Embed Size (px)
Citation preview

PosidoniaPosidonia
Detailed Posidonia oceanica (L.) Delile mapping using MDM (Microcartography Diving Method)
Andrea PEIRANO*Sergio SGORBINISilvia COCITOMassimo MORGIGNI
ENEA Marine Environment Research Centre P.O.Box 224, 19100 La Spezia, Italy

The Microcartography Diving Method is based on the GIB (GPS Intelligent Buoy) portable tracking system.
An acoustic transmitter (pinger) synchronized with the GPS clock
4 buoys located by the GPS
A radio link from the buoys to the deck unit
An acoustic link from the pinger to the buoys
A control station that centralizes all data received from the buoys and the DGPS system
A diver equiped with an underwater scooter, the pinger and a system useful to follow the limit of the Posidonia meadow.
32 KHzPinger
Underwater scooter
pvc tablet

The GIB priciple is based on measurement of distances between an underwater acoustic trasmitter and a network of drifting or moored buoys.
Acoustic link
Radio network

Every second, the pinger transmits one pulse, synchronous to the GPS clock.
Each buoy measures the GPS time of arrival of the signal and transmits this information together with its own D-GPS position to the Control and Display Unit (radio link). For each acoustic pulse, the travel time, from the pinger to the buoys, is directly converted to the pinger/buoy distance, known the sound velocity.
The position of the acoustic source is given by triangulation method in WGS-84 coordinates.

The ENEA system, based on 32 KHz acoustic
frequency transmitter, covers a 7 Km2 area
with 4 buoys moored in a square with
800 meters per side.
32 KHzPinger
underwater scooter
pvc tablet
PosidoniaPosidonia

PosidoniaPosidonia
The system was tested during the Interreg3B-Posidonia project (European Community) in two sites in the Ligurian Sea (NW Mediterranean): Imperia (Italy) and Saint Raphael (France).
At Imperia the precision of the method was tested performing a comparison between the positioning data collected by two divers along a fixed path 50 m long and marked by nine fixed poles.
At St. Raphael the method was used to track the deep limit of a P. oceanica meadow at 32 m of depth in a protected area.

PosidoniaPosidonia

PosidoniaPosidonia
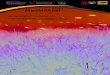
IMPERIA - Posidonia oceanica mapping from pole 1 to pole 9
-35
-30
-25
-20
-15
-10 -5 0 5 10 15 20 25 30 35m
m
1
2
3
4
56
7 8 9

PosidoniaPosidonia
POLE N.1
-35
-34.5
-34
-33.5
-33
-8 -7.5 -7 -6.5
POLE N. 2
-30.8
-30.3
-29.8
-4.5 -4 -3.5 -3
POLE N.3
-27.3
-26.8
-26.3
-1.5 -1 -0.5 0
POLE N. 4
-24
-23.5
-23
-22.5
2 2.5 3
POLE N. 5
-20
-19.5
-19
12 12.5 13 13.5
POLE N. 6
-19.5
-19
-18.5
-18
-17.5
16.1 16.6 17.1POLE N. 7
-17.2
-16.7
-16.2
-15.7
21.5 22 22.5
POLE N. 8
-17
-16.5
-16
28 28.5 29
POLE N. 9
-18.3
-17.8
-17.3
31.7 32.2 32.7 33.2
IMPERIA - Posidonia oceanica mapping from pole 1 to pole 9
-35
-30
-25
-20
-15
-10 -5 0 5 10 15 20 25 30 35m
m
1
23
4
56
7 8 9

PosidoniaPosidonia
Deep limit of the Posidonia oceanica meadowSt. Raphael - France
0
100
-400 -300 -200 -100 0 100 200m
m
Nord
West
East

PosidoniaPosidonia
- Time required to deploy the system: 20 minutes
- Mapping Speed: 1 km of limit per hour of diving bottom time
- Mapping Scale: < 1: 500
- Precision: < 50 cm
- Depth: from 4 to > 35 m
CONCLUSIONS

PosidoniaPosidonia
http://www.santateresa.enea.it/wwwste/posidonia/index.html














![Lack of Impact of Posidonia oceanica Leaf Nutrient ...Introduction In the Western Mediterranean, seagrass meadows are dominated by Posidonia oceanica (L.) Delile [1,2] where the fish](https://img.pdfslide.net/doc/110x75/5e36a23aece3670988495fb0/lack-of-impact-of-posidonia-oceanica-leaf-nutrient-introduction-in-the-western.jpg)