-
MJe
USA
TsunamiDispersive effectCoriolis effect
weaceanonl
fourntexat t
numerical experiments in an idealized ocean using Gaussian and
di-polar sources with different source
ulatinw waten wavstanda
et al. (2006) concluded that the development in time of the
wavefront is strongly connected to dispersion effects. Further
support-ing this conclusion, Glimsdal et al. (2006) and Grue et al.
(2008)showed, in their dispersive simulations of this event, that
an undu-lar bore could evolve in shallow water, in accordance with
othertsunami observations (Shuto, 1985). Finally, using the
dispersiveBoussinesq model FUNWAVE (Chen et al., 2000; Kennedy et
al.,
et al., 1990), dispersive Boussinesq models such as
FUNWAVE,which were initially developed for modeling ocean wave
transfor-mations from intermediate water depths to the coast, have
usuallybeen implemented in Cartesian coordinates without
Corioliseffects included. Lvholt et al. (2008) recently developed a
Bous-sinesq model in spherical coordinates, including Coriolis
effects.Their simulations quantied the effects of earths rotation
andthe importance of Coriolis forces on far-eld propagation
acrossthe Atlantic Ocean of a potential tsunami originated in La
Palma(Canary Islands).
Corresponding author. Tel.: +1 302 831 2438; fax: +1 302 831
1228.
Ocean Modelling 62 (2013) 3955
Contents lists available at
o
elsE-mail address: [email protected] (J.T. Kirby).satisfactory for
simulating tsunamis caused by smaller scale ormore concentrated
non-seismic sources, such as submarine massfailures (SMF) (e.g.,
Lvholt et al., 2008; Tappin et al., 2008). More-over, even for very
long waves such as found in co-seismic tsuna-mis, frequency
dispersion effects may become signicant in thelong distance
propagation of tsunami fronts. This was evidencedby Kulikovs (2005)
wavelet frequency analysis of satellite altime-try data recorded in
deep water in the Bay of Bengal during the2004 Indian Ocean
tsunami. Based on these, Kulikov concludedthat a dispersive long
wave model should be used for this event.In their dispersive
numerical simulation of this event, Horillo
Regarding effects of sphericity and earth rotation on
tsunamipropagation, even for the large 2004 event, numerical
resultsshowed that a Cartesian implementation of the models
(neglectingCoriolis effects) is adequate for regional scale tsunami
simulations,provided distances are corrected to account for earths
sphericity(e.g., Grilli et al., 2007; Ioualalen et al., 2007); this
is particularlyso when the main direction of propagation closely
follows a greatcircle. For global tsunami propagation, however,
sphericity andCoriolis effects might play a larger role in
simulating tsunami wavearrival at far distant sites. While standard
NSWE tsunami simula-tion models have typically included such
effects (e.g., Shuto1. Introduction
Conventional models used for simare traditionally based on the
shalloglect frequency dispersion effects ostudies, however, reveal
that these1463-5003/$ - see front matter 2012 Elsevier Ltd.
Ahttp://dx.doi.org/10.1016/j.ocemod.2012.11.009sizes. A simulation
of the Tohoku 2011 tsunami is used to illustrate the effects of
dispersive and Corioliseffects at large distances from the source
region.
2012 Elsevier Ltd. All rights reserved.
g global-scale tsunamisr equations, which ne-e propagation.
Recentrd models may not be
2000) to simulate the same event, Grilli et al. (2007) and
Ioualalenet al. (2007) quantied dispersive effects by performing
simula-tions with and without dispersive terms (thus solving
nonlinearshallow water equations (NSWE) in the latter case).
Differencesof up to 20% in surface elevations between Boussinesq
and NSWEsimulations were found in deeper water.Keywords:Boussinesq
wave model
source width, while the effect of the Coriolis force increases
with an increase of the source width. A sen-sitivity analysis to
dispersive and Coriolis effects is carried out using the numerical
model in a series ofDispersive tsunami waves in the
ocean:dispersion and Coriolis effects
James T. Kirby a,, Fengyan Shi a, Babak Tehranirad a,aCenter for
Applied Coastal Research, University of Delaware, Newark, DE 19716,
USAbDepartment of Ocean Engineering, University of Rhode Island,
Narragansett, RI 02882,
a r t i c l e i n f o
Article history:Received 15 February 2012Received in revised
form 12 November 2012Accepted 16 November 2012Available online 19
December 2012
a b s t r a c t
We derive fully nonlinear,a shallow, homogeneous odeveloped for
the weakly ndifference method with ascheme in time. In the
coscaling analysis reveals th
Ocean M
journal homepage: www.ll rights reserved.odel equations and
sensitivity to
ffrey C. Harris b, Stephan T. Grilli b
kly dispersive model equations for propagation of surface
gravity waves inof variable depth on the surface of a rotating
sphere. A numerical model isinear version of the model based on a
combined nite-volume and nite-th-order MUSCL-TVD scheme in space
and a third-order SSP RungeKuttat of tsunami generation and
propagation over trans-oceanic distances, ahe importance of
frequency dispersion increases with a decrease of the
SciVerse ScienceDirect
delling
evier .com/locate /ocemod
-
Dt0 w ; z h 8
where
DDt0
t0 u0
r0 cos h/
v 0r0h 9
Note that (8) allows for an imposed motion of the ocean bottom
tobe specied.
In Boussinesq or shallow water theory, it is typical to
replacethe local continuity equation (1) with a depth-integrated
conserva-tion equation for horizontal volume uxes. Integrating (1)
overdepth and employing the kinematic boundary conditions (7)
and(8) yields
r02jg0g0t0 r02jh0h0t0 1
cos h@
@/
Z g0h0
u0r0dz0( )
1cos h
@
@hcos h
Z g0h0
v 0r0dz0( )
0 10
This equation will be simplied below based on scaling
arguments.
2.1. Scaling
Based on the standard procedure for shallow water scaling,
weintroduce the length scales h00, a
00 and k
0, denoting a characteristic
odeBased on recent work summarized above, it appears that
theBoussinesq approximation may be a more accurate tool for
per-forming tsunami simulations relative to more conventional
modelsbased on the shallow water theory, since frequency dispersion
ef-fects are manifested in almost all cases, either at large
distances inlarger scale, co-seismic events, or at much shorter
distances insmaller scale SMF events. However, the computational
demandsof such simulations has been a concern. As pointed out by
Yoon(2002), Boussinesq models require vast computer resources dueto
the implicit nature of the solution technique used to deal
withdispersion terms. Some simulations may involve a wide range
ofscales of interest, from propagation out of the generation
region,through propagation at ocean basin scale, to runup and
inundationat affected shorelines (Grilli et al., 2007). Improvement
in modelefciency can be achieved by using nested grids (e.g.,
Ioualalenet al., 2007; Yamazaki et al., 2011; Son et al., 2011),
unstructuredor curvilinear grids (Shi et al., 2001) and
parallelization of the com-putational algorithms (Sitanggang and
Lynett, 2005; Pophet et al.,2011; Shi et al., 2012a).
In this study, we rigorously derive and validate equations for
adispersive Boussinesq model on the surface of a rotating
sphere,including Coriolis effects. The numerical scheme for the
weaklynonlinear case is developed following the recent work of
Shiet al. (2012a), who applied a TVD Riemann solver to
Boussinesqmodel equations of Chen (2006), extended to incorporate a
movingreference level as in Kennedy et al. (2001). The model is
imple-mented using a domain decomposition technique and uses MPIfor
communication in distributed memory systems. The relativeimportance
of frequency dispersion and Coriolis effects in tsunamipropagation
is evaluated both theoretically and based on numeri-cal simulations
of an idealized case. The basic capability of themodel for
computing basin-scale tsunami propagation is thendemonstrated using
the 2011 Tohoku event; more detail of thisparticular case may be
found in Grilli et al. (2012a), where an ear-lier version of the
present model based on depth-averaged veloci-ties is used.
2. Model equations in spherical polar coordinates
We consider the motion of a uid column with variable stillwater
depth h0/; h on the surface of a sphere of radius r00 to thestill
water level, where coordinates r0; h;/ denote radial distancefrom
the sphere center, latitude, and longitude, with the local
ver-tical coordinate dened as z0 r0 r00 (Fig. 1). In this
coordinatesystem, the dimensional Euler equations describing the ow
ofan incompressible, inviscid uid are given by (Pedlosky,
1979,Section 6.2),
w0z0 2w0
r0 1r0 cos h
v 0 cos hh 1
r0 cos hu0/ 0 1
du0
dt0 u
0
r0w0 v 0 tan h 2X0w0 cos h v 0 sin h 1
qr0 cos hp0/ 2
dv 0
dt0 1r0v 0w0 u02 tan h 2X0 sin hu0 1
qr0p0h 3
dw0
dt0 u
02 v 02r0
2X0 cos hu0 1qp0z0 g 4
where X0 is the spheres angular velocity around the absolute
verti-cal axis, u0 and v 0 are positive velocity components in the
horizontalEasterly (/) and Northerly (h) directions respectively,
and w0 de-notes the local vertical velocity. In the selected
coordinate system,the total time derivative operator is dened
as,
0 0
40 J.T. Kirby et al. / Ocean Mddt0
t0 u
r0 cos h/
vr0h w0z0 5Boundary conditions consist of a dynamic condition
specifyingpressure ps on the free surface,
p0s/; h; t0 0; z0 g0 6together with a kinematic constraints on
the velocity eld at thesurface and bottom boundary. The kinematic
surface boundary con-dition (KSBC) is given by
Dg0
Dt0 w0; z0 g0 7
and the (kinematic) bottom boundary condition (BBC) is given
by
Dh0 0 0 0
Fig. 1. Coordinate system for model development corresponding to
Eqs. (1)(4).
lling 62 (2013) 3955water depth, wave amplitude (or amplitude of
bottom displace-ment), and horizontal length; with the latter
remaining to be
-
odeexamined. Combining these scales with each other and with
r00yields a family of dimensionless parameters: h00=r00 denotingthe
relative depth or thickness of the ocean layer; l h00=k0, theusual
parameter characterizing frequency dispersion in Boussinesqtheory;
and d a00=h00, the shallow water nonlinearity parameter.The
parameter takes on values of O103 at maximum, and willthus always
be taken to indicate vanishingly small effects when itoccurs in
isolation.
Based on this family of parameters, we scale z-direction
quanti-ties by as,
h; z h0; z0h00
; g g0
a0011
We take u00 dc00 dgh00
qto denote a scale for horizontal veloci-
ties, and let w00 denote a scale for vertical velocities, so
that,
u;v u0;v 0u00
; w w0
w0012
Pressure is scaled by the weight of the static reference
watercolumn
p p0
qgh0013
We introduce a rescaling of the dimensionless latitude and
longi-tude according to
/; h r00
k0/; h l
/; h 14
This gives horizontal coordinates which change by O1 amountsover
distances of Ok0. Retaining terms to O, the nondimensionalform of
the continuity equation (1) is then given by
w00u00
wz 2w l1 zcos h u/ v cos hh O
2 15
indicating that w00=u00 Ol, as is usual in a Boussinesq or
shallow
water model framework. Turning to the depth-integrated mass
con-servation equation (10), we introduce the total depth,
H h dg 16and obtain
1dHt 1cos h Hu/ Hv cos hh O 17
where
u;v 1H
Z dgh
u; vdz 18
are depth-averaged horizontal velocities, and where time t0 is
scaledaccording to
t x0t0 gh00
qk0
t0 19
In keeping with the notion that waves which are short relative
tothe basin scale (k0=r00 or =l 1) may have frequencies which
arehigh relative to the earths rotation rate (x0=X0 1), we
introducethe scaling
X lX0
x0 O1 20
(Comparing to other treatments of this problem, we note that
thischoice leads to a nondimensional Coriolis termwith an explicit
scal-ing that changes its size in the Boussinesq regime in
comparison to
J.T. Kirby et al. / Ocean Mthe shallow water regime, in contrast
to the model equations inLvholt et al. (2008) or Zhou et al.
(2011), for example, where therelative size of local acceleration
and Coriolis terms in differentscaling limits is not apparent).
Turning to the Easterly / momen-tum equation (2), we obtain
ut l
fv d ucos h
u/ vuh wuz luv tan h
d1
cos hp/
O 21where the dimensionless Coriolis parameter is dened asf 2X
sin h. Similarly, the Northerly h momentum equation (3)becomes,
v t l
fu d ucos h
v/ vvh wvz lu2 tan h
d1ph O 22
The dimensionless vertical momentum equation is nally given
by
dl2 wt d ucos hw/ vwh wwz h i
pz 1 O 23
In the following, we consider two relations between and l:(1)
the regime l O, which recovers the shallow waterequations; and (2)
the regime l O1=3, which yields theBoussinesq approximation. As a
further note on the apparentscaling of the Coriolis parameter, f,
consider the usual denition
of the dimensional Rossby deformation radius R0 gh00
q=f 0
gh00q
=2X0 sin h. In the present scaling, we obtain f r00=R0 or
l
f k
0
R024
which shows that the shallow water regime and Boussinesq
regimecan be thought of as covering waves which are O1 in length
ormuch shorter than the Rossby deformation radius, respectively,the
Coriolis effects being weaker in the latter case.
2.2. Shallow water equations
Most theories of transoceanic tsunami propagation are basedon
either the nonlinear shallow water equations (NSWE), or
theirlinearized form, in recognition of the vanishing effects of
disper-sion l! 0 for very long waves. In the present discussion,
thislimit is obtained when the horizontal length scale of
wavemotion approaches the horizontal scale of a global-sized
oceanbasin, or k0 ! r00. This implies that the ratio =l O1,
whileterms proportional to l appearing alone are essentially the
sizeof already neglected terms of O. In this combined limit,
thelocal vertical momentum equation (23) reduces to a
hydrostaticbalance, which may be integrated down from the free
surfaceto yield
p dg z 25This expression is used to evaluate pressure gradient
terms in thehorizontal momentum equations, yielding the nal set of
shallowwater equations
1dHt 1cos h Hu/ Hv cos hh 0 26
ut fv dcos h uu/ cos hvuh sin huv 1
cos hg/ 0 27
v t f u dcos h uv/ cos hvvh sin hu2 gh 0 28
lling 62 (2013) 3955 41where, in this limit, the scaled latitude
and longitude revert to theoriginal values. Eq. (26) retains the
possibility of describing wave
-
evolution in shallow coastal margins as well as mainly linear
evo-
odelution in the deep ocean basin, we will retain the mechanics
ofthe fully nonlinear Boussinesq model framework, following
theapproach of Chen (2006) and Shi et al. (2012a) but working inthe
framework of rotating ow. As in those studies, we use hori-zontal
velocity ua at a reference level za as the dependent variableas a
means of providing more accurate frequency dispersioneffects as
well as for connecting the model more directly tolocal-scale models
in Cartesian coordinates. In developing themodel, we seek to retain
terms to Ol2 without any truncationin orders of d. This is in
contrast to the classical Boussinesqapproach, which would take d
Ol2 and truncate terms ofOd2; dl2;l4 and higher.
In the derivation, we retain the effect of an imposed
bottommotion h/; h; t. The approximation is accompanied by
theassumption that l O1=3. For O103, this implies a dis-persion
term l O101, which would be reasonable for theusual surface wave
problems. This choice of scaling then impliesthat O=l Ol2,
indicating that Coriolis terms and undifferen-tiated advective
acceleration terms are the same size as the lead-ing-order
deviation of the pressure term from a hydrostaticbalance.
2.3.1. Pressure and vertical momentumPressure in the system
being considered will deviate from
hydrostatic by Ol2 amounts. Denoting this non-hydrostatic
com-ponent by ~p, we write
p/; h; z; t ph/; h; z; t dl2~p/; h; z; t dg z dl2~p 29
Introducing (29) in (23) and integrating up to the free
surface(where ~p 0) gives
~pz Z dgz
wtdz dZ dgz
ucos h
w/ vwh wwzh i
dz O 30
The weakly nonlinear approximation with d=l2 O1would retain
~pz Z 0z
wtdz Od 31
2.3.2. The vertical structure of velocitiesIn order to use (30)
to evaluate horizontal pressure gradients,
we need to establish a relation between w and components
u;vthrough the continuity equation (15), which simplies to
wz lcos h u/ v cos hh O 32
Integrating (32) from h to z and using the bottom boundary
con-dition gives
1 @Z z 1 @ Z z 1generation through a bottom motion ht , which
appears at O1=dsince h0 is scaled by h00 rather than wave
amplitude. This is impor-tant for modeling time dependent tsunami
sources, such as occurfor large co-seismic events (e.g., Indian
Ocean in 2004 or Tohokuin 2011) or for landslide tsunamis.
2.3. The Boussinesq approximation
We now wish to retain dispersive effects to leading order inthe
description of wave motion. Further, in order to provide a
uni-formly valid model which can be used to describe nonlinear
wave
42 J.T. Kirby et al. / Ocean Mwzcosh @/ h
udz cosh @h h
v coshdz dht 33We now follow Nwogu (1993) and Chen (2006) and
express thehorizontal velocities using Taylor series expansions
about a refer-ence depth za. This approach, together with the
closure assumptionthat horizontal components of vorticity are zero
at leading order,expressed through
uz l2 w/
cos h Ol4; ; vz l2wh Ol4; 34
leads to the following expressions for the velocity
components,
uz ua l2
cos hza zA/ 12 z
2a z2B/
Ol4; 35
vz va l2 za zAh 12 z2a z2Bh
Ol4; 36
wz A Bz 37
where
A 1dht 1cos h fuah/ va cos hhh g;
B 1cos h
fua/ va cos hh g 38
The vertical vorticity associated with (35) and (36) is given
by
x x0 l2x2z Ol4; 39with
x0 1cos hva/ uah 40
and
x2 1cos h fAhza/ Bhzaza/ A/zah B/zazah g
tan hcos h
A/ za z B/ z2a
2 z
2
2
dhdh
41
In contrast to the case in Cartesian coordinates, the Ol2
contribu-tion to the vorticity here is depth dependent. In the
Boussinesqregime, however, we have dh=dh l2 and thus the
additionaltime-dependent term is of Ol4 overall, moving it outside
theapproximate equations developed here. We thus denotex2z ~x2
l2x^2z and neglect x^2 from further analysis.
2.3.3. Fully nonlinear Boussinesq equationsFully nonlinear
Boussinesq equations are obtained rst by
using the expressions (35)(37) to evaluate the pressure eld(30),
giving
~pz l2 DaA dABz dg DaB dB2h i z2 dg2
2
!( )42
where
Da t dua
cos h/ vah
n o43
is a total derivative following the horizontal motion in the
local tan-gent plane. Substitution of Eqs. (35)(37) into the /
momentumequation (21) gives the approximate horizontal
momentumequation
uat l2fva 1
cos hg/ d
uaua/cos h
vauah l2uava tan h
l2V /1 V /2 V /3 z Ol4; 44
lling 62 (2013) 3955where
-
uaA/ 1 2
J.T. Kirby et al. / Ocean Modelling 62 (2013) 3955 43za dg cos h
vaAh 2 A dgB /46
V /3 z dva ~x2 dx0 za zAh z2a z2
2
Bh
47
Similarly, the h momentum equation can be written as
vat l2fua gh duava/cos h
vavah l2u2a tan h
l2V h1 V h2 V h3 z Ol4; 48where
V h1 z2a2Bth zaAth dg
2
2
Bt
h dgAth
49
V h2 dz2a dg2
2
!uaB/cos h
vaBh
za dg uaA/
cos h vaAh
(
12A dgB 2
)h
50
V h3 z dua ~x2 dx0cos h
A/ za z B/ z2a z22
51
At this level of approximation, all z-dependence is contained in
thedispersive terms V3. In order to obtain a reduced-dimension,
Bous-sinesq type system, we follow Chen (2006) and average (47)
and(51) over depth to obtain the expressions
V /3 dva ~x2 dx0 Ah12z2a
16dg2 dgh h2h i
Bh za 12 dg h
52
and
V h3 dua ~x2 dx0cos h
B/12z2a
16dg2 dgh h2
B/ za 12 dg h
53
To complete the set of Boussinesq equations, the continuity
equa-tion (17) is written by expressing u and v in terms of ua and
va,giving
1dHt 1cos h M
// Mh cos hh
n o O;l4 54
where the volume ux components in / and h are given by
M/ H ua l2
coshza12hdg
A/ z2a
2h
2hdgdg26
!B/
" #( )
Mh H val2 za12hdg
Ah z2a
2h
2hdgdg26
!Bh
" #( )55
2.3.4. Weakly nonlinear approximationThe standard weakly
nonlinear Boussinesq approximation fol-
lows from the assumption that d Ol2, leading to the
immediateneglect of all terms of Odl2 in Eqs. (44), (48) and (54).
The result-ing set of approximate momentum equations are given byV
/1 1
cos hz2a2Bt/ zaAt/ dg
2
2
Bt
/ dgAt/
( )45
V /2 d
cos hz2a dg2
2
!uaB/cos h
vaBh (
uat l2fva 1
cos hg/ d
uaua/cos h
vauah
l2 eV /1 Ol4; dl2; 56
where
eV /1 1cos h zaAt/ z2a2 Bt/
57
and
vat l2fua gh duava/cos h
vavah
l2 eV h1 Ol4; dl2; 58
where
eV h1 zaAth z2a2 Bth
59
The approximate volume uxes in (56) follow from (55) and are
gi-ven by
M/ Hua l2
cos hh za 12 h
A/ z2a
2 h
2
6
!B/
" #
Mh Hva l2h za 12 h
Ah z2a
2 h
2
6
!Bh
" #60
We note that the scaling automatically eliminates the
undifferenti-ated advective acceleration terms in (56) and (58).
These terms arealso absent in the weakly nonlinear model of Lvholt
et al. (2008)but are retained in the model of Zhou et al.
(2011).
3. Numerical approach
The fully nonlinear system described here provides a
compre-hensive model for studying tsunamis from the earliest stages
ofgeneration to the nal stages of shoreline inundation and runup.As
pointed out in Lvholt et al. (2008), there are possible advanta-ges
to the fully nonlinear system particularly in the study of
thedevelopment of undular bores over shelf regions, where
weaklynonlinear models are known to over-predict bore
undulationheights (Wei et al., 1995). However, it is our usual
practice to sim-ulate nearshore propagation and inundation using
the correspond-ing model system in Cartesian coordinates, as
described in Shi et al.(2012a) and used recently in Grilli et al.
(2012a). For simplicity, weillustrate the numerical implementation
of the weakly nonlinearsystem (56)(60) here and obtain a model
which is suitable forthe generation and propagation studies
considered in the followingexamples.
Recent progress in the development of Boussinesq-type wavemodels
using a combined nite-volume and nite-difference TVDschemes has
shown robust performance of the shock-capturingmethod in simulating
breaking waves and coastal inundation(Tonelli and Petti, 2009;
Roeber et al., 2010; Shiach and Mingham,2009; Erduran et al., 2005,
and others). In this study, we appliedthe MUSCL-TVD scheme in space
and a high-order RungeKuttascheme in time with adaptive time
stepping.
3.1. Conservative form of governing equations
The numerical implementation is based on dimensional formsof the
weakly nonlinear governing equations, augmented by
termsrepresenting bottom friction. We also neglect the direct
generationof waves due to bottom motion. The model equations are
given by
-
odeHt 1r0 cos h Hua/ Hva cos hhn
1r20 cos h
h za 12h
A/ z2a
2 h
2
6
!B/
!" #/
1r20
h cos h za 12h
Ah z2a
2 h
2
6
!Bh
!" #h
) 0 61
uat fva 1
r0 cos huaua/ 1r0 vauah
gr0 cos h
g/
1r20 cos h
zaAt/ z2a
2Bt/
Cd
Hjuajua
0 62
vat fua 1
r0 cos huava/ 1r0 vavah
gr0gh
1r20
zaAth z2a
2Bth
Cd
Hjuajua 0 63
with
A hua/ hva cos hhcos h
; B ua/ va cos hhcos h
64
and where Cd represents a drag coefcient. The system of
Eqs.(61)(63) corresponds to the Nwogu-type equations used inLvholt
et al. (2008). In order to apply the combined nite-volumeand
nite-difference schemes, the governing equations (61)(63)are
re-arranged to a conservative form following Shi et al.(2012) for
the fully non-linear Boussinesq equations in Cartesiancoordinates.
We dene
n1 r0 cos h0/ /0n2 r0h h0
65
where /0; h0 are the reference longitude and latitude,
respectively.n1; n2 represent coordinates in the longitude and
latitude direc-tions, respectively. The conservative form of
(61)(63) can be writ-ten as
@W@t
r HW S 66
where W and HW are the vector of conserved variables and theux
vector function, respectively, and are given by
W H
U
V
0B@1CA; H
SpPi Q jSpP2
H 12 Spgg2 2ghh i
i PQH jSpPQH i Q
2
H 12 gg2 2ghh i
j
0BBB@1CCCA 67
where Sp is a spherical coordinate correction factor given
by
Sp cos h0cos h 68
P Hua hu1 and Q Hva hv1, in which u1; v1 are dened by
u1 za h2
Sp Sphuan1n1 hvan1n2 1r0
tan hhvan1
z2a
2 h
2
6
!Sp Spuan1n1 van1n2
1r0
tan hvan1
69
v1 za h2
Sphuan1n2 hvan2n2 1r0tan hhvan2
!
44 J.T. Kirby et al. / Ocean M z2a
2 h
2
6Spuan1n2 van2n2
1r0tan hvan2
70The conserved variables U and V in (67) are given by
U Hua F 71
V Hva G 72in which
F z2a
2S2puan1n1
z2a2Sp van1n2
1r0
tan hvan1
zaS2phuan1n1
zaSp hvan1n2 1r0
tan hhvan1
73
and
G z2a
2Spuan1 n2
z2a2
van2n2 1r0tan hvan2
zaSphuan1 n2 za hvan2n2
1r0tan hhvan2
74
S in (66) represents a source array given by
S
1r0tan hHva hv1
Spgg @h@n1 fHva Cduau2a v2a
p w1gg @h
@n2 fHua Cdva
u2a v2a
p w20BB@
1CCA 75where
w1 gtF u1 hSpuau1n1 vau1n2 Spu1uan1 v1uan2 76
w2 gtG v1 hSpuav1n1 vav1n2 Spu1van1 v1van2 77The surface
elevation gradient term was split into
12 Spgg2 2gh; 12 gg2 2gh
in (67) and Spgghn1 ; gghn2 in (75)in order to use a
well-balanced numerical scheme (Shi et al.,2012a).
Eq. (66) is solved using the MUSCL-TVD scheme and the
HLLapproximate Riemann solver. A MUSCL-TVD scheme up to
thefourth-order in space (Yamamoto and Daiguji, 1993) and a
third-order Strong Stability-Preserving (SSP) RungeKutta
(Gottliebet al., 2001) in time were adopted. Model implementation
also in-cludes wave breaking and wettingdrying schemes for
shallowwater, as described in Shi et al. (2012a).
3.2. Parallelization
In parallelizing the computational model, we use the
domaindecomposition technique to subdivide the problem into
multipleregions and assign each subdomain to a separate processor
core.Each subdomain region contains an overlapping area of ghost
cellsthree rows deep, as dictated by the 4th order computational
stencilfor the leading order non-dispersive terms. The Message
PassingInterface (MPI) with non-blocking communication is used to
ex-change data in the overlapping region between neighboring
pro-cessors. Velocity components are obtained from Eqs. (46)
and(47) by solving tridiagonal matrices using the parallel
pipeliningtridiagonal solver described in Naik et al. (1993).
To investigate the performance of the parallel program,
numer-ical simulations of an idealized ocean case were rst tested
withdifferent numbers of processors on the linux cluster
mills.hpc.ude-l.edu using a heterogeneous set of nodes consisting
of nodes with242.4 GHz cores and 64 GB of memory or 482.4 GHz cores
and128 GB of memory per node. Tests here were conducted using
24core nodes. The test case uses a numerical grid of dimension5400
3600. Fig. 2 shows the model speedup versus number ofprocessors for
tests with 1, 8, 16, 24, 36, 48 and 64 processors.
lling 62 (2013) 3955The effect of inter-node communication is
noted as the computa-tion moves from one to two nodes (above 24
processors) and fromtwo to three nodes (above 48 processors), but
overall performance
-
Fig. 3 illustrates variations of l2 and =l with respect to l
or
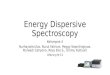
Fig. 4. Geometries for (a) a dipolar source and (b) a Gaussian
source used in modeltesting.
J.T. Kirby et al. / Ocean Modeh0=W , where W represents the
characteristic width of the tsunamisource. Typically, for a source
width of 100 km (for example, the2004 Indian Ocean tsunami), l
0:025 and the Coriolis effectis satisfactory in comparison to an
ideal arithmetic speedup basedon performance using a single
processor.
4. Tests of dispersion and Coriolis effects
The orders of the frequency dispersions terms and Coriolisterms
in Eqs. (47) and (48) are Ol2 and O=l, respectively.The relative
importance of frequency dispersion and Coriolis forcecan be
evaluated using l2 and =l values in some specic cases.
Fig. 2. Variation in model performance with number of processors
for a5400 3600 domain. Straight line indicates arithmetic speedup.
Actual perfor-mance shown by circles.would be expected to be
relatively more important than dispersionas shown in Fig. 3. This
result would apply to all co-seismic sourceswith widths in the
range 50 6W 6 500 km, for which0:01 6 l 6 0:1. For narrower sources
with widths on the order of25 km or less, l values lie to the right
of the intersection point in
Fig. 3. Relative importance of Coriolis force (=l) and frequency
dispersion (l2)with varying inverse source width l h0=W .(b)(a)
lling 62 (2013) 3955 45Fig. 3, indicating that dispersive
effects are as important as theCoriolis effect, and get relatively
more important as the sourcewidth diminishes. Nevertheless, in the
examples considered below,we nd that Coriolis effects are uniformly
less important than dis-persion effects for all the cases
considered, even though the scalingindicates otherwise.
4.1. Idealized tsunami sources and examples
There is a signicant lack of benchmark examples that can beused
as test cases for the determination of accuracy of
sphericalcoordinate ocean wave models. Shi et al. (2012b) have
describedthe testing of an earlier version of the present code,
based ondepth-averaged velocity, against the standard tsunami
benchmarktests provided by Synolakis et al. (2007). Here, we
compare modelresults to several of the detailed measurements
obtained fromDART buoys during the 2011 Tohoku-oki tsunami event.
Beforeturning to the realistic example, we rst illustrate the
dependenceof the maximum wave height envelope on the effect of
dispersiveand Coriolis effects using idealized sources which may be
taken tobe indicative either of localized SMF events or of
co-seismic eventswith limited lateral extent.
We utilize two idealized sources here: an initial
Gaussianelevation
-
ode46 J.T. Kirby et al. / Ocean Mg/; h A exp r20
W2/ /c2 h hc2
78
with center at /c; hc, nominal source width W and amplitude
A,and a dipolar initial displacement given by
g/; h 22
p
Wr0/ /c exp
r20W2
/ /c2 h hc2
79
where the orientation of the dipole may be changed by altering
therst / /c factor. The shapes of these initial forms are shown
inFig. 4. Of these two, the dipolar source is most representative
of tsu-nami-like sources, and could represent either the net upward
anddownward displacement of an Okada-like source, or the net
effectof lateral translation or rotation of an SMF event.
We consider an idealized ocean and use a model grid in
spher-ical coordinates with a at bottom bathymetry over the
entireocean basin. The computational domain is in the northern
hemi-sphere and covers a region from 10N to 50N in the
south-northdirection and from 20W to 20E in the west-east
direction. Waterdepth h 3000 m over the whole domain. The grid
resolution is0:750. As is classically done in tsunami analyses, the
bottom defor-mation is transferred to the spherical Boussinesq
model as an
Fig. 5. (a) Dipolar initial condition (W 0:25 , Pa 2:5), (b)
dipolar initial condition (Winitial condition (W 0:25 , Pa 2:5),
(e) Gaussian initial condition (W 0:5 , Pa 5:0lling 62 (2013)
3955initial free surface condition with no initial uid velocities,
speci-ed by either (78) or (79).
4.2. Source size and wave dispersion effect
The rst set of examples considers the effect of varying
sourcewith on the rate of appearance of dispersive effects, using
both ofthe source congurations considered above. Results are
analyzedin light of a parameter due to Kajiura (1963), given by
Pa 6hL 1=3 W
h
80
where h is ocean depth, W is source width (as an indicator of
ba-sic wavelength), and L denotes travel distance. Kajiura
indicatesthat dispersive effects should begin to become apparent
whenthe value of the Pa, which decreases with travel distance,
dropsbelow 4.
Fig. 5 shows a snapshot at time t 5000 s of the NE quadrant
ofwave trains evolving from both sources (78) and (79) with
varyingsource widths. Panels (a)(c) correspond to a dipolar source
ori-ented in the EW direction, while panels (d)(f) correspond
toGaussian sources. Panels (a) and (d) correspond to a narrow
initial
0:5 , Pa 5:0), (c) dipolar initial condition (W 1:0 , Pa 10:0),
(d) Gaussian), and (f) Gaussian initial condition (W 1:0 , Pa
10:0), T 5000 s.
-
odeJ.T. Kirby et al. / Ocean Msource withW 0:25, corresponding
to an SMF-sized source witha width of about 25 km, with parameter
Pa 2:5, indicating thestrong evolution of a dispersive wave train
at the time of 1.4 h afterevent initiation. In contrast the lower
panels (c) and (f) represent asource with initial width W 1 or
about 100 km, consistent witha larger co-seismic slip event. At
this elapsed time of 1.4 h, Pa 10and dispersive effects are not
apparent, indicating that dispersion(as manifested by the presence
of an oscillatory wave train) isnot likely to occur for the rst
several hours during the evolutionof a wave train from a classic
co-seismic event.
Figs. 6 and 7 show the effect of dispersion on the spatial
patternof maximum wave height for a strongly dispersive case. Fig.
6(a)and (b) shows the wave elds at t 5000 s for dispersive and
non-dispersive calculations, respectively, for the dipolar source
withinitial W 0:25, corresponding to Fig. 5(a). Fig. 6(c) shows
thespatial pattern of the difference in wave height envelope for
thesimulations with and without dispersion, and shows that there
isa general tendency towards a decrease in wave height along
theprinciple propagation direction when dispersion is taken into
ac-count. (This tendency also occurs in the realistic simulations
ofthe Tohoku-oki event shown below, although the tendency is
re-versed at distances which are relatively shorter (higher Pa)
than
Fig. 6. Dipolar initial condition with EW orientation and W 0:25
. (a) With dispersivdifference in wave height envelope,
dispersivenondispersive. Plots are in percent of mlling 62 (2013)
3955 47the distances considered here, possibly due to complex
refrac-tion/diffraction effects over the variable ocean
bathymetry.) Simi-lar results occur for the Gaussian source as
indicated in Fig. 7,aside from a more uniform distribution of
results due to the ini-tially symmetric source.
Figs. 8 and 9 provide a more detailed picture of the evolution
ofthe dispersive wave train evolving from the dipolar or
Gaussiansources respectively, with W 0:25 in either case. In each
panel(a)(f), a distance D
gh
pt along an EW transect through the
source center is chosen, and then a time series of the
resultingwave form passing that point is constructed with the time
axisshifted by the amount t, to obtain an arrival time of zero for
a non-dispersive wave in Cartesian coordinates. In each gure, the
dis-tance of the measurement point from the source origin along
theEW direction varies from 308.6 km (at top) to 1851.8 km (at
bot-tom), corresponding to values of Pa falling from 3.11 to 1.71.
In thiscase, frequency dispersion is seen to be important at all
displayeddistances from the source, and the evolved wave train
representsan extensive packet of waves with a gradually decreasing
waveperiod as the wave passes a xed point, indicting the
expectedsorting of longer and shorter waves due to phase speed
depen-dence on frequency.
e terms, Pa 2:5, t 5000 s; (b) without dispersive terms, Pa 2:5,
t 5000 s; (c)aximum initial displacement, equal to 1 m.
-
ode48 J.T. Kirby et al. / Ocean M4.3. Coriolis effect on an
idealized source
The examples presented in the previous section included
Corio-lis effects in the computations. Corresponding runs without
Corio-lis were found to have only minor effects on the outcome, in
linewith the case study of the Tohoku-oki event discussed in the
fol-lowing section. In this section, we consider an additional
idealizedcase of a dipolar source centered at 50N with a NS
orientation.This latitude corresponds to Aleutian Island sources,
and is chosenso as to give a source located in a region with
elevated rotationaleffects. The source considered here has a width
W 0 4 or about300 km, which is still considerably smaller than an
estimate ofthe Rossby radius of deformation of 1800 km for a water
depthof h0 4 km and this latitude. Correspondingly, Coriolis
effects onthe solution are still weak at this latitude. Fig. 10
illustrates a com-parison of the maximum wave height envelope after
10 h of simu-lation for cases with and without Coriolis included,
with solidcontours corresponding to the case with Coriolis and
dashed con-tours corresponding to the case without. Contour levels
correspondto percentage of the initial source height. Coriolis is
seen to lead toa somewhat more rapid decay of the wave height with
distanceform the source center. The results also indicate that the
resultswith Coriolis are somewhat asymmetrical in the EW
direction,
Fig. 7. Gaussian initial condition with W 0:25 . (a) With
dispersive terms, Pa 2:5, theight envelope,
dispersivenondispersive. Plots are in percent of maximum initial
displling 62 (2013) 3955with wave heights being larger to the East,
or left, of the maindirection of propagation. This is a seemingly
paradoxical result,as we may expect the tendency of Coriolis to
deect motions tothe right in the Northern hemisphere to cause
greater wave heightsto the right of the propagation direction, as
illustrated in the nextsection for the Tohoku-oki event. In order
to examine this further,we consider an idealized case of diplolar
sources with NS and EW orientation with Coriolis either included or
neglected. Thesource geometry and latitude are unchanged. Fig.
11(a) and (b) dis-play results with and without Coriolis force
included for the samecase as in Fig. 10. Fig. 11(c) shows the
difference between run withCoriois (a) and the run without Coriolis
(b). The most obvious effectnoted here is that Coriolis tends to
trap a portion of the initial waveclose to its original position,
leading to a persistent dipolar featurenear the source center at
(50N, 0E). The pattern also indicatesthat the evolving wave form
with Coriolis is somewhat lower inamplitude to the right of the
Southerly propagation direction, inagreement with Fig. 10. The
waveform with Coriolis also has a low-er amplitude at the leading
edge of the spreading wave, indicatingthat Coriolis is reducing
wave propagation speed to a small extent.The dipolar source with EW
orientation (Fig. 11(d)(f)) also showsa reduction in wave speed
induced by Coriolis and a tendency totrap a portion of the initial
wave form near the source location.
5000 s; (b) without dispersive terms, Pa 2:5, t 5000 s; (c)
difference in wavelacement, equal to 1 m.
-
((
(
odeJ.T. Kirby et al. / Ocean MAt the propagation distances shown
here, there is no clear ten-dency for the evolving waves to be
deected to the right or leftof the principle propagation direction.
See the following sectionfor indications of this sort of behavior
for much larger propagationdistances in a realistic event.
Overall, the effect of Coriolis terms on evolving tsunami
wavefronts appears to be of minimal importance, as noted in a
numberof earlier investigations (Kowalik et al., 2005; Lvholt et
al., 2008).
4.4. The 2011 Tohoku-oki tsunami
The ability of the new spherical Boussinesq model to
simulatebasin-scale tsunami events is demonstrated in this section
byapplying the model to the recent March 11th, 2011 M9 Tohoku-oki
earthquake. During this event, an extremely devastating tsu-nami
was generated in the near-eld while a signicant tsunamiwas observed
at many far-eld locations. Grilli et al. (2012a) pro-vide a
detailed account of the event, the earthquake source, thenear- and
far-eld tsunami observations, and tsunami generationand propagation
modeling using both the Cartesian version (Shiet al., 2012a) and an
earlier spherical version of FUNWAVE-TVDbased on depth-averaged
velocity. Here, we present results of sim-
(
(
(
Fig. 8. Evolution of dispersive (solid line) and nondispersive
(dashed line) wave trains forand eastward propagating waves,
respectively. Measurement locations are at D
gh
pt
5400 s and 925.8 km; (d) 7200 s and 1234.5 km; (e) 9000 s and
1543.1 km; and (f) 10,8a)
b)
c)
lling 62 (2013) 3955 49ulations with the weakly-nonlinear
spherical Boussinesq modeldescribed above. We specically analyze
effects of dispersion andCoriolis terms in the model equations on
simulated maximum tsu-nami elevation in the Pacic Ocean.
Comparisons are made basedon measured and modeled time series at
the location of four DARTbuoys, one near Japan (21418), one off
Oregon (46404), one nearHawaii (51407), and one near Panama (32411)
as shown inFig. 14, and on a comparison of synoptic maps of maximum
waveheight envelopes for the entire Pacic basin.
As in Grilli et al. (2012a), the computational domain covers
aregion of the Pacic Ocean from 60S to 60N in the
south-northdirection, and from 132E to 68W in the west-east
direction(Fig. 12). In the present simulations, the grid resolution
is im-proved to 20 compared to the 40 resolution used in Grilli et
al.(2012a). Bathymetry is specied in the model based on the ETO-PO1
10 data base. In these simulations, we use the tsunami sourceof
Grilli et al. (2012a), which is based on the 3D FEM model
ofMasterlark (2003). This source, denoted UA, was derived from
acombination of seismic and GPS inversion to specify the
earth-quake-induced bottom uplift or subsidence as a function of
time.The model simulations here do not make use of any
hydrody-namic data in the determination of the source
conguration.
d)
e)
f)
a dipolar source with initial widthW 0:25 . Left and right
panels show westwardwith h 3000 m and t, D = (a) 1800 s and 308.6
km; (b) 3600 s and 617.3 km; (c)00 s and 1851.8 km.
-
ode50 J.T. Kirby et al. / Ocean MThe non-hydrostatic model
NHWAVE (Ma et al., 2012) is used tosimulate the rst 5 min of
tsunami generation, as in Grilli et al.(2012a), using a smaller and
ner local 1 km resolution Cartesiangrid (see red rectangle in Fig.
12), based on the UA source.
(
(
(
(
(
(
Fig. 9. Gaussian source, pa
Fig. 10. (a) Comparison maximum recorded surface elevation
(relative to initial source asimulated time. Dipolar source with
width W 0 4:0) oriented in NorthSouth directionlling 62 (2013)
3955NHWAVE results for surface elevation and depth-averaged
hori-zontal velocity at t 5 min are then interpolated over the
spher-ical Boussinesq model grid, in which computations are
theninitiated as a hot start. For a more detailed description of
model
a)
b)
c)
d)
e)
f)
rameters as in Fig. 8.
mplitude) with Coriolis (solid lines) and without Coriolis
(dashed lines) after 10 h of.
-
Fig. 11. Surface elevation comparison at T 7200 s for dipolar
sources with initial widthW 4 and (a) NorthSouth orientation with
Coriolis, (b) NorthSouth orientationwithout Coriolis, (c) (a,b),
(d) EastWest orientation with Coriolis, (e) EastWest orientation
without Coriolis, and (f) (d,e).
Fig. 12. Computational domain for far-eld simulations with
FUNWAVE-TVD, with the marked location of all DART buoys in the
region (labeled red dots used incomparisons). The smaller red box
marks the location of NHWAVEs regional computational domain (Grilli
et al., 2012a,b). (For interpretation of the references to color in
thisgure legend, the reader is referred to the web version of this
article.)
J.T. Kirby et al. / Ocean Modelling 62 (2013) 3955 51
-
Fig. 13. Comparison between measured surface elevation at DART
buoys (black) and model simulations using full model including
dispersion and Coriolis effects. Simulationsare based on the
seismic/GPS UA source described in Grilli et al. (2012a). Buoy
numbers and lead in model arrival time are (a) 21418, 0 min; (b)
51407, + 5 min; (c) 46404, +
ilita
52 J.T. Kirby et al. / Ocean Modelling 62 (2013) 3955setup, as
well as a more comprehensive comparison of observa-tions and model
results based on the depth-averaged velocity for-mulation, see
Grilli et al. (2012a).
Fig. 13 shows a comparison of DART buoy measurements and
6 min, and (d) 32411, +10 min. Model results are offset by the
indicated shift to facfull model predictions (retaining dispersion
and Coriolis) at thefour selected locations. Timing of arrival of
the main tsunami peak
Fig. 14. Model predicted surface elevations at DART buoys: (a)
21418, (b) 51407, 4640dashed line), and no dispersion/Coriolis
(green dashed line). (For interpretation of the refarticle.)at the
nearest buoy 21418 is accurate, and the wave form is repro-duced
accurately aside from a trailing high frequency wave trainthat
follows the main peak in the observations. (Grilli et al.(2012b)
have recently speculated that the primary source of this
te wave form comparisons.early manifesting, shorter period (34
min) wave train is an SMFsource located to the north of the main
coseismic slip.) Using an
4, and (d) 32411. Full model (blue line), no dispersion (red
line), no Coriolis (blueerences to color in this gure legend, the
reader is referred to the web version of this
-
estimated source width W 0 100 km and an average depth ofh0 4
km, an estimated travel distance of 1300 km at buoy21418 gives a
value Pa 6:6, indicating that dispersive effectsshould not be
apparent for waves generated by the main co-seis-mic source. At
more distant buoys, the model results lead the mea-surements in
arrival timing, with a progressive increase in leadtime with
distance from the initial event source. Approximate leadtimes are
300 s at 51407, 360 s at 46404, and 600 s at 32411. Thistiming
discrepancy could be due to a number of factors,
includingdeviations from sphericity, errors in bathymetry, errors
in leadingorder model dispersion, and truncation errors associated
with dis-cretization. We have not done simulations at a higher
resolution of1 min in order to test convergence, but note that
results at 2 minresolution are signicantly improved over results at
4 min resolu-tion, where timing discrepancies are larger (Grilli et
al., 2012a).
Fig. 13(b)(d) display model results with the leading shift in
timeremoved in order to facilitate comparisons of the modeled
waveforms. The results at the three distant buoys indicate that the
mod-el accurately predicts the evolution of the leading features of
thetsunami wave train, with good reproduction of the sequence,
per-iod and amplitudes of arriving wave crests.
The effects of Coriolis force and frequency dispersion are
illus-trated by comparing numerical results obtained with and
withouteach term in the model equations in Fig. 14. Fig. 14(a)
shows thatthe effect of frequency dispersion on the wave train is
signicantalready at buoy 21418, where a forward steepening of the
nondis-persive wave form is apparent in comparison to the wave
formwith dispersion retained, although no oscillatory dispersive
tailhas appeared yet. The differences between dispersive and
nondis-persive calculations increase with distance from the source,
and, bythe farthest buoy 32411, dispersion has created a wave train
withsignicant following crests that are largely absent in the
nondis-persive case, as would be expected. The parameter Pa takes
onapproximate values of 3.9, 3.7 and 3.0 at buoys 51407, 46404and
32411, respectively, indicating that dispersive effects shouldonly
be mildly apparent at the two intermediate buoys, and rela-tively
more apparent at the most distant buoy, as is seen in themodel
results. In contrast, the gure shows that the effect of Cori-olis
terms on the calculation is indistinguishable, at least at
theparticular buoy locations considered.
Fig. 15 summarizes the synoptic results. The center panel
dis-plays the envelope of maximum water surface elevation for
thecomplete model. The upper panel displayed the difference of
themodel results with dispersion and the model results without
dis-persion. The presence of dispersion in the calculation leads to
localchanges in maximum wave height envelope of up to 20 cm even
in
J.T. Kirby et al. / Ocean Modelling 62 (2013) 3955 53Fig. 15.
Envelope of maximum computed wave elevation with FUNWAVE-TVD
inspherical (20) Pacic grid: difference between maximumwave height
envelope with
and without dispersion (upper panel); result with dispersion and
Coriolis terms(center panel); and difference between maximum wave
height envelope with andwithout Coriolis terms (lower panel).Fig.
16. Percent change in maximum wave height envelope for the
Tohoku-okitsunami for (top) simulations with and without dispersion
and (bottom) simula-tions with and without Coriolis.
-
odethe deep ocean, which represents a signicant deviation in
modelpredictions with and without dispersion incorporated. In
contrast,the lower panel in Fig. 15 indicates that the effect of
Coriolis on thecalculation is relatively minor, with deviations in
wave amplitudeon the order of a centimeter over the entire ocean
basin. The pres-ence or absence of Coriolis effects in the
calculations does not leadto a practical difference in the form or
amplitude of modeled wavesfor the Tohoku-oki simulation. Coriolis
force causes waves to theright of the main direction of travel to
be generally higher thanthey would be without it, indicating a
subtle shift of the initial pro-gressive wave pattern to the right
of the rotation-free direction ofpropagation in the generation
region, consistent with results for EW oriented dipolar sources in
the Northern hemisphere in the pre-vious section.
Fig. 16 provides an additional view of the synoptic results,
withthe absolute wave height difference plots of Fig. 15 being
replacedby plots of percent change resulting from taking the ratio
of thedifference plots to the full model simulation. The top panel
indi-cates that dispersion has a pronounced effect on wave height
dis-tribution in the far eld. There is an overall tendency for
thedispersive simulation to lead to a reduction of wave height in
therelative near eld down wave of the source. However, this
effectis partially reversed in the far eld, where waves are often
signi-cantly larger in the dispersive case than the nondispersive
case.This effect is partially due to a simple spatial shifting of
concen-trated wave energy in lateral directions, as evidenced by a
patternof positive and negative deviations along transects
perpendicularto the main propagation direction. However, there is a
net overalltendency towards increased wave height in the far eld,
indicatinga systematic change in wave form due to dispersive
effects.
In contrast, percent changes due to Coriolis effects are on the
or-der of a few percent at most, and are likely to be insignicant
rel-ative to uncertainties in source conguration and other factors
in arealistic simulation. Changes along the main propagation
directionare on the order of 3% in the far eld. These values are
consistentwith previous results for simulations of the Cumbre Vieja
volcanoevent described by Lvholt et al. (2008). The maximum effect
ofCoriolis is noticed along boundaries to the north and east (or
tothe left of the main propagation direction) where Coriolis
effectsreduce wave heights by up to 5%, and to the south and west
(orto the right of the main propagation direction), where results
arerelatively increased, particularly in regions that are strongly
shad-owed by island chains.
5. Conclusions
We have derived fully nonlinear Boussinesq equations forweakly
dispersive wave propagation on the surface of a rotatingsphere,
including Coriolis effects. The model equations incorporateimproved
dispersion following Nwogu (1993) and Lvholt et al.(2008). The
weakly nonlinear version of the model is implementedusing a
Godunov-type method with a fourth-order MUSCL-TVDscheme in time and
a third-order SSP RungeKutta scheme. Themodel is implemented using
a domain decomposition techniqueand optimized for parallel computer
clusters using MPI. Modelspeedup tests with multiple processors
show a nearly linear speed-up, suggesting that such a Boussinesq
model can be efciently usedfor modeling global wave
propagation.
A scaling analysis indicates that the importance of
frequencydispersion should increase with a decrease in tsunami
sourcewidth, and that effects of Coriolis force should increase
with an in-crease of the source width. The importance of dispersive
effectsboth in the far eld of large sources as well as in the near
eld of
54 J.T. Kirby et al. / Ocean Mcompact, SMF-like sources is
established using idealized examples.In contrast, it is seen that
tsunami wave trains corresponding totypical wavelengths for
co-seismic events are relatively unaffectedby rotational effects,
and it is unclear that their retention in themodel is a necessary
part of obtaining realistic simulations. Theseresults are in line
with recent suggestions of Kowalik et al. (2005)and Lvholt et al.
(2008, 2012). As the Coriolis terms do not repre-sent a difculty in
developing the numerical scheme itself, though,there is little
reason to argue that they should not be retained
forcompleteness.
A simulation of the Tohoku-oki event and comparison to far-eld
DART buoy observations provides a strong test of the accuracyof the
seismic/GPS source developed by Grilli et al. (2012a), whichappears
to be the most accurate available co-seismic source amongthose
which are developed without input from hydrodynamic data.(For
contrast, see the recent work of Lvholt et al. (2012), wherethe
inclusion of hydrodynamic measurements is probably thestrongest
factor guiding the choice of source conguration.) Grilliet al.
(2012b) have recently hypothesized that an additional SMFcomponent
of the event is crucial to an overall understanding ofthe observed
tsunami properties, both in terms of modeling coastalinundation and
in reproducing short period oscillations observedin GPS and closer
DART buoy records. The far eld DART buoy re-cords examined here do
not provide a clear picture of these addi-tional short wave
effects, as they have either dispersed at thesedistances or are
buried within additional under-resolved scatteringeffects from
nearby shelf and coastal boundaries.
Acknowledgements
The authors wish to acknowledge support from the NationalTsunami
Hazard Mitigation Program (NOAA). Harris and Grilliacknowledge
support from Grant EAR-09-11499/11466 of the USNational Science
Foundation (NSF) Geophysics Program. Kirbysportion of the linux
cluster Mills was supported by the Ofce ofNaval Research and the
University of Delaware.
References
Chen, Q., 2006. Fully nonlinear Boussinesq-type equations for
waves and currentsover porous beds. J. Eng. Mech. 132, 220230.
Chen, Q., Kirby, J.T., Dalrymple, R.A., Kennedy, A.B., Chawla,
A., 2000. Boussinesqmodeling of wave transformation, breaking and
runup. II: two horizontaldimensions. J. Waterway, Port, Coastal
Ocean Eng. 126, 4856.
Erduran, K.S., Ilic, S., Kutija, V., 2005. Hybrid nite-volume
nite-difference schemefor the solution of Boussinesq equations.
Int. J. Numer. Methods Fluids 49,12131232.
Glimsdal, S., Pedersen, G., Atakan, K., Harbitz, C.B.,
Langtangen, H., Lvholt, F., 2006.Propagation of the December 26,
2004 Indian Ocean tsunami: effects ofdispersion and source
characteristics. Int. J. Fluid Mech. Res. 33 (1), 1543.
Gottlieb, S., Shu, G.-W., Tadmor, T., 2001. Strong
stability-preserving high-ordertime discretization methods. SIAM
Rev. 43 (1), 89112.
Grilli, S.T., Ioualalen, M., Asavanant, J., Shi, F., Kirby,
J.T., Watts, P., 2007. Sourceconstraints and model simulation of
the December 26, 2004 Indian Oceantsunami. J. Waterway, Port,
Coastal Ocean Eng. 133, 414428.
Grilli, S.T., Harris, J.C., Tajalli Bakhsh, T., Masterlark,
T.L., Kyriakopoulos, C., Kirby,J.T., Shi, F., 2012a. Numerical
simulation of the 2011 Tohoku tsunami based on anew transient FEM
co-seismic source: comparison to far- and near-eldobservations.
Pure Appl. Geophys..
http://dx.doi.org/10.1007/s00024-012-0528-y.
Grilli, S.T., Harris, J.C., Tappin, D.R., Masterlark, T., Kirby,
J.T., Shi, F., Ma, G., 2012b. Amultisource origin for the
Tohoku-oki 2011 tsunami earthquake and seabedfailure. Nature Comm.,
submitted for publication.
Grue, J., Pelinovsky, E.N., Fructus, D., Talipova, T., Kharif,
C., 2008. Formation ofundular bores and solitary waves in the
Strait of Malacca caused by the 26December 2004 Indian Ocean
tsunami. J. Geophys. Res. 113, C05008.
http://dx.doi.org/10.1029/2007JC004343.
Horillo, J., Kowalik, Z., Shigihara, Y., 2006. Wave dispersion
study in the IndianOcean-tsunami of December 26, 2004. Marine
Geodesy 29, 149166.
Ioualalen, M., Asavanant, J., Kaewbanjak, N., Grilli, S.T.,
Kirby, J.T., Watts, P., 2007.Modeling the 26th December 2004 Indian
Ocean tsunami: case study of impactin Thailand. J. Geophys. Res.
112, C07024. http://dx.doi.org/10.1029/2006JC003850.
Kajiura, K., 1963. The leading wave of a tsunami. Bull.
Earthquake Res. Inst. 41, 535571.
lling 62 (2013) 3955Kennedy, A.B., Chen, Q., Kirby, J.T.,
Dalrymple, R.A., 2000. Boussinesq modeling ofwave transformation,
breaking and runup. I: one dimension. J. Waterway, Port,Coastal
Ocean Eng. 126, 3947.
-
Kennedy, A.B., Kirby, J.T., Chen, Q., Dalrymple, R.A., 2001.
Boussinesq-type equationswith improved nonlinear performance. Wave
Motion 33, 225243.
Kowalik, Z., Knight, W., Logan, T., Whitmore, P., 2005.
Numerical modeling of theglobal tsunami: Indonesian tsunami of 26
December 2004. Sci. Tsunami Haz. 23,4056.
Kulikov, E., 2005. Dispersion of the Sumatra tsunami waves in
the Indian Oceandetected by satellite altimetry. Rep. from P.P.
Shirshov Institute of Oceanology,Russian Academy of Sciences,
Moscow
Lvholt, F., Pedersen, G., Gisler, G., 2008. Oceanic propagation
of a potential tsunamifrom the La Palma Island. J. Geophys. Res.
113, C09026. http://dx.doi.org/10.1029/2007JC004603.
Lvholt, F., Kaiser, G., Glimsdal, S., Scheele, L., Harbitz,
C.B., Pedersen, G., 2012.Modeling propagation and inundation of the
11 March 2011 Tohoku tsunami.Nat. Haz. Earth Syst. Sci. 12,
10171028.
Ma, G., Shi, F., Kirby, J.T., 2012. Shock-capturing
non-hydrostatic model for fullydispersive surface wave processes.
Ocean Modell. 4344, 2235.
Masterlark, T., 2003. Finite element model predictions of static
deformation fromdislocation sources in a subduction zone:
sensitivities to homogeneous,isotropic, Poisson-solid, and
half-space assumptions. J. Geophys. Res. 108(B11).
http://dx.doi.org/10.1029/ 2002JB002296, 17pp.
Naik, N.H., Naik, V.K., Nicoules, M., 1993. Parallelization of a
class of implicit nitedifference schemes in computational uid
dynamics. Int. J. High Speed Comput.5, 150.
Nwogu, O., 1993. Alternative form of the Boussinesq equations
for nearshore wavepropagation. J. Waterway, Port, Coastal Ocean
Eng. 119, 618638.
Pedlosky, J., 1979. Geophysical Fluid Dynamics. Springer-Verlag,
New York, 624pp.Pophet, N., Kaewbanjak, N., Asavanant, J.,
Ioualalen, M., 2011. High grid resolution
and parallelized tsunami simulation with fully nonlinear
Boussinesq equations.Comput. Fluids 40, 258268.
Roeber, V., Cheung, K.F., Kobayashi, M.H., 2010. Shock-capturing
Boussinesq-typemodel for nearshore wave processes. Coastal Eng. 57,
407423.
Shi, F., Dalrymple, R.A., Kirby, J.T., Chen, Q., Kennedy, A.B.,
2001. A fully nonlinearBoussinesq model in generalized curvilinear
coordinates. Coastal Eng. 42, 337358.
Shi, F., Kirby, J.T., Harris, J.C., Geiman, J.D., Grilli, S.T.,
2012a. A high-order adaptivetime-stepping TVD solver for Boussinesq
modeling of breaking waves andcoastal inundation. Ocean Modell.
4344, 3651.
Shi, F., Kirby, J.T., Tehranirad, B., 2012b. Tsunami benchmark
results for sphericalcoordinate version of FUNWAVE-TVD (Version
1.1). Research Report No. CACR-12-02, Center for Applied Coastal
Research, University of Delaware, Newark.
Shiach, J.B., Mingham, C.G., 2009. A temporally second-order
accurate Godunov-type scheme for solving the extended Boussinesq
equations. Coastal Eng. 56,3245.
Shuto, N., 1985. The Nihonkai-Chubu earthquake tsunami on the
north Akita Coast.Coastal Eng. Jpn. 28, 255264.
Shuto, N., Goto, C., Imamura, F., 1990. Numerical simulation as
a means of warningfor near eld tsunamis. Coastal Eng. Jpn. 33,
173193.
Sitanggang, K., Lynett, P., 2005. Parallel computation of a
highly nonlinearBoussinesq equation model through domain
decomposition. Int. J. Numer.Methods Fluids 49, 5774.
Son, S., Lynett, P.J., Kim, D.-H., 2011. Nested and
multi-physics modeling of tsunamievolution from generation to
inundation. Ocean Modell. 38, 96113.
Synolakis, C.E., Bernard, E.N., Titov, V.V., Kanoglu, U.,
Gonzlez, F.I., 2007. Standards,criteria, and procedures for NOAA
evaluation of tsunami numerical models.NOAA Tech, Memo. OAR
PMEL-135, Pacic Mar. Env. Lab., Seattle.
Tappin, D.R., Watts, P., Grilli, S.T., 2008. The Papua New
Guinea tsunami of 1998:anatomy of a catastrophic event. Nat. Haz.
Earth Syst. Sci. 8, 243266.
Tonelli, M., Petti, M., 2009. Hybrid nite volumenite difference
scheme for 2DHimproved Boussinesq equations. Coastal Eng. 56,
609620.
Wei, G., Kirby, J.T., Grilli, S.T., Subramanya, R., 1995. A
fully nonlinear Boussinesqmodel for surface waves. I. Highly
nonlinear, unsteady waves. J. Fluid Mech.294, 7192.
Yamamoto, S., Daiguji, H., 1993. Higher-order-accurate upwind
schemes for solvingthe compressible Euler and NavierStokes
equations. Comput. Fluids 22, 259270.
Yamazaki, Y., Cheung, K.F., Kowalik, Z., 2011. Depth-integrated,
non-hydrostaticmodel with grid nesting for tsunami generation,
propagation, and run-up. Int. J.Numer. Methods Fluids 67,
20812107.
Yoon, S.B., 2002. Propagation of distant tsunamis over slowly
varying topography. J.Geophys. Res. 107, C10.
http://dx.doi.org/10.1029/2001JC000791, 3140.
Zhou, H., Moore, C.W., Wei, Y., Titov, V.V., 2011. A nested-grid
Boussinesq-typeapproach to modelling dispersive propagation and
runup of landslide-generated tsunamis. Nat. Haz. Earth Syst. Sci.
11, 26772697.
J.T. Kirby et al. / Ocean Modelling 62 (2013) 3955 55
Dispersive tsunami waves in the ocean: Model equations and
sensitivity to dispersion and Coriolis effects1 Introduction2 Model
equations in spherical polar coordinates2.1 Scaling2.2 Shallow
water equations2.3 The Boussinesq approximation2.3.1 Pressure and
vertical momentum2.3.2 The vertical structure of velocities2.3.3
Fully nonlinear Boussinesq equations2.3.4 Weakly nonlinear
approximation
3 Numerical approach3.1 Conservative form of governing
equations3.2 Parallelization
4 Tests of dispersion and Coriolis effects4.1 Idealized tsunami
sources and examples4.2 Source size and wave dispersion effect4.3
Coriolis effect on an idealized source4.4 The 2011 Tohoku-oki
tsunami
5 ConclusionsAcknowledgementsReferences