-
Distributed Diagnosis of Discrete-Event SystemsUsing Petri Nets
?
Sahika Genc and Stéphane Lafortune
Department of Electrical Engineering and Computer
Science,University of Michigan,
1301 Beal Avenue, Ann Arbor, MI, 48109-2122
USA{sgenc,stephane}@eecs.umich.edu; www.eecs.umich.edu/umdes
Abstract. The problem of detecting and isolating fault events in
dy-namic systems modeled as discrete-event systems is considered.
Themodeling formalism adopted is that of Petri nets with labeled
transi-tions, where some of the transitions are labeled by
different types ofunobservable fault events. The Diagnoser Approach
for discrete-eventsystems modeled by automata developed in earlier
work is adapted andextended to on-line fault diagnosis of systems
modeled by Petri nets, re-sulting in a centralized diagnosis
algorithm based on the notion of “Petrinet diagnosers”. A
distributed version of this centralized algorithm is alsopresented.
This distributed version assumes that the Petri net model ofthe
system can be decomposed into two place-bordered Petri nets
satis-fying certain conditions and that the two resulting Petri net
diagnoserscan exchange messages upon the occurrence of observable
events. It isshown that this distributed algorithm is correct in
the sense that it re-covers the same diagnostic information as the
centralized algorithm. Thedistributed algorithm provides an
approach for tackling fault diagnosisof large complex systems.
1 Introduction
The problem of detecting and isolating faults in technological
systems has re-ceived considerable attention due to its importance
in terms of safety and effi-ciency of operation. A variety of
complementary approaches have been proposed,based on the level of
detail chosen for the model of the system and the kinds offaults
that need to be diagnosed; see, e.g., [1]. In this paper, we
consider techno-logical systems that can be modeled at some level
of abstraction as discrete-eventdynamic systems [2]. This includes
a wide variety of technological systems suchas automated
manufacturing systems, communication networks, heating,
venti-lation, and air-conditioning units, process control systems,
and power systems.Faults are modeled as unobservable events,
namely, events whose occurrence isnot directly detected by the
sensors. Rather, the occurrence of fault events mustbe inferred
from the system model and future observations of the evolution
of
? This research is supported in part by NSF grant
ECS-0080406.
-
the system. This is often referred to as “model-based
diagnostics.” The faults ofinterest are those that cause a distinct
change in the operation of the system butdo not necessarily bring
it to a halt. Examples of such faults include: equipmentfaults
(e.g., stuck faults of valves, stalling of actuators, bias faults
of sensors,controller faults, and degraded or worn-out components),
as well as many typesof process faults (e.g., overflow of buffers
in manufacturing and communicationnetworks, contamination in
semiconductor manufacturing, and control softwarefaults).
The discrete-event modeling formalism adopted in this paper is
that of Petrinets with labeled transitions, where some of the
transitions are labeled by dif-ferent types of unobservable fault
events. Our objective is to adapt and extend,in the context of
Petri net models, a recently-proposed approach for fault di-agnosis
of discrete-event systems modeled by finite-state automata, termed
the“Diagnoser Approach”; see [3] and the references therein,
including [4, 5]. Thatapproach has been used successfully in a
variety of application areas, includ-ing heating, ventilation, and
air-conditioning units [6], intelligent transportationsystems [7,
8], document processing systems [9, 10], and chemical process
control[11]. In the Diagnoser Approach, a diagnoser automaton, or
simply diagnoser, iscontructed from (i) the finite-state automaton
model of the discrete-event sys-tem, (ii) the set of unobservable
events, (iii) the set of fault events, and (iv) thepartition of the
set of fault events into fault types. The states of the
diagnosercontain information about the possible occurrence of
faults, according to the sys-tem model. The diagnoser is then used
for on-line fault diagnosis of the system asfollows. Each
observable event executed by the system triggers a state
transitionin the diagnoser. Examination of the current diagnoser
state reveals the status ofthe different types of faults: fault(s)
of Type F1 did not occur, fault(s) of TypeF1 possibly occurred
(“F1-uncertain state” in the terminology of [4]), fault(s)of Type
F1 occurred for sure (“F1-certain state” in the terminology of
[4]). It isthis capability of diagnosers that we wish to extend to
Petri net models of thesystem. Diagnosers can also be used to
analyze the diagnosability properties ofthe system (“Can all fault
types eventually be detected?”), but this aspect isnot considered
in this paper.
There are many reasons for extending the Diagnoser Approach to
Petri nets.Our primary motivation is to take advantage of the
modularity of Petri netmodels and thereby propose a
modular/distributed version of the DiagnoserApproach that can help
in mitigating the state space explosion problem thatoften occurs in
discrete-event modeling of complex systems. Consequently,
thecontribution of this paper is two-fold. First, a centralized
diagnosis algorithmbased on the novel notion of “Petri net
diagnosers” is presented in Section 2for on-line diagnosis of
systems modeled by Petri nets. The Petri net diagnoserassociated
with a Petri net has the same graphical structure as the Petri net
buthas a different state transition function. In addition, Petri
net diagnosers includeseveral markings of the net at any given
time, corresponding to the notion in theDiagnoser Approach that the
state of the diagnoser is a form of state estimate(of the system)
together with fault type information. (Due to the simultaneous
-
presence of different markings in Petri net diagnosers, we can
think of them asa special kind of colored Petri nets.)
The second contribution of this paper is to present, in Section
3, a distributedversion of the above-mentioned centralized
algorithm. This distributed versionassumes that the Petri net model
of the system can be decomposed into twoplace-bordered Petri nets
satisfying certain conditions. Moreover, it is assumedthat the two
resulting Petri net diagnosers can exchange messages upon
theoccurrence of observable events. A method to decompose the
system into place-bordered nets is given, if such a decomposition
is necessary. We refer the reader to([12, 13]) for modular modeling
methodologies that result in place-bordered nets.We show that our
distributed algorithm is correct in the sense that it recoversthe
same diagnostic information as the centralized algorithm. The
distributedalgorithm provides an approach for tackling fault
diagnosis of large complexsystems, in particular networked systems
where the different system modules areconnected by a communication
network.
To the best of our knowledge, the present paper is the first to
explore the ex-tension of the Diagnoser Approach originally
proposed in [4] to Petri net models.However, there has been prior
work on the general problem of monitoring andfault diagnosis of
dynamic systems using Petri net models. We mention in thisregard
the work done at IRISA/INRIA on alarm supervision in
telecommunica-tion networks [14, 15] and the work done on detection
of loss or creation of tokensin nets using matrix algebraic
techniques in [16]. Our problem formulation andobjective however
differ from those in [14–17]. They also differ from the work
onobservability of Petri nets in [18].
The remainder of this paper is organized as follows. Section 2
starts by pre-senting our notation for labeled Petri nets and then
presents the centralizedalgorithm for on-line diagnosis of dynamic
systems using Petri net diagnosers.The distributed version of the
centralized algorithm, termed Algorithm DDC for“distributed
diagnosis with communication” is presented in Section 3.
AlgorithmDDC consists of two communicating Petri net diagnosers,
whose respective statescan be “merged” (in a technical sense made
precise in Section 3) to recover thestate of the corresponding
centralized Petri net diagnoser. An illustrative ex-ample is used
throughout the paper and conclusions are presented in Section4.
2 Centralized Diagnosis Using Petri Net Diagnosers
In this section, we define the notion of a centralized Petri net
diagnoser, orsimply diagnoser, which is used as a tool to detect
and isolate faults in thesystem. The system to be diagnosed is
modeled by a labeled Petri net. Thecentralized diagnoser observes
the system and determines the states the systemcan be in upon
observation of an event. Note that upon observation of an event,the
state of the system is not known exactly in general due to the
presence ofunobservable events in the set of transition labels. The
Petri net diagnoser findsall the states the system can be in,
namely, all the states that are consistent with
-
the sequence of observable events seen thus far. Fault
information is attached tothese state estimates in the from of
fault labels. The faults are explicitly modeledas events in the
system. Figure 1 gives a block diagram of the system and
itsdiagnoser interacting with each other (the notation in the
figure is introducedbelow in Section 2.1 and 2.2).
N Nd
s So oe F
i
System Model Diagnoser
ObservableEvent
FailureType
Fig. 1. Centralized diagnosis
This section first defines how the system and the diagnoser are
modeledand gives their graphical representation. Then, we define
the dynamics of thediagnoser. Although the diagnoser is modeled as
a labeled Petri net graphically,its state transition function and
states differ from regular Petri nets. We concludethe section by an
example that builds the diagnoser and finds some of its states.
2.1 System Model
A Petri net graph 1 is a weighted bipartite graph
N = 〈P, T, A,w〉 (1)where P is the finite set of places, T is the
finite set of transitions, A ⊆ (P ×T )∪ (T ×P ) is the set of arcs
from places to transitions and from transitions toplaces, and w : A
→ Z+ is the weight function on the arcs. In a Petri net graphN ,
given t ∈ T we denote by I(t) = {p ∈ P : (p, t) ∈ A} the set of
input placesto transition t, and similarly we denote by O(t) = {p ∈
P : (t, p) ∈ A} the set ofoutput places of t.
A marking of a Petri net graph is a mapping x : P → N. A state
is repre-sented by x = [x(p1), x(p2), . . . x(pn)], where p1, p2, .
. . , pn is an arbitrary fixedenumeration of P and n is the number
of elements of P . A Petri net is a pair(N , x0), where N is Petri
net graph and x0 is the initial state. The state spaceof (N , x0)
is given by X = Nn and x0 ∈ X. The state transition functionf : X ×
T → X of a Petri net (N , x0) is defined for state x ∈ X and
transitiont ∈ T if x(p) ≥ w(p, t) for all p ∈ I(t). That is, a
transition t can fire from x ifand only if t is feasible from x and
when t fires, f(x, t) gives the resulting state.If f(x, t) is
defined, then we set x′ = f(x, t) where
x′(p) = x(p)− w(p, t) + w(t, p), for all p ∈ P. (2)Not all the
states in X are reachable in (N , x0). In order to define the set
of
reachable states, denoted by R(N , x0), of Petri net (N , x0),
we first extend the1 The notation and terminology used in this
paper mostly follow those in [2, 19].
-
state transition function f from domain X × T to domain X × T
∗:
f(x, ε) := x (3)f(x, st) := f(f(x, s), t) for s ∈ T ∗ and t ∈ T
(4)
where ε is to be interpreted as the absence of transition firing
and T ∗ denotesthe Kleene-closure of T . The set of reachable
states of Petri net (N , x0) is
R(N , x0) := {x′ ∈ X : ∃s ∈ T ∗ such that f(x0, s) = x′} (5)
The system to be diagnosed is modeled by a labeled Petri net
(N , Σ, l, x0) (6)
where Σ is the set of event labels for the transitions in T , l
: T → Σ is the tran-sition labeling function, and x0 is the initial
state. The event labeling function lis extended to l : T ∗ → Σ∗ in
the following manner: given t, t′ ∈ T and a, a′ ∈ Σ,
l(t) = a and l(t′) = a′ ⇒ l(tt′) = l(t)l(t′) = aa′. (7)
The language generated by the labeled Petri net (N , Σ, l, x0),
denoted byL(N , Σ, l, x0), is the set of all traces of events that
can be generated by (N , Σ, l, x0)from its initial state x0. L(N ,
Σ, l, x0) is formally defined as
L(N , Σ, l, x0) = {l(s) ∈ Σ∗ : s ∈ T ∗ and f(x0, s) is defined}.
(8)
Some of the events in Σ are observable, i.e., their occurrence
can be observed(detected by sensors), and while the other events
are unobservable. Thus Σ ispartitioned into observable and
unobservable event sets: Σ = Σo ∪ Σuo. Theobservable events in the
system may be commands issued by the controller,sensor readings,
and changes of sensor readings. On the other hand,
unobservableevents may be fault events and some events that cause
changes in the systemstate that are not recorded by sensors.
We model faults as events. The set of fault events Σf is a
subset of Σ. Sinceit is trivial to diagnose fault events that are
observable, we assume Σf ⊆ Σuo.Our goal is to detect the occurrence
of fault events, if any, from the observableof traces of events
generated by the system.
We partition the set of fault events into disjoint sets where
each disjoint setcorresponds to a different fault type. The
motivation for doing so is that it mightnot be necessary to detect
uniquely every fault event, but only the occurrenceof one among a
subset (type) of fault events. We write
Σf = ΣF1∪̇ · · · ∪̇ΣFk (9)
where ΣFi denotes the set of fault events corresponding to a
type i fault, 1 ≤i ≤ k, where k is the number of fault types. When
we write “a fault of type ihas occurred”, we mean that a fault
event from the set ΣFi has occurred.
-
2.2 Petri Net Diagnoser
We now introduce the diagnoser. The diagnoser is a labeled Petri
net built fromthe system model (N , Σ, l, x0). This labeled Petri
net performs diagnostics whileobserving on-line the behavior of (N
, Σ, l, x0).
The diagnoser for (N , Σ, l, x0) isNd = (N , Σ, l, xd0,∆f )
(10)
where N , Σ, l are defined as before, xd0 is the initial
diagnoser state and ∆f ={F1, F2, ..., Fk} is the finite set of
fault types. The diagnoser Petri net Nd keepsthe graphical
structure of the underlying system model. Up to this point Nd isnot
different from a labeled Petri net. However, its dynamics are
different fromthose of a labeled Petri net since its state
transition function is only defined forobservable events.
The diagnoser gives the estimate of the current state of the
system after theoccurrence of an observable event. Hereafter when
we say “state”, we mean thestate of the system model and when we
say “diagnoser state”, we mean the stateof the diagnoser. The
diagnoser state is a list of the set of states the system modelcan
be in after observation of an event in Σo together with fault
information.Fault information in a diagnoser state is coded by
fault labels.
Every state in a diagnoser state has a fault label. A fault
label is a vectorof length k (the number of fault types) which has
entries of “0” or “1”. If wedenote the fault label by lf , then lf
∈ ∆ = {0, 1}k. Thus, the number of possiblefault labels is |∆| =
2k. When the fault label is the zero vector, we say the faultlabel
is “normal”. The initial state has the “normal” fault label by
definition.
We now define the fault label propagation function LP : X×∆×T ∗
→ ∆. LPpropagates the fault labels consistent with the traces of
events. Let x ∈ X, lf ∈ ∆and s ∈ T ∗. Then LP (x, lf , s) is
defined as
LP (x, lf , s) = lf +k∑
i=1
bsi (11)
where bsi ∈ ∆ and
bsi =
[0, · · · , 0, 1, 0, · · · , 0], if l(s) contains an event from
ΣFi,↑ith coloumn
[0 , · · · , 0, 0, 0, · · · , 0] , otherwise.(12)
Before we define the diagnoser state and the diagnoser state
transition func-tion, we need the notion of unobservable reach of a
diagnoser state. To define theunobservable reach of a diagnoser
state we first define the unobservable reach ofa state.
Let xd,i = xili denote a state with fault label li in the
diagnoser state xd.The unobservable reach of xd,i is denoted by
UR(xd,i) and defined as follows:
UR(xd,i) := {xili} ∪ {yly : ∃y ∈ R(N , xi), ∃s ∈ T ∗, l(s) ∈
Σ∗uo(f(xi, s) = y) and (ly = LP (xi, li, s))}. (13)
-
The unobservable reach of the diagnoser state xd is the listing
of all distinctvectors UR(xd,i) for all xd,i in xd; it is denoted
by UR(xd).
We can now define the initial diagnoser state xd0 of Nd. xdo is
the listing ofall distinct elements of UR(x0l0), where x0 is the
initial state of the underlyinglabeled Petri net (N , Σ, l, x0) and
l0 is the fault label of x0 that is “normal” bydefinition.
We find the diagnoser states reachable from the initial
diagnoser state byusing the diagnoser state transition function. In
order to define the diagnoserstate transition function, we first
define the feasible transitions and then thestates reached by
firing the feasible transitions.
We denote by B(xd,i, a) the feasible transitions from xd,i =
xili where xi ∈ Xis a state in diagnoser state xd, li is the fault
label of xi, and a is an event inΣo. Formally, B(xd,i, a) is
defined as
B(xd,i, a) = {t ∈ T : l(t) = a and for all p ∈ I(t) (xi(p) ≥
w(p, t))}. (14)
We define B(xd, a) to be the set resulting from the union of
B(xd,i, a) for alli, where 1 ≤ i ≤ r, i.e.,
B(xd, a) = ∪1≤i≤rB(xd,i, a), (15)
where r is the number of rows of xd.We denote by S(xd, a) the
set of all distinct reachable states, together with
their fault labels, when all transitions in B(xd,i, a) are fired
from every xd,i inxd. Namely, S(xd, a) is defined as
S(xd, a) := ∪1≤i≤r ∪t∈B(xd,i,a) {x′il′i : x
′i = f(xi, t), l
′i = li} (16)
where xi is a state in xd, li is the fault label of xi, and r is
the number of statesin xd. Since the fault events are unobservable,
the label propagation functiondoes not change the fault labels of
the states in the process of building S(xd, a).
The diagnoser state transition function of Nd is fd : Xd × Σ0 →
Xd whereXd is the state space of the diagnoser Nd. Given the
diagnoser state xd and theevent a ∈ Σo, fd(xd, a) is defined if
B(xd,i, a) 6= ∅ for some xd,i in xd. If fd(xd, a)is defined, then
x′d = fd(xd, a) and x
′d is the listing of the elements of the set
∪s∈S(xd,a)UR(s). (17)
The diagnostic information provided by a diagnoser state is
given by exam-ining the last k columns of that state: (i) if a
column contains only 0’s, thenwe know that no fault event of the
corresponding type could have occurred; (ii)if a column contains
only 1’s, then we are sure that at least one fault event ofthat
type has occurred; (iii) otherwise, if a column contains 0’s and
1’s, we areuncertain about the occurrence of a fault of that type.
If the diagnoser is surethat a fault of type i has occurred, then
it outputs “Fn” as indicated in Figure1. This diagnostic
infortmation is equivalent to that obtained from diagnoserautomata
in the Diagnoser Approach of [4].
-
Example 1. Consider the Petri net graph N given in Fig. 2. The
set of places ofN is P = {p1, p2, . . . , p16}. The set of
transitions of N is T = {t1, t2, . . . , t17}.All arc weights are
equal to 1. The initial marking x0 is
x0 = [ 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 ] (18)
The set of events is Σ = {a, e, g, h, σuo, f1, f2}. We do not
explicitly writethe event labeling function l, but the event label
of every transition t ∈ T isshown in Fig. 2. The set of
unobservable events is Σuo = {σuo, f1, f2} and allthe remaining
events in event set Σ are observable. There are two types of
faultsand the sets corresponding them are Σf1 = {f1} and Σf2 =
{f2}.
Let Nd = (N , Σ, l, x0,∆f ) denote the diagnoser. The initial
diagnoser statex0 is the listing of the elements of set UR(x0l0)
where l0 is “normal”. Then, x0
is found as
x0 =
1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 |0 00 1 1 1 0 0 0 0 0 0 0 0 0 0
0 0 |0 00 0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 |1 00 1 1 0 0 0 1 0 0 0 0 0
0 0 0 0 |0 0
•�4∗
(19)
These four states in the initial diagnoser state are shown in Nd
in Fig. 2 byusing four types of tokens.
We show in (20)-(22), the states of the diagnoser that are
reached if thesequence of observable events is “aeh”. An
examination of the last two columnsof x1, x2 and x3 reveals that:
(i) x1 and x2 are F1-uncertain (f1 could havehappened but we do not
know for sure) and (ii) x2 and x3 are F2-uncertain.The complete
state space of Nd contains 28 diagnoser states. These states arenot
listed here due to space constraints. We note that we wrote a
Matlabprogram to generate the state space of Petri net
diagnosers.
x1 = fd(x0, a) =
1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 |0 00 0 0 1 0 1 0 0 0 0 0 0 0 0
0 0 |0 00 1 1 0 0 0 0 1 0 0 0 0 0 0 0 0 |0 00 1 1 0 0 0 0 0 1 0 0 0
0 0 0 0 |1 00 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 |0 00 1 1 0 0 0 0 0 0 0
1 0 0 0 0 0 |0 0
(20)
x2 = fd(x1, e) =
1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 |0 00 0 0 1 0 0 0 0 0 1 0 0 0 0
0 0 |0 00 1 1 0 0 0 0 0 0 0 0 1 0 0 0 0 |0 00 1 1 0 0 0 0 0 0 0 0 0
1 0 0 0 |1 00 0 0 0 0 0 1 0 0 1 0 0 0 0 0 0 |0 00 1 1 0 0 0 0 0 0 0
0 0 0 0 1 0 |0 01 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 |0 10 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 |0 10 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 |0 10 0 0 0 0 0
1 0 0 0 0 0 0 1 0 0 |0 1
(21)
x3 = fd(x2, h) =[
0 1 1 0 0 0 0 0 0 0 0 0 0 0 1 0 |0 00 1 1 0 0 0 0 0 0 0 0 0 0 0
0 1 |0 1
](22)
-
suo
f1 a
suo
a
e
h
a
e
f2
h
a
e
g
e
f2
g
p1
t1
t4
t8
t12
t16
t2
t5
t9
t13
t17
t3
t6
t10
t14
t7
t11
t15
p4
p7
p11
p15
p2
p5
p8
p12
p16
p3
p6
p9
p13
p10
p14
N
suo
f1 a
suo
a
e
h
a
e
f2
h
a
e
g
e
f2
g
p1
t1
t4
t8
t12
t16
t2
t5
t9
t13
t17
t3
t6
t10
t14
t7
t11
t15
p4
p7
p11
p15
p2
p5
p8
p12
p16
p3
p6
p9
p13
p10
p14
Nd *
*
*
Fig. 2. The Petri net graph N with initial marking x0 is given
on the left, and its Petrinet diagnoser Nd with the initial
diagnoser state x0 is given on the right
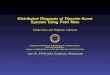
3 Distributed Diagnosis with Communication
In this section, we study the problem of distributed diagnosis
with communica-tion. In the case of centralized diagnosis, there is
one diagnoser working on theentire system model and processing all
the observations. We are interested in thesituation depicted in
Fig. 3 where there are two diagnosers, each containing onlypart of
the model and each observing only a subset of the observed events.
Weallow these two diagnosers to communicate after the occurrence of
an observableevent.
We begin this section by defining the distributed system model
and the dis-tributed diagnosers. In the second part, we define the
communication protocoland give the algorithm of distributed
diagnosis with communication at the endof the subsection. Then, we
state the main result of this paper and give its proof.
3.1 System Model
The system to be diagnosed is given by the labeled Petri net (N
, Σ, l, x0). Wewish to partition (N , Σ, l, x0) into two
“place-bordered” labeled Petri nets using
-
Nd ,1
Nd ,2
s So o, 1e
s So o, 2e
Fi
Fj
System Model
Diagnoser
Diagnoser
Observable Event ofFirst Diagnoser
Observable Event ofSecond Diagnoser
FailureType
FailureType
Communication
N1
N2
Common
Places
Fig. 3. Distributed diagnosis with communication
a partition on the event set Σ. For this purpose, let ΠΣ be a
partition on Σ suchthat Σ = Σ1 ∪Σ2 and Σ1 ∩Σ2 = ∅. Then, we define
the place-bordered labeledPetri nets (N1, Σ1, l1, x01) and (N2, Σ2,
l2, x02) where N1 = 〈P1, T1, A1, w1〉 andN2 = 〈P2, T2, A2, w2〉 by
the following conditions
1. ∀t ∈ T if l(t) ∈ Σ1, then t ∈ T1; ∀t ∈ T if l(t) ∈ Σ2, then t
∈ T2.2. P1 = ∪t∈T1 (I(t) ∪O(t)), P2 = ∪t∈T2 (I(t) ∪O(t)).
The corresponding Petri net graphs N1 and N2 have disjoint sets
of transitions.However, the sets of places are not disjoint, i.e.,
there may exist t1 and t2 suchthat O(t1) ∩ I(t2) 6= ∅ or I(t1)
∩O(t2) 6= ∅. A1 and A2 are the restrictions of Ato (P1 × T1) ∪ (T1
× P1) and (P2 × T2) ∪ (T2 × P2), respectively. Similarly forw1, w2
and l1, l2. x0 can be written as
x0 = [x0,P1−Pc , x0,Pc , x0,P2−Pc ] (23)
where Pc = P1 ∩ P2 denotes the set of common places, x0,P1−Pc
denotes thecolumns of markings corresponding to the places in the
set (P1 − Pc)[we use −to denote the set difference]; x0,Pc and
x0,P2−Pc are defined similarly. Then, x01is defined as
x01 = [x0,P1−Pc , x0,Pc ], (24)
and x02 is defined asx02 = [x0,Pc , x0,P2−Pc ]. (25)
Every labeled Petri net (N , Σ, l, x0) can be partitioned into
place-borderednets (N1, Σ1, l1, x01) and (N2, Σ2, l2, x02) using
the method described above.But not all partitions allow us to do
distributed diagnosis. Suppose Nd,1 =(N1, Σ1, l1, xd,01,∆f,1) and
Nd,2 = (N2, Σ2, l2, xd,02, ∆f,2) are diagnosers for(N1, Σ1, l1,
x01) and (N2, Σ2, l2, x02), respectively. The sets ∆f,1 and ∆f,2
arethe finite sets of fault types of Nd,1 and Nd,2, respectively,
and ∆f,1∪∆f,2 = ∆f .Then, Nd,1 and Nd,2 must satisfy the two
following conditions to perform dis-tributed diagnosis:
1. ∀t ∈ T if (I(t) ∪O(t)) ∩ (P1 ∩ P2) 6= ∅ , then l(t) ∈ Σo.2.
∀t1 ∈ T1 and ∀t2 ∈ T2, if l(t1) ∈ ΣFi and l(t2) ∈ ΣFj , then i 6=
j.
-
The first condition says that the transitions putting tokens in
or removingtokens from common places are labeled with observable
events. The second con-dition ensures that if two transitions
belong to different place-bordered netsthen they belong to
different types of faults, i.e, ∆f,1 ∩∆f,2 = ∅. This assump-tion is
made for the sake of simplicity; it could be relaxed at the price
of extracommunication between the diagnosers.
The initial diagnoser states xd,01 and xd,02 are listings of the
elements of thesets UR(x01l01f ) and UR(x02l
02f ), respectively. The fault label l
01f is in ∆1 where
∆1 is the set of possible fault types in Nd,1, and similarly the
fault label l02f isin ∆2 where ∆2 is the set of possible fault
types in Nd,2.
3.2 Algorithm of Distributed Diagnosis with Communication
Nd,1 and Nd,2 diagnose (N1, Σ1, l1, x01) and (N2, Σ2, l2, x02),
respectively. How-ever, the individual estimates of Nd,1 and Nd,2
do not provide enough informa-tion for diagnosis, if Nd,1 and Nd,1
work in isolation. This is because N1 and N2do not have disjoint
sets of places and both nets can change the markings onthe common
places and then effect each other. If Nd,1 and Nd,2 are not
informedof each others’ changes of markings, then their state
estimates are incompleteor otherwise wrong. We overcome this
problem by defining a communicationprotocol between diagnosers.
This protocol recovers the centralized diagnosisinformation by
allowing the two diagnosers to send each other the change
ofmarkings on the common places.
We define the weighting vector W (t) for a labeled Petri net
graph as
W (t) = [w(t, p1)−w(p1, t), w(t, p2)−w(p2, t), . . . , w(t, p|P
|)−w(p|P |, t)] (26)
where t ∈ T and pi ∈ P for all 1 ≤ i ≤ |P |. When we write
WPc(t), this meansthe columns of W (t) corresponding to the common
places of N1 and N2. We usethe same notation in the states and the
diagnoser states. That is, as was done forthe initial state in the
previous section if x ∈ X, then xP1 denotes the columnsof x
corresponding to the places of N1 and if xd ∈ Xd, then xd,P1
denotes thecolumns of xd corresponding to the places of N1.
In contrast with centralized diagnoser states, distributed
diagnoser statescarry message labels. Message labels record the
actions on the common places.Let lm be the message label of x ∈ X
and t = t1t2 . . . t|t| ∈ T ∗ be a string oftransitions. If x′ =
f(x, t), i.e., x′ = f(· · · f(f(x, t1), t2), t|t|), then the
messagelabel propagation function MLP defines the message label l′m
of x
′ as
l′m = MLP (x, lm, t) = [lm, WPc(t1), WPc(t2), . . . ,
WPc(t|t|)]. (27)
The length of the message label l′m is bounded by (|lm|+
|t||Pc|).The message label of a diagnoser state is the listing of
the message labels for
every state in the diagnoser state, i.e., every row of the
diagnoser state. Given adiagnoser state xd, we denote by MLabel(xd)
the message label of xd. Supposethat xd is reached from x′d by
firing transition t labeled by observable event σo. If
-
WPc(t) is equal to the zero vector for every state reached in
xd, then the messagelabel of xd is equal to the message label of
x′d, i.e., MLabel(xd) = MLabel(x
′d).
As defined the length of the message labels will grow
unboundedly as thenumber of observed events grows unboundedly.
However, the message labels ofdiagnoser states can be truncated
under the following conditions. Given thediagnoser state xd ∈ Nn×k,
let lim denote the message label of the state in theith row of xd.
Then for all i where 1 ≤ i ≤ n if the message labels are of theform
lim = abi, i.e., they have a common prefix a but different suffixes
bi), thenthese message labels are truncated to lim = bi.
Communication among the two diagnosers are triggered by the
occurrenceof observable events. When Nd,1 observes event σo ∈ Σo,1,
then Nd,1 updates itsdiagnoser state and sends the message label of
the resulting diagnoser state toNd,2. We assume that the message is
correctly received by Nd,2 without delay (orwith delay that is less
than the minimum interarrival time). Upon reception ofthe message,
Nd,2 uses the received message label to update its current
diagnoserstate. We will demonstrate that under this protocol, the
centralized diagnoserstate can be recovered from the diagnoser
states of Nd,1 and Nd,2. We nowformalize this protocol for
distributed diagnosis with communication (DDC).
From now on when we denote a diagnoser state xd,1 of the
diagnoser Nd,1, wewill drop the subscript d and write x1 instead of
xd,1. We use the same notationfor the diagnoser states of diagnoser
Nd,2.Algorithm DDC. Given that the sequence s = σo0σo1 . . . σon is
observed where|s| = n + 1, initialize the algorithm i := 0.
Upon observation of σoi do { If σoi ∈ Σ1, then go to 1, else go
to 2 }1 {Master is Nd,1 }
1.1 Find the next diagnoser state of Nd,1:xi+11 = fd,1(x
i1, σoi),
where fd,1 is the diagnoser state transition function of Nd,1
and x11 isthe diagnoser state of Nd,1 after the completion of the
DDC algorithmfor the event σo(i−1).
1.2 If WPc(t) = 0 for all t ∈ B(xi1, σoi), then equate xi+12 to
xi2 and go to1.4.
1.3 Send a “message” to Nd,2:message := MLabel(xi+11 )
Upon reception of this message, Nd,2 “updates” xi2 to xi+12 as
follows:Initialize diagnoser state xi+12 to empty matrix. For k
from 1 to r wherer denotes the number of rows of “message”, do the
following
1.3.1 Given
messagek = [message prefixk, message presentk],
where message presentk is the last |Pc| columns of the
messagekand message prefixk is the rest of it, extract the set M of
states ofxi2 with message labels that are equal to message
prefixk.
-
1.3.2 Given M , construct the set M as follows
sPc = sPc + message presentk, sP2−Pc = sP2−Pc ,
lsm = [lsm,message presentk]
where s ∈ M , s ∈ M and lsm and lsm are the message labels of s
ands, respectively.
1.3.3 Append every element of M to xi+12 as a new row.1.4 If
possible, truncate message labels of both xi+11 and x
i+12 .
1.5 Increment i.2 {Master is Nd,2 } Same as 1 but exchange 1 and
2 in every expression.
End
Example 2. We use the same labeled Petri net in Example 1. We
choose an ar-bitrary event partition ΠΣ such that Σ1 = {a, σuo, f1}
and Σ2 = {e, g, h, f2}.Given this event partition the set of
transitions of N1 and N2 are T1 = {t1, t2, t3,t4, t5, t6, t8} and
T2 = {t7, t9, t10, t11, t12, t13, t14, t15, t16, t17},
respectively. Theset of common places is Pc = {p3, p6, p8, p9,
p11}. The resulting place-borderedPetri net graphs are shown in
Fig. 4. In Fig. 4, common places are shown withdashed lines.
Place-bordered Petri nets (N1, Σ1, l1, x01) and (N2, Σ2, l2, x02)
sat-isfy the two conditions to be eligible for distributed
diagnosis. That is, all thetransitions putting tokens in or
removing tokens from common places in bothPetri net graphs are
labeled with observable events, and the sets of fault typesof these
nets are disjoint.
Suppose event sequence “aeh” is observed. The diagnoser states
of Nd,1 andNd,2 at end of each iteration are
x01 =
1 1 1 0 0 0 0 0 0 0 |00 1 1 1 0 0 0 0 0 0 |00 0 1 0 1 0 0 0 0 0
|10 1 1 0 0 0 1 0 0 0 |1
, x02 =
[1 0 0 0 0 0 0 0 0 0 0 |0
](28)
x11 =
1 0 0 0 0 1 0 0 0 0 |0| −1 1 0 0 00 0 0 1 0 1 0 0 0 0 |0| −1 1 0
0 00 1 1 0 0 0 0 1 0 0 |0| 0 0 1 0 00 1 1 0 0 0 0 0 1 0 |1| 0 0 0 1
00 0 0 0 0 1 1 0 0 0 |1| −1 1 0 0 00 1 1 0 0 0 0 0 0 1 |1| 0 0 0 0
1
, x12 =
0 1 0 0 0 0 0 0 0 0 0 |0| −1 1 0 0 01 0 1 0 0 0 0 0 0 0 0 |0| 0
0 1 0 01 0 0 1 0 0 0 0 0 0 0 |0| 0 0 0 1 01 0 0 0 0 1 0 0 0 0 0 |0|
0 0 0 0 1
(29)
x21 =
1 0 0 0 0 0 0 0 0 0 |0| −1 1 0 0 0 0 −1 0 0 00 0 0 1 0 0 0 0 0 0
|0| −1 1 0 0 0 0 −1 0 0 00 0 0 0 0 0 1 0 0 0 |1| −1 1 0 0 0 0 −1 0
0 00 1 1 0 0 0 0 0 0 0 |0| 0 0 1 0 0 0 0 −1 0 00 1 1 0 0 0 0 0 0 0
|1| 0 0 0 1 0 0 0 0 −1 00 1 1 0 0 0 0 0 0 0 |1| 0 0 0 0 1 0 0 0 0
−1
, (30)
-
x22 =
0 0 0 0 1 0 0 0 0 0 0 |0| −1 1 0 0 0 0 −1 0 0 01 0 0 0 0 0 1 0 0
0 0 |0| 0 0 1 0 0 0 0 −1 0 01 0 0 0 0 0 0 1 0 0 0 |0| 0 0 0 1 0 0 0
0 −1 01 0 0 0 0 0 0 0 0 1 0 |0| 0 0 0 0 1 0 0 0 0 −10 0 0 0 0 0 0 0
1 0 0 |1| −1 1 0 0 0 0 −1 0 0 01 0 0 0 0 0 0 0 0 0 1 |1| 0 0 1 0 0
0 0 −1 0 0
. (31)
x31 = x21, x
32 =
[1 0 0 0 0 0 0 0 0 1 0 |0| 0 0 0 0 1 0 0 0 0 −11 0 0 0 0 0 0 0 0
0 1 |1| 0 0 1 0 0 0 0 −1 0 0
]. (32)
The above diagnoser states of Nd,1 and Nd,2 were found by a
Matlab pro-gram that implements Algorithm DDC.
3.3 Recovering the Centralized Diagnoser State from
theDistributed Diagnoser States
In this section we show how the centralized diagnoser state can
be recoveredunder the communication protocol described in Algorithm
DDC in the previ-ous section. We verify the correctness of the
recovery method by showing thatit reconstructs the centralized
diagnoser state after each observable event in thegiven observed
sequence of events.
An iteration of Algorithm DDC is the completion of the algorithm
for anobservable event in the sequence. Let x and x be the
diagnoser states of Nd,1and Nd,2, respectively, at the end of an
iteration. We denote by xi the ith rowof diagnoser state x.
Similarly, we denote by xj the jth row of diagnoser statex. Let
lxim and l
xjm denote the message labels of xi and xj , and lxif and l
xjf denote
the fault labels of xi and xj , respectively. We denote by di
and dj the states of(N1, Σ1, l1, x01) and (N2, Σ2, l2, x02) in rows
xi and xj , respectively. Combiningall these notations we write xi
= dilxif l
xim and xj = dj l
xjf l
xjm . If the number of
rows of x and x are r and r, respectively, then we define the
set Merge(x, x) asfollows
Merge(x, x) = ∪1≤i≤r ∪1≤j≤r {[didj,P2−Pc |lxif lxjf ] : lxim =
lxjm }. (33)
Algorithm DDC results in xi,Pc = xj,Pc when lxim = l
xjm . Therefore Merge(x, x)
can equivalently be defined as follows
Merge(x, x) = ∪1≤i≤r ∪1≤j≤r {[di,P1−Pcdj |lxif lxjf ] : lxim =
lxjm }. (34)
We state the main result of this paper in the following theorem.
The theoremclaims that the centralized diagnoser state can be
recovered from the diagnoserstates of the distributed diagnosers by
merging these diagnoser states as definedin (33) or (34).
-
suo
f1 a
suo
a
a a
p1
t1
t4
t8
t2
t5
t3
t6
p4
p7
p11
p2
p5
p8
p3
p6
p9
suo
f1 a
suo
a
e
h
a
e
f2
h
a
e
g
e
f2
g
p1
t1
t4
t8
t12
t16
t2
t5
t9
t13
t17
t3
t6
t10
t14
t7
t11
t15
p4
p7
p11
p15
p2
p5
p8
p12
p16
p3
p6
p9
p13
p10
p14
e
h
e
f2
h
e
g
e
f2
g
t12
t16
t9
t13
t17
t10
t14
t7
t11
t15
p11
p15
p8
p12
p16
p3
p6p9
p13 p10
p14
N1
N
N2
Fig. 4. Petri net graphs N , N1 and N2
Theorem 1. Given the system (N , Σ, l, x0), its diagnoser Nd,
and the eventpartition ΠΣ, let (N1, Σ1, l1, x01) and (N2, Σ2, l2,
x02) be the resulting place-bordered Petri nets, and Nd,1 and Nd,2
be the corresponding diagnosers, respec-tively. Given a sequence of
observable events σo0σo1 . . . σon such that xi+1 =fd(xi, σoi) for
all i where 0 ≤ i ≤ n and xi is the diagnoser state of Nd, ifxi1
and x
i2 are the diagnoser states of Nd,1 and Nd,2, respectively, at
the end of
the iteration of Algorithm DDC for σoi, then the set of rows of
xi is equal toMerge(xi1, x
i2).
-
Proof (of Theorem). The proof is by induction. We first show
that mergingthe initial diagnoser states of the distributed
diagnosers results in the initialdiagnoser state of the centralized
diagnoser. The induction hypothesis statesthat merging the
diagnoser states xi1 and x
i2 of the distributed diagnosers results
in the centralized diagnoser state xi. In the induction step we
prove that mergingthe diagnoser states xi+11 and x
i+12 of the distributed diagnosers results in the
centralized diagnoser state xi+1 using the induction
hypothesis.Induction Base. Merge(x01, x
02) is equal to the set of rows of x
0.
Proof (of Induction Base). The initial diagnoser state x0 is the
listing of theelements in the set UR(x0l0) where l0 is “normal”. If
(ssf ) is a row of x
0 then
s = x0 + W ∗(t), (35)lsf = LP (x0, l0, t), (36)
where t = t1t2 . . . t|t| ∈ Σ∗uo and W ∗(t) =∑|t|
m=1 W (tm).Since addition is column-wise (36) can be separated
into two equations as
follows
sP1 = x0,P1 + W∗P1(t) (37)
sP2 = x0,P2 + W∗P2(t) (38)
From (24) and (25), x0,P1 = x01 and x0,P2 = x02. Thus (sP1
lfsP1) and (sP2 lsP2f )
are rows in UR(x01lx01f ) and UR(x02lx02f ), respectively. By
definition x
01 and
x02 are the listings of the elements in the sets UR(x01lx01f )
and UR(x02l
x02f ),
respectively. Thus, (sP1 lfsP1) and (sP2 lsP2f ) are rows of
x
01 and x
02, respec-
tively. Conversely if (s′ls′
f ) and (s′′ls
′′f ) are rows of x
01 and x
02, respectively, then
(s′s′′P2−Pc ls′f l
s′′f ) is a row of x
0.
Induction Hypothesis. Merge(xi1, xi2) is equal to the set of
rows of x
i.Induction Step. Merge(xi+11 , x
i+12 ) is equal to the set of rows of x
i+1.
Proof (of Induction Step). We need to show that Merge(xi+11 ,
xi+12 ) is equal to
the set of rows of xi+1. This is done by showing inclusion in
both directions forthese two sets of rows. Without loss of
generality assume that σoi ∈ Σ1.
(⇐) If (slsf ) is a row of xi+1, then there exist a row
(s′ls′
f ) of xi+11 and a row
(s′′ls′′
f ) of xi+12 such that l
s′m = ls
′′m , s = s′s′′P2−Pc = s
′P1−Pcs
′′ and lsf = ls′f l
s′′f ,
where lsf , ls′f and lfs
′′ are the fault labels of s, s′ and s′′, respectively, and
ls′
m
and ls′′
m are the message labels of s′ and s′′, respectively.If (slsf )
is a row of x
i+1, then (slsf ) ∈ ∪z∈|S(xi,σoi)|UR(z) [cf. (17)]. Thus,(slsf )
∈ S(xi, σoi) or there exist (vlvf ) ∈ S(xi, σoi) and t = t1t2 . . .
t|t| ∈ Σ∗uo suchthat
s = v + W ∗(t) and lsf = LP (v, lvf , t), (39)
where W ∗(t) =∑|t|
m=1 W (tm). The first case can be thought of as a special caseof
the second. When s is equal to v, W ∗(t) = 0. In this case, lsf =
l
vf . Then
-
(slsf ) ∈ S(xi, σoi) since (slsf ) = (vlvf ) and (vlvf ) ∈ S(xi,
σoi). Thus, we will writethe proof for the second case only.
If (vlvf ) ∈ S(xi, σoi), then there exists a row (dldf ) of xi
such that there existsa transition t ∈ B(xi, σoi)[cf. (15)]
feasible from d, and
v = d + W (t) and lvf = ldf . (40)
From the induction hypothesis, d = dP1dP2−Pc and ldf = l
dP1f l
dP2f where (dP1 l
dP1f )
is a row of xi1 and (dP2 ldP2f ) is a row of x
i2, and l
dP1m = l
dP2m .
Since addition of vectors is column-wise, from (40) we get
vP1 = dP1 + WP1(t) (41)
Note that since l(t) ∈ Σ1, t ∈ T1. Thus, t is feasible from dP1
in (N1, Σ1, l1, x01).Then, (vP1 l
vP1f ) ∈ S(xi1, σoi).
Consider (39); since addition of vectors is column-wise we
get
sP1 = vP1 + W∗P1(t) (42)
WPc(tm) = 0 for all tm in t. Thus, W∗Pc
(t) = 0. Then, (sP1 lsP1f ) is a row
of xi+11 since (sP1 lsP1f ) ∈ UR(vP1 l
vP1f ) and (vP1 l
vP1f ) ∈ S(xi1, σoi). (sP1 l
sP1f ) ∈
UR(vP1 lvP1f ) since if there exists some tm in t where 1 ≤ m ≤
such that l(t) ∈
Σuo,2, then WP1(tm) = 0. The message label lsP1m of (sP1 l
sP1f ) is given as
lsP1m = l
vP1m = [l
dP1m , WPc(t)] (43)
if for some t ∈ B(xi1, σoi), WPc(t) 6= 0, i.e., a message is
sent. Otherwise, lsP1m =ldP1m , i.e. no message is sent. Note that
the transitions labeled with unobservableevents do not change the
markings of the common places.
We now show that sP2 lsP2f is a row of x
i+12 and its message label l
sP2m is equal
to the message label of sP1 . Similar to (41) and (42) we can
write
vP2 = dP2 + WP2(t) (44)
andsP2 = vP2 + W
∗P2(t) (45)
If no message is sent, then WPc(t) = 0 for every t ∈ B(xi1,
σoi). WP2−Pc(t) = 0since t ∈ Σ1. Thus WP2(t) = 0 and from (44) we
get vP2 = dP2 . If we substitutethis result into (45) we see that
sP2 l
sP2f ∈ UR(dP2 l
dP2f ). Since dP2 l
dP2f is a row
of xi2 and by definition (17) each element of UR(dP2 ldP2f ) is
a row of x
i2, sP2 l
sP2f
is a row of xi2. By Algorithm DDC, when no message is sent,
xi+12 = x
i2.
Thus, sP2 lsP2f is a row of x
i+12 . The message label of sP2 is equal to l
dP2m . Since
ldP1m = l
dP2m , the message label l
sP2m = l
dP1m . Since no message is sent, l
sP1m = l
dP1m
and lsP1m = lsP2m .
-
If a message is sent, then for some t ∈ B(xi1, σoi) WPc(t) 6= 0.
If we substitute(44) into (45) we get
sP2 = dP2 + WP2(t) + W∗P2(t) (46)
Since t ∈ T1, WP2−Pc(t) = 0. It was also shown that W ∗Pc(t) =
0. Then, (46) canbe rewritten as
sP2 = dP2 + [0, W∗P2−Pc(t)]︸ ︷︷ ︸
d
+[WPc(t), 0] (47)
Let ldf denote the fault label of d. Then, dldf ∈ UR(dP2) and
the message label ldm
of d is equal to the message label ldP2m of dP2 . Since ldP1m =
l
dP2m , then ldm = l
dP1m .
By Algorithm DDC, the message sent is MLabel(xi+11 ). Since sP1
lsP1f is
a row of xi+11 . There exists row k of MLabel(xi+11 ) which is
equal to l
sP1m .
Let messagek denote row k of this message; then from (43) we
extract thatmessage prefixk = l
dP1m and message presentk = WPc(t). Thus, we get message prefixk
=
ldm. This results in d ∈ M in Algorithm DDC. If d ∈ M , then
there existsd̃ ∈ M such that
d̃Pc = dPc + message presentk = dPc + WPc(t), d̃P2−Pc = dP2−Pc
(48)
andld̃m = [l
dm, WPc(t)]. (49)
From (47) and (48) we find that d̃ = sP2 and ld̃m = l
sP2m . From (43) and (49) we
find that lsP1m = ld̃m. Thus, lsP1m = l
sP2m .
As a result we showed that given that (slsf ) is a row of xi+1,
(sP1 l
sP1f ) and
(sP2 lsP2f ) are rows of x
i+11 and x
i+12 , respectively, and l
sP1m = l
sP2m . Thus, defining
s′ = sP1 , ls′f = l
sP1f , s
′′ = sP2 and ls′′f = l
sP2f concludes the proof of one direction
of inclusion.(⇒) If (s′ls′f ) and (s′′ls
′′f ) are rows of x
i+11 and x
i+12 , respectively, and l
s′m = l
s′′m ,
then there exists a row (slsf ) of xi+1 such that s = s′s′′P2−Pc
= s
′P1−Pcs
′′ andlsf = l
s′f lfs
′′, where lsf , ls′f and l
s′′f are the fault labels of s, s
′ and s′′, respectively,and ls
′m and l
s′′m are the message labels of s
′ and s′′, respectively.The proof of the above statement is
similar to the proof of the converse
statement proved in detail above, when the steps are followed in
reverse order.First we find the rows of xi1 and x
i2 from which (s
′ls′
f ) and (s′′ls
′′f ) are reached,
and using the induction hypothesis we show that the merging of
these rows formsa row of xi. Then we find the row in xi+1 when the
transitions in B(xi1, σoi) orΣuo are fired, and show that it is the
merging of (s′ls
′f ) and (s
′′ls′′
f ). The detailsof this proof are omitted here.
This completes the proof of the induction step and the proof of
the theorem.ut
-
Example 3. We consider Example 1 and Example 2 since they give
the central-ized and distributed diagnoser states, respectively,
for the event sequence “aeh”.
Note that merging x01 and x02 in (28) results in x
0 given in (19). Similarly,merging x11 and x
12 in (29) results in x
1 given in (20); merging x21 and x22 in (30)
and (31), respectively, results in x2 given in (21); merging x31
and x32 in (32)
results in x3 given in (22). Observe that x31 in (32) contains
state estimates forN1 that are not present in the centralized
diagnoser state given in (22). Thisoverestimation is due to the use
of a partial system model, namely, N1 by Nd,1.However, these
overestimates disappear during the merge operation.
Remark : Each time the merge operation is invoked, we could send
each di-agnoser their part of the merged diagnoser state and they
could use these partsas their new initial states. This resetting of
the initial states allows the reset ofthe message labels as well,
thus preventing their unbounded growth.
4 Conclusion
The Petri net diagnosers introduced in this work are different
from the diag-noser automata in [4] in the sense that they perform
on-line fault diagnosis onthe same transition structure as the
system model, namely the Petri net graphof the system. This feature
can be exploited to allow for modular/distributedimplementations of
diagnosis algorithms, as was done in Section 3 based on
adecomposition of the Petri net graph of the system into
place-bordered subnets.This kind of modular decomposition often
occurs naturally in the modelling ofcomplex systems; it would be
more difficult to achieve using automata models.In the future work,
it might be worthwhile to investigate other types of decom-position
of Petri nets.
For the sake of generality, our presentation of Algorithm DDC
focused onthe main steps involved and on its correctness proof.
Several improvements to itare possible in order to achieve more
efficient implementations from the point ofview of the
communications required between the diagnosers. As was mentionedin
Section 3, message labels can, and should, be truncated when all
the rowsin a message label share a common prefix. It may be
possible to determineupper bounds on the size of message labels
based on the structure of the Petrinet. Another possible
improvement is to attempt to reduce the frequency ofcommunications.
For instance, if the connectivity between the place-borderedsubnets
is “one-way”, in the sense that one subnet only consumes tokens
fromcommon places but never puts tokens in them, and vice-versa for
the other, thencommunication need only be one-way and in fact could
possibly be delayed.In general, it may be possible to delay
communications if the diagnosers usetimestamps and their local
clocks are synchronized. Detailed investigations ofsuch
improvements constitute interesting topics for future research.
-
References
1. Pouliezos, A.D., Stavrakakis, G.S.: Real time fault
monitoring of industrial pro-cesses. Kluwer Academic Publishers
(1994)
2. Cassandras, C.G., Lafortune, S.: Introduction to Discrete
Event Systems. KluwerAcademic Publishers (1999)
3. Lafortune, S., Teneketzis, D., Sampath, M., Sengupta, R.,
Sinnamohideen, K.:Failure diagnosis of dynamic systems: An approach
based on discrete event systems.In: Proc. 2001 American Control
Conf. (2001) 2058–2071
4. Sampath, M., Sengupta, R., Lafortune, S., Sinnamohideen, K.,
Teneketzis, D.:Diagnosability of discrete event systems. IEEE
Trans. Automatic Control 40 (1995)1555–1575
5. Sampath, M., Sengupta, R., Lafortune, S., Sinnamohideen, K.,
Teneketzis, D.:Failure diagnosis using discrete event models. IEEE
Trans. Control Systems Tech-nology 4 (1996) 105–124
6. Sampath, M.: Discrete event systems based diagnostics for a
variable air volumeterminal box application. Technical report,
Advanced Development Team, JohnsonControls, Inc. (1995)
7. Şimşek, H.T., Sengupta, R., Yovine, S., Eskafi, F.: Fault
diagnosis for intra-platooncommunication. In: Proc. 38th IEEE Conf.
on Decision and Control. (1999)
8. Sengupta, R.: Discrete-event diagnostics of automated
vehicles and highways. In:Proc. 2001 American Control Conf.
(2001)
9. Sampath, M., Godambe, A., Jackson, E., Mallow, E.: Combining
qualitative andquantitative reasoning - a hybrid approach to
failure diagnosis of industrial sys-tems. In: IFAC SafeProcess
2000. (2000) 494–501
10. Sampath, M.: A hybrid approach to failure diagnosis of
industrial systems. In:Proc. 2001 American Control Conf. (2001)
11. Garćıa, E., Morant, F., Blasco-Giménez, R., Quiles, E.:
Centralized modular di-agnosis and the phenomenon of coupling. In
Silva, M., Giua, A., Colom, J., eds.:Proceedings of the 6th
International Workshop on Discrete Event Systems, IEEEComputer
Society (2002) 161–168
12. Chehaibar, G.: Replacements of Open Interface Subnets and
Stable State Trans-formation Equivalance, Springer-Verlag (1993)
1–25
13. Vogler, W.: Modular Construction and Partial Order Semantics
of Petri Nets(Lecture Notes in Computer Science, vol. 625).
Springer-Verlag (1998)
14. Aghasaryan, A., Fabre, E., Benveniste, A., Boubour, R.,
Jard, C.: Fault detectionand diagnosis in distributed systems: An
approach by partially stochastic petrinets. Journal of Discrete
Event Dynamical Systems Vol. 8(2) (1998) 203–231
15. Benveniste, A., Fabre, E., Jard, C., Haar, S.: Diagnosis of
asynchronous discreteevent systems, a net unfolding approach.
Technical Report Research Report 1456,Irisa (2002)
16. Hadjicostis, C.N., Verghese, G.C.: Monitoring Discrete Event
Systems Using PetriNet Embeddings. Application and Theory of Petri
Nets 1999 (Series Lecture Notesin Computer Science, vol. 1639)
(1999) 188–207
17. Sifakis, J.: Realization of fault-tolerant systems by coding
petri nets. Journal ofDesign Automation and Fault-Tolerant
Computing Vol. 3 (1979) 93–107
18. Giua, A.: Petri net state estimators based on event
observation. IEEE 36th Int.Conf. on Decision and Control (1997)
4086–4091
19. Desel, J., Esparza, J.: Free Choice Petri Nets. Cambridge
University Press (1995)



![CS-550: Distributed File Systems [SiS]1 Resource Management in Distributed Systems: Distributed File Systems](https://img.pdfslide.net/doc/110x75/56649d015503460f949d3357/cs-550-distributed-file-systems-sis1-resource-management-in-distributed.jpg)























