Embed Size (px)
Citation preview

DISEÑO DE UN SISTEMA DE CONTROL DE VUELO DE UN BLIMP
MARÍA CAROLINA PATIÑO REYES
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
BOGOTÁ
2005

DISEÑO DE UN SISTEMA DE CONTROL DE VUELO DE UN BLIMP
MARÍA CAROLINA PATIÑO REYES Código: 200227122
ASESOR
ALAIN GAUTHIER SELLIER, Ph. D.
Profesor Titular
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
BOGOTÁ
2005

IEM-II-10-04
i
TABLA DE CONTENIDO
TABLA DE CONTENIDO............................................................................................................ i LISTA DE FIGURAS................................................................................................................. i i i AGRADECIMIENTOS.................................................................................................................v 1 INTRODUCCIÓN................................................................................................................ 1 2 MODELO MATEMÁTICO DEL BLIMP.................................................................................. 3
2.1 Sistemas de referencia .................................................................................................. 4 2.2 Carena y modos de vuelo del dirigible............................................................................. 5
2.2.1 Vuelo aerostático............................................................................................... 5 2.2.2 Vuelo aerodinámico........................................................................................... 5 2.2.3 Vuelo de crucero............................................................................................... 6
2.3 Estudio de la cinemática del blimp.................................................................................. 6 2.4 Estudio de la dinámica del blimp..................................................................................... 7 2.5 Simulación del modelo en MATLAB®............................................................................ 11
3 BACKSTEPPING.............................................................................................................. 13 3.1 ESTABILIDAD............................................................................................................. 13
3.1.1 Estabilidad de Lyapunov.................................................................................. 14 3.1.2 Funciones semidefinidas y definidas positivas................................................... 14 3.1.3 Teorema de estabilidad de Lyapunov para sistemas invariantes en el tiempo...... 15
3.2 FUNCIONES DE CONTROL DE LYAPUNOV............................................................... 15 3.3 INTEGRADOR BACKSTEPPING................................................................................. 17 3.4 DE BACKSTEPPING A CONTROL PID........................................................................ 21
4 LAZOS DE CONTROL, PERFIL DE PRUEBAS Y MODELOS REDUCIDOS........................ 22 4.1 LAZOS DE CONTROL................................................................................................. 22 4.2 PERFIL DE PRUEBAS................................................................................................ 23 4.3 MODELOS REDUCIDOS............................................................................................. 24
4.3.1 Modelo reducido de velocidad aerodinámica..................................................... 24 4.3.2 Modelo reducido de giros................................................................................. 26 4.3.3 Modelo reducido de altitud ............................................................................... 27
5 ESTRATEGIA DE CONTROL CLÁSICA............................................................................. 28 5.1 CONTROL DE VELOCIDAD AERODINÁMICA.............................................................. 28 5.2 CONTROL DE GIROS................................................................................................. 29 5.3 CONTROL DE ALTITUD.............................................................................................. 31
6 ESTRATEGIA DE CONTROL CON BACKSTEPPING......................................................... 34

IEM-II-10-04
ii
6.1 CONTROL DE VELOCIDAD AERODINÁMICA.............................................................. 34 6.2 CONTROL DE GIROS................................................................................................. 40 6.3 CONTROL DE ALTITUD.............................................................................................. 41
7 PRUEBAS DE ROBUSTEZ............................................................................................... 47 7.1 APLICACIÓN DE VIENTO........................................................................................... 47
7.1.1 Control clásico ................................................................................................ 47 7.1.2 Control backstepping....................................................................................... 48
7.2 APLICACIÓN DE VIENTO Y RUIDO ............................................................................ 49 7.2.1 Control clásico ................................................................................................ 49 7.2.2 Control backstepping....................................................................................... 50
7.3 VARIACIÓN DE LA MASA........................................................................................... 51 7.3.1 Control clásico ................................................................................................ 51 7.3.2 Control Backstepping....................................................................................... 52
7.4 CONCLUSIONES DE PRUEBAS DE ROBUSTEZ......................................................... 53 8 CONCLUSIONES............................................................................................................. 54 BIBLIOGRAFÍA ....................................................................................................................... 56

IEM-II-10-04
i ii
LISTA DE FIGURAS
Figura 1-1. Dirigible adquirido por la Universidad de Los Andes................................................... 2 Figura 2-1. Dirigible marca Minizepp.......................................................................................... 3 Figura 2-2. Sistemas coordenados del blimp .............................................................................. 4 Figura 2-3. Configuración de los alerones................................................................................ 10 Figura 2-4. Diagrama de bloques del modelo ........................................................................... 11 Figura 2-5. Implementación de las ecuaciones por medio de bloques........................................ 11 Figura 2-6. Gráficas de X , Y y Z para un torque TP = 10.76N ............................................... 12 Figura 2-7. Gráfica X vs. Y vs. Z.............................................................................................. 12 Figura 2-8. Gráficas de las velocidades lineales VX, VY y VZ...................................................... 12 Figura 4-1. Perfi l de pruebas................................................................................................... 23 Figura 4-2. Señales del perfi l de pruebas................................................................................. 24
Figura 4-3. Validación del modelo lineal reducido de velocidad aerodinámica aV ....................... 25
Figura 4-4. Validación del modelo lineal reducido de ángulo de yaw ψ ..................................... 26
Figura 4-5. Validación del modelo lineal reducido de altitud Z .................................................. 27 Figura 5-1. Respuesta del modelo reducido de velocidad aerodinámica con un control PI........... 28 Figura 5-2. Respuesta de la velocidad aerodinámica con un control PI y señal de control ........... 29 Figura 5-3. Respuesta del modelo reducido de giros con un control proporcional........................ 30 Figura 5-4. Respuesta del ángulo de giro ψ con un control proporcional y señal de control........ 30 Figura 5-5. Respuesta de la velocidad aerodinámica con un PI y giros con un P ........................ 31 Figura 5-6. Respuesta del modelo reducido de altura Z con un control PI................................... 32 Figura 5-7. Respuesta en altitud Z con un control PI y señal de control...................................... 32 Figura 5-8. Respuesta de los tres lazos de control: velocidad aerodinámica, giros y altitud ......... 33 Figura 5-9. Recorrido realizado por el blimp (sin viento y controles clásicos) .............................. 33 Figura 6-1. Respuesta de
aV con integrador backstepping (k1 = k2 = 5) y señal de control .......... 38
Figura 6-2. Respuesta de aV con integrador backstepping (k1=0.01,k2=2.01) y señal de control... 39
Figura 6-3. Respuesta del ángulo de giro con un backstepping y señal de control ...................... 40
Figura 6-4. Respuesta de aV con integrador backstepping y giros con backstepping.................. 41
Figura 6-5. Respuesta del sistema reducido de altitud con un control backstepping (m1=m2=10).. 42 Figura 6-6. Respuesta del sistema reducido de Z con control backstepping (m1=0.01,m2=2.01)... 42 Figura 6-7. Respuesta en Z con control backstepping (m1=0.01,m2=2.01) y señal de control ....... 43 Figura 6-8. Respuesta de los tres lazos de control implementados con técnica backstepping...... 43 Figura 6-9. Recorrido realizado sin viento y con controles mediante backstepping...................... 44

IEM-II-10-04
iv
Figura 6-10. Respuesta en altitud con backstepping (m1=0.01,m2=2.01) y señal de control.......... 44
Figura 6-11. Respuesta de los tres lazos de control: aV (PI), giros (P) y Z (Backstepping).......... 45
Figura 6-12. Recorrido realizado sin viento: aV (PI), giros (P), Z (backstepping)......................... 45
Figura 6-13. Respuesta de los tres lazos de control con backstepping y referencia fi ltrada.......... 46 Figura 6-14. Recorrido para controles backstepping y referencia fi ltrada .................................... 46 Figura 7-1. Respuesta de los tres lazos con viento (control clásico)........................................... 47 Figura 7-2. Recorrido con viento (control clásico)...................................................................... 47 Figura 7-3. Respuesta de los tres lazos con viento (control backstepping).................................. 48 Figura 7-4. Recorrido con viento (control backstepping)............................................................ 48 Figura 7-5. Respuesta de los tres lazos con viento y ruido (control clásico)................................ 49 Figura 7-6. Recorrido con viento y ruido (control clásico)............................................................ 49 Figura 7-7. Respuestas de los tres lazos con viento y ruido (control backstepping)..................... 50 Figura 7-8. Recorrido con viento y ruido (control backstepping)................................................. 50 Figura 7-9. Respuesta de los tres lazos con masa de 0.5kg, viento y ruido (control clásico)........ 51 Figura 7-10. Recorrido con masa 0.5kg, viento y ruido (control clásico)...................................... 51 Figura 7-11. Respuesta de los lazos con masa de 0.5kg, viento y ruido (control backstepping).... 52 Figura 7-12. Recorrido con masa 0.5kg, viento y ruido (control backstepping)............................ 52

IEM-II-10-04
v
AGRADECIMIENTOS
El autor quiere expresar sus agradecimientos al Ingeniero Alain Gauthier Sellier, Ph. D., profesor
titular del Departamento de Ingeniería Eléctrica y Electrónica de la Universidad de Los Andes y
asesor del trabajo que se presenta en este documento; y a Leonardo Solaque, M. Sc., estudiante
de doctorado de la Universidad de Los Andes quien es el coasesor de este trabajo.
Igualmente, agradecimientos especiales a los ingenieros Diego Alejandro Patiño y Luis Ignacio
Lopera; a los estudiantes Diego Mauricio Bello, Jose David Gómez, César Darío Cadena y todas
las personas que colaboraron con aportes a la realización de este trabajo. También se quiere dar
un agradecimiento a Francisco Javier García, Magdalena Pulido y Luz Marina Soriano por su
colaboración para hacer posible la documentación para Colciencias necesaria para compra de los
equipos.
Este trabajo está dedicado a mi familia por su apoyo permanente e incondicional.

IEM-II-10-04
1
1 INTRODUCCIÓN
Actualmente se están desarrollando varios proyectos relacionados con navegación aérea. En el
LAAS/CNRS (Toulouse, Francia), el grupo de robótica e inteligencia artificial (RIA) l leva 25 años
haciendo investigación en robots móviles autónomos iniciando así un proyecto relacionado con el
control autónomo de un dirigible. El objetivo principal del proyecto es lograr la operación
coordinada autónoma de los conjuntos aire/tierra/robot desde el planeamiento de la misión hasta el
control del blimp [2][3][4][5]. En la Universidad de Campinas (Brasil) el proyecto AURORA busca
estrategias para control autónomo [14]. En la universidad del Virginia (Estados Unidos) y en la
Universidad de Stuttgart (Alemania), los proyectos AZTEC [13] y LOTTE respectivamente,
adelantan trabajos en dirigibles autónomos solares.
En el caso de la Universidad de los Andes, el proyecto está en su fase inicial, es decir que se ha
investigado y se ha hecho una recolección bibliográfica importante sobre el tema de dirigibles
autónomos y de técnicas de control de dichos sistemas. Ya se hicieron las gestiones para la
adquisición de un dirigible que se describe más adelante. Sin embargo existen trabajos que son de
importancia para el desarrollo del proyecto como la tesis de maestría del Ingeniero Luis Alonso
Rivera quien hizo el diseño y la construcción de un dirigible radio controlado. También está el
trabajo de grado del Ingeniero Mauricio Arévalo[1], que consiste en el modelaje, la identificación y
la simulación del control de vuelo de un dirigible. Actualmente varios trabajos de investigación
relacionados con el tema. El objetivo general del proyecto de la Universidad es realizar control de
vuelo, exploración autónoma y seguimiento de trayectorias.
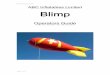
El dirigible adquirido por la Universidad es fabricado por Minizepp, una empresa suiza que tiene su
sede en Lausanne. El globo tiene las siguientes características:
- Carga paga de 10kg al nivel del mar
- Dimensiones 10 metros de longitud y 2 metros de diámetro
- Material nylon
- Góndola equipada con dos motores de propulsión alimentados con gasolina: dos litros de
gasolina se tiene una hora de autonomía de vuelo
- Cuatro alerones traseros que pueden moverse.
- Control remoto con dos receptores y 10 canales.
- Sistema de seguridad: válvula y sistema de caída automático

IEM-II-10-04
2
A continuación se muestra una foto del dirigible.
Figura 1-1. Dirigible adquirido por la Universidad de Los Andes
El presente informe presenta el trabajo realizado en la tesis de Maestría en Ingeniería Electrónica
titulada “Diseño de un Sistema de Control de Vuelo de un Blimp”. Esta tesis se sitúa entonces
dentro del marco de investigación en técnicas de control no lineal de la facultad de ingeniería de la
Universidad de los Andes, específicamente como un apoyo en el proyecto que busca lograr la
operación semi-autónoma de un dirigible sin tripulación de tal forma que pueda ser úti l en
aplicaciones de exploración, cartografía, meteorología, entre otros (Tesis doctoral titulada
“Integración en la Percepción del Entorno y Comando de un Globo”).
El objetivo general de este trabajo es el diseño de estrategias de control para el vuelo autónomo de
un blimp. Estas estrategias se validan mediante la evaluación de los resultados obtenidos en
simulación. El objetivo planteado se cumple gracias al trabajo hecho en el modelaje del blimp en
donde se tratan las relaciones físicas con la teoría mecánica y aerodinámica clásica. Se analizan
también las condiciones de vuelo que permiten asumir desacoples en el sistema y así obtener
modelos reducidos del mismo. Se diseñaron entonces estrategias de control a partir de técnicas
clásicas y de backstepping.
El informe se encuentra dividido de la siguiente manera:
• En el capítulo 2 se presenta el modelo analizado del dirigible
• En el capítulo 3 se presenta la técnica de backstepping estudiada
• En el capítulo 4 se presenta los lazos de control escogidos, el perfi l de pruebas y los modelos
reducidos obtenidos
• En el capítulo 5 se presenta la estrategia de control clásica
• En el capítulo 6 se presenta la estrategia de control con backstepping
• En el capítulo 7 se presentan pruebas de robustez realizadas sobre los controles diseñados
• En el capítulo 8 se presentan las conclusiones del trabajo realizado

IEM-II-10-04
3
2 MODELO MATEMÁTICO DEL BLIMP
Un dirigible hace parte de la familia de los aeróstatos que son dispositivos que vuelan y son más
ligeros que el aire. En este caso en particular, para lograr la flotación se util iza helio. La aeronave
está compuesta de las siguientes partes:
• Envoltura (carena): puede ser rígida, flexible o semi-rígida
• Alerones: son los que proporcionan una estabil idad aerostática y aerodinámica
• Góndola: donde se ubican los motores necesarios para la propulsión
En la Figura 2-1 se pueden identificar las partes nombradas anteriormente.
Figura 2-1. Dirigible marca Minizepp
Para realizar el control de un dispositivo como el que se describió, es necesario establecer un
modelo matemático del mismo. El modelo que se util izará es tomado del trabajo realizado con el
dirigible AS-500 del laboratorio LAAS – CNRS de Toulouse, Francia [2][3][4]. En este caso este
modelo consta de dos partes:
• Estudio cinemático: tiene que ver con la descripción del movimiento a partir de rotaciones y
traslaciones del dispositivo.
• Estudio dinámico: es la síntesis de todas las fuerzas que actúan sobre el cuerpo y que
provocan su movimiento.
Para describir de manera adecuada el modelo, en primer lugar se enuncian los sistemas de
referencia uti l izados, luego se hará el estudio cinemático seguido del estudio dinámico del dirigible.

IEM-II-10-04
4
2.1 SISTEMAS DE REFERENCIA
Para poder realizar el estudio cinemático, se hace necesaria la definición de los sistemas de
referencia en espacios que están relacionados con el movimiento del dispositivo. En este caso se
escogen dos espacios: el espacio terrestre y el espacio del dirigible.
En el espacio terrestre se escoge una base global 0B (Norte, Este, Abajo) y se considera que este
sistema es gali leano y su origen es la posición inicial del dirigible. El sistema de referencia se
denomina 0R .
En el espacio del dirigible se definen dos sistemas de referencia locales, según se ilustra en la
Figura 2-2. El primer sistema está ligado a la geometría del cuerpo y tiene una base ( )ZYXB ,, y
se denomina dR . El eje X está orientado a lo largo del eje de revolución de la carena. El origen
de este sistema es la nariz del dirigible. El segundo sistema de referencia tiene una base
( )aaaa ZYXB ,, , es el sistema aeronáutico y se denomina aR . El eje aX está orientado siguiendo
la velocidad aeronáutica aV que es la velocidad del dirigible con respecto al viento. El origen es
también la nariz del dirigible.
La nariz es un punto conocido para los sistemas locales y además se sitúa sobre el eje de
revolución de la carena. El centro de gravedad de la aeronave no se escogió como origen ya que
de ser así, en las ecuaciones aparecerían las rotaciones de la envoltura.
Figura 2-2. Sistemas coordenados del blimp

IEM-II-10-04
5
2.2 CARENA Y MODOS DE VUELO DEL DIRIGIBLE
La carena del dirigible va a ser considerada como un elipsoide, de tal forma que el cálculo de la
matriz de inercias se simplifique al asumir que el volumen de la envoltura sea equivalente al
volumen de un elipsoide. Las carenas de los dirigibles clásicos se descomponen en tres partes:
una parte delantera que penetra en el aire y está constituida de una porción de elipsoide, una parte
central que es cilíndrica y una parte trasera más alargada que no es un elipsoide. El volumen de la
carena se puede aproximar al volumen de un elipsoide asumiendo que el volumen de la parte
central compensa la pérdida de volumen debida a la forma alargada de la parte trasera. De esta
manera, la carena se puede caracterizar con dos parámetros: el volumen y la relación entre el
mayor y el menor radio del elipsoide. Si dos carenas tienen el mismo volumen, las fuerzas de
empuje serán iguales. La aerodinámica de la carena está determinada por la relación de radios.
Se pueden distinguir dos modos de vuelo: vuelo aerostático y vuelo aerodinámico. Estos modos se
explicarán a continuación.
2.2.1 Vuelo aerostático
El vuelo aerostático es un vuelo lento que es relativamente sensible a las perturbaciones exteriores
como el viento. Es necesario que se presente un casi equilibrio entre el peso y la fuerza de empuje
de Arquímedes. Por estas razones, este tipo de vuelo se realiza en interiores o en exteriores en
condiciones ideales, es decir sin viento. Si el dispositivo dispone de motores apropiados, se
pueden hacer rotaciones en zigzag sobre su propio eje.
En este tipo de vuelo, la relación de aspecto (relación entre radios) no tiene importancia.
Igualmente, la superficie de los alerones sólo se tiene en cuenta para estabil idad aerostática. El
equilibrio aerostático se logra con un volumen apropiado.
2.2.2 Vuelo aerodinámico
En este tipo de vuelo se tienen en cuenta los frotamientos viscosos. Es un vuelo más rápido y por
este motivo es menos sensible a las perturbaciones que el vuelo aerostático. Se pueden realizar
vuelos en exteriores y es necesario que la relación de aspecto sea superior a cuatro. La superficie
y la posición de los alerones son importantes para el equilibrio aerostático y aerodinámico. Gracias

IEM-II-10-04
6
al empuje aerodinámico, el dirigible puede ser más pesado que el aire. Si le envoltura es flexible
hay limitaciones de velocidad para así evitar deformaciones de la misma.
2.2.3 Vuelo de crucero
En este tipo de vuelo, se considera que los sistemas de referencia locales coinciden y que los
ángulos de incidencia y derrapaje ( 0α = , 0β = ) son iguales a cero. Con estas hipótesis, el
modelo teórico puede ser reducido ya que los efectos aerodinámicos se pueden despreciar y así se
pueden obtener los modelos reducidos que se presentarán en el capítulo 4.
2.3 ESTUDIO DE LA CINEMÁTICA DEL BLIMP
Tres puntos se deben considerar para el modelaje: el centro volumétrico (C ) que normalmente es
el punto donde se ubica la fuerza de empuje de Arquímedes; el centro de gravedad del dirigible
(G ), el cual puede ser desplazado por cambios de geometría de la carena, en las bayonetas o por
cambios de peso en el dirigible (estos cambios puede deberse al consumo de combustible); el
punto donde se hayan fi jado los sistemas dR y aR que en este caso es la nariz ( N ) y que está
ubicado sobre el eje de revolución de la carena. Cabe anotar que estos puntos se asumen fijos.
Una vez definidos los sistemas de referencia, se deben encontrar las matrices de rotación
necesarias para poder las posiciones de un sistema a otro. Se tienen dos matrices: la matriz de
rotación 1J que relaciona los sistemas 0R con dR y la matriz de rotación 2J que relaciona los
sistemas dR y aR . Estas matrices están en función de los ángulos de roll (φ ), pitch (θ ) y yaw
(ψ ) medidos en el sistema dR .
En las ecuaciones (2-1) y (2-2) se muestran las matrices de transformación. Los vectores de
velocidades lineales y rotacionales en los sistemas de referencia locales son 1v y 2v
respectivamente. Estas señales serán entregadas por el GPS y el compás magnético.
( )1 2
cos cos sin cos sin cos sin sin sin sin cos coscos sin cos cos sin sin sin cos sin cos sin sin
sin cos sin cos cosJ
ψ θ ψ φ φ ψ θ φ ψ θ ψ φη θ ψ ψ φ θ ψ φ ψ φ φ ψ θ
θ θ φ θ φ
− + +⎡ ⎤⎢ ⎥= + − +⎢ ⎥⎢ ⎥−⎣ ⎦
(2-1)

IEM-II-10-04
7
( )⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−=
θφ
θφ
φφθφθφ
η
coscos
cossin0
sincos0tancostansin1
22J
(2-2)
Este modelo se puede llevar a un estructura paramétrica como se muestra en la ecuación (2-3).
( )( ) ⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
×
×
2
1
2233
3321
2
1
00
vv
JJ
ηη
ηη&
&
(2-3)
Esta relación tiene una singularidad en 2πθ = , pero para un dirigible que tiene una buena
estabil idad aerodinámica es difícil que esta situación se presente.
2.4 ESTUDIO DE LA DINÁMICA DEL BLIMP
Las ecuaciones relacionadas con la dinámica del dirigible se determinan para el punto
correspondiente a la nariz N del dispositivo. Se parte de la primera ley de Newton con las
siguientes consideraciones:
• El dirigible se considera como un sólido
• Sólo se considera la carena (elipsoide)
• La inercia de la góndola se desprecia
• La inercia de los alerones se considera como nula
El modelo dinámico del dirigible está dado por la ecuación (2-4).
( ) ( ) ( )Aadpd vTvTgTvM +−−= η&
(2-4)
Donde:
• [ ]T21 ηηη = es el vector de posiciones
• [ ]Tvvv 21= es el vector de velocidades • dM es la matriz de masas del dirigible

IEM-II-10-04
8
• pT es el torque de propulsión vectorizada
• ( )ηg es el torque aerostático
• ( )vTd es el torque centrífugo y de coriolis
• ( )Aa vT es el torque aerodinámico
La matriz de masa e inercias en la nariz del dirigible es dM y está dada por:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−−
−
=
zxzg
ygg
xzxg
g
gg
g
d
IImxImxmz
IImzmxm
mxmzmmzm
M
000000
0000000
0000000
(2-5)
Donde gx y gz dan la posición del centro de gravedad con respecto a la nariz, m es la masa total
del dirigible e I son los momentos de inercia.
El torque de propulsión vectorizada agrupa los efectos debido a los actuadotes que son los
elementos que modifican activamente la dinámica y la cinemática del dirigible. Estos actuadotes
son los motores de propulsión y las superficies móviles ubicadas en el empenaje de la nave. El
torque está dado por la ecuación
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
−=
0sincos
0sin
0cos
µµ
µ
µ
xMzM
M
M
p
OFOF
F
F
T
(2-6)
Donde MF es la fuerza motriz generada por los motores y µ es el ángulo de vectorización de los
motores. Las coordenadas de los motores respecto al centro de gravedad son xO y zO .
El torque aerostático agrupa las fuerzas y los momentos inducidos debido al fenómeno de flotación
y está dado por la ecuación (2-7).

IEM-II-10-04
9
( )
( )( )( )
( )( ) ⎥
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−+
−−−−
−
=
φθφθθ
φφθφθ
θ
η
sincoscoscossin
sincoscossincos
sin
BcGg
BcGgGg
Gg
BG
BG
BG
FxFxFxFxFz
FzFFFF
FF
g
(2-7)
Donde GF es la fuerza de la gravedad, BF es la fuerza de empuje, gx y gz dan la posición del
centro de gravedad con respecto a la nariz, cx es la posición del centro de volumen respecto a la
nariz.
El torque centrífugo y de coriolis representa los efectos dinámicos que son consecuencia de la
velocidad lineal y angular que experimenta el blimp. Su expresión está dada por la ecuación (2-8).
( ) ( )( ) ( )
( ) ⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+−−−−−
−−−−+−
+−+−
+
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+−++−−
+−−−−
=
qrIprIIprIIrpI
qrIIpqIqmzprmxpmz
pqmxqrmzrmxprmzqmx
urmxwpmxuqmxwqmzvpmxvrmz
wpmzurmzmuqmwpmwpmurmvrmwq
vT
xzyx
xzxz
zyxz
ggg
gg
ggg
gg
gggg
ggd
22
22
22
(2-8)
El torque aerodinámico se obtiene con el planteamiento de la hipótesis de que un cuerpo
cualquiera que está en movimiento dentro de un fluido posee las siguientes condiciones:
• Velocidad aerodinámica pequeña, número de Mach muy confiable, densidad y viscosidad del
fluido constantes
• En el interior de la carena los movimientos de helio que se inducen debido a las aceleraciones
del dirigible son despreciables por el tamaño
El torque está dado por la ecuación (2-9) que se muestra a continuación.
( ) ( ) ( )221 AstaAAAa vTvvDvAvT +−= &
(2-9)

IEM-II-10-04
10
Donde AvA & representa los fenómenos que dependen de las aceleraciones, ( ) AvvD 21 representa
los fenómenos que traducen las composiciones “traslación – rotación” y “rotación – rotación” y por
último ( )2Asta vT representa los esfuerzos y los momentos estacionarios en la nariz del dirigible. La
expresión de cada uno de estos componentes se da en las ecuaciones (2-10), (2-11) y (2-12).
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
ψθφ
&&
&&
&&&
&
&
&
&
&
&
&
&
& A
A
A
A
A
A
A
wvu
aaaaaa
aaaaa
aaaaa
rqp
wvu
aaaaaa
aaaaa
aaaaa
vA
666462
555351
464442
3533
262422
1511
666462
555351
464442
3533
262422
1511
000000
0000000
0000000
000000
0000000
0000000
(2-10)
( )
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−
−
−
=
nnrefrefA
mnrefrefA
refrefA
NrefA
LrefA
TrefA
Asta
CLSV
CLSV
CLSV
CSV
CSV
CSV
vT
2
2
ln2
2
2
2
2
212121
212121
ρ
ρ
ρ
ρ
ρ
ρ
(2-11)
( )
( )( )
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( ) ⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−+−−−+−
−−+−+−+
−−++−−++−−−−
−−+
−−
=
rqp
wvu
raqaapaqaarmxapmxaararaapapaparaqmxa
raaqaparaaqaamxarmpqarapapaqmxaqaqapaamxrmp
raqaraqara
vvD A
A
A
A
00
00000
0
463544534215112
26132451
64446664156242222
35
6655642435623562131533
152624221211
153533111113
2635243322
21
rr
r
rr
r
rr
(2-12)
El dirigible consta de cuatro alerones que forman un ala tipo delta. La influencia de éstos consiste
en modificar los esfuerzos de roll, pitch y yaw. Se tienen dos configuraciones posibles que se
presentan en la Figura 2-3.
Figura 2-3. Configuración de los alerones

IEM-II-10-04
11
2.5 SIMULACIÓN DEL MODELO EN MATLAB®
La simulación en MATLAB se hizo util izando SIMULINK para implementar las ecuaciones descritas
en las secciones anteriores. En la Figura 2-4 se presenta el diagrama de bloques general del
modelo.
Figura 2-4. Diagrama de bloques del modelo
Al interior del bloque llamado Dinámica Dirigible se encuentran diferentes bloques que contienen
las S-function necesarias para implementar las ecuaciones descritas anteriormente. Estos bloques
se muestran en la siguiente figura.
Figura 2-5. Implementación de las ecuaciones por medio de bloques

IEM-II-10-04
12
Las simulaciones realizadas arrojaron los siguientes resultados.
X Y Z
Figura 2-6. Gráficas de X , Y y Z para un torque TP = 10.76N
Figura 2-7. Gráfica X vs. Y vs. Z
Figura 2-8. Gráficas de las velocidades lineales VX, VY y VZ

IEM-II-10-04
13
3 BACKSTEPPING
A diferencia de otros esquemas de control no lineal, backstepping es una metodología de diseño
recursiva. Estos diseños recursivos se constituyen de un número finito de pasos simples. Son
llamados backstepping porque van desde la ecuación escalar hasta la entrada de control (hacia
atrás) las cuales están separadas por un número de integraciones [7].
Cuando no hay incertidumbres la técnica de backstepping puede ser uti l izada para que un sistema
no lineal se comporte como uno lineal en un nuevo conjunto de coordenadas. En este y otros
métodos, algunas no linealidades que pueden ser de util idad para la estabilización y el seguimiento
pueden ser canceladas. Sin embargo una de las ventajas del método de backstepping es su
flexibil idad que le permite evitar ciertas cancelaciones útiles siguiendo los objetivos de estabilidad y
seguimiento. Con la metodología de backstepping, la construcción de las leyes de control
realimentado y de las funciones de Lyapunov asociadas es sistemática. Propiedades fuertes de
estabil idad global y local y de seguimiento se generan en el sistema no lineal en un número de
pasos que no es mayor al orden del sistema. Existe también una forma de backstepping cuando la
incertidumbre es constante pero de parámetros desconocidos.
Backstepping es entonces una herramienta de diseño para sistemas lineales y no lineales que
puedan ser representados en su forma puramente realimentada (pure feedback form) o en su
forma estrictamente realimentada (strict feedback form) [6][7][8]. El algoritmo que se va a presentar
en este artículo corresponde al integrador backstepping [7][9].
3.1 ESTABILIDAD
En los sistemas de control, la estabil idad es un requisito primordial. Uno de los conceptos más
util izados es el de la estabil idad según Lyapunov [10].
A finales del siglo XIX, el matemático ruso Lyapunov hizo contribuciones fundamentales a la teoría
de estabil idad de sistemas no lineales investigando la siguiente ecuación diferencial:
( ) ( )0 0dx
f x fdt
= =
(3-1)

IEM-II-10-04
14
Como ( )0 0f = entonces ( ) 0x t = es una solución de la ecuación anterior. Para garantizar que
la solución existe y es única se deben plantear supuestos sobre ( )f x . Un supuesto suficiente es
que ( )f x sea localmente Lipschitz, esto es
( ) ( ) 0f x f y L x y L− ≤ − >
(3-2)
alrededor del origen. La investigación de Lyapunov consistió en investigar si la solución de la
ecuación (3-1) es estable con respecto a las perturbaciones. Para eso se introducen las siguientes
definiciones y teoremas.
3.1.1 Estabilidad de Lyapunov
La solución ( ) 0x t = es estable si para 0ε > dado que existe un número ( ) 0δ ε > tal que todas
las soluciones con condiciones iniciales ( )0x δ< tengan la propiedad ( )0x ε< para
0 t≤ ≤ ∞ . La solución es inestable si no es estable. La solución es asintóticamente estable si es
estable y si δ es tal que todas las soluciones cumplan que ( ) 0x t → a medida que t → ∞ . Si
la solución es asintóticamente estable para cualquier valor inicial entonces se dice que es
globalmente estable.
Cabe anotar que la teoría de estabil idad de Lyapunov se refiere a la estabil idad de una solución
particular y no a la estabil idad de la ecuación diferencial.
3.1.2 Funciones semidefinidas y definidas positiv as
Sea una función continuamente diferenciable : nV →R R . Se dice que esta función es positiva
definida en una región nU ⊂ R que contiene el origen si:
• ( )0 0V =
• ( ) 0, 0V x x U y x> ∈ ≠

IEM-II-10-04
15
Si se cumple ( ) 0, 0V x x U y x≥ ∈ ≠ entonces la función es semidefinida positiva.
Para una función positiva definida las curvas de nivel alrededor del origen y las curvas de valores
mayores encierran las curvas de valores menores. Si se puede encontrar una función de tal forma
que el vector de velocidad ( )dx dt f x= siempre apunte hacia el interior de las curvas de nivel,
entonces la solución que empieza dentro de una curva de nivel dada no puede pasar nunca al
exterior de dicha curva.
3.1.3 Teorema de estabilidad de Lyapunov para sistemas inv ariantes en el tiempo
Si existe una función : nV →R R positiva definida tal que su derivada a lo largo de la solución de
la ecuación (3-1),
( ) ( )T TdV V dx V
f x W xdt x dt x
∂ ∂= = = −
∂ ∂
(3-3)
sea semidefinida negativa, entonces la solución ( ) 0x t = es estable.
Si dV dt es definida negativa, entonces la solución es asintóticamente estable. La función V se
denomina función de Lyapunov para el sistema de la ecuación (3-1). Además si 0dV dt < y
( )V x → ∞ cuando x → ∞ entonces la solución es globalmente estable.
Las funciones de Lyapunov, considerando el teorema anterior, son bastante útiles y utilizadas en el
diseño de sistemas de control adaptativos. Por esta razón es importante tener un método para
encontrar dichas funciones. El problema es que no existe un método universal para encontrar las
funciones por lo que se tiene que recurrir a la prueba y el error.
3.2 FUNCIONES DE CONTROL DE LYAPUNOV
Para el diseño mediante el método de backstepping, es necesario conocer el concepto de función
de control de Lyapunov [7].

IEM-II-10-04
16
Se supone el siguiente sistema invariante en el tiempo:
( ) ( ), , , , 0,0 0nx f x u x u f= ∈ ∈ =&
(3-4)
El problema consiste en diseñar una ley de control realimentado para la variable u tal que el
equilibrio 0x = del sistema de lazo cerrado dado por:
( )( ),x f x xα=&
(3-5)
sea global y asintóticamente estable. Se puede escoger una función ( )V x como candidata tal que
su derivada a lo largo de las soluciones de (3-5) satisfagan ( ) ( )V x W x≤ −& , donde ( )W x es una
función positiva definida. Se debe encontrar entonces ( )xα para garantizar que para todo nx ∈
( ) ( )( ) ( ),V
x f x x W xx
α∂
≤ −∂
(3-6)
Una función : nV →R R es una función de control de Lyapunov para (3-4) si
( ) ( ), 0, 0infu
Vx f x u x
x∈
∂⎧ ⎫ < ∀ ≠⎨ ⎬∂⎩ ⎭R
(3-7)
El concepto de función de control de Lyapunov es una generalización del diseño por Lyapunov. Es
además una condición necesaria y suficiente para la existencia de una ley de control que satisface
(3-6), es decir que la existencia de una función de control de Lyapunov es equivalente a tener una
estabil idad global asintótica. Sin embargo la principal desventaja del concepto de las funciones de
Lyapunov (clf) es que para la mayoría de sistemas no lineales no se conoce una clf. La tarea de
encontrar una clf puede llegar a ser bastante difícil, afortunadamente para sistemas escalares, la
función ( ) 21 2V x x= es siempre una opción razonable para una clf [7].

IEM-II-10-04
17
3.3 INTEGRADOR BACKSTEPPING
Habiendo hecho una introducción de los puntos anteriores, se puede explicar el algoritmo que se
va a util izar y que es presentado en [9].
El método es llamado integrador backstepping ya que se adiciona una acción integral al algoritmo
sencil lo. Sea refy la señal de referencia, u la señal de control y y la salida del sistema.
Considérese el sistema
( ) ( )( )
( )( )
11 0
11 0
m mm
n nn
Y s B s s b s bG s
U s A s s a s a
−−
−−
+ + += = =
+ + +L
L
(3-8)
Ahora se aumenta la planta incluyendo una acción integradora
( ) ( )( )
1* 1 0
* 11 0
m mm
n nn
B s s b s bG s
A s s a s a s
−−
+−
+ + += =
+ + +L
L
(3-9)
La representación en variables de estado del sistema aumentado (3-9) es:
1 2
2 3
1
1 0 2 1 3 1 1
1
n n
n n n
x xx x
x xx a x a x a x w
y x
+
+ − +
==
== − − − − +
=
&
&
M
&
& L
(3-10)
Donde
( ) ( ) ( )W s sB s U s=
(3-11)
Ahora se aplica el procedimiento de backstepping para calcular la ley de control w . Al final, se
encuentra el control real u uti l izando la ecuación (3-11).

IEM-II-10-04
18
Esta ecuación también se puede expresar de la forma:
( ) ( )( )
W sU s
sB s=
(3-12)
Paso 1: Se define la primera variable de error
1 1ref refe y y x y= − = −
(3-13)
Ahora se debe escoger la primera función de control de Lyapunov:
21 1
12
V e=
(3-14)
La derivada de esta función de control de Lyapunov está dada por:
( ) ( )1 1 1 1 1 1 2ref refV e e e x y e x y= = − = −& & & & &
(3-15)
Esta derivada debe ser negativa, por lo que se escoge 2x como el primer control virtual. El valor
deseado de este control es:
( )1 2 1 1 1 0refdx y k e kα = = − >&
(3-16)
Así, la ecuación (3-15) es definida negativa.
Paso 2: Se define una nueva variable de error
2 2 1 2 1 1 refe x x k e yα= − = + − &
(3-17)
Se introduce una función de control de Lyapunov aumentada:
2 22 1 2
1 12 2
V e e= +
(3-18)
Y como
1 2 2 1 1refe x y e k e= − = −& &
(3-19)
La derivada de (3-18) está dada por:
( ) ( )( )
2 1 1 2 2 1 2 1 1 2 2 1
2 22 1 1 2 1 1 1 2 31 ref
V e e e e e e k e e x
V k e e k e k e x y
α= + = − + −
⎡ ⎤= − + − + + −⎣ ⎦
& && & &
& &&
(3-20)

IEM-II-10-04
19
Escogiendo 3x como el segundo control virtual, y seleccionando su valor para hacer que la
derivada dada por (3-20) sea definida negativa, se tiene
( )( ) ( )
2 3
21 1 1 2 2 21 , 0
d
ref
x
k e k k e y k
α =
= − − + + >&&
(3-21)
Paso i: Se toma
1i i ie x α −= −
(3-22)
2
1
12
i
i jj
V e=
= ∑
(3-23)
Que resulta en:
1 1 1 2i i i i ie e k e e− − − −= − −&
(3-24)
[ ]1
21 1
1
i
i j j i i i ij
V k e e e x α−
− −=
= − + + −∑& &&
(3-25)
El control virtual es entonces:
( )1 1, 0
i i d
i i i i i
x
k e e k
α
α− −
=
= − − + >
&
&
(3-26)
Si lo anterior se reescribe en el plano S, se obtiene:
( ) ( ) ( ) ( )1i
i i i ref i iA s s Y s s s X s= − − − −I K I K
(3-27)
Donde ( )iA s , ( )refY s y ( )1X s son las transformadas de Laplace de iα , refy y 1x y donde iI
es la matriz identidad y
1
2
1
1 0 01 1 00 0
1 10 0 0 1
i
i
i
kk
kk
−
−⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥=⎢ ⎥− −⎢ ⎥⎢ ⎥− −⎣ ⎦
K
L
M
O O O
M
(3-28)

IEM-II-10-04
20
Paso n+1: Se toma
1 1n n ne x α+ += −
(3-29)
12
11
12
n
n jj
V e+
+=
= ∑
(3-30)
Que resulta en
1 1n n n n ne e k e e+ −= − −&
(3-31)
[ ]21 1 1
1
n
n j j n n n nj
V k e e e x α+ + +=
= − + + −∑& &&
(3-32)
Que lleva a
1 1 1n n n ne k e e+ + += − −&
(3-33)
El control virtual es:
( )1 1
1 1 1, 0n n d
n n n n n
x
k e e k
α
α+ +
+ + +
=
= − − + >
&
&
(3-34)
O en el plano S:
( ) ( ) ( ) ( )11 1 1 1 1 1
nn n n ref n nA s s Y s s s X s+
+ + + + += − − − −I K I K
(3-35)
Entonces de (3-10)
( ) ( ) ( )1
11 1
0
nj
n jj
sX s a s X s W s−
++
=
= − +∑
(3-36)
De (3-36) se despeja el control ( )W s .
( ) ( ) ( ) ( )( )1 1
1 1 1 11 1 1
0 0
n nj n j n
j ref j n n refj j
W s a s s Y s a s s s Y s X s− −
+ + + ++ +
= =
⎛ ⎞ ⎛ ⎞= + + − + − − −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∑ ∑ I K
(3-37)
El sistema de error está dado por:
1ne e+= K&
(3-38)
Con [ ]1 2 1T
ne e e e += L .

IEM-II-10-04
21
3.4 DE BACKSTEPPING A CONTROL PID
Se define el polinomio
( ) 1 1n nF s s + += −I K
(3-39)
La dinámica del sistema de error de lazo cerrado corresponde al polinomio (3-39). El control ( )W s
se puede expresar en términos del polinomio ( )F s quedando las constantes ik como los
parámetros a encontrar.
Si se define la transformada de Laplace del error de seguimiento como
( ) ( ) ( )refE s Y s Y s= −
(3-40)
Al despejar el control real u se puede encontrar una expresión de la forma
( ) ( ) ( ) ( )( ) ( )
id c
ref
TT s K A ssU s E s Y sB s B s
+ += +
(3-41)
Donde las constantes dT , iT y cK están expresadas en términos de las constantes ik .

IEM-II-10-04
22
4 LAZOS DE CONTROL, PERFIL DE PRUEBAS Y MODELOS REDUCIDOS
En esta fase del proyecto se pretende hacer el diseño de un sistema de control para el vuelo de
crucero del dirigible. En esta modalidad de vuelo, el dirigible se encuentra a una altura constante y
con una velocidad constante no nula. Esta velocidad corresponde a la velocidad aerodinámica
necesaria para que el dirigible alcance y mantenga una altura constante. Cuando se está
realizando un vuelo de crucero, el ángulo de incidencia es igual al ángulo de pitch.
En el vuelo de crucero, el dirigible siempre tiene entonces una velocidad no nula que será
controlada por la propulsión de los motores únicamente. Los cambios de orientación y de altura
serán realizados gracias a las superficies móviles del dirigible o alerones.
4.1 LAZOS DE CONTROL
A continuación se enuncian las variables controladas y manipuladas escogidas para realizar el
control para el vuelo de crucero del dirigible.
• Control de velocidad aerodinámica: Lo que se quiere controlar es la velocidad aerodinámica ya
que si α y β son pequeños (por las condiciones de vuelo de crucero) entonces la velocidad
en el eje x del sistema de referencia dR es igual a la velocidad aerodinámica.
- Variable controlada: velocidad aerodinámica aV
- Variable manipulada: fuerza motriz proporcionada por los propulsores. Se supone que el
ángulo de vectorización es igual a cero.
• Control de giros
- Variable controlada: ángulo de orientación ψ
- Variable manipulada: ángulo gδ que está relacionado con el ángulo de deflexión de los
alerones.
• Control de altitud
- Variable controlada: altura Z
- Variable manipulada: ángulo eδ que está relacionado con el ángulo de deflexión de los
alerones.

IEM-II-10-04
23
La altura no se controlará con la vectorización de los motores puesto que de esta manera quedaría
evidentemente acoplada a la velocidad. Esta característica se util izará para las fases de despegue
y aterrizaje del blimp. En esta fase del proyecto no se va a realizar el diseño ni la implementación
de controles que permitan la realización de éstas etapas.
4.2 PERFIL DE PRUEBAS
Las estrategias de control implementadas deben ser evaluadas en cuanto a su desempeño. Para
tal efecto se util iza un perfi l de pruebas que proporciona las referencias necesarias para que el
blimp realice un vuelo determinado. Según lo descrito en la sección anterior, el perfil debe tener
entonces tres señales de referencia que corresponden a los valores deseados de: velocidad
aerodinámica aV , valor del ángulo de yaw ψ y altura Z . Las referencias se escogieron de tal
manera que, una vez que el blimp se encuentra en una altura inicial deseada, se recorra un
cuadrado. Además, también se incluyen los valores relacionados con el viento: velocidad y
ángulos. Las señales de referencia serán entregadas por el planificador de trayectorias cuando ya
se haya alcanzado una fase más avanzada en el proyecto de tal manera que el blimp siga una ruta
deseada.
Los reguladores diseñados controlan entonces la velocidad aerodinámica, la altura y los giros. En
el caso en el que no exista viento, no habrá desvíos de la ruta. Si existen desvíos, el planificador
los debe detectar y debe hacer un ajuste en las referencias para que el dirigible vuelva a la ruta
deseada. Por lo tanto la ejecución de la trayectoria es vigilada por el planificador quien sabe si el
dispositivo se dirige o no a su objetivo. El recorrido deseado como perfi l de pruebas se muestra en
la Figura 4-1 y en la Figura 4-2 se muestran las señales de referencia individuales al igual que las
señales relacionadas con el viento.
Figura 4-1. Perfil de pruebas

IEM-II-10-04
24
Figura 4-2. Señales del perfil de pruebas
4.3 MODELOS REDUCIDOS
En esta sección se presentan los modelos reducidos para cada uno de los casos mencionados
anteriormente. También se presenta la validación de cada uno de los modelos encontrados con las
respuestas del sistema completo.
4.3.1 Modelo reducido de v elocidad aerodinámica
Una de las variables a controlar para el vuelo de crucero es la velocidad aerodinámica. La
referencia de este lazo estará dada por el planificador de trayectorias, de tal manera que
manteniendo una velocidad aerodinámica constante, el dirigible se desplace para alcanzar una
posición final previamente definida. Para esta variable se obtiene un modelo reducido lineal.
El modelo reducido de velocidad se obtuvo al poner un valor de fuerza motriz de tal manera que se
obtuvieran las condiciones de vuelo de crucero. En este caso, se debe alcanzar una altura
constante y los ángulos de incidencia y derrapaje deben ser iguales a cero. Los ángulos de los

IEM-II-10-04
25
alerones y el de vectorización son también iguales a cero. Esto se hace con el fin de desacoplar el
modelo y sólo considerar la velocidad aerodinámica. Para obtener dichas condiciones, la fuerza
motriz que se debe aplicar es 7.0353mF N= . Las posiciones y orientaciones iniciales están dadas
por el vector [ ]0 0 2 0 0 0− .
La respuesta de la velocidad aerodinámica se puede comparar con la respuesta de un sistema de
primer orden. Haciendo la identificación de los parámetros de un sistema de primer orden ( ),K τ a
partir de la respuesta obtenida, se obtiene la función de transferencia de primer que se muestra en
la ecuación (4-1).
( )( )
0.875713.6 1
a
m
V sF s s
=+
(4-1)
En la siguiente figura se muestra la validación del modelo reducido obtenido. En azul se muestra la
respuesta del modelo completo y en verde la repuesta del modelo reducido para el valor de la
entrada mF aplicada.
Figura 4-3. Validación del modelo lineal reducido de velocidad aerodinámica aV

IEM-II-10-04
26
4.3.2 Modelo reducido de giros
El control de giros permitirá que el blimp se desplace en su plano lateral de la manera deseada.
Los giros se controlan con el ángulo gδ que va a tener influencia en los esfuerzos aerodinámicos
del dirigible permitiéndole girar. La respuesta del ángulo de yaw se puede comparar con la
respuesta de un sistema integrador con un polo. Haciendo la identificación de los parámetros de
ganancia y ubicación del segundo polo por algoritmos genéticos, e incluyendo el lazo de control de
velocidad aerodinámica, se obtiene la función de transferencia mostrada en la ecuación (4-2).
( )( ) ( )
0.0004760.2g
ss s s
ψδ
−=
+
(4-2)
Los algoritmos genéticos se escogieron como algoritmo de identificación por ser una técnica
recursiva que permite minimizar una función que en este caso fue el error entre la respuesta del
sistema completo y la respuesta del sistema reducido. El algoritmo genético se corrió para un
tiempo de simulación igual a 300s . La referencia de velocidad aerodinámica era de 6.161m s y
una vez ésta hubiera llegado a su estado estacionario se aplicaba el pulso para gδ en 100t s=
con una duración de 50s y un valor de 2− ° . En la se muestra la validación del modelo reducido
obtenido para giros. En azul se muestra la respuesta del modelo completo y en verde la repuesta
del modelo reducido para el valor de la de entrada aplicada y descrita anteriormente. Las unidades
para los ángulos son radianes.
Figura 4-4. Validación del modelo lineal reducido de ángulo de yaw ψ

IEM-II-10-04
27
4.3.3 Modelo reducido de altitud
El control de altitud permitirá que el dirigible se mantenga a una altura deseada durante un tiempo
específico. La altura se controlará con el ángulo eδ que tiene influencia en el dirigible de tal
manera que le permite elevarse o descender.
La respuesta en altura del dirigible se puede comparar con la respuesta de un sistema integrador
con un polo. Haciendo la identificación de los parámetros de ganancia y ubicación del segundo
polo por algoritmos genéticos, e incluyendo los lazos de control de velocidad aerodinámica (control
PI) y de giros (control P), se obtiene la función de transferencia de la ecuación (4-3).
( )( ) ( )
0.0278531.0415e
ss s s
ψδ
=+
(4-3)
El algoritmo genético se corrió para un tiempo de simulación igual a 400s . La referencia de
velocidad era 6.161m s y una vez ésta hubiera llegado a su estado estacionario se aplicaba el
pulso para eδ en 100t s= con una duración de 100s y un valor de 10− ° .
La muestra en azul la respuesta del modelo completo y en verde la respuesta del modelo
reducido. Las unidades para los ángulos son radianes.
Figura 4-5. Validación del modelo lineal reducido de altitud Z

IEM-II-10-04
28
5 ESTRATEGIA DE CONTROL CLÁSICA
Para tener un punto de referencia y poder comparar los desempeños de los diferentes lazos de
control, se hizo un primer diseño con estrategias clásicas de control para cada uno de los modelos
enunciados en el capítulo anterior.
5.1 CONTROL DE VELOCIDAD AERODINÁMICA
La velocidad aerodinámica se controla gracias a un PI diseñado para el modelo reducido de
velocidad aerodinámica presentado en el capítulo anterior. El diseño se hizo por el lugar de las
raíces para las siguientes especificaciones: 1.2479ζ = y 22.7817sT s= . Estas especificaciones
se escogieron de tal manera que la respuesta fuera sobre amortiguada y que el tiempo de
respuesta de lazo cerrado fuera similar al tiempo de respuesta de lazo abierto. Aplicando las
condiciones de ángulo y de magnitud, se obtiene la función de transferencia para el controlador PI
que se muestra en (5-1).
( ) 1 140.308PI
sG s
s+⎛ ⎞= ⎜ ⎟
⎝ ⎠
(5-1)
En la Figura 5-1 se muestra la respuesta del modelo reducido de velocidad aerodinámica de la
ecuación (4-1).
Figura 5-1. Respuesta del modelo reducido de velocidad aerodinámica con un control PI

IEM-II-10-04
29
La respuesta del modelo completo al implementar el lazo de control de velocidad aerodinámica con
el PI de la ecuación (5-1) se muestra en la Figura 5-2. Así mismo se muestra su referencia y la
señal de control obtenidas.
Figura 5-2. Respuesta de la velocidad aerodinámica con un control PI y señal de control
Se puede observar que la respuesta del sistema completo no difiere de forma notoria de la
respuesta obtenida con el sistema reducido. Sin embargo se puede observar que la señal de
control alcanza unos valores más altos, de manera que el esfuerzo de control es mayor. Esto es
aceptable puesto que el sistema completo tiene en cuenta efectos que no se incluyen en el modelo
reducido, por lo que el control deberá actuar de manera más drástica.
5.2 CONTROL DE GIROS
Los giros, es decir el ángulo de yaw ψ , se controlan gracias a un regulador proporcional, ya que el
modelo reducido encontrado, dado en la ecuación (4-2), incluye un integrador. Para este caso se
obtuvo el valor de la ganancia, de tal forma que el control queda expresado como se muestra en la
ecuación (5-2).
( ) 50PgG s = −
(5-2)
En la Figura 5-3 se muestra la respuesta de este control sobre el modelo reducido de giros.

IEM-II-10-04
30
Figura 5-3. Respuesta del modelo reducido de giros con un control proporcional
La respuesta obtenida con este controlador sobre el modelo completo se muestra en la Figura 5-4,
al igual que la señal de control. En la Figura 5-5 se muestra la respuesta de la velocidad
aerodinámica, controlada por el control PI presentado anteriormente. Las señales en azul son las
referencias y las verdes corresponden a las respuestas del sistema
Figura 5-4. Respuesta del ángulo de giro ψ con un control proporcional y señal de control

IEM-II-10-04
31
Figura 5-5. Respuesta de la velocidad aerodinámica con un PI y giros con un P
Se puede observar que de la misma forma que como pasó con el control de velocidad
aerodinámica, la respuesta del modelo completo no varía de manera notoria con respecto a la
respuesta del modelo reducido. Sin embargo, observando la Figura 5-5, se puede decir que la
respuesta de la velocidad aerodinámica está relacionada con los giros. Al momento de realizar un
giro, se presenta una perturbación en la velocidad. El control implementado la corrige haciendo que
ésta vuelva a su valor de referencia deseado. Como el perfi l de pruebas incluye cuatro giros para
realizar un cuadrado, se presentan entonces cuatro perturbaciones en la velocidad.
5.3 CONTROL DE ALTITUD
La altura Z del dirigible se controla gracias a un PI diseñado a partir del modelo reducido
encontrado de la ecuación (4-3). La función de transferencia del controlador está dada por (5-3).
( ) ( )0.045PIz
sG s
s+
= −
(5-3)
Para evitar que la acción integradora del control actúe permanentemente, se saturó la referencia.
La respuesta obtenida para el modelo reducido se muestra en la Figura 5-6.

IEM-II-10-04
32
Figura 5-6. Respuesta del modelo reducido de altura Z con un control PI
La respuesta obtenida para este controlador se muestra en la Figura 5-7. También se muestran las
respuestas en velocidad aerodinámica (control PI) y giros (control P) en la Figura 5-8. Las señales
en azul son las referencias y las verdes corresponden a las respuestas del sistema. En la se
muestra el recorrido realizado por el dirigible
Figura 5-7. Respuesta en altitud Z con un control PI y señal de control

IEM-II-10-04
33
Figura 5-8. Respuesta de los tres lazos de control: velocidad aerodinámica, giros y altitud
Figura 5-9. Recorrido realizado por el blimp (sin viento y controles clásicos)
Observando los resultados obtenidos sobre el modelo completo, se puede decir que la estrategia
de control clásica es aceptable para el control de vuelo en la modalidad de crucero. Cabe anotar
que la altitud se ve bastante afectada por la velocidad aerodinámica, ya que cuando ésta última
varía, la altitud presenta perturbaciones que en este caso son corregidas por el control.

IEM-II-10-04
34
6 ESTRATEGIA DE CONTROL CON BACKSTEPPING
En este capítulo se presentan los diseños realizados siguiendo el algoritmo presentado en el
capítulo 3 y el algoritmo de backstepping sencil lo. De la misma forma que en el capítulo anterior, se
diseñaron tres lazos de control para velocidad aerodinámica, giros y altitud para los modelos
reducidos obtenidos y luego se probaron sobre el modelo completo. Para los casos de velocidad
aerodinámica y de giros no se mostrarán directamente los resultados sobre el modelo completo.
Sin embargo para el caso de altitud se mostrará en primer lugar el resultado obtenido para el
modelo reducido.
6.1 CONTROL DE VELOCIDAD AERODINÁMICA
Se retoma el modelo reducido lineal dado por la ecuación (4-1) que representa la velocidad
aerodinámica del dirigible en función de la fuerza motriz aplicada.
( )( )
0.875713.6 1
a
m
V sF s s
=+
(6-1)
En primer lugar se debe aumentar la planta incluyendo un integrador. Se obtiene entonces:
( ) ( )( )( )
**
0.875713.6 1aV
B sG s
s s A s= =
+
(6-2)
Esta expresión se puede expresar también como:
( ) ( )( )
*2
0.064390.07353aV
Y sG s
s s sU s= =
+
(6-3)
Donde ( )U s es el control que se está diseñando.
Ahora se debe encontrar una expresión en variables de estado del sistema aumentado.
( ) ( ) ( )2 0.06439 0.07353s Y s sU s sY s= −
(6-4)
( ) ( ) ( ) ( )0.06439sU s sB s U s W s= =
(6-5)

IEM-II-10-04
35
Reemplazando (6-5) en (6-4) se obtiene:
( ) ( ) ( )2 0.07353s Y s W s sY s= −
(6-6)
Se definen las variables de estado:
1
1 2
2 20.07353
x yx x yx y x w
== == = − +
& &
& &&
(6-7)
El sistema (6-3) queda entonces definido como:
1 2
2 2
1
0.07353x xx x wy x
== − +
=
&
&
(6-8)
Ahora se aplica el método recursivo de backstepping para calcular w . El control real u se obtiene
corriendo el integrador hacia atrás, es decir uti l izando la ecuación (3-12).
Paso 1: Se escoge la primera variable de error
1 1ref refe y y x y= − = −
(6-9)
La primera clf se define como:
21 1
12
V e=
(6-10)
La derivada de esta función está definida por:
( ) ( )1 1 1 1 1 1 2ref refV e e e x y e x y= = − = −& & & & &
(6-11)
La ecuación (6-11) debe ser definida negativa. Para cumplir esto se escoge el primer control virtual
1α de la siguiente manera.
( )1 2
1 2
2 1 1 1
0
0
d
d ref
d ref
xe x y
x y k e k
α =
− <
= − >
&
&
(6-12)
1 1 1refy k eα = −&
(6-13)

IEM-II-10-04
36
Paso 2: Se escoge la segunda variable de error
2 2 1 2 1 1 refe x x k e yα= − = + − &
(6-14)
La segunda clf se define como:
2 22 1 2
1 12 2
V e e= +
(6-15)
La derivada de esta función está definida por:
( )2 1 1 2 2 1 2 1 1 2 2V e e e e e e k e e e= + = − +& & & &
(6-16)
La ecuación (6-16) debe ser definida negativa.
( )( )
22 1 1 2 1 2
2 1 2
00
V k e e e ee e e
= − + + <
+ <
& &
&
(6-17)
2 1 2 2 2 0e e k e k= − − >&
(6-18)
Ahora se debe reescribir el sistema en las coordenadas ( )1 2,e e . Se obtiene entonces:
1 1 1 2
2 2 1
2 2 1 10.073529 ref
e k e ee xe x w y k e
α= − += −= − + − +
&
&& &
& && &
(6-19)
Reemplazando 1e& en términos de 1e y 2e en la última ecuación de (6-19), es tiene:
22 1 1 1 2 20.073529refe k e k e y x w= − + − − +& &&
(6-20)
Reemplazando en (6-20) el resultado de (6-18) resulta: 2
1 2 2 1 1 1 2 20.073529re fe k e k e k e y x w− − = − + − − +&&
(6-21)
Despejando el control w de la ecuación anterior: 2
1 2 2 1 1 1 2 20.073529refw e k e k e k e y x= − − + − + +&&
(6-22)
( ) ( )21 1 1 2 2 21 0.073529refw k e k k e y x= − + − + + +&&
(6-23)

IEM-II-10-04
37
Ahora se debe obtener la expresión de w en función de la referencia refy y la salida 1x . Pasando
la ecuación (6-23) al dominio de la frecuencia, se tiene:
( ) ( ) ( ) ( ) ( ) ( ) ( )2 21 1 1 2 2 21 0.073529refW s k E s k k E s s Y s X s= − + − + + +
( ) ( ) ( ) ( ) ( ) ( ) ( )2 21 1 1 1 2 2 10.073529refW s E s k E s k k E s s Y s sX s= − + − + + +
(6-24)
Se reemplaza en la ecuación (6-24) la expresión de ( )2E s dada en la ecuación (6-14):
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( )
21 1 1 1 2 2 1 1
210.073529
re f
ref
W s E s k E s k k X s k E s sY s
s Y s sX s
⎡ ⎤= − + − + + −⎣ ⎦+ +
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
2 21 1 1 1 2 2 1 1 1 2 1
21 2 10.073529ref ref
W s E s k E s k k X s k E s k k E s
k k sY s s Y s sX s
= − + − + − −
+ + + +
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
1 1 2 1 1 2 1
21 2 10.073529ref ref
W s E s k k sX s k k E s
k k sY s s Y s sX s
= − − + −
+ + + +
( ) ( )[ ] ( ) ( ) ( ) ( ) ( )21 1 2 1 2 1 11 0.073529ref refW s E s k k k k s Y s X s s Y s sX s⎡ ⎤= − + + + − + +⎣ ⎦
De la ecuación (6-9) se tiene que ( ) ( ) ( )1 1 re fE s X s Y s= − . Reemplazando lo anterior:
( ) ( )[ ] ( ) ( ) ( ) ( )21 1 2 1 2 1 11 0.073529refW s E s k k k k sE s s Y s sX s= − + − + + +
( ) ( ) ( ) ( ) ( )21 1 2 1 2 11 0.073529refW s E s k k k k s s Y s sX s= − + + + + +⎡ ⎤⎣ ⎦
De la ecuación (6-9) también se tiene que ( ) ( ) ( )1 1refX s Y s E s= + , entonces:
( ) ( ) ( ) ( ) ( ) ( )21 1 2 1 2 11 0.073529 0.073529ref refW s E s k k k k s s Y s sE s sY s= − + + + + + +⎡ ⎤⎣ ⎦
( ) ( ) ( ) ( )21 1 2 1 21 0.073529 0.073529 refW s E s k k k k s s s s Y s⎡ ⎤= − + + + − + +⎡ ⎤⎣ ⎦ ⎣ ⎦
Esta ecuación se puede escribir también como:
( ) ( ) ( ) ( ) ( ) ( ) ( )( )21 2 1 2 10.073529 0.073529 1ref refW s s s Y s s k k s k k Y s X s= + + − + + + + −⎡ ⎤⎣ ⎦
(6-25)

IEM-II-10-04
38
Si se reemplaza (6-25) en (3-12) se obtiene la expresión del control que se desea.
( ) ( )( )
( )0.064392
W s W sU s
sB s s= =
(6-26)
( ) ( )( ) ( )
( ) ( )( )1 2
1 2
1
10.0735290.073529
0.064392 0.064392ref ref
k kk kssU s Y s Y s X s
+⎡ ⎤− + + +⎢ ⎥+ ⎣ ⎦= + −
(6-27)
La dinámica resultante del sistema de error ( )1 2,e e está dada por la siguiente expresión:
( )
( ) ( ) ( )
12
2
11 2
2
1010
11
1
ksF s sI K
ks
s kF s s k s k
s k
−⎡ ⎤⎡ ⎤= − = − ⎢ ⎥⎢ ⎥ − −⎣ ⎦ ⎣ ⎦
+ −⎡ ⎤= = + + +⎢ ⎥+⎣ ⎦
( ) ( )21 2 1 2 1F s s k k s k k= + + + +
(6-28)
Se deben encontrar los valores adecuados para 1k y 2k . Si se observa con cuidado la expresión
(6-28). Un primer par de constantes se escoge según lo expuesto en [11]. Para este caso, las
constantes se escogieron así:
1 2 5k k= =
(6-29)
Para este caso la respuesta se muestra en la Figura 6-1.
Figura 6-1. Respuesta de
aV con integrador backstepping (k1 = k2 = 5) y señal de control

IEM-II-10-04
39
Este resultado no es el adecuado ya que tiene un sobrepico muy grande. Para mejorar este
problema, se hace el cálculo de las constantes 1k y 2k para diferentes valores de nω y 1ζ = .
Se puede notar que el término que corresponde a 2nω en la ecuación (6-28) debe ser mayor a 1.
Con esta restricción, el sistema resultante va a ser bastante rápido. Los valores que corresponden
al mayor tiempo de establecimiento son los resultantes para 1.01nω = y 1ζ = son:
1
2
0.012.01
kk
==
(6-30)
En la se muestra la respuesta de la velocidad aerodinámica y su referencia, y la señal de control
obtenidas para el modelo completo presentado en el capítulo 2.
Figura 6-2. Respuesta de
aV con integrador backstepping (k1=0.01,k2=2.01) y señal de control
Se puede observar que la respuesta mejoró teniendo un menor sobrepico. Además de utilizar los
valores de las constantes de (6-30), la señal de control se saturó más, obteniendo así un menor
esfuerzo de control.

IEM-II-10-04
40
6.2 CONTROL DE GIROS
Se retoma el modelo reducido lineal dado por (4-2) que representa el ángulo de yaw ψ y el
ángulo gδ aplicado.
( )( ) ( )
( )( )
0.0004760.2g
s B ss s s A s
ψδ
−= =
+
(6-31)
Si se sigue paso a paso el algoritmo explicado en el capítulo 3, pero sin aumentar la planta de tal
manera que se diseña una ley de control siguiendo el algoritmo de backstepping. Se encuentra
entonces la siguiente ley de control.
( ) ( )( ) ( )
( )( )( ) ( ) ( )1 2 1 2
1
1 0.2ref ref
p p p p s sA sU s Y s Y s X s
B s B s+ + + −
⎡ ⎤= + −⎣ ⎦
(6-32)
Siguiendo el resultado de [11], se escoge:
1 2 5p p= =
(6-33)
La respuesta obtenida con este controlador sobre el modelo completo se muestra en la Figura 6-3,
al igual que la señal de control. En la Figura 6-4 se muestra la respuesta de la velocidad
aerodinámica controlada con el integrador backstepping presentado anteriormente. Las señales en
azul son las referencias y las verdes corresponden a las respuestas del sistema.
Figura 6-3. Respuesta del ángulo de giro con un backstepping y señal de control

IEM-II-10-04
41
Figura 6-4. Respuesta de aV con integrador backstepping y giros con backstepping
6.3 CONTROL DE ALTITUD
Se retoma el modelo reducido lineal dado por (4-3) que representa la altura Z en función del
ángulo eδ aplicado.
( )( ) ( )
( )( )
0.0278531.0415e
s B ss s s A s
ψδ
= =+
(6-34)
Siguiendo los mismos pasos que para el control de giros, se encuentra la siguiente ley de control.
( ) ( )( ) ( )
( )( )( ) ( ) ( )1 2 1 2
1
1 1.0415ref ref
m m m m s sA sU s Y s Y s X s
B s B s+ + + −
⎡ ⎤= + −⎣ ⎦
(6-35)
Siguiendo el resultado de [11], se escoge
1 2 10m m= =
(6-36)
La respuesta obtenida para el modelo reducido con este control se muestra en la Figura 6-5.

IEM-II-10-04
42
Figura 6-5. Respuesta del sistema reducido de altitud con un control backstepping (m1=m2=10)
Si se observa la respuesta obtenida, se puede decir que es demasiado rápida, por lo que se sigue
el mismo procedimiento que se realizó para el control de velocidad. Y de la misma forma que en
ese caso, se escogieron las constantes de la siguiente forma:
1
2
0.012.01
mm
==
(6-37)
La respuesta obtenida para el modelo reducido con este control se muestra en la Figura 6-6.
Figura 6-6. Respuesta del sistema reducido de Z con control backstepping (m1=0.01,m2=2.01)

IEM-II-10-04
43
La respuesta para este caso es mejor pues no es tan exigente en cuanto a la velocidad del
sistema. Este resultado es el que se probará sobre el modelo completo. La respuesta obtenida
para este controlador se muestra en la Figura 6-7. También se muestran las respuestas en
velocidad aerodinámica (integrador backstepping) y giros (backstepping) en la Figura 6-8. En la
Figura 6-9 se muestra el recorrido realizado por el dirigible sin viento y con los controladores
anteriores.
Figura 6-7. Respuesta en Z con control backstepping (m1=0.01,m2=2.01) y señal de control
Figura 6-8. Respuesta de los tres lazos de control implementados con técnica backstepping

IEM-II-10-04
44
Figura 6-9. Recorrido realizado sin viento y con controles mediante backstepping
Se puede observar que la altura, aunque se mantiene en valores que están alrededor del punto de
operación, no llega a un estado estacionario. Esto se podría dar debido a que el control de giros
está implementado con el método de backstepping y si se observa la señal de control de este lazo,
se puede evidenciar una oscilación con una amplitud importante. Para descartar lo anterior, se
realizó una simulación con los lazos de control clásicos para la velocidad aerodinámica y para giros
y en altitud se implementó el resultado obtenido mediante backstepping. Los resultados se
muestran en las siguientes figuras.
Figura 6-10. Respuesta en altitud con backstepping (m1=0.01,m2=2.01) y señal de control

IEM-II-10-04
45
Figura 6-11. Respuesta de los tres lazos de control: aV (PI), giros (P) y Z (Backstepping)
Figura 6-12. Recorrido realizado sin viento: aV (PI), giros (P), Z (backstepping)
Se puede observar que la respuesta, aunque mejoró, no llega a tener un comportamiento como el
que se desea. Debido a esto, se puede decir que aunque backstepping es una técnica de control
robusto, su buen desempeño en este caso depende de los modelos reducidos escogidos. Para
este caso, se observa que el modelo reducido de altitud no es el adecuado para realizar el diseño
de un control mediante backstepping. El modelo debe contemplar más elementos del sistema
completo. Esto no sucede para los casos de velocidad aerodinámica y giros.

IEM-II-10-04
46
Para tratar de mejorar aún más la respuesta, se fi ltró la referencia con la siguiente función:
( ) 0.042 0.4 0.04
G sfiltro s s=
+ +
(6-38)
Los resultados se muestran en las Figura 6-13 y Figura 6-14. Haciendo esta modificación, la
implementación práctica de los controladores se facil ita. Se puede observar que la respuesta se
suaviza, sin embargo no hay cambios notorios en el desempeño de la altitud.
Figura 6-13. Respuesta de los tres lazos de control con backstepping y referencia filtrada
Figura 6-14. Recorrido para controles backstepping y referencia filtrada

IEM-II-10-04
47
7 PRUEBAS DE ROBUSTEZ
En este capítulo se presentan los resultados obtenidos al realizar algunas pruebas de robustez de
los controles diseñados y presentados en los capítulos anteriores.
7.1 APLICACIÓN DE VIENTO
En esta parte se muestran los resultados cuando se incluye viento.
7.1.1 Control clásico
Figura 7-1. Respuesta de los tres lazos con viento (control clásico)
Figura 7-2. Recorrido con viento (control clásico)

IEM-II-10-04
48
7.1.2 Control backstepping
Figura 7-3. Respuesta de los tres lazos con viento (control backstepping)
Figura 7-4. Recorrido con viento (control backstepping)

IEM-II-10-04
49
7.2 APLICACIÓN DE VIENTO Y RUIDO
En esta parte se muestran los resultados cuando se incluye viento y ruido.
7.2.1 Control clásico
Figura 7-5. Respuesta de los tres lazos con viento y ruido (control clásico)
Figura 7-6. Recorrido con viento y ruido (control clásico)

IEM-II-10-04
50
7.2.2 Control backstepping
Figura 7-7. Respuestas de los tres lazos con viento y ruido (control backstepping)
Figura 7-8. Recorrido con viento y ruido (control backstepping)

IEM-II-10-04
51
7.3 VARIACIÓN DE LA MASA
En esta parte se muestran los resultados cuando se varía la masa del dirigible. La masa agregada
se aumenta hasta 0.5kg. Además también se incluye viento y ruido.
7.3.1 Control clásico
Figura 7-9. Respuesta de los tres lazos con masa de 0.5kg, viento y ruido (control clásico)
Figura 7-10. Recorrido con masa 0.5kg, viento y ruido (control clásico)

IEM-II-10-04
52
7.3.2 Control Backstepping
Figura 7-11. Respuesta de los lazos con masa de 0.5kg, viento y ruido (control backstepping)
Figura 7-12. Recorrido con masa 0.5kg, viento y ruido (control backstepping)

IEM-II-10-04
53
7.4 CONCLUSIONES DE PRUEBAS DE ROBUSTEZ
Observando las respuestas de los diferentes casos, se puede decir:
• El viento no afecta el desempeño del sistema. Esto es lógico puesto que al controlar la
velocidad aerodinámica, ya se tiene en cuenta el viento. Esto se puede ver en la definición de
la velocidad aerodinámica. Esto sucede para ambos tipos de estrategia de control.
• La adición de ruido no genera inconvenientes. Para ambas estrategias, la adición de ruido no
genera cambios notorios en el recorrido resultante. Sin embargo en la señal de velocidad
aerodinámica se ve la forma en la que afecta este elemento. Esto se debe a la forma en la que
está aplicado el ruido. En este caso es una señal que va incluida en la señal de viento. Por esta
razón sólo se ve su influencia en la variable de velocidad.
• Con una masa adicional mayor, el desempeño del dirigible mejora. Para ambas estrategias, al
aumentar la masa adicional, la ruta resultante mejora puesto que una masa mayor hace que las
variaciones del ángulo de pitch sean menores o más difíciles de realizarse. Por esta razón los
resultados en altitud mejoran.

IEM-II-10-04
54
8 CONCLUSIONES
Se revisó el modelo disponible de un dirigible y se montó en SIMULINK de MATLAB para ser
uti l izado como simulador del dispositivo y hacer pruebas de diferentes estrategias de control. El
modelo es bastante elaborado y posee muchas variables por determinar para poder relacionarlo
con el dirigible adquirido por la Universidad. Esto exige pruebas aerodinámicas de tal manera que
todos los parámetros puedan ser identificados.
El desarrollo de la primera etapa del proyecto pone en evidencia la existencia de un acople entre
las diferentes señales de entrada al sistema, lo que determina la necesidad de hacer un desacople
de la matriz de transferencia del sistema de forma tal que se pueda ver como un conjunto de
sistemas monovariables y así poder implementar estrategias de control simples.
Las señales de referencia se escogieron de tal manera que el dirigible hiciera un recorrido
predeterminado. En el futuro, estas señales serán generadas por el planificador de trayectorias, el
cual tendrá que calcularlas para que el dispositivo se diri ja hacia la posición final deseada.
La técnica clásica util izada para el diseño de los controladores es de aplicación sencilla y además
genera resultados adecuados sobre el modelo completo del dirigible. En este caso se realizó el
control de la velocidad aerodinámica, control de giros y de altitud del blimp y en los resultados se
muestra el acople que existe entre estas variables, lo cual se menciona en el párrafo anterior.
Se estudió la técnica de backstepping como una alternativa para el control de las variables
mencionadas. Sin embargo, su aplicación no es tan sencil la ya que es necesario encontrar las
constantes de manera que todas las condiciones se cumplan y esta tarea no es fácil.
Para los modelos reducidos encontrados, la aplicación de la técnica de backstepping no es la más
adecuada puesto que son modelos lineales y por lo tanto una de las ventajas más importante de
dicha técnica no se aprovecha. Sin embargo se garantiza la estabil idad del sistema, lo cual es
importante.
La variable más crítica para controlar es la altura, ya que depende de varias variables y no
únicamente del ángulo eδ . De las simulaciones realizadas se puede concluir que la velocidad
afecta considerablemente la altura. A su vez, la velocidad es afectada por los giros y por lo tanto

IEM-II-10-04
55
éstos últimos también afectan la altura. Además los ángulos de entrada gδ y eδ dependen el uno
del otro. Por estos motivos, para futuros desarrollos se debería considerar la posibilidad de trabajar
con teorías para sistemas multivariables. Aunque se trató de mejorar la respuesta, ésta no llega a
tener el comportamiento deseado. Debido a esto, se puede decir que aunque backstepping es una
técnica de control robusto, su buen desempeño en este caso depende de los modelos reducidos
escogidos. Para este caso, el modelo reducido de altitud no parece ser el adecuado y debería
contemplar más elementos del sistema completo, contrario a lo que sucede con la velocidad
aerodinámica y los giros.
Observando los resultados obtenidos sobre el modelo completo, se puede decir que la estrategia
de control clásica es aceptable para el control de vuelo en la modalidad de crucero.
Además de todos los desarrollos matemáticos enfocados a diseñar las estrategias de control para
que el dirigible pueda realizar un vuelo autónomo, también se hicieron todas las diligencias para
adquirir el dirigible y los dispositivos necesarios para la instrumentación del mismo y la
implementación de los diseños realizados en la plataforma real. Igualmente se participó en el II
congreso de la región andina ANDESCON 2004.

IEM-II-10-04
56
BIBLIOGRAFÍA
[1] M. Arévalo, "Modelaje, identificación y simulación del sistema de vuelo de un dirigible," Tesis
de pregrado. Facultad de Ingeniería, Universidad de Los Andes, 2003. [2] E. Hygounenc, P. Souères, S. Lacroix, "Modélisation d’un dirigeable: étude de la cinématique
et de la dynamique," Rapport LAAS No. 00426, 2000. [3] E. Hygounenc, P. Souères, S. Lacroix, "Developments on autonomous airship control at
LAAS/CNRS," AIAA 14th Lighter than Air Convention and Exhibition, Akron, USA, Julio 2001. [4] E. Hygounenc, "Modélisation et commande d’un dirigeable pour le vol autonome," Thèse,
Rapport LAAS No. 035502, 2003. [5] E. Hygounenc, I-K. Jung, P. Souères. S. Lacroix, "The autonomous blimp project at
LAAS/CNRS: Achievements in fl ight control and terrain mapping", Rapport LAAS N°03181, Abril 2003.
[6] I. Kanellakopoulos, P. Kokotović , A. S. Morse, "Systematic design of adaptive controllers for
feedback linearizable systems," IEEE Trans. Automatic Control, vol. 36, pp. 1241-1253, 1991. [7] M. Krstić , I. Kanellakopoulos, P. Kokotović , Nonlinear and Adaptive Control Design. Wiley-
Interscience Publication, 1995. pp. 1-86. [8] A. R. Benasker, A. Desbiens, "Application of adaptive backstepping to the stabil ization of the
inverted pendulum", Department of Electrical and Computer Engineering, Université Laval, Quebec City (Québec), Canadá. 1998. Disponible en: www.gel.ulaval.ca/~desbiens/publications.html
[9] A. R. Benasker, A. Desbiens, "Backstepping-based adaptive PID control", Department of
Electrical and Computer Engineering, Université Laval, Quebec City (Québec), Canadá. 2002. Disponible en: www.gel.ulaval.ca/~desbiens/publications.html
[10] K. Astrom, B. Wittenmark, Adaptive control, Addison-Wesley, 1995. [11] A. R. Benasker, A. Desbiens, "Toward Industrial Process Control Application of the
Backstepping", Department of Electrical and Computer Engineering, Université Laval, Quebec City (Québec), Canadá. 2000. Disponible en: www.gel.ulaval.ca/~desbiens/publications.html
[12] A. Gauthier, L. Solaque, D. A. Patiño, M. C. Patiño, "Modelaje y Control de un Vehículo Aéreo
(blimp)", II Congreso Internacional de la Región Andina ANDESCON 2004, Bogotá, Colombia, Agosto 2004.
[13] A. Turner, "Development of a semi-autonomous control system for the UVA solar airship
AZTEC", University of Virginia, Mayo 2000. [14] J. G. Ramos, S. M. Maeta, M. Bergerman, S. S. Bueno, L. G. B. Mirisola, A. Bruciapaglia,
"Development of a VRML/Java Unmanned Airship Simulating Environment", IEEE/RSJ International Conference on Intell igent Robots and Systems, Kyongju, Korea, October 1999.
[15] M. J. López, F. Rodríguez, “Control adaptativo y robusto”, Universidad de Sevilla, 1996.

IEM-II-10-04
57
[16] R. Isermann, K. Lachmann, D. Marko, “Adaptive control systems”, Prentices Hall, 1992. [17] K. S. Narendra, A. M. Annaswamy, “Stable Adaptive Systems”, Prentice Hall, 1989. [18] L. Dugard, I. Landau, “Commande adaptive. Méthodologie et applications”, Hermès, Paris,
1988.