Embed Size (px)
Citation preview
DR. HENRY ASTLEYAssistant Professor of Polymer Science and BiologyBiomechanics of Animal Locomotion
T
H
E
U
N
I
V
E
R
S
I
T
Y
O
F
A
K
R
O
N
Departments ofPolymer Science and Biology The University of Akron, OH
330-972-8192 [email protected]
http://gozips.uakron.edu/~hastley/
Biography: Henry Astley is a comparative biomechanist and herpetologist, with a focus onthe control and mechanics of locomotion. Previously, he worked on sidewinding snake locomotion as a postdoc in Dan Goldman’s lab at Georgia Tech. He did his PhD at Brown University in Tom Roberts’ lab, working on elastic energy storage and muscle evolution in frog jumping, and his MS and BS at University of Cincinnati in Bruce Jayne’s lab, working on arboreal snake locomotion. He also has a BS in Aerospace Engineering from Florida Institute of Technology.
The Astley Laboratory studies a wide range of locomotor behaviors in animals, using these insights to guide construction of biomimetic robots, which can in turn be used to test hypotheses about form-function relationships in biology. Our work focuses on the interactions between musculo-skeletal mechanics, neuromechanical control, and enviornmental interactions, with three focus areas:
Snake Locomotion - In spite of their lack of limbs, snakes are capable of moving through diverse habitats, and are particularly skilled at navigating cluttered and complex terrain which is inaccessible to limbed species of similar size. We are interested in the mechanics and control of their diverse modes of locomotion, and in building biomimetic snake robots.
Frog Jumping - Frogs are capable of amazing jumps, powered by elastic tendons in their ankles which function as a "catapult mechanism". However, we are only beginning to understand the mechanics and control of this system, and how animals control powerful accelerations.
Early Tetrapod Movement - The first vertebrates to colonize land faced new mechanical challenges with bodies adapted to the water. We study how those first steps onto land took place, and how preceding behaviors such as underwater walking may have provided crucial early adaptations later co-opted to life on land.
Research Interests:
Unique Laboratory Facilities: Motion capture system High-speed videography (color) in vitro muscle physiology system Robotics - construction & control Electromyography SonomicrometryInverse dynamics analysis3D printing with flexible materials
Recent Publications/Patents: http://gozips.uakron.edu/~hastley/Publications.html
Awards/Accomplishments: 2013 John G. Peterson Pre-doctoral Fellow, Brown University
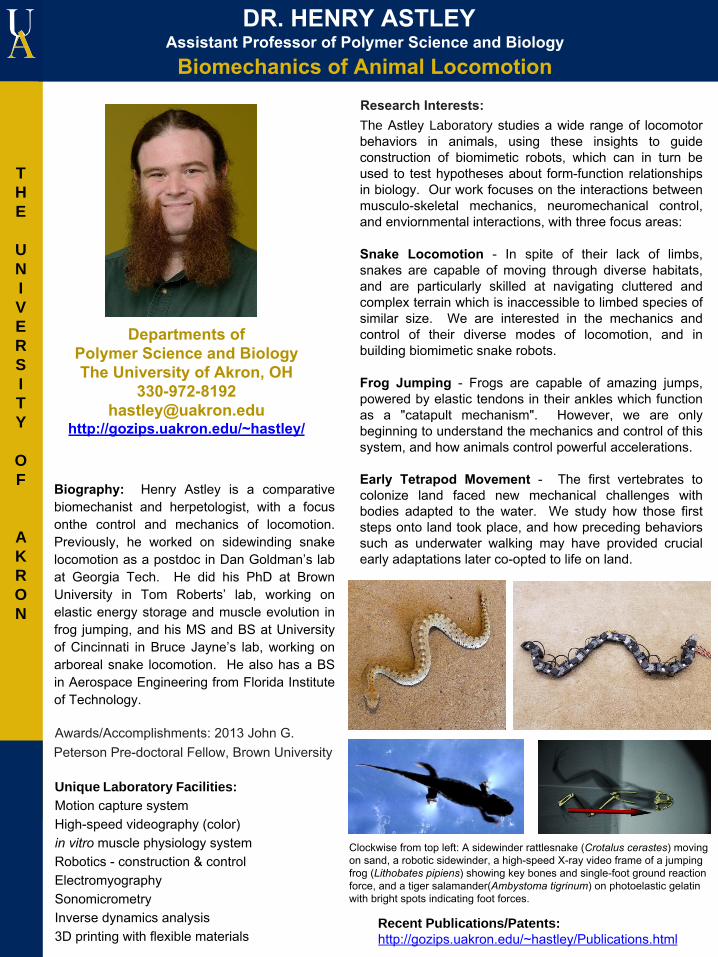
Clockwise from top left: A sidewinder rattlesnake (Crotalus cerastes) movingon sand, a robotic sidewinder, a high-speed X-ray video frame of a jumping frog (Lithobates pipiens) showing key bones and single-foot ground reaction force, and a tiger salamander(Ambystoma tigrinum) on photoelastic gelatin with bright spots indicating foot forces.