Embed Size (px)
Citation preview

AD-A012 292
POBAL-S, THE ANALYSIS AND DESIGN OF A HIGH ALTITUDE AIRSHIP
Jack D. Beemer, et a&
Raven Industries, Incorporated
Prepared for:
Air Force Cambridge Research Laboratories
15 February 1975
DISTRIBUTED BY:
National Technical Information ServiceU. S. DEPARTMENT OF COMIERCE
REPRODUCED FROMBEST AVAILABLE COPY

S~~ArC1 %i.''-- 1-120
S• POBAL-Sp THE AMMYSIS AND DESICN OF A RI•GH
Loren L. Rueter• • Paul R. saufarer
SLaDell R. Swiden'
R -xen industries, Ynccrporated•i Sioux Falls, South Dakota 57101
S~15 February 197t
SFinal Report for Period October 1972 -March'1975
74
'J:• Approved for public releasel distribut-on unlimited
m• Reproducad by6',• :, NATIONAL TECHNICAL• • ,'• '• •:•IN F O R M A T IO N S E R V IC E
SSpfin,.d, VA, 22151 D D
OALR ?ME SYSTEMS CCW )D E) I
V~jVW 9VU T ARSIR OP JL1
•"• ":'• SOK ArB,.NA5SACHUSZTTS 01731
Iac . . .. - ll IiI - ........ "l... .. - ........ -. .. ... ..---. _. ... . . . .. ... ... . . ... .. . . .. ,._. . .S:., .= Pau • -- Seufer...er ... .. ...- :..... ....... ....... : ....... : -

unclas s~ified -. ~
Raven Industries, Incorporated Unclassified
Sioux Falls, South Dakota 571013. RPORTTITIPOBAL-S, THE ANALYSIS AND DESIGN OF A HIGH ALTITUDE AIRSHIP
S 4. OKSCfIPIVK NOTES Misse of report and inclusive dale.)
Scientific Final for Period October 1972 - March 19755. A U T H o R (Pits f name. middle iniftial, eat o -name)
Jack D. Beemer (principal author), Roger Re Parsons, Loren L. Ruetert,Paul A. Seuferer, LaDell Re Swiden
6- REPORT OATC 7a. TOTAL NO, OF PAGES 7b. NO. OF RKPS
15 February 1975 18I2SC. CONTRACT OR GRANT NO. jS.ORIGINATOR'S REPORT NLJMISR(S)
F19628-73-C-0076b.POKTNO. R-0275006
6665-10-010. 9b. OTHER REPORT NOM5 (Any other numbers that may be assigned
62101F thie *Port,)
4,686665 AFCRL-TR-75-0120M10, DI3¶RtIOUTION STATEMENT
Approved for public release; distribution unlimited.
It. SUPPLEMENTARY NOTES 12. SPONSORING MILI TARY ACTI VITY
It. ISTACTContract Monitor: Arthur 0. Korn/LCBI
An engineering analysis and development effort has been executedto design a superpressure airship, POBAI1-S, capable of station keepingat an altitude of 21 kilometers for a duration of 7 days while support-ing a payload weighing 890 newtons and requiring 500 watts of electricalpower. A detailed parametric trade-off between various' power sourcesand other design choices was performed. The computer program used toaccomplish this analysis is described and many results are presented.The system concept which resulted was a fuel cell powered, propellerdriven airship controlled by an on-board autopilot with basic commandstelemetered from a ground control station. Design of the balloon,power train, gimbaled propeller assembly, and electronic/electricalsystems is presented. Flight operations for launch and recovery arediscussed. D D
JUL 14 1975
PROCE S1A72 M 0U,
DID 1NOV.1473Unclassified

Unnl1beRi f i apr3Security Classification
1.LINK A LINK 0 LINK C'1~ Kmy WOPROS - -
________________________________"0__ ROLE W T MOLE W T ROL.E WT
Airship
Balloon
Balloon film material
Powered balloon
Power sources
Remotely piloted vehicle
Superpressure balloon
security Classification

CONTENTS
P age
Section INTRO DUCTION ... .. 52 DEVELOPMENT OF HIGH ALTITUDE POWE6RE
BALLOONS . . ....... . . . 83 REVIEW OF CONCEPT DESIGNS . . . . . 123.1 Balloon Vehicle .*. . . . . . . . 123.2 Airship Propulsion and Control . 14S3.3 Power Source .. . . . . . . 143.4 Electrical and Electronic Systems 164 SYSTEM CONCEPT CHOICE ANALYSIS . . . 204.1 Computer Program . . . . . . .. 204.1.1 Flow Chart . . . . . . . . . . . 214.1.1.1 Initialized Data . . . . . . . . 214.1.1.2 Input Data . . . . . . . . . . . 234.1.1.3 Altitude, Wind Speed, and Mission
Time . .. . . . . . . . . 234.1.1.4 Balloon Parameters . . . . . . . 244.1.1.5 Power Source Parameters . . . . . 244.1.1.6 Test for Solution . . . ... 254.1.1.7 Time, Wind, and Altitude Loops . 254.1.2 Program Nomenclature . . ... 264.1.3 Parametric Equations . . .... 324.1.3.1 Altitude Control . . . . .... 324.1.3.2 Balloon Equations ....... 334.1.3.2.1 Natural Shape . . . . . . . . . . 334.1.3.2.2 Class C Shape . . .... . . . . 354.1.3.3 Power Source Equations . . . . . 374.1.3.3.1 Combustion Engine Equations . . . 374.1.3.3.2 Electric Power Source Equations . 384.1.3.3.2.1 Fuel Cell . . . . . . . . .... 394.1.3.3.2.2 Solar Array . . . . . . . . . .*.. 404.1.3.3.2.3 Battery "o r t "Data " " * 424.2 Analysis of ParametricDt . . .43
4.2.1 Discussion of Graphs . . . . . . 434.2.1.1 Discussion of Figure 4.3 . . . . 514.2.1.2 Discussion of Figure 4.4 ... 524.2.1.3 Discussion of Figure 4.5 . . . . 534.2.1.4 Discussion of Figure 4.6 . .. . 534,2.1.5 Discussion of Figure 4.7 .... 0 544.2.1.6 Discussion of Figure 4.8 . . . . 544.2.1.7 Discussion of Figure 4.9 .... 55
4.2.2 Sensitivity Analysis . . . . . . 554.3 System Concept Choice . . . . . . 575 SYSTEM DESIGN ........... 61
II1 1

CONTENTS
Section 5.1 Vehicle . . . . . . . . . . . . . 61
5.1.1 Balloon . . . . . . . . . . . . . 615.1.1.1 Hull . . o a o 615.1.1.2 Fins u. . . . . . . . . . . 665.1.2 Stern Structure . . . . . . o 705.1.3 Gondola . . ... 735.1.4 Weight Summary and Di.tribution 765.2 Propulsion Drive Train . . 765.2.1 Propulsion Motor ........ 795.2.2 Speed Reducer .......... 805o2.3 Propeller ........ 805.2.4 Thermal Analysis. . . ... . 885.3 Flight Control System o e 895.3.1 Gimbal Mechanism. . o . . . . . . 905.3.2 Autopilot and Sensors .. .. .. 985.3.2.1 Pitch Control . . . . . . .. . 1005.3.2.2 Yaw Control ..... .. . . .1005.3.3 System Stability . . . o . .. . 1015.3.3.1 Autopilot Stability . . . .. 1025.3.3.1.1 Gimbal Position Loop. . o . . . 1025.3.3.1.2 Pitch and Yaw Control Loops . . . 1045.3.3.2 Airship Flight Stability. . . . 1065.3.4 Heading Control System. . . . . . 1095.3.5 Command and Telemetry System. . 1115.4 Power Supply System . . . . . . . 1135.4.1 Fuel Cell System.. 1135.4.2 Power Distribution and Control Sys-tem o 1155.4.3 Emergency Power Supply. . 1185.5 Launch and Recovery Operations. . 1195.5.1 Launch. . . . . . . . . . . . . . 1195.5.2 Recovery ........ ... 1236 SUMMARY AND CONCLUSIONS. o o o 126
2
.....................................,' :.

MIGURES
Pae
FIGURE 3.1 Vehicle concepts analyzed . .. . . . . 133.2 Battery system block diagram . . . . . . 173.3 Combustion engine system block diagram . 18 j3.4 Fuel cell system block diagram ..... 183.5 Solar array system block diagram ... 194.1 Hypothetical system weight and buoyancy
versus balloon size . . . . . . . .. 214.2 HASKV computer program flow chart . . . . 224.3 Effects of duration on propulsion power
and system masr for all concepts.... 444.4 Effects of velocity on propulsion powerand system mass ... .. . 45 ,4o5 Effects of altitude on system design • * 464.6 Effects of material stress, coefficient
of drag, and free lift on propulsionpower . . . o . . . . . . . . 47
4.7 Effects of using more than one materialthickness on propulsion power andsystem mass . . . . 48
4.8 Effects of using attitude control onpropulsion powei and system mass 49 . 49
4.9 Effects of payload mass and powerrequirements on propulsion power . 50
5.1 PODAL-S airship . . . . . . . . . . . . . 625.2 Envelope gore configuration . . . . 635.3 Stern structure, side view .... 715.4 Stern structure, end view ..... 725.5 Gondola . . . . . . . . . . . . . . 745.6 Gondola suspension, end view • • . 755.7 Patches for gondola s ispenjion .. 775.8 Motor configuration ....... .. 815.9 Converter configuration . . . . . . . . . 82"5.10 Motor performance characteristics . . o - 835.11 Speed reducer .......... .. 845.12 Speed reducer, section view ... . 855.13 Propeller blade shape ..... . .865.14 Propeller blade perimeter and cross
section area for determination of bladesurface area and volume . . . . . . . . 87
5.15 Propeller blade construction ...... 885.16 Flight control system block diagram . . .915.17 Gimbal mechanism ............ 92
3
".........."....................................\

FIGURES
FIGURE 5.18 Gimbal position loop . . . . . . . . 945.19 Autopilot block diagram a e ....... 995.20 Heading control, yaw channel . . . .. .102
4 5.21 Gimbal position loop .. . . . . ... . .1035.22 Bode plot, gimbal position loop ... 1035.23 Pitch (botton$ and yaw (top) control loopslO55.24 Geometry and nomenclature- used for
Sairship flight stability analysis .1075.25 Two examples of airship performance for
lateral control ...... Ii05.26 Heading control block diagram . . . . . .11l5.27 Radio command system block diagram . . .1125.28 Telemetry 'system block diagram .. . 1145.29 Fuel cell characteristics ... .. . 1165.30 Power distribution and control system
block diagram ... . . . . . . . . . .1175.31 Launch sequence . . . . ....5.32 Gondola/load patch deployment sequence .122
-4

1 * INTRODUCTION
Considerable effort has been expended during the lastseveral years in the development of unmanned high altitudestation keeping vehicles. Such vehicles are airborne plat-forms capable of loitering above a specific location or geo-graphic area on the earth while maintaining a high altitude.These vehicles have applications encompassing military,civil, and scientific uses. Examples of vehicle conceptsinclude drones, RPV's (Remotely Piloted Vehicles), flyingwings, microwave'beamed power vehicles, synchronous station-ary satellites (not airborne), free floating balloons, te-thered balloons, and powered balloons. This report is in-tended to concentrate on powered balloons. A brief discus-sion of balloon concepts follows.
Many studies of tethering balloons at altitudes in ex-cess of 18,000 meters (60,000. feet) have been performed.The primary problem associated with this concept is the pro-curement of a lightweight, high strength tether cable whichwould make such a system design feasible. Present develop-ments are centered on the use of Kevlar fibers for a dielec-tric cable. The high cable tensions and system performancecharacteristics are extremely difficult to predict becauseof the great changes in the relative wind conditions imposedon such a system. Thus, the primary disadvantage of thetethered balloon concept is the required direct link betweenthe balloon and the ground.
Three types of free floating balloon systems have beenstudied. One study addressed the problem of setting up andmaintaining a network of superpressure balloons such thatfrom a statistical standpoint one of the balloons would bewithin a specified area for a certain percentage of thetime.' The actual study looked more closely at the problemof a communications network instead of a down-looking recon-naissance type balloon, but the problems are similar. Thedisadvantage of this type of system is the obviously highnumber of balloons required and initial costs which would beincurred. Once the network is developed, then an on-goingballoon replenishment program could be set up to maintainthe network. One of the main advantages of this type of sys-tem is the simplicity of the individual vehicles.
. Winker, J. A., High Altitude Relay Platform System, Re-port No. 0669011, Raven Industries, Inc. Final Report, Con-tract 4691, Task Order 18. 15 May 1969.
I iI I I

The second type of free floating balloon concept utili- Izes a balloon floating in the stratosphere between 15 kilome-ter (50,000 feet) and 21 kilometer (70,000 feet) where east-erly winds would prevail during much of the year. 2 To attaina loitering capability a reefable parachute would be loweredto a level where westerly winds would exist. In this way the "parachute would act as a variable drag device such that aforce balance between the balloon and the parachute would beattained so that no horizontal motion would exist. This typeof system is entirely dependent upon proper wind conditionsexisting. This drastically reduces the operational capabil-ities of the system because of the dependence of the system 'A
upon the specific wind conditions. Thus such a system can Ionly be used for a few months of each year.
The third type of station keeping free floating balloonis a concept which has actually been demonstrated and used. 3' 4 ' 5
This involves ballasting and valving to attain a reasonabledegree of altitude changing and altitude control so that wind .idirections and speeds could be altered. This type of stationkeeping concept has been rather limited in duration becausethe mission generally needs to be terminated shortly afterall the ballast is used up. Other limitations of this con-cept include its dependence upon proper wind conditions ex-isting and of being able to find these advantageous windfields.
SfBourke, Edgan R. II, "Addenum To Presentation On a U-nique Approach to Balloon Station Keeping", Raytheon Company.Presented at Earth Observations From Balloons Symposium, Amer-ican Society of Photogrammetry. Published by Raytheon Com-pany. 7 February 1969.
3Nolan, George F,, High Altitude Minimum Wind Fields andand Balloon Applications, AFCRL 64-843, Air Force CambridgeResearch Laboratories, 1964.
4No~an, George F., A Study of Mesoscale Features of Sum-
mertime Minimum Wind Fiels in the Lower Stratosphere, AFCRL67-0601, Air Force Cambridge Research Laboratories, 1967.
51olan, George F., "Meteorological Considerations forTethered and Hovering Free Balloons", Air Force Cambridge Re-search Laboratories. Symposium Proceedings, Earth Observa-tions From Balloons, American Society of Photogrammetry..February 1969.
64
.iI. -. N.04.I1.1',rp - . . . . .

The work performed under this contract was to result ina design of a superpressure airship capable of an airspeed of8.18 meter/second (15.9 knot) at an altitude of approximately21 kilometer (70,000 feet) for a 7 day duration with a pay-load weighing 890 newton (200 pounds) requiring 500 watts ofpower continuously.* A major task under this POBAL-S programfocused on the specific system design. The completeness ofthe design was limited by the availability of funds.
Prior to entering into a specific design of a selectedsystem type, a parametric investigation of various systemconcepts was p'ýrformed.6 The various power sources whichwere investigated included internal combustion engines, fuelcells, batteries, and solar cells.
The system concept which was chosen utilized a fuel cellas the power source. The parametric analysis revealed thatthe fuel cell powered system would be cost effective and re-liable as a demonstration vehicle capable of meeting theperformance specifications.
*Originally the speed requirement was 10.3 m/s (20 kn)and no power was to be allocated to the payload. During thecourse of the contract the speed requirement was reduced to8.18 m/s (15.9 kn) and the payload power requirement was de-fined as 500 W continuous power. The effort reported on inSection 4.0 uses the original speed and payload power re-quirements. The design discussed in Section 5.0 uses thenewer requirements.
6Beemer, Jack D., et al., POBAL-S, R & D Design Evalua-tion Report, Part I, System Concept Choice, Report No.0273001, Raven Industries, Inc. Air Force Cambridge ResearchLaboratories Contract No. F19628-73-C-0076. 23 February 1973.
7
................

2. DEVELOPMENT OF HIGH ALTITUDE POWER BALLOONS
The first serious study of the high altitude stationkeeping powered balloon concept was performed by General Mills,Inc. during the late 1950's. 7 This study described a poweredairship which was to carry a payload of 440 to 1320 N (100 to300 lb) to an altitude of 18 to 24.5 km (60,000 to 80,000 ft)for a duration of 1 to 8 hours. The Mechanical Division ofGeneral Mills, subsequently absorbed by Litton Industries,carried out a considerable amount of additional analysis af-ter its Lighter-Than-Air Concepts Study was published. In1967 Litton discontinued ballooning activities.
Since the first efforts performed by General Mills there waslittle actual work done until after 1965. At this time Good-year Aerospace Corporation began work in this subject areawhich resulted in a report entitled An Investigation ofPowered, Lighter-Than-Air Vehicles. 8 This work was performedunder the sponsorship of the Air Force Cambridge ResearchLaboratories. Two basic concepts were studied in this re-port. The first was an aerodynamically shaped airship whichcould be flown to and from the 21 km (70,000 ft) design al-titude, and the second was a natural shape balloon whichonly operated at the design altitude. For the second con-cept at termination of the mission the payload and powerplant were to be parachuted back to earth.
The first hardware constructed and used in the manner ofa high altitude station keeping vehicle was fabricated byGoodyear Aerospace Corporation. 9 The propulsion system con-sisted basically of a propeller at onj end of a gondola anda rudder at the other. The gondola orientation, or heading,and the rudder position were telemetered to the ground alongwith other monitored flight information. The rudder positionwas changed by radio command to make the gondola point in theproper direction. This system was not demonstrated to be
'Anderson, A. A., et al., Lighter-Than-Air Concepts Study,Report No. 1765, General Mills, Inc. Final Report, Contract1589 (07). 1 September 1957. Revised, March 1960.
OVorachek, Jerome J., Investigation of Powered Lighter-Than-Air Vehicles, GER 14076, Goodyear Aerospace Corporation.AFCRL-68-0626, F nal Report, Air Force Cambridge ResearchLaboratories, Contract No. F19628-67-C-0047. 27 November1968.
9High Altitude Powered Balloon Test Program, Report No.
BB-2304, Goodyear Aerospace Corporation. November 1968.
8

"I ----- ~ -I'"controllable. It was likely that it was not controllablebecause of aerodynamic considerations and because an auto-pilot was not incorporated into the system.
The next effort pertinent to high altitude station keep-ing vehicles was performed by Raven Industries during 1969and 1970.10 This was the High Platform II prog--m underwhich the first high altitude, solar powered, i,.opiloted air-ship was successfully demonstrated. The main pt .pose of thisprogram was to actually demonstrate, at a moderate cost, thata practical high altitude (21 km or 70,000 ft altitude), longduration, station keeping vehicle could be built.
The High Platform II vehicle itself was only a sun seek-ing vehicle and had a cadmium sulfide solar cell array placedon the balloon envelope such that when the vehicle was orien-ted toward the sun enough power would be supplied to propelthe balloon at a design speed of 10.3m/s (20 kn). Also, thevehicle could only be used for daytime operation since bat-teries, which would have been necessary for nighttime opera-tion, were not a part of this system. This superpressureballoon was configured with a propeller suspended underneathit on a gondola and was controlled with both moving and sta-tionary horizontal and vertical statilizing surfaces. HighPlatform II was flown in May of 1970.
The next activity which was initiated was the High Plat-fcrm III Design Study performed by Raven Industries7. Thiswas a paper study contract which resulted in a final reportdescribing a preliminary design for a system having a fourmonth operating duration at an altitude of 25.5 km (85,000 ft)with a capability of maintaining a continuous 7.7 m/s (15 kn)air speed. This paper study also generated a limited amountof parametric trade-off analysis information.' Of particularimportance, this analysis revealed that there was no advan-tage to utilizing altitude control to minimize the stresslevels in the envelope by driving the vehicle up or down witha positive or negative angle of attack respectively.
SUBeemer, Jack D., et al., High Platform II, Report No.R-0870025, Raven IndusLries, Inc., Final report, Contract4691, Task Order 22. 14 August 1970.
'Beemer, J.D., et al., High Platform III Design Study,Report No. 0871005, Raven Industries, Inc., Final Report,Contract 5831. 31 August 1971.
9

The airship designed under the High Platform III DesignStud had a volume of 17,000 ml (600,000 fto). The envelope""-ength was 94 m (309 ft) and had a fineness ratio of 5.0.It was to be powered with cadmium sulfide solar panels whichfurnished the necessary electrical power to an electric mo-tor driving a gimbaled propeller which was mounted on thetail of the airship. The horizontal and vertical stabilizingsurfaces were to be pressurized with air and the envelope it-self was fabricated from a biaxially oriented nylon film.One of the unproven assumptions used in the design of HighPlatform III was that a pulse charging technique could beused to increase the number of charging cycles available fromthe battery. Another assumption was that the nylon filmwould in fact be developed into a successful superpressureballoon material. The High Platform III Design Study wascompleted in August 1971.
Shortly after the High Platform III Design Study wascompleted, the Air Force Cambridge Research Laboratories is-sued an RFP for a free balloon propulsion system. The basicgoal of the system was to keep an 880 N (200 lb) payload onstation at a nominal altitude of 18 km (60,000 ft) for a 24hour duration. The method of accomplishing this was to util-ize altitude control on the balloon such that it could bepropelled through a minimum wind field. Goodyear AerospaceCorporation was awarded the contract under this effort. .
In September, 1972, the Goodyear free balloon propulsion sys-tem was flown from Holloman Air Force Base. The system con-sisted of a natural shape balloon from which a battery power-ed, electric motor driven propeller was suspended. This sys-tem was to have a 24 hour duration, 12 hours of which was tobe under powered flight. The nominal thrust required by thepropeller was 445 N (100 lb). Due to mechanical failure,the flight of this system was terminated with less than 6hours of powered flight. During this time it was demonstra-ted that although the concept was feasible, problems of in-stability were present.
Because of the sensitivity of station keeping vehiclesize, mass, and power requirements for various mission param-eters, it was felt necessary to have a general overview ofthe concept of superpressure high altitude station keeping
2Vorachek, Jerome J., Edward W. McGraw, John W. Bezbatchen-ko, Development of a Free Balloon Propulsion System, Good-year Aerospace Corporation. AFCRL TR-73-0128, Final Report,Air Force Cambridge Research Laboratories, Contract No.F19628-72-C-0072. April 1973.
10
................................I~ .I

airships. Thus, the Study of High Altitude Station KeepingVehicles was performed by Raven Industries.4' This resultedin a final report in March, 1973. It was under this studycontract that the HASKV computer program was written to para-metrically analyze various system concepts. Also, a vehiclecapable of operating at 21 km (70,000 ft) for a few monthsduration with an average speed of 10.3 m/s (20 kn) carryinga 880 N (200 ib) payload was designed, and the results werepresented in the final report.
Under the Study of High Altitude Station Keeping Vehi-cles Raven Industries utilized its own in-house expertise in
=e--tonic systems, superpressure balloon technology, and me-chanical hardware design. However, an extensive literaturesearch and subsequent vendor contact effort was spent togain knowledge of the primary power sources and electric mo-tor. More than seventy companies and organizations active inthermal electric generators, solar cells, fuel cells, batter-ies, turbine engines, reciprocating engines, and rotary pis-ton engines were solicited for information pertinent to thestudy. With the information thus gained, it was possible toenter into a parametric analysis in which all vehicle com-ponents could be parametrically defined. The parametric workperformed showed very clearly the great advantages of usinga superpressure balloon material stronger than polyester filmand the necessity of using solar power for such extended mis-sion durations.
It was during this latter study contract that the POBAL-Sproject was begun. The remainder of this report summarizesthe work performed under the POBAL-S program and presents thedesign of the POBAL-S airship.
"i iBeemr, Jack D., et al., Study of High Altitude StationKeeping Vehicles, Report No. 0373003, Raven Industries, Inc.,Advanced Research Projects Agency Order No. 1983 Final Re-port. 15 March 1973.
11

3. REVIEW OF CONCEPT DESIGNS
This section of the report discusses the various aspectsof the balloon system design. The intent is to provide asimplified description of the system components. This willbe beneficial in understanding the vehicle design and willaid in understanding the computer program. The readers at-tention is called to Section 5. of this report for a moredetailed description of the fuel cell powered airship. Thetypes of vehicle concepts which were studied are shown inFigure 3.1.
3.1 Balloon VehicleFor thie aerodynamic shaped balloon systems, only balloon
designs utilizing conventional high altitude superpressurespherical balloon technology were considered in the paramet-ric analysis. This type of balloon has normally been con-structed from polyester film laminates. The purpose of lam-ination is to prevent helium leakage due to pin holing, whilethe polyester film itself has very low permeability to heliumand very high strength characteristics. The use of such ma-terials allows the balloon envelope to be presaurized to alevel such that at nighttime, when the radiation conditionsmay result in the balloon temperature being less than ambienttemperature, the balloon will still be superpressured. Ifthe pressure in the balloon goes below ambient pressure, theballoon will go slack and descend in altitude. Typicallythe duration of superpressure balloons is measured in termsof months, and several balloons have flown well in excess of400 days. These long durations can be accomplished becauseit is not required that ballast be used to retain altitudethroughout the nighttime.
Variations in material types, density, and acceptablestress levels have been considered in the parametric analy-sis. Ideas which have been considered include the use ofhigh strength fibers laminated between layers of the balloonfilm to increase the film strength-to-weight ratio and ap-plying to the film a thermochromic coating which exhibitstransitional optical absorption and reflectance characteris-tics which could possibly help control the supertemperature.These approaches are not believed to be feasible for usewith this type of balloon. Technological improvements insuperpressure balloon materials will likely be accomplishedin the near future, but the higher stressing limits whichhave been studied parametrically should encompass such im-provement1s,
12

INFLATED FIN CONESFIN MEMBRANE
BATTERIES
BATTER POWERED AIRSHIP
HELIUM RELIEF VALVE
GAS TURBINE OR INTERNAL COMBUSTION
ENrIN9 POWERED AIRSHIP
FUEL CELLFUEL TANKSH20 BLADDER
"FUEL CELL POWERED AIRSHIP
SOLAR CELL ARRAY
SOLAR AWAY POWdERED AIRSHIP
IBALLONET
FUEL CELL
FUEL CELL POWERED AIRSHIP,WITH ALTITUDE CONTROL
Figure 3.1 Vehicle concep~ts analyzeri.
13

The balloon vehicle itself is defined to include theenvelope, the fins or stabilizing surfaces and any attachmenthardware. The basic shape is assumed to be that of a NlavyClass C airship with a fineness ratio of 5.0. Other fine-ness ratios have been investigated and it has been determinedthat near-optimum system design will occur within the rangeof fineness ratios of 5.0 to 7.0.11,119
The stabilizing surfaces are assumed to be constructedfrom air pressurized conical shaped beams (two for each sur-face) with an impermeable membrane stretched between. (Re-fer to Figure 5.1 for a detailed sketch of the system.) Thebeams would be pressurized by use of a very small, low powerconsumption air compressor. In this way the integrity ofthe primary envelope is retained and minimal departure fromconventional superpressure balloon technology is accom-plished.
3.2 Airship Propulsion and Control
The propulsion and gimbal assembly includes the motoror engine for propulsion and the mechanical hardware requiredto pitch and yaw the propeller. (Refer to Figures 5.3, 5.4,5.17.) The actual thrust is derived by use of a propeller.The gimbaling mechanism itself is designed using roll nuts andscrews powered by small electric motors to provide two-degreefreedom of movement for the propeller. The control of theairship is thus accomplished by changing the propeller posi-tion by electronic signals provided by an autopilot so thatthe vehicle will remain within acceptable limits in pitch andyaw. A very important component of the system is the speedreducer which allows the propeller to operate at much slowerangular velocity than does the motor or engine powering it.Experience has shown that belt drive systems are highly ef-ficient and acceptable lor the use as contemplated here.
3.3 Power Source
The primary variation between system concepts was in thepower source used to drive the propeller. In the parametricstudy the solar cell array, fuel cell, gas turbine, internalcombustion engine, batteries, and advantageous wind fieldswere analyzed. Two of these sources, the solar cell array
"Rueter, Loren L., "Drag Analysis for POBAL-S & HASKVHigh Altitude Airships", informal paper, Raven Industries,Inc., 10 October 1972.
14
............ .........................

and the advantageous wind fields, utilize ambient energysources. All other types analyzed either burned fuel or gen-erated their own emf (electromotive force). The solar cellarray, fuel cell, and gas turbine powered concepts receivedthe most attention in the analysis. Wankel and Diesel en-gines were the only two internal combustion engines studied,and parametrically they are quite similar to the gas turbinein concept.
The concept of using only primary batteries for powerhas been analyzedj and, as anticipated, because of systemsize it does not appear feasible except for very short dura-tion missions. The advantages of such a concept lie in thesimplicity of the design since all that is required is thebatteries, mounted somewhere in front of the system centerof gravity, with power cables running back to an electricmotor.
The gas turbine and internal combustion engine conceptsare very similar. These power sources would actually bemounted on the gimbal arrangement and gimbaled as with theelectric motor for the electrical type systems. The fuelwould be located near the front of the airship so that hori-zontal stability could be attained. Under this scheme itwould not be possible to save the consumed fuel and conse-quently a ballonet or pumping and valving scheme must be in-tegrated into the system. The advantage of this type ofsystem as compared to the fuel cell system is that the fuelcan be stored in conventional type tanks. Considerations infinal system design would have to be given to pumping thefuel from the storage area to the combustion chambers.
The fuel cell powered concept is similar to the solar power-ed concept in that it provides electrical power to a gim-baled motor/propeller arrangement. The water generated bythe fuel cell would be stored and not disposed of. The ad-vantages of storing the water is that the system mass re-mains constant during operation. Thus, the floating alti-tude and static trim angle of the airship will not changeduring the flight. Also, this allows the fuel to be locatedat that position along the balloon which is required to at-tain horizontal equilibrium when the system is shut down.The fuel cell concept also requires that the additional heatgenerated by the fuel cell be radiated. It may be possibleto iarke use of this waste heat in controlling negative super-temperatures, but if one were to shut the system down atnight then this heiat would not be present. Thus, the system
15
". . .. .. . . . . . . ....... .,. . '

would have to be designed as if this capability were non,-existent.
For the solar powered concept, the panels of cells,which are integrated to make the array, are placed on thesurface of the balloon envelope and are located so that arle-quate power is delivered to the system for any conceivablesun angle. All individual panels would have to be diode-iso-"lated so that those which are greater than 1.57 radians (90degrees) from the sun would not act as loads on the rest ofthe panels. Major attention needs to be paid to the current/voltage characteristics of the cells at various angles to thesun. These characteristics are temperature dependent, andunder the configuration used here each panel would be opera--ting at a different temperature because of radiation effects.The panels are connected either in series or parallel and are.electrically integrated. Thus, they form an electrical ener-gy source which will provide the required system power tooperate the motor during the daylight hours and, at the sametime, charge the batteries which are used for nighttime oper- .,
I:,!,,,,i.,ation .
The use of advantageous wind fields was analyzed only inthe sense that trade-offs between utilizing altitude controland not using altitude control were compared. Without thecapability of changing altitude, the use of advantageous wind '0fields would not be feasible for this system. The most sig-nificant problem with this concept is determininq where thewinds are most favorable. To date, no acceptable wind sen-sing mechanisms are known to exist which could be applied tothis type of system.
3.4 Electrical & Electronic Systems
Early in this study four different electrical systemswere analyzed. The electronic requirements were virtuallythe same for all concepts. The term "electronics" as usedherein includes navigation, command and control, stabilitycontrol (autopilot), and telemetry.
The navigation unit provides the autopilot with the re-quired error signals based on deviations from the desiredstation. The command and control assembly provides variousswitching and housekeeping functions when given commandsfrom either on-.board or radio command systems. The autopilotcontrols the direction of the airship to maintain stableflight. The telemetry system provides the down--link to thecommand station and provides system and flight evaluation
16
..........

and control data. Each of these systems will be discussedin further detail in Section 5.4.
A stand-by power source is provided and intended foruse only if the main power source should experience a fail-ure. The back-up battery powers vital control functions for24 hours in case of a primary system failure. This wouldpermit attempted restarts and trouble shooting with the op-tion of terminating the flight at a time which best facili-tates recovery.
All electrical systems use electric gimbal motors fordirecting the thrust vector of a propeller. The autopilotmust have sufficient power, proper voltage, and correct dy-namic characteristics to operate these motors.
The electrical systems were fit into four categorieslpure battery, fuel cell, solar cell array, and combustionengine. All systems concepts except the combustion enginesystems use an electric propulsion motor having conductorsrunning from a control package, near the center of the bal-loon, to the motor at the stern. These wires carry theheaviest current in the system over the longest distance andmust have very low impedance.
The simplest system, electrically, is a primary (non-rechargeable) battery for the basic power source. The com-puter inputs for this system were based on using lithium-organic batteries for the main power source and regulatingonly the electronics supply voltage. Figure 3.2 is a simpli-fied block diagram for a primary battery system.
CONTROL SYSTEM
TU•TUST
Figure 3.2 Battery system block diagram.
17
•. ;.
.. ....a i .. .. . .. . . . . . . .I I I

The power distribution for the combustion engine systemis actually two systams, both supplied by the same alterna-tor. An electrical system similar to that in an aircra±t isused for ignition and starting. A second power system isused for electrical and electronic control systems. The massof the secondary battery for this system is based on silver-zinc battery characteristics. Figure 3.3 is a simplifiedblock diagram showing the increased complexity.
---------------------........ b-------------.
S~ ~~CONTROL. SYSTEM-•TRU
RT R I N" i- RU ST
Figure 3.3 Combustion engine systems block diagram.
As explained in Section 4.3, the fuel cell system con-cept was chosen for this study effort. A simplified blockdiagram of the fuel cell electrical system is shown in Figure3.4. The power losses in the control package of a fuel cellsystem are low since the propulsion power is adequately reg-ulated by the fuel cell. The optimum voltage for this systemwas determined to be 30 volts.
. .~~~L ... . . . . . . . .....
O.,O LRO LTE
F [..NiVR VOTG VOLTAGE •,•...n
IDATTERY~• VECTORORSE!O
Figure 3.3 Comustio engin system s block diagram .
Asexlane i Scio 43,th fe cllsyte1cn

The'solar cell array system is the most complicatedsystem considered;' however, it also has a greater endurancethan the other systems. The primary mass contribution comesfrom the rechargeable battery which was assumed to be madeup of silver-zinc cells. One fact learned during this studywas that when short days are encountered sizing of the stor-age battery is determined from limits of charging currentrates based upon energy storage efficiency. Silicon solarcell data were used to compute solar array mass. Due to theamount of power conditioning required in a solar cell arraysystem, efficiency of the power distribution system is low-er than the other concepts. A considerable number of elec-trical connections and wires are required in a solar poweredsystem, making it more difficult to fabricate and launch.Figure 3.5 is a simplified block diagram of a solar cell sys-tem. The increased complexity over previous systems appearswithin the control system.
CONTROL SYSTEM r..
" ROPULSION THRUST
I NI
AUTOIO GEN
S CONTROL
Figure 3.5 Solar array system block diagram.
Ii.
19
JaEPU

4. SYSTEM CONCEPT CHOICE ANALYSIS
A significant portion of the effort under this contractwas expended in studying system types and choosing one typefor a complete design. This analysis was performed prior tothe finalization of system performance requirements and isintended to be a tool for comparison purposes only. Thissection Oescribes the methods of analysis and presents theresults.
4.1 Computer Program
A detailed computer program, HASKV, was used to generateparametric information describing the system designs. Acopy of the program and program output examples are includedin Appendix A. The IIASKV program was developed as an analy-tical aid in evaluating high altitude station keeping vehi-cles. 1 3 It is a versatile yet detailed program. The programcan perform calculations involving the vollowing items:
1. Fifty-seven input parameters (constants for para-metric equations).
2. Class C aerodynamic shape and natural shape balloons
3. Six different power sources:
a. Gas turbineb. Wankel enginec. Diesel engined. Fuel celle. Solar cell arrayf. Battery
4. Altitudes from 16.5 km (54,000 ft) to 30.0 km(98,200 ft) in 1.5 km (5,000 ft) increments
5. Altitude control - 1.5 km (5,000 ft) or 3.0 km(10,000 ft) excusion
6. Wind speeds from 2.574 m/s (5 kn) to 15.44 m/s(30 kn) in 2.574 m/s (5 kn) increments
7. Mission time variation
8. Balloon diameter3 up to 200 m (660 ft)
Basically the program determines a system size which is
20

capable of lifting the required mass. Required mass is afunction of input conditions such as altitude, type of powersource, wind speed, etc. It includes hull mass, payloadmass, and all component masses required to power the system.For a given set of conditions, a plot of lifting capabilityversus system size, and a plot of required mass versus sys-tem size could be generated. These plots for a hypotheticalset of conditions are shown below as a function of balloonradius:
BUOYANCY
SYSTEM WEIGHT
BALLOON RADIUS
Figure 4.1 Hypothetical system weight and buoyancyversus balloon size.
A unique solution (R') is obtained if the two curves in-tersect. HASKV performs an iteration on balloon radius untilthe lifting mass equals the required mass. Outout data gener-ated by the program is then printed.
4.1.1. Flow Chart
A simplified flow chart of the HASKV computer programis shown in Figure 4.2. Literal phrases are substituted formathematical expressions as an aid in discussing the Proqramlogic. Actual parametric equations are discussed separately.
4.1.1.1 Initialized Data. Variables that are a function ofaltitude are stored in the main program as arrays. Eachelement of the array corresponds to a fixed altitude and canbe referenced by the main program. This decreases the amountof input required. Air density, helium lift, and pressureratio are stored for all altitudes. In addition, standard
21
,- . . . . . .. . . . . . . . . . . . .... .. ... . . . .~

Eaomute paamtuer.Cmueprmtr
00
b -g f- clans Coo shapexiu
[lnoren Nollitdecont
11 pe A tio 1
Compute 4.2 mte HAK o I~ ter rga lwcat
for iter2a

sea level pressure and air density are sto-ed. f4.1.1.2 Input Data. Necessary inputs include a heading,57 input parameters and control cards. The heading may con-sist of a short phrase indicating the purpose of a run. Ifno more data are to be read, the program terminates.
The input parameters are used in the parametric equa-tions as constants and are supplied as input variables sothat effects of different choices can be analyzed. An exam-ple would be skin density per unit thickness. Since the skindensity is an input variable, a system using a polyester en-velope can be compared directly with one using a nylon en-velope. All other parameters remain the same and the para-metric equations are still valid. The large number of param-eters which can be varied makes the program a powerful ana-lytical tool.
Control cards supply information to the program regard-ing type of power source, altitude, wind speed, length ofmission, and whether altitude control is or is not to beused. In the case of altitude, wind speed, and mission time,the card supplies initial value, maximum value, and the in-crement between each printing of output data. These controlvalues are applied to the loop counters of the altitude loop,wind loop, and the time loop. Computer time is saved byanalyzing specific ranges of interest without generatingneedless amounts of data.
Control cards may be stacked. After all loop countershave reached their maximum value specified by the presentcontrol card, a new control card is read. This enables dif-ferent power sources, or altitude control versus no altitudecontrol, to be run with the same input parameters. Each timea control card is read the heading, all input parameters withvalues, and the type of power source used are printed.. Ifno more control cards are to be read, a new heading is read,new input parameters are read, and new control cards areread. When the input is exhausted, i.e., no new headingcard, the program is terminated.
4.1.1.3 Altitude, Wind Speed, and Mission Time. Thesethree variables are computed as a function of their respec-tive loop counters. The general form is:
"Variable = constant + second constant x counter.
"I"
23 -'

All counters are whole numbers. Thus, altitude is computedas., •
15,000 m + 1,500 m x altitude counter. -•
Initial value, maximum value, and the increment for eachloop counter is specified by the control card. Each time theloop is executed, the loop counter is increased by the incre-ment specified. The time loop is executed first, then thewind loop, and last, the altitude loop. Thus, each altitudeincrement lists data for each increment of wind and each windincrement list data for all time increments. Whenever thesethree values are calculated, they are printed.4.1.1.4 Balloon Parameters. The program determines which
balloon type is to be used by checking the fineness ratio.This ratio is included in the input parameter list. If thefineness ratio is greater than one, parameters for a Class Cshape are calculated. Natural shape parameters can be cal-culated if the fineness ratio is less than or equal to one.No natural shape calculations were made for POBAL-S.
Such physical parameters as volume, surface area, skinthickness, and hull mass are computed by parametric equa-.tions. Data from the input parameter list and the currentvalues of loop variables are utilized. This marks the be-ginning of the size loop or iteration loop. Consequently,-the majority of the equations in this group are a functionof balloon radius. At this point, net lift and power re-quired for the balloon size being considered are computed.
4.1.1.5 Power Source Parameters. A decision must be madeby the program as to which parametric equations are to beused. This is done by checking the value of K. It is thefirst parameter specified by the control card. K values andthe corresponding power sources are:
Internal Combustion Systems:1 Gas turbine2 Wankel13 Diesel
Electric Systems: j4 Fuel Cell5 Solar cell array6 Battery
24

All internal combustion engines use the s.me parametricequations. The variations are accounted for in the inputparameter list. If K is less than or equal to 3, the inter-nal combustion equations are used. For K greater than 3,the component masses common to the electrical systems arecomputed. These include the speed reducer and motor. Asecond check is then made on K. If K is less than 5, fuelcell parametric equations are used. If K is equal to 5,solar array parametric equations are used. For K greaterthan 5, parametric equations for a pure battery system areused.
The parametric equations of this group compute com-ponent masses for the power system. Included are equationsfor motor mass, fuel mass, battery mass, etc. These equa-tions are functions of the power required computed earlierin the program.
4.1.1.6 Test for Solution. Required mass can now be com-puted by summing all the component masses for the powersource, and payload. A difference is obtained by subtract-ing required mass from net lifting mass. If the absolutevalue of the difference is less than one kilogram, the pres-ent values are taken as solution values and printed. Ifthis difference is greater than one kilogram, a check ismade on the radius. If the radius is less than 100 m, a newradius is computed. The program loops back and computes newballoon and power parameters. Iteration continues withinthe size loop until a solution is found. If the solutionhas a radius equal to or greater than 100 m, "maximum sizeconsidered" is printed.
4.1.1.7 Time, Wind, and Altitude Loops. After output isprinted, %hether maximum size or solution data, the timeloop counter is checked. If it is less than the maximumvalue specified by the control card, the counter is incre-mented as specified. The program loops back, calculates anew mission time, and begins a new iteration. After the timeloop counter reaches the maximum value specified, a similarcheck is made on the wind loop counter. It is incrementedand loops until it reaches the specified maximum value. Theprocess is then repeated for the altitude loop counter. Af-ter all loops have been completed, the program loops backand reads new input. With each new input, the loops areexecuted in turn until they have been completed. Programtermination occurs when all input data are exhausted.
25

4.1.2 Program Nomenclature
The following is a list of variable names used in thecomputer program. They are listed according to function inalphabetical order. Brief descriptions are included and ap-propriate units are indicated.Initialized Data:
HLIFT Helium Lifting Mass Versus Altitude Array; kg/m3
PRESR Pressure Ratio Versus Altitude Array
RHO Air Density Versus Altitude Array; kq/m 3
SPRES Standard Pressure at Sea Level; N/M2
SRHO Standard Air Density at Sea Level; kg/m 3
Loop Counters: 2
IA Altitude Iteration
IAC Increment of Altitude Control
IT Time Iteration
K Integer for Power Source
KWD Wind Speed Iteration
Input Loop Variables: (Integers)Altitude Iteration - Alt = 16,500 to 30,000 by 1,500, IA -
1 to 10; neters
IIA Initial Altitude
MIA Max Altitude
NIA Number of Altitude Increments Each Loop
Wind Iteration - V",'7ind = 5 K.IN to 30 KN, KID = 1 to 6
IWD Initial Wind Speed
26
...................................... ,.

MWD Max Wind Speed
NWD Number of Wind Increments Each Loop
Day or Hour Loop - Days - 1 to 10, IT = 1 to 10, HRN - 1 to24p IT 1 to 24
IIT Initial Time
MIT Max Time
NIT Number of Time Increments Each Loop
Input Parameters:
ADDMI Additional Mass - Control Package, Diffuser, etc.Gas Turbine; kg
ADDM2 Additional Mass - Control Package, Regulator, etc.,Fuel Cell; kg I
ADDM3 Additional Mass - Control Package, Regulator, etc.,Solar Arrayl kg
ADHE Bilaminate Adhesive Mass/Unit areal kg/M2
AUTOM Autopilot Mass; kg
BASTM Ballast Mass for Natural Shape Balloon
BAT1 Battery Mass/Unit Energy (Out), Primary Battery;kg/kW-hr
BAT2 Secondary Battery Cell Mass/Cell Voltage - Correctedfor Packagingi kg/V
BATCC Secondary Battery Capacity - Corrected for Cycle Life;kA
BATCY Secondary Battery Capacity - Corrected for Cycle Life;kA-hr
BCHEF Battery Charging Efficiency
BENGY Back Up Energy (kW-hr)
27
.........................................,.*. ,..

CD Drag Coefficient
CELL1 First Order Constant for Fuel Cell Mass; kg/VCELL2 Second Order Constant for Fuel Cell Massa kg/V 2
CFCM Constant Fuel Cell Mass; kg
CMMI Constant Engine Mass - Gas Turbine; kg
CMM2 Constant Motor Mass - Electric Motor; kg
CSTRM Constant Structure Massa kg
DUTY Ratio of Fuel Cell Operation Time to Mission TimeECPB Efficiency of Control Package - Battery
ECPPS Efficiency of Control Package - Power Source
ECPSS Efficiency of Control Package - Subsystem
ESPR Speed Reducer Efficiency
EM Motor Efficiency
EPROP Propeller Efficiency
F Free Lift/System Weight
FIN Fineness Ratio
FINMR Fin Mass Ratio of Envelope Mass
GEOF Geometry Factor for Solar Array
GLC Gore Length Constant
PAYM Payload Mass; kg
PNBYPD Ratio of Power Required at Night to That of Day
PROP Propeller Mass/Unit Radius Lengthl kg/mr
RAD Radiator Mass/Unit Power (Out) - Fuel Cell; kg/kW
SA Solar Array Mass/Unit Power (Out); kg/kW
28

4
SFCI Specific Fuel Consumption - Gas Turbiney kg/kW-hr
SFC2 Specific Fuel Consumption - Fuel Cell; kg/kW-hr
SKIND Mass Density of Envelope Material; kg/m 2 /mm of Thick-ness
SKINR Ratio of Average Skin Thickness to Maximum Skin Thick-ness for an Envelope Constructed of Multiple Thick-nesses
SMAT Stress Allowable for Envelope Material; N/m2
SPR Speed Reducer Mass/Unit Power (Out)i kg/kW
STRMR Structure Mass Ratio; kg
SUBPOW Independent Subsystem Power Required; kW
SUPERT Supertemperature/Absolute Temperature
TERMM Mass of Termination, Telemetry, and Navigation Pack-ages
TMRl Tank Mass Ratio - Gas Turbine; kg
TMR2 Tank Mass Ratio - Fuel Cell; kg
TURBOR Turbocharger Compression Ratio
UFLM Fuel Line Mass/Unit Length - Gas Turbine; kg/mr
UMM1 Engine Mass/Unit Power Out - Gas Turbine; kg/kW
UMM2 Motor Mass/Unit Power Out - Electric Motor; kg/kW
VOLTFC System Voltage - Fuel Cell
VOLTSA System Voltage - Solar Array
WIRE1 Wire Mass/Unit Length - Turbine to Battery; kg/mr
WIRE2 Wire Mass/Unit Length - Turbine, Autopilot to Gimbals;kg/m
WIRE3 Wire Mass/Unit Length - Kiloamp, Control Package toMotor; kg/kW/kA
29

WIRE4 Wire Mass/Unit Power - Interconnecting Wire - SolarArray; kg/kW
WIRE5 Wire Mass/Unit Length - Solar Array to Control Pack-age; kg/mr
Computed Variables:
ALENG Length of Balloon; m,
ALIFT Available Lifting Mass; kg
ALPHA Helium Volume/Balloon Volume
ALT Altitude; m
BALNM Mass of Ballonet; kg
BALNR Ballonet Surface Area/Balloon Surface Area
BBATM Back Up Battery Mass; kg
BATM Secondary Battery Mass; kg
CELLM Cell Mass - Fuel Cell; kg
DAYS Number of Operating Days
DELTAP Differential Pressure; N/m2
DIFF Difference Between Available Lifting Mass and Re-quired Mass; kg
DRAG Aerodynamic Drag; N
ENVM Envelope Mass; kg
FINM Fin Mass; kg
FUELM Fuel Mass - Gas Turbine and Fuel Cell; kg
GL Gore Length; m
HRHO Air Density at Altitudel kg/ms
HRN Hours of Night; Hours
30

HRS Hours of Sunlight; hours
NG NumbeL' of Gores
PIK Power into Motor; kW
POP Power Out of Propeller; kW
PREQ Power Required; kW
PRESS Pressure at Altitude; N/m2
PROPM Propeller Mass; kg
Q Dynamic Pressure; N/M 2
RADM Radiator Mass - Fuel Cell; kg
RENV Radius of Envelope; m
REQM Required Mass a Sum of Component Masses; kg
RP Radius of Prop; m
S Surface Area of Envelope; m2
SPRM Speed Reducer Mass; kg
STRM Structure Mass; kg
SYSM System Mass; kg
TANKM Tank Mass - Gas Turbine and Fuel Cell; kg
TAPEM Tape Mass for Sealing Gores; kg
TBATM Total Battery Mass; kg
TFCM Total Fuel Cell Mass - Tank + Radiator + Cell; kg
THRUST Propeller Thrust - Drag; N
TMM Total Motor Mass; kg
TS Time on Station;- Hours
TSAM Total Solar Array Mass - Array Mass + InterconnectingWire Mass; kg
31

TSKIN Thickness of Envelope; mm
TWIRM Total Wire Mass; kg
VOL Balloon Volumey mS.
VWIND Wind Velocity; m/s
4.1.3 Parametric Equations
The computer variables are also referenced and definedin the discussion of equations. To the left of each equationor discussion, a statement number is listed. This number cor-responds to the left most number on the compiler listing inAppendix A. The equations are presented in their order ofcomputation.
4.1.3.1 Altitude Control. (23-35)* A check is made foraltitude control and the amount of control specified. Whenaltitude control is specified, skin thickness and power re-quired are computed at the lowest altitude (maximum differ-ential pressure and maximum air density). The solution forfloating equilibrium is determined at the maximum altitude(Minimum helium lift).
Variables for pressure, air density, and expansion ra-tio are determined for the altitude range being considered.For a natural shape balloon, no mass is computed for a bal-lonet.
(36) Ratio of ballonet surface area to balloon surfacearea, rB (BALNR):-
rB = 1-.27e1 .1 90
a - ALPHA -Helium volume/balloon volume
If altitude control is not specified, statements 24 and25 set BALNR equal to zero, and ALPHA equal to one. State-ment number 36 is skipped.
(37) Differential pressure, AP(DELTAP):
AP - P (.86M& +11+F))(1-.862a) (-F÷)
*See explanation of number, paragraph 4.1.3.
32

F - F - Free lift/(system weight)
- ALPHA + Helium volume/balloon volume
P + PRESS + Ambient pressure at altitude
4.1.3.2 Balloon Equations. All balloon parameters are com-puted in the SHAPE subroutine. Statement numbers listed herecorrespond to the compiler printout of the SHAPE subroutineincluded in Appendix A.
4.1.3.2.1 Natural Shape. Natural shape parameters are basedon the following assumptions:
1. Ballast requirement of 10% of gross mass/day
2. E* .
3. Wb/W* - .32
4. CD - .33 Based on (volume)2/S
It should be noted that the HASKV program is not com-pletely accurate for a natural shape balloon. Equations forstructure mass, propeller radius, and wire lengths are basedon a Class C shape. Since the natural shape balloon uses agondola, structure mass would be larger and wire mass smaller.Also, the propeller radius was sized to operate in the wakeof an aerodynamic shape balloon.
(5) Volume, V(VOL):
V - 3.45 R'
R - RENV - Radius of Envelope
(6) Gross lift, G(GROSS):
G - V(b)
b - HLIFT - Helium lift at altitude
*S81C Nomenclature
33

(7) Ballast mass, Mb (BASTM):
Mb G(l.-'9N)
N - DAYS + Mission time in days
(8) Envelope mass, M,(ENVM):
- .243G
4.1.3.2.2 Class C Shape.
(12) Volume, V(Vo0);
V - 4.0584 fR:
f - FIN - Fineness ratio
R - RENV - Radius of envelope
(13) Surface Area, S(S):
The basic equation is: S-KL2
L - ALENG - Inflated length
K - Constant - Function of f
L - 2Rf and S = 4KR 2 f 2
K as function of f was determined graphically to be:
K - 2.641f-1*0 4 32
Substituting, the computer equation becomes:
S - (4)2.641R2f(2"-1 .0 s2)
- 10.564R2 f.' 5 16
(14) Skin thickness# t(TSKIN):
t - 1000(AP)R/o
34
r/

- SMAT - Material stress allowable
AP - DELTAP - Differential pressure
(15-23) Envelope mass, M (ENVM):
Me M (aa+Pe (t) tave/t)S
Ca - ADHE - Adhesive mass/M2
Pe M SKIND - Density of envelope materialkg/M2 (mm)
tave/t - SKINR - Factor applied to envelope thick-ness for thickness variation
(18) Tape mass, MT(TAPEM):
MT - N(GL)Tw(Tt) pt
Assume: Tape width, Tw - 1.25 inches - .0318 m
Tape thickness, Tt = tape + tape adhesive- 4t
Tape density, pt p
MT - .0318(N) (GL) (4 t) Pe
- .127N(GL) (t)pe
N - NG = Number of gores
GL = GL = Gore length
(19) Add tape mass to envelope mass:
M - Me+Me e T
(20) Fin mass, MF(FINM) :MT - rfMe
35
....... .. . ....

r - FINMR - Ratio of fin mass to envelope mass
(21) Ballonet mass, MB(1BALNM) :
MB BS(Oa+Pet/ 2 )
"(23) Total envelope mass, H (ENVM): .1
Me M- +M+M
Return to Main Program.
(58) Net lift, L,(ALIFT):
Ls -%h-MIs
bh- HLIFT(IA) = Helium lift at altitude
(59) Aerodynamic drag, D(DRAG):D =- qCD¥'667 •
D %
q - Q - Dynamic pressure
C - CD u Drag coefficientD(60) Power required, P (PREQ):
reqPreq - "OO1DV (kW)
V - V1IND - Velocity
This is propulsion power required out of the propeller.The program repeatedly used PREQ for computing componentmasses. Its value, however, depends upon the component beingconsidered. For example, i.f PREQ is divided by propeller ef-fiency, it becomes the power required out of the speed re-ducer. Its value is changed but the variable name is not.In specific instances where the power in or out of a compon-ent is a parameter to be used later, a new variable is de-fined and stored.
36

(6) ropeller radus, Rr (JR
R AS5Rr'"he ratio of .45 of enve~lope radius is based on an ap-
proximation of the balloon wake which optimized propeller ¶performance.
4.1.3.3 Power Source Equations. All. component masses ofthe power source are computed within the power subroutine.Statement numbers listed here correspond to the~ compilerprintout of the POWER subroutine included in Appendix A.
4.1.3.3.1 Combustion Engine Equations.
(5) Back up battery mass =total battery mass,MBB (TBATM):
MBB B EB
B = BAT]. H:~ass coefficient of primary storage
battery
EU BENGY Back up energy (
(7) Engine mass, M,(TMM):
ME M Mer,ýqpo/ (pCR) +Mi0
Me =UMMl = Engine mass/unit power out
P0 SRHO - Standard sea level air density
P= RHO = Air density at altitude
CR -TUP.BOR -Turbocharger compression ratio
H CMM1 = Erngi~n mass at zero power (Y inter-ce~pt).
(8) Fuel massf, MfCFUELM):
=f sfc-4P )treq os
s fc SFCJ - Spedific fuel consumption for inter-nal combustion engine
ts TS Time on station
37

I
(9) Fuel tank mass, Kft(TA ):
Xft -R~t/f? 4f+14f1CEI4
Rt/f - TMR1 -Ratio of tank mass to fuel mass -t/ I.C. engines
M - UFLM - Fuel Line mass/unit lengthf2.
(10) Tail structure mass, Mstr (STRM):
Mstr R (N+Mp+.9M )+4
Rstr = STRMR = Ratio of structure mass to support-ed mass
M = PROPM - Propeller and hub massPX = ADDMI = Additional mass required for engine
operation
CMMI - Structure mass when supported mass -zero (Y intercept)
(11) Wire mass, Mw(TWIRM):
= .6L (NIwI+N2 w2 )
N1 = 2 - Number of wires
w, WIRE1 = Mass coefficient of alternator tocontrol package wire
N2 = 3= Number of wires
w WIRE2 = Mass coefficient of command unit toengine wire
4.1.3.3.2 Electric Power Source Equations.
(14) Speed reducer mass, Msr CSPRM) :
M = SPR - Speed reducer mass/unit power out
Psr(out) - PREQ - Power out of speed reducer
38
.....................

(16) Motor mass, MI(TMM):
- 1? (out) ",mmm - UMM2 = Motor mass/unit power out
Prt(o~t) m PREQ - Power required out of the motor
Cm - CMM2 - Motor mass at zero power CY intercept)
(17) Power into motor, Pi(PIJ4):
m
Em EM = Efficiency of motor
(18) Required power out of power source, Preq (PREQ)-
rreqPre = Pi/Es + Pss/Es '
Eps = ECPPS = Efficiency of control package forpower source
Ps5 SUBPOW = Subsystem power required
E = ECPSS - Efficiency of control package forus ssubsystem power
4.1.3.3.2.1 Fuel Cell.
(20) Cell mass, Mc(CELLM);
MC = C0+C1V+C2V2
V = VOLTFC , System voltage for fuel callCo = CFCM Fuel cell mass at zero volts (Y inter-
cept)
C1 CELLI = Coefficient for fuel cell mass/volt
C = CELL2 = Coefficient for fuel uell mass/volt 22
(21) Fuel mass, Mf (FUELM):
39

Zf -a fc(Outl taD
sfc - SFC2 - Specific fuel consumption of fuel
Pf (out) " PREQ - Power required out of fuel cell
D - DUTY - Duty cycle or ratio of operating timeto mission time
Fuel mass is considered independent of the fuel celland is printed separate of fuel cell mass.
(22) Fuel tank mass,Mft (TAIKIK):
t ft - Rt/f~f
Rt/f = TMR2 - Ratio of tank mass to fuel mass*
(23) Radiator Mass, Mr(RADM):
- rPfc(out)
Kr - RAD - Radiator mass/unit power out of fuelcell
(24) Fuel cell mass, Mf (TFCM):14c
fc c ft+Mr
4.1.3.3.2.2 Solar Array.
(31) Power required from battery, Po(PQOB.):PO Rim ('P./PD +Ps/s EP/D - PNBYPD Ratio of power required at night
to that of day
(32-35) Secondary battery mass, MB (BATMI):
A battery mass is first computed based on the capacity
40

(amp - hr) of the battery. The charging current required to
reach full charge during daylight hours is then computed.If it exceeds the maximum allowable charge current for thebattery, the number of parallel strings is increased. Theamount of increase is equal to calculated charge currentdivided by allowable charge current. Battery mass is nowsized by charging current and not capacity. A!
(32) MB (ATM),
Mi PMB POB ( Bb !'""N/Bcy.:"
Ba BAT2 = Ratio of cell mass to cell voltage -corrected for packaging losses.
TN - HRN - Hours of night
Bcy - BATCY - Battery capacity corrected for num-ber of charge - discharge cycles.
(33) Charging current, Ic (XIC):
Ic -Bcy/(TsEB)TS - HRS a Hours of sunlight
EB BCHEF - Battery charging efficienty - elec-trical to chemical conversion
(35) Battery mass sized by charging current, MB(BATM):
"MB MB(Ic/Bcc)
Bcc BATCC Maximum allowable charge current forbattery
I ,1
O. ... .. ... ..W

(39) If N/Dis loes than one, motor mass is increas-ed for second motor* Mm(TMM):
1Mm Mm + Pim(EM) (P /PC
All variables as defined previously.
(40) Power required out of solar array, Posa(PREQ):
03a -Preq 08 1.2P B/ECPB
1.22 -Ratio of charging voltage to dischargingvoltage.
ECP8 ECPB -Efficiency of control package forbattery
(41) Solar array mass, Msa(TSAZ4):
Msa inosa g9msa 4)
Fg GEOF Geometry factor
Ms- SA -Solar array mass/unit power out
w4- WIRE4 -Interconnecting wire for solar array
4.1.3.3.2.3 Battery.
(46) Primary battery mass, MPB(TBATM):
MPB B- B(PreqT a+EBU)
All variables previously defined.
42

4.2 Analysis of Parametric Data
A series of graphs have been developed which summarizethe computer output of the parametric study. These graphs,along with other pertinent information, were the basis forthe selection of an optimum vehicle choice to meet the mis-sion requirements. The basic power sources considered inthis studyl namely, solar cell array, fuel cell, battery,gas turbine, Diesel engine, and Wankel engine have been plot-ted. For reasons explained below and in Section 4.3, themost thorough comparison was made between solar cell arrayand fuel cell powered systems. By analyzing these graphs,comparisons can be made between these power sources to de-termine the most optimum system for a given set of condi-tions. In addition to the power source comparisons, thesegraphs show the parameters to which a particular system ismost sensitive; such as, balloon material type and stresslimit, free lift, coefficient of drag, and mission require-ments (duration, altitude, speed, payload mass, and payloadpower). The system sensitivity to certain parameters isdiscussed in more detail in Section 4.2.2. Essentiallythen, this analysis has explored mission, feasibility, andconstruction parameterst and this analysis has helped to de-fine the final mission requirements.
4.2.1 Discussion of Graphs
The following graphs, Figures 4.3 - 4.9 were derivedusing a standard value for the basic design parameters.Generally one of these parameters was varied while the re-mainder were set at the standard values. The standardparameter values are:
Material type - biaxially oriented Nylon 6
Material stress limit - 8300 N/cm2
Altitude - 21 km
Free lift - 20%
Coefficient of drag - .05
Duration - 7 days
Payload mass - 90 kg
Payload power -O W
43

24 - - - - - - - - - -'
22 _ --------------------- -Fuel Cell
20 l
- - - -- -Battheries
LA -4----- --- - ---- Solar callI 10 hro
14 - 1 - - -- - --
32 1 .- - - 4 - 4 -- "as T urb in
10- e- Solatr Cell
-X- Wankel
14 hro
-pDiesel
0 2 46 6I1012 1416 18 2022 24DURATION (DAYS)
24 a - - - S
22 - - - - - - -
20-- - -
014
10
00 2 46 810 12 1416f1620 2224
DURATION (DAYS)L Figure4.3 Effects~ of durtononpropulsi1on poel and1yste
mass for all concepts.
44

14 7 . .....- -
_0- 5 o----------- -S~Ii
8 I4
6 3
00_24 2
S.... ,. / / ..w,
2ON- - 0 - -mmmmm
.1. 0 2 4 6 8 10 12 14 0 2 4 6 8 10 12 14VELOCITY (m/8) VELOCITY (M/8)
'24
-'/Solar Cell12 hrs. sunlight•20
Solar Cell
00 --- Fuel Cell
0
C'4
0 '0 .?0 .40 .60 .80 1.0 1.2
VELOCITi'Y NIGHT/VELOCITY DAY
Figure 4.4 Effects of velocity on propulsion powerand system mass.
45
,:, ••• ...._,... ..... . ... -. r n - .

I.,
18 9-
3-.
0
>J0 . ..4... -- -
0 18 19 20 21 2223 0 20 21. 2223ALTITUDE (km) ALTITUDE(kn)
600 -g- - EasSolar Call
ONrSoo -Fuiel Cell
S300-
0 ... .. C 1 9... ....
F' -TIIEkm
FigureO -. Efet fliueoAsse dsq.
H4

12 -- 241f
6 12
2 04
0 8 9 10 11 12 13 0 .04 .05 .06 .07 .08 .09
MAX. STRESS ALLOWABLE COEFFICIENT OF DRAG(1000 N/Icm)
412
12 -. Solar Cell 4 mo.V1 iPolyester
8-- it_ - - SolarCell 4mo.
. ---- Solar Cell6 Nylon
4 - - - - - -- - Fuel CellNylon
- - • Fuel CellPolyester
0 5 10 15 20 25 30FREE LIFT %
Figure 4.6 Effects of material strams, coefficient of drag,
and free lift. on propulsion power.
47

Solar Cell
- - -. Solar Cell 3 Panels2 M4at'l Thickness
Solar Cell 5 Panels3 Mat'1 Thickness
-.- Fuel Cell
.0 e-10 -.*e ual Cell 3 Panels2 Mat'3. Thickness
2 -9. Fuel Cell 5 Panels3 Mat'l Thickness
0 2 4 6 8 10 12DURATION4(DAYS)
6-- - o--7
2Ol
'-04
0 2 4 6 8 10 12DURATION~(DAYS)
Figure 4.7 Etfects of using more than one material thicknesson propulsion power and-systeM mass.
48
lif 0--

A6
5 . Solar Call A/C*18-21 km4"- -- -- Vn/Vd"-A Solar Cell A/C 18-21 km
V//Vd - .2
Solar Cell 21 km
Solar Cell A/C 18-21 km
Fuel Cell A/C 18-21 km
Fuel Cell 21 km0 2 4 6 8 10 12
*A/C - Altitude ControlDURATION(DAYS} with an average velocityof 7.7 m/s.
Note: All curves generated fornylon film with a stressof 12,400 N/cm2
CI
0 2 4 6 8 10 12DURATION (DAYS)
Figure 4.8 Effects of using altitude control on"propu] ;ion power and system mass.
49
.i ..... . .. ... ...

12 --- -
101- __
0 20 40 60 80 100 110FAYLOAD MASS (kg)
Fuel Cell
12
10
o 4
PA~YLOAD POWIER (kW) '
Figure 4.9 Effects of payload mass and powerrequirements. on, propuir ion power.
50

Velocity ratio - .333 (Solar cell array only)
Tank mass ratio - .5 (Fuel cell only)
Sunlight - 12 hr/day (Solar cell array only)
4.2.1.1 Discussion of Figure 4.3. The graphs presented inFigure 4.3 compare the propulsion power and system mass ofall the basic concepts considered in this study contract.The power values shown represent the net power required outof the propeller to propel the airship forward; i.e., thrustmultiplied times velocity. '.4he mass versus duration andpower versus duration curves appear sin-ilar because mass isproportional to the square root of the propulsion power cubed.
Since system power and mass are excessively large for asolar cell array system operating at 10.3r m/s (20 kn) air-speed, it was decided to fly 5.1 m/s (10 kn) at night and15.4 m/s '30 kn) during the day to give a 10.3 m/s (20 kn)average for 24 hours. Thus, the solar cell array curves areshown with a VN/VD ratio of 10:30 (V./VD = .333, see Figure4.4). By flying at 5.1 m/s (10 kn) airspeed at night thebattery mass required to operate the system while the solar
T cells are inoperable is reduced by a factor of 46. This re-duces the system mass considerably as noted on the mass ver-sus duration curve. here the crossover with the fuel cellsystem is between 5 and 6 days, whereas on the power versusJuration curve the crossover is at 18 6ays. This results be-cause the power value furnished by the solar cell array mustbe sufficient for 15.4 m/s (30 kn) operation whereas theother concepts operate continuously at 10.3 m/s (20 kn).
On these base data curves the charge-discharge cyclesfor the batteries have been consideredl and consequently,the solar cell array power and mass requirements increaseslightly as the number of charge-discharge cycles for thebatteries increase. On the power versus duration curve,three solar cell array curves are plotted for 10, 12, and 14hours of sunlight to allow for operation of the solar poweredairship at different latitudes and times of year. With 2hours less sunlight the propulsion power required increasesapproximately 11% whereas with 2 additional hours of sunlightthe propulsion power decreases approximately 8%.
The power required and the system mass are excessively
high, as shown, for the battery case. The best availablebatteries 254 W-hr/kg (115 W-hr/lb) are presented. Batterieswill not be considered in any of the other graphs since sys-
51

tem size becomes too large beyond a one day mission.
The base data curves, as well as all remaining curves,show a fuel cell system utilizing a TMR value of .51 i.e.,the tank mass is .5 times the fuel mass. The relative ad-vantage of using a lightweight tank can be shown by using aTMR value of .85. For a 7 day mission, the power requireddrops by approximately .5 kW and system mass by approximate-ly 20% for the TMR value of .5 as compared to .85.
The gas turbine, Wankel and Diesel engine curves areall hypothetically superior power sources in terms of pro-pulsion power required and system mass. However, none ofthese power sources have been tested for high altitude oper-ation. A development program would need to be performed inorder to instill confidence in any oZ these systems, whereasthe fuel cell and the solar cell array have been used forspace flights with high reliability. Also, fuel cells andsolar cells are available. 7'he Wankel and Diesel curves aremuch lower than the gas turbine curve due to a lower speci-fic fuel consumption, i.e., .024 kg/kW-hr (.4 lb/hp-hr) ver-sus .73 kg/kW-hr (1.2 lb/hp-hr). All three of the internalcombustion power sources would require either a ballonet orpump and valving scheme to maintain altitude as fuel is con-sumed. This would require additional power and system masswhich has not been included in these curves. These curvesconsequently would be shifted higher on the graph to compen-sate for the additional power and mass. Since these powersources are not considered reliable or tested sources, thiseffort was not pursued.
4.2.1.2 Discussion of Figure 4.4. Wind velocity is one ofthe most sensitive parameters for any of the given systems.It has been decided that the most favorable winds exist atthe 21 km (70,000 ft) altitude level. The first two graphsof Figure 4.4 show the effect of velocity on propulsionpower and system mass. The velocity scale of the graphs isaverage velocity so that a comparison can be made between 21
the two systems although the solar cell system has been de-signed to fly at higher velocities during daylight hours.For the solar powered system, power increases from approxi-mately .5 kW at 5.1 m/s (10 kn) to approximately 3 k1 at7.7 m/s (15 kn', and from 7.7 to 10.3 m/s (15 to 20 kn) powerincreases from 3 kW to 13 kW. If the system size were con-stant, propulsion power would increase as the cube of thevelocity; however, since the system necessarily grows largerto accommodate the increased propulsion system weight thepower increases even more than the cube of the velocity.
52

The system mass for the solar cell nearly doubles between5.1 and 7.7 m/s (10 and 15 kn) and triples between 7.7 and10.3 m/s (15 and 20 kn). Beyond an average velocity of 10.3m/s (20 kn) the system mass grows even faster.
The third graph of Figure 4.4 was plotted to determinethe optimum flight velocity for day and night operation fora solar cell powered vehicle to obtain a 10.3 m/s (20 kn)average airspeed for a 24 hour period. By flying 15.4 m/s(30 kn) during the day, while the solar cells are poweringthe vehicle, and 5.1 m/s (10 kn) during the night, on batterypower, system power and mass are minimized. However, thiscurve is relatively flat near the optimum velocity ratio andslight deviations from a VN/VD value of .333 would be accept-able.
4.2.1.3 Discussion of Figure 4.5. The three graphs of Fig-ure 4.5 show the effect of altitude on propulsion power, mass,and skin thickness. As altitude is increased, less power isrequired due to lower density air. This, along with a lowersuperpressure which results because of the decreased absolutepressure, reduces the thickness of the envelope. As the en-velope thickness decreases, the system mass consequently be-comes lighter. By going frcm 18 to 21 km (60,000 to 70,000ft) the propulsion power for a solar cell system decreases byapproximately 25% (6,850 kg to 5,150 kg). But even more im-portant is the decrease in skin thickness. The envelope skinthickness for a solar cell system drops from 390 pm (15.4 mil)to 220 jim (8.7 mil). The 220 wm (8.7 mil) material couldpossibly be manufactured by laminating two layers of nylonwhereas the 15.4 mil material would require a quad-laminate.This would increase system mass slightly since two additionallayers of adhesive would be required for the quad-laminate.The computer program assumed a bi-laminate material with onethickness of adhesive. By going to multi-laminate materialthe system mass would be even larger than the graph shows.
4.1.1.4 Discussion of Figure 4.6 The first graph of Ficgure4.6 shows power versus maximum stress allowable for a solarcell array and a fuel cell system employing polyester and ny-lon films. As shown, either system is very sensitive to thetype of and maximum allowable stress of the material. Bothnylon and polyester have been plotted for stress levels from8,300 to 12,400 N/cm2 (12,000 to 18,000 lb/in2 ). This graphdoes indicate the need for a materials study; for example:if a nylon material with an allowable stress of 12,400 N/cm2
(18,000 lb/in2 ) could be used an approximate savings of 65%could be realized in propulsion power for a solar cell system
53

ýI'Ias well as a substantial decrease in system mass.
The second graph of Figure 4.6 shows the sensitivity ofthe systems to the coefficient of drag, the parameter forwhich very little reliable da-'a have been generated. All ofthe graphs in this series utilize a coefficient of drag of.05 which is based on analysis and past experience with ahigh altitude airship. 10 ' 1 For a solar cell system, thegraph shows propulsion power increasing 2.5 times as CD in-creases from .04 to .06.
Free lift is another parameter to which the system isvery sensitive as shown in the third graph of Figure 4.6.The minimum free lift required is dependent on the negativesupertemperature. It was determined that the minimum freelist should be 20% to maintain pressurization at the 21,000 m(70,000 ft) altitude level. Beyond 20%, as shown by thegraph, system power requirements, as well as mass, grow veryrapidly for either the solar cell or fuel cell vehicles.
4.2.1.5 Discussion of Figure 4.7, The graphs presented inFigure 4.7 compare the power and mass of the basic systemswith the power and mass of systems which utilized more thanone material thickness for the balioon construction. TheVraphs show the tradeoff for both a solar cell array and afuel cell system using either two or three material thick-nesses. This requires a junction between the differentthicknesses of material. Since stresses are highest near thelargest diameter of the balloon and diminish near the ends,lighter gauge materials can be used at the nose and tail ends.This reduces the balloon mass and minimizes the system size.The two material thickness case would incorporate the thinnermaterial at the nose, the heavier material through the mid-"section, and the thinner material again at the tail end. Thesame technique is used in the three material thickness casewith tw*.. additional locations added to change material thick-ness. For a solar cell array powered system using two mater-ial thicknesses, a savings of 27% can be realized in systempower and 37% in system mass. By going to three materialthicknesses, a savings of 35% can be realized in system powerand 48% in system mass. Thus, by varying the material thick-ness at discrete locations in the envelope a substantial sa-vings in power and mass can be accomplished.
4.2.1.6 Discussion of Figure 4.8. The comparison with andwithout altitude control is shown in Figure 4.8 by the curveslabeled A/C for altitude control. The altitude control curvesare plotted using a velocity of 7.7 m/s (15 kn) since the
54

reason for using altitude control is to seek out a minimumwind field, whereas the curves without altitude control areplotted with a velocity of 10.3 m/s (20 kn). The solar cellarray altitude control curves are plotted with VN/VD valuesof 5/25 and 10/20 to determine the most favorable com-bination of day-night velocities to obtain a 24 hour averageof 7.7 m/s (15 kn). By flying 10.3 m/s (20 kn) during theday and 5.1 m/s (10 kn) at night the solar cell power andsystem mass are minimized. The propulsion power as well asmass for both solar cell array and fuel cell is substantiallylarger by incorporating altitude control. These curves weregenerated with a nylon material skin stress of 12,400 N/cm2
(18,000 Wb/in 2 ) in order to obtain a solution. Also, altitudecontrol complicates the system design and construction of thesystem.
4.2.1.7 Discussion of Figure 4.9. Payload requirements inthe range from 0 to 90 kg (0 to 200 lbm) and from 0 to 2 kWaffect the fuel cell system propulsion power as shown in Fig-ure 4.9. It should be recalled that the power values shownare in addition to the payload power, inefficiency losses,gimbal operation, and electronic system requirements. Thepayload mass has little effect as would be expected, since the90 kg (200 lbm) payload mass is such a small part of the to-tal system mass. The payload power variation does, however,make significant changes in the system propulsion v•ower re-quirements.
4.2.2 Sensitivity AnalysisAn analysis was performed to determine the sensitivity
of the system design to small changes in numerical values ofall design parameters. The HASKV computer program was usedto generate data for a one per cent variation of each param-eter. Each parameter was varied independently, and all varia-tions were taken as positive. Thus, parameter X became X +AX = (1.01). Except for X, all the other parameters were thesame. A complete solution was required for each parameterthat was varied. The system mass chanqe, AM, and absolutepercentage change, lAM/MI, were calculated. The following ta-ble gives the results of the analysis in order of decreasingsensitivity.
The most sensitive design parameter is the allowable ma-terial stress, SMAT, where a 1% increase reduces the systemmass by over 4%. The next most sensitive design parameter isthe envelope material density, SKIND, where a 1% increase willincrease system mass by 3.7%. Material thickness factor,
55
.A1• i"l

SKINR, significantly affects the system design. By construc-ting the envelope from different material thicknesses, asdiscussed in Section 4.2.1.5, a considerable savings in systemmass can be realized. Parameters such as free lift, F, and
•supertemperature, SUPERT, greatly influence the system designas noted by the mass changes. Prediction of these parametersis very critical because of their influence on system mass.It is obvious that discretion must be used in all assumptionsif a feasible system is to ýe designed.
Parameter Increased Mass Change Absolute Mass ChangeByl1% AM AM/MM
SMAT* -66.86 kg 4.01SKIND 61.81 3.70SKINR 55.83 3.35F 43.55 2.61SUPERT 27.30 1.64SFC2 10.74 .644CD 10.53 .631PAYM 9.77 .585SUBPOW 9.44 .566TMR2 4.87 .292CFCM 4.74 .284FINMR 4.73 .283CELL1 4.72 .283VOLTFC 4.71 .282ADHE 4.68 .280PROP 4.65 .279RAD 4.62 .277UMM2 4.55 .273STRMR 4.50 .269FIN 4.08 .245EPROP - 1.65 .099ESPR - 1.65 .099EM - 1.53 .092ECPPS - 1.47 .088ECPSS - .58 .035CMM2 .05 .0029WIRE3 .05 .0029BENG4 .03 .0018CELL2 .02 .0012CSTRM .01 .00059
*See Section 4.1.2 for definition of nomenclature.
TABLE 4.1 SENSITIVITY OF SYSTEM MASS TO VARIOUS DESIGNPARA•ETERS
56

4.3 System Concent Choice
The parametric study investigated concepts applicable tothe system requirements. Other than the engineering analysisof the graphs there are several other factors which influencethe choice of the system concept to be designed for the mis-sion. The primary factors are cost, availability, reliabil-ity, vulnerability, and logistics. There is little specificinformation available at this time on any of these factorssince this is a specialized design utilizing state-of-the-artcomponents almost exclusively. However, general comments re-garding the effect of each of these factors are discussed be-low. In addition tc this discussion a System Concepts Com-parison table, Table 4.2, has been compiled summarizing theprimary factors and should be referred to.
Reliability of various system components and complexityof the entire system which determines feasibility is themost important choice factor. Solar cell arrays and fuelcells are proven and reliable power sources. Fuel cell oper-ational designs encompassing environments ranging from under-sea to outerspace and including underground use have been ac-complished. Solar cells as well have a proven record forouterspace flights and have been used on a short durationpowered balloon flight. 1 0
Batteries are a very reliable power source; however, asdiscussed in Section 4.2.1.1, a battery powered vehicle be-comes excessively heavy for flights beyond a one day mission.
Reliability of internal combustion engines and gas tur-bines has not been proved for altitudes above 12 km (40,000ft). Above this altitude ignition cannot be assured and aturbocharger is required to maintain a high compression ratio.
A heater may also be required for the fuel. These additionalcomponents would necessarily complicate the design of thesepower sources and decrease reliability. The internal combus-tion engine and gas turbine engine could someday prove to bethe most favorable power sources for short duration (one week),but without a development effort they must be considered un-reliable.
Cost is considered to be an important choice factor.However, there are other serious considerations. Since onlyparts of this system will be recoverable (see Section 5.5) itis necessary to compare the cost effectiveness of various sys-tem concepts under normal operational use. Of the varioustypes of power sources considered it is highly likely that
57
.\,

SYSTEM CONCEPT ADVANTAGES DZSADVANTAGE MUFACTURNG AVAILABILZTY RELZIAILITY(POWER SOURCE) COSTS
Extended duration Array likely not recoverablesolar Array for future
development Cost
Complexity - Eleotronics High 6 no.-I year Good -Exoellent
System size large for 7day duration
Fuel Cell Proven Development necessary Moderate 1 year Good -
reliability ExcellentFuel & Tanks - "Exotic" "
High light-off speed
System size Unproven for high altitude LowGee Turbine minimized to 1 year Fair - Good
Development necessary ModerateCost
Requires altitude stabili-Motion
Gimbaling of engine
Vi Heating may be required
System usie Unproven for high altitudeWankel minimized
f'evolopment necessary Low 6 mo. Fair.- Good"Cost
Requires altitude stabili-zation
Gimbaling of engine
Heating day be required
System size Unproven for high altitudeDiesel minimized
Cost Development necessary Low 6 mo. Fair - Good
Requires altitude etabili-zation
Gimbaling of engine
Excessively large system
Batteries Simplicity Cost High 4 mo. Excellent
Structure design
TABLE 4.2 SYSTEM CONCEPTS COMPARISON
58

the solar array would be most difficult, if not impossible,to retrieve. Since the solar cells are adhered to the bal-loon surface and cover a large area they cannot be detached
4 in flight and the balloon itself is not considered retrieva-ble. For long duration missions the economic problem is notas serious since the solar cell cost can be amortized over alonger period of time.
The fuel cell is considered recoverablei however, forsafety reasons the tanks may be separated before being re-leased from the balloon and parachuted separately. There isalso a possibility that the fuel cell and tanks may be dam-aged upon impact. To keep from damaging the fuel cell a mid-air snatch recovery may be desirable.
All components of the internal combustion and gas tur-bine power sources are considered recoverable, but here againa snatch recovery may be required to eliminate impact damage.
Exc'pt for variations in power source costs all othercomponents of the various systems, such as motors, reducers,telemetry, structures, propeller, etc., will incur similarexpenses providing they are of the same size. It is general-ly conced6d, however, that the smaller the system the lowerthe cost.
Availability of power sources and components is of primeconsideration. Development of components must also be takeninto account in the lead time necessary for procurement sincethe majority of the components are unique to the system de-signi and consequently, they are not off-the-shelf items.There are no major problems anticipated in procurement and nodefinite advantages of one type over another; however, actualprocurement time necessary for the various power sources andcomponents can only be estimated at this time.
Vulnerability is not considered to be a very importantfactor for variations in system concept. Because of the fra-gile nature of the balloon itself, necessary design measuressuch as wear patches and protective coverings are required ofany of the power source systems and components. Since themission requirement is for a station keeping vehicle the sys-tem is not vulnerable to impact shocks associated with launch-es and landings.
The logistics involved will naturally affect the opera-tional costs of the system. However, except for the fuelcell L02 and LH2 logistics costs would not vary significantly
59
"h.I

between system concepts: and, as with vulnerability, logis-tics is not a very important factor in making a tradeoff be-tween the systems,
In review of the System Concepts Comparison table andthe graphical analysis, if it is assumed that all conceptsare feasible, then reliability and cost are considered to bethe most important factors. Since all of the low cost sys-tems have unproved power sources these systems are beingruled out without an R & D program to develop a gas turbine,rotary piston, or Diesel engine.
As mentioned previously, the battery choice can be ruledout since it is not operationally feasible because of systemsize. The two remaining power sources, fuel cell and solarcell array, are considered the only feasible sources for asystem.
The fuel cell concept appears attractive for missionsup to one week in duration. Beyond one week the fuel cellsystem becomes increasingly large due to the additional fuelrequired to propel the system. As mentioned, the fuel cellis a very reliable, proven source with little developmenteffort necessary. With operational restrictions and increas-ed cost, the solar array powered vehicle is not consideredas being competitive with the fuel cell powered system forshort duration. It should be noted that for extremely longduration missions the solar array concent would be the onlyfeasible choice.
The final choice then for this 7 day mission was thefuel cell powered vehicle. Even though the biaxially orien-ted nylon film has not been fully investigated it was decidedto assume its use in the design because of the relative ad-vantages of using this film as compared to polyester film.The parametric analysis reveals that employing altitude con-trol is not justified and would compromise the reliabilityof the system. When altitude cannot be controlled a nominalaltitude of 21.0 km (70,000 ft) is desirable for minimumwinds. Also, skin thickness, power and mass requirements de-crease as altitude increases so that 21.0 km (70,000 ft) isadvantageous in optimizing the system as compared to 18.0 m(60,000 ft).
60

5. SYSTEM DESIGN
The system design for the POBAL-S powered airship isbased on the use of an aerodynamic shaped superpress re bal-loon meeting the following performance requirements*.
Duration 7 day under continuous operationAirspeed Constant at 8.18 m/s (15.9 kn)Altitude Constant at 21 km (70,000 ft)Payload Weight 890 N (200 lb)Payload Power Continuous 500 W
The airship is propeller driven with the power being sup-plied by a fuel cell through an electric motor. The overallairship is shown in Figure 5.1.
5.1 Vehicle
The POBAL-S vehicle consists of the balloon, which isthe basic floating platform, along with the stern structureand gondola which provide mechanical support interfacing be-tween the balloon and the components contained within thesestructures.
5.1.1 Balloon
The balloon is the inflatable member of the system.From a manufacturing and technology standpoint, the balloonis considered to include not only the basic envelope, or hull,but also the fins. These components are discussed below.
5.1.1.1 Hull. The POBAL-S hull is a Class C shape with afineness ratio of 5.0. The inflated length is 113 m (371 ft)and the volume is 29,270 m3 (1,034,000 ft 3 ). The primary en-velope material is a biaxially oriented Nylon 6 film lamina-tion.** The airship hull is shown in Figure 5.2.
The envelope load distribution for a pressurized aero-dynamic shape hull is approximately that of a cylinderl longi-tudinal skin loading being about half the circumferentialloading. In addition, the loading is proportional to the dis-tance from the axis to the envelope, measured perpendicularto the envelope. Thus, the loads are maximum at the maximum
*See footnote on page 7.
**Tests were performed on this material and are reportedon in Appendix B.
61

$44
0...
(e
H 0%
U a
SI-
62
"] iA
S• • _ '•u• .. .. • •, •.. .. ...... ... .... ,, • ,, .. .

'r-4
tn U ' Ir C(D :c
Ln 11 m-rIJ1C~C0e-4 'I r-*
-C-
IwoJ
o C4 qI.'.
r4_ _ _ _ _ r.i*
ý-.
~W E4. rl4
63

diameter and minimum at the fore and aft ends. Minimum hullmass requires a material whose thickness can be varied tomaintain a nearly constant stress over the length of the bal-loon.* Skin thickness variation for the POBAL-S hull is ac-complished by constructing the hull in seven sections usingfour different thicknesses. The four thicknesses requiredare obtained by using multiple laminations of 25.4 pm (1 mil)material. Presently, 25 um (I mil) is the maximum thicknessavailable for biaxially oriented Nylon 6 in the 1500 mm (59ini width. For the design stress of 9,825 N/cm2 (14,250 lb/in ), the four laminates are 102 Pm (4 mil), 127 im (5 mil),152 -m (6 mil) , 203 Pm (8 mil).
The gore seals should be constructed as a butt seal withan outside tape 5.1 cm (2 inches) wide and inside tape 3.8 cm(1.5 inches) wide. Outside tape thickness will be 25 pm (Imil) greater than the inside tape thickness. A seal construc-tion requirement is that the total tape thickness, excludingadhesive, be 25 um (1 mil) greater than the maximum laminatethickness being sealed. The fore and aft sections use a to-Lal tape thicknesJ of 127 im (5 mil), the 127 jim (5 mil) sec-tions use a tape thickness of 152 um (6 mil), the 152 um (6mil) sections use a tape thickness of 178 um (7 mil), and thecenter section uses a tape thickness of 229 pm (9 mil).
The balloon should be assembled as described below.First, all sections are sealed leaving the bottom longitudinalseal open. Then the sections are sealed together still leav-ing the bottom seal open. A final trim is made to removestress concentration points at junctions, and then the finallongitudinal seal is made along the length of the balloon.End caps are finally installed. All external and internal at-tachments should be installed on individual gores prior tosealing of the gore. In instances where this is not feasible,attachments should be made as early in the assembly sequenceas possible.
All loads on the balloon are carried by the balloon act-ing as a pressurized beam. The critical bending moment whichcauses the beam to buckle is7 :
M", AP~rrr
•H~u mass would increase by 11% for the same hull con-structed with longitudinal gores of a single 152 wm (6 mil)laminate.
64

"wh'ire AP is the differential pressure and r is the radius ofthe cross section.
The force, F, required to buckle the balloon at any giv-en section is:
Flu Mc/L
where L is the axial length from the section to the pointwhere the force is acting. Substituting for Mc the equationbecomes:
F = APrrr/LY
Upon examination of the equation, it should be noted that AP -is constant for any section of the balloon. Also, since theradius is cubed, its influence on the maximim supportableload F is much greater than the lever arm L. Thus, it is rea-scinable to expect the critical bucklirg sectioni to be locatedat the tail where r is small. This will occur at the tailsince the radius approaches zero but must still carry thebending moment due to the stern structure and propulsion com-ponents.
The buckling force is calculated with the assumption thatit acts at the gimbal axis, one meter aft of the balloon. Adifferential pressure of 238.5 N/m 2 (0.346 ]Y i.") is used.This assumes' an operating altitude of 21 km It,0O0 ft), 20%free lift, and -10% supertemperature. This is anticipated tobe the minimum pressure condition. Station 111.13 correspondsto the location, where the tail reinforcing battens terminate.At this location r has a value of 2.266 m (7.435 ft) and Lhas a value of 2.870 m (9.416 ft). Using these values, thecritical buckling load is determined to be 3,038 N (683 lb) .Since the actual applied load at the gimbal is only 801 N(180 1b), the margin of safety is 2.8. This is more than ade-quate to account for transient loading conditions.
If F is set equal 801 N (18b ib) the equation can besolved ýor the critical buckling pressure. Using a safetyload factor of 1.5:
Apcrit - (1.5) (801 N) (L)/(irr)
= 62.9 N/mr2
For the POBAL-S balloon at 21 km (70,000 ft) with 20%
65

free lift, 94.3 N/mr2 (0.37 lb/in2 ) corresponds to a supertem-perature of -12.6%. The margin of safety for -10% supertem-perature is high, but because of the uncertainty in predict-ing minimum supertemperature, a pressure sensor should beused to shut the propulsion system down before critical buck-ling pressure is reached. A manual remote override should beprovided in case the automatic switch malfunctions.
5.1.1.2 Fins. Fin sizing and location, as shown in Figure5.1, is based on a scale model airship similar to POBAL-S. 1 sTotal surface area for the cross configured fins is 284.8 m2
(3,066 ft 2 ). The mean aerodynamic center is 48.88 m (150.5ft) aft of the center of buoyancy.
The fins are constructed of biaxially oriented Nylon 6material and consist of a 25 pm (1 mil) membrane supported bytwo air inflated cones. The support cone material is 51 um(2 mil) thick. Physical dimensions of a fin are approximate-ly 5.8 m (19 ft) by 12.2 m (40 ft). The base diameter of acone is 1.32 m (4.33 ft), and the tip diameter is 0.20 m (0.66ft).
The cones are separate of the balloon envelope and arepressurized by an air pump, Gast model 0330. Relief valveswould be installed on individual fins or within the pressur-izing system. The air pump can operate continuously, canpressurize to 68% of ambient pressure, and can develop aflow rate of 9.4 x 10-4 M3/ sec (2 ft /min) at no back pres-sure. Because constant pressure can be maintained, the prob-lem of structural failure due to leakage is avoided.
Eince the cones are air inflated separate of the balloon,the critical buckling section will be at the hull/fin inter-face, providing the cone pressure is always greater than thehull pressure. The maximum allowable differential pressurefor an inflated cone is a function of the hoop stress. Thehoop streso is )':
S = pR/(t cos 0)
where p is the differential pressure, R is the radius of cir-
1-IMcLemore, Clyde H., Wind-Tunnel Tests of a 1/10-ScaleAirship Model with Stern Propellers, NASA TN D-1026, LangleyResearch Center, Naticnal Aeronautics and Space Administra-tion. January 1962.
"Roark, Raymond J., Formulas for Stress and Strain, Mc-Graw-Hill. 1965.
66
-k

cumference, t is the material thickness and 0 is the halfcone anqle.
The maximum allowable ditferential pressure is reachedwhen the hoop stress equals the allowable material tensilestress, Ft. By rearranging the equation, the maximum infla-tion pressure is determined by:
pl = (Ft t cos 0)/R'
where the prime designates maximum values.
If the material is stressed to 8,274 N/m 2 (12,000 lb/in 2 ), the present conical confi uration can withstand a dif-ferential pressure of 6,305 N/m (0.914 lb/in2 ). This ismore than 1.3 times the ambient pressure at 21 km (70,000ft). Maintaining a cone pressure greater than the balloonpressure is dependent upon the air pump and not limited bythe material stress. Based on a supertemperature of 10%,the maximum balloon differential pressure will be 1,330 N/m2(0.193 lb/in2 ) or less than 0.3 times the ambient. pressure.
Since the air pump performance is adequate to maintaina cone pressure greater than the hull pressure, the follow-ing analysis takes the hull/fin interface as the criticalbuckling section.
Air loads are assumed to be distributed as follows:
1. Fin aerodynamic loads are applied evenly alongthe quarter cord.
2. All loads are reacted at the base of the cones.
3. Deflection of the cone is computed for an evenlydistributed load.
4. Skin friction drag of the membrane is neglected.
Since the lift force acts at the quarter cord, the for-ward cone reacts three-fourths of the load and the aft coneone-fourth. It is only necessary to show the integrity ofthe forward cone. Critical buckling force is dependent uponthe balloon's minimum differential, and is given by:
Fb Mc/.5L
where Fb is the buckling force, Mc is the critical bending
till 67

moment, and L is the inflated length of cone (.5L is used
since the load is assumed to be evenly distributed.
The critical bending moment, M, is:
Mc - APFTR'
where AP is the cone'differential and R is the cone basecross section radius. Substituting for Mc the equation forcritical buckling forces becomes:
Fb s 2wR3AP/L
For the present configuration:AP = 2.38.5 N/m2 (0.0346 lb/in2 )
R = .66 m (2.2 ft)
, = 5.8 m (19 ft)
"The critical buckling load is 73.8 N (16.6 lb). It isa vector sum of three-fourths of the fin lift and all of theaerodynamic drag acting on the cone. An approximate dragforce is determined by assuming the cone to be a cylinderwith a splitter plate having a C value of 0.591 7. Basedon frontal area and 8.158m /s (1.586 kt) airspeed, the drag
force is 9.5 N (2.1 ib). The critical lift force reactedby the cone is: 2
PLC 0 (73.8' - 9.5).
= 73.2 N (16.5 lb)
Since the cone reacts to three-fourths of the aerodynam-ic lift of the fin, the total lift generated by the fin, Lfis 97.7 N (21.9 lb). This load is the critical bucklinglift for the fin.
A maximum allowable angle of attach for the fin can becalulated from:
Lf - qataSt
where q is the dynamic pressure, at is the fin lift curveA'Hoerner, Sighard F., Fluid-Dynamic Drag. 1958.
68

slope, a is the fin angle of attack, and St is the fin area.
The fins are expected to operate with a lift curve slopein the range of 1.7 to 2.9 rad-1 (0.03 to 0.05 deg-'). Thisanalysis assumes a value of 2.3 rad-! (0.04 deg-') for aIn addition a 1.5 factor, n, is applied to the critical ýinload as a transient condition.
For a velocity of 8.158 m/s (15.86 kn), the angle ofattack must be less than 0.16 rad (9.1 deg) to prevent buck-ling. Since the fins are located on the balloon axis, theangle of attack limitation can be applied directly to theballoon. The additional control provided by the gimbaledthrust vector, should enable the autopilot to maintain anangle of ±.052 rad (±3 deg). The fin design has a margin ofsafety near 2.0.
The deflection of the beam by the "Method of Dummy-UnitLoads" is evaluated as: 1 8
!:C"Y JI dx
where M is the bending moment in terms of x, m is the bend-ing moment in terms of x due to a unit load acting at thesection where y is to be avaluated, E is the modulus ofelasticity, and I is the section moment of inertia.
For an evenly distributed load of "w" per unit length:
M = wx2 /2
and for a unit load at the end point:
-n m = x.
Section moment of inertia for a thin film beam is:I =Tr rt
where:
r = .1 + .56 x/L (x, is opposite cantilevered end)
-v -- n, E.Pr., Analysis and Design of Flight VehicleStructures, Tri-State Offset Co., Cincinnati. 1965.
69
. ...A -

The integral becomes:
L w x' dxY 2Ent(.56) 7 (x + .1786L)'
0
For the design parameters, the integral yields a de-flection of 0.043 m (0.14 ft). Based on test results frompressurized cylinder beams a deflection of 0.15 m (0.49 ft)to 0.23 m (0.75 ft) is predicted.' However, the loadingcondition was an end load versus an assumed distributedload. Classical beam analysis shows the end deflection dueto a distributed load to be 37.5% of the deflection due toan end load condition. When this factor is applied to thevalues predicted by the tests, the deflection range is 0.056m (0.18 ft) to 0.086 m (0.28 ft). This indicates that buck-ling will occur before any significant deflection takesplace due to cone bending.
5.1.2 Stern Structure
The stern structure houses the power train and the gim-bal mechanism which controls the airship flight stabilityand direction. It is composed of three sections as shownin Figures 5.3 and 5.4. They are designed to react bending,torque, and thrust loads into the envelope. All of theframework is constructed from 6061-T6 aluminum tubing with1.25 mm (0.049 in) wall. This alloy combines excellent weldproperties with good machinability. The design is basedupon an engineering stress analysis to show integrity of thestructure. The analysis was modeled after a similar efforton a tail mounted gimbaled propeller system using a unitload solution in combination with expected loading condi-tions1 9 . It is expected that the maximum load conditionwill result from gyroscopic moments and yaw forces on thepropeller.
The stern assembly is attached by lacing the battens tothe hull. This is a proven design but requires additionalrigging time during launch. No attachment should be made tothe terminetion ring since it is not a structural member butis included only to protect the envelope and maintain battenrigidity during launch.
1"Soudry, J. G., Structural Analysis Report, Silent JoeII Program, GER 14356, Goodyear Aerospace Corporation, Ad-ranted Research Projects Agency, Order No. 1255. 29 April1969.
70

BallonEeveop
1 tiquxe '5.30-- Stern Ctu onrs5dvi.
71ba-O

ALUM. TUBING3.4 Cm.OD X ,aCM. WALL
ALUM. TUBING2,Ucm,ODx. 2CM. WALL(Typ. All Brace Members)
Figure 5.4 Stern 111tructuree en~d view~
72

5.1.3 Gondola
The gondola houses the fuel cell with associated hard-ware and fuel tanks, the payload, the command telemetry sys-tem, control unit, and the autopilot. Pratt & Whitney de-rived the original design of the framework under a subsequentcontract with the spdnsor; and except for some changes inthe framework, the design shown in Figure 5.5 is essentiallyidentical to the original design2 . One of the primary pur-poses of the expendable membrane support is to protect thefuel cell, associated hardware, and payload upon terminationof the mission as discussed in Section 5.5. When the flightis terminated the entire gondola will be parachuted back toearth. Since high winds may be encountered upon descent,the impact vector may be as much as .79 rad (45 deg) caus-ing the gondola to roll after impact. Thus, the parachutewill be cut loose upon impact, preventing the gondola frombeing dragged. The landing shock of the gondola will beattenuated by the aluminum radiator panel, the crushablealuminum honeycomb base, the external frame, and the elasto-meric shear mounts.
The water storage bag will be fabricated from 1.7 N/1r2(5 oz/yd 2 ) urethane coated nylon fabric. This haq willstore approximately .205 m3 (45 gallons) of water which isto be discharged by the fuel cell.
The total weight is 5,007 N (1,126 lb) when the expend-able membrane support, housekeeping electronics, and para-chute are all accounted (See Section 5.1.4). The center ofgravity of the gondola is located 35.9 m (118 ft) from thenose of the balloon as shown in Figure 5.1. The C.G. ismaintained in the same position horizontally but shifts ap-proximately 0.18 m (7.1 in) down as the fuel is consumed.
The gondola is suspended beneath the balloon by a dis-tance equal to the height of the gondola in order to mini-mize drag and reduce the tension on the load lines. Thisresults in the suspension lines pulling at an angle of .93rad (53.5 deg) from the vertical as seen in Figure 5.6. Thetotal load in the suspension lines is 8675 N (1950 lb) andone-half of this load is transmitted into each side of the
iHiandey, L. M., Study of Fuel Cell System for PoweredBalloon, PWA-4792, Pratt & Whitney Aircraft. Air Force Cam-bridge Research Laboratories, AFCRL-TR-73-0447. September1973.
73

19 3 cm.I
I Fuel Tank2 Payload3 Housekeeping4 Ho Tank
502 Tank4 H2 0 Bag
Spport Frame
2.5 cm. Alum. Sq. Tubing
Z-\Roil Cage1. 58 cm. 0. 0. Alu m. Tu bin g
9Honeycomb BassHoneycomb Bumper
LINParachute BoxA Radiator ( Below Base)
Figure 5.5 Gondola.
74

I f~nll.oon A1in-
Load Paitc~h
Lcpad Line ~(''-l
Figure 5,6 Gondol~a stisennion, end view.
75

balloon. To prevent overstressing of the envelope underpressurized conditions the hull in this area is designed with203 pm (8 mil) instead of 152 pm (6 mil) material (See Figure5.3).
Three load patches on either side of the gondola, asshown in Figures 5.1, 5.6 and 5.7, are used to hold the gon-dola. The load patches would be constructed from a highstrength nylon fabric and would be adhered to the balloonskin using a liquid adhesive.* The patch would be of a cat-enary type construction with nylon webbing sewn along theparabola to distribute the load uniformly throughout thepatch. Load lines, which would be lightweight steel cables,would lead from a "V"t ring on the patch to an eyebolt on theedge of the platform.
Seven additional patches, two on each side and threedirectly over the gondola, will be used during the launchsequence. These are shown in Figure 5.6 and, are discussedfurther in Section 5.5.
5.1.4 Weight Summary and Distribution
TabJe 5.1 summarizes the system weightsi i.e., a break-down of the weights of major vehicle components along withweights of components contained within the structure. Thehorizontal position of the center of gravity is also present-ed. The center of gravity distances are measured from thenose of the airship. The airship center of buoyancy is lo-cated at 49.9 m (164 ft) from the nose. Vertical alignmentof the airship center of gravity to the center of buoyancydetermines the gondola location.
5.2 Propulsion Drive Train
The propulsion drive train consists of the motor, speedreducer, and propeller with the electrical energy being sup-plied by the fuel cell which is discussed in Section 5.5.1.The framework which houses the drive train was discussed inSection 5.1.2. The following is a summary of the drivetrain power allocations:
*Tests were performed to determine structural integrityof the patches. These tests are reported on in Appendix B.
76

[II ] SealSI /°°
nsiti.on Patch
(Typ. 4 Places) 'on4oli!I
Load Patch,(,."yp. 6 Places) /Launch Patch(t~(Tp. 3 Places
/
100
fi..
'•-, *I I ,I-.
*i'' I I :
.1 *
*II . . - [ .
* * ,-. ,- flt
V :
Lfn L~tnh Position
Fiqure 5.7 Patches for .,-nacia qusO,3nsiOfl.
77
/Vb i a ii Ii[b~ *-
U-

Item Weight* (N) C.G. (M)YBalloon
Fins 168.7 98.20Hull 12,039 8 50.92
Total Balloon 12, 208 5 5-•(2,744.7 lb) (169.20 ft)
Stern StructureMotor 34.3Converter 222.7Gimbal Motors 3.9Speed Reducer 68.7Structure 192.3Prop 196.2_ _
718.1 113.84(161.4 ib) (373.51 ft)
GondolaPayload 889.8Housekeeping Electronics 290.4Fuel Cell 636.1H2 Tank (Full) 685.002 Tank (Full) 1,650.2Water Bag (empty) 22.2Radiator 97.9Piping and Wiring 66.7Frame Structure 348.1Parachute Assembly 311.0
Total Gondola 5,007.4 35.9(1,125.8 lb) (11.7.8 ft)
Wire, Gondola to Motor 21.6.8 74.0(48.7 lb) (242.8 ft)
Total System Weight 18,150.8 49.9(4,080.7 lb) (163.6 ft)
*All weight calculations assume the acceleration due togravity to be 9.81 m/s 2 . This estimates the gravitationalforces to be 0.7% greater than actually experienced at floataltitude.
TABLE 5.1 SYSTEM WEIGHT SUý4MARY
78

Input Output i
Power Efficiency PowerMotor 1.- BT'W 75% 1.-=W .
Speed Reducer 1.35 kW 96% 1.30 kWPropeller 1.30 kW 78% 1.01 kW
5.2.1 Propulsion Motor
The propulsion motor preliminary design was furnishedby Lear Motors Corporation. Several motor vendors had beencontacted, and this particular design appeared to be most ad-vantageous. The prime factors in the selection of the pro-pulsion motor, in addition to the normal considerations ofpower, speed, etc., were efficiency, weight, and high alti-tude capability. It was felt that the high altitude capabil-ity could best be provided by a brushless DC motor. Mostbrushless motors consist of an electronic unit and a rota-ting machine. It is beneficial to have the mass of the ro-tating machine very small in order to provide flexibility inthe design of the gimbaled structure. The brushless conceptfits this need nicely by having an electronic converter unitwhich may be located remotely from the rotating machine ifdesired. Also, the motor is very light weight and small insize. A specific advantage of the Lear Reno motor is theability to start and stop the motor with a 0-5 VDC, TTL(transistor-transistor logic) compatible !c.jic signal. Thiseliminates the heavy contactors required to start and stopother types of propulsion motors. It should be noted thatthis featurn is available due to the use of transistors asswitches inL the electronic converter. A more powerful motorwould necessitate the use of SCR's (silicon controlled rec-tifiers), which are difficult to turn off, and thereby, re-quire external circuity involving power losses and weightpenalties.
The Lear design is not the DC to AC inverter driving anAC motor scheme used by many brushless motor manufacturers.Instead, a patented means of electronic commutation is em-ployed. The efficiency of the Lear motor and electronicswas the highest of all motors. The proposed design develops1.35 kW (1.81 lip) at a speed of 1050 rad/s (10,000 rpm).The current drain is 60 A steady state at 30 VDC and 72Awhile starting.* The start-up time of the motor under full
*The -design received from Lear Motors Corporation wasbased on 24 VDC operation. The value fDr current has beenadj'isted for 30 VDC operation.
79

load is estimated to be three minutes maximum. Size 00 cop-per wire is proposed to carry current from the fuel cell tothe motor. This wire has a weight of 5.9 N/m (0.404 lb/ft),and two wires are required. The efficiency of the motor, in-cluding its electronic converter, is 75%. The size of themotor is 12 cm dia x 12 cm (4.7 in dia x 4.7 in) and the
converter is 32 x 32 x 16 cm (13 x 13 x 6.3 in). The totalweight is 247 N (58 lb) and the heat sink requirements are
216 W at 5U0 C for the converter plus 245 W at 90 0 C for themotor. Figures 5.8 and 5.9 show physical characteristics ofthe motor and converter respectively. Performance charac-teristics are shown in Figure 5.10.
5.2.2 Speed Reducer
A speed reducer with a reduction ratio of 133:1 is re-quired to interface the 10,000 rpm motor with the 75 rpm pro-peller. Figures 5.11 and 5.12 illustrate the proposed belttype reducer. The Gates Rubber company was contacted fordesign information concerning sheave diameters, size of belts,belts per stage, and number of stages for optimum efficiency.The three stage reducer will have an operating life of 4000hours at 96% efficiency. Maximum allowable temperature forcontinuous operation is 820C. Physical size is estimated tobe 36 x 34 x 18 cm (14 x 13 x 7.1 in) and the weight is es-timated at 68.7 N (15.4 ib).
5.2.3
Sensenich Corporation provided the aerodynamic designof the propeller to be used on POBAL-S. The design wasbased upon requirements furnished by Raven plus the flow dis-tribution into the propeller disc area based upon tests per-formed on a tail powered airship model.15
The basic design details are as follows:
Number of blades 3Diameter 10.36 m (34.0 ft)Rotation speed 75 RPMThrust 119 N (26.8 lb)Efficiency 78%Volume of each blade 0.3613 m3 (12.76 ft 3 )Surface area of each
blade 7.273 m2 (78.29 ft 2 )
Figure 5.13 shows the propeller outline with sections.The graphs of Figure 5.14 show the distribution of surface
80

9. 1 cm. d1,,B. C.
58.253m. dca,Pilot
S~~~12 •00 Cm_---l "
C M. .31 Cm,
12.00cm,
F'igure 5.8 Motor configuration.
81

15.25cm.
I44
-30.50cm
Filtercap _____
CHOKE30 . 50cm.
1 PT1
Figurc 5.9 Converter conficruratiori.
82
.. ....

70 "O00
60 12.00 CURENT
S• "-"SPEED
5O a-I000
30 Goo20 0
0n i .3 ,6 .e 1,o 1,2 1.4 1.6
TORQUE (him)
!.l
44
i •i~u_-61U= .i "o.•.nerfo_--raance characteristics.
-83
t,,

MoorInu
'i t?
ItV I
4)0
r
Figure 5.11 Speed reducer.
84

I2 1. 5 m, o. D. 6.3 CM O.D.2414 rpm 244 rpm
0,000 rpm es
Inp u t,
SII
1 Polyflex Belts
S5SH-750lii
,A uput •
21.9 CM O.D*2.3c OD1,347 rpm
2 Beltg 3.96 cm O.D. 20.3 Cm O.D.1,347 rpm 75 rpm4 Belts 7 Belts
Fiq~ure S.12 Snead redUcer, section view
A 85

15% 30% 60%" 75 *%0% 100%
49.19#m4 4_MlE vieWREu
30%. 60% jLOifQE.Q 90% 100%
4RJE .% t - 4 -
90% 100%R
Figture 5.13 Propeller blade'shape.
86

2.
0IIIH 1.6
0\
"0 10 20 30 40 50 60 70 80 90 100
BLADE STATION(% OF RADIUS)
.20 .- ....
.18
v.14.
z .12 ... .. ... '. .
08-7
.... .........,..~... ......
0 6
S. 0 4
.04
• ' 0 10 20 30 40 50 60 70 80 90 0 •
BLADE STATION(% OF RADIUS) ,
Figure 5.14 Propeller blade perimeter and section areafor determination of blade surface area and volume. ,

I
area and volume elements of each propeller blade.
The fabrication design was derived at Raven Industriesand is based upon past experience using two and three bladedlight weight propellers. Because of the size of the propell-er required to efficiently propel the airship at these alti-tudes it is essential that extreme weight saving techniquesbe used. Consequently, the propeller will be constructedutilizing 6.4 mm thick x 6.4 mm cell (.24 in thick x .25in cell) Hexcell honeycomb of .018 mm (.0007 in) aluminumwith face sheets of .051 mm (.002 in) Mylar and .127 mm (.005in) aluminum as shown in Figure 5.15. Honeycomb designand construction is more detailed than other types of struc-ture, however, it represents the best choice when a highstiffness to weight ratio is required. Until the fabricationtechnique is actually tested, the weight of the propellercannot be accurately estimated, but based upon the recommend-ed construction the estimated weight is 196 N (44 lb).
•..'GWmm Th1cm 6.4mn. CeIl- i H Iel MoiieycOnib
Far# Shoets
Figure 5.15 Propeller blade construction.
5.2.4 Thermal Analysis
A simplified thermal analysis has been performed to de-termine if special precautions will be necessary in control-ling the operating temperature of the motor or speed reducer.The analysis accounted fur heat dissipation only through ra-diation. Consequently, the temperature estimates are higherthan would actually be experienced since convective and con-duction heat losses are ignored.
88
IJA

The motor, electronic converter, and speed reducer wereconsidered as a single unit mounted on a common heat sink.The maximum allowable operating temperatures are 90 0C forthe motor, 50 0C for the converter, and 82 0 C for the speedreducer. The radiating surface areas were estimated as 452cm2 (70 in 2 ), 3072 cm2 (476 in 2 ), and 3165 cm2 (491 in 2 ) re-spectively for a total of 6689 cm2 (1037 in 2 ).
The radiation impinging the unit is considered to be1390 W/m2 (129 W/ft 2 ) solar, 119 W/m2 (11 W/ft 2 ) albedo, and250 W/m2 (23 W/ft 2 ) terrestial. The absorption factor isestimated to be that of a white body, 0.22 for solar or al-bedo and 0.98 for terrestial. 2 1 The absorption area is con-sidered to be one half of the total radiating area for solarand albedo radiation which results in heat inputs of 102 Wsolar and 9 W albedo. The absorption area for terrestialradiation is estimated to be 1510 cm2 (234 in 2 ) which re-sults in 37 W terrestial input. The internal heat generatedby the motor (with converter), and speed reducer is estima-ted to be 500 W. Thus, the total heat input is 648 W. Us-ing an emittance of 0.92 for a white body at 500 C in theStefan-Boltzman equation, the total radiating surface arearequired is estimated to be 11,410 cm2 (1769 in 2 ) which isalmost twice the radiating area available.21
It appears that special precautions may need to be ta-ken to avoid overheating any of the power train components.Several solutions can be considered, such as, separating theconverter from the motor and speed reducer, shading the unitfrom solar radiation, using various coatings for thermal con-trol, increasing the radiation area, or any combination ofthe above alternatives. However, a more exact analysisshould be performed prior to incorporating any of these al-ternatives.
5.5 Flight Control System
The purpose of the flight control system is two-fold;it keeps the airship stable, and it permits remote controlof the flight course. Although lighter than air vehiclesmove slowly, they require some form of control to achievestable flight. The flight control system consists of a two-axis gimbal mechanism which is driven by an autopilot andassociated sensors. The propulsion motor is mounted on aplatform which is gimbaled to provide pitch and yaw devia-
"Van Vliet, Robert M., Passive Tomperature Control inthe Space Environment, MacMillan & Co., 1965.
89

tions. This structure is discussed in Section 5.4. Reversi-ble electric gimbal motors drive rotary-to-translational ac-tuators which are essentially independent of each other. Ablock diagram of the control system is shown in Figure 5.16.Each channel is a servo-system which reacts to an error sig-nal that represents the difference between a desired atti-tude and the actual attitude. Also, rate damping is provid-ed to prevent oscillations.
The estimated gimbal design characteristics are as fol-
lows:
Gimbal position range - ±0.785 rad (±45 deg)
Maximum gimbal rate - 0.0524 rad/s (3 deg/s)
Maximum acceleration - 0.00873 rad/s 2 (0.5 deg/s 2 )
Gimbal lever arm - 17.8 cm (7.01 in)
Gimbal friction torque - 2 Nm (1.47 ft-lb) @ 0.0524 rad/s I i
Gimbal static moment of inertia - 167 Nms 2 (123 ft/lb/sl)
Propeller gyroscopic torque on gimbal - 81.6 Nm (60.2ft-lb)
Gimbal position deadzone - 0.008 rad (0.458 deg)
Using these estimates, the preliminary design of the controlsystem was completed. In the final design and stabilityanalysis these values would be expected to change slightly.In the following sections each servo loop is examined ingreater detail.
5.3.1 Gimbal Mechanism
The gimbal mechanism of the control system contains themechanical components represented in Figures 5.16 and 5.17.Mechanical parts include the gimbal motor, actuator, andpositioh transducer. The yaw axis is formed by gimballiagthe propulsion assembly within the gimbal frame. A ball-screw operating between the frame and speed reducer housingprovides yaw control. The pitch axis is made independent bygimballing the frame within the support structure. Pitchcontrol is provided by a balJscrew operating between thesupport structure anid a lever attached to the pitch shaft.The key factors in this mechanism are reliability and mini-
90
. -_ ..

*HeadingAl +A +3Command Atao
Rat iiba
! ene rator Position -
FeedbackI
r ynamicNetwork
PITC AXIS
Pitche 5 +1 +lqtcnrlmstmbokdar
Trim AlA2 A31

Propais ion
0 imnba1 i~Motor ..I
Bali 'row Propoi11or-
-'Shaft
Gimbal
Figure 5.1.7 GiMbal meChanism.
92

mum weight.
The gimbal motor chosen is a DC, permanent magnet, highspeed motor with a reducing gearhead attached. The highspeed motor with gearhead has a low starging threshold, goodposition accuracy, and moderate starting torque. Figure 5.18is a representation pf the gimbal position loop includingthe servo amplifier. The transfer function for the mechani-cal portion of this loop was developed as: 22
0a.. (S K* T'7'-27 Z TSTl
"where:
LKgKLKL J s
!
TrTnK .s 2'-SI L"ns
2CT= KDL
~KsL
*0 angular displacement
n= efficiency of the ballscrew
G subscript denoting gimbal
J = moment of inertia
KD = damping coefficient due to kinetic friction
Kg = step down ratio of gearhead
Beemer, Jack D., et al., POBAL-S R & D Design Evalua-tion Report, Part II, Report No. 0673006, Raven Industries,Inc. Air Force Cambridge Research Laboratories, ContractNo. F-19628-73-C-0076. 6 July 1973.
93

KL - length of lever arm
Ks - twist of shaft
S - the Laplacian operator1, - lead of the ballacrew (linear motion per revolution)
m - subscript denoting motor
The total starting moment of inertia of the qimbal is:
JG - JI + JP
where J, is the moment of inertia required to overcome theinertia of the gimbaled mass and J is the moment of inertiarequired to balance the gyroscopicptorque forces caused bythe gimbaling of the spinning propeller. Friction is as- Asumed to be negligible at this point. The JI term is esti-mated to be 167 Nms 2 (123 ft/lb/s2 ), and 7 is calculated tobe 9347 Nv~s2 (6895 ft-lb-s2 ) which yields a valne of 5514NmsI (7018 ft-lb-s2 ) for JG"
Gimbal;Ho r Shaft Lever
AM*Gear Ball. Gimballed KasIlead Screw
8G~(CHO) .A fmCS L G gREO I I ?
Position e+V Transducer Step-Up
a .Gears-up
-V
Figure 5.18 Gimbal position loop.
94
. .! .. ... . ., .... ..... ---

The Ks factor represents a torsional displacement in the r
gearhead shaft and was computed to be 3.90 x 10-4 Nm/rad (251ft-lb/deg). The K parameter is a gimbal damping constantwhich is very difficult to predict. It is primarily dynamicfriction of the gimbal bearings and will be highly dependenton lubricant and temperature. By estimating the required gim-bal torque, T, to be 2 Nm (1.5 ft-lb) at an angular velocity,w, of 0.0524 rad/s (3.0 deg/s) KD is:
KD . T - 38.2 Nms (28.2 ft-lb-s)
The ballscrew selected is Saginaw Steering Gear type0500-0125-SGT. It has a lead of 3.11) mm/rev (0.124 in/rev) , a1.3 cm (0.5 in) diameter shaft, and must be at least 28 cm(11.0 in) long. At that length th~e ballscrew can withstand4450 N (1000 lb) compression load and travel at 25.4 cm/s (10in/s). The gimbal lever arm required is 17.8 cm (7.01 in)long, which means the travel rate would be approximately 0.93cm/s (0.37 in/s) to achieve 0.0524 rad/s (3.0 deg/s). Thisis well within the rated capabilities of the ballacrew. TheSGT series is a standard ground thread model which has a back-lash assumed to be tolerable. If deadzone is a problem inthe final design, there are other ballscrew models availablewith preloading to further reduce backlash.
The motor-gearhead combination selected is a Globe MotorsPart No. 54539-10 which has the following characteristics:
Input Voltage: 24 VDC
No Load Motor Speed: 942 rad/s (8,996 rpm)
Armature Inertia: 3.7 x 10-• Nin 2 (2.7xl0'-ft lb 52)
Input Current: 0.45 A
Output Shaft Size: 0.794 cm (0.313 in) dia. x 1.27 cm(0.50 in) long
Sizi: 3.175 cm (1.24 in) din. x 7.34 cm (2.89 in) long
Breakaway Voltage: 3.6 VDC
""Mass: 0.2 kg
Torque Ratio: 17
95

Speed Ratio: 27.94
Efficiency: 40%
Motor Torque: 0.00706 Nm (I oz-in)
The motor speed at rated load is approximately 640 rad/s(6400 rpm). The actual gimbal rate produced with this designis 0.0681 rad/s (3.9 deg/s) which is greater than the minimumrequirement 0.0524 rad/s (3.0 deg/s). The motor transferfunction was calculated to be:. 2
G(S) - 24.8 radSsV=" S( + 0.445 S) V
The most common feedback transducer used in servo loopsis a potentiometer. These are normally high quality linear
-devices which are available from many manufacturers. Thestep-up gears are used to drive the position feedback poten-tiometer in order to economically get maximum resolution.Typically, single turn units have 4.71 rad (270 deg) of rota-tion, and the gimbal owing is 0.785 rad (45 deg) or a total•of 1.57 rad (90 deg). Therefore# a step-up of 1:3 may be used.Referring to Figure 5.16 the feedback transducer output is torepresent 0.785 rad (45 deg) of gimbal movement. The maximumoutput is 1 15 VDC. The analog of gimbal linear displacement,6G, is:
S15v OG.7'§ sraa
where OG is the gimbal angular displacement.
The servo amp gain must be sufficient to drive the motorwhen the maximum permissible gimbal error occurs. Since themaximum permissible position deadzone (Ae.) is assumed to be0.008 rad (0.46 deg), and the breakaway voltage of the motoris 3.6 V# the approximate gain of the servo amplified (Ka)must be:
Ka - 3.6V
= 23.6
This gain is within the current "state-of-the-art" for exist-ing servo amplifiers.
96

The open loop transfer function for this preliminary de-sign can be summarized as:22
86(S) KaKm L(3)V K1C) Kg (2.351KL JL" .... KDL' (I+0.445
2.rKj•11Ks KSKL
where: K - 23.6
Km - 24.8 rad/s (1420 deg/s)V V
K5 - 3.90 x 10 Nm/rad (502 ft-l;/deg)
L - 5.05 x 10-4 m/rad (2.89 x 10-5 ft/deg)
V 15 V
Kg - 27.94KL 0.178 m (0.584 ft)
JG 9514 Nms 2 (7018 ft-lb-s 2 )
n - 0.9
KD - 38.2 Nms (28.2 ft-lb-s)
Several factors must be considered in the final designof the inner control loops in addition to any stability en-hancement features:
1. A means must be provided to limit electrical powerto the gimbal motor before the gimbal assembly reach-es its mechanical limit.
2. Mechanical couplings must be designed to minimizedeadzone and tests must be performed to determinethe minimum gimbal displacement necessary to startthe motor.
3. Circuits must be designed such that ground loops,oscillations, and hot spots are precluded.
97

5.3.2 Autopilot & Sensors
The autopilot contains the circuitry that provides thegains, filtering and dampening necessary to insure stableflight. The autopilot for this vehicle consists of a pitchand yaw channel, both completely independent of each other.
A block diagram of the autopilot is shown in Figure 5.19.The time constants and gains are determined by a stabilityanalysis of the complete control system (see Section 5.3.3).The block diagram indicates that both pitch and yaw channels.have similar computations. A sensor detects ac'-ual airshipattitude which is subtracted from a desired attitude to forman error signal, A. The error signal is used as a direct in-!put and as a derived rate signal by passing it through a highpass filter. The derived rate signal, 0, becomes a rate damp-I ing factor when it is subtracted from the attitude error sig-nal. The resultant is a gimbal command signal proportionalto the attitude error and damped in proportion to the rate ofchange of the attitude error. A limiter is added to preventthe gimbal mechanism from trying to move beyond its mechanical,or electrical limits, and beyond the safety limits of the air-ship .o••
During developmental testing the autopilot should havegain changing circuitry incorporated for varying autopilotparameters in-flight. It is anticipated that all forward cir-cuit gains, feedback gains, and lead/lag constants should beadjustable in 3 increments. Also, as shown in Figure 5.19,the airship may be flown manually by using radio command toapply the proper voltage directly to the gimbal motor. Thismanual control is intended only as a back-up function in caseof autopilot malfunction. Mechanical relays are shown in thediagram for simplicity, but solid state devices would mostlikely be used.
The autopilot unit may be mounted anywhere in the gondolabut the pitch sensor and heading sensor should be located withsome discretion. The pitch sencor should be mounted directlyunder# and as close as possible to, the longitudinal axis ofthe airship. This would minimize pitch errors due to possiblerolling motions of the airship. Likewise, the magnetometer(heading reference) should be located directly under the longi-tudinal axis and as high as practical in the gondola to mini-mize roll effects. Some testing will be required to determinethe effects of the gondola structure on the magnetometer ac-curacy.
98

12. VC
400 NZ IINVERTER
CLECTRO.Y rIC
SENSOR
PITCH GIMBAL
FROMMAND e
up N
PIT C HC C H A N N E LU
DOWN
to VOC
MAGNETOMETIFR A
HEADINGASIGNAL I
GENERATOR
OMMAND AUTO
jMANUAL YAWCOMMAND YAW CHANNEL ,FROM - v .....NAV UNIT RIGHT
WIgu9e 3,19 Autopilot block diagram..
99

5.3.2.1 Pitch Control. The pitch control serves to keepthe airship flying level as altitude is determined by theballoon buoyancy. If desired, the airship can be flown witha fixed pitch angle by applying a DC voltage offset to thepitch error input. The pitch sensor is chosen to be a gravi-ty sensing electrolytic transducer such as the type EPIO-750by Hamlin, Inc. It has a range of ±0.21 rad (12 deg) and ananalog of 20.1 VAC/rad (0.340 VAC/deg) for small angles, whenexcited with 12.5 VRMS at 400 Hz. The response time constantof this device is approximately 0.8 seconds; therefore, thetransfer function of the pitch sensor is:
VAC 20.1 VRMSS + 0.8S rad
The output must be rectified and filtered to interface withthe autopilot. A 12 ms low-pass filter will limit the peak-to-peak ripple to leas than 10% of the peak AC voltage. Theaverage of DC output voltage would be 0.95 times the peak ACvoltage or 1.34 times the RMS input voltage. This assumesan infinite load on the filter, which is not practical. How-ever, amplifiers are available with very high input impedances;therefore, a loss factor of 0.9 is assumed. The low passtransfer function then becomes:
VDC = 1.21
VAC 1 + 0.012s
5.3.2.2 Yaw Control. The yaw control loop is similar to thepitch except for the sensor and the heading command inputs.The heading sensor is assumed to be a magnetometer such asSchonstedt Instrument Company's UAM-53C-I. It has an outputanalog of 0.0210 Vm/A (1.67 V/oersted) and weighs 2.9 N (0.66ib). Its operating temperature range is +4.4 to +600 C; andit may require a heater and thermostat unless it can be loca-ted near 4 heat source. Since field intensity and flux den-sity are equal in a nonmagnetic medium, the output analog ofthe magnetometer is 1.67 x l0• V/T (1.67 V/gauss). The earthsmagnetic flux density decreases as the inverse cube of thedistance from the center of the earth. The earth radius is6378 km (3963 mi) so an additional 21 km (13 mi) would causea reduction in flux density of approximately one per cent.
The magnetometer is sensitive to the horizontal compon-
100
.7 .*

ent of magnetic flux which varies from 5 x 10-6 to 4 x 10-3T(0.05 to 0.4 gauss) over the surface of the earth. 2 3 Thisindicates that the gain of the heading sensor signal will haveto be selectable over a range of from one to eight in orderto fly anywhere in the world. A hypothetical example: thehorizontal component of flux density at Sioux Falls, SouthDakota is about 2 x 10-5 T (0.2 gauss). The output voltagewould range from zero to a maximum of 0.334 V. If the mag-netometer is mounted with the X-axis aligned with the longi-tudinal axis of the balloon, the voltage would be:
Vy= 0.334 sinýVy
where 4 is the magnetic heading. The frequency response is130 Hz at 0.5 gauss. The transfer function of the magneto-meter is:
Vy 0. 3344
A-- (5s + ') (1 + 0.00122S)
Since a sinusoid gives a decreasing voltage as 4 increasesbeyond 1.57 rad (90 degrees), the magnetometer output mustbe linearized by a heading signal generator circuit which isshown following the magnetometer (Figure 5.19). In the finaldesign, the heading signal generator circuit would combinethe signals from all three axes into a linearized signal.The transfer function of this source would likely be morecomplicated than the one above, but would be similar in form.This function would be combined with the remaining loop func-tions and used in the final stability analysis.
5.3.3 System Stability
If the airship is to perform properly in flight it mustfollow a stable flight path. This requires that the autopi-lot function so as to command the gimbal mechanism in a prop-er fashion. Because of the interface and mechanical compon-ents involved it is not only essential to check out the air-ship stability on the assumption that the autopilot is react-ing as anticipated; but it is also essential to determinethat the basic electronics are stable when under operation.Thus, system stability encompasses both airship performanceand electronics nperation.
"•Handbook of Geophysics and Space Environments, Shea L.Valley, ed., Air Force Cambridge Research Laboratories. 1965.
101

5.3.3.1 Autopilot Stability. The method normally used todetermine if the electronics circuitry of the autopilot isstable is to analyze the servo system with innermost loopand progress to the outer loop after the inner loops havebeen stabilized. The inner and outer loops are shown for theyaw channel in Figure 5.20. The innermost loop is actually agimbal position loop and will be analyzed first.
ACOMMANDA A MOTOR - M . l '
MICHAU MASUNIT .
'!Wl
M V:INAL "AA1PMTONtE
Figure 5.20 Heading controll yaw channel.
5.3.3.1.1 Gimbal Position Loop. This feedback loop is neces-iary to permit the gimbal motor to accurately hold the gim-baled mass in the desired position and to move it in a stablemanner.
Inserting values of the preliminary design into thetransfer function shown in Section 5.3.1 one obtains:
~5G -(23.6) (24.8) (1.02 x 10-1 (6.38) (3)7 (.00089§)z S2 + (2)(0.00236)(0.00058§)S+1:- (1+0.44'5S)
This loop is shown in Figure 5.21. The stability of the loopcan be determined by applying the frequency analysis methodto the open loop transfer function.
The above transfer function was analyzed by the computerprogram STABAN which is listed in Appendix 3.A Bode plot ofcomputer solution is shown in Figure 5.22. As shown, the in- <ner loop is stable with a gain margin of about 106 db and a
102

phase margin of approximately +66 deg; therefore, equaliza-tion is unnecessary, It should I-e noted that normal stabili-ty analysis methods ignore the 180 degree phase shift throughly represents an in-phase signal (360 degrees) and is thecritical point to examine.
Af MOTOR M1cAWIAL PORTION MAUSMOMP MOTO
MOTOR+ C .1 10419 - - - - - -C A 1_ j -ST.-F.EC1h5
C 0.00136
POTENTIOMETER GEARS
Figure 5.21 Gimbal position loop.
I..
is*e
I6MMpcy We Pb&
*Figure 5.22 Bode plot, gimbal position loop.
101~

The inner loop can be reduced to a single path by usingthe relationship:
GF = 1 + GH
In this case, G is the motor and gimbal mechanism, while H isthe feedback potentiometer and associated gears. (See Figure5.16). The forward loop transfer then becomes:
F = 0.0524(tIS' + 2ýlTlS+l) (T'S' + 2C2T2 S + 1)
where: T1 = 0.625
= 0.703
T2 = 5.88 x 10-4
ý2 = 0.00237
The gimbal motor position loop may be represented by asingle block containing this transfer function. This blockmay be used in further analysis of both the pitch and yawchannels.
5.3.3.1.2 Pitch & Yaw Control Loops. Combining the innerloop transfer function from the previous section and sensordetails from Section 5.3.2., gives the diagrams shown inFigure 5.23. The undefined gains and time constants shouldbe calculated when the aizship transfer function is knowq.The theoretical derivation of the airship transfer functioh,must be performed to fully complete this analysis but is im-practical without some empirical data from a scale model.The necessary values can then be calculated and the stabilitytested with the STABAN program. If the computer program in-dicated marginal stability, lead and/or lag filters shouldbe added along with gain adjustments, and stability retested.This process should be repeated until the phase margin andgain margin are acceptable.
The yaw loop is the same as pitch except for the headingcommand signal input. The time constants required will un-doubtedly be different thaa pitch due to differences in re-sponse to the airship. Only the y-axis transfer function isshown for the magnetometer but the x and z axes have similarfunctions. All three signals will be utilized by the headingsignal generator to convert Vy into a linear signal.
104

GIMBALLEDINNER GIMBAL LOOP MS
FROM - TS+2,si (s. -,'SI
GENERATOR
MAGNETOMETER
LEDN 0.3341F YAW
GENEATO S~'1"~I+OOOI2s)FUNCTION
GIM BALLEDMASS
INNER LOOP
TRIM -r ~,S )(g' I)
GENERATOR I1+44
_________1.21 O~OARHPI+O.I2S +0.8 -- TR NPER
RET LER GRAVITYSENSOR
Fiqure S.23 pitch (kmottota) and yaw (top) control loops.
*105

5.3.3.2 Airship Flight Stability. The aerodynamic charac-teristics of the airship with respect to stability in flight,are an important consideration since airships are naturallyunstable. The gimbaling of the thrust vector is used to holdthe airship on course and create "stable flight" character-istics. The autopilot governs the motions of the gimbalmechanism by a predefined gimbal position based upon headingand pitch error and error rate feedback signals. The mostmeaningful way to check the airship flight stability is tomodel the system with a computer and study its synthesizedreactions to various hypothetical situations. Such a tech-nique empolying a digital computer was used successfully forHigh Platform II.10 The discussion here will be limited tothe basic equations which were used and the results obtained.
The geometry used in the equation is shown in Figure5.24. The basic equations which are used are of the form:
Sum of Forces = (mass)(acceleration)F = mx ax
EFy ay
EFZ= mz az
Sum of Moment = (moment of inertia) (angular acceleration)
11yY= Iyy 0 .
Zfzz. Izz i.
Sum of forces in x direction equal mass times accelera-tion in x direction:
T COS(T-O)COS(T+a) -Da -DH Dv -(W-b)siny = Mxv
Sum of forces in y direction equals mass time accelera-tion in y direction:
- Sa -LV + T cos6 sin(T-8) = ryj (0)
Sum of forces in z direction equal mass time accelcra-tion in z direction:
- La - LH - T COST sin(S+c) + (W-B) cosy = -mzv #
106

SHS.i. tZ ---- f tiol°
Me
. Axis
• ' ' .CUflVIL*NEAR FLIGHT INV•TCA~i•JlPLANE
' NORTH
~Ans
:•,, X
AIRS3HI Thrust
"* DW Weight Of Airship
"B Buoyance Of GasC.B. = Center Of Buoyance
C.M. Center Of Mass
Q.C. a Quarter Chord
'D Drag
L. Lift
C.6,1C S = Side Force-
M = Moment About Y AxisN =N Moment About Z Axis
Velocity
A Length
at = Hull (Airship)
Lv H =H Horizontal Fin
/V =Vertical Fin/ t Tail
G = Gimbal
CURVILINEAR FLIGHT IN KIRIZONTALJ t', PL.ANE
Vicure. 5.. 24 Geometry and nomenclat.e used for airship
flight stability analysis.
-107
- :_. "' I, .• 4 • . .. . .
•p~ ... ••. • --•• •' • ;' 'L " •' -•. .• ' ' ,

imsSum of moments about y axis equal moment of inertiatmsangular acceleration about the y axis:
Ma+ M t -Lah sinac + Dah Cosat - LH (Xtcosct + h sina)
+- DH (h Cosa - Ltsinct) -T cosT(h cosS + kG siS
Bh-sinO =.I YG
Su fmments about z axis equal momenIt of inetitimes angular acceleration about thA,'z axis:.
-N,- +z(LCs+D ia:T..cssna tt V vLcs ~i~ ~ O~Sn Z'
Th ese equations are used -in conjunction wi 1Ah the basic'autopilot/gimbal performance. defined, with. the folloWingequation:
~ GpE(O-A) +GpR 0
andI
where G is the' autopilot. amp lif ter' gain', (P' denotes pitchj 'Ydeho%'-es yaw, t denotes angular error,, ar~d, R dnotte~s., angula~rrate')., A is the : it~pf'co-riectioA', -and B is'the haingcoor-,r'3ction -fa'ctor.'" When the I~ain dmn ht the gimbalýrespond outside, of rcit cacpabilif-ios' it i~s linltdte to'its..actual rate 'and limit stop dapabilities'.- Aisoj each of .
the, major tbrms "in the ae'rodynamic: eguMtIon needs to be exý-, .. 'K
panded upon in terms of aerodynamic derivaitions, and coeffi-cients depend~int upon angular displacements or velocities..The. result is that the equat~ons i~l their**more complex form.allow for the solving of ,4ý, y. 0# and ý if all other an-
A; gles, their time derivatives, and the velocity have knownvalues.
To start the simulationi calculation, initial. conditi.Qnsare assumed for theae other angles, time derivatives, andvelocity. The autopilot/gimbal system will react to thisinitial condition by its electromechanical response whichcan be calculated. By using short time intervals i+-.is validto assume that all accelerations are constant over 'each time iinterval. New values of each of~ the initial conditions canbe recalculated using equations in the forms:.3
108

V.,
00e + 00+6 1 (A)2
or
01 0G +- 00+01 (A)
where A denotes the time increment.
The procedure is repeated in an iterative manner to cal-culate values of 0, a, 61 p, 8, T, and v at discrete time in-tervals. The computer output then shows how the system ispredicted to respond to a specific situation defined by theinitial conditions. Examples of the syitem response are shownin Figure 5.25. The computer program, POSIM, and examples ofits output are listed in Appendix D.
5.3.4 Heading Control System
For station keeping demonstration purposes it has beendetermined that a fairly crude navigation technique used inconjunction with a heading control capability would be suffi-cient. Also, for the purposes of this effort, station keep-ing has been defined as remaining within 200 nautical milesof the ground command center. To accomplish this it is rec-ommended that course heading changes be made from the groundstation based upon flight vectors determined by radar posi-tioning. These heading changes would be made by the headingcontrol unit diagrammed in Figure 5.26.
The autopilot is designed to operate by actuating thegimbal to cause the airship to hold the heading programmed asa reference. The same magnetometer which is used for yawstability control is also used for heading control. The.ref-erence heading is derived from a tapped potentiometer drivenby a reversible stepping motor. The station operator cansteer the airship by sending only "turn left" or "turn right"commands to the stepping motor. The program heading can thenbe changed in increments of less than one degree and verifiedby telemetry.
The heading command output is a linear voltage whosemagnitude represents the deviation from north and whose polar-ity indicates the direction of deviation. The motor anddriver provide .031 rad (1.8 deg) increments. A gear typespeed reducer would reduce the step size to .016 rad (0.9deg). The power converter output is approximately 1 W and
109
I I I~i•'•''" •: ':" "'•;" •;•'=••".......................-..-....'............-...........................

2 D2 40 6 D so 1 120 140 160 IN
w-j
CD_ _ _ _ _ _ _ _ _ _
14
w
-2
__12__ Execute 150 Head Ing__Change
-14 _ _ _ ___
Figure 5.25 Two examples of airship performancefor lateral control.
110j

the efficiency of this type supply is typically about 65%.Input power requirements are approximately 15 W peak. Assum-ing the heading would seldom be changed, the average power is
r estimated to be 1.5 W. Weight of this unit is estimated tobe 5 N (1.1 ib).
SUPPLY +5VDC "
FROM SIGNAL DRIVERCCMMAN L STEPPER :UNIT STEPTO CIRCUITS MTPPR GEA
:1SIGNAL -fD•E
"HEADINGCCOMMAND
Figure 5.26 Heading control block diagram.
As seen from the above description, the heading controlis simple and somewhat crude by spacecraft standards. An thewinds may exceed twice the airspeed capability of the airship,and the area of station keeping made much smaller, it may bedesirable to design an on-board, station-keeping, navigationsystem at a later date for such applications. For the pres-ent, this system will allow evaluation of airship performanceand variations in the wind field at this altitude.
5.3.5 Command and Telemetry System
The command system for the early stages of this projectshall consist of a VHF, Narrow Band, FM radio link. Thetransmittor `Ls located at the ground control station and thereceiver is aboard the airship. A block diagram of the radiocommand unit is shown in Figure 5.27. This unit is composedof building blocks found within the Raven TRAC system. The
111

command system described herein hias been'in use by Raven in-dustries for balloon-borne applications since 1968 with anexcellent history and proven operation to the radio horizonas found in balloon applications..
-PTV AIMI P0l UI
PILOTO1/,Agppio
rim PILTP ITHMHaT
"WIN 1 = 1 MTCl cOKIROIK
11I UT - HEAIN SA CH N I
KC 6"LOVW41P POIUO G[AIN IAI OTLH[R AA~~
Figure~~~~~~VA 5.271 RaiGomadssembokNiqrI.W6"DLRTEGI
The~~~~HVI command require areO prGnediAIgue52.TprviE maxSiSmumrlaiiy h emnto omnshv~~'private~~~-P1C lineL (ton sqec)GneAIetfrmteN isi
command ~ ~ ~ ~ ~ ~ ~ PIC sqec. Ti omad se otains GAI bnayNecoder~~~ which allowL teI tGnsIsio ofI upto32coOadsbuiiigoly4 coman tones from theO grLOun station.T
verify~~~~~ coUTan recetion PIC comad eifcaio igaliavailabe to mdulatethe teemetrytransmttr. hs ie
the~~~~~~~~~AT ground staio oprtra uiotnpncM/UMade-cution.WC"RD
minium o comlexiy. Te esimatd poer cnsumtionis
Duinguthe 5i.27 fdightsmmandysprmters mustk beagrle-
Th comad reuie ar rsne-n.iue52.T
provde axium rliailiy, he trmiatin comans hveprvae in" toesqelh)inepndn fomt112rsi
commnd quelh. his ommnd sste conain a bnar de

metered for real time evaluation. This will allow the groundcrew to evaluate performance and make appropriate adjustments.Analog chart recordings are ideally suited for this applica-tion. The analog recordings, as opposed to digital, give ahistory of operation at a glance. This is ideal where sig-nals are continuously changing and real time evaluation isrequired.
An FM-FM telemetry system operating in the L or S bandis proposed. The components that make up a system such asthis are off-the-shelf items. The system can easily be tail-ored to suit system needs and meet IRIG (inter-range instru-mentation group) requirements.
The airborne electronics will consist of appropriatecommutators feeding IRIG + 7-1/2% proportional subcarrier os-cillators. The standard fRIG format will allow up to 11channels of data. (Due to possible ranging data interferenceand the limited data bandwidthp chamnels 1-10 have not beenconsidered.) These subcarriers than modulate an L or S bandtransmitter as required. The advantage of L or S band telem-etry over lower bands is the ability to utilize subcarrierchannels 20 and 21. Figure 5.28 is a block diagram showingthe on-board telemetry system. The telemetry unit will re-quire approximately 35 W of power including the transmitter.The estimated weight is 1ON (2.2 ib) including signal condi-tioning requirements and case. A space allowance of 15 x 15x 15 cm (5.9 x 5.9 x 5.9 in) should be made available forthe telemetry unit,.
5.4 Power Supply System
POBAL-S requires electrical power to operate the powertrain, gimbal mechanism, autopilot, on-board telemetry/com-mand system, housekeeping functions, payload, and internalelectrical functions. The power supply system to accomplishthis consists of the fuel cell, the interfacing control unit,and an emergency power supply to operate the telemetry/com-mand system.
5.4.1 Fuel Cell System
Design of the hydrogen-oxygen fuel cell system was furn-ished by Pratt & Whitney in conjunction with a concurrent con-tract. An output voltage of 30 V was selected early in theprogram to expedite the fuel cell design. The voltage choicewas based on three factors: 1) a similar system designed at30 V had previously been developed by Pratt & Whitney, 2)
113

NEAD~~u6 IRO
YAW GIONIAL POSGE
PAYLOAD TEMPAWtOPILOT IMAP -7S-FUJEL CELL WIMP -,I 41m.F UEL TEMP LIAIOo.;uEL TEMP ANL,MAY ELEC TEMP ý
PTROPCTUR TEMP
PROP MLTN TEMPMPilD RID TEMP
SKIN TEMP
FSUPEMR TIMP
FINl PINES
FIN MTA VOLTfr'147 NYull~qidloFUEL CELL VOLTFUEL CELL CURPENT-
AUTOPILOT GAIN
PROP SPEEDAC CE LEROME TERSALT ITUCEAIRSPEED
S PARE
1
PITCH ERRORHEADING REF I
fitADINMG IPITCH ANGLEHEADING REF WO1
HEADING 2
TORI
FLIgure 9.29 Telemetry system block dLagram,
114
. iii

voltages needed to be limited to prevent any arcing problemsduring operation at 21 km (70,000 ft), and 3) by using com-ponents from existing fuel cell designs the airship size wasminimized at a fuel cell voltage of approximately 30 V.
The fuel cell is to furnish 2.52 kW net terminal powerfor 7 days continuously. The characteristic curves are shownin Figure 5.29. The heat rejection rate of the fuel cell is1170 W which is accomplished with a radiator/coolant unitoperating at 93 C. The fuel cell can be started from itsown residual power in approximately 14 minutes and can with-stand a 100% overload for a short time without permanentdamage.
Basically, the fuel cell system components include thefuel cell (consisting of the cell stack, valves, coolant,pumps, condenser, heaters, piping, etc.), the liquid H, and02 in their respective storage tanks, the radiator, an& theH20 storage bag. Section 5.1.3 discusses how these compon-ents are contained within the gondola. The weight breakdowni is as fol~gws:
Fuel cell 636.1 N
S2 tank (empty 467.0
02 tank (empty) 244.6
H2 218.0
02 1405.6
H20 storage bag 22.2
Radiator 97.9
Piping and wiring 66.7
Total 3158.1 N (710 ib)
5.4.2 Power Distribution and Control System
Power from the fuel cell is allocated as follows:
Payload 500 WAutopilot, uilemetry, gimbal, etc. 220 WMotor 1000
Total 2520 W
115 1
i' '' • - ,, ' - -" ,

"-ý4aximum Voltage
X3.........-*- -
w esign Power(2.52 kW)
-3
2e
Minimumu Voltage
NET TERMINAL POWER(kW)
20 _____Total
2 oxygen
12,,-pesign Power(2.52 kW)
4 - .- - Hydrogen
C ~NET POWER (kW)I
Figure 5.29 Funl. cell characteristics. *
116

The control system provides the interface between theheavy duty power circuitry and sensitive electronic circuitryto provide proper power allocation. Referrinq to Figure 5.30system. All control functions are depicted as switches forCl~arity; however, solid state devices are desirable andshould be in corporated in most areas.
6-PAYLOAD POWER
I--- MYPLQAD CONTROL.
PIEL I-.FIN INPLATION MOTORMOTOR
~j5O
cci
IN MP tS (U M B A L
CURZf - TlLugNYOA
* MONITO
YIM TO TELEMETRY (DATA)
BATTERY JEAEI
&AND 4sCb1AND OUTPUTS
Figure 5.30 Power distribution and control systemblock diagram.
The payload-power was specified to be 500 W and furnish-ed by the fuel cell. A TTL-compatible logic signal is furn-ished to the payload which is assumed to contain a switchingdevice capable of controlling its 16.7 A current.
The voltage sensor and back-up power control shown per-forms an automatic switching function. This circuit connectsthe largest of the two voltages to the -telemetry, command, and
117

navigation systems. Therefore, if the fuel cell voltageshould drop below the battery voltage, indicating fuel cellfailure, the back-up battery will automatically supply therequired current. The voltage output of the fuel cell andcurrent drain of the back-up battery are continuously moni-tored and coupled to the telemetry to alert the ground sta-tion operator should the back-up battery come "on-line"By using small regulators at each load, instead of one largeregulator, improved filtering-of switching transients andnoise is achieved. By using sealed relays and solid statedevices the control unit need not be pressurized. The vol-ume of the control unit is 11 x 11 x 11 cm (4.3 x 4.3 x 4.3
Sin). The estimated total weight is 26 N (5.7 lb).
5.4.3 Emergency Power Supply
A back-up battery as shown in Figure 5.30 provides back-up power for the command, telemetry, heading control, andtermination devices. This power supply is to provide mini-mum tracking, control, and telemetry *or a 24 hour period incase of a propulsion system malfunction or a fuel cell fail-
a. ure. Should a failure occur, this can be extended to 48hours by commanding the telemetry transmitter on and off asrequired. The average current to operate the telemetry unit,command unit, and attitude sensors is estimated to be 1.55 A.
The battery must also furnish power to fire the squibsat flight termination, energize relays, energize transducers,etc. These short pulses will not occur at any predictablefrequency, nor at any particular time during the flight.In an attempt to insure that the required peak power is a-vailable for these intermittent loads, an additional 1 A ofcurrent was added to the battery requirement.
For high reliability it was decided to use a primarytype battery. Acceptable solutions for the primary batteryrequirements were received from only two sources. The pert-inent details are:
Vendor Yardney ChromalloyType Silver-Zinc Lithium-OrganicSize 29.2 x 19.7 x 17.8 cm 34.8 x 31.8 x 30.2 c;Weight 222 N 167 NHeater power 12.4 W 9 WShelf Line 1 month 1 year
Silver-zinc batteries are proven and offer the best re-liability. Lithium-organic production experience is not well
j 118
• • - • • .'....

established at this time, but it is expected to improve inthe future. The final battery choice should be made when acomplete control unit design is accomplished.
5.5 Launch and Recovery
The POBAL-S vehicle as described above is a complex bal-loon system. The launch and recovery operation will be adifficult task and eventually must be considered a major taskitem.
5.5.1 Launch
The recomiftended 'lauhch technique for this vehicle is a"tail first" vertical launch utilizing a tow balloon underwhich the airship will ascend tail first. The primary rea-sons for this type of launch are to prevent damage to thepropeller during lift-off and keep the heaviest weight con-centration (gondola) near the bottom of the balloon to pre-vent surging of helium during ascent. "A subtask of some fu-ture effort should be to demonstrate the launch concept un--der an experimental test.
The launch sequence is shown in rigure 5.31. The bal-loon should be laid out longitudinally with the stern struc-ture positioned over the aft end. Approximately 4.6 m (15ft) from -the tail end the balloon should be clamped off sothat only the tail will inflate to facilitate lacing thestern structure to the balloon. A crane would position andlift the stern structure as the inflation and lacing proceeds.The clamp would be released when lacing is completed.
The crane would have to raise the structure until thetow balloon is inflated and can support the airship tail.The tow balloon would have a buoyancy of approximately 1,480N (333 lb). As the crane is released from the stern struc-ture the tow balloon would hold the aft end of the airshiovertical while inflation of the airship continues.
At approximately 30.5 m (100 ft) from the tail a tri-roller will have been clamped to the airship hull. The tri-roller is attached to two winches that. will control the lift-off until the length of the airship is in the vertical posi-tion. In this manner, the gondola can be lifted slowly fromthe ground to a-void any snatch forces which would otherwisebe encountered. When the entire balloon is clear of theground and in the vertical position, the tri-roller clampwould be released.
119
S..~~............... I

I.N
1AI.LOOM
LI--lo LINEW
W4J COVER.
[10C1101 4 ?W-U
IN -RO RIA AL1 LP
4ki~
Figure 5.31 Lainnchi sequence.
120
. . . .. . . .. . . .. . .

ThU,, launch techniqtdere4uires two, ivflation valves. Avalve would be ldcatod, between thtirýtzvrn structure and.the'tie off". The purp~so, of thiO &valve is to infl.te the aftcone.for l.aoing of the battens tU the airsh~ip. As the craneis ileased and thi tow ballobn begins topiak up the tail of,the airiihp, a'second valve:which is located near the tri-roller~would -be opend. Thi -aie s used to fill •'bl.. on. tý its gross infiation. ,s used t f l ' ' "
The'airship..,Cross inflation would: be 22,000 N (.4,950.1b). This is the airship ,ross weight plus 20% free lift.The inflation gas is to'be helium. -The 20% free lift would...be counteracted by'18% or 3,290 N (740 ib) of ballast which Iwould leave 2% free lift in the system. The ballast and towballoon would be released by a pressure sensing switch. Therate of ballast release would be adjusted to assure that theairship eases into final pressurization.
A total of 10% free lift would be required to launchthis vehicle. Since the airship has 2% free lift remainingafter accounting for the ballast, the tow balloon would re-quire a buoyancy of 8% of the gross system weight or 1,480N (333 lb). Thus, the two balloon serves two purposes; itholds the stern structure and tail of the airship in thevertical position during the initial states of inflation andascent, and it provides the required free lift for ascent.
A level sensor would be attached to the stern structureas a safety device so that when the tow-line reaches a 700lean-over angle (from the vertical), a time delayed squiband cannon assembly would release the tow balloon. This isredundant to the pressure switch. Since the tow balloon isnot used to "ent gas to the airship, its buoyancy is retain-ed and it woald continue to rise and clear the propelleronce it is released. The airship will level out and easeinto its float altitude of 21 km (70,000 ft) as ballast isreleased.
Figure 5.32 shows the gondola and load patches goingthrough the complete ascent deployment sequence from thevertical to the horizontal position. In the initial stagesof launch, as the gondola is vertical, the three launchpatches directly over the gondola support the entire load.The load lines from these patches are secured on the planeof the center of gravity of the gondola. As the balloon be-gins to tip to the .79 rad (45 deg) position all seven ofthe launch patches, two on either side and three directlyabove the gondola, would share the weight of the gondola.
121,..... .~.---,-..

(AT FLOAT)
TRANSITION PATCH LAUNCH PATCH
LNPATCH
*O~f~OLA* POSITION
[~S CO. OF GONDOOLA
BALLOON1
(AT LAUNCH)
F'igure 5.32 Bon~4oa/load patch deployment sequence.
121

Then as, the b4lloon continues to tip into. its final horizon-,. tal -flight position the load is transferred from the launch
patches to'the six load patches,"threeon either side of thegondolaj ard:the launch patch lines become',slack.
"5S.52 Recovery
The POBAL-S-gondola contains expensive• equipment. theitemswithin the.,gon~dola can be' reused if aAethod of.re ov-.ery.is provided. Tho most-reliable and least expensive me-'.thod O acc mplishing,.'recovery is". ith: the use of 'a parachute.which wouldL be actuated upon,..release of, the qondola from theballoon. The jondola termination circuitry consists of, arelay, fuse, and timet delay., 'The termination would.be ac-complished by cutting the support lines with cutters contain-ing two .Dupont S-68','four grain squibs which are energizedindependently. By energizing the sec6nd stuib.,shortly afterthe first,,.the reliability'can be doubled.' The recommendedfiring current is.0.6 A for 4 ma for each squib,. It the se-cond squib pulse is delayed'for 4'ms,'the current requiredwould be 0.6 A for 8 ms per line cutter. Occasionally theterminals of the squibs will be shorted together by the de-tonation. Therefore, a fuse is used in the line to the pri-mary squibs such that if one should short it would not jeop-ardize the firing of the back-up squibs. In order to pre-vent static build-up an SPDT relay should be used for the ,'control interface so that the squib power lines are shortedtogether until actuated. I
The decelerator system selected must limit the shockforces experienced by the gondola at parachute opening andat ground impact to an acceptable value. The parachute se-lected for use in this application must posses an "effectivedrag area" of 264 m2 (2,840 ft 2 ) to provide a 6.1 m/s (20ft/s) impact velocity. A parachute of this size will weighapproximately 310 N (70 ib) and require a packing volume of0.059 M3 (2.1 ft4) .
The parachute utilized for this application must inflatereliably at the low dynamic pressure which would be exper-ienced at the parachute deployment altitude, and it must pro-vide stable descent. An unstable trajectory would resultin a less predictable and usually higher rate of descent.In addition, if the parachute is oscillating, the possibilityexists that the payload would not impact with the base in a"horizontal orientation. If the payload impacts the ground atan angle, the shock attenuation material on the base of thepackage is le efficient and impact loads are increased.
123

The existence of surface wind increases the importanceof using a stable, oscillation free recovery system. Surfacewinds impart a horizontal velocity to the descending gondolaland, if strong enough, these winds will cause the gondola totumble or roll after ground impact. Impact loads can betterbe controlled if the package can be maintained upright duringrecovery. Preliminary analysis shows that if the recoverableload impacts the ground with its base horizontal, the uprightorientation of the gondola can be maintained with winds up to10.5 m/s (20.4 kn). However, if the payload and parachuteare oscillating so that the base of the gondola impacts theground at an angle of .35 rad (20 deg), the payload may over-turn with winds above 5.1 m/s (10 kn).
Parachute designs such as the cross, disk-gap-band, andringslot all provide stable descent. These designs will main-tain an oscillation angle from the vertical of less than .17rad (10 deg).
The parachute should be folded and packed in the gondolawith the apex of the canopy to the top or open end. Para-chute packing and rigging is then completed by attaching oneone end of the lanyard (cord) to the apex of the canopy andthe other end of the lanyard to a support struoture in theairship. When recovery is initiated, the gondola and airshipseparate. As this separation occurs the lanyard would ex-tract and deploy the parachute. When the complete parachuteis deployed the lanyard would break, separating the gondolafrom the airship. The parachute is then free to inflate andsupport the vehicle to impact.
The length of the lanyard should be long enough to ex-tend approximately 3 m (10 ft) below the airship to avoidcanopy-with-airship contact during the deployment. Lanyardstrength should be approximately 890 N (200 lb). This issufficiently strong to insure extraction of the 310 N (70 lb)parachute without adding unnecessary weight to the airshipfor lanyard structural support.
The parachute can best be attached to the gondola usinga four-legged bridle with one leg of the bridle attached neareach corner of the gondola. This method of parachute attach-ment provides the most stable gondola orientation at groundimpact.
Upon impact with the ground, a line cutter will be acti- "1vated to cut the parachute from the gondola to preclude thepossibility of the gondola being dragged.
124

The stern structure is not designed for a parachute re-covery and will be returned with the airship. Since thereare no shock attenuators attached to the structure, nearlyas much damage would be imparted upon impact using a para-chute recovery as would be by remaining with the balloon. Theadditional design effort to salvage the stern assembly isnot warranted as the salvageable hardware is a small part ofthe system cost.
As the gondola is released from the airship a rip panelwould be opened. The rip cord used to open the panel would beattached to the top of the parachute. The cord would be longenough so that the parachute is fully deployed before thecord opens the panel. The rip panel would be located near thenose of the airship. As the gondola is released, the airshipwill tip nose up due to the weight of the stern structure as-sembly. This would allow the helium to vent rapidly as theairship descends with the stern assembly down.
125

6. SUMMARY AND CONCLUSIONS
The task reported on in this text primarily consisted ofa parametric analysis which resulted in a system concept de-finition for POBAL-S (a high altitude, superpressure airship)and the design of the airship. Also included was a brief.historical discussion of powered balloons applicable toPOBAL-S. The parametric analysis was presented in enough de-tail so that future extensions of the work performed herecould be readily accomplished. The design was presented inenough detail so that it was shown to be feasible to fabri-cate, launch, and operate the POBAL-S system.
The types of systems analyzed included propeller drivensuperpressure airships powered by a solar cell array, a fuelcell, a battery, a gas turbine engine, and internal combus-tion engines. For mission durations of less than one weekthere are definite cost and design advantages of using afuel cell powered vehicle. Combustion engine vehicles mayalso be applicable to the one week mission but a significantdevelopment effort to demonstrate feasibility would be re-quired. Also, because of fuel consumption the engine con-cept presents design complications. For mission durationsof two to three weeks the combustion engine should definitelybe considered and an effort should be expended in developingsuch a concept. The fuel cell concept may have cost advan-tages for these durations, as compared to the solar cell ar-ray powered airship, but it is doubtful that such a systemis feasible to launch because of its large size. For missionsof extended duration (longer than one month) the solar cellarray powered airship presents the only feasible alternative.However, in spite of its obviously high cost, such a vehiclecould be developed under a single effort and fulfill all mis-sion requirements. The primary disadvantage is that thesolar cells are not recoverable. The cost per flight ofthis vehicle is then highly dependent on solar cell costs.
The analysis section of this report discussed the sensi-tivity of the system design to all design parameters. Also,the parametric curves indicate the dependency of systemfeasibility on various parameters. These analyses indicatethat one of the major future efforts required leading to ve-hicle development is that of envelope material development.Other system design parameters such as film design stresslimit, maximum supertemperature, required free lift, coeffi-cient of drag, etc., must also be accurately determined. Tominimize design complications, system size, and system costsand to maximize reliability any future development efforts
126
.. . .-

should place great emphasis )h accurate determination ofthese parameters.
The chosen concept was for a vehicle capable of support-ing an 880 N (200 1b) payload requiring 500 W continuouspower at an altitude of 21 km (70,000 ft) for a 7 day dura-tion. The airship to meet this mission requirement is to befuel cell powered and operate at an 8.18 m/s (15.9 kn) air-speed. In the design it was assumed that a new biaxiallyoriented nylon film would be used as the envelope materiallhowever, at the present time this film is not a proven su-perpressure balloon material. Other new materials shouldalso be considered since conventional polyester film, eventhough it exhibits near minimum excursions in supertempera-ture extremes, does not have an acceptable strength-to-weight ratio.
*Appendix B reports test results of experimentation withbiaxially oriented Nylon 6.
127

REFERENCES
'Winker, J. A., High Altitude Relay Platform System, Re-port No. 0669011, Raven Industries, Inc. Final repor , Con-tract 4691, Task Order 18. 15 May 1969.
2Bourke, Edgan R.. II, "Addenum to Presentation on aUnique Approach to Balloon Station Keeping", Ratheon Company.Presented at Earth Observations from Balloons Symposium,American Society of Photogrammetry. Published by RaytheonCompany. 7 February 1969.
Nolan, George F., High Altitude Minimum Wind Fields andBalloon Applications, AFCRL 64-843, Air Force Cambridge Re-search Laboratories. 1964.
4Nolan, George F., A Study of Mesoscale Features of Sum-mertime Wind Fields in the Lower Stratosphere, AFCRL 67-0601.Air Force Cambridge Research Laboratories. 1967.
'Nolan, George F., "Meteorological Considerations forTethered'and Hovering Free Balloons, Air Force Cambridge Re-search Laboratories. Symposium Proceedings, Earth Observa-tions From Balloons, American Society of Photogramietry.February 1969.
6Beemer, Jack D., et al., POBAL-S R & D Design EvaluationReport, Part I, System Concept Choice, Report No. 0273001,Raven Industries, Inc., Air Force Cambridge Research Labora-tories Contract No. F19628-73-C-0076. 23 Februa-y 1973.
7Anderson, A. A., et al., Lighter-Than-Air Concepts Study,Report No. 1765, General Mills, Inc. Final Report, Contract1589(07). 1 September 1957. Revised, March 1960.
eVorachek, Jerome J., Investigation of Powered Lighter-Than-Air Vehicles, GER 14076, Goodyear Aerpspace Corporation.AFCRL-68-0626, Final Report, Air Force Cambridge ResearchLaboratories, Contract No. F19628-67-C-0047. 27 November 1968.
'High Altitude Powered Balloon Test Program, Report No.BB-2304, Goodyear Aerospace Corporation. November 1968.
l°Beemer, Jack D., et al., High Platform II, Report No.R-0870025, Raven Industries, Inc., nal Report, Contract4691, Task Order 22. 14 August 1970.
" 11 Beemer, J. D., et al., High Platform III Design Study,
128

REFERENCES
Report No. 0'871005,, Raven !ndustries, Inc., Final report, 'Cbntract 5831. 31 August 1971.
S2Vorachek# Jerome J., Edward W. McGraw, John W. Bezbatcheri-ko, Development of a Free Balioon Propulsion System,Goodje~ar-Ae-rospace Corporation. AFCRL TR-73-,0128r FinalIReport, Air Force Cambridge Research Laboratories,, ContractNo. 719628-72-C-0072. April 19-73.
""KeBeemer., Jack D., et al., Stud6 of High Altitude Station,Keing Ve hicles, Report No. 0373003,, Raven industries,, Inc.,
7Lnal Report,, ARPA Order No.. 1983. 15 March 1973.
14 Rueter, Loren L.,, "Drag Analysis for POBAL-S a HASKV'High~ Altitude Airships", informal paper, Raven Industries,Inc., 10 October 1972.
'5McLemore, Clyde H., Wind-Tunnel Tests of a 1/20-ScaleAirship Model with Stern Propellers,, NASA TN D-1026, Langley
arch~_____________ ritr ainlA--nl~lc n pc diita
tion. January 1962.
"1Roark, Raymond J., Formulas for Stress and Strain, Mc-Graw-Hill. 1965.
"Hoerner, Sighard F., Fluid-Dynamic Drag%. 1958.
"Bruhno E. F., xs and Design of Flight VehicleStructures, Kiý~ fset Co., Cincinnati. 1965.
"1Soudry, 3. G., Structural Analysis Report, Silent Joe I1Prarm GER 14356, Goodyear Aerospace corporation, Advancedfffsearh Projects Agency Order No. 1255. 29 April 1969.
2 0Handley, L.M., Study of Fuel Cell System for PoweredBalloon, PWA-4792, Pratt & Whitney Aircraft. Air Force Cam-
brige esearch Laboratories, AFCRL-TR-73-0447. September1973.
'1Van Vliet# Robert M., Passive Ternerature Control in theSpace Environment, MacMillan Co. 1965.
2Beerner, JaAi D., et al., POBAL-S R & D Design EvaluationRpr#Part Ilp Report No. 0673006, Raven Industries, Inc. 1
ArForce Camridge Research Laboratories, Contract No. F19628-73-C-0076. 6 July 1973.
129

REFERENCES
a'Hfandbook of Geophysics and Space Environments, Shea Livalley# ed., Air Force Cambridge Research Lai~ora oies. 1965.
130

B113LIOGRAPHY
Beemer, Jack Dp ', NPOBAL-S, SuperpressurePowered B~lloon", 'Raven Industriesi, Inc.* Prooetdirias9 (Supplemental. Volumo4,
E$1Ith AF~~~~CRL Scientific! Falloo ymoiz 3 Meber to3jbOctober 1974, A. Carton, Jr., eq.,, AFCRL-TR-74-0596,, AirForce Cambr dge Research Laboratories,'Mardh 1975.
Cartenj, Andrew S.,A Investigation of the Applicability. of.High Altitude Li ht-er-Than-A rTA ye a lem to te Tacti-,cal communincationsRelay Pro IeMo ACL-TR-74-09 ,AirForceCmridgo Research Laoratoriem. :20,August 1974.
Conley, William I., "High-Altitude.Tethered Balloon Design",Goodyear Aerospace Corporation.. Proceedings# AICRL Tethered
Balon Wrkshop# 1967, AFCRL-68-0097p Thomas W. Kelly# ad.,Ai-oc ab~g Research Laboratories. March 1968.
Doyle, George R.,. Jr., "Mathematical Model for the Ascent andDescent of a Hig'h-Altitude Tethered Balloon", Goodyear Aero-apace Corporation. Presented' at the Fifth APCRL ScientificBalloon Symposium. Abstract only published in ProceedingsFifth APCRL Scientific Balloon Syjmpsium AFC 8L069, MiisA.* Grass, ed.t Air orce Cambridge Research Laboratories.December 1968.
Free Balloon Propulsion Payload, GER-15488p Goodyear Aero-space Corporation. Air Force Cambridge Resea ~ch LaboratoriesRt & D Design Evaluation Report, Contract No. F19628-72-C-0072.
*1 14 January 1972.
Graham, John C., "A Survey of the Potential of Beamed Micro- Iwave Power for Balloons". Raytheon Company. p~sum ro-ceedinss, Earth Observations From Balloons, Amrcan goc ety
oPhotograinmetry. February 1969.
Hamilton, Robert C., Performance, Analysis and Selection ofBalloon Electrical Power Systemsp Research Paper P-4955 IALog. go. HQ68-93495, In75it b Defense Analysis. December1968. Also published in Proceedings, Fifth AFCRL ScientificBalo =oim Grass, Lewic A., ed., ArCRL-68-066 Air
cc CmbrdgeResearch Laboratories. December 1968.
Korn* Arthur 0., et al., LDF Powered Balloon Program, AWCRL-TR-73-0424, Air Force Cim5nbridge Res9earCh Laboratories. 18I
K~orn, A. 0. and Rt. Leclaire, "The Powered Balloon System", Air I:Force Cambridge Research Laboratories. Proceedings, Seventh
131

BIBLIOGRAPHY
AFCRL Scientific Balloon Symposium, George F. Nolan, ed., AirForce Cambridge Research Laboratories. September 1972.
Lally, Vincent E., Superpressure Balloons for HorizontalSoundings of the Atmosphere, NCAR-TN-28, National Center forAtmospheric Research. June 1967.
Mayer, Norman J., "The Influence of Fineness Ratio on PoweredEllipsoidal Balloon Weight and Other Characteristics", NASAHeadquarters. Proceedings, Eighth AFCRL Scientific BalloonSymposium, 30 September to 3 October 1974, Andrew S. Carten,Jr., ed.# AFCRL-TR-74-0393, Air Force Cambridge Research Lab-oratories. 21 August 1974.
Mayer, Norman J., "Advanced Airship Concept for Antenna Plat-form", NASA Headquarters. Proceedings, Seventh AFCRL Scien-tific Balloon Symposium, George F. Nolan, ed., Air Force CUam-bridge ReSearch Laboratories. September 1972.
Menke, James A., High-Altitude Tethered Balloon Systems Study,GER 13260, Goodyear Aerospace Corporation. Sponsored by Ad-vance Research Projects Agency. Monitored by Air Force Cam-bridge Research Laboratories, Contract F-19628-67-C-0145.10 May 1967.
Petrone, F. J and P. R. Wessel, "Regenerative Fuel Cell PowerSystem for Aerostats", Naval Ordnance Laboratory. Proceed-ings, Eighth AFCRL Scientific Balloon Symposilun, 30 septeberto 3 October 1974, A. Carten, Jr., ed., AYCRL-TR-74-0596, AirForce Cambridge Research Laboratories, March 1975.
Report on Hiah Altitude Airship (and Feasibility Model), Re-port No. 5490-2, General Mills, Inc. 30 June 1959.
Rice, Catherine B., Annotated Bibliography for ScientificBallooning, AFCRL-TR-0040, Air Force Cambridge Research Lab-oratories. 16 January 1974.
Rice, Catherine B., "Power Sources for Powered Balloons",Wentworth Institute. Presented at the Seventh AFCRL Scientif-ic Balloon Symposium. Proceedings, Seventh AFCRL ScientificBalloon Symposium, George F. Nolan, ed., Air Force CambridgeResearch Laboratories. September 1972.
Ross, R. S. "Advanced Balloon Systems as Photographic Plat.-forms, Goodyear Aerospace Corporation. Symposium Proceedings,
132

BIBLIOGRAPHY
Earth Observations from Balloons, American Society ofPhotogrammetry February 1969.
Ross, R. S., "A New Material Capability for the BalloonField", Goodyear Aer.space Corporation. Proceedin s 1.964AFCRL Scientific Balloon Symposium, AFCRL 65-486, Arthur O.• Korn, Jr., ed., Air Force Cambridge Research Laboratories.July 1965.
"RPVs - An Emerging Technology", Special Report, AviationWeek and Space Technology, Vol. 98, No. 4, 22 January T§73.
Vorachek, J. J. "A Comparison of Several Very High AltitudeStation Keeping Balloon Concepts", Goodyear Aerospace Cor-poration. Proceedings, Sixth AFCRL Scientific Balloon Sym-
osium, AFCff-70-0543, Lewis A. Grass, ed., Air Force Cam-bridge Research Laboratories. 27 October 1970.
Vorachek, Jerome J., "Concept for an Extremely High AltitudeTethered Balloon System", Goodyear Aerospace Corporation.Proceedings, Fifth AFCRL Scientific Balloon Symposium, AFCRL-68"0661, Lewis A. Grass, ed., Air Force Cambridge ResearchLaboratories. December 1968.
Ii
"1 133

APPENDIX A
VA-1

I L'
owe INI. d .
I. ; 3 It I
@. . N a. 9U..~ ~4 t 811 in 1W m~ I."4A
A"~I 0 4 a- U 9Wz, 9 l a ,,4gýT
%J-.,j 11b .40 CAW2 I-"w' 'A 14ac IIS %M 0 Z Z ~ L U 0 NSD.)C K t
at IL A0' Is 40 AOA 9- W~9N u A W a!9. ~9~~fu
'; a."J iJ 0. if, -on) .5. In .d~'~-* 4 inU C I- z 1 4 1 mK W419- 0. -W 3Z9 .
4. - 1OfU205PU - L 2 a- d 61bea 96 i I 1 1 It ': R99 E . x I x -W 1U9 - 4IC
:w 11 .*.. 1= II.. *&AA1 U .- It'aI-41id- C O 0.~ A *V9P- U*= # "I.- 116 mv 1.4 - .1; 4 v . .4 z ý .all o *. 9bKUUjiKQAWIi. S *4N 3 60 9-4NU p If -Wd W1 NK'" *K,
T14 Z EI&IN 19- " ... I9 " ~.. i .*. .I.. 22. X -
, :f4 x UZN 0 A J WoUN4 -' O'Z 1O 0 6. 0. ONU : o5 -4 ;V.- K J '4 4a L U I. ý% f0 tI'*U Z;.* N.~ i0 AD xU9 10:01nd1'iZI- I& Z 0K-! d4 IO.. .1V) 9-1 $;A0n' - ., ~inJ m4 4 ff.1~.. -CI -X 10
IUJ&.O.i 1 UW9-ýLK1a 1 N '-4 *!a 1 .N- 9 40 j MXKI.-0W
W .~l ~ J I N . ' Ul.x Aa.Z LQW 4 U M U IMý -KUvo 0.S I..~
19 1- n .oJAI,..W)- 0 t. T A- -A C4 N - =. 04 C3.-lat W
~~~cJtl 10. U% -# 'A beO- 2 A-I- UK. IL POW. 4 x I.-4P9-4f'A 4NI0WOIt W!'AWU00. A9iJ '4Izi ;
mitt I. - - ui I-IA V 2J -O -. In4 ~ 4 c"4L U.*z-h e 1; , ;,a ***Z , 1 .
IiU W . .I nO 9 1 4 b . " I 1a q Iz al a# z, -m4M
on -4-1: 1J ;I aZ 14, 1" 0 I=N -% -Kit Z UJI "It L 12.

46A
4110 0 31. I 4
I) a. be '
WU 1614 . A U.1 0: I
0 i4 &4'4,a Il" 4-u .
)I- 44% it l WW i e
U 4I C1 Q! I %U
IW, U .0B. 2 ge -6- tu t
I: - LUQ U z2;~~Z..I..O4 110 -;.1 $ K I E B.. Z- S.Oa .jh 1 .J4 0 .9 0I %UI c4~ -.. 3. *4
II...IUJ~3 'Q~* W LU -Lu 4L WI w ~ P O. ~ . 4UJ *U'~~4 .AJ.U404'M'C ; 21g 41 u U.J O * U . N
W2 a i,
M UOW&. 0~ qff at XW .49 Z~2 99I ILj U.xI J* NM t.. j? .4 , 0% -% I" 42-c Ci MO7M -4 4'
j ...' Q mII .4WI4 J..-4-.
.. *, .J~.I.-wI--. I I U IA* d4 I--., L4 4 aL ~ Z -I . j-I A 1
5 -n.ZI~~~~~.J~zty " " a.LJ.JWf-~*2 IW- ..N m . 2- gi-IQ. :PJJ.J AU xh. .. 4 11 1..~w& 0 FA4 t~~ deA Mb III
In N NI 1t 11 . t 4a I
IXL O D. O C I. WI-C 4w wz wk -j.4~ 44% 4I ~.XO..J .d NN-'n l toNN WmMM Ifm gftqWI *d.x 4 .- 0 r NIff 0-0 A& Au W$1
a 6umm U4 3-C X M L 4 CL M Q a L "- 0Z W I.WJ . IS13lce 9en de;
b-fl -4 I I" m

44
w
11Z 4I 4, II 0A1-1 i e
T uu J *.1 .
Ic .1 0.
19i I. . t 9 B
* Io Itdl . a I.'- -U X0
j 2~*' 3DI~~1 *. xUJ 1 i6~lE
24 *1 0I . ~ V .
1ýI aw wU
j 03. = z
- w .IN
490 .$A 2 'J.4 W 44 -wUa.Wl I Z4hd0 I, 1-- 1 'l ., -#a-a PO .. U w I U.W It 0 UviPJ
U..
~~...4I Lj LIzi~ EO IL ~* ,# II 4-#1 A~ ~ Iai'a I-i 1" "~ Z A2 NAI 4 1
dw u a0 0s; ON : U'PI -1 0 0 f 9. M1 r e.Ui~-. (3 1 L 3 4 - . 0I-&"1 ý L W4
odgjwo M f0 31 'fA 3104%d F-4 I'M4I 8-CC -4 %Lf1.,x 0. --aNWK x U I W 'A cc0W~% o0w 0~ - u)W 4 p
*3 a mo -~~2 z~L to I-4 AJ E' U.4O 4,49'-i i~U4 , I 4. IN'6.-K4-0Z XIc- I- r - 1N . ab-~
W C t 4 j S i z1 1.xv ole 41A 4 2 3D z ,~~it
* & o C U' @'g ' 12. 3 3' 1 A 31 * 'A -%Aw W VA r A
ip P'4O... 0..1 4 IN 0.P-r- 0 ' N.' in
A-4

101
Im to404
40.
r,0 w '.-
U,-
41 Au ~~A I
SU. ' z-j-
1
4 4
0- 0ýa
A-6~

ILU,
IL
A #
-. 49
Ii %A -4
go . i n I
_ j
Z I ., l
U, .i . #.1 tc I
-~ ~ .- 0 fC N0 to'
W1 , OW. 49 5 * * W
-W g-~ .4'W 1 4ýW4
I A- f" f"O ONd 0-0c
I-
#. 0~ .a0o616 .i.d i .4 W 14
'v-

W. Ow4IgI
i;;inrc A
I0 140.
#A. P Vl a 1 "
I.9 It
J N1E pi
01. 1 .0 4"':
2 l~ Ila
f~ 04I-
a,.. A -1,b
IA W 1I 06.
.1l. S - t -. uX4AUi w )- xw 1 d-
U.~~ 0UN N'iid ined 0 wW~~Z N--N fil RNjh. ~~
.eI I J -

¾Vol
vIi
a.!O I b4.'-
IVu
I.,4 I'l U. 4P. It Wo 71 11
VI0 O'l Mo tg# S. S. tS* 0NdQ 00IC-toI 4 V%0'2.. .
-m I w II 1- 44 - a o-L.44 U. U. J1 3SLU w ~ 14.I3
w~~ ~ ~ kiu v .1Lp!ju i
.I W. 3.- ~~~~~~t ry IV w . ~z S ~ U
~.W~9 bJ4A-1

if
1L.
A4
V.
-.cc
ALAUA
I A
1%ILI auWu. U, Ii 4UN Iw
in iJ U.kA~ U. a.in ~.I fl.. &AZ
N
is2- :I*j.- 1 4 " %
4 1 15E N 1 tIW 'K'if 7- LUN L FI4I N: f
.4I 1. & I4,1
06 1:-4 ',
"I gI 1IA TI
,a 2. I H. ,I4.12 1, 6 I Ul .JN 1% r -i --k 1 i

1:V
WV
r o t
uJjw
2 a
tv zx
-~~A K K O

en ~ I A'tS
a ~ ~ a a.- )40" 4p
0 Io
a,0 lol. -
I oft
14 f on If5.06 1. N. ~ -itPV
W% #A 130 ' -~U~dNN~ N
a 0 oN 0~ a e0000o101 . 'A
04 Z I N** ~44t0 J 0. 4 74
41- in4.
1000,0000 eO
o. d *%CocW~~O ON Il AWl
0 0 " U
15.1 0 0 0 P0'00 Wu aa40, UIs00 9000 Col MAAI
00 0 00 0 IWO
WI V~dC 0 .9- uwi
ff E.oW%0 1A4
atj 1-4 .11 166'nA~
4L a * 100 *qg C0 0
.4 .,jd 411a0*4 WN.j0 0 00000900 *.
0 4+.+ I+*~ +
N .& N 1
CIO, 0000 0.Q% 4O' a f.0Q & w U 1c
00004 0 f. 0 N
f" M 0I.-9
~ 0
*0.0-00- 0a
p-P- 0 0, a.-alCIS IEn00 0 -# 8.

(4.1
wN
81~88 1SHP43a a
* ? ~ mMR
8.4g o 0:d2 ~ ~ TI IT ~ -'I
Cý~ff 01 l 1
ci.4 .4.~40
11
1
wI 4 liu~u N. go e P. NN $4b
t. L; d P-.
0 001 01
J - 2Ify
*~UIII& 00 00 PO
I.- -f 6*.40 C3In g -a0p. P.C,:. - 1 a. I^f"
o~oco10 0 goo
C;U~ j, JWC;WW 0 0.
I IsWi a 0. 10I.. -A - . am +
I-O~M' .j e- - ~a *96 w tI1 NAm m .
P d I. N" r w w j IN .04"44 of Wr-I 'n 5%
19 a1Ia
0 IJ z .0 o .00 000.0
-OUN 8 0 Tal
aI 0 .0 +0
000 0~00~QA-t2

vii
9 a 31
C-d 14 8
y'WN UU kUi4W
a q 0.0% 0 aN9&aVO
0..
4939109 IP- : .4 0
61 1 olao 6 W.- o -NO
g; 0~ ~ (. NOirjr3.. a~ I& -C ~u 7N is1 1%~
O.J 2 0 'A0 #AV"A 2 0 : * t-
o m .4.4 Qd go
j J; § A- 0: qlý 9
ca W 3c .. w .ý d . pll.4 ..00-, a 0 at
0 z 0f 0 NN0 N94
UN~WW W r 0
V6 04S
QW4Q 4aWalWiWllI 0 0a4 NI.NxDe a ).0. 4p~0 v
z IA00 0 q910*o~0000:: 0 *1 9..9 *
rA f" eel 0
*J !¶4LJ. 0. *,.48i0.. 10 04- ,9XC 'A-1'..40 IL M W%
lo 6 3 1U0 C .P-4N W 8 M 2c 00 al,0.0 ~ ~ 0 p 4 I
0 0 0 0 0 0 I. 0 N9 -0 ib91 010 0 L to .4OA0 *0 .4 .8011
IN N
S- (2 0 4c r1
'I 1Awu UItuIQm4i-tt u 'L
a-C 4"-

ý04 0 0 0~ 0'
'Cr 0 10 0.000 0
@..00.4. 0 Q 0. uý *
00Z.00 a. .j o
0 0. P400x- J dt'
Ck~U Cý 0 .0I a d
L4 NU. IL P0s40~ 0, L06 j,ItA~~~~- . 9.0 y . I F.Di
00 0 0 N.
u2. IA 21 9 c codN4 0I
N 3C... 0 fi ty P.IA
0.4, CuzIf4i. wwwwwwJ
013= C 0P 0 P. " t I
.2. r r j -0 200M 3 C2 ) A 644 I.4000(1N f
.:~~(% -4 Q.00a00.9 CP.~0~
to NOm y00 00" 001 0 F
w~ + ~ OQI 'U ~ ~ L wW tydO'0 I 110
0 006'0 .Q0ýN
0. 0 0 000Ab 1 .2-, 040.
I" c.c ZX-.W j~I . 0 ONV 0 00 aNNal4'damN
SN 0 P.
L,)0. 0 ý0-- 4 Cc -10.0 c
Luo 0 o~ nI:
toU) a .& 0a ,0 0l I.1-ON%16
*0 Ca -P *9
ry ~ ~ 00 -. ,x Cwg
(: I tu t : '. 4w , Ia
0 cCr 0000004 .
-914-"Am 14¶]

L P4
cc 0 00af 0 00 1- 1L1. Il 20 " I0 cacao@~ w a
4n r-r C.I
4 aoOO-o m F6I% 4*6
0-00 2. . . 9.* * C; 9U. 0 00M0 f94t wN0
~ 00000 N(A4 a %M p
I~ 0 +00 + 14
'M ILc r1 :M1-, -w In *
0 . v 0 0O"'O N r 0
- D I'. w" N*
I Ui 6 IV U)~o1.% 7 (P j jDr4 r
C. & 0 C Q~r QI mI. L.~ c&KC 0 COýA47%- . 6~G~00 U
N C,uI0INjI. r4J 1~.I* 0
+ +. 694+
km C ' r- , aC.C-0 '
i. ~ 0 C.' lfiC 1" 0%
0 0 '40 LOn - f 0''
OCCOCOO U14
I-a i Fi XiCC Q lr f
LIL; NV*0l 0 a N w Aena
0I A-140 14 rI
CO0

is~i
~~IP
I~~ ~ ~ ".0 98 a .C -J1,M0 IF
C; ~ ~ ~ .f 4;C eJ 1a
IN O OwU% 40 0I0
c 0 00 V SW
A InW ws
M wt V i 04 Lf1111. lu r A 2 - ,aU ww
V% MK ~O U. J.; A U
!-U. N wal. *
.7 c?"UY -311.4 ~ ~ ~ ~ L omr. WI'fO~ iA flUl
a W sgCN a M ** =100 C.* ocP~s@ IA. t-4'NO. I @'n) -A! to"'--
S0 cc C
+*4 + + r 4I VU
%V ag19mo, 0 cal " ** 'aU P.- r0 0
N k O I IC M a'A . kLr I 11I wcO
o. - , Co~0' Ad s N ip -'S ww
0w9 J lU Iw 40 IP -''i S -- " imer~ -I-O AJ A. .T. 200~ C; co 0
41 A - 0 m m ^3 C N, 4. t. .ýo 4o
00 -'- CP Cu.~ N 0cc .4 :If onC It0N.ra
w 1 Ua IL UlA .4.. -; c.
0' 0~a Ja v 7 x u- Ii- ..
fr Aw-%jc010 .. u4L &AI I .17 ý .0f II A wQ 1mI j V .peU)4,j inA p o In Fc 1 In' N 1A 40 , w a

FMP
A4. 61-
In P.
to. I-i
~N Q
0" 0r4'
Id- -'ow
v ' 0.
PA N 'M* :: :sAcef~4U.
g~e.. *640
Ito~F
fy A I
sA. IL.
N * P"N .4
S.- lz a* 0* 44,*SWNa a
MtU
u,.c.4..* IIL-17

it I
1116111v 000 cc C;.* .:440
ft N ~ AA W gO
t10 J -a Z -aW4C0'0 Po. # 54 *A Bais AO; @ B.0414 W.E l di.. '
NI44 w ' .40
0 - C4 yPt.0 a .
A. .4 0- inO@O WN .4 gIallA 4 A 00 @p0 m.4 N:4,4 1-4 JN P
. @0 ono 0 Wi
0 cc Cl00.
141 in .144 riN .00 0 2
X~L 464MUa on 6%P..y@ IF 90940 & 1- 0$*.a w" I , -44 nUM .00 ~n 00 N4
-- : I. . .. .4 N. fv-
0. -0 - a - L 6O -4 O. n " Wn * . * . .
*D C IA 04m 00a,."Itna It, IA 0 noI14 6,0 . N
N 0' P-NLW CW ' ai It4 MOP- W-01 M N W.
ac a 0 0 Oa- 4L P.1WMW N #Aa1 09 'O &LU 090r.-I L
00 00 -0 4 4.C
P ~ ~ ~ ~ N OA0 04~NO C
CLat) 0 0 0 004w0 g4A J6 U.- 09 +N PI +I I- NN kf I- go-N l
4U Z UPS *.i . L0 0 43 0 000LR 904 00 00 NI.
*a 6 0" 00 0 9a - N.. so M It M 'cc ryvi0. 00 00 P 0
4 4 10 c 4 C.~ * 4 ..1.. g
J a. Wj j f 0N WJ OK, PJM A W% 04I rN 11
re~~~9 A .U4% oj4Of0 99 M. La UP 0: V:I 09: t 0-
00 I0 t U 4A .0 00 IO J N.ui4c 6 04 D
ON .4 0 Mo t* &A A 4p0%N.N00 00 00 0i -9
II UP III Zj A1 I - P4 0
U.-UW .4 AI 0- AP 0 m 0t 4 0U P 0 . U.
5?O1c 00 P AO 1 ,P 1
OP 0 0 0 C;2N? MP~+ P P IA U. N.E AO7 a- .rr
It W 9 * 'Al I -ta -
I- c0- ý N -0.~~~~~ Va -0 ' r

In 1cc 40
%AI .0 0.
~~I.QU~fd d d.0 W
rg~ ~ ~ M -0 n
ftg 46 p. Iey r @00 x
IsI
,A J4LFrN1 m -J,
Ir x z
e4 -W *%fjO
al~ ~ -w
5 AN 0VIAx 4. 0'
LA I P.- N' 'an c. a44 0 4ý f" **
tA4 4 *
p~q~ C2

- 2I,,
it
APPNMDIX B
St
II
4
IiiV
t
0'
I)
'4'
4 '� '3t' 2'
8-1
waikin.'M�&ncet&afl, task - 'I

MATERIAL TESTINGAbiaxially oriented nylon 6 film was chosen' as the candi•
date material from which the laminated film for hull construc-1
tion was to be fabricated.. This type of film was unproven
for balloon usel and consequepntly, testing of the film was re-,
quired. Also,.tests were required to demonstrate the struc-
tural integrity of patches and seal junctions used in the de-
sign. Thermoplastic adhesive tapes had previously been de-
veloped for this film and it was intended that a significant 1portion of the tests be conducted on seals and seal junctions
using these tapes. However, it was discovered that these
tapes did not have sufficient shear strength for the intend-
ed use. Twoadditional procurements of sealing tapes were
made, but after extensive testing the adhesive characteris-
tics could not be improved. Consequently, the efforts to per-form tests on the thermoplastic adhesive tapes were abandoned.
For the patch tests, a liquid adhesive, Adcote 102A, was suc-
cessfully used. Patches of the fan and parabolic design, as
shown on the following page, were tested both from a straight
pull and at an angle of 450. The fan patches were sealed to
laminate with a 1 inch wide seal around the enitire patch
whereas the parabolic patches utilize a "T" tape with the
base of the tape as the seal area. The results of these
tests are listed in the table below. Limitations of the test
B-2
...... . .. ..

201,
-FAN PATCHES
241__ 36"
16"
PARABOLIC PATCHES
B- 3

equippment prevented any of the patches from being tested to
ultimate srnth. .Hovever, the results obtained in most
cases are three to fou~r times the actual loading that the
patches would encounter in a launch or flight condition.
__________________________________ PATCH______ 'TESTS____ ____________________________
N4PATCH DESCRIPTION TYPE OF TEST TENSION-POUNDS 0 6S SE At V A TA 0 N S
4"FAN PATCH SEALED ON 3 PLY PATCH AND LAMINATE IN-TACT, NO TEARING OfVLON LAMINATE, 4 WEBS6INGS'.IN STRA191HT FULL 1600 WEUSINCS FROM PATCHI FABRIC, DISTRIBUTESýPATCH LOAD EV1N4Y. '
24" AN PTCHSEALD O 3 PY TP h~ i) PATCH TAKES MAJORITY OF LOAD5I NYV.ON LAMINATE, 4 WEIGINGS IN PULLED AT 450 1000 SLIGHT 'rEARI4 OF W983 FROM FABRIC AT,'D 4 4PATCH-RNATAHE.
24" FAN PATCH SEALED ON 3 PLY3 NYLON-LAJ4INATE. 4 WEBBINGS IN STRAIWhT PULL 1350 No SIGNS O~F PATCHI ORt LAMINATE FAILURE.PATCH
30"4 FAN PATCH SEALED ON 4 PLY4 NYLON LAMINATE,*5 WESSINGS IN STRAIGHT PULL 1000 PATCH AND LAMIINATE IN-TACT.PATCH
30" FAN PATCH SEALED ON 4 PLY5 NYLON LAMINATE, 5 WEBBING$ IN PULLED AT 4590 1250: PATCH AND LAMINATE IN-TACT.PATCH
ENDS OF PATCH CURL To CENTER DUE TO UNI-.6 24" PARABOLIC SEALED ON 3 PLY STRAIGHT PULL 1350 AXIAL TIST, LEG OF "T" TAPE STRETCHESNYLON LAMINATE APPAXt FROM BASE THROUGH MIDDLE 1/3_______________________ __________Of PATCH.
24"0 PARABOLIC SEALED ON 3 PLY. PULDA 5 20 REINFORCEMENT WEBBING ALONG SLOPE OF7 NYLON LAMI~NATE PLEAT4120 CURVE BEGINS TO TEAR FROM FABRIC AROUND_____________________ __________ATTACHMENT POINT.
- LEG OF "T" TAPE STRETCHING BASE THROUGH* 24" PARABOLIC SEALED OH 3 PLY- STRAIGHT PULL 1250 CENTER 1/3 OF PATCH -SLOPE OF CURVE NEEDSNYLO LAMNATETO BE INCREASED TO ALLEVIATE THIS.
3 5UPARBOLC EALD O 4 LY36" PARABOLIC HAS A GREATER SLOPE AND THUSNYLO LAMBOINSAT E D STAIH PUL P00 DISTRIBUTES LOAD INTO LAMINATE MORE EVENLY.NYLO LAINAE SRAIGT PLL 00 ESTTERMINATED AT 800 LBS. DUE TO MAL.-- _____________________ _________ _________FUNCTION OF EQUIPMENT.
10 36" PARABOLIC SEALED ON 4 PLY PULLED AT 450 60 WEBBING TEARS FROM FABRIC AT LOAD ATTACH-NYLON LAMINATE MENT - NEED HEAVIER FABRIC & WEBBING.
Both patch designs appear to distribute the load into the
laminate, on which it is sealed, quite uniformly considering
this was a uniaxial and not a biaxial test. The fan patch
exhibited higher loadings than the parabolic at the 450 pull
without any 4&ring of the fabric or webbing. in the patch.
B- 4

The tearing "oevyer, i ould. be alleviated by using heavier
90rio and webbing in the patch design
Earlier ultraviolet radiation exposure tests -had shown -that
the biaxially oriented nylpr~i,6 f ilm exhibits much lets' degra-
dation in strength and ductility akfter exposure-than doels
ýComp~arable polyester film. Sape eeeposed nea
GE. H12.T3,, 750 W UV lamp At a nominal distance of 14. inches
from the lamp. U~posure times of 9 hours and-16 hours were
uqq4' Tensile strengths 4nd ultimate elonigations were deter-
mined. grom strip, tensile tests, performed: at, -600C~with in
*init~i 1 j awi distance of 2 !;inches and a deparatiqrA rate of 2
J.;.ncheO/ninute. The results arpas follows: -
ULTRAVIOLET DEGRADATION TESTS,
Tensile StrEn th,('X) Elonqat~.on )
!4Mterial Orieo!! After exposure of 'Afer~exposure oftatioh
0O1ir 9 hr 1.6 hr 0 hr 9 hr 16 hr
1 ail nylon 6 TO) 41.2 33.1 7.3 36.8 21.0 0
asteril l~ TD) 30.6 18.9 6.3 29.5 31 0
1 mil nylon 6 MD 42.1 32.5 --- 35.8 14.3 -
Jgxk mil poly-enter MD 36.8 14.3 -- 31.0 1.9 --
B- 5

Tests have consistently shown the nylon film to be superior;
but as the table shown after enough exposure the nylon, like
the polyester, will degrade to an unusable state.
Water absorption by the nylon film can be an important factor
to consider. Tests have been performed to determine the
changes in weight, tenhile strength, and ultimate elongation
of the film -s affected by relative humidity. Samples were
stored at room temperature at 0, 50, and 100% rel.ative humid-
ities and were tested after .7. days and 30 days. Most of the
change occurred after 7 days, but additional change can be
detected after 30 days. The 30 day results are summarized
below. For the tensile tests the jaw distance was 3 inches
with separation rates of 2.0, 0.5, and 0.2 inch/min corres-
ponding to testing temperatures of 21, -25, and -700C.
EFFECTS OF WATER ABSORPTION TESTS
0% RH 50% RH 3.00, RH
Thickness, rm 25.1 26.1 26.0Weight, g/m2 29.1 31.9 32.0Specific gravity (calculated) 1.16 1.22 1.23
M.D. Tensile Strengths, lb, @:21'C 31.0 29.1 27.1-251C 29.6 29.4 30.5-701C 34.6 34.5 37.3
T.D. Tensile Strengths, lb, @:211C 34.0 32.0 30.3
-25°C 33.6 31.4 32.9-70°C 38.2 36.2 35.4
(cont.) ,
B-6

EFFECTS OF WATER ABSORPTION TESTS (cont.)
0% RH 50% RH 100% RH
M.D. Elongation, %, @:21 0 C 68 69 74
-25 0 C 48 47 58-70 0 C 42 41 46
T.D. Elongation, %, @:210C 72 68 73
-25 0 C 50 48 57-700C 47 39 34 ,
A variety of stress/strain tests were performed using the 25
im film. During this testing it became obvious that the ny-
lon film exhibited unstable creep characteristics. Further,
it was determined that the creep characteristics were very
difficult to predict as a result of variations in the film
properties and because of the sensitivity of these character-
istics to temperature. There were significant differences
between identical tests and anomalies between similar tests
performed at different temperatures. The following table
summarizes the nominal results obtained from the biaxia.l
creep tests.
•'B
B-7

BIAXIAL CREEP TESTS
L ~Elongation(%
stress .Tezup8 rature Initial After 4 Hours3/n~ C Value of Creep
I12,000 -70 3 4.14-#000 -.701.4,000 -33- 4 5
8; 8Ov 3 -25. 2 41.0-i00 .-25 5 714dO0 2 --- 20
8060 '-10 5 251000-10 2 . 9
7000,' .0 8 7251',0:00 21 7 12
The uniaxial dead load tests also showed creep instabilities
which are difficult to predict. The following lists are some
typical examples.;
UI4IAXIAL D)EAD LOAD CREEP TESTS
'. Stress Temperature Elongation(%
(l b/in2) (0C) af~ter test times of
_____0 ____ hr 3 hr 24 hr 51lhr 96 hr 168 hr
10,000 21 10 i5 18 25 --
14,000 21 18 22 27 33 -- 3514,000 -33 3 --- --- --- 10 -
21,000 -33 7 --- -- 17
Except for the creep instability, the biaxially oriented ny-
lon 6 film would function as a good superpressure balloon
material. All other characteristics including handling, pin-
holing, permeability, spectral transmittance and reflectahce,
etc., are excellentl and this film should be analyzed further
for possible use as a fiber reinforced gas barrier.
B- 8

APPENDIX C
c-• t C-1
.... ...

COPY. ctvcdafebj to DDC does rutperi~t .ifuly legible reprojduction
0eL
4e41 a.u
)L.. 1,. .~ . I -I
0 9
ie4N1 + N .4
CI- i i i . 11 J%.
t/+I in- in *0
LU -IN In,- N 11 X -I-. 111( *U(2
I U .1 *l I_. + U
W -4 > 2 -
Zit .j 0 1,*T :
U.e N N - 4- Fp. -11 . ; a'-J ~ ~ ~ L - UI-I %f NN LN. LUC) U. Il N1 XIl I in't-. 11+ -*,4 Q,-ý_ , - I- X'J3 N 4 -[
1-A-N'~ X is1 ~
M.A, y *1;3 'U.U Co4 ~ ~ ) U* .71 11 V.) (A k..J *U-JN , it) -i.. U ujt-Nu'~ ~ ~ c+ A~ 4 n.
- ~ ~ ý I-: LL1 ý ?- .2 + +'- '- . I..).) L 0:~ l ., A ~ N0 f L.) -* _: : 4,o 0- , =--~~.4,'4~ U.~ -A x-L I , i 2'*j.i* ". .1 -j *.4 I, -. , )'-IJLi.1--m W7 -l ..- -
ILL "A- 0 Q , II 0tC3, M. ) N I L: L) a
C) 0 i x, , ,"11 - L 1,
-.*I I-N4. U *C.4 'NJ N c NNNm j Q2N ' L
I. I f2

toycyallablo to DDG dop riotpern~t fully legible reproductionk
Z
LuL
.5.4
Ln (
NV Y
L 3
0 j04rM lZ
cf. j r)ri I 1 17
-1 t N -' t Ya.'
Si CL .-
at))
~I j I ;Ij A Jun I I
It,t: 0 :J. I. ii -, M1 -at
'It x, ,.N i
:. Iý 2 I -ta
r, Ili I- L) -...c -) J41 Ja .( en. l.4..3 h
i.1 ILI W t-i r a ~ .a A
It *Z -i i ' i i
*i-qv .0 CI..i< -
,I.0cJrttI ijti.flN *n 0) ijt-I)r)C0 P. 4l I-Ai.-L 'cn q 7,. NA 01 In to inn in0(% C

C avocue1 tO DDJC doen niopumjt fullY lsgiblo roproduction
p I
g Nt
"c I. r e. C
to' 14 1,
1::, V. 73 M .VI L.* .. .. .
ti11 *f wW * I '~ II 1,4 III T111 t't 411 II1,11 11
I If
I u N !.1 44 I II FI
u 11.':11 ,~ &A- V, l i i.A . l ji t ,1VVV .1 0
t It
be~C 44. .. .....J

4AUitt-W
It *. 0 aX f44 a .
14 U.~-~ ul #4 31j
z W0 a Q'W K W; it. £UAlo: 6- . f" ESS z 16 LU11zI-
~~I. j. In~ I
:1. lo. IL lAit U t tu tj if 1 .cx3
IC : K.. M I f4 t
w 1Ai 49I -IO ~It! 0. 'j j~ .0Ž-. Lat .
a 4. C3 UC TI A U 0 0 09w
u 0 1,- a . o zo ts 10 we14-.Jog W] 41c, 2W g '. 1
24 ..gIR I;, :J(
0- 0 -u 0t LbJu 04-' op. 0K "'01
I", *.i.J 1 0 wIe tj *LOPaC * 1 01 w 0 P
.~~4 coC I .4 tilt 191 00 8 4 0U CII-~1.- 1*-4 114,JM q~ "1 -9 1..Z * 1`4 49 0
U 6. L * u o *-Lc f4J.N* * ** 0J, J,:; 2,-4 W;O 6A In. :1 .6 N O J*fa 0 ***I' a'2 =
.9 -W.0 -W ' *NflL..bZ* 4 1-9 U, t Zb x p 01, --WA4
- , .. at -1'W 1,- % W 4 w 4 Z W LU. 0 ýII 0 W It "0 10 I 0 10 USW-4 -
-W N 1- -6 -. %to.w -wa 0 - *-". w.L
0 C"
* 41

APPEIfDIX D
D-1.

IJ,
oI A 4.
.4 #AA-4 iA Q~. !I : IAN ~~.-I'us I¼~.- 3
iI UA 0"q' 0.J- Ij IL ~ W1 (a ul ac
'A *.NZi. 1 .4 0, '1W ..4 .% 4 " .4M L AML.P t-.-J *c N - u
0 1;Ij U. j 14.0 1 e'
UI -X V44I-n% awt L0 j -- 4 - !7.A
u s E w"E . IN 01.110& )jI-AjCIL*#-L0IA W.4 w 41. oU,6.. z4 A *IAN lin
44 4 000 wJ0 1;1 1. J . 4ALoll. dt c f" 0 CD . @Lno W,-4 00 .NW
49 - .4 ps- 1 U i 0 .01 M*dc P- W4~
4 at4 04 -im a IN j
%4 WZ 0 4c xI Xý 4 4
z Nt 4 c INU j UUU --d 2 5
U,~~ 4t C3 .4.4 0d44.. wN N NN . N6

0 w
-I -m Mu we140 L
ha b- .-2i qx -9W aA.o R t 5A
tj z~N.400 0 Do MUSLJ a wbe w. 4- N IC3 .VI %A b, ý-.LU 01 4 W 4, 9 - 49 di 9L 4 Ww jýa-j ag I.-No I- - J rd
1. -9 IA-34
I- N N f 10 4 1-
*iOta
#a F 0 . Mf s . 0j3 ý .a0a.I- 4* I"i1.1 l60 n W A 10 0 %D 00 041 -f - w,*. p - od

1..J
4;1
of.0
ICA
L4 Ili '
*I t 1 u U.
C9 w ONI.-w
ad ; 0 t
0 '~ cc1* I .4-1
0- J J
t D-4

fQ~~1 3-'.4A4j1a~ b W
V11 .C
I.,I I- I Is,~ O . 4~. Lf *g fol z4fj.J , w
4Dj 1A~ idl *' k4, CJ IkA'.4 ; -U ' - P.;) 'UAI
w* WA Wt W
Z0l0 1 I'. .4 4--IA DIP- P-
LU - 4- aI 4 J I.4-4f
fibc IA
-' 4.50,-
"-4N N' rIA *; A 9 ' N
-0 cb x .0 t~d r D-5

in
I~ w1
'd n , -. I.
.4 A
U. 2. %A
L4 CA . Q 4
-b , Z.-
04 PW 9
b- I. ova u 4 4 4Ij 04 1
I It~~4 -1 iA:p -~-I'. We r.;Au
-50 - cis 0-4 4 w VI
W. at .1 t0 641 J dc4 4 L42r - 9 I 'a~. 04 I
8!KiNO j T- ILA t --5 * 41
-0 00 100 1'A't.% . 4
* I. * a Ia0 - I
cd *Nr!~ A 0;.I W p .
!% 0W4~ I x of 1t.Lu
'A~ U.4LiUL -9 II -J0.z U.-Z
I3X ,1 j m . 6 JJj- 1 a
304
N Y 44tYM to (A e.N

S.1 A1- k
4 ~ ~ a I-iO
U.1 - 0 4ft'j If ~L
Z 0 : 4 N +9 ~~~~~-.1M t000
N9 1- z I t o0
w 2 14 N
~j -, ~ 1.1~ jIW te
Z~I 44 Iti W
1.- 7 1 4-4 .0
4 4 x~ ic
~h tU 0 - OOD-7

p-0. -P. NFNEU P. 0.. N'I OF- P:~ P:.~ 4ý %01 P; PC1 .
0~~~~~ '4D -d - cy r- a' N' a' 0' 000 0a 'a ' 0 0 00 ." -#. N(ýo~ INNom
To 41 *6 i;4 p. m' w in ;* 0 a P.,' 30q 4 P n 0 P.- 4.'d VA N o. a o 0.AN oq1 A N.r 1 '
a' F- 14 I m -~%a a tU -N 14, 41 -4 00 49 1w, 'C I- 1z NAI 0 F- 00 a' U% A44-U C0
M 4) N , 0-P F- 10 v 4 M- - 0- - 'Fý' 0 0 0 0 0 ~ 0 0 N 'I U' 0 - N N UN a.Im 040.I- 0 U,4~I'.tC . F- At w 40 A 0' w 44 00 N' NO F A' N
0 ao ew 01 ~~~~a 1SS SAA A ** Q 1A M S M z S 1 - A 'A a5 = 0 pI*4a N0'P.'00 P. 0 aA.0 A U In U' -fIf4Q4NIt INNa I 00.0 0 ' 0.100 OF.FF
' c ' N N y - 4 -A F- U' 14 0 lfl4 U' 0 000I 'U IIa -U 'A.0 4-. 04O
a ..4 In. 4.. N m- 0 0 f4 . .001 4 - F-A cr a0 Igo N4 ev a'U
:A 1 'o A o~ P* -n *t** * 'f A A4 A 'm P. 15 P p p
cc F- P''.0 C.-N 0 oix P- 'I' N 0. 4m0- f t0 04 N A'~. N Mt P- 10 N 0' a4 p- t. a all a,0 -4IV .. 'N 0-FM-0N N 'Ucv 0.I40 0 a0 0tjC- '0 14 0 N 001 -1 %
Q 0 c. Q.0 0 F--- .0'CUU'AA 000NN..0000007000000000000-F
At r 01-. 0 MAt '0%0 C w f- N .J 0 F0 'o & 0 "t 0 M 0m NO ml- W1 F- 0 0 0 4, .0 M' Ai 4 -04
0NNr 4,*A 0 441) M -In N N V . 0 0 00 0 . 41-4 -4 ý4-4-
0o Zoo a. 0 J3 3 0 0 :0)00~00 00 .0 0 0 0 0D 0 0 00o 0 0,
-' l o~ p'A - a4 0 N1' m4 44 ON 144 F- . .- . . .' . f-4U '' NO 0 0 UN a' t- a' m040 Q'% z '
0u 0'. LI' '0 - 4- N! ~ N- NlNFN NO N NOF M0 'IN U' MOC '.At "N-d F- UIt 10 3 n'-.-44 0 0021a00 a0 a; 5'
.0 .. ....... ........ V -4a0 . .0n' I N *A oIn'A** V0NJr'oc
Mii 1 -A "I It -t It A 'Ar A0P
9l NO 9a 91 t0 ' 1 0- 100- 3N' N-a1U 0 F-'00 'F A-4-
4 -8

r- P- P- to WIO O N on In% t.O N If.- m. Ny 49 - 01
4- '1' 0 *1-4 4 U lo N4 w f
LU P.P. f-F.P.U N.
F- : :1 r- F- .- N- F- P. F- I. N- N - F- F N, F-A F - F- I-
F-U? 0P0 A A - 00 (P CI0O. - A P.t U IAm4. m? N .*- ý 0 F-0FF-0FOUI N.'UIt 4 *Ch UNON-0. 4) N 0 0 0 '0 4 In U% OD 0,O.4
P. 44 M~ a vt 10 U? N 0. P. tiA f I. n".4 719 CO: Q9 99 NN, N ----M9r- a N 0 0 0,0 0ý ' 0 179 P .
F--V- A 4 0 A U?0N- N M4.JON 01 NOMOL-44 4FN - A M4 M - ItIFO0 0 004 It4U'- P.NN99-1 %F-.NN A I- NW..F0U%61U% %1- 0.*. N 0
4 l ý 4 '. 40~ 0 4MMNNNNNNMM4'1",4 pO- 010 N Au ý-O4-.4-9
A '"01% 4 F- M4 F- N- 03 'J) IL . .? N F- .4F-1 0. 0, 7 c- F- .4 A AN -40. 0 214 4
cc 0. riF 0M 0,0 'a '0 0 Il.F '0 010 'a '. N -.. '0 00' W, W, m- F- In 4A %m .A ,V ?
~'c~N =I'' 0 .0 .1 N 0 0t o- o- o-1 9~ 0 %9.4009 1 *N4 oF
a -4 mi- -A m1 0 0 0 v0 0 00 N0 00. 0o 0rd '000A -- A' 00 00 0o0t16 oC00'0,00 C 00OX%0 1%00 1 0I0. 0OWC 000I00 cic
4999999~~~~~~ *99 9 9 9 9 *9 * 9 9 99 i~9 9 901.90
I~~- 000 0s0000,00 ~ 0 0 00000 0100000000mO
*a0 0 j 0 a -.: 0 It g 0g 0l 0. a 00 111
4 C4 IN00 0 W 4W% ý 90 I-0 M 9N 90 0010.F- 'UNI* ,tQ- 99 P f
.* . 9.. ......... . . .. .* .9 . .0000
NC 'C N N" NN P"- .J N NN N N N INJ. N N N N N V N N N N N N N1 N4 N
1 N NIN N N1 N N
0a0 0000000 a 00 030 0000 P00000000000
9~~~~~?~ '0l m)0 N . -~ 9 1 0 N .1 4 m' L4 99 * 0 N4 t9 '0 m' - UN ?F 0 -r 4 0 m .4 '1"f L - '2N 9 .1'0 . 0 O ~ U'F- ~ ' 0 99 4 t . ' 0'0 N 4 ut C S 0'C - NI 9 U" 'J. 0, 7 .1
.4 flf1 tfI*l''34' 40FF~-~ OO . -t2'0''0.' 0'U

- -0 .0 M Iq .'J P,
r- . t.f-I
*, O P. .4 ,
000 00 4 000,
00 i0 000000
7. C; 4i ,l i 9' C. 0.
* - 1
Nri DID ;Po -.1'N
,l 4D ZJ 1? N NI l* .~ j~00 0-:I

z X
.4 c
w %
ci H0 .9
AIW9 00
* 0 -0 wI -
.4 0 .1I
41 0 44 NOm..
*U 4 -1 ý 0 -ce. f.. 0. L00
cc - U i.-00
A-4 0 0NN N
- *LIA D-11

-0 0 t-rn 0 lo I -0 1. It-. 0.4I .00.i f IU ..d D 00 w I-Ad IA 0 m~l cc Nf P. N do (A m 4%
I I***I* to P. P* *ý .- . P. P. . * ***. * **t *
- :! m - 01.0 `0Q UW4 MG 0 NNm4 0LMN40O 0 - P Ac 0 .1061 % looI 4- e' N N0 'N0 .0'~ .f.0 4F-* aA. -w r-v 0 u
. . In F. *Y mI, Ln U, I("00O '44 M4'til- 4 P N p 4000 N O N Ot4ON3Ný
WI W I IN AI N f- F 0 IM(A' LA ML WI -4 '0 0 IN 0'.I r- NO IM N f -4 F- 4 ' % IN
I -N IN In mI In In r q.'' 4 4 w t IA A IA IA IAMA A A 0" A wA ' '4 r4 4 -t 4 -r +04
. . . .. . . . .. .~ * . .. . . . . . 0 . I I * I *
IN N IN N N 0 m A
I~ ~-0, 999 0OC00000 c~ o 00 . 00100
rI J'NN 4 1) 40 tw o. -A0' 0 4 zj 0 mI 01- It% IN9 0 .0 A0 . 0 AIN a A' (P.o ' WIm
-j~ o O000000o0 9999c ooo.000000000000 000r~o o olll9ý . . .. . .. .l
N~~~ V. 1W 1W N 40 0A N- '4 N W MI PA Q .4 M t'N-o 0 In 'M 0 Ný A N IN 4 N' N o.N
10 w a am-m" 4 N 4c0 9. w 0'40 m J, N mIN .0 0 m 4 P-N~. 1 0 4
. . . . . . ..00I0 .... . . . . . . . . . . . . . . ...f.......N A 0 , O C 00 IN4 1NN- -W :17 -4A1
IN 00 00 0 0,0-a 0 IN0 00 00% 000 0 0 00 .000 000
U~CA.4.0,C - 5 5A -' C DINIAN IN N AO NU a'mmm 4a..- W 4 ~ N0 NI m 4 w'. z o' 0-W m L .4 9- 0'0.. . .ti . O . ' . . N. II 0 00
.9 99.9% 911
.Y yI 0 1 a ' - P

P- ' m 0 N 0 c-?t
A0V~ 'LA A MN W A (Y P- 0~ 0 ly, N* .0 0 M C, 0~.~....~
~~~'~ M A- 1 N NF N N~ 0 N NF - V 0 NC'' NC NC N' (Y'~ r N N N N N.0m
*.n~ * 5 * * * n. w* *5, in 6n A
0,, 00 00o 0 . m 0 m m 0N m 0 0 00 CJ 0 00 -P. "
No :1:000 S0d a o = W F" 0'F- A1MN
N, 0'-46 0 p- -t '0 0F P.. 'C .4 N 0 0'0FC f A' -A
m 0.- a R -04Nt
0 ý -' 0 N0 M 0? 00 00,#M4 0 00 00 00 0 0 00 M0 00 00 0F-P3 DI N' 4O -P -t 0000 0 0 0 0 Q N00 60 N0 000 00 0do0 go0
m' 0N' P-0.n Uar ,0 N' a, w a, 4 O 1N P.- 90 0-.4 m lA-*Amw O O ' t -C -
V0. 9 999 '20NC 0000 . . . . . . .0CN.'0C09.3
- . ----0---- -----.
0. P 0% Ifl * L 0 & M 4 a V,'t 0 L

P.. No41. x -d6 aW
1. w '-'a. 4..,.
cc It 1- fm M 'A
e o..O 0d
f~~OPC00 0
to o 4 oý .0 00000
j a: aD o P~ -0 (p0m r400m04 0 F 4- OD a
c .a . 0 0 0 00 00
N400N#4 ,
.4.4-4-









![On Non-finite Forms in "m" and Possessor Agreement Marking in Erzya: Nominative and Ablative Jack M Rueter rueter[at]cc.helsinki.fi Grammar and Context](https://img.pdfslide.net/doc/110x75/5697bf891a28abf838c89d5d/on-non-finite-forms-in-m-and-possessor-agreement-marking-in-erzya-nominative.jpg)


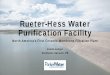








![Disputed cases in Erzya Jack Rueter 1 SKY 2009 Cases in and across languages ©Jack Rueter rueter[at]cc.helsinki.fi](https://img.pdfslide.net/doc/110x75/56649ef35503460f94c060a5/disputed-cases-in-erzya-jack-rueter-1-sky-2009-cases-in-and-across-languages.jpg)







