Embed Size (px)
Citation preview

Digital Positioning Systems:GPS and GSM
Danny Cullenward, Matthew James, Dimitris EconomouDr. Brad Osgood, Mathematics of the Information Age

Part 1
Global System for Mobile Communications

GSM Subscriber Properties
GSM Phone and Subscriber Identity Module (SIM) card.
SIM Card contains:memory for phonebook, etc.network and country codes (depending on provider)IMSI (International Mobile Subscriber ID)Ki (personal encryption key, only known by SIM
card and mobile provider)

GSM Subscriber Equipment
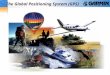
Transmitting Speech Through the GSM
([6], Page 4)

Pulse Coding Modulation (PCM)(ITUT G.711)
Patented in 1937 by British Engineer Alec H.Reeves.Samples are stored as pulses of the same amplitude as the recorded value.
In the GSM system it works as an Analog to Digital converter using 8kHz sampling with an output of 13-bits per millisecond.
Used in Compact Discs and many other technologies (higher data rate).

Illustration of PCM

Code Structure(Error Detecting Techniques)
260 Bits (20ms of sound) are broken down into three categories:
Type 1a (50 bits): Cyclical Redundancy Check (CRC) (3 bits added)Convolution Coding
Type 1b (132 bits): Convolution Coding Type II (78 bits): Left unprotected (no error correction at all)

Code Structure Diagram
G
([6], Page 6)

GSM Frequencies
Frequencies assigned to the GSM:
890-915 MHz: Uplink (mobile to base station)935-960 MHz: Downlink (base station to mobile)
These 25 MHz bands are split into 124 pairs of frequency duplex channels spaced 200 kHz apart. This method of dividing frequencies is known as Frequency Division Multiple Access (FDMA)

Time Division Multiple AccessTo further increase the number of possible subscribers using a specific base station, each of the 248 frequencies (124 pairs) is broken up into 4.615ms frames. A frame is divided into eight channels, each with a duration of 0.577ms. A single subscriber only makes use of one channel.
This process is known as Time Division Multiple Access (TDMA) and basically increases the number of subscribers that can make use of their phones at once by a factor of eight.

Interleaving(Channel Structure and Transmission)
([6], Page 4)
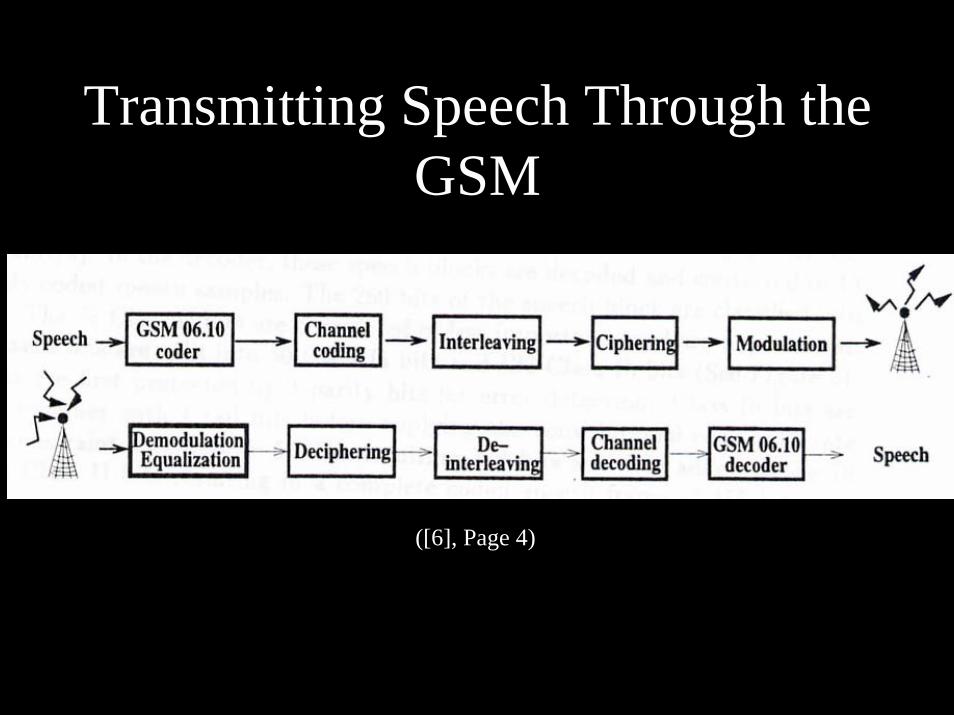
Synchronization?With channels that last 0.577 ms, one must wonder how mobiles can reach this level of synchronization with the base stations.
Given that there are no wires connecting the mobiles to the base station, the potential for overlapping of channels is presumably great.
([6], Page 4)

Synchronization Channel
One of the TDMA Channels constantly broadcasts a synchronization sequence and is thus known as a Synchronization Channel (SCH).
([1], Page 25)

Encryption:Safety and Privacy
Three different encryption algorithms:
A3: Used to authenticate user (Uses IMSI, Ki, and random sequence)
A5: Used to encrypt/decrypt communications(Uses IMSI and Kc)
A8: Used to establish a communication sessionencryption key.(Uses IMSI, Ki, and random sequence)
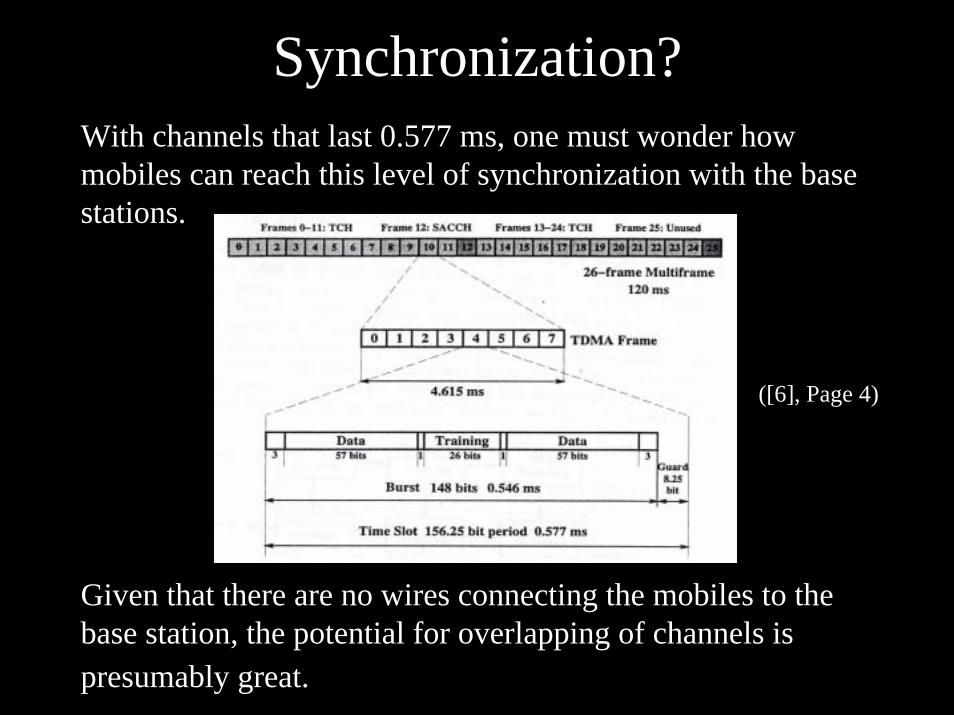
Encryption Schemes
([7], Page 18) ([7], Page 25)
Mobile User Authentication Session Encryption

Gaussian Minimum Shift Keying Modulation
The data is finally transmitted to the base station using a typeof two-level digital FM modulation known as Gaussian Minimum Shift Keying (GMSK).
This form of modulation was specifically invented by the Council on Science and Technology (COST) for the GSM system.
It allows for a transmission rate of 270 kb/s with low susceptibility to noise and interference which allows for the existence of the TDMA channels. ([2], Pages 53, 54)

Decoding
Decoding a signal and converting it back to speech is essentially all the processes described in reverse except for the error-detection scheme.
When an error is detected in the CRC of the Type Ia bits, it is not corrected but rather the bits are dumped and the sound produced is an extrapolation of the previous burst of bits.

GSM Positioning ServicesPositioning is accomplished through a process known as triangulation which basically determines the distance of your mobile from three base stations depending on signal strength. The intersection of three circles with the calculated radii is the estimated position of your mobile phone or terminal.
Precision: ~60 meters(varies greatly)
4
2
1~
1~
rP
rP
Urban
Rural
2
1~r
PRural
4
1~r
PUrban
Transmitter
Estimated mobile location
r1
r2r3

GSM SourcesBooks and Technical Reports:
[1] Eberspacher, Jorg and Hans-Jorg Vogel. GSM Switching,Services and Protocols. West Sussex: J. Wiley & Sons, Ltd., 1999.
[2] Harte, Lawrence and Richard Levine. GSM Superphones. New York: McGraw-Hill, 1999.
[3] Nudd, G.R. and M.S.Ryan. “The Viterbi Algorithm.” Coventry, U.K: University of Warwick, 1993.
[4] Tisal, Joachim. GSM Cellular Radio Telephony. West Sussex: J. Wiley, 1995.[5] Tisal, Joachim. The GSM Network: GPRS Evolution. West Sussex: J. Wiley,
2001.[6] Turletti, Thierry. “A Brief Overview of the GSM Radio Interface.” Cambridge,
Massachusetts: MIT Laboratory for Computer Science, 1996.
European Telecommunications Standards Institute:[7] GSM 03.20 v/8.1.0: GSM Encryption Algorithms[8] GSM 06.10 v/8.2.0: Full Rate Speech Transcoding[9] ETR 278: GSM cipher algorithm A5/2

Part 2Global Positioning System

What is GPS?
• A Network of 24 Satellites• Consisting of 6 orbitals of 4 satellites• A world wide ground control/monitoring
network– Monitors health and status of satellites

Background
• In the 1960’s the National Aeronautics and Space Administration (NASA) and the Department of Transportation (DOT) were interested in developing a satellite system for position determination.

Satellite Orbits
Optimum System
• Global Coverage• Continuous/All weather operation• Ability to serve high-dynamic platforms
– Plane and objects the move very fast• High accuracy

How Does GPS Work?
Basics
• 3 Satellites determine the distance to the user and create 3 spheres triangulating on the position.
• The overlap in the spheres is where the user most likely lies.

Accuracy
• By using the information from more satellites the accuracy increases.
• In general four are used.– Three for position– And the forth to correct for time errors

Finding User Position
• ρk = [(xk – xu)2 + (yk – yu)2 + (zk – zu)2]1/2 + bu
– ρk = the distance between the user and the satellite
– (xk,yk,zk ) = position of satellite k– (xu,yu,zu) = position of the user– bu = user clock bias error

Solution of User Position• δρi = (xi – xu)δxu + (yi – yu)δyu + (zi – zu)δz
ρi – bu
• [δρ1 = [α11 α12 α13 1 [δxuδρ2 α21 α22 α23 1 δyuδρ3 α31 α32 α33 1 δzuδρ4] α41 α42 α43 1] δbu]
• αi1 = xi – xu αi2 = yi – yu αi3 = zi – zuρi – bu ρi – bu ρi – bu

Yet More
• In general, matrix form:• δρ = αδx • δx = [αTα]-1αTδρ• Solve for each x, y, z, b (time).

Example of GPS

Complications
• The time difference between the user’s GPS device and the satellites internal clock (atomic).
• The earth’s non-spherical shape – complicated equations correct for eccentricity of planet.
• The atmosphere causes a code delay but a phase advance.
• Satellite orbits are not ideal and must be incorporated.

Measured Pseudorange• General and ideal case: ρit = c(tu – tsi)
– ρit = True value of pseudorange;
• ρi = ρit + ∆Di – c(∆bi – but) + c(∆Ti + ∆Ii + vi + ∆vi)– ρi = Measured value of pseudorange;– ∆Di = Satellite position error effect; – ∆bi = Satellite clock error; – but = User clock error; – ∆Ti = Tropospheric delay; – ∆Ii = Ionospheric delay; – vi = Receiver measurement noise error; – ∆vi = Relativistic time correction

Ionospheric Delay Corrections
• Two carrier frequencies are used by the GPS system.
• Two frequency users can measure the ionospheric delay since this delay is related by a scale factor to the difference in signal time of arrival (TOA) for the two carrier frequencies.
• Single frequency users must estimate the ionospheric delay using modeling parameters that are broadcast to the user.
Two Kinds of GPS
• Standard Positioning System– SPS uses C/A coding to accept a certain degree
of uncertainty for security reasons.– For civilian and general populous use.
• Precise Positioning System– PPS also uses P(Y) coding to correct for
intentionally introduced errors.– For use only by the military.

GPS Satellite Signals
Transmitting
• Three methods are used during transmission of a signal.– Frequency Assignment (L1, L2)– Modulation Format (Adding signals)– Pseudorandom Noise (PRN) Codes

Frequency Assignment
• Transmits two carrier frequencies:– L1 = 1575.42 MHz– L2 = 1227.6 MHz
• All the satellites use the same two frequencies.

SPS vs PPS
• PPS accuracy– 22m in the horizontal– 27.7m vertical plane– 200nsec
• Any number of available satellites may be used to increase the accuracy.
• Uses both L1 and L2 carrier frequencies.
• SPS accuracy– 100m in the Horizontal– 156m in the Vertical– 340nsec
• Limitations are put on the number of satellites that can be used at one time.
• Uses only L1 carrier frequency.

Modulation and PRN
• The frequencies are modulated by spread spectrum codes with a unique PRN sequence associated with each Space Vehicle (SV).
• Each SV is assigned a unique PRN code and all of the PRN code sequences are nearly uncorrelated with respect to each other.

Detecting a Signal
• The SV signals can be separated and detected by a technique called Code Division Multiple Access (CDMA), which essentially reverses the signal into its coded components.







![GPS [ Global Positioning System ]](https://img.pdfslide.net/doc/110x75/5594407a1a28abde5b8b483f/gps-global-positioning-system-.jpg)