(t) is the controlled output. The signal
ξ models the wind disturbances on the plant, and is a vector-valued Gaussian white noise process.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 82
Turbinedynamics
CorrectionCost function
J=x Px + u Qu
Optimal statefeedback
T T
State estimator
u(k)
x(k)x’(k)x(k-1)
u(k-1)
y’(k-1)
y(k-1)
Figure 7.2: Schematic of the proposed LQG controller with state estimator.
7.3 LQG Controller Design
7.3.1 State Estimation and LQG Design
Fig. 7.2 is a schematic of the proposed control paradigm. Unknown states are determined from just
one measured variable — generator speed. In the figure,y′ represents the predicted measurements
andx′ the predicted states. By estimating the aerodynamic torque,Γt, from vw, ωref andβ by the
relation in (2.17), the state estimator makes a one-step-ahead prediction of the states, and a correction
updates the state estimates, taking into account the prediction error. Thus
xk+1 = x′k+1 + M(y′
k − yk) (7.7)
where, assuming the stochastic disturbances acting on the system are Gaussian, the matrixM is
computed from the system dynamics and the disturbances, subject to minimization of the expected
sum of squares of the prediction error,(y ′k − yk).
The initial statex(0) is assumed to be a random vector. At any timet the entire past measurement
signaly(s), s ≤ t, is assumed to be available for feedback. The system states are generated using
the estimated aerodynamic torque,Γt in (2.17) with respective aerodynamic coefficientskω, kv, kβ in
(2.19)–(2.21). With generator speed being the only measurement,C = (0 1 0 0 0) in (7.6), thus the
state-space mathematical equivalent becomes
ωt
ωg
Γd
β
vw
=
kω
Jt0 − 1
Jt
kβ
Jt
kv
Jt
0 0 1Jg
0 0
Ke + Dkω
Jt−Ke −( D
Jt+ D
Jg) Dkβ
Jt
Dkv
Jt
0 0 0 − 1τβ
0
0 0 0 0 − 1τw
ωt
ωg
Γd
β
vw
+
0 0
− 1Jg
0Ke
Jg0
0 − 1τβ
0 0
[
Γg,ref
βcmd
]+
0
0
0
0
− 1τw
[
ξ
]

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 83
So, why the LQG?
Generally, control that optimizes energy by trackingλopt (as formulated in (6.6) and (6.7)) at high
frequency can be undesirable
a) torque fluctuations that result from the inertia of the rotor as the torque control attempts to
follow the wind would induce sudden variations of rotor speed and thus high mechanical loads
on the drive train
b) the converter in the variable speed turbine neither adds inherent damping to the power system,
nor is the turbine speed inherently damped by the power system.
To address these issues, the proposed LQG seeks the gain that maximizes power capture regardless of
whether this gain corresponds to the maximum of the power curve for the WECS. The LQG, designed
using the state-space model, takes into account stochastic properties of the system disturbances. The
problem of controlling the system is thestochastic linear regulator problem, and the target is to
control the WECS plant from any initial statex(0) such that the outputy(≡ ωg) is regulated to the
desired value as quickly as possible without making the inputu(≡ Γg,ref) unduly large. To this end,
the system is discretized and a performance indexJ introduced, with the following formulation:
J =
∫ ∞
0
E[xTQx(t) + uT(t)Ru(t)]dt ≈∞∑t=0
(x(t)TQx(t) + ΓT
g,ref(t)RΓg,ref(t))
(7.8)
whereQ andR are symmetric weighting matrices, that is,Q = QT andR = RT. The LQG is
synthesized for each linearization pointSi(xi; ui), composed by the state estimator for linear system
state vector estimation∆x′ = (x′ − xi) and by state feedback∆u′ = G∆x′. Static state feedbackG
is calculated in order to minimize the quadratic functionJ depending on control objectives, which
are dependent on operating zone:
I. when (vw ≤ vr), the system has to operate atλ = λopt to extract the maximum of energy
J =∞∑
t=0
(q1∆λ(t)2 + q2∆Γd (t)2 + r∆Γg,ref(t)
2)
(7.9)
where∆λ(t) = λ(t) − λopt and∆Γd (t) = Γd (t) − Γd ,i .
II. when (vw > vr), the produced electric power has to be regulated to its nominal value
J =
∞∑t=0
(q1∆Pe(t)
2 + q2∆Γd (t)2 + r1∆Γg,ref(t)2 + r2∆βcmd(t)
2). (7.10)

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 84
7.3.2 Choice of Weighting Matrices for LQG Cost Function, JOften it is adequate to let the two matrices simply be diagonal. The two terms,xT(t)Qx(t) and
ΓTg,ref(t)RΓg,ref(t), are quadratic forms in the components of the output,ωg, and the input signal,
Γg,ref , respectively. The first term in the integral criterion (7.8) measures the accumulated deviation
of the states from their references. The second term measures the accumulated amplitude of the
control input. It is most sensible to choose the weighting matricesQ andR such that the two terms
are nonnegative, that is, to takeQ andR nonnegative-definite2. If the matrices are diagonal then
this means that their diagonal entries should be nonnegative. The cost function,J , has no physical
significance; it provides a means to trade-off opposing objectives: state regulation versus control
usage.
The choice of the weighting matricesQ andR is a trade-off between control performance (Q
large) and low input energy (R large). Increasing bothQ andR by the same factor leaves the optimal
solution invariant. Thus, only relative values are relevant. TheQ andR parameters generally need to
be tuned until satisfactory behavior is obtained. An initial guess is to choose bothQ andR diagonal
[Q]
=
Q1 0 0 0 0
0 Q2 0 0 0
0 0 Q3 0 0
0 0 0 Q4 0
0 0 0 0 Q5
(7.11)
[R]
=
R1 0
0 R2
(7.12)
whereQ andR have positive diagonal entries such that
√Qi =
1
ymaxi
, i = 1, 2, · · ·, m ;√
Ri =1
umaxi
, i = 1, 2, · · ·, k (7.13)
where the numberymaxi denotes the maximally acceptable deviation value for theith component of
the outputy. The other quantityumaxi has a similar meaning for theith component of the inputu.
Starting with this initial guess the values of the diagonal entries ofQ andR may be adjusted by
systematic trial and error.
2An n × n symmetric matrixR is nonnegative-definite ifxTRx ≥ 0 for everyn-dimensional vectorx. R is positive-definite ifxTRx > 0 for all nonzerox.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 85
7.3.3 Solution of the Stochastic Linear Regulator Problem
The stochastic linear regulator problem consists of minimizingJ for the system in (7.6). For the case
when there is no state noise (ξ = 0) and the statex(t) may be directly and accurately accessed for
measurement, then forT → ∞ the performance index is minimized by the state feedback law
Γg,ref(t) = −Gx(t) (7.14)
with theG being thek × n state feedback gain matrix (k=1,n=5), given by
G = R−1BTX (7.15)
and the matrixX is the nonnegative-definite solution of the algebraic Riccati equation (ARE) [19],[20]
ATX + XA + DTQD − XBR−1BTX = 0. (7.16)
However, for the WECS under consideration, white noise disturbanceξ is present, but some of
the states cannot be accessed for measurement, but may be optimally estimated with the help of the
Kalman filter. Then the solution of the stochastic linear regulator problem with output feedback
(rather than state feedback) is to replace the statex(t) in the state feedback law (7.14) with the
estimated statex(t). Thus, the optimal controller is given by
˙x = Ax(t) + BΓg,ref(t) + K[ωg(t) − Cx(t)
]Γg,ref(t) = −Gx(t). (7.17)
The controller minimizes the steady-state mean square error
limT→∞E[ωT
g (t)Qωg(t) + ΓTg,ref(t)RΓg,ref(t)
](7.18)
under output feedback. The signalx is meant to be an estimate of the statex(t). It satisfies the
state differential equation of the system (7.6) with an additional input termK[ωg(t) − Cx
]on the
right-hand side.K is the observer gain matrix that needs to be suitably chosen. The observation error
ωg(t)−Cx(t) is the difference between the actual measured outputωg(t) and the outputωg(t) = Cx(t)
as reconstructed from the estimated statex(t). The extra input termK[ωg(t) − Cx(t)
]on the right-
hand side of (7.17) provides a correction that is active as soon as the observation error is nonzero.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 86
Observer
WECS Plant
Gain
ωΓ
x
_ gg,ref
Figure 7.3: Observer based feedback control.
Figure 7.3 shows the arrangement of the closed-loop system. Bycertainty equivalence(using the
estimated state as if it were the actual state), state estimation is divorced from control input selection,
which in effect is the separation principle. The closed-loop system that results from interconnecting
the plant (7.6) with the compensator (7.17) is stable, and may be recognized as follows. By connecting
the observer
˙x = Ax(t) + BΓg,ref(t) + K[ωg(t) − Cx(t)], t ∈ (7.19)
to the noisy system in (7.6), then differentiation ofe(t) = x(t) − x(t) leads to the error differential
equation
e(t) = (A − KC)e(t) − Bwξ(t), t ∈ . (7.20)
Substitution ofu(t) = −Gx(t) into x(t) = Ax(t)+Bu(t)+Bwξ(t) yields with the further substitution
x(t) = x(t) + e(t)
x = (A − BG)x(t) − BGe(t) + Bwξ(t). (7.21)
Together with (7.20) then x(t)
e(t)
=
A − BG −BG
0 A − KC
x(t)
e(t)
+
Bwξ(t)
−Bwξ(t)
(7.22)
The eigenvalues of this system are the eigenvalues of the closed-loop system. Inspection shows
that these eigenvalues consist of the eigenvalues ofA − BG (the regulator poles) together with the
eigenvalues ofA−KC (theobserver poles). If the plant (7.6) has ordern then the compensator also
has ordern. Hence, there are 2n closed-loop poles.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 87
LQG
NC
+
+
u LQ
u NC
Augmented system
GA
Drive-train damper
Drive-train dynamics
WECSaerodynamics
Wind speed model
Pitch controller β cmd
Γ g, ref
Γ t
ω g
DT loads
Other loads
Plant
X ref
Input layer, I
Hidden layer, H
Output layer, O
wi j
∆ω∆ω
∆ β
g
t
uNC
∆Γd
wj i
∆v w
l
j
i
(a) Simulation block diagram for the hybrid control scheme (b) Feedforward ANN architecture
Figure 7.4: Hybrid control scheme illustrating the augmented LQG with NC.
7.4 Hybrid Controller Design
The main goals of the control system are to control the power interchange within the WECS system,
and accommodating the fluctuations in wind speed for reliability, by controlling large torque varia-
tions at the shaft to avoid damage to mechanical subsystems. Instabilities would be obtained at high
wind speeds if the only controller utilized is a linear one. By introducing a hybrid control system
comprised by a LQG and a neurocontroller (NC) acting in tandem, the nonlinearities in the system
are handled by the latter. Fig. 7.4(a) shows the simulation block diagram. To ensure optimal operating
conditions, the hybrid controller effects minimization of errors between actual and reference states,
and outputs the generator torque command signal
Γg,ref = uLQ + uNC (7.23)
whereuLQ is the control contribution by the LQG anduNC is the NC control component. GA denotes
the genetic algorithm procedure that serves to train the NC.
7.4.1 NC Architecture
In its formulation, the NC is constructed from artificial neural network (ANN) units — a radial-basis
feedforward neural network whose hidden layer is nonlinear whereas the output layer is linear. A
relatively compact design having a 4:5:1 configuration is employed, and its architecture is shown in
Fig. 7.4(b). Definingui(k) andIIi (k) as input and output of theith input neuron at timek, H I
j (k)
as output of thejth neuron of the hidden layer at timek, OIl (k) as output of thelth neuron of the
output layer at timek, f(x) as the activation function, andw(1)ji , w
(2)j , w
(3)lj as the connection weights

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 88
from the input layer to the hidden layer, between hidden layers and from hidden layer to output layer
respectively, the structure of the 3-layered recurrent NN has the following mathematical description:
Input layer : IIi (K) = ui(K), i = 1, 2, ..., nI
I (7.24)
Hidden layer : HIj (k) = f
nII∑
i=1
w(1)ji ui(k) + w
(2)j HI
j (k − 1)
, j = 1, 2, ..., nIH (7.25)
Output layer : OIl (k) =
nIH∑
j=1
w(3)lj HI
j (k), l = 1, 2, ..., nIO (7.26)
First Layer
Consists of input nodes. Each neuron model receives 5 inputs:∆ωt, ∆ωg, ∆Γd, ∆β, and∆vw.
Associated with each input are scalar weightswi(i = 1, 2, ..., n) that multiply the inputs,xi.
Hidden layer
Composed of the kernel nodes whose effective range is determined by their center and width.
The argument of the activation function of each hidden unit computes the Euclidean distance
between the input vector and the center of that unit. The combined inputs from the first layer
are fed into an activation function of the second layer that produces the output,y, of the neuron:
y = k
(n∑
i=1
wixi + b
)(7.27)
wherek is a logistic logarithmic function with sigmoidal nonlinearity, defined by
fj(xj(n)) =a
1 + e−bxj(n), for −∞ < xj(n) < ∞, and b > 0 (7.28)
wherexj(n) is the weighted sum of all synaptic inputs of neuronj, fj is the output of the neu-
ron, with the gaina set to 1.0 andb = 1.0, both chosen by trial and error. Such an asymmetric
activation function typically learns faster [14], and is differentiable everywhere.
Third layer
Consists of the output node that simply computes the weighted sum of the hidden node outputs.
It is a linear mapping
un = φxi (7.29)
whereφ = 0.1 andx is the input vector.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 89
7.4.2 NC Training
Training of the NC by the GA is undertaken during preprocessing. The weight vectors along the
interconnection paths between layers are determined with an algorithm so that the signals are scaled
down to the range of [0,1]. The real-coded GA ensures fast training with good representational
accuracy, thereby yielding the desired input-output mapping. The evaluation function,E, of the
NC represents the mean square errors between the WECS output and the reference values
E =∑
i
Qi
(x(t) − x(t)
)2
(7.30)
where the factorQi = 1.0, chosen by trial and error, denotes the weight associated with the squared
error function and adjusts the importance of the control variables,x(t) is the actual output andx(t)
is the desired state variable. After the identifier neural network is trained, outputs of the nonlinear
system are same as those of the NN when the plant is controlled. Adjustment of the connection
weights for training the NN is as follows:
w(k + 1) = w(k) − η(k)∂EI(k)
∂w+ α∆w(k) (7.31)
EI(k) =1
2
nIO∑
l=1
(x1(k) − xl(k))2 (7.32)
∂EI(k)
∂w(3)lj
= −nI
O∑l=1
(xl(k) − xl(k))HIj (k) (7.33)
∂EI(k)
∂w(2)j
= −nI
O∑l=1
(xl(k) − xl(k))w(3)lj δj(k) (7.34)
∂EI(k)
∂w(1)ji
= −nI
O∑l=1
(xl(k) − xl(k))w(3)lj βji(k) (7.35)
(7.36)
wherew(k) and∆w(k) are connection weights and change of connection weights at timek respec-
tively, η andα are learning rate and momentum factor. Further,δj(0) = 0, andβji(0) = 0, where
δj(k) = f ′
nIl∑
i=1
w(1)ji ui(k) + w
(2)j HI
j (k − 1)
(HIj (k − 1) + w
(2)j δj(k − 1)) (7.37)
βji(k) = f ′
nIl∑
i=1
w(1)ji ui(k) + w
(2)j HI
j (k − 1)
(ui(k) + w(2)j βji(k − 1)). (7.38)

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 90
10
12
14
16
18
20
22
0 5 10 15 20 25 30 35 40v w
(t) [m
/s]
t [s]
(a) Simulated wind speed
0
0.5
1
1.5
2
0 5 10 15 20 25 30 35 40
Γ t [p
u]
t [s]
ΓtΓˆ
t
(b) Bold line shows the actual aerodynamic torqueΓ t while the dotted line represents the estimated valueΓt
Figure 7.5: Aerodynamic torque tracking with the proposed hybrid scheme.
7.5 Simulation Results
7.5.1 Tracking Performance by Proposed Technique
Fig. 7.5(a) shows a wind profile generated for a 42-second simulation. The prevailing mean wind
speed is 12.205 m/s under gusty conditions, with turbulence intensity of 19%. For the most part
vw > vr and the target for the LQG controller is to mitigate against torsional loading on the drive
train. Pitch control assures rated power.
The philosophy of LQG control is ability to estimate plant states so as to generate the command
signal necessary to compensate for parameter variations. This is the essence of turbine linearization
about an OP. Fig. 7.5(b) shows good tracking performance of the aerodynamic torque as estimated
by the Kalman filter. The apparent deviations from actual values may be explained as follows. The
controller is designed using one set of gains appropriate for a particular wind speed and blade pitch
angle. As the OP deviates from the design point of the WECS, the nonlinear aerodynamics of the
turbine cause the estimator to get less accurate. However, overall, the estimation ofΓt is achieved
with appreciably significant precision.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 91
10
12
14
16
18
20
22
0 5 10 15 20 25 30 35 40
v w(t)
[m/s
]
t [s]
(a) Simulated wind speed
0
5
10
15
20
25
0 5 10 15 20 25 30 35 40
TS
R, P
itch
angl
e
t [s]
λβ
(b) TSR (bold line) and pitch angle (dotted line)
0
0.1
0.2
0.3
0.4
0.5
0 5 10 15 20 25 30 35 40
c P
t [s]
(c) Coefficient of performance,cP (λ, β)
0
0.5
1
1.5
2
0 5 10 15 20 25 30 35 40
Pow
er, [
pu]
t [s]
IG real powerAerodynamic power
(d) IG real power (bold line) and aerodynamic power (dotted line) with the proposed method
Figure 7.6: Evolution of plant parameters for power conversion.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 92
10
12
14
16
18
20
22
0 5 10 15 20 25 30 35 40
v w(t)
[m/s
]
t [s](a) Simulated wind speed
0.96
0.98
1
1.02
1.04
1.06
1.08
1.1
0 5 10 15 20 25 30 35 40
Ve,
[pu]
t [s]
Proposed methodLQG
(b) Bold line showsVe with the proposed hybrid controller while dotted line representsV e with LQG
Figure 7.7: Variation in phase voltageVe with either controller for the 42 s simulation.
7.5.2 Optimization of Power Output
It is observed from Fig. 7.6 that wind turbulence considerably affects the evolution of the various
power parameters. With the progression of the wind speed beyond the rated value, power conversion
has to be checked to avoid damage to mechanical subsystems, by systematically decrementingcP .
From Fig. 7.6(b) it is seen that pitch angleβ rises in direct relation to the wind speed, since the
demanded pitch signal,βcmd, is large. This results in pitching the blades to regulate aerodynamic
conversion. Further, increase in wind speed results in a decrease in the TSR (λ ∝ 1/vw). Since both
the TSR andβ determine the value ofcP , the overall effect is that as wind speed increases, the power
coefficient is lowered appropriately, thereby limiting harvested aerodynamic power (Fig. 7.6(c)). The
IG real power is maintained at a steady output (rated) value in wind speed regimes beyond nominal,
as seen in Fig. 7.6(d), by the action of the pitch controller.
It is noteworthy that above nominal wind speed, an initial mean wind speed value has to be given
for the simulations since there is no unique relation between wind speed and generated power. This
relates to the initialization procedure for above rated wind speed analysis.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 93
10
12
14
16
18
20
22
0 5 10 15 20 25 30 35 40v w
(t) [m
/s]
t [s]
(a) Simulated wind speed
-1
-0.5
0
0.5
1
0 5 10 15 20 25 30 35 40
Γ g,c
md,
[pu]
t [s]
Proposed methodLQG
(b) Demanded generator torque command signal,Γ g,ref
-1.5
-1
-0.5
0
0.5
1
1.5
0 5 10 15 20 25 30 35 40
Γ d [p
u]
t [s]
Proposed methodLQG
(c) Drive-train torque,Γd.
Figure 7.8: Variation in torque parameters with either controller for the 42 s simulation. Bold anddotted lines represent quantities under the proposed hybrid controller and LQG, respectively.
The phase voltage response is shown in Fig. 7.7(b). Though both controllers achieve steadyVe
over the simulation period, it is seen that in instances whenvw < vr e.g. at 3.2 s from beginning of
simulation, the system is destabilized somewhat, and the LQG takes longer to regain stability (large
Ve fluctuations for longer). This is an instance of voltage recovery after a transient fault.
As a whole it is seen that the proposed hybrid controller can enhance voltage transient stability of
the wind turbine generator during high turbulence when wind fluctuations aroundvm are severe, and
maintain the output voltage and power at rated levels when wind speed is over the rated speed.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 94
7.5.3 Minimization of Shaft Torsional Torque
At high wind speeds the generator torque serves only to add damping to the drive train thus should
be maintained at a fairly constant value to ensure rated power output. Fig. 7.8(b) shows thatΓg,ref
is more steady with the proposed method relative to the LQG. This is attributable to the learning
and generalization-ability of the neural network in the NC system. By use ofΓg,ref both the speed
set-point and damping of excess aerodynamic torque are effected, alleviating undue loads on the
shaft. Fig. 7.8(c) depicts the torsional torque variations experienced by the flexible shaft, with either
controller. It can be seen that the objective of ensuring the drive train is cushioned from severe torque
fluctuations is attained more readily with the proposed hybrid controller.
7.6 Conclusion
The control objective aims torobustly stabilize the system while maintaining good disturbance atten-
uation and small tracking error despite actuator saturation. More specifically, the requirement is to
design a controller to trade-off minimizing the control usage due to the penalty thereof, defined in
the cost function, while also reducing the deviations from reference inputωg,ref i.e., tracking errore
(tracking performance). This involves disturbance attenuation to guarantee robust stability.
In this chapter a sophisticated control strategy is presented to compensate for the complicated ef-
fects of a stochastic operating environment and nonlinearities inherent in WECS dynamics that cause
parametric uncertainties. To meet the objectives, the approach involves designing an adaptive con-
troller and applying it to a performability model. The essence of the NC is to handle the nonlinearities
in the system and alleviate part of the control load on the LQG. Pitch control determines the power
coefficient, while the generator torque command is used to compensate for variations in parameters.
Influence of the torsional dynamics on the grid through delivered active power is eliminated by
using the generator torque command to achieve damping. The energy required to regulate these
variations is exchanged with the turbine hub rather than the grid. Comparisons are made between the
proposed controller and the LQG with regard to robustness to the evolution of plant parameters with
changing operating conditions. By utilizing either control scheme, a trade-off is imposed between the
contradictory objectives of maximizing energy capture from the wind and minimizing both the stress
on the mechanical parts of the WECS and power fluctuations in the grid. Though both the LQG and
the proposed hybrid controller show good conversion performance and robustness, simulation results
validate the effectiveness of the latter scheme in satisfying both objectives relative to the former.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 95
References
[1] Q. Wang, and L. Chang, “An intelligent maximum power extraction algorithm for inverter-based
variable speed wind turbine systems,”IEEE Trans. Power Electronics, vol. 19, no. 5, pp. 1242-
1249, 2004.
[2] K. Tan, and S. Islam, “Optimum control strategies in energy conversion of PMSG wind turbine
system without mechanical sensors,”IEEE Trans. Energy Conversion, vol. 19, no. 2, pp. 392-399,
June 2004.
[3] P. Novak, T. Ekelund, J. Jovik and B. Schmidtbauer, “Modeling and control of variable-speed
wind turbine drive system dynamics,”IEEE Control Systems Magazine, vol. 15, no. 4, pp. 28-38,
1995.
[4] J. M. Maciejowski,Multivariable Feedback Design, Reading, MA: Addison-Wesley Publishers
Limited, 1990.
[5] J. C. Doyle, and G. Stein, “Multivariable feedback design: concepts for a classical/modern syn-
thesis,”IEEE Trans. Automatic Control, vol. AC-26, pp. 4-16, Feb. 1981.
[6] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, H. Kinjo, and T. Funabashi, “Gain scheduling
control of variable speed WTG under widely varying turbulence loading,”Renewable Energy,
vol. 32, no. 14, pp. 2407-2423. 2007. doi:10.1016/j.renene.2006.12.011.
[7] A. Ben-Abdennour, K. Y. Lee, and R. M. Edwards, “Multivariable robust control of a power plant
generator,”IEEE Trans. Energy Conversion, vol. 8, no. 1, pp. 123-129, 1993.
[8] E. S. Abdin, and W. Xu, “Control design and dynamic performance analysis of a wind turbine
induction generator unit,”IEEE Trans. Energy Conversion, vol. 15, no. 1, pp. 91-96, 2000.
[9] C. Y. Kuo, C. L. Yang, and C. Margolin, “Optimal controller design for nonlinear systems,”IEE
Proc. Control Theory and Applications, vol. 145, no. 1, pp. 97-105, 1998.
[10] I. Munteanu, N. A. Cutululis, A. I. Bratcu, and E. Ceanga, “Optimization of variable speed wind
power systems based on a LQG approach,”Control Engineering Practice, vol. 13, pp. 903-912,
2005.
[11] F. Lescher, H. Camblong, R. Briand, and R. O. Curea, “Alleviation of wind turbines loads with
a LQG controller associated to intelligent micro sensors,”Presented at the IEEE International
Conference on Industrial Technology, 15-17 Dec. 2006. doi:10.1109/ICIT.2006.372245.

CHAPTER 7. FULL-STATE FEEDBACK DIGITAL CONTROL BY LQG 96
[12] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Regulation of WTG
dynamic response to parameter variations of analytic wind stochasticity,”Wind Energy,
doi:10.1002/we.236. 2007.
[13] E. B. Muhando, T. Senjyu, H. Kinjo, and T. Funabashi, “Augmented LQG controller
for enhancement of online dynamic performance for WTG system,”Renewable Energy,
doi:10.1016/j.renene.2007.12.001.
[14] S. Haykin, Neural Networks: A Comprehensive Foundation, 2nd ed. Prentice Hall, 1999.
ISBN:978-0132733502.
[15] T. Petru, and T. Thiringer, “Modeling of wind turbines for power system studies,”IEEE Trans.
Power Syst., vol. 17, no. 4, pp. 1132-1139, 2002.
[16] R. E. Kalman, “A new approach to linear filtering and prediction problems,”ASME Trans. Jour-
nal of Basic Engineering, vol. 82, pp. 35-45, 1960.
[17] Z. Xin-Fang, X. Da-Ping, and L. Yi-Bing, “Adaptive optimal fuzzy control for variable speed
pitch wind turbines,”5th World Congress on Intelligent Control and Automation, WCICA 2004,
15-19 June 2004, vol. 3, pp. 2481-2485. doi:10.1109/WCICA.2004.1342041.
[18] L. Shuhui, D. C. Wunsch, E. O’Hair, and M. G. Giesselmann, “Wind turbine power es-
timation by neural networks with Kalman filter training on a SIMD parallel machine,”Int.
Joint Conf. on Neural Networks, IJCNN ’99, 10-16 July 1999, vol. 5, pp. 3430-3434.
doi:10.1109/IJCNN.1999.836215.
[19] T. E. Duncan, L. Guo, and B. Pasik-Duncan, “Adaptive continuous-time linear quadratic
Gaussian control,”IEEE Trans. Automatic Control, vol. 44, no. 9, pp. 1653-1662, Sept.
1999.doi:10.1109/9788532.
[20] S. Boyd, and C. Barratt,Linear Controller Design: Limits of Performance, Prentice-Hall, 1991.
ISBN-13:978-0135386873.

Chapter 8
Predictive Control I: STR
8.1 Introduction
RENEWABLE energy systems that take advantage of energy sources that will not diminish over
time and are independent of fluctuations in price and availability are playing an ever-increasing
role in modern power systems. Low cost, plentiful, clean, and, in all other respects, “green” — these
words describe wind power in a nutshell. To ensure smooth integration of the wind power into the grid,
modern control techniques for WECS have become a prerequisite, often centred around various types
of self-tuning control. Such adaptive control interfaces include Minimum Variance Control (MVC)
[1]-[4], Generalized Minimum Variance (GMV) [3],[5]-[8], Pole Assignment (PA) [5],[9],[10], and
optimal predictors [11]. MVC generally gives very lively control and can be highly sensitive to
nonminimum phase plants. GMV, albeit more robust and generalized, is vulnerable to unknown or
varying plant dead time and can have difficulty with dc offsets. PA aims to locate the closed-loop
poles of the system at pre-specified locations leading to ‘smooth’ controllers, but the algorithm can
show numerical sensitivity when the plant model is overparameterized. In this Chapter a self-tuning
algorithm based on principles of Generalized Predictive Control (GPC) [12] has been selected.
One of the most commonly used and well studied adaptive controllers is the Self-tuning regulator
(STR) [13]–[15]. STRs consist of two parts: an estimator and a control law, which are usually invoked
at every sample period. The most commonly used estimator in STR is recursive least-squares (RLS)
[16],[17]. The purpose of this estimator is to dynamically estimate a model of the system relating the
measured metrics with the actuation. The control law will then, based on this model, set the actuators
such that the desired performance is achieved. The ability of the controller to achieve the performance
goals is explicitly tied to how well the model represents the system at that instant. Use of STR for the
adaptive control of WECSs has been shown to offer considerable promise [18]–[20].

CHAPTER 8. PREDICTIVE CONTROL I: STR 98
The development of a control system involves many tasks such as modeling, design of the control
law, implementation, and validation. The STR attempts to automate several of these tasks. In the
proposed paradigm, control is exercised through the STR that incorporates a recursive least squares
(RLS) algorithm to predict the process parameters and update the states. The STR design is carried
out as a nonlinear stochastic problem and is incorporated into the dynamical system, where the struc-
ture comes from tracking error. Variations in parameters are identified by a Kalman filter and their
influence is compensated by generating a control signal to minimize output error. A gradient-based
tuning algorithm guarantees the boundedness of all the closed-loop system signals. Motivation for the
choice of STR is attributable to advances in microcomputer technology that has made more sophis-
ticated algorithms feasible. The STR has been selected for control of generator torque of the WECS
for these practical reasons:
1) Capability: can control difficult systems such as wind turbines without special adjustments.
2) Multi-step prediction: control signal can be influenced by future system output bounds, giving
robustness.
3) Tuning knobs: enable customized performance and give flexibility.
4) Future target reference: adjustable setting to enhance control during scheduled changes.
5) Versatility: simple or complex controller structure as necessary.
The RLS is one of the most widely used estimation algorithms in adaptive controllers due to its
robustness against noise, and its proven convergence speed — factors elemental in effecting stability
of the whole control loop. In its implementation, on-line recursive parameter estimation is employed
to evaluate the time-varying or unknown parameters of a discrete time model of the WECS. Changes
in the system dynamics are slow and the estimator should be and is able to track parameter variations
well. Any concerns over the STR controller ranging too far can be met in the software by imposing
limits or ‘jacketing’ the control.
Below rated wind speeds, operation is executed on a trajectory that guarantees optimal energy
conversion, by reference tracking. To prevent large torque and power peaks during high wind speeds,
the turbine speed is regulated by the action of a pitch controller. In this case the output of the STR,
Γg,ref , is used to add damping to the drive train torsional modes. In performing generator torque
control, the scheme dictates the reference generator speed, which is a function of wind speed: below
rated wind speed the reference generator speed is proportional to the wind speed, above, it is constant
at rated value.

CHAPTER 8. PREDICTIVE CONTROL I: STR 99
Optimumcharacteristic
P ref ω ref Γ g,ref
ω g
+ _
Torque to currenttranslation
i rq,ref
+ _i rq
Rotorinjected voltage
u rqK + pv s
Kiv
PI
K + pt sKit
STR
Figure 8.1: Choice of STR or PI for generator torque control.
8.2 WECS Multi-objective Control Concept
To achieve rotor speed and current control, the rotor side converter operates in a stator-flux oriented
reference frame and executes control via the generator torque controller consisting of a cascade speed
and torque control-loop, as shown in Fig. 8.1. In the simulations, generator torque control command,
Γg ,ref , is generated by the STR controller. Its performance in meeting the objectives of optimizing
power conversion and alleviating power train loads is gauged against that of a PI set up in the same
fashion. The inner loop is the torque control that compares the electric torque and the output signal
from the speed controller. The speed controller compares the actual rotor speed and the reference
rotor speed. The output signal from the cascade controllers is theq-axis rotor current. Thed-,q-axis
rotor currents are transformed to 3-phase currents prior to being applied to the rotor side converter.
Current Control
The reference stator current is calculated from the reference torque,Γg,ref , and is regulated by
applying bothd- andq-components; the reference values for the rotor current are calculated as
irq,ref = Γg ,ref · ω0
Us
. (8.1)
Generator Torque Control
The output of the generator torque controller,Γg ,ref , is used in determining the current in (8.1).
This is accomplished by either control:
I. PI controller — the PI regulator in Fig. 8.1 gives the relationship between the input,∆ωg, and
the output,Γg ,ref
Γg ,ref = Kpt∆ωg + Kit
∫ t
0
∆ωg dt. (8.2)
where the proportional and integral gains areKpt = 500 Nms/rad, andKit = 250 Nm/rad.
II. STR — this is explained in Section 8.3.

CHAPTER 8. PREDICTIVE CONTROL I: STR 100
WGS plant
Optimal trackingcontroller design
RLS model Estimator
System response
Controllerparameters
Plant parameters, θ(k)Design specifications
Control signal
SELF-TUNING REGULATOR
Control law
ω (k) gΓ (k) g,refTarget/Reference setting
_+
Figure 8.2: Self-tuning regulator block diagram.
8.3 STR Design and Implementation
Fig. 8.1 shows the STR — a type of adaptive control system composed of two parts: an estimator
and a control law. These constitute two loops that are executed to yield a generator torque command
signal for stabilizing the WECS during operation under high turbulent inflow,viz.
• an outer loop composed of a recursive parameter estimator and design calculations that adjusts
the parameters of the controller, and
• an inner loop that consists of the WECS plant and an ordinary linear feedback controller.
An indirect adaptive algorithmis utilized for the overall execution of the WECS control in two steps:
1. estimate plant model parameters
2. update controller parameters as if estimates were correct (The Certainty Equivalence Principle)1.
Out of the several possible parameter estimation techniques, the RLS algorithm is selected to perform
the above tasks; additionally, of the several possible controller design methods, aLQ tracking optimal
controlusing state space models, is adopted.
For the STR control, LQ tracking optimal control design employs the RLS algorithm based on
an equivalent non-minimal state space realization of the WECS model as prior developed inPart I.
Simulations assume the complete dynamic model is set on an equivalent mathematical state-space
representation asx(k) = Ax(k) + Bu(k) + Bvw(k) andωg(k) = Cx(k). Note that the state vector
at timek is simply formed using past values of the input variables. No state observer is required.
In contrast, if minimal state space realizations are used, then a state observer is usually required.
Development and execution of the RLS algorithm and the control law are presented in Sections 8.3.1
and 8.3.2, respectively.
1The outcome of even an ideal measurement of a system is not deterministic, but instead is characterized by a prob-ability distribution, and the larger the associated standard deviation is, the more “uncertain” that characteristic is for thesystem — The Heisenberg Uncertainty Principle (HUP) in quantum physics.

CHAPTER 8. PREDICTIVE CONTROL I: STR 101
8.3.1 Outer Loop: Parameter Estimation
The following notation is used in Fig. 8.1 for the least-squares estimation:Γg,ref(k) is the vector of
theM th actuator setting during sampling intervalk, where
Γg,ref(k) = [Γg,ref1(k), Γg,ref2
(k) · ··, Γg,refN]T (8.3)
andωg(k) is the vector of the performance measurements of theN workloads, measured at the begin-
ning of intervalk
ωg(k) = [ωg,1(k), ωg,2(k), · · ·, ωg,M ]T . (8.4)
The relationship betweenωg(k) andΓg,ref can be described by the following MIMO model:
ωg(k) =N∑
i=1
Aiωg(k − 1) +N∑
i=1
BjΓg,ref(k − 1). (8.5)
Note thatAi ∈ N×N , Bj ∈ N×M , 0 < i ≤ n, 0 < j ≤ n, andn = 8 ∈ N is the order of the
model. This linear model is chosen for tractability since the relationship will indeed, in all but the
most trivial cases, be nonlinear. However, it is a good local approximation of the nonlinear function
and ample enough for the controller since it only makes small changes to the actuator settings. The
plant model (8.5) can be written explicitly as
ωg(k) = −a1ωg(k − 1) − a2ωg(k − 2) − · · · − anωg(k − n)
+ b0Γg,ref(k − d0) + · · · + Γg,ref(k − d0 − m). (8.6)
wherem = 8 ∈ N is a system model order andd0 = 1 is the dead time. For notational conve-
nience, the system model may take the following form, noting that this process is linear in the plant
parameters:
ωg(k) = ϕT(k − 1)θ(k − 1) (8.7)
where
ϕT(k − 1) =[− ωg(k − 1), · · ·, − ωg(k − n), Γg,ref(k − n), · · ·, Γg,ref(k − d0 − m)
]θT =
[a1, a2, · · ·, an, b0, · · ·, bm
]with ϕ(k) being theregression vectorandθ(k) theparameter matrix.

CHAPTER 8. PREDICTIVE CONTROL I: STR 102
The estimation block that utilizes the RLS algorithm is the heart of the STR. It recursively es-
timates the unknown process parameters for each measurement based on minimization of the least-
square error. The whole RLS algorithm involves the following matrix computations:
1) new dataωg(k) andϕ(k) are acquired, and the prediction error vector,ε(k), is computed from
the old estimated parameter
ε(k) = ωg(k) − ϕ(k)Tθ(k − 1) (8.8)
2) new parameterθ(k) is calculated
θ(k) = θ(k − 1) +ϕ(k)TP (k − 1)ε(k)
λ + ϕ(k)TP (k − 1)ϕ(k)(8.9)
3) data in the covariance matrix,P (k), is updated for the next sample
P (k) =P (k − 1)
λ− ϕ(k)TP (k − 1)ϕ(k)P (k − 1)
λ(1 + ϕ(k)TP (k − 1)ϕ(k)
) (8.10)
whereθ(k) = [a1, a2, · · ·, an, b0, · · ·, bm] is the estimated process parameter vector,ε(k) ∈ N×1 is the
error in predicting the signalωg(k) one step ahead based on the estimateθ(k), P (k) ∈ NMn×NMn is
the error covariance,k is an integer discrete time index, andλ is the forgetting factor:(0 < λ ≤ 1). A
high forgetting factor means that RLS remembers a lot of old data when it computes the new model.
Conversely, a low forgetting factor means that it largely ignores previous models and only focuses on
producing a model from the last few samples.
The intuition behind these equations is quite simple. (8.8) computes the error between the latest
performance measurements and the performance prediction (8.7) of the model. This is the RLS error,
ε(k). The model parameters are then adjusted in (8.9) according to the RLS error and another factor
dependent on the covariance matrixP computed in (8.10).P contains the covariances between all
the measurements and the actuators. The modelθ is then used by the control law described in the next
section to set the actuators correctly.
The RLS algorithm enables the adaptive filter to find the filter coefficients that relate to producing,
recursively, the least squares of the difference between the desired and actual signal. The benefits of
using the RLS algorithm is that there is no need to invert extremely large matrices, thereby saving
computation time, and that through it some intuition behind such results as the Kalman filter is gained.
Note that the recursion forP follows a Riccati equation and thus draws parallels to the Kalman filter.

CHAPTER 8. PREDICTIVE CONTROL I: STR 103
In practice, implementation of plain RLS algorithms may lead to numerical problems, and a fac-
torization of the covariance matrix should be considered to overcome this drawback. In calculating
the parameter estimates, the stability of the RLS method is improved by means of LD decomposition
(L = lower triangular matrix;D = diag(d1, ..., dn)), while adaptation is supported by directional for-
getting [21]. Since the task of recursive identification consists of searching for a parameter estimate
vectorθT(k) that minimizes the given criterion in (8.5), then the vector of the parameter estimates is
computed according to the square root version (LD decomposition) of the recursive relations
θ(k) = θ(k − 1) +P (k − 1)ϕ(k − 1)
1 + ζ(k − 1)ε(k − 1) (8.11)
whereζ is an auxiliary scalar in stepk such that
ζ(k − 1) = ϕT(k − 1)P (k − 1)ϕ(k − 1).
Case I: If ζ(k−1)>0, a rectangular covariance matrix is computed by the recurrent algorithm
P (k) = P (k − 1) − C(k − 1)ϕ(k − 1)ϕT(k − 1)P (k − 1)
δ−1(k − 1) + ζ(k − 1)(8.12)
where
δ(k − 1) = λ(k) − 1 − λ(k)
ζ(k − 1)
with the adaptive directional forgetting factor,λ(k), computed at each sampling period.
Case II: Whenζ(k − 1) = 0, then
P (k) = P (k − 1). (8.13)
The most complex situation is in the continuous-time domain since the straight differentiation of
data must be avoided. The approach entails descretizing the continuous system to enable sampling
and digital control analysis, thus thek th sampling (or at timekT ) represents a sample at the instant
t in the continuous system. Owing to the unified approach of the control synthesis, the same set of
control calculations can offer four types of control costs and two types of identified models. Each
self-tuner of a given structure has two main “knobs” — the first is for model option (RLS applied to
a regression (ARX) model), the second selects the performance criterion (LQ in this case).

CHAPTER 8. PREDICTIVE CONTROL I: STR 104
8.3.2 Inner Loop: Control Law, Γg,ref
The concept behind the RLS filter is to minimize a weighted least squares error function in the relation
between input and outputΓg,ref(k), ωg(k) for k = 1...N based on the prediction errorε(k); this
error function may be conceptualized as a performance index,PI(·)
PI(θ) =1
N
N∑k=1
|ε(k)|2 =1
N
N∑k=1
(ωg(k) − ϕT(k)θ
)2
. (8.14)
From (8.7), forθ0 = (a1, · · ·, an, b0, · · ·, bm)T then
PI(θ0) = 0, ∀ input, Γg,ref(k). (8.15)
To stay within the adaptive filter terminology, this performance index is theCost Function,J (k), that
evaluates the performance of the control unit, and the task of the recursive identification consists of
searching for a parameter estimate vectorθT(k) that minimizes the criterion
J (θ) = ωg(k)TQωg(k) +[Γg,ref(k) − WΓg,ref(k − 1)
]TR[Γg,ref(k) − WΓg,ref(k − 1)
](8.16)
whereQ is the weighting on the output, andR, W are the weights associated with the control signal.
To minimizeJ (θ) along all possible trajectories of the system, a trade-off between control perfor-
mance (Q large) and low input energy (R large) is desirable. The weight parameters are tuned until
satisfactory behavior is obtained. As an initial guess, the two terms are chosen to be nonnegative-
definite, and their values adjusted by systematic trial and error.
The proposed performance index also takes into account the prevention of excessive control. Due
to the fact that the cost function is square in the parameterθ, thenJ (θ) ≥ 0 with only one minimum.
BecauseJ (θ0) = 0, this minimum isθ = θ0. The implication is that for suitable excitation of the
system these parameters may be found by solution to the equations
∂
∂θJ (θ) = 0 (8.17)
with respect toθ. This defines the control law that governs the plant:
Γg,ref(k) = −[R+BT
i QBi
][BT
i Q
(∑i=1
NAiωg(k+1−i)+∑i=2
NBi(k+1−i)
)−RWΓg,ref(k−1)
].
(8.18)

CHAPTER 8. PREDICTIVE CONTROL I: STR 105
8 10 12 14 16 18 20 22
0 10 20 30 40 50 60
Win
d sp
eed,
Rot
or s
peed
Time, t [s]
Wind speed (m/s)Rotor speed (rpm)
(a) Nominal wind speed at hub position and rotor speed
9
10
11
12
13
14
15
0 10 20 30 40 50 60
Γ g,r
ef [
kNm
]
Time, t, [s]
(b) Demanded generator torque,Γg,ref
1.4 1.5 1.6 1.7 1.8 1.9
2 2.1 2.2
0 10 20 30 40 50 60
Pm [M
W]
Time, t, [s]
(c) Shaft mechanical power
Figure 8.3: Evolution of control and controlled parameters.
8.4 Simulation Analysis
8.4.1 Control for Energy Extraction
Fig. 8.3(a) shows the generated wind speed signal, as well as variation in rotor speed for the 1-minute
simulation. Fig. 8.3(b) demonstrates, as expected, how the demanded generator torque is kept very
nearly constant at above rated wind speeds so as to provide damping to the drive train. For above
rated wind speeds the turbine operates at full load and the output electric power has to be regulated at
nominal generator power. The inverter controller holds the electrical power constant, thus the turbine
is prevented from following thecP,opt trajectory and constrained to operate at lower values ofλ and
cP . The turbine rotational speed is maintained around nominal generator speed andβ is controlled in
order to reducecP (λ, β). Control is thus multivariable in this zone, because it acts on both generator
torque and pitch angle. It is observed from Fig. 8.3(c) that the mechanical power extracted from the
wind is successfully kept steady in cases of wind speeds above rated to guarantee the electric power
output is kept within the allowable±5% of the WECS’s rating.

CHAPTER 8. PREDICTIVE CONTROL I: STR 106
8
10
12
14
16
18
0 10 20 30 40 50 60
Win
d sp
eed,
vw [m
/s]
Time, t, [s]
(a) Nominal wind speed at hub position,vm=12.205 m/s
11.0012 11.0013 11.0014 11.0015 11.0016 11.0017 11.0018 11.0019
11.002
0 10 20 30 40 50 60
Vol
tage
[kV
]
Time, t, [s]
(b) Line voltage (rms)
70
80
90
100
110
120
0 10 20 30 40 50 60
Cur
rent
[A
]
Time, t, [s]
(c) WECS current
150
200
250
300
350
400
0 10 20 30 40 50 60
Rea
ctiv
e po
wer
, [V
Ar]
Time, t, [s]
(d) WECS reactive power
Figure 8.4: Electrical parameters.
With regard to network compliance, Figs. 8.4(b)–(d) depict variations in electrical parameters: the
grid voltage, current and reactive power, respectively. It is observed from Fig. 8.4(b) that the network
voltage is virtually undisturbed by variations in operating conditions. Fig. 8.4(c) shows variation in
the rotor current; for the current loop, the active power control is achieved by controlling theq-axis
component of the rotor current (in a stator fluxdq reference frame). The assumption that the dc
link voltage remains constant is valid if the dc link capacitor and converters are designed to enable
continued operation of the DOIG with low generator busbar voltages caused by close-up faults. The
available reactive power, shown in Fig. 8.4(d), depends on the active power. The fast-acting reactive
power control (applied through either converter) improves the stability of the generator.

CHAPTER 8. PREDICTIVE CONTROL I: STR 107
8
10
12
14
16
18
0 10 20 30 40 50 60
Win
d sp
eed,
vw [m
/s]
Time, t, [s]
(a) Nominal wind speed at hub position,vw
0.8
0.9
1
1.1
1.2
1.3
1.4
0 10 20 30 40 50 60
Γ t [M
Nm
]
Time, t, [s]
(b) Aerodynamic torque,Γt
0.8
0.9
1
1.1
1.2
1.3
1.4
0 10 20 30 40 50 60
Γ d [M
Nm
]
Time, t, [s]
(c) Low speed shaft torque,Γd
9
10
11
12
13
14
15
0 10 20 30 40 50 60
Γ g [k
Nm
]
Time, t, [s]
(d) Generator torque,Γg
Figure 8.5: Variation in various WECS torques.
8.4.2 Control for Load Alleviation
Figs. 8.5(b)–(d) show evolution of various torques during the 1-minute simulation. Fig. 8.5(b) gives
the corresponding aerodynamic torque developed by the turbine that is a function ofvw. Fig. 8.5(c)
depicts the low speed shaft torque,Γd, that acts as a braking torque on the rotor. It results from the
torsional and frictional effects due to the difference betweenωt andωg and is modelled to represent
the torsional moments that relate to the cyclic twist of the shaft during operation. It is seen that
at above rated wind speeds, severe shaft torsional moments that may cause mechanical stress and
strain are prevented by reducing vibrations between the rotating parts. The control is very effective in
maintaining generator torque control — it is observed from Fig. 8.5(d) that the generator torque does
not exceedΓg,max despite the turbulence that occassionally drives the wind speed above rated.

CHAPTER 8. PREDICTIVE CONTROL I: STR 108
8.5 Conclusion
The two core problems that face wind energy conversion systems today include grid integration issues
and reliability of the turbine structure, both attributable to the stochasticity of the wind. This study is
set against the background of need for modern digital controls to ensure optimum power conversion
in all operating ranges as well as alleviation of drive train loads that occur due to highly turbulent
wind environments that cause cyclic fatigue on the mechanical components.
A self-tuning regulator is proposed for the coordinated active power control and shaft torsional
moments reduction for a variable speed WECS that is incorporated into the grid. In implementing the
control topology, the considered constraints imposed on the control input signal are the rate, ampli-
tude and energy types. The control philosophy of the proposed paradigm relies on feedback, including
state estimation to approximate unmeasured plant states using the single turbine parameter,ωg, to sig-
nificantly enhance dynamic compensation and response of the closed loop system. For the nonlinear
WECS system, the fundamental concept of feedback is tremendously compelling as it enhances sta-
bility, improves the steady-state error characteristics, enables state estimation for unmodelled states,
and provides disturbance rejection due to a stochastic wind.
The appeal of the proposed STR is that the RLS algorithm is easy to implement and does not re-
quire massive processing power. Once designed, execution of the STR is reduced to a set of difference
equations connecting the measured outputs,ωg, to the new control signals,Γg,ref . The power of the
mathematical model lies in the fact that it can be simulated in hypothetical situations, be subject to
highly stochastic states due to large turbulence that would be dangerous in reality, and it can be used
as a basis for synthesizing controllers.
With regard to drive-train load mitigation capability, the STR performs well in attenuating drive-
train vibrational magnitudes at the rated wind speed. Effectiveness of the generator torque control
is gauged on capacity to improve damping for suppression of torsional vibration. Relative to the
classical PI controller, the STR control scheme shows considerable improvement in achieving the dual
objectives of maximization of energy capture and regulation of torsional dynamics under turbulent
wind conditions, and also guarantees that uncertainties in the WECS and wind models are explicitly
taken into account, resulting in a reduction in pitch activity.

CHAPTER 8. PREDICTIVE CONTROL I: STR 109
References
[1] T. Senjyu, R. Sakamoto, N. Urasaki, T. Funabashi, H. Fujita, and H. Sekine, “Output power
leveling of wind turbine generator for all operating regions by pitch angle control,”IEEE Trans.
Energy Conversion, vol. 21, no. 2, pp. 467-475, 2006. doi:10.1109/TEC.2006.874253.
[2] R. Sakamoto, T. Senjyu, T. Kinjo, N. Urasaki, and T. Funabashi, “Output power level-
ing of wind turbine generator by pitch angle control using adaptive control method,”Int.
Conf. on Power System Technology, PowerCon 2004, 21-24 Nov. 2004, vol. 1, pp. 834-839.
doi:10.1109/ICPST.2004.1460109.
[3] H. S. Ko, T. Niimura, and K. Y. Lee, “An intelligent controller for a remote wind-diesel power
system – design and dynamic performance analysis,”IEEE Power Engineering Society General
Meeting, 13-17 July 2003, vol. 4. doi:10.1109/PES.2003.1270948.
[4] F. Jurado, and J. R. Saenz, “Adaptive control for biomass-based diesel-wind system,”11th
IEEE Mediterranean Electrotechnical Conf., MELECON 2002, 7-9 May 2002, pp. 55-60.
doi:10.1109/MELECON.2002.1014529.
[5] G. Fusco, and M. Russo, “Generalized minimum variance implicit self-tuning nodal volt-
age regulation in power systems with pole-assignment technique,”9th IEEE Int. Conf.
on Control, Automation, Robotics and Vision, ICARCV ’06, 5-8 Dec 2006, pp. 1-6.
doi:10.1109/ICARCV.2006.345452.
[6] W. T. Chung, and A. K. David, “Digital and laboratory implementation of a generalized minimum
variance controller for an HVDC link,”IEE Procs. Generation, Transmission and Distribution, vol.
146, no. 2, pp. 181-185, Mar 1999. doi:10.1049/ip-gtd.19990039.
[7] W. Gu, and K. E. Bollinger, “A self-tuning power system stabilizer for wide range synchronous
generator operation,”IEEE Trans. Power Systems, vol. 4, no. 3, pp. 1191-1199, Aug. 1989.
doi:10.1109/59.32617.
[8] J. Y. Fan, T. H. Ortmeyer, and R. Mukundan, “Power system stability improvement with multi-
variable self-tuning control,”IEEE Trans. Power Systems, vol. 5, no. 1, pp. 227-234, Feb. 1990.
doi:10.1109/59.49110.
[9] H. Camblong, G. Tapia, and M. Rodriguez, “Robust digital control of a wind turbine for rated-
speed and variable-power operation regime,”IEE Procs. Control Theory and Applications, vol.
153, no. 1, pp. 81-91, Jan. 2006. doi:10.1049/ip-cta:20045190.

CHAPTER 8. PREDICTIVE CONTROL I: STR 110
[10] C. Woei-Luen, and H. Yuan-Yih, “Controller design for an induction generator driven by a
variable-speed wind turbine,”IEEE Trans. Energy Conversion, vol. 21, no. 3, pp. 625-635, Sept.
2006. doi:10.1109/TEC.2006.875478.
[11] A. Chandra, K. K. Wong, O. P. Malik, and G. S. Hope, “Implementation and test results of a
generalized self-tuning excitation controller,”IEEE Trans. Energy Conversion, vol. 6, no. 1, pp.
186-192, Mar 1991. doi:10.1109/60.73806.
[12] D. W. Clarke, C. Mohtadi, and P. S. Tuffs, “Generalized predictive control, the basic algorithm,
and extensions and interpretations,”Automatica, vol. 23, no. 2, pp. 137-160, 1987.
[13] K. J. Astrom, and B. Wittenmark,Adaptive Control. Electrical Engineering: Control Engineer-
ing, 2 ed., Reading, MA: Addison-Wesley, 1995. ISBN 0-201-55866-1.
[14] R. Bitmead, M. Gevers, and V. Wertz,Adaptive Optimal Control. The Thinking Man’s GPC,
Englewood Cliffs, NJ: Prentice-Hall, 1990.
[15] P. E. Welstead, and M. B. Zarrop,Self-Tuning Systems: Control and Signal Processing, Chich-
ester: Wiley, 1991.
[16] M. Honig, and D. Messerschmitt,Adaptive Filters: Structures, Algorithms, and Applications,
Hingham, MA: Kluwer Academic Publishers, 1984. ISBN0-898-38163-0.
[17] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Disturbance rejection by
dual pitch control and self-tuning regulator for wind turbine generator parametric uncertainty
compensation,”IET Procs. Control Theory and Applications, vol. 1, no. 5, pp. 1431-1440, 2007.
doi:10.1049/iet-cta:20060448.
[18] E. B. Muhando, T. Senjyu, N. Urasaki, A. Yona, and T. Funabashi, “Robust predictive control of
variable-speed wind turbine generator by self-tuning regulator,”IEEE Power Engineering Society
General Meeting, 24-28 June, 2007, pp. 1-8. doi:10.1109/PES.2007.385885.
[19] W. Ren, and P. R. Kumar, “Stochastic adaptive prediction and model reference control,”IEEE
Trans. Automatic Control, vol. AC-30, pp. 2047-2060, 1994.
[20] M.-u.-D. Mufti, R. Balasubramanian, and S. C. Tripathy, “Self tuning control of wind-diesel
power systems,”Procs. of the 1996 Int. Conf. on Powewr Electronics, Drives and Energy Systems
for Industrial Growth, 8-11 Jan. 1996, vol. 1, pp. 258-264. doi:10.1109/PEDES.1996.539550.
[21] R. Kulharvy, “Restricted exponential forgetting in real time identification,”Automatica, vol. 23,
no. 5, pp. 586-600, 1987.

Chapter 9
Predictive Control II: MBPC
9.1 Introduction
IF the Earth is choking on greenhouse gases, it is not hard to see why. Global carbon dioxide
output approached a staggering 32 billion tons in 2006. Turning off the carbon spigot is the
first step, and many of the solutions are familiar: windmills, solar panels, nuclear plants. All three
technologies are part of the energy mix, although each has its issues, including noise from windmills
and radioactive waste from nukes. Greenhouse-gas-induced global-warming worries are not the only
reasons to consider a power-grid shift to wind power. With fossil-fuel prices on the rise and their
supply increasingly unstable, the need for more environmentally benign electric power systems is a
critical part of the new thrust of engineering for sustainability. Wind turbines have become the most
cost-effective renewable energy systems available today and are now completely competitive with
essentially all conventional generation systems. Wind plants have benefited from steady advances
in technology, and much of the advance has been made in the components dealing with the utility
interface, the electrical machine, the power electronic converter, and the control capability [1].
However, the wind’s unpredictable nature forces utility operators to think differently about power
generation, and the main challenge is to provide governor functions and controlled ramp-down dur-
ing high wind speed events. Wind stochasticity results in fluctuations in output power as well as
undesirable dynamic loading of the drive-train during high turbulence. The only advanced control
methodology that has made a significant impact on industrial control engineering is Model Predictive
Control (MPC) [2]-[6]. The main reasons for this success in applications include:
• ability to handle multivariable control problems naturally,
• capacity to account for actuator limitations, and
• allows operation closer to constraints that frequently lead to more profitable operation.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 112
Model predictive control, in the form of Generalized Predictive Control (GPC), was first proposed
by Clarket al. [7],[8] and the properties of GPC are further presented for a set of continuous linear
systems [9] and nonlinear problems [10]. Several researchers have reported the potential of GPC for
WECS control [11]-[13]. Nonetheless, these references apply predictive control for energy extraction
maximization, but do not consider the cyclic loading impact on the drive train due to high turbulence.
This chapter develops the Model-Based Predictive Control (MBPC) strategy [14]-[17] for current
and speed control of the field oriented induction machine drive as well as regulation of drive train
shaft torsional moments reduction through generator torque control. The idea of MBPC is based on
computing a control function for the future time in order to force the controlled system response to
attain the reference value. An optimization process generates the control sequence, and the system
response is based on future control action, model parameters, and the actual system state. A criterion
to regulate the costing horizon of the MBPC is defined in the form of minimizing a quadratic cost
function. In its implementation, the plant is dynamically decoupled from the stiff grid frequency
since the mechanical dynamics are slower than the electrical ones. To execute the control, MBPC
requires an equivalent model defined in state space for online estimation and prediction of future
states, including disturbances. The proposed controller associates the predictive control action and
ensures the smooth transition of control from region to region.
MBPC provides a systematic procedure for dealing with constraints (both input and state) in
MIMO control problems, and is widely used in industry. Remarkable properties of the method in-
clude global asymptotic stability provided certain conditions are satisfied (e.g. appropriate weighting
on the final state). A remarkable property of MBPC is that stability of the resultant feedback system
(at least with full state information) can be established. This is made possible by the fact that the
value function of the optimal control problem acts as a Lyapunov function for the closed loop system.
The key elements in the design of the MBPC digital system for WECS control are:
• state space (or equivalent) model (developed inPart I),
• on-line state estimation (including disturbances),
• prediction of future states (including disturbances),
• implementation of first step of control sequence, and
• on-line optimization of future trajectory subject to constraints using Quadratic Programming.
Simulations are conducted using the MATLAB/Simulink software to validate the MBPC technique
vis-a-vis the classical PI controller. Computer simulations reveal that achieving the two objectives of
maximizing energy extraction and load reduction by the proposed control paradigm becomes more
attractive relative to the classical linear controller.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 113
Optimumcharacteristic
P ref ω ref
ω g
+
_
PI Pitchcontroller
MBPC
Above rated
Below rated
βcmd
Γref PI
Γref
Figure 9.1: Pitch regulated variable speed WECS speed control loops.
9.2 Control Concept for Power Regulation
Fig. 9.1 shows the overall control loops for the WECS. Control action to achieve both objectives of
conversion performance as well as drive-train load mitigation throughout the operating envelope is
undertaken by two controllers: generator torque control and pitch angle control, as follows:
• At low and moderate wind speeds, the rotor speed is controlled to maximize energy capture
by operating continuously at the TSR that results in the maximum power coefficient. This
is achieved by regulating the generator torque via the torque reference,Γg ,ref , given by the
proposed MBPC. The target is to track the trajectory withcP,opt.
• Whenvw > vr, the rotor collective pitch controller kicks in and generates a pitch signal,βcmd,
for adjusting blade pitch to regulatecP (λ, β), thereby ensuring rated power output:Pe = Pr.
In this region generator torque control serves only to add damping to the drive train.
The proposed control scheme first derivesPref throughout the operating region, and then the
corresponding generator torque control,Γg ,ref , and pitch command,βcmd, are computed to follow
the actual power along thePref trajectory. Such regional control aims to maintain the desired power
command,Pref , at various wind speeds in different wind regimes by the control expression
Pref =
P1 if P1 ≤ Pr & (vw < vc)
P2 if P2 ≤ Pr & (vc ≤ vw ≤ vr)
Pr if P1,2 > Pr & (vw > vr)
(9.1)
wherePr is rated power,vc, vr are cut-in and rated wind speeds,P1 is the maximum power command
calculated for the impressed wind speed in region 1 (safe operating region), andP2 is the optimum
power command in region 2 of operation, at which priority is given to power system stability rather
than to producing maximum wind energy conversion. Whenvw > vr, the target is rated power output.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 114
Objectives
@time=t k
Take process measurements
Constraints
WECS plant model =
Future plant outputs
Current & futureControl actionsDisturbances
@time=t k+1
Solve above optimization problem
Best current and future control actions
Implement best current control action
Figure 9.2: MBPC scheme.
9.3 Generator Torque Control
9.3.1 Γg,ref by MBPC
The flow-chart in Fig. 9.2 illustrates the concept of MBPC applied to the WECS model. It utilizes
a control algorithm founded on solving an online optimal control problem, with the objective of
determining the control function for the future time in order to constrain the WECS response to attain
the reference values, which are known. A receding horizon approach is used, which involves the
following control algorithm:
(i) At time k and for the current statesxi(k), solve, online, an open-loop control problem over
some future interval taking into account the current and future constraints.
(ii) Apply the first step in the optimal control sequence.
(iii) Repeat the procedure at time(k + 1) using the current states,xi(k + 1).
The solution is converted into a closed loop strategy by using the measured value ofxi(k) as the
current state. In this case only the generator speed is measurable; the rest of the states are obtained
by an observer (state estimation), and the closed loop policy is obtained by replacing the respective
states by the estimates.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 115
Prediction horizon Unpredicted future
k+N k
Measured past
x - past state x - actual future state
x - set-point
x - predicted state
_
Figure 9.3: Receding horizon control principle.
MBPC is based on iterative, finite horizon optimization of a plant model. At timek the current
plant state is sampled and a cost minimizing control strategy is computed (via a numerical minimiza-
tion algorithm) for a relatively short time horizon in the future:[k, k + N ]. Specifically, an online
calculation is used to explore state trajectories that emanate from the current state and find (via the
solution of Euler-Lagrange equations) a cost-minimizing control strategy until timek, k + N . Only
the first step of the control strategy is implemented, then the plant state is sampled again and the cal-
culations are repeated starting from the now current state, yielding a new control and new predicted
state path. The prediction horizon keeps being shifted forward and for this reason MPC is thus called
receding horizon control. Fig. 9.3 demonstrates the receding horizon control principle, where the
reference values are assumed to be a constant sequence while the system response is based on future
control action, model parameters, and the actual system state.
MBPC algorithms have a greater “prediction horizon”, characterized by an explicit model of the
controlled system, which can be identified separately. The model is used for precalculating the future
behavior of the controlled system as well as for the selection of optimal control values. With respect to
the wide prediction horizon MBPC algorithms need more calculation power relative to standard linear
controls. The calculation performance of microcontrollers, however, has been increasing steadily.
Although this approach is not optimal, in practice it has given very good results.
Fig. 9.4 defines the fundamental principles of the proposed control scheme. MBPC is a multivari-
able control algorithm that uses:
an internal dynamic model of the plant
a history of past control moves, and
an optimization cost functionJ over the prediction horizon, to calculate the optimum control
moves.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 116
+
_
Model
Model
Predictor
Optimizer
dJ(Γ ,w,...)
dΓ
Cost function
Constraints
w
ω (k-i k)
Γ (k-i k)
Forcedresponse
Totalresponse
Futurereference value
Future error
Freeresponse
WECS plantω (=y)g
Γ (=u)g,ref
g,ref
g,ref
ωg
g
g,ref
+
Figure 9.4: Structure of MBPC as applied to the WECS.
For a traditional MBPC formulation, consider a SISO plant with inputu(≡ Γg,ref), and output
y(≡ ωg). The MBPC online optimization problem is developed as follows. At timek find
minu[k|k],···,u[k+p−1|k]
p∑i=1
(y[k + i|k] − ySP
)+
m∑i=1
ri∆u[k + i − 1|k]2 (9.2)
subject to
umax ≥ u[k + i − 1|k] ≥ umin, i = 1, · · ·, m (9.3)
umax ≥ u[k + i − 1|k] ≥ − ∆umax, i = 1, · · ·, m (9.4)
ymax ≥ y[k + i − 1|k] ≥ ymin, i = 1, · · ·, p (9.5)
wherep andm < p are the lengths of the plant output prediction and manipulated plant input horizons
respectively, andu[k + i− 1|k], for i = 1, · · ·, p, is the set of future plant input values with respect to
which the optimization will be performed, where
u[k + i − 1|k] = u[k + m − 1|k], i = m, · · ·, p − 1 (9.6)
andySP is the set-point, while∆ is the backward difference operator,i.e.
∆u[k + i − 1|k] ≈ u[k + i − 1|k] − u[k + m − 2|k]. (9.7)
In typical MPC fashion, the above optimization problem is solved at timek, and the optimal input
u[k] = uopt[k|k] is applied to the plant. This procedure is repeated at subsequent timesk+1, k+2, etc.
It is clear that the above problem formulation necessitates the prediction of future outputsy[k + i|k].
This, in turn, makes necessary the use of a model for the plant and external disturbances. Assuming

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 117
the following finite-impulse-response (FIR) model describes the dynamics of the controlled plant:
y[k] =
n∑j=1
hiu[k − j] + d[k] (9.8)
wherehi are the model coefficients (convolution kernel) andd is the disturbance. Then
y[k + i|k] =n∑
j=1
hju[k + i − j|k] + d[k + i|k] (9.9)
where
u[k + i − j|k] = u[k + i − j], i − j < 0. (9.10)
The prediction of the future disturbanced[k + i|k] clearly can be neither certain nor exact. An ap-
proximation or simplification has to be employed, such as
d[k + i|k] = d[k|k] = y[k] −n∑
j=1
hju[k − j] (9.11)
wherey[k] is the measured value of the plant outputy at sampling pointk andu[k− j] are past values
of the process inputu. Substitution of (9.9) to (9.11) into (9.2) to (9.5) yields
minu[k|k],···,u[k+p−1|k]
p∑i=1
(n∑
j=1
hju[k + i− j|k]−n∑
j=1
hju[k− j]+ y[k]− ySP
)2
+m∑
i=1
ri∆u[k + i−1|k]2
(9.12)
subject to
umax ≥ u[k + i − 1|k] ≥ umin, i = 1, · · ·, m (9.13)
∆umax ≥ ∆u[k + i − 1|k] ≥ − ∆umax, i = 1, · · ·, m (9.14)
ymax ≥n∑
j=1
hju[k + i − j|k] −n∑
j=1
hju[k − j] + y[k] ≥ ymin, i = 1, · · ·, p (9.15)
The above optimization problem is a quadratic programming problem that can easily be solved at
each timek. The elaborate models developed for the drive train and electrical system inPart I are
appropriate to ensure the system behavior is calculable. For the WECS plant model,
x( + 1) = f(x(),Γg ,ref ()), x(k) = x (9.16)

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 118
the MBPC at event(x, k) is computed by solving the constrained optimal control problem:
PN (x) : V oN(x) = min
U∈uN
VN(x, U) (9.17)
whereU = Γg ,ref (k), Γg ,ref (k + 1), ..., Γg ,ref (k + N − 1) (9.18)
VN(x, U) =
k+N−1∑=k
L(x(),Γg ,ref ()
)+ F (x(k + N)) (9.19)
andUN is the set ofU that satisfy the constraints over the entire interval[k, k + N − 1], i.e.
Γg ,ref () ∈ U = k, k + 1, ..., k + N + 1 (9.20)
x() ∈ X = k, k + 1, ..., k + N (9.21)
together with the terminal constraint
x(k + N) ∈ W. (9.22)
Here,U ⊂ m is convex and compact,X ⊂ n is convex and closed, and the setW is appropriately
selected to achieve stability. With the constraint (9.17), the model and cost function are time invariant,
thus a time-invariant feedback control law is obtained by setting
U = Γg ,ref (0), Γg ,ref (1), ..., Γg ,ref (N − 1) (9.23)
VN(x, U) =N−1∑=0
L(x(),Γg ,ref ()
)+ F
(x(N)
)(9.24)
Uox = uo
x(0), uox(1), ..., uo
x(N − 1) (9.25)
then, the actual control applied at timek is the first element of this sequence,i.e.
u = uox(0) where u Γg ,ref . (9.26)
The predictive control law in (9.26) generates a control sequence that forces the future system re-sponse to be equal to the reference values. Expression (9.26) is a necessary condition for optimality:
Theorem 1 (Optimality Principle Bellman)For the above problem ifu(t) = uo(t), t ∈ [to, tf ] is
the optimal solution, thenuo(t) is also the optimal solution over the (sub)interval[to + ∆t, tf ], where
to < to + ∆t < tf .
Proof: See [18].
The essence is that any part of an optimal trajectory is necessarily optimal in its own right [19],[20].

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 119
Optimumcharacteristic
PI
P ref ω ref Γ g,ref
ω g
K + pt sKit
+_
Torque to currenttranslation
i rq,ref
Figure 9.5: Rotor speed and active power control by PI.
9.3.2 Γg,ref by PI
In the steady state the generator torque is set to be proportional toω2g , and thus the required generator
torque demand,Γg,ref , is obtained thus
Γg,ref = Koptω2g (9.27)
whereKopt is the optimal mode gain
Kopt = πρR5 cP (λ, β)
2λ3N3
gr . (9.28)
Thus below and around rated wind speeds, the variable speed WECS tries to stay at the desired
TSR wherever possible by tracking wind disturbances, achieved by using generator torque control
for regulating rotor speed in proportion to the wind speed. This maximizescP (λ, β) and hence the
aerodynamic power available. Note that in steady state conditions, energy output may not necessarily
be maximized by maximizing aerodynamic efficiency (tracking optimum TSR,λopt) since the energy
losses may also vary with the operating point (OP). It is therefore better to track a slightly different
TSR that yieldscP,opt(λ, β), by computingKopt.
The generator torque controller in Fig. 9.5 (shown as dotted block in Fig. 9.1) is a PI regulator that
gives the relationship between the input,∆ωg, and the output,Γg ,ref via the transfer functionC(s)
C(s) =Γg ,ref
∆ωg
= Kpt +Kit
s(9.29)
where the proportional and integral gains of the PI controller are respectively:Kpt = 500 Nms/rad,
andKit = 250 Nm/rad. PI tuning involves the long process of carefully adjusting the gains through
several simulations by trial and error in order to obtain minimum variations for the controlled vari-
ables. The reference generator speed is a function of wind speed: below rated wind speed it is
proportional to the wind speed, above, it is constant at rated value.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 120
8
10
12
14
16
18
20
0 20 40 60 80 100 120
Win
d sp
eed
[m/s
]
Time, t, [s]
(a) Simulated wind speed,vm = 12.205 m/s
-6
-4
-2
0
2
4
6
8
0 20 40 60 80 100 120$\be
ta$
[deg
], $\
dot\b
eta$
[deg
/s]
Time, t, [s]
Pitch anglePitch rate
(b) Variation in pitch angle control variables,βref andβ
1440
1460
1480
1500
1520
1540
1560
0 20 40 60 80 100 120
Gen
erat
or s
peed
[rpm
]
Time, t, [s]
(c) Generator rotor speed
1.2
1.4
1.6
1.8
2
2.2
0 20 40 60 80 100 120
Pow
er [M
W]
Time, t, [s]
Electrical PowerMechanical Power
(d) Aerodynamical power,Pm, and electrical power,Pe
Figure 9.6: Evolution of power parameters at rated speed (vr = 12.205 m/s).
9.4 Simulation Analysis
In the sequel the behavior of the output variables of the WECS systemi.e. active and reactive powers
injected into the utility grid, and low speed shaft torque variations, in response to variations of the
input variables, is presented. In executing the MBPC, gain-scheduling is carried out to compensate
for non-linearities of the WECS characteristics. The effectiveness of the paradigm is validated against
two criteria: comparison in performance with a classical PI controller, and manufacturer’s data that
has been tested in the field environment. The wind model provides a wind profile for the rated wind
speed of 12.205 m/s with prevailing turbulence of 16%, as shown in Fig. 9.6(a).

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 121
9.4.1 Aerodynamic Power Production
The proposed MBPC controller associates the predictive control action and ensures the smooth tran-
sition of control from region to region. In low to medium speed winds the controller regulates the
TSR for optimal power extraction. At above rated wind speeds, the predictive controller first derives
the desired power command, and the corresponding pitch command is computed to follow the actual
power along the trajectory of the desired power command.
9.4.1.1 Power Optimization Strategy (vw ≤ vr)
The energy capture is maximized by tracking the maximum power coefficient:
the power reference is the wind turbine available power;
the speed reference is the optimal speed.
The turbine has to produce the optimum power corresponding to the maximum tracking power point.
Thus the speed controller keeps the pitch angle constant to its optimal value, while the TSR is driven
to its optimal value by varying the rotational speed. Hence the demanded pitch angle command signal,
βcmd, is kept at –2 as seen in Fig. 9.6(b). The mechanical power,Pm, extracted from the wind and
the corresponding output electrical power,Pe, are shown in Fig. 9.6(d).
9.4.1.2 Power Limitation Strategy (vw > vr)
The controllers limitPe and speed to the rated values of the WECS, thus
the power reference is the rated power;
the speed reference is the rated speed.
The speed controller keeps the generator speed,ωg, limited to its rated value,ωr, by acting the pitch
angle —β is driven to positive values so as to keep the generator speed around the rated value of 1500
rpm, as shown in Fig. 9.6(c). During instances whenvw > vr, the WECS has to produce less than
it is capable of at a given wind speed. This action implies both a larger dynamical pitch activity and
a larger steady-state pitch angle of the wind turbine. This is observed in Fig. 9.6(b), around the 75th
to the 95th seconds of simulation. A reduction of the power conversion when the mean wind speed
is over rated speed implies an increase in the demanded pitch angle. Fig. 9.6(d) illustrates the steady
state power curves at high wind speeds for the 2 MW wind turbine. It is easily noticed that at any
given moment whenvw > vr, the deviation in power production from the optimum is satisfactorily
small,|Pe −Pr| < 5%. It is noteworthy that pitch rates are kept within±8/s, thereby lessening pitch
activity despite meeting control objectives (Fig. 9.6(b)), and thatωg is kept within±3% of rated rpm
of 1500 (Fig. 9.6(c)).

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 122
8
10
12
14
16
18
20
0 20 40 60 80 100 120
Win
d sp
eed
[m/s
]
Time, t, [s]
(a) Simulated wind speed atvm = 12.205 m/s
0.6 0.7 0.8 0.9
1 1.1 1.2 1.3 1.4 1.5
0 20 40 60 80 100 120
Aer
odyn
amic
torq
ue [M
Nm
]
Time, t, [s]
(b) Aerodynamic torque,Γt
8
9
10
11
12
13
14
15
0 20 40 60 80 100 120
Gen
erat
or to
rque
[kN
m]
Time, t, [s]
Γg,refΓg
(c) Generator torques,Γg,ref andΓg
0.7
0.8
0.9
1
1.1
1.2
1.3
0 20 40 60 80 100 120
Low
spe
ed s
haft
torq
ue [M
Nm
]
Time, t, [s]
(d) Variation in low-speed shaft torque,Γd
Figure 9.7: Development of torques during 120s simulation.
9.4.2 Drive-train Torque Variation Minimization
Fig. 9.7(a) shows the simulated turbulent wind speed at a mean of 12.205 m/s under a prevailing
turbulence intensity of 16%. Despite the high fluctuations in the generated aerodynamic torque as
shown in Fig. 9.7(b), MBPC yields a good tracking of the reference generator torque,Γg ,ref , as seen
in Fig. 9.7(c). More importantly, Fig. 9.7(d) confirms that variations in the drive-train torque,Γd , are
kept to a minimum to ensure undue cyclic loads are not experienced.
Essentially, by implementing the MBPC scheme, generator torque control and current control are
used to limit shaft moments thereby put in check the cyclic fatigue stresses that may ensue thereof.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 123
8
10
12
14
16
18
20
0 20 40 60 80 100 120
Win
d sp
eed
[m/s
]
Time, t, [s]
(a) Simulated wind speed atvm = 12.205 m/s
0.7
0.8
0.9
1
1.1
1.2
1.3
0 20 40 60 80 100 120
Driv
e tr
ain
torq
ue [M
Nm
]
Time, t, [s]
MBPCPID
(b) Drive train torque
70
80
90
100
110
120
0 20 40 60 80 100 120
Gen
erat
or p
ower
loss
[kW
]
Time, t, [s]
MBPCPID
(c) Generator power loss
Figure 9.8: Comparison of performance in power conversion and alleviation of drive train loads byMBPC (red line) and classical PID (green line).
9.4.3 Comparison: MBPC and Classical PID
The main objective of the generator torque controller in the above rated region is to enhance damping
in the first drive train torsional mode. This ensures a smooth transition when gusts are experienced,
to avoid exciting flexible turbine modes that increase dynamic loads. Fig. 9.8 serves to validate the
choice of the proposed MBPC when a comparison is made between the MBPC scheme and the PID
with regard to performance in meeting the objectives:
• During the two-minute simulation it is seen that the PID shows relatively higher fluctuations
in the drive train torque as opposed to the MBPC (Fig. 9.8(b)). This is attributable to the fact
that the PID is a linear controller and is unable to handle the nonlinear WECS dynamics fully,
especially in regions of high wind speeds.
• The generated power is compromised by using the PID. It can be observed from Fig. 9.8(c)
that the generator power loss is higher with the linear PID than the MBPC, especially at critical
instances(vw < vr), when the objective is energy conversion maximization.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 124
8
10
12
14
16
18
20
0 20 40 60 80 100 120
Win
d sp
eed
[m/s
]
Time, t, [s]
(a) Simulated wind speed atvm = 12.205 m/s
11.0012 11.0013 11.0014 11.0015 11.0016 11.0017 11.0018 11.0019 11.002
0 20 40 60 80 100 120
Vol
tage
[kV
]
Time, t, [s]
(b) Voltage at connection point (line, rms)
70
80
90
100
110
0 20 40 60 80 100 120
Cur
rent
[A]
Time, t, [s]
(c) Current
150
200
250
300
350
400
0 20 40 60 80 100 120
Rea
ctiv
e po
wer
[VA
r]
Time, t, [s]
(d) Reactive power
Figure 9.9: Variation in electrical parameters.
9.4.4 Evolution of Electrical Parameters
Figs. 9.9(b)–(d) show, respectively, the stator voltage, current, and reactive power for simulation at
the mean wind speed of 12.205 m/s. The power controller ensures the power reference by acting on
the current reference of the rotor current controller and thus on the generator current/torque. This
is achieved via two control loops: one for the active power control and the other for reactive power
control. The active power control is achieved by controlling theq-axis component of the rotor current
(in a stator fluxdq reference frame), while the reactive power control is achieved by controlling the
d-axis component of the rotor current (the magnetizing current) collinear with the stator flux. The
rotor current controller generates rotor voltage components as control variables of the converter.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 125
9.5 Conclusion
MBPC is a powerful methodology for solving challenging control problems, particularly the ones
where prescribed point-wise-in-time input and/or state constraints have to be satisfied. It relies on a
feedback-control methodology suitable to enforce efficiently hard constraints on the variables of the
controlled WECS system. It is shown that the method hinges upon a constrained open-loop optimal
control problem along with the adoption of the so-called receding-horizon control strategy. Being
a predictive control paradigm based on iterative, finite horizon optimization whose key elements
include a state space (or equivalent) model and online state estimation and prediction of future states
(including disturbances), MBPC is utilized successfully in meeting the control objectives of energy
maximization as well as regulation of drive-train torsional moments.
The control sequence is computed by solving online, over a finite control horizon, an open-loop
optimal control problem, given the WECS plant dynamical model and current state. Though this com-
putation relies upon an open-loop control problem, MBPC yields a feedback-control action. Indeed,
in a discrete-time setting only the first control of the open-loop control sequence is applied to the
plant, and, according to the receding horizon control policy, the whole optimization cycle is repeated
at the subsequent time-instant based on the new plant-state. Because it involves a control horizon
made up by only a finite number of time-steps, MBPC can be often calculated online by existing
optimization routines so as to minimize a performance index in the presence of hard constraints on
the time evolutions of input and/or state.
MBPC’s ability of handling constraints is of paramount importance whenever constraints are part
of the control design specifications. In fact, constraints are typically present in WECS dynamics, as
they stem from actuators’ saturations and/or physical, safety or economical requirements. The main
reason for the interest of control engineers in MBPC is therefore its ability to systematically and
effectively handle hard constraints.
The nonlinear WECS model may be linearized to derive a Kalman filter or specify a model for
linear MBPC. The time derivatives may be set to zero (steady state) for applications of real-time opti-
mization or data reconciliation. Alternatively, the nonlinear model may be used directly in nonlinear
MBPC and nonlinear estimation (e.g. moving horizon estimation). Though MBPC has been applied
effectively in the chemical and process industries, there is great potential for its integration in the
control modules of modern wind turbines.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 126
References
[1] J. C. Smith, “Winds of Change: Issues in utility wind integration,”IEEE Power & Energy
Magazine, vol. 3, no. 6, pp. 20-25, Nov-Dec. 2005.
[2] J. M. Maciejowski,Predictive Control with Constraints, Harlow, England: Prentice Hall, 2002.
[3] D. Q. Mayne, and H. Michalska, “Receding horizon control of nonlinear systems,”IEEE Trans.
Automatic Control, vol. 35, pp. 631-643, 1990.
[4] C. E. Garcia, D. M. Prett, and M. Morari, “Model predictive control: theory and practice –a
survey,”Automatica, vol. 25, pp. 335-348, 1989.
[5] W. H. Kwon, A. M. Bruckstein, and T. Kailath, “Stabilizing state feedback design via the
moving horizon method,”Int. Journal of Control, vol. 37, pp. 631-643, 1983.
[6] J. Qin, and T. Badgwell, “An overview of industrial model predictive control technology,”5th
Int. Conf. on Chemical Process Control, AIChE Symposium Series, J. C. Kantor, C. E. Garcia,
and B. Carnahan (Editors), vol. 93, pp. 232-256, 1997.
[7] D. W. Clark, C. Mohtadi, and P. S.Tuffs, “Generalized predictive control I: the basic algorithm”,
Automatica, vol. 23, no. 2, pp. 137-148, 1987.
[8] ——, “Generalized predictive control II: extensions and interpretations”,Automatica, vol. 23,
no. 2, pp. 149-160, 1987.
[9] A. W. Pike, M. J. Grimble, M. A. Johnson, A. W. Ordys, and S. Shakoor, “Predictive control,”
Chapter 51, pp. 805-814 inThe Control Handbook, W. S. Levine (ed.), CRC and IEEE Press,
1996.
[10] J. B. Rawlings, “Tutorial overview of model predictive control,”IEEE Control Systems Maga-
zine, pp. 35-52, June 2000.
[11] L. Lavoie, and P. Lautier, “Nonlinear predictive power controller with constraint for a wind
turbine system,”IEEE Int. Symposium on Industrial Electronics, 9-13 July 2006, vol. 1, pp.
124-129.
[12] T. Senjyu, R. Sakamoto, N. Urasaki, T. Funabashi, H. Fujita, and H. Sekine, “Output power
leveling of wind turbine generator for all operating regions by pitch angle control,”IEEE Trans.
Energy Conversion, vol. 21, no. 2, pp. 467-475, June 2006.

CHAPTER 9. PREDICTIVE CONTROL II: MBPC 127
[13] X. Zhang, D. Xu, and Y. Liu, “Predictive functional control of a doubly fed induction gen-
erator for variable speed wind turbines,”Proc. IEEE-WCICA 2004 Fifth World Congress on
Intelligent Control and Automation, 15-19 June 2004, vol. 4, pp. 3315-3319.
[14] E. B. Muhando, T. Senjyu, and H. Kinjo, “Disturbance rejection by stochastic inequality con-
strained closed-loop model-based predictive control of MW-class wind generating system,”
Proceedings of the Joint IEEJ-IEICE Conference, 19 Dec. 2007, pp. 91-99.
[15] E. Camponogara, D. Jia, B. H. Krogh, and S. Talukdar, “Distributed model predictive control,”
IEEE Control Systems Magazine, vol. 22, no. 1, pp. 44-52, Feb. 2002. doi:10.1109/37.980246.
[16] E. Gallestey, A. Stothert, M. Antoine, and S. Morton, “Model predictive control and the op-
timization of power plant load while considering lifetime consumption,”IEEE Trans. Power
Systems, vol. 17, no. 1, pp. 186-191, Feb. 2002. doi:10.1109/59.982212.
[17] M. Larsson, and D. Karlsson, “Coordinated system protection scheme against voltage collapse
using heuristic search and predictive control,”IEEE Trans. Power Systems, vol. 18, no. 3, pp.
1001-1006, Aug. 2003. doi:10.1109/TPWRS.2003.814852.
[18] R. Bellman, “On the theory of dynamic programming,”Proc. National Academy of Sciences of
the United States of America, vol. 38, pp. 716-719, 1952.
[19] C. D. Johnson, “Beyond Bellman’s principle of optimality: the principle of ‘real-time opti-
mality’ RTO,” Proc. 37th Southeastern Symposium on System Theory, SSST’05, 20-22 March,
2005. pp. 326-335, DOI: 10.1109/SSST.2005.1460931.
[20] M. Sniedovich, “A new look at Bellman’s principle of optimality,”Journal of Optimization
Theory and Applications, vol. 49, no. 1, pp. 161-176, 1986. DOI: 10.1007/BF00939252.

Chapter 10
Analysis, Perspectives, and Conclusions
10.1 Preamble
THE debate on whether climate change is real is virtually over — the facts are in: the Earth
is heating up. Building on action taken by signatories of the Kyoto Protocol1, the Intergov-
ernmental Panel on Climate Change (IPCC) estimates that this century, global temperatures will rise
between 1.8C and 4C, while some predictions for the next century are sobering, projecting this
figure to as much as 6.4C. Evidence of climate change is already here. A warmer and less stable
climate has potential for massive ecological and economic challenges. Unpredictable weather and
natural disasters — drought, floods, hurricanes and heat waves — are becoming more common. The
year 2007’s World Environment Day highlighted the consequences of the melting of the polar ice
caps, in an attempt to give a human face to environmental degradation. Commitment to the Kyoto
Protocol by some of the greatest GHGs emitters has been lukewarm. The US is a party to the UN
Framework Convention on Climate Change, whose Kyoto Protocol — a European Union-led effort
to reduce greenhouse gas emissions, primarily carbon dioxide associated with global warming — has
been reluctant to ratify the Kyoto Protocol, becauseit would unfairly hurt the American economy2.
The stalemate notwithstanding, most countries have turned to renewables to meet electricity de-
1According to a press release from the United Nations Environment Programme: “The Kyoto Protocol is an agreementunder which industrialized countries will reduce their collective emissions of greenhouse gases by 5.2% compared to theyear 1990” (but note that, compared to the emissions levels that would be expected by 2010 without the Protocol, thislimitation represents a 29% cut). The goal is to lower overall emissions of six greenhouse gases - carbon dioxide, methane,nitrous oxide, sulfur hexafluoride, hydrofluorocarbons, and perfluorocarbons - averaged over the period of 2008-2012.National limitations range from 8% reductions for the European Union and some others to 7% for the US, 6% for Japan,0% for Russia, and permitted increases of 8% for Australia and 10% for Iceland.
2An independent analysis showed that compliance with Kyoto would dramatically increase energy costs, substantiallyreduce GDP growth and force energy-intensive industries overseas, taking with them 4 million jobs. As a result, Kyotowould lead to an increase in associated emissions in countries without obligations under the treaty, such as China and In-dia, and therefore produce no real environmental benefit.Remarks atributed to Mr Michael Ranneberger, US ambassadorin Nairobi, and reported in the Kenyan newspaper,Daily Nation, of 26 May 2007.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 129
mand, and wind power is among the preferred sources of ‘green’ energy. Strong growth figures prove
that wind is now a mainstream option for new power generation. Wherever the wind speed exceeds
approximately 6 m/s there are possibilities for exploiting it economically, depending on the costs of
competing power sources. Numerous utility studies have shown that a unit of wind energy saves a
unit of energy generated from coal, gas or oil — depending on the utility’s plant — thereby saving
emissions of greenhouse gases, pollutants and waste products. The exact amount of emissions saved
depends on which fossil plants are displaced by wind energy.
Energy has since been established as a fundamental ingredient of socio-economic development
and economic growth. Renewable energy sources like wind energy are indigenous and can help in
reducing the dependency on fossil fuels. It has been estimated that roughly 10 million MW of energy
are continuously available in the earth’s wind. Wind energy provides a variable and environmental
friendly option and national energy security at a time when decreasing global reserves of fossil fuels
threatens the long-term sustainability of the global economy. The contribution of wind energy in
the global energy mix has been steadily increasing, thanks in part to remarkable advances in the
wind power design that has been achieved due to modern technological developments. The wind
turbine technology has evolved into a unique technical identity to meet unique demands in terms of
the methods used for design.
Growth in size and the optimization of WECSs has enabled wind energy to become increasingly
competitive with conventional energy sources. However, these developments raise a number of chal-
lenges. The penetration of wind energy in the grid raises questions about the compatibility of the wind
turbine power production with the grid. In particular, the contribution to grid stability, power quality
and behavior during fault situations plays therefore as important a role as the reliability. Regarding
installation and O&M costs, it is claimed that a wind turbine used for electricity generation will repay
the energy used in its manufacture within 6–9 months of its operation. Further, a modern wind turbine
operates for about 13 years in a design life of 20 and is almost always unattended. Development of
advanced power electronic components is integral to providing industry with the support it needs to
develop technologies capable of cost-effective operation.
It is against this backdrop that the research presented in this thesis explores advanced schemes for
control of wind power plants with regard to:
1. optimized power output, and
2. reliability assurance.
The methodology entailed modeling the various subsystems to derive mathematical state-space rep-
resentations for multiobjective controller design.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 130
10.2 Modeling: an Overview
I. Wind Speed Model for Simulations
Being the stock-in-trade for the WECS, real-time wind speed has been simulated by a reliable CSS
method, taking into consideration the annual average as well as the turbulence spectrum. The mean
wind speed is obtained from an annual Rayleigh probability density curve and the turbulence compo-
nent modelled as an instantaneous variation.
The problem is complicated and further work will undoubtedly be required before it will be pos-
sible to formulate reliable guidelines to assist the wind turbine designer. Turbulence models of the
form described above are now widely used for the calculation of fatigue loads for design purposes.
For calculation of extreme loads, however, it is standard practice to base calculations on deterministic
descriptions of extreme wind conditions. Current design standards and certification rules specify ex-
treme events in terms of discrete gusts, wind direction changes and wind shear transients. The form,
amplitude and time period specified for these discrete events remain rather arbitrary and largely unval-
idated. The development of more reliable methods for the evaluation of extreme design loads, based
possibly on the use of probabilistic analysis, requires considerable effort but is crucially important in
the context of refining wind turbine design analysis.
II. Drive-train Model
With larger or more flexible wind turbine structures, other issues of concern during variable-speed
operation are drive train dynamics and avoiding operation at system resonant frequencies. More-
over, system losses must be dealt with. These can be incorporated with modification to the control
methodology. Blade pitch can also be used to improve energy capture when the turbine is operating
at large errors in power output. The improvement in energy capture from these methods depends on
the turbine and operating environment.
However, use of variable-speed control increases the fluctuation of output power and somewhat
increases the shaft fatigue cycles. These issues must be weighed against the increase in power output
obtained from use. Drive train dynamics, system losses, and avoiding resonant frequencies can be
incorporated using proper control system implementation, by modifying the reference value for the
aerodynamic torque near the resonant rotor speed. The proposed control schemes (LQG, LQG/NC,
STR, and MBPC) consistently show lower fluctuations in shaft torsional torque when compared with
the classical PI(D). These advanced paradigms are a better alternative for the wind turbine industry.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 131
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1
Pha
se V
olta
ge,
[pu]
t, [s]
(a) Phase voltage
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1
Pha
se c
urre
nt,
[pu]
t, [s]
(b) Phase current
1.06 1.07 1.08 1.09 1.1
1.11 1.12 1.13 1.14 1.15 1.16
0 0.2 0.4 0.6 0.8 1
Spe
ed,
[pu]
t, [s]
(c) Rotor speed
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
Pow
er,
[pu]
t, [s]
(d) Power output
Figure 10.1: DOIG single phase fault: results of the WECS system.
III. DOIG Model: Fault Current Contribution and Post-Fault Behavior
Fig. 10.1 shows the DOIG response to a single phase fault introduced att = 0 s. The stator current,
speed and power output during the fault and after the fault is cleared is shown in Figs. 10.1(b)–(d).
The crowbar is designed to be triggered by the high rotor current when the fault is cleared. However,
normal operation of the machine is maintained once the fault clears, as seen in Fig. 10.1(b). All
the parameters (phase current, rotor speed and power) stabilize within ample time, meaning that the
power grid will still maintain transient voltage stability, attesting to the effectiveness of the control in
re-establishment after a short circuit fault. The assumption is that both converters continue to operate
normally during and after the fault. MBPC was utilized in generator torque control.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 132
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.5 1 1.5 2
Vol
tage
, [p
u]
t, [s]
(a) Phase voltage
0
1
2
3
4
5
0 0.5 1 1.5 2
Cur
rent
, [p
u]
t, [s]
(b) Current phasor
1
1.05
1.1
1.15
1.2
1.25
0 0.5 1 1.5 2
Spe
ed,
[pu]
t, [s]
(c) Generator speed
-0.2 0
0.2 0.4 0.6 0.8
1 1.2 1.4
0 0.5 1 1.5 2
PQ
con
trol
, P
t, [s]
(d) PQ control: active power,P
-3
-2.5-2
-1.5-1
-0.5 0
0.5 1
0 0.5 1 1.5 2
PQ
con
trol
, Q
t, [s]
(e) PQ control: reactive power,Q
Figure 10.2: 3P fault: RMS simulation.
Similar results are obtained for a 3-phase fault, in Figs. 10.2(a)–(d). When the fault is applied, the
DOIG model shows a high current peak but the decay is rapid. When the fault clears the over-current
protection operates the crowbar circuit. During the fault, the speed of the generator is maintained
close to its prefault value and returns to normal operation. The simulation results demonstrate the
importance of the control system in limiting the generator current perturbations during a fault.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 133
10.3 WECS Modeling: Assessment of Approach and Validation
Limitations of Presented Modeling Concepts
Even using the medley of subcomponent models as presented inPart I, there are bound to be sig-
nificant differences with expected results, suggesting unresolved deficiencies in the models, inconsis-
tencies in empirical input parameters to the models, and coupling issues between the subcomponent
models cannot be discounted. Other shortcomings include:
1. Use of lower fidelity (reduced order) models – in a model-based control approach, increased
model accuracy implies reduced uncertainty. High-fidelity physical models for WECS are usu-
ally developed during the design process of these components, but their dimensionality is ex-
cessive for current control architectures. As a consequence, model-based controls typically re-
course to lower fidelity models that penalize the achievable performance. A systematic method-
ology for obtaining reduced order models directly from the design models as presented in this
thesis reduce the development cycle for high performance model-based controllers.
2. Neglecting tower shadow modeling – changes in pitch also have a major effect on the thrust
load, which in turn drives the fore-aft motion of the tower. This is turn affects the relative wind
speed seen by the blades, which then feeds back into the pitch control via the aerodynamic
torque — a strong feedback which has a major effect on the stability of the pitch control system.
While this has been neglected in the analysis, the tower shadow involves an unsteady wake
structure, and in a time-averaged sense it can be represented as a velocity deficit in the flow
behind the support tower. Therefore, to a first level of approximation, it can be modelled as a
spatial variation in the flow velocity normal to the chord of the blade section.
The emphasis is on two key areas that need continued serious consideration in WECS modeling:
• the representation of the rotor wake using dynamic inflow and vortex methods, and
• the representation of the unsteady aerodynamics of the blade sections.
Despite their limitations, the presented dynamic inflow models have attractive mathematical forms
and good computational efficiency that will always be appealing for certain types of rotor analyses.
However, it is in the area of vortex wake modelling and the incorporation of these models into wind
turbine analyses that many future challenges lie for the wind turbine analyst. Vortex wake methods
are attractive because of their appealing physical nature and flexibility to handle a broad range of
steady and transient operating conditions.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 134
Model Validation
Many strides have been made in the understanding and modeling of wind turbine aerodynamics, as
evidenced by several publications [1]–[4]. Like all knowledge, however, this understanding of aero-
dynamics is not absolute and can be viewed as tentative, approximate and always subject to revision.
The presented models and control codes are yet to be validated: development of tools for wind turbine
analysis need verification and validation before they can be tested in the field environment [5]–[7]:
Verification: concerned with building the model right. It is utilized in the comparison of the
conceptual model to the computer representation that implements that conception. It asks the
questions: Is the model implemented correctly in the computer? Are the input parameters and
logical structure of the model correctly represented?
Validation: concerned with building the right model. It is utilized to determine that a model
is an accurate representation of the real system. Validation is usually achieved through the
calibration of the model, an iterative process of comparing the model to actual system behavior
and using the discrepancies between the two, and the insights gained, to improve the model.
This process is repeated until model accuracy is judged to be acceptable.
Model verification and validation are essential parts of the model development process if models are
to be accepted and used to support decision making. Both work together for model credibility — to
establish an argument that the model produces sound insights and comparable results to data from the
real system after a wide range of tests and criteria, to remove barriers and objections to model use.
Verification is done to ensure that the model is programmed correctly, the algorithms have been
implemented properly, and that the model does not contain errors, oversights, or bugs. Verification
does not, however, ensure the model solves an important problem, meets a specified set of model re-
quirements, or, correctly reflects the workings of a real wind turbine. Practical verification recognizes
that no computational model will ever be fully verified, guaranteeing 100% error-free implementa-
tion. In principle, the end result is technically not a verified model, but rather one that has passed a
properly structured testing program that increases the level of statistical certainty to acceptable levels!
Practical validation exercises amount to a series of attempts to invalidate a model — explicitly
formulate a series of mathematical tests designed to “break the model”. Presumably, once a model
is shown to be invalid, the model is salvageable with further work and results in a model having a
higher degree of credibility and confidence. The end result of validation is, technically, not a validated
model, but rather a model that has passed all the validation tests — offers a better understanding of the
model’s capabilities, limitations, and appropriateness for addressing a range of important questions.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 135
Initialmodel
First revision of model
Secondrevisionof model
ActualSystem
Compare model to actual
Compare revised model to actual
Compare 2nd revised model to actual
Revise
Revise
Revise
Figure 10.3: Iterative process of calibrating the WECS model.
The constantly growing size of WECS and wind parks is today’s most challenging aspect in power
system analysis. It is thus imperative to compare developed codes with those that have been tested
on flexible control structures of actual prototypes and whose long term simulation capability offer
confidence to allow for an integrated analysis of fault response, control principles, blade and tower
dynamics, and stochastic wind model impact. As an aid in the validation process, Naylor and Finger
[8] formulated a three-step approach which has been widely followed:
1. Build a model that has high face validity.
2. Validate model assumptions.
3. Compare model input-output transformations to corresponding input-output transformations
for the real (‘Actual’) system (or prototype).
Fig. 10.3 illustrates this concept in the validation of the simulation models developed in this thesis.
Two of the commercially available software for validation purposes include:
1. FAST (Fatigue, Aerodynamics, Structures, and Turbulence) Code [9] — a comprehensive
aeroelastic simulator capable of predicting both the extreme and fatigue loads of two- and three-
bladed horizontal-axis wind turbines, and
2. DIgSILENT PowerFactory [10] — incorporates extensive modelling capabilities with advanced
solution algorithms, to provide the analyst with tools to carry out the most complex power
system studies.
Both find typical applications in wind park design studies, verification of connection conditions, gen-
erator control design, harmonic penetration analysis, voltage stability analysis, fault recovery studies,
as well as integrated wind park modeling. Especially in wind power applications, both offer standard
tools, as all required models and simulation algorithms provide unmet accuracy and performance.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 136
10.4 Control: an Appraisal of Classical and Advanced Paradigms
Evolutionary Basis for Intelligent Control Design for Modern WECS
Several attempts have been made to integrate the inspiration, philosophy, history, mathematics, ac-
tualizations, and perspectives of evolutionary computation [9]–[16]. Intelligence and evolution are
intimately connected. Intelligence is a natural part of life. It is also, however, a mechanical process
that can be simulated and emulated. Intelligence is not a property that can be limited philosophi-
cally solely to biological structures. It must be equally applicable to machines. For the process of
intelligence to be understood, methods for its generation should converge functionally and become
fundamentally identical, relying on the same physics whether the intelligence occurs in a living sys-
tem or machine. Intelligence is defined asthe capability of a system to adapt its behavior to meet its
goals in a range of environments. The form of the intelligent system is irrelevant, for its functionality
is the same whether intelligence occurs within an evolving species, an individual, or a social group.
If intelligent decision making is viewed as a problem of optimally allocating available resources in
light of diverse criteria (environmental demands and goals), then machine intelligence can be achieved
by simulating evolution to effectively design controllers for modern WECSs. The process of adapta-
tion is one of minimizing surprise to the adaptive organism, and requires three basic elements:
(i) Prediction — operates as a mechanistic mapping from a set of observed environmental sym-
bols to another set of symbols that represents the expected new circumstance. The mapping is
essentially a model that relates previous experiences to future outcomes. Prediction is an essen-
tial ingredient of intelligence, for if a system cannot predict future events, every environmental
occurrence comes as a surprise and adaptation is impossible.
(ii) Control — an intelligent system must not simply predict its environment but must use its predic-
tions to affect its decision making to be able to allocate its resources (i.e., control its behavior)
with regard to the anticipated consequences of those actions to avoid relegating its future to
nothing but pure luck.
(iii) Feedback — the adaptive mechanism must act on the error in prediction and the associated cost
of inappropriate behaviors to improve the quality of its forecasting. Environmental adaptability
for the intelligent system relies on future event prediction, control of its actions in light of those
predictions, and revising its bases for making predictions based on feedback on the degree to
which it is achieving its goals.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 137
Linear Control Schemes
All complex power production applications nowadays, from gas and steam turbines, to wind turbines,
to integrated gasification combined cycle, require some degree of closed-loop control, for stability
and performance. Classical designs (PI and PID) controllers are widely used throughout industry and
are a good starting point for many wind turbine control applications. A PID controller can be written
in terms of the Laplace variables (similar to a differentiation operator) as
y =
(Ki
s+ Kp +
Kds
1 + sτ
)x (10.1)
wherex is the input error signal to be corrected,y is the control action, and the time constantτ pre-
vents the derivative term from becoming large at high frequency, where it could respond excessively
to signal noise. The tuning parameters are
Ki: Integral Gain – largerKi implies steady state errors are eliminated quicker. The trade-off
is larger overshoot: any negative error integrated during transient response must be integrated
away by positive error before a steady state is reached.
Kp: Proportional Gain – largerKp typically means faster response since the larger the error,
the larger the feedback to compensate. An excessively large proportional gain will lead to plant
instability.
Kd: Derivative Gain – largerKd decreases overshoot, but slows down transient response and
may lead to instability (Kd is zero in a PI controller).
For a variable speed pitch-regulated turbine,x is the difference between the measured generator ro-
tational speed and the demanded or rated speed andy is the demanded pitch angle. Above rated, the
pitch is used to regulate the rotor speed to the desired value, while the generator torque or power is
held constant. Below rated the pitch is forced to the fine pitch limit, but the generator torque is varied
in order to control the generator speed.
A measure of ingenuity in selection of tuning parameters in (10.1) with respect to pitch control
design is a prerequisite. For example, a pitch controlled machine crossing rated wind speed may take
too long before the pitch starts acting. On the other hand, a very short time constant may result in
slower simulations. If the PI controller being modelled is actually implemented in discrete form, as is
usual, then the desaturation time constant should be chosen to be somewhat smaller than the discrete
controller timestep. Alternatively, specify a zero time constant for instantaneous desaturation.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 138
Typically, a well-tuned PID was sufficient for the first generation of control solutions where,
generally, the problems in complex plants were related to performance improvement of different local
loops. However, nonlinear limitations imposed by the actuators (magnitude, rate, duty cycle) limit
the achievable performance of the controllers, which is also coupled with the design of the different
components. The major limitations of PI(D) control for WECS applications include:
1. PID controllers, when used alone, can give poor performance when the PID loop gains must
be reduced so that the control system does not overshoot, oscillate or “hunt” about the control
setpoint value. The control system performance thus needs to be improved by combining the
PID controller functionality with that of a feed-forward control output. Since the feed-forward
output is not a function of the plant feedback, it can never cause the control system to oscillate,
thus improving the system response and stability.
2. PID controllers are linear, hence their performance in WECS systems that are non-linear is
variable. Thus practical application issues can arise from instrumentation connected to the con-
troller, such as need for high sampling rate, measurement precision, and measurement accuracy.
Often PID controllers need to be enhanced through methods such as gain scheduling or fuzzy
logic.
3. Integral windup during implementation — refers to the situation where the integral, or reset
action continues to integrate (ramp) indefinitely. This usually occurs when the controller’s
output can no longer affect the controlled variable, which in turn can be caused by controller
saturation (the output being limited at the top or bottom of its scale), or if the controller is part
of a selection scheme and it is not the selected controller. This needs to be addressed by:
a) Initializing the controller integral to a desired value, commonly the process present value for
startup problems
b) Disabling the integral function until the plant has entered the controllable region
c) Limiting the time period over which the integral error is calculated
d) Preventing the integral term from accumulating above or below pre-determined bounds.
4. Due to the differential term in the PID, small amounts of measurement or process noise can
cause large amounts of change in the output. This requires the additional use of a low-pass
filter to filter the measurements. However, low-pass filtering and derivative control cancel each
other out, so reducing noise by instrumentation means is a much better choice. Alternatively,
the differential band can be turned off in most systems with little loss of control — equivalent
to using the PID controller as a PI controller.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 139
Advanced Multiobjective Controllers
Starting from inability of classical PI or PID algorithms that act on a single input signal (to generate a
pitch demand), advanced controllers proposed in this thesis rely on a synthesis of both pitch regulation
and a torque demand to address the following objectives:
• controlling pitch and torque together to improve the trade-off between energy capture,
actuator duty, and loads;
• the use of higher-order controllers to tackle particular problems in the turbine dynamics;
• using the control algorithm to provide damping for lightly damped resonant responses;
• algorithm design using optimal feedback or other techniques in which the trade-off between
different design objectives can be included explicitly in the design.
None of these ideas is new and all of them have been explored to some extent for wind turbines. In this
thesis the above are handled by the proposed control schemes, including the LQG, STR, and MBPC,
and all rely on an elaborate model of the WECS system. Problem formulation is normally the most
difficult part of the process. It is the selection of design variables, constraints, objectives, and models
of the disciplines. A further consideration is the strength and breadth of the interdisciplinary coupling
in the problem. Once the design variables, constraints, objectives, and the relationships between them
have been chosen, the problem can be expressed in the following standard format:
find x that minimizes J (x) subject to g(x) ≤ 0, h(x) = 0 and xlb ≤ x ≤ xub (10.2)
whereJ is an objective,x is a vector of design variables,g is a vector of inequality constraints,
h is a vector of equality constraints, andxlb andxub are vectors of lower and upper bounds on the
design variables. Maximization problems can be converted to minimization problems by multiplying
the objective by -1. Constraints can be reversed in a similar manner. Equality constraints can be
replaced by two inequality constraints. This leads to the optimization cost functionJ generally used
to calculate the optimum control law, and is given by:
J =∑
wxi(ri − xi)
2 +∑
wui∆u2
i (10.3)
without violating constraints (low/high limits).x i is thei-th control variable,ri is thei-th reference
variable,ui is thei-th manipulated variable,wxiis weighting coefficient reflecting the relative impor-
tance ofxi, andwuiis weighting coefficient penalizing relative big changes inui. This is the basis of
adaptive multiobjective control design that relies on state-estimation for full-state feedback.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 140
While moving towards larger wind turbine installations, more stringent requirements and system-
atic design of the plants to meet the specifications while minimizing cost, model-based multiobjective
control design is becoming more frequently the design method of choice. In power generation applica-
tions, model-based control design methods have to address typical problems associated with complex
applications such as large order models and actuator nonlinearities, but also specific issues – dynamic
nonlinearities, mode coupling or limitations due to conflicting control objectives. The performance
obtained by these controllers is crucial in wind power generation for which feedback control is a vital
component of the overall operation. The appeal of the proposed advanced schemes is that they are
multiobjective, and make use of the following concepts, singly or in combination:
• Observers – utilize a subset of the known dynamics to make estimates of a particular variable.
In this case, the estimated wind speed can then be used to define the appropriate pitch angle.
• State estimators – using a full model of the dynamics, a Kalman filter can be used to estimate
all the system states from the prediction errors. Thus it is possible explicitly to take account of
the stochastic nature of the wind input by formulating a wind model driven by a Gaussian input.
• Optimal feedback – the cost function approach means that the trade-off between partially com-
peting objectives is explicitly defined by selecting suitable weights for the terms ofJ .
It is noteworthy that efficiency of a WECS does not scale simply by physical dimensions and control
plays a significant role in increasing the size of the machine while decreasing the structural loads and
improving the rotor efficiency. Challenges in implementing advanced control paradigms include:
1. Most of these techniques require large numbers of evaluations of the objectives and the con-
straints. The disciplinary models are often very complex and can take significant amounts of
time for a single evaluation. The solution can therefore be extremely time-consuming. For-
tunately, many of the optimization techniques are adaptable to parallel computing, and much
current research is focused on methods of decreasing the required time.
2. A vital aspect of the development of new control algorithms for the novel schemes is the as-
sessment of their effectiveness. This is difficult because of the variability of the wind input.
Suitable approaches to the evaluation of controller performance is thus limited to simulations.
3. Field trials – despite the power and reliability of some of the simulation models now avail-
able, there is no substitute for field trials in real wind conditions. The variability of the wind
makes it particularly difficult to carry out field trials repeatably and reliably, particularly if the
effectiveness of two or more alternative controllers is to be compared (or their cost benefit!).

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 141
10.5 Conclusions
In Part I, various concepts are brought forth as a basis for modelling the various components of
the drive train in order to formulate the control objectives for controller design.Chapter 1gives an
overview of wind energy as well as motivation for this study. The control objectives are determined
as twofold: the optimization of energy conversion and mitigation of shaft torque torsional moments to
check cyclic-stress-induced fatigue damage to mechanical subsystems.Chapter 2details the essential
concepts in aerodynamic conversion modeling, and formulates a model for the expected output of the
WECS. The importance of turbine linearization in controller design is emphasized and developed.
Reliability of wind turbine system is based on the performance of its components under assigned
environment, manufacturing process, handling, and the stress and aging process. As part of the design
process, a wind turbine must be analyzed for aerodynamic loads, gravitational loads, inertia loads
and operational loads it will experience during its design life.Chapter 3develops a mathematical
model for the mechanical drive train as a multi-inertial system coupled by elastic linkages. The
main idea is to examine stresses on the drive shaft as well as the gearbox — a source of failures and
defects in many wind turbines. The electrical system of the wind turbine includes all components
for converting mechanical energy into electrical power. A brief review of the generator has been
illustrated inChapter 4.
Chapter 5analyzes the simulation of a real-time wind speed (which is, invariably, the stock-in-
trade for the WECS) for a generic site. The mean wind speed is obtained from an annual Rayleigh
probability density curve and the turbulence component modelled as an instantaneous variation, ob-
tained via a constrained stochastic simulation scheme. The generated gusts have the desired properties
and are used as input for wind turbine design tools in order to assess the extreme loading. This is then
used to formulate a real-time wind profile from Gaussian noise thus enabling the determination of the
response of the WECS under highly stochastic environmental conditions.
Part II develops a control strategy for WECS control based on harmonization between pitch angle
control and generator torque control. One of the main goals of control is to increase power produc-
tion and reduce loads with a minimum number of control inputs required for turbine measurement.
Chapter 6describes the control philosophy and expounds on the classical linear PI(D) controllers
to regulate power. Several control configurations, whose common denominator is multiobjectivity,
are mooted for control of a 2-MW class WECS, based on subsystems’ modeling. The design of the
control schemes attempts to maximize performance (e.g. efficiency, throughput, specific energy con-
sumption) while maintaining stability and physical integrity under both wind and load disturbances.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 142
Chapter 7reviews the LQG controller for generator torque control. For the nonlinear WECS
system, the basic idea of feedback is tremendously compelling as it enhances stability, improves the
steady-state error characteristics, and provides disturbance rejection due to a stochastic wind. The
LQG control objective for the WECS multivariable system has been to obtain a desirable behavior of
several output variables by simultaneously manipulating several input channels. A hybrid controller
is also mooted, based on the idea of augmenting the LQG with a neurocontroller, the latter to cater
for the nonlinearities in the system. The hybrid shows remarkable improvement in control.
Chapter 8introduces the STR that consists of two parts: an estimator and a control law, that are
invoked at every sample period. The purpose of the RLS algorithm (estimator) is to dynamically
estimate the model of the WECS system relating the measured metrics with the actuation. For the
control law, LQ tracking optimal control design employs the RLS algorithm based on an equivalent
non-minimal state space realization of the WECS model. No state observer is required.
MBPC is conceptually a natural method for generating feedback control actions for linear and
nonlinear plants subject to pointwise-in-time input and/or state-related constraints.Chapter 9pro-
poses the MBPC scheme for generator torque control. An important observation is made: in contrast
to MBPC, in feedback-control systems of more traditional type, e.g., LQG orH∞ control, constraints
are indirectly enforced, by imposing, whenever possible, a conservative behavior at a performance-
degradation expense. Other instances where MBPC can be advantageously used comprise uncon-
strained plants for which off-line computation of a control law is a difficult task as compared with
on-line computations via receding-horizon control.
Chapter 10gives an overview of the modeling approach employed in the thesis, as well as an
evaluation of the merits and demerits of the various control paradigms proposed herein.
Remark
Classical methods based on PI(D) algorithms are a good starting point for many aspects of closed loop
controller design for variable speed turbines. However, as turbines become larger and more flexible,
it is increasingly important not only to consider the effect that the controller has on component loads,
but even to design the controller with load reduction as part of the primary objective.
Of the proposed control techniques, clearly, no paradigm is extremely superior to the others: all
have inherent capabilities as well as shortcomings. The appeal is that they are able to capture the
nonlinearities in the turbine and devise the pertinent control signals for effective energy conversion
and mitigation of drive train loads. However, most commercial wind turbines still use fairly basic
control techniques, leaving a wide scope for improvement in the coming years.

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 143
References
[1] Y. Coughlan, P. Smith, A. Mullane, and M. O’Malley, “Wind turbine modeling for power system
stability analysis – a system operator perspective,”IEEE Trans. Power Systems, vol. 22, no. 3,
pp. 929-936, Aug. 2007. doi: 10.1109/TPWRS.2007.901649.
[2] D. J. Trudnowski, A. Gentile, J. M. Khan, and E. M. Petritz, “Fixed-speed wind-generator and
wind-park modeling for transient stability studies,”IEEE Trans. Power Systems, vol. 19, no. 4,
pp. 1911-1917, Nov. 2004. doi: 10.1109/TPWRS.2004.836204.
[3] A. Rauh, and J. Peinke, “A phenomenological model for the dynamic response of wind turbines
to turbulent wind,”J. Wind Engineering and Industrial Dynamics, vol.92, pp. 159-183, 2004.
[4] V. Akhmatov, and H. Knudsen, “An aggregate model of a grid-connected, large-scale, offshore
wind farm for power stability investigations – importance of windmill mechanical system,”Elec-
trical Power and Energy Systems, vol. 24, pp. 709-717, 2002.
[5] M. Martins, A. Perdana, P. Ledesma, E. Agneholm, and O. Carlson, “Validation of fixed speed
wind turbine dynamic models with measured data,”Renewable Energy, vol. 32, pp. 1301-1316,
2007.
[6] C. Eisenhut, F. Krug, C. Schram, and B. Klockl, “Wind turbine model for system simulations
near cut-in wind speed,”IEEE Trans. Energy Conversion, vol. 22, no. 2, pp. 414-420, June 2007.
doi: 10.1009/TEC.2006.875473.
[7] P. N. Finlay, and J. M. Wilson, “The paucity of model validation in operational research
projects,”Journal of the Operational Research Society, vol. 38, no. 4, pp. 303-308, April 1987.
doi: 10.2307/2582053.
[8] T. H. Naylor, and J. M. Finger, “Verification of computer simulation models,”Management
Science, vol. 14, no. 1, pp. 92-101, Oct. 1967.
[9] J. M. Jonkman, and M. L. Buhl Jr,FAST User’s Guide, Technical Report, NREL/EL-500-38230.
A publication of the National Renewable Energy Laboratory (A national laboratory of the U.S.
Department of Energy, Office of Energy Efficiency & Renewable Energy). Aug. 2005.Available
online: http://wind.nrel.gov/designcodes/simulators/fast/
[10] DIgSILENT PowerFactory. An Integrated Power System Analysis Software for Wind Power
Applications, from DIgSILENT GmbH.Homepage: http://www.digsilent.de

CHAPTER 10. ANALYSIS, PERSPECTIVES, AND CONCLUSIONS 144
[11] C. Darwin, On the Origin of Species by Means of Natural Selection or the Preservations of
Favored Races in the Struggle for Life, London: John Murray, 1859.
[12] J. H. Holland,Adaptation in Natural and Artificial Systems: An Introductory Analysis with
Applications to Biology, Control and Artificial Intelligence, Cambridge, MA: MIT Press, 1995.
[13] D. E. Goldberg,Genetic Algorithms in Search, Optimization and Machine Learning, MA:
Addison-Wesley 1989.
[14] A. Hoffman,Arguments on Evolution: A Paleontologist’s Perspective, New York: Oxford Uni-
versity Press, 1989.
[15] B. D. Fogel,Evolutionary Computation: Toward a New Philosophy of Machine Intelligence,
NY: IEEE Press, 1995.
[16] K. A. De Jong,An Analysis of the Behaviour of a Class of Genetic Adaptive Systems, Doctoral
Dissertation, Dept. of Computer and Communications Sciences, University of Michigan, Ann
Arbor, 1975.
[17] F. Rosenblatt,Principles of Neurodynamics: Perceptrons and the Theory of Brain Mechanisms,
Washington, DC: Spartan Books, 1962.
[18] R. Axelrod, “The Evolution of Strategies in the Iterated Prisoner’s Dilemma,” InGenetic Algo-
rithms and Simulated Annealing, edited by L. Davis, London: Pitman, pp. 32-41, 1987.

Chapter 11
Future Work
11.1 Introduction
THERE are two approaches to allow for uncertainty in system models and disturbances: adaptive
versus robust control. The first approach is to use an adaptive controller, which estimates
parameters and calculates the control accordingly. Self-tuning devices have been very successful,
but they involve online design computations and are therefore not as simple as a fixed controller to
implement. The second approach is to allow for uncertainty in the design of the fixed controller, thus
producing a robust control scheme — one which is insensitive to parameter variations or disturbances.
Future research is in the direction of control based on the following two concepts:
• H2/H∞ — these formulations eliminate the stochastic element and permit a frequency
domain view by allowing the introduction of frequency dependent weighting functions; and
• (Neuro)Fuzzy controllers — rely on fuzzy logic to model imprecise concepts and
evolve context-dependent controllers via optimization.
TheH∞ design approach can be combined with self-tuning action to obtain arobust adaptive
controller [1]-[3]. The H∞ concept is particularly appropriate when improving robustness, in the
face of WECS plant perturbations due to high wind turbulence, or parameter uncertainty.
Fuzzy controllersare implemented using fuzzy rules, which can reduce the number of computa-
tions in conventional controllers. It is also claimed that they can be implemented more easily than
conventional controllers. The most popular kind of fuzzy systems are based on either the Mamdami
fuzzy model, Takagi-Sugeno-Kang (TSK) fuzzy model, Tsukamoto fuzzy model or Singleton fuzzy
model. To define a fuzzy logic controller it is necessary to introduce IF-THEN rules to establish
how probable the process variable is. To evaluate the rules, the definition offuzzy operationsis also
needed. The application of the rules defines fuzzy set values of fuzzyoutput sets.

CHAPTER 11. FUTURE WORK 146
11.2 H∞-Optimization for WECS
Design byH∞-optimization as a design tool for linear multivariable WECS control involves the
minimization of the peak magnitude of a suitable closed-loop system function. It is very well suited to
frequency response shaping. Moreover, robustness against plant uncertainty is handled more directly.
Introducingµ-synthesis in the design aims at reducing the peak value of the structured singular value.
It accomplishes joint robustness and performance optimization.H∞-optimization amounts to the
minimization of the∞-norm of the relevant frequency response function. The name1 derives from
the fact that mathematically the problem may be set in the spaceH∞, which consists of all bounded
functions that are analytic in the right-half complex plane. An important aspect ofH∞ optimization
is that it allows to include robustness constraints explicitly in the criterion.
Properties of H∞ Robust Control Design
There are several advantages of theH∞ control design approach. The technique can be easily com-
puterised and formalized design procedures can be introduced. Design issues can be considered in
the frequency domain and classical design intuition can be employed. However, the most important
advantage is that stability margins can be guaranteed and performance requirements can also be sat-
isfied, in a unified design framework. TheH∞ design approach is distinguished by the following
features and properties:
• It is a design procedure developed specifically to allow for the modeling errors, which are
inevitable and limit high-performance control systems design.
• There is a rigorous mathematical basis for the design algorithms, which enables stability and
robustness properties to be predicted with some certainty.
• There are close similarities between state-space versions ofH∞ controllers and the well-known
Kalman filtering orH2/LQG control structures.
• If the uncertainty lies within the class considered, stability properties can be guaranteed and
safe reliable systems can be assured. Note that the design procedures cannot be used blindly,
since poor information can still lead to controllers with poor performance properties.
• The trade-offs between good stability properties and good performance are easier to make in a
H∞ context than with many of the competing designs.1Named after the British mathematician G. H. Hardy.

CHAPTER 11. FUTURE WORK 147
• The approach can be interpreted in terms of the stochastic nature of the system, but if distur-
bances and noise are importantH2/LQG may still be the preferred solution.
• The H∞ design technique is easy to use, since the algorithms are available in commercial
software.
The main disadvantage is that methods of handling parametric uncertainty are not handled so naturally
in theH∞ framework. A high-performance robust design would take account of this structure, but the
basicH∞ approach does not account for this type of information. However, there are several ways of
modifying the method to allow for parametric uncertainties, includingµ-synthesis andH∞ adaptive
control. TheH∞ design approach is a strong contender to provide a general purpose control design
procedure, which can account for uncertainties and is simple to use with computer-aided design tools.
Comparison of H∞ and H2/LQG Controllers
The similarities and differences between theH∞ and theH2/LQG approaches are detailed below:
1. Similarities
(a) BothH2 andH∞ optimal controllers are based on the minimization of a cost index.
(b) Some of the closed-loop poles of the LQG solution will be the same as those of theH∞ solution
in certain limiting cases.
(c) The dynamic cost weights have a similar effect in both types of cost function, e.g. integral
action can be introduced via an integrator in the error weighting term in both cases.
(d) Closed-loop stability can be guaranteed, whether the plant be non-minimum phase, or unstable
(neglecting for the moment uncertainty and assuming controllers are implemented in full).
2. Differences
(a) The basic conceptual idea behindH∞ design involves the minimization of the magnitudes of a
transfer function, which is quite different from theH2/LQG requirement to minimize a complex
domain integral representing error and control signal power spectra.
(b) TheH∞ design approach is closer to that of classical frequency response design in that the
frequency-response shaping of desired transfer functions is attempted.
(c) The calculation ofH∞ controllers is more complicated than the equivalentH2/LQG controllers,
whether this be in the time or frequency domains.

CHAPTER 11. FUTURE WORK 148
11.3 Fuzzy Logic Control
The Fuzzy Logic System (FLS) employs a set of N fuzzy linguistic rules. These rules may be provided
by experts or can be extracted from numerical data. In either case, engineering rules in FLS are
expressed as a collection of IF – THEN statements. Therefore a fuzzy rule base R containing N fuzzy
rules can be expressed as:
R = [Rule1, Rule2, ..., Rulei, ..., RuleN ] (11.1)
where thei − th rule is:
Rulei : IFz(k) is A THEN u(k) is βi (11.2)
wherek refers to the variable values at timet = k∆t. Moreover, the vector
z(k) = [z1(k), ..., zl(k)]T (11.3)
represents all thel fuzzy inputs to the FLS. On the other hand,u(k) represents the fuzzy output of the
FLS. In the antecedent of thei − th rule, the term
A = [A1i , ..., A
li]
T (11.4)
represents the vector of the fuzzy sets referring to the input fuzzy vectorz(k). The membership
functions of both the input vectorz(k) and the vectorA of the fuzzy sets are Gaussian, and assume
the following expressions:
µzj(k) = e−1/2[(zj (k)−zj)/σzj ]2 (11.5)
µAij(k) = e
−1/2
»(zj(k)−Ai
j)/σAi
j
–2(11.6)
wherezj andσzj are the mean value and the variance of the Gaussian membership function of the
j − th input, zj(k). Likewise, Aij and σAi
jare the mean value and the variance of the Gaussian
membership function of thej − th fuzzy set referring to thei − th fuzzy rule,Aij . The termszj and
σzj are known constants, whileAij andσAi
jrepresent the unknown parameters of the FLS. These
parameters will be adapted to the controlled wind system by minimizing an appropriate cost function.

CHAPTER 11. FUTURE WORK 149
y(k) Fuzzycontroller
z-1
z-1
WECS Plant
u(k)z(k)
y(k-1)
u(k-1)
r(k)
Figure 11.1: Layout of the fuzzy control system.
The output of the fuzzy controller,u(k), assumes the following expression [4]
u(k) =
∑Ni=1 βi
∏lj=1 µQi
j[zj,max(k)]∑N
i=1
∏lj=1 µQi
j[zj,max(k)]
(11.7)
where
µQij[zj(k)] = µzj(k)µAi
j(k). (11.8)
Moreover,
zj,max(k) =zjσ
2zj + Ai
jσ2Ai
j
σ2zj + σ2
Aij
(11.9)
is the value of thej − th input that maximizes (11.8). The maximization of Eq. (11.8) represents the
supremumoperation in thesup-starcomposition of thei − th rule [4]. This fuzzy controller appears
to be parameterized by
θ(k) =Ai
j(K), σAij(k), βi(k)i = 1, 2, ..., N ; j = 1, 2, ..., l
. (11.10)
In the next section, a procedure that allows an on-line adaptation of the parametersθ(k) to the
controlled wind system will be introduced. The fuzzy logic control system adopted is represented in
Fig. 11.1. The fuzzy input vector is defined as:
z(k) = [y(k − 1), r(k), u(k − 1)]T (11.11)
wherey(k) is the output of the plant (controlled variable),u(k) is the control variable (output of the
fuzzy controller), andr(k) represents a reference signal fory(k).

CHAPTER 11. FUTURE WORK 150
y(k) Fuzzycontroller
z-1
z-1
WECS Plant
u(k)z(k)
y(k-1)
u(k-1)
r(k)
LSA parameter estimator
+ _
r(k+1) y(k+1)
Figure 11.2: Fuzzy control system with the parameter estimator.
11.3.1 Estimator-Based Adaptive Fuzzy Logic
In general, an Adaptive Fuzzy Logic (AFL) control starts from an initially assumed set of parameters
θ(0), whose only requirement is to stabilize the plant. Then, at each time step, the AFL control adapts
the set of parametersθ(k), in order to minimize the cost function:
J (k) =1
2e2
y(k) (11.12)
whereey(k) is the control error defined as:
ey(k) = r(k) − y(k). (11.13)
The control errorey(k) can be determined only if a deterministic model of the controlled system is
available. In this case it is supposed that noa priori deterministic model of the controlled system is
available. The Estimator-based Adaptive Fuzzy Logic (EAFL) control here suggested allows to solve
this class of problems. Indeed, instead of deriving the appropriate change in each internal parameter
from the control errorey(k), the EAFL refers to an approximate estimation of the control error
ey(k) = r(k) − y(k) (11.14)

CHAPTER 11. FUTURE WORK 151
and to the corresponding cost function:
J (k) =1
2e2
y(k). (11.15)
In Eq. (11.14),y(k) represents the estimated value of the output at the timek, to be evaluated. As
stated in [5], the present system can be expressed as follows:
y(k) = aky(k − 1) + bku(k − 1) (11.16)
whereak and bk represent the time-varying coefficients of model (11.16). If the controlled plant
is observable, then (11.16) represents its model in state space notation. In such a case, the model
coefficientsak andbk are unknown. These coefficients can be on-line estimated by applying the Least
Square Algorithm (LSA) in recursive form [5],[6]. As a consequence, the basic scheme of the fuzzy
control system has to be modified as shown in Fig. 11.2, where the LSA estimator evaluates the
coefficientsak and bk. Assuming that such coefficients do not change from the timek to the time
k + 1, the estimated model of the controlled system one-step-ahead, i.e., at timek + 1, assumes the
following expression:
y(k + 1) = aky(k) + bku(k) (11.17)
which is the output of the LSA parameter estimator (Fig. 2).
The signaly(k + 1) is compared to the reference signalr(k + 1) and the difference determines
the modification of the fuzzy controller parametersθ(k). This is implemented by rewriting the cost
functionJ at timek + 1 as:
J (k + 1) =1
2
r(k + 1) − [aky(k) + bku(k)
]2. (11.18)
The minimization of the cost functionJ (k + 1) can be easily accomplished by using the gradient
descent algorithm as follows:
θ(k) = θ(k − 1) − η∂J (k + 1)
∂θ(11.19)

CHAPTER 11. FUTURE WORK 152
where the sensitivity derivatives ofJ (k + 1) with respect toθ (refer to (11.10)) are given by:
∂J (k + 1)
∂βi= −bkey(k + 1)
∏lj=1 wij(k)∑N
i=1
∏lj=1 wij(k)
(11.20)
∂J (k + 1)
∂Aij
= −bkey(k + 1)−vij(k)
∑Ni=1 cij
∏lj=1 wij(k)[βi − u(k)]∑N
i=1
∏lj=1 wij(k)
(11.21)
∂J (k + 1)
∂σAij
= −bkey(k + 1)σAi
jv2
ij(k)∑N
i=1 cij
∏lj=1 wij(k)[βi − u(k)]∑N
i=1
∏lj=1 wij(k)
(11.22)
where:
vij =Ai
j − zj
σ2Ai
j
+ σ2zj
(11.23)
wij(k) = e−1/2(Ai
j−zj)2/
σ2
Aij
+σ2zj
!(11.24)
The coefficientη is the rate of descent which can be chosen arbitrarily. Moreover,cij is equal to 1 if
the i-th rule is dependent on thej-th input, otherwise it is equal to 0.
11.4 Remarks
After several years of efforts in design of control schemes for wind turbines, the wind industry is
slowly succumbing to advanced controllers that offer a series of advantages over the classical linear
systems. Research has been undertaken and various configurations proposed, for WECS control
involving H∞ controllers [7]–[9] and Fuzzy logic schemes [10],[11], though successful practical
implementation of these paradigms is not (yet) documented. From the pedagogical overview of some
of the most promising and recent developments in advanced control for WECS discussed in this
report, future research work is motivated by two issues:
capability of the novel multiobjective controllers for effective energy conversion and drive-load
reduction for MW-class WECSs, and
flexibility on the part of wind turbine manufacturers to embrace a shift from the classical PID.
Furthermore, rapid improvements in computer hardware, combined with stiff competition in the wind
industry as well as various governments’ regulations are largely responsible for research in advanced
control. Future research aims to address the frequently expressed improvement sought — to decrease
control response time (including model development, computation, programming, communications,
user interface), not just the cost benefit — as these advanced paradigms mature to a commodity status.

CHAPTER 11. FUTURE WORK 153
References
[1] M. J. Grimble, “H∞ robust controller for self-tuning applications, Part 1: Controller design,”
Int. Journal of Control, vol. 46, no. 4, pp. 1429-1444, 1987.
[2] M. J. Grimble, “H∞ robust controller for self-tuning applications, Part 2: Self-tuning and ro-
bustness,”Int. Journal of Control, vol. 46, no. 5, pp. 1819-1840, 1987.
[3] N. A. Fairbairn, and M. J. Grimble, “H∞ robust controller for self-tuning applications, Part 3:
Self-tuning controller implementation,”Int. Journal of Control, vol. 52, no. 1, pp. 15-36, 1990.
[4] J. M. Mendel, “Fuzzy logic systems for engineering: a tutorial,”Proceedings of the IEEE, vol.
83, no. 3, 1995.
[5] G. C. Goodwin, and K. S. Sin,Adaptive, filtering, predfiction and controlPrentice-Hall Inc.,
Englewood Cliff, New Jersey, 1984.
[6] A. L. Dadone, L. D’Ambrosio, and B. Fortunato, “One-step-ahead adaptive technique for wind
systems,”Energy Conversion and Management, vol. 39, no. 5/6, pp. 399, 1998.
[7] T. Senjyu, E. Omine, D. Hayashi, E. B. Muhando, A. Yona, and T. Funabashi, “Balancing
control for dispersed generators considering torsional torque suppression and AVR performance
for synchronous generators,”IEEJ Trans. Power and Energy, vol. 128, no. 1, pp. 75-83, 2008
(in Japanese).
[8] B. Connor, S. N. Iyer, W. E. Leithead, and M. J. Grimble, “Control of a horizontal axis wind
turbine using H infinity control,”First IEEE Conference on Control Applications, 13-16 Sept.
1992, vol. 1, pp. 117-122. doi: 10.1109/CCA.1992.269889.
[9] Dengying, Y. Shiming, W. Xiangming, L. Sun, and L. Jiangjing, “Researches on a controller
for reducing load of driving chain in wind turbine based onH∞ control,” IEEE Int. Conf. on
Automation and Logistics, 18-21 Aug. 2007, pp. 1-4. doi: 10.1109/ICAL.2007.4338573.
[10] M. G. Simoes, B. K. Bose, and R. J. Spiegel, “Fuzzy logic based intelligent control of a variable
speed cage machine wind generation system,”IEEE Trans. Power Electronics, vol. 12, no. 1,
Jan. 1977.
[11] I. G. Damousis, M. C. Alexiadis, J. B. Theocharis, and P. S. Dokopoulos, “A fuzzy
model for wind speed prediction and power generation in wind parks using spatial cor-
relation,” IEEE Trans. Energy Conversion, vol. 19, no. 2, pp. 352-361, June 2004. doi:
10.1109/TEC.2003.821865.

Appendix A
Parameters Setting
A.1 WECS Model Details
Table A.1: WECS parameters and baseline safety operational limitsPARAMETER VALUEWind turbine and rotor
blade radius,R 35 mnumber of blades 3hub height 61.5 mrated wind speed,vr 12.205 m/scut-in/cut-out wind speed 4/25 m/sgearbox ratio,Kgr 83.33turbine inertia,Jt 6.029E+06 kgm2
low speed shaft torsional stiffness,Ks 1.6E+08 Nm/radlow speed shaft torsional damping,Ds 1.0E+07 Nms/rad
Generator and grid networkrated capacity,Pr 2 MWoptimal mode maximum generator speed 1500 rpmgenerator inertia,Jg 60 kgm2
max/min generator torque,Γg ,max/min 14.4/0 kNmgenerator torque set-point 13.4 kNmax/min generator speed 1800/850 rpmgenerator stator resistance 0.01Ωgenerator rotor resistance 0.01Ωstator leakage inductance 95.5E-06 Hrotor leakage inductance 95.5E-06 Hgenerator magnetizing (mutual) inductance 0.0955 Hstator rated voltage,Ve 690 Vstator rated (electrical) frequency,fn 50 Hzrotor rated magnetizing current 1700 A
Pitch controllermax/min pitch angle,βmax/min 90/-2 degmax/min pitch rate,βmax/min 8/-8 deg/s

APPENDIX A. PARAMETERS SETTING 155
A.2 Aerodynamics Information
A.2.1 Steady-state Operation Point Parameters
Table A.2: Performance coefficients calculationrated wind speed 12.205 m/sminimum tip-speed ratio 2maximum tip-speed ratio 20tip-speed ratio step 0.1pitch angle -2 degrotor speed 20 rpm
A.2.2 Wind Speed Simulation Parameters
Table A.3: Simulated time-dependent wind field parameters at hub heightmean wind speed for simulation 12.205 m/sflow inclination 8 deginterpolation scheme cubicsampling period,∆tw 0.1 sturbulence intensity:
longitudinal 16.0108 %lateral 12.5465 %vertical 8.92472 %
turbulence charactertistics:spectrum type von Karmanwidth of turbulent wind field 100 mheight of turbulent wind field 100 mlength of turbulent wind field 1804.8mstep-size of turbulent wind field 0.88125 m
Table A.4: Physical constantsair density,ρ 1.225 kg/m3
air viscosity,ν 1.82E-05 kg/msgravitational acceleration,g 9.81 m/s2
density of water,ρw 1027 kg/m3
Notes:
1. For Table A.3, the rated speed is taken as the mean wind speed for simulation.
2. Details on the determination of the various values for 3-D turbulence intensity are obtained
from the IEC 61400-1 Standard, as explained in Section A.2.3.

APPENDIX A. PARAMETERS SETTING 156
A.2.3 The IEC61400-1 Standard for Turbulence Model
The extreme wind events experienced by the WECS are included in the currently available draft of
the IEC-Standard as extreme load conditions that must be considered as ultimate load cases when
designing a wind turbine. Within the framework of the IEC 61400-1 Std these load situations are
defined in terms of two independent site variables — a reference mean wind speed and a characteristic
turbulence intensity, TI.
Turbulence in random ten-minute periods has more scatter at low wind speeds. This is both
because the uncertainty depends on the ratio of the time scale and sample duration, and because
deviation from neutral atmospheric stability is more pronounced at low wind speeds. These effects
are accounted for by an empirical formula in edition 3 of the IEC61400-1 Standard:
The Standard defines therepresentative turbulence intensity,σ1, as the mean + 1.28 times the
standard deviation of random ten-min measurements. Load cases are defined by thereference
turbulence intensity, Iref , which is equal to the mean turbulence intensity at 15 m/s
σ1 = Iref
[(15m/s + aVhub)
(1 + a)+ 1.28 × 1.44m/s
]. (A.1)
Note that in the formula the variability is added as an extra term becauseIref refers to mean TI. The
representative TI may be defined by the actual edition 3 formula that is equal to the more complex
formulation whena = 3 as follows:
σ1 = Iref(0.75Vhub + 5.6m/s). (A.2)
The values in Table A.5 are specified for the turbulence model:
Table A.5: IEC 61400-1 Ed. 3 parameter assignmentsClass A B C SIref 0.16 0.14 0.12 Designer specifies
In this thesis, a Class A turbulence site is considered. For the seasonal mean wind speed of 7 m/s,
cut-in wind speed of 4.0 m/s, and operation at rated wind speed of the turbine equipment (12 m/s),
the prevailing turbulence intensities (longitudinal, lateral and vertical) are obtained as (16.0108%,
12.5465%, and 8.92472%), respectively, as given in Table A.3. In almost all circumstances the
horizontal component of the wind is much larger than the vertical — the exception being violent
convection.

APPENDIX A. PARAMETERS SETTING 157
A.2.4 Annual Energy Yield
The annual energy yield is calculated by integrating the power curve for the turbine together with a
Weibull distribution of hourly mean wind speeds. The power curve is defined at a number of discrete
wind speeds, and a linear variation between these points is assumed. The Weibull distribution is
defined by:
F (vw) = 1 − e−( vwcvw
)k
(A.3)
whereF is the cumulative distribution of wind speed. Thus the probability densityf(vw) is given by
f(vw) = −kvk−1
w
(cvw)ke−( vw
cvw)
k
(A.4)
with k as the Weibull shape parameter andc as the scale factor. For a true Weibull distribution, these
two parameters are related by the gamma function:
c = 1/Γ
(1 +
1
k
). (A.5)
Unless the user supplies the value forc, its value is calculated as above. Note that if a different value
is supplied, the resulting distribution will have a mean value that is different fromvw.
The annual energy yield is calculated as
E = Y
cut−out∫cut−in
P (vw)f(vw)dvw (A.6)
where
P (vw) = power curve, i.e., electrical power as a function of wind speed, given in (2.6)
Y = length of a year, taken as 365 days.
The result is further multiplied by the availability of the turbine, which is assumed for this purpose to
be uncorrelated with wind speed (see Section 2.2.4:Capacity Factor). The aforegoing is the basis of
mean wind speed calculation for a given site as mentioned in Section 5.2:Determination of Mean
Wind Speed, vm.

Appendix B
Supporting Concepts
B.1 Per Unit System for the WECS Model
In electrical engineering in the field of power transmission a per-unit system is the expression of
system quantities as fractions of a defined base unit quantity. A per-unit (pu) system provides units for
power, voltage, current, impedance, and admittance. Pu system—widely used in the power industry in
power flow studies to express values of quantities — is adopted in the dynamic analysis of the drive-
train as well as the electrical system in order to simplify calculations by expressing the parameters on
a common power base. These are based on the following formulation:
base value in pu =quantity expressed in SI units
base value. (B.1)
B.1.1 DQ Base Values
The dq system base voltage and current are taken equal to the respectiveabc instantaneous base
values:
Vb,dq =√
2Vb,abc Ib,dq =√
2Ib,abc. (B.2)
Using these definitions, the base powerSb is given by
Sb =3
2Vb,dqIb,dq (B.3)
whereas the base resistance is equal to the respectiveabcvalue
Zb,dq =Vb,dq
Ib,dq
= Zb,abc (B.4)

APPENDIX B. SUPPORTING CONCEPTS 159
B.1.2 Mechanical System
If Sb is the base power (VA),ω0 the base electrical angular velocity (rad/sec) andp the number of
poles of the generator, then the base values at the high speed side (generator-side) of the drive train
are defined as follows:
ωb =ω0
p/2the base mechanical speed, in mechanical rad/sec (B.5)
Γb =Sb
ωb
the base torque, in Nm (B.6)
Jb =Sb
0.5ω2b
=Γb
0.5ωb
the base inertia, in Nm/(rad/sec) (B.7)
Kb =Γb
ωb=
Sb
ω2b
the base stiffness coefficient, in Nm/(rad/sec) (B.8)
Db =Γb
ωb=
Sb
ω2b
the base damping coefficient, in Nm/(rad/sec) (B.9)
The low speed side (rotor-side) base quantities are calculated from the above quantities using the
gearbox ratioNgr as follows:
ω′B = Ngrω
′′B, Γb
′′ = NgrΓb′, J ′′
b = N2grJ
′b, K ′′
b = N2grK
′b and D′′
b = N2grD
′b. (B.10)
where primed and double-primed respectively are the low and high speed side base quantities.
Generally, the pu inertia values relate to the mass moments as follows:
Ht =Jtω
2b
2SbNgrp2and Hg =
Jgω2b
2SbNgrp2. (B.11)
Further, the shaft stiffness is obtained from
KS =2ω2
0Ht
ωb(B.12)
while the electrical twist angle of the shaft,θtg , is given by
dθtg
dt= ωb(ωt − ωg). (B.13)
In the aforegoing,ω0 = 2πfn, wherefn is nominal grid frequency (Hz), andωb = 2πf0, with f0 being
the mechanical drive train eigenfrequency (Hz).

APPENDIX B. SUPPORTING CONCEPTS 160
B.2 Pole-placement
For the second-order systemB(z)
A(z)=
b1z + b2
z2 + a1z + a2(B.14)
and a second-order controllerS(z)
R(z)=
s0z2 + s1z + s2
z2 + r1z + r2
(B.15)
the polynomialA(z)R(z) + B(z)S(z) becomes
(z2 + a1z + a2)(z2 + r1z + r2) + (b1z + b2)(s0z
2 + s1z + s2)
= z4 + (a1 + r1 + b1s0)z3 + r2(a2 + a1r1 + r2 + b1s1 + b2s0)z
2
+ (a2r1 + a1r2 + b1s2 + b2s1)z + (a2r2 + b2s2) . (B.16)
If the control coefficients(r1, r2, s0, s1, s2) are known the coefficients in the polynomial
A(z)R(z) + B(z)S(z) = P (z) = z4 + p1z3 + p2z
2 + p3z + p4
become
a1 + r1 + b1s0 = p1
a2 + a1r1 + r2 + b1s1 + b2s0 = p2
a2r1 + a1r2 + b1s2 + b2s1 = p3
a2r2 + b2s2 = p4
(B.17)
and the closed loop poles are found fromP (z) = 0. If the poles are specified in advance these
equations may be solved with respect to the unknown control coefficients(r1, r2, s0, s1, s2) and the
above expression in matrix form becomes
b1 0 0 1 0
b2 b1 0 a1 1
0 b2 b1 a2 a1
0 0 b2 0 a2
s0
s1
s2
r1
r2
=
p1 − a1
p2 − a2
p3
p4
(B.18)

APPENDIX B. SUPPORTING CONCEPTS 161
Having 5 unknown controller parameters and 4 equations means that an extra equation in the con-
troller parameters may be fulfilled. If integral action of the controller is specified i.e. the DC-gain of
the controller is infinite, then the following extra equation is obtained:
R(z = 1) = 0 (B.19)
or
1 + r1 + r2 = 0. (B.20)
The combined pole-placement controller with integral action then becomes the solution to
b1 0 0 1 0
b2 b1 0 a1 1
0 b2 b1 a2 a1
0 0 b2 0 a2
0 0 0 1 1
s0
s1
s2
r1
r2
=
p1 − a1
p2 − a2
p3
p4
−1
. (B.21)
For the DC-gain, consider the system:
Y (z) =b1z + b2
z2 + a1z + a2
(B.22)
that has the discrete time realization
y(k + 2) + a1y(k + 1) + a2y(k) = b1u(k + 1) + b2u(k). (B.23)
If the system is assumed stable then a constant inputu(k) = u0 will after a while lead to a constant
outputy(k) = y0 satisfying the equation
y0 + a1y0 + a2y0 = b1u0 + b2u0 (B.24)
or
y0 =b1 + b2
1 + a1 + a2
u0 (B.25)
and the DC-gain is then seen to be the value of the transfer function forz = 1.

Appendix C
List of Publications
C.1 Journal Publications
1. Endusa Billy Muhando, Tomonobu Senjyu, Atsushi Yona, Hiroshi Kinjo, and Toshihisa Fun-
abashi, 2007. “Disturbance Rejection by Dual Pitch Angle and Self-tuning Regulator for WTG
Parametric Uncertainty Compensation,”IET - Control Theory and Applications, Vol. 1, No. 5,
pp. 1431-1440, Sept. 2007. DOI:10.1049/iet-cta:20060448.
2. Endusa Billy Muhando, Tomonobu Senjyu, Naomitsu Urasaki, Atsushi Yona, Hiroshi Kinjo,
and Toshihisa Funabashi, “Gain Scheduling Control of Variable Speed WTG Under Widely
Varying Turbulence Loading,”Renewable Energy, Vol. 32, No. 14, pp. 2407-2423, 2007.
DOI:10.1016/j.renene.2006.12.011.
3. Endusa Billy Muhando, Tomonobu Senjyu, Atsushi Yona, Hiroshi Kinjo, and Toshihisa Fun-
abashi, “Regulation of WTG Dynamic Response to Parameter Variations of Analytic Wind
Stochasticity,”Wind Energy, (In Press), DOI:10:1002/we.236.
4. Endusa Billy Muhando, Tomonobu Senjyu, Hiroshi Kinjo, and Toshihisa Funabashi, “Aug-
mented LQG Controller for Enhancement of Online Dynamic Performance for WTG System,”
Renewable Energy, (In Press), DOI:10.1016/j.renene.2007.12.001.
5. Endusa Billy Muhando, Tomonobu Senjyu, Eitaro Omine, Hiroshi Kinjo, and Toshihisa Fun-
abashi, “Model Development for Nonlinear Dynamic Energy Conversion System: an Advanced
Intelligent Control Paradigm for Optimality and Reliability,”IEEJ Trans. Power and Energy,
2007. (Accepted for publication).

APPENDIX C. LIST OF PUBLICATIONS 163
6. Endusa Billy Muhando, Tomonobu Senjyu, Hiroshi Kinjo, and Toshihisa Funabashi, “Extend-
ing the Modeling Framework for Wind Generation Systems: RLS-Based Paradigm for Perfor-
mance under High Turbulence Inflow,”IEEE Trans. Energy Conversion, 2007. (Forthcoming).
7. Endusa Billy Muhando, Tomonobu Senjyu, Hiroshi Kinjo, Zachary Otara Siagi, and Toshihisa
Funabashi, “Intelligent Optimal Control of Nonlinear Wind Generating System by a Modeling-
Based Approach,”IET - Renewable Power Generation, 2007. (Accepted for publication).
8. Tomonobu Senjyu, Endusa Billy Muhando, Atsushi Yona, Naomitsu Urasaki, Hiroshi Kinjo,
and Toshihisa Funabashi, “Maximum Wind Power Capture by Sensorless Rotor Position and
Wind Velocity Estimation from Flux Linkage and Sliding Observer,”Int. Journal of Emerging
Electric Power Systems, Vol. 8, No. 2, Art. 3, pp. 1- 9, 2007.
9. Tomonobu Senjyu, Satoshi Tamaki, Endusa Billy Muhando, Naomitsu Urasaki, Hiroshi Kinjo,
Toshihisa Funabashi, Hideki Fujita, and Hideomi Sekine, “Wind Velocity and Rotor Position
Sensorless Maximum Power Point Tracking Control for WGS,”Renewable Energy, Vol. 31,
No. 11, pp. 1764-1775, 2006. DOI:10.1016/j.renene.2005.09.020.
10. Tomonobu Senjyu, Eitaro Omine, Daisuke Hayashi, Endusa Billy Muhando, Atsushi Yona,
and Toshihisa Funabashi, “Balancing Control for Dispersed Generators Considering Torsional
Torque Suppression and AVR Performance for Synchronous Generators,”IEEJ Trans. Power
and Energy, vol. 128, no. 1, pp. 75-83, 2008. (in Japanese).
—————————————————————————————————————–
11*. Endusa Billy Muhando, Hiroshi Kinjo, Eiho Uezato, Tomonobu Senjyu, and Tetsuhiko Ya-
mamoto, “Online Neurocontroller Design Optimized by a Genetic Algorithm for a Multi-trailer
System,”Journal of the Society of Instrument and Control Engineers (SICE), Vol. 42, No. 9,
pp. 1017-1026, 2006.
12*. Endusa Billy Muhando, Hiroshi Kinjo, and Tetsuhiko Yamamoto, “Enhanced Performance for
Multivariable Optimization Problems by Use of Genetic Algorithms with Recessive Gene Struc-
ture,” Artificial Life & Robotics - Springer Japan, Vol. 10, No. 1, pp. 11-17, 2006.
DOI:10.1007/s10015-005-0355-7.
* Not related to PhD research work presented in the Thesis.

APPENDIX C. LIST OF PUBLICATIONS 164
C.2 Journal Papers under Peer Review
1. Endusa Billy Muhando, Tomonobu Senjyu, Hiroshi Kinjo, and Toshihisa Funabashi, “Stochas-
tic Inequality Constrained Closed-loop Model-based Predictive Control of MW-Class Wind
Generating System in the Electric Power Supply,”IET Procs. Renewable Power Generation
2. Endusa Billy Muhando, Tomonobu Senjyu, Hiroshi Kinjo, and Toshihisa Funabashi, “Model
Fidelity Prerequisites for Individual Blade Pitch Regulation of Wind Generating System with
State-Feedback Control,”IEEE Trans. Energy Conversion
—————————————————————————————————————–
3*. Endusa Billy Muhando, Hiroshi Kinjo, Tomonobu Senjyu, Tetsuhiko Yamamoto, and Toshihisa
Funabashi, “Multi-trailer Back-up Conundrum Revisited: LQR for Control Load Mitigation on
Neurocontroller,”Automatica
* Not related to PhD research work presented in the Thesis.

APPENDIX C. LIST OF PUBLICATIONS 165
C.3 Conference Papers: Presented
1. Endusa Billy Muhando, Tomonobu Senjyu, and Hiroshi Kinjo, “Disturbance Rejection by Stochas-
tic Inequality Constrained Closed-loop Model-Based Predictive Control of MW-Class Wind
Generating System,”Presented at the IEEJ-IEICE Joint Conference 2007), University of the
Ryukyus, Okinawa, Japan, 19 Dec. 2007.
2. Endusa Billy Muhando, Tomonobu Senjyu, Otara Zachary Siagi, and Toshihisa Funabashi, “In-
telligent Optimal Control of Wind Power Generating System by a Complemented LQG Ap-
proach,”Presented at the IEEE-Power Engineering Society Conference & Exhibition (Power-
africa2007), Johannesburg, South Africa, 16-20 July 2007.
3. Endusa Billy Muhando, Tomonobu Senjyu, Atsushi Yona, Hiroshi Kinjo, and Toshihisa Fun-
abashi, “RLS-Based Self-Tuning Regulator for WTG Dynamic Performance Enhancement Un-
der Stochastic Setting,”Presented at the International Conference on Electrical Engineering
(ICEE 2007), Hong Kong, 8-12 July 2007.
4. Endusa Billy Muhando, Tomonobu Senjyu, Atsushi Yona, and Hiroshi Kinjo, “Evolutionary
Intelligent Control of Wind Turbines for Optimized Performance and Reliability,”Presented
at the IEEE-Power Engineering Society General Meeting 2007, Tampa, FL. USA, 24-28 June
2007.
5. Endusa Billy Muhando, Tomonobu Senjyu, Naomitsu Urasaki, Atsushi Yona, and Toshihisa
Funabashi, “Robust Predictive Control of Variable-Speed Wind Turbine Generator by Self-
Tuning Regulator,”Presented at the IEEE-Power Engineering Society General Meeting 2007,
Tampa, FL. USA, 24-28 June 2007.
6. Endusa Billy Muhando, Tomonobu Senjyu, Naomitsu Urasaki, Hiroshi Kinjo, and Toshihisa
Funabashi, “Online WTG Dynamic Performance and Transient Stability Enhancement by Evo-
lutionary LQG,” Presented at the IEEE-Power Engineering Society General Meeting 2007,
Tampa, FL. USA, 24-28 June 2007.
7. Tomonobu Senjyu, Yasutaka Ochi, Endusa Billy Muhando, Naomitsu Urasaki, and Hideomi
Sekine, “Speed and Position Sensorless Maximum Power Point Tracking Control for WGS with
Squirrel Cage Induction Generator,”Presented at the IEEE-Power Engineering Society Power
Systems Conference & Exposition (PSCE’06), Atlanta, GA. USA, 29 Oct.–01 Nov. 2006.

APPENDIX C. LIST OF PUBLICATIONS 166
C.4 Conference Papers: Scheduled
1. Endusa Billy Muhando, Tomonobu Senjyu, Eitaro Omine, Yuri Yonaha, and Toshihisa Fun-
abashi, “Steady-state and Transient Dynamic Response of Grid-Connected WECS with Asyn-
chronous DOIG by Predictive Control under Turbulent Inflow,”To be presented at the IEEE-
Power Engineering Society General Meeting, Pittsburg, Pennsylvania, USA, 20–24 July 2008.
2. Endusa Billy Muhando, Tomonobu Senjyu, Eitaro Omine, and Toshihisa Funabashi, “Full State
Feedback Digital Control of WECS with State Estimation by Stochastic Modeling Design,”To
be presented at the IEEE-Power Engineering Society General Meeting, Pittsburg, Pennsylvania,
USA, 20–24 July 2008.
3. Endusa Billy Muhando, Tomonobu Senjyu, and Toshihisa Funabashi, “Model Fidelity Prereq-
uisites for Variable Speed Pitch-Regulated WECS with State-Feedback Control,”To be pre-
sented at the IEEE International Symposium on Industrial Electronics (ISIE 2008), Cambridge,
UK, 30 June–02 July 2008.
4. Endusa Billy Muhando, Tomonobu Senjyu, Hideomi Sekine, and Toshihisa Funabashi, “In-
dividual Blade Pitch Regulation for Variable Speed Wind Energy Conversion System with
State-Feedback Control,”To be presented at the IEEJ Power Engineering Society Conference
(PES’08), Hiroshima, Japan, 24–26 September, 2008.
C.5 Conference Papers: Other
1. Hiroshi Kinjo, Endusa Billy Muhando, Kunihiko Nakazono, Eiho Uezato, and Tetsuhiko Ya-
mamoto, “Real-time Design and Control of Multi-trailer System Using Neurocontroller Opti-
mized by a Genetic Algorithm,”Presented at the 9th International Conference on Mechatronics
Technology (ICMT 2005), Kuala Lampur, Malaysia, 5-8 Dec. 2005










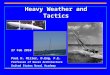



![THE GEORGE WASHINGTON UNIVERSITY School of Engineering … · 2019-11-14 · Doctor of Engineering Program Overview T he online Doctor of Engineering programinengineeringmanagement[D.Eng.(EM)]](https://img.pdfslide.net/doc/110x75/5ea8400d09caa17d1a2e7d93/the-george-washington-university-school-of-engineering-2019-11-14-doctor-of-engineering.jpg)