Embed Size (px)
Citation preview

Deterministic ModelsPerfect foresight, nonlinearities and occasionally binding constraints
Sébastien Villemot
June 12, 2018
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 1 / 72

Introduction
Perfect foresight = agents perfectly anticipate all future shocksConcretely, at period 1:
I agents learn the value of all future shocks;I since there is shared knowledge of the model and of future shocks,
agents can compute their optimal plans for all future periods;I optimal plans are not adjusted in periods 2 and later⇒ the model behaves as if it was deterministic.
Cost of this approach: the effect of future uncertainty is not takeninto account (e.g. no precautionary motive)Advantage: numerical solution can be computed exactly (up torounding errors), contrarily to perturbation or global solution methodsfor rational expectations modelsIn particular, nonlinearities fully taken into account (e.g. occasionallybinding constraints)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 2 / 72

Outline
1 Presentation of the problem
2 Solution techniques
3 Shocks: temporary/permanent, unexpected/pre-announced
4 Occasionally binding constraints
5 More unexpected shocks, extended path
6 Dealing with nonlinearities using higher order approximation ofstochastic models
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 3 / 72

Outline
1 Presentation of the problem
2 Solution techniques
3 Shocks: temporary/permanent, unexpected/pre-announced
4 Occasionally binding constraints
5 More unexpected shocks, extended path
6 Dealing with nonlinearities using higher order approximation ofstochastic models
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 4 / 72

The (deterministic) neoclassical growth model
max{ct}∞t=1
∞∑t=1
βt−1 c1−σt
1− σs.t.
ct + kt = Atkαt−1 + (1− δ)kt−1
First order conditions:
c−σt = βc−σt+1
(αAt+1kα−1
t + 1− δ)
ct + kt = Atkαt−1 + (1− δ)kt−1
Steady state:
k =(1− β(1− δ)
βαA
) 1α−1
c = Akα − δk
Note the absence of stochastic elements!No expectancy term, no probability distribution
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 5 / 72

Dynare code (1/3)rcb_basic.mod
var c k;varexo A;parameters alpha beta gamma delta;
alpha=0.5;beta=0.95;gamma=0.5;delta=0.02;
model;c + k = A*k(-1)^alpha + (1-delta)*k(-1);c^(-gamma) = beta*c(+1)^(-gamma)*(alpha*A(+1)*k^(alpha-1) +
1 - delta);end;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 6 / 72

Dynare code (2/3)rcb_basic.mod
// Steady state (analytically solved)initval;A = 1;k = ((1-beta*(1-delta))/(beta*alpha*A))^(1/(alpha-1));c = A*k^alpha-delta*k;
end;
// Check that this is indeed the steady statesteady;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 7 / 72

Dynare code (3/3)rcb_basic.mod
// Declare a positive technological shock in period 1shocks;var A;periods 1;values 1.2;
end;
// Prepare the deterministic simulation over 100 periodsperfect_foresight_setup(periods=100);
// Perform the simulationperfect_foresight_solver;
// Display the path of consumptionrplot c;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 8 / 72

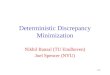
Simulated consumption path
0 20 40 60 80 1005.9
5.95
6
6.05
6.1
Periods
Plot of c
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 9 / 72

The general problem
Deterministic, perfect foresight, case:
f (yt+1, yt , yt−1, ut) = 0
y : vector of endogenous variablesu : vector of exogenous shocks
Identification rule: as many endogenous (y) as equations (f )
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 10 / 72

Return to the neoclassical growth model
yt =(
ctkt
)
ut = At
f (yt+1, yt , yt−1, ut) =(
c−σt − βc−σt+1
(αAt+1kα−1
t + 1− δ)
ct + kt − Atkαt−1 + (1− δ)kt−1
)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 11 / 72

What if more than one lead or one lag?
A model with more than one lead or lag can be transformed in theform with one lead and one lag using auxiliary variablesTransformation done automatically by DynareFor example, if there is a variable with two leads xt+2:
I create a new auxiliary variable aI replace all occurrences of xt+2 by at+1I add a new equation: at = xt+1
Symmetric process for variables with more than one lagWith future uncertainty, the transformation is more elaborate (butstill possible) on variables with leads
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 12 / 72

Steady state
A steady state, y , for the model satisfies
f (y , y , y , u) = 0
Note that a steady state is conditional to:I The steady state values of exogenous variables uI The value of parameters (implicit in the above definition)
Even for a given set of exogenous and parameter values, some(nonlinear) models have several steady statesThe steady state is computed by Dynare with the steady commandThat command internally uses a nonlinear solver
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 13 / 72

A two-boundary value problem
Stacked system for a perfect foresight simulation over T periods:f (y2, y1, y0, u1) = 0f (y3, y2, y1, u2) = 0
...f (yT+1, yT , yT−1, uT ) = 0
for y0 and yT+1 given.
Compact representation:F (Y ) = 0
where Y =[
y ′1 y ′2 . . . y ′T]′
and y0, yT+1, u1 . . . uT are implicit
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 14 / 72

Solution of perfect foresight models
This technique numerically computes trajectories for given shocksover a finite number of periodsNo possibility of computing a recursive policy function (as withperturbation methods), because future shock paths are statevariables, and those are infinite-dimensional objectsHowever, it is possible to approximate the asymptotic return toequilibrium with yT+1 = y and a large enough TResolution uses a Newton-type method on the stacked system
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 15 / 72

Outline
1 Presentation of the problem
2 Solution techniques
3 Shocks: temporary/permanent, unexpected/pre-announced
4 Occasionally binding constraints
5 More unexpected shocks, extended path
6 Dealing with nonlinearities using higher order approximation ofstochastic models
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 16 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (unidimensional)
Copyright © 2005 Ralf Pfeifer / Creative Commons Attribution-ShareAlike 3.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 17 / 72

The Newton method (multidimensional)
Start from an initial guess Y (0)
Iterate. Updated solutions Y (k+1) are obtained by solving a linearsystem:
F (Y (k)) +[∂F∂Y
] (Y (k+1) − Y (k)
)= 0
Terminal condition:
||Y (k+1) − Y (k)|| < εY
or||F (Y (k))|| < εF
Convergence may never happen if function is ill-behaved or initialguess Y (0) too far from a solution⇒ to avoid an infinite loop, abort after a given number of iterations
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 18 / 72

Controlling the Newton algorithm from Dynare
The following options to the perfect_foresight_solver can be used tocontrol the Newton algorithm:
maxit Maximum number of iterations before aborting (default: 50)tolf Convergence criterion based on function value (εF ) (default:
10−5)tolx Convergence criterion based on change in the function
argument (εY ) (default: 10−5)stack_solve_algo select between the different flavors of Newton
algorithms (see thereafter)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 19 / 72

A practical difficulty
The Jacobian can be very large: for a simulation over T periods of amodel with n endogenous variables, it is a matrix of dimension nT × nT .
Three alternative ways of dealing with the large problem size:Exploit the particular structure of the Jacobian using a relaxationtechnique developped by Laffargue, Boucekkine and Juillard (was thedefault method in Dynare ≤ 4.2)Handle the Jacobian as one large, sparse, matrix (now the defaultmethod)Block decomposition, which is a divide-and-conquer method,implemented by Mihoubi
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 20 / 72

Shape of the Jacobian
∂F∂Y =
B1 C1A2 B2 C2
. . . . . . . . .At Bt Ct
. . . . . . . . .AT−1 BT−1 CT−1
AT BT
where
As = ∂f∂yt−1
(ys+1, ys , ys−1)
Bs = ∂f∂yt
(ys+1, ys , ys−1)
Cs = ∂f∂yt+1
(ys+1, ys , ys−1)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 21 / 72

Relaxation (1/5)
The idea is to triangularize the stacked system:
B1 C1A2 B2 C2
. . . . . . . . .. . . . . . . . .
AT−1 BT−1 CT−1AT BT
∆Y = −
f (y2, y1, y0, u1)f (y3, y2, y1, u2)
...
...f (yT , yT−1, yT , uT−1)f (yT+1, yT , yT−1, uT )
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 22 / 72

Relaxation (2/5)
First period is special:
I D1B2 − A2D1 C2
A3 B3 C3. . . . . . . . .
AT−1 BT−1 CT−1AT BT
∆Y = −
d1f (y3, y2, y1, u2) + A2d1
f (y4, y3, y2, u3)...
f (yT , yT−1, yT , uT−1)f (yT+1, yT , yT−1, uT )
where
D1 = B−11 C1
d1 = B−11 f (y2, y1, y0, u1)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 23 / 72

Relaxation (3/5)
Normal iteration:
I D1I D2
B3 − A3D2 C3. . . . . . . . .
AT−1 BT−1 CT−1AT BT
∆Y = −
d1d2
f (y4, y3, y2, u3) + A3d2...
f (yT , yT−1, yT , uT−1)f (yT+1, yT , yT−1, uT )
where
D2 = (B2 − A2D1)−1C2
d2 = (B2 − A2D1)−1(f (y3, y2, y1, u2) + A2d1)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 24 / 72

Relaxation (4/5)
Final iteration:
I D1I D2
I D3. . . . . .
I DT−1I
∆Y = −
d1d2d3...
dT−1dT
where
dT = (BT − AT DT−1)−1(f (yT+1, yT , yT−1, uT ) + AT dT−1)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 25 / 72

Relaxation (5/5)
The system is then solved by backward iteration:
yk+1T = yk
T − dT
yk+1T−1 = yk
T−1 − dT−1 − DT−1(yk+1T − yk
T )...
yk+11 = yk
1 − d1 − D1(yk+12 − yk
2 )
No need to ever store the whole Jacobian: only the Ds and ds have tobe storedThis technique is memory efficient (was the default method in Dynare≤ 4.2 for this reason)Still available as option stack_solve_algo=6 ofperfect_foresight_solver command
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 26 / 72

Sparse matrices (1/3)Consider the following matrix with most elements equal to zero:
A =
0 0 2.5−3 0 00 0 0
Dense matrix storage (in column-major order) treats it as aone-dimensional array:
[0,−3, 0, 0, 0, 0, 2.5, 0, 0]
Sparse matrix storage:I views it as a list of triplets (i , j , v) where (i , j) is a matrix coordinate
and v a non-zero valueI A would be stored as
{(2, 1,−3), (1, 3, 2.5)}
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 27 / 72

Sparse matrices (2/3)
In the general case, given an m× n matrix with k non-zero elements:I dense matrix storage = 8mn bytesI sparse matrix storage = 16k bytesI sparse storage more memory-efficient as soon as k < mn/2
(assuming 32-bit integers and 64-bit floating point numbers)In practice, sparse storage becomes interesting if k � mn/2, becauselinear algebra algorithms are vectorized
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 28 / 72

Sparse matrices (3/3)
The Jacobian of the deterministic problem is a sparse matrix:I Lots of zero blocksI The As , Bs and Cs usually are themselves sparse
Family of optimized algorithms for sparse matrices (including matrixinversion for our Newton algorithm)Available as native objects in MATLAB/Octave (see the sparsecommand)Works well for medium size deterministic modelsNowadays more efficient than relaxation, even though it does notexploit the particular structure of the Jacobian⇒ now the default method in Dynare (stack_solve_algo=0)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 29 / 72

Block decomposition (1/3)
Idea: apply a divide-and-conquer technique to model simulationPrinciple: identify recursive and simultaneous blocks in the modelstructureFirst block (prologue): equations that only involve variablesdetermined by previous equations; example: AR(1) processesLast block (epilogue): pure output/reporting equationsIn between: simultaneous blocks, that depend recursively on eachotherThe identification of the blocks is performed through a matchingbetween variables and equations (normalization), then a reordering ofboth
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 30 / 72

Block decomposition (2/3)Form of the reordered Jacobian (equations in lines, variables in columns)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 31 / 72

Block decomposition (3/3)
Can provide a significant speed-up on large modelsImplemented in Dynare by Ferhat MihoubiAvailable as option block to the model commandBigger gains when used in conjunction with bytecode option
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 32 / 72

HomotopyAnother divide-and-conquer method, but in the shocks dimensionUseful if shocks so large that convergence does not occurIdea: achieve convergence on smaller shock size, then use the resultas starting point for bigger shock sizeAlgorithm:
1 Starting point for simulation path: steady state at all t2 λ← 0: scaling factor of shocks (simulation succeeds when λ = 1)3 s ← 1: step size4 Try to compute simulation with shocks scaling factor equal to λ+ s
(using last successful computation as starting point)F If success: λ← λ + s. Stop if λ = 1. Otherwise possibly increase s.F If failure: diminish s.
5 Go to 4Can be combined with any deterministic solverUsed by default by perfect_foresight_solver (can be disabledwith option no_homotopy)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 33 / 72

Outline
1 Presentation of the problem
2 Solution techniques
3 Shocks: temporary/permanent, unexpected/pre-announced
4 Occasionally binding constraints
5 More unexpected shocks, extended path
6 Dealing with nonlinearities using higher order approximation ofstochastic models
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 34 / 72

Example: neoclassical growth model with investment
The social planner problem is as follows:
max{ct+j ,`t+j ,kt+j}∞j=0
Et
∞∑j=0
βju(ct+j , `t+j)
s.t.
yt = ct + ityt = At f (kt−1, `t)
kt = it + (1− δ)kt−1
At = A?eat
at = ρ at−1 + εt
where εt is an exogenous shock.
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 35 / 72

Specifications
Utility function:
u(ct , `t) =
(cθt (1− `t)1−θ
)1−τ
1− τ
Production function:
f (kt−1, `t) =(αkψt−1 + (1− α)`ψt
) 1ψ
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 36 / 72

First order conditions
Euler equation:
uc(ct , `t) = β Et[uc(ct+1, `t+1)
(At+1fk(kt , `t+1) + 1− δ
)]Arbitrage between consumption and leisure:
u`(ct , `t)uc(ct , `t) + At f`(kt−1, `t) = 0
Resource constraint:
ct + kt = At f (kt−1, `t) + (1− δ)kt−1
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 37 / 72

Dynare code (1/3)
var k, y, L, c, A, a;varexo epsilon;parameters beta, theta, tau, alpha, psi, delta, rho, Astar;
beta = 0.9900;theta = 0.3570;tau = 2.0000;alpha = 0.4500;psi = -0.1000;delta = 0.0200;rho = 0.8000;Astar = 1.0000;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 38 / 72

Dynare code (2/3)
model;a = rho*a(-1) + epsilon;A = Astar*exp(a);y = A*(alpha*k(-1)^psi+(1-alpha)*L^psi)^(1/psi);k = y-c + (1-delta)*k(-1);(1-theta)/theta*c/(1-L) - (1-alpha)*(y/L)^(1-psi);(c^theta*(1-L)^(1-theta))^(1-tau)/c =
beta*(c(+1)^theta*(1-L(+1))^(1-theta))^(1-tau)/c(+1)*(alpha*(y(+1)/k)^(1-psi)+1-delta);
end;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 39 / 72

Dynare code (3/3)
steady_state_model;a = epsilon/(1-rho);A = Astar*exp(a);Output_per_unit_of_Capital=((1/beta-1+delta)/alpha)^(1/(1-psi));Consumption_per_unit_of_Capital=Output_per_unit_of_Capital-delta;Labour_per_unit_of_Capital=(((Output_per_unit_of_Capital/A)^psi-alpha)
/(1-alpha))^(1/psi);Output_per_unit_of_Labour=Output_per_unit_of_Capital/Labour_per_unit_of_Capital;Consumption_per_unit_of_Labour=Consumption_per_unit_of_Capital
/Labour_per_unit_of_Capital;
% Compute steady state of the endogenous variables.L=1/(1+Consumption_per_unit_of_Labour/((1-alpha)*theta/(1-theta)
*Output_per_unit_of_Labour^(1-psi)));c=Consumption_per_unit_of_Labour*L;k=L/Labour_per_unit_of_Capital;y=Output_per_unit_of_Capital*k;
end;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 40 / 72

Scenario 1: Return to equilibrium
Return to equilibrium starting from k0 = 0.5k.
Fragment from rbc_det1.mod...steady;
ik = varlist_indices(’k’,M_.endo_names);kstar = oo_.steady_state(ik);
histval;k(0) = kstar/2;
end;
perfect_foresight_setup(periods=300);perfect_foresight_solver;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 41 / 72

Scenario 2: A temporary shock to TFPThe economy starts from the steady stateThere is an unexpected negative shock at the beginning of period 1:ε1 = −0.1
Fragment from rbc_det2.mod...steady;
shocks;var epsilon;periods 1;values -0.1;
end;
perfect_foresight_setup(periods=300);perfect_foresight_solver;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 42 / 72

Scenario 3: Pre-announced favorable shocks in the futureThe economy starts from the steady stateThere is a sequence of positive shocks to At : 4% in period 5 and anadditional 1% during the 4 following periods
Fragment from rbc_det3.mod...steady;
shocks;var epsilon;periods 4, 5:8;values 0.04, 0.01;
end;
perfect_foresight_setup(periods=300);perfect_foresight_solver;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 43 / 72

Scenario 4: A permanent shockThe economy starts from the initial steady state (a0 = 0)In period 1, TFP increases by 5% permanently (and this wasunexpected)
Fragment from rbc_det4.mod...initval;epsilon = 0;
end;
steady;
endval;epsilon = (1-rho)*log(1.05);
end;
steady;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 44 / 72

Scenario 5: A pre-announced permanent shock
The economy starts from the initial steady state (a0 = 0)In period 6, TFP increases by 5% permanentlyA shocks block is used to maintain TFP at its initial level duringperiods 1–5
Fragment from rbc_det5.mod...// Same initval and endval blocks as in Scenario 4...
shocks;var epsilon;periods 1:5;values 0;
end;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 45 / 72

Summary of commands
initval for the initial steady state (followed by steady)endval for the terminal steady state (followed by steady)
histval for initial or terminal conditions out of steady stateshocks for shocks along the simulation path
perfect_foresight_setup prepare the simulationperfect_foresight_solver compute the simulation
simul do both operations at the same time (deprecated syntax,alias for perfect_foresight_setup +perfect_foresight_solver)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 46 / 72

Under the hoodThe paths for exogenous and endogenous variables are stored in twoMATLAB/Octave matrices:
oo_.endo_simul = ( y0 y1 . . . yT yT+1 )oo_.exo_simul’ = ( � u1 . . . uT � )
perfect_foresight_setup initializes those matrices, given theshocks, initval, endval and histval blocks
I y0, yT+1 and u1 . . . uT are the constraints of the problemI y1 . . . yT are the initial guess for the Newton algorithm
perfect_foresight_solver replaces y1 . . . yT in oo_.endo_simulby the solutionNotes:
I for historical reasons, dates are in columns in oo_.endo_simul and in lines inoo_.exo_simul, hence the transpose (’) above
I this is the setup for no lead and no lag on exogenousI if one lead and/or one lag, u0 and/or uT+1 would become relevantI if more than one lead and/or lag, matrices would be larger
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 47 / 72

Initial guess
The Newton algorithm needs an initial guess Y (0) = [y (0)1′. . . y (0)
T′].
What is Dynare using for this?
By default, if there is no endval block, it is the steady state asspecified by initval (repeated for all simulations periods)Or, if there is an endval block, then it is the final steady statedeclared within this blockPossibility of customizing this default by manipulatingoo_.endo_simul after perfect_foresight_setup (but of coursebefore perfect_foresight_solver!)If homotopy is triggered, the initial guess of subsequent iterations isthe result of the previous iteration
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 48 / 72

Alternative way of specifying terminal conditions
With the differentiate_forward_vars option of the model block,Dynare will substitute forward variables using new auxiliary variables:
I Substitution: xt+1 → xt + at+1I New equation: at = xt+1 − xt
If the terminal condition is a steady state, the new auxiliary variableshave obvious zero terminal conditionUseful when:
I the final steady state is hard to compute (this transformation actuallyprovides a way to find it)
I the model is very persistent and takes time to go back to steady state(this transformation avoids a kink at the end of the simulation if T isnot large enough)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 49 / 72

Outline
1 Presentation of the problem
2 Solution techniques
3 Shocks: temporary/permanent, unexpected/pre-announced
4 Occasionally binding constraints
5 More unexpected shocks, extended path
6 Dealing with nonlinearities using higher order approximation ofstochastic models
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 50 / 72

Zero nominal interest rate lower bound
Implemented by writing the law of motion under the following form inDynare:
it = max{0, (1− ρi )i∗ + ρi it−1 + ρπ(πt − π∗) + εi
t
}Warning: this form will be accepted in a stochastic model, but theconstraint will not be enforced in that case!
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 51 / 72

Irreversible investmentSame model as above, but the social planner is constrained to positiveinvestment paths:
max{ct+j ,`t+j ,kt+j}∞j=0
∞∑j=0
βju(ct+j , `t+j)
s.t.
yt = ct + ityt = At f (kt−1, `t)
kt = it + (1− δ)kt−1
it ≥ 0At = A?eat
at = ρ at−1 + εt
where the technology (f ) and the preferences (u) are as above.
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 52 / 72

First order conditions
uc(ct , `t)− µt = β Et[uc(ct+1, `t+1) (At+1fk(kt , `t+1) + 1− δ)
− µt+1(1− δ)]
u`(ct , `t)uc(ct , `t) + At fl (kt−1, `t) = 0
ct + kt = At f (kt−1, `t) + (1− δ)kt−1
Slackness condition:µt = 0 and it ≥ 0
or
µt > 0 and it = 0
where µt ≥ 0 is the Lagrange multiplier associated to the non-negativityconstraint for investment.
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 53 / 72

Mixed complementarity problems
A mixed complementarity problem (MCP) is given by:I function F (x) : Rn → Rn
I lower bounds `i ∈ R ∪ {−∞}I upper bounds ui ∈ R ∪ {+∞}
A solution of the MCP is a vector x ∈ Rn such that for eachi ∈ {1 . . . n}, one of the following alternatives holds:
I `i < xi < ui and Fi (x) = 0I xi = `i and Fi (x) ≥ 0I xi = ui and Fi (x) ≤ 0
Notation:` ≤ x ≤ u ⊥ F (x)
Solving a square system of nonlinear equations is a particular case(with `i = −∞ and ui = +∞ for all i)Optimality problems with inequality constraints are naturally expressedas MCPs (finite bounds are imposed on Lagrange multipliers)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 54 / 72

The irreversible investment model in Dynare
MCP solver triggered with option lmmcp ofperfect_foresight_solver
Slackness condition described by equation tag mcp
Fragment from rbcii.mod(c^theta*(1-L)^(1-theta))^(1-tau)/c - mu =beta*((c(+1)^theta*(1-L(+1))^(1-theta))^(1-tau)/c(+1)*(alpha*(y(+1)/k)^(1-psi)+1-delta)-mu(+1)*(1-delta));
...[ mcp = ’i > 0’ ]mu = 0;
...perfect_foresight_setup(periods=400);perfect_foresight_solver(lmmcp, maxit=200);
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 55 / 72

Outline
1 Presentation of the problem
2 Solution techniques
3 Shocks: temporary/permanent, unexpected/pre-announced
4 Occasionally binding constraints
5 More unexpected shocks, extended path
6 Dealing with nonlinearities using higher order approximation ofstochastic models
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 56 / 72

Simulating unexpected shocks
With a perfect foresight solver:shocks are unexpected in period 1but in subsequent periods they are anticipated
How to simulate an unexpected shock at a period t > 1?Do a perfect foresight simulation from periods 0 to T without theshockDo another perfect foresight simulation from periods t to T
I applying the shock in t,I and using the results of the first simulation as initial condition
Combine the two simulations:I use the first one for periods 1 to t − 1,I and the second one for t to T
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 57 / 72

A Dynare example (1/2)Simulation of a scenario with:
Pre-announced (negative) shocks in periods 5 and 15Unexpected (positive) shock in period 10
From rbc_unexpected.mod:
...// Declare pre-announced shocksshocks;var epsilon;periods 5, 15;values -0.1, -0.1;
end;
perfect_foresight_setup(periods=300);perfect_foresight_solver;
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 58 / 72

A Dynare example (2/2)
// Declare unexpected shock (after first simulation!)oo_.exo_simul(11, 1) = 0.1; // Period 10 has index 11!
// Strip first 9 periods and save themsaved_endo = oo_.endo_simul(:, 1:9); // Save periods 0 to 8saved_exo = oo_.exo_simul(1:9, :);oo_.endo_simul = oo_.endo_simul(:, 10:end); // Keep periods 9 to 301oo_.exo_simul = oo_.exo_simul(10:end, :);
periods 291;perfect_foresight_solver;
// Combine the two simulationsoo_.endo_simul = [ saved_endo oo_.endo_simul ];oo_.exo_simul = [ saved_exo; oo_.exo_simul ];
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 59 / 72

Consumption path
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 60 / 72

Extended path (EP) algorithmGeneralization of the previous method, where unexpected shocks mayhappen in all periodsAt every period, compute endogenous variables by running adeterministic simulation with:
I the previous period as initial conditionI the steady state as terminal conditionI a random shock drawn for the current periodI but no shock in the future
Advantages:I shocks are unexpected at every periodI nonlinearities fully taken into account
Inconvenient: solution under certainty equivalence (Jensen inequalityis violated)Method introduced by Fair and Taylor (1983)Implemented under the command extended_path (with optionorder = 0, which is the default)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 61 / 72

Extended path in Dynare
From rbc_ep.mod:
...// Declare shocks as in a stochastic setupshocks;var epsilon;stderr 0.02;
end;
extended_path(periods=300);
// Plot 20 first periods of consumptionic = varlist_indices(’c’,M_.endo_names);plot(oo_.endo_simul(ic, 1:21));
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 62 / 72

k-step ahead extended path
Accuracy can be improved by computing conditional expectation byquadrature, computing next period endogenous variables with theprevious algorithmApproximation: at date t, agents assume that there will be no moreshocks after period t + k (hence k measures the degree of futureuncertainty taken into account)If k = 1: one-step ahead EP; no more certainty equivalenceBy recurrence, one can compute a k-step ahead EP: even moreuncertainty taken into accountDifficulty: computing complexity grows exponentially with kk-step ahead EP triggered with option order = k ofextended_path command
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 63 / 72

Outline
1 Presentation of the problem
2 Solution techniques
3 Shocks: temporary/permanent, unexpected/pre-announced
4 Occasionally binding constraints
5 More unexpected shocks, extended path
6 Dealing with nonlinearities using higher order approximation ofstochastic models
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 64 / 72

Local approximation of stochastic models
The general problem:
Et f (yt+1, yt , yt−1, ut) = 0
y : vector of endogenous variablesu : vector of exogenous shocks
with:
E(ut) = 0E(utu′t) = Σu
E(utu′s) = 0 for t 6= s
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 65 / 72

What is a solution to this problem?
A solution is a policy function of the form:
yt = g (yt−1, ut , σ)
where σ is the stochastic scale of the problem and:
ut+1 = σ εt+1
The policy function must satisfy:
Et f (g (g (yt−1, ut , σ) , ut+1, σ) , g (yt−1, ut , σ) , yt−1, ut) = 0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 66 / 72

Local approximations
g (1) (yt+1, ut , σ) = y + gy yt−1 + guut
g (2) (yt+1, ut , σ) = y + 12gσσ + gy yt−1 + guut
+ 12 (gyy (yt−1 ⊗ yt−1) + guu (ut ⊗ ut))
+ gyu (yt−1 ⊗ ut)
g (3) (yt+1, ut , σ) = y + 12gσσ + 1
6gσσσ + 12gσσy yt−1 + 1
2gσσuut
+ gy yt−1 + guut + . . .
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 67 / 72

Breaking certainty equivalence (1/2)
The combination of future uncertainty (future shocks) and nonlinearrelationships makes for precautionary motives or risk premia.
1st order: certainty equivalence; today’s decisions don’t depend onfuture uncertainty2nd order:
g (2) (yt+1, ut , σ) = y + 12gσσ + gy yt−1 + guut
+ 12 (gyy (yt−1 ⊗ yt−1) + guu (ut ⊗ ut))
+ gyu (yt−1 ⊗ ut)
Risk premium is a constant: 12gσσ
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 68 / 72

Breaking certainty equivalence (2/2)
3rd order:
g (3) (yt+1, ut , σ) = y + 12gσσ + 1
6gσσσ + 12gσσy yt−1 + 1
2gσσuut
+ gy yt−1 + guut + . . .
Risk premium is linear in the state variables:
12gσσ + 1
6gσσσ + 12gσσy yt−1 + 1
2gσσuut
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 69 / 72

The cost of local approximations
1 High order approximations are accurate around the steady state, andmore so than lower order approximations
2 But can be totally wrong far from the steady state (and may be moreso than lower order approximations)
3 Error of approximation of a solution g , at a given point of the statespace (yt−1, ut):
E (yt−1, ut) =Et f (g (g (yt−1, ut , σ) , ut+1, σ) , g (yt−1, ut , σ) , yt−1, ut)
4 Necessity for pruning
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 70 / 72

Approximation of occasionally binding constraints withpenalty functionsThe investment positivity constraint is translated into a penalty on thewelfare:
max{ct+j ,`t+j ,kt+j}∞j=0
∞∑j=0
βju(ct+j , `t+j) + h · log(it+j)
s.t.
yt = ct + ityt = At f (kt−1, `t)
kt = it + (1− δ)kt−1
At = A?eat
at = ρ at−1 + εt
where the technology (f ) and the preferences (u) are as before, and hgoverns the strength of the penalty (barrier parameter)
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 71 / 72

Thanks for your attention!
Questions?
cba Copyright © 2015-2018 Dynare TeamLicense: Creative Commons Attribution-ShareAlike 4.0
Sébastien Villemot (CEPREMAP) Deterministic Models June 12, 2018 72 / 72