Embed Size (px)
Citation preview

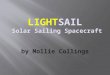
Design and Simulation of the Attitude Determination and Control System for
LightSail-1
Matt Nehrenz

LightSail-1 Overview
• LightSail-1 is made up of a 3U CubeSat– 10 x 10 x 34 cm, <5kg
• LightSail-1 will deploy a 32m^2 aluminized Mylar sail via 4m booms
• LightSail-1 will demonstrate controlled flight by Light
LightSail-1 with deployed sail
Avionics Module
Sail Storage Section
Boom Deployer
Payload Section

ADCS Introduction
Sensors:• Magnetometers• Sun Sensors• Gyroscopes
Actuators:• Torque Rods• Momentum Wheel
Key Requirements:• Point at sun with 10º accuracy• Accomplish orbit raising
Magnetometers
Momentum WheelGyros
Torque Rods
Sun Sensors

ADCS Sensors
Magnetometers Sun Sensors
ELMOS Semiconductor
E910.86
• 2 axis• 150º field of view• 2.7º resolution• +/- 5º accuracy• 4 x 4 mm
Gyroscopes
Analog DevicesADIS16135
• 1 axis• Temp calibrated• 0.0017 º/sec bias stability• 0.012 º/sec resolution• 44 x 36 x 14 mm
Honeywell HMC1051
• 1 axis• -6 to +6 Gauss range• 120 μGauss resolution• 2 x 2 x 7 mm

ADCS Actuators
Torque Rods Momentum Wheel• Sinclair microsatellite reaction
wheel• Nominal momentum: 0.050
Nms• Dimensions: 75 mm x 65 mm x
38 mm• Mass: 225 g
• Stras Space Torque Rod• 1 Am2 magnetic dipole• Dimensions: 90 mm long x 22 mm
diameter• Mass: 150 g• Power consumption: 500 mW

ADCS Torque Comparison
• Want an orbit altitude where aerodynamic force is ~10x less than the solar force
• With 822 km orbit, worst case aero torque is half of solar torque
• Graph assumes 3 cm CP/CG offset

ADCS Modes
• B-dot detumble• Momentum wheel turn-on• Sun-pointing• Orbit raising (thrust on/thrust off)
• Assumptions for MatLab simulations:– Rigid body
– Body axes are the principal axes
– IGRF-10 magnetic field model
– Disturbance torques: gravity gradient, solar, and aerodynamic torque
– Sensor noise included, but sensor misalignment excluded
– Momentum wheel spins at constant rate

ADCS Modes: B-dot Detumble
• Only sensors used are magnetometers• B-dot algorithm applies a magnetic dipole that minimizes the change
in the magnetic field
BKM
System Cycle Time: 10 seconds

ADCS Modes: Wheel Spin-Up
• Sinclair microsatellite reaction wheel• Nominal momentum: 0.050 Nms• When spun up, an angular velocity of 2.5 deg/sec will be imparted
on the spacecraft which will require a second detumble mode.• Wheel is needed for orbit raising mode

ADCS Modes: Sun-Pointing
+Z
• +Z axis points towards sun
• Sensors used:• Magnetometers• Sun sensors• Rate gyroscopes
• Full hemispherical coverage without any reflection off the solar panels or solar sail

ADCS Modes: Sun-Pointing
• Calculate a requested torque from Control Law
• θ - a vector of angle measures that is a function of the sun vector in body coordinates and the desired sun-pointing axis (+Z)
• Solve for magnetic dipole needed to achieve requested torque
Total Torque
Control Law
Spacecraft Dynamics
Disturbance Torques
com
e
e
com
CT
Control Torque
DT
T
Feedback
eDePreq KKT
2
reqreq
B
TBM

ADCS Modes: Sun-Pointing
Parameter Value
Spacecraft mass
5 kg
Deployed inertias (kg·m2)
Ixx = 1.4Iyy = 1.4Izz = 2.8
Orbit 822 km sun-sync
System cycle 10 sec
Wheel momentum
0.050 N·m·sec
Max magnetic dipole
1 A·m2
Max power consumption
< 3 watts
Sun-pointing error over ~4 orbits
(shaded areas are eclipses)

Solar Pressure
Orbit Direction
Orbit Direction
90 degree pitch
maneuver
Thrust On
Thrust Off
ADCS Modes: Orbit Raising

ADCS Modes: Orbit Raising
• Nominal wheel speed is changed 1000 RPM (20%)
• 90º maneuver takes 4 minutes
• Wheel is the only active actuator during maneuver
• Slew rate and time verified by hand calculations

ADCS Hardware Failure Scenarios
• System can be commanded into various settings due to:– Critical hardware failure– Convergence issues
• System will autonomously try to recognize failures and resolve the issue automatically
• Ground will have the ability to:– Restart nominal control sequence– Control wheel speed– Change control gains for detumble mode– Change control gains for sun-pointing mode– Decide which torquers to use in case of torquer failure
• Torquer Failure– Torquer failure is evident by a short or by zero current flow
• Stop torquing• Report problem and wait for ground command
– Simulation shows B-dot is feasible with a single torquer out

ADCS Hardware Failure Scenarios
• Sun sensor failure– When sun is in view of multiple sensors, system will take an average and
compare readings– If comparison of multiple readings show that a sensor is bad
• Log data point• Don’t use that sensor for that point and move on
– If there are 3 consecutive bad readings from single sensor• Discontinue use of bad sensor• Report sensor failure to ground
• Magnetometer failure– If magnetometer reading magnitude is out of bounds or in disagreement with
running average• Log data point• Skip that iteration of the control algorithm and try again
– If there are 3 consecutive bad readings from single sensor• Discontinue use of bad sensor• Report sensor failure to ground

ADCS Hardware Failure Scenarios
• Gyro failure– If gyro reading is inconsistent with running average
• Log data point• Skip that iteration of the control algorithm and try again
– If there are 3 consecutive bad readings from single gyro• Exit sun-pointing mode• Run B-dot• Report problem and wait for ground command
• Momentum wheel failure– If wheel speed feedback is inconsistent with commanded speed, or if adverse
health status• Turn off wheel• Run B-dot• Report Problem and wait for ground command
– If wheel is off, gains will be changed so that B-dot and sun-pointing will be possible

ADCS – Test/Analysis Status
• Test gyro capability– Take stationary gyro readings
over long time periods to characterize bias stability
– Spin table tests
• Processor in the Loop Tests– Interface MatLab simulation
with actual flight processor and flight code
– System dynamics, environment, attitude knowledge, and control actuation simulated in MatLab
– Processor reads in simulated sun sensor, gyro, and magnetometer data and calculate a dipole for the torquers to produce

Questions?


























![Libraries] Function of Attitude Similarity and Attitude](https://img.pdfslide.net/doc/110x75/62e4a200fe037104c8733690/libraries-function-of-attitude-similarity-and-attitude-.jpg)