Embed Size (px)
Citation preview

1
Dynamic Model for Full-Converter Wind Turbines employing Permanent Magnet
Alternators

2
INTRODUCTION
Full converter wind turbine (FCWT) employing a permanent magnet alternator (PMA) becomes very popular due to the combined advantage of (FCWT) and (PMA).
Advantages:
FCWT Effectively decouples the generator from the grid,
improving fault response. It allows the turbine to operate over a wide speed range,
leading to improved power extraction from the wind.

3
PMA No rotor windings, reducing excitation losses and
reducing the size of the generating unit. Absence of rotor slip rings reduces maintenance
requirements. Due to the above advantage the popularity of
FCWTs has increased and led to a search for reliable models to evaluate the impacts of integrating these FCWTs into the existing grid.

4
MODEL DEVELOPMENTWind turbines can be thought of as a collection of
subsystems which can be modeled individually.It consists:
A. Aerodynamic model for rotorB. Mechanical two-mass model for drive trainC. Reference power calculation blockD. Pitch controllerE. Permanent magnet Alternator (PMA) modelF. Rectifier and buck/boost converter models (for DC link
voltage control)G. Inverter model(Current controlled) H. Unit transformer and grid representation

5
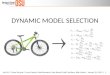
Fig. 1. Full Converter Wind Turbine Schematic

6
A. AERODYNAMIC MODEL FOR ROTORConsists of three subsystem : Tip-speed ratio calculation(λr), rotor power
coefficient (Cp ) calculation, and aerodynamic torque calculation.
where ωrot is the rotor angular speed in rad/s, R is the rotor radius in m and Vwind is the wind speed in m/s.

7
A look-up table method is used to compute the value for Cp where λr and pitch angle (β) are the inputs provided.

8
B. MECHANICAL TWO-MASS MODEL FOR DRIVE TRAIN
The drive train of a wind turbine generally consists of turbine rotor, low speed rotor shaft, gearbox with transmission ratio α, high speed shaft of the generator and the generator itself.
Two mass model is used to represent the drive train.

9
C. REFERENCE POWER CALCULATION BLOCK
The reference power calculation is based on user defined wind speed, as shown below
Fig. 4. Reference power calculation block

10
D. PITCH CONTROLLER The pitch control block (Fig. 6) changes blade pitch angle
at higher than rated wind speeds to spill excess power. Thus power output is maintained at rated value even
though wind speed exceeds rated wind speed. In this particular implementation, reference power is per unitized and converted to reference speed based on the curve shown on look-up table in Fig. 5,
Fig. 5. Look-up table for converting reference power to reference speed

11
Fig. 6. Pitch controller
A built-in squirrel cage or wound rotor induction machine model available in any dynamic simulation software is used for the model. The machine is rated at 2 MVA, 3.6 kV at 60 Hz.
E. Permanent magnet alternator

12
F. AC TO DC CONVERSION USING RECTIFIER AND BUCK-BOOST CONVERTER A 3-phase diode bridge converts PMA output to a
variable DC voltage. The buck-boost converter maintains the DC link at a constant 3.6 kV.
The DC link capacitor is modeled as two identical 10000 μF capacitors with ground in between. The value of inductance employed in the buck-boost converter is 10000 μH
The controller for the buck-boost converter is shown below. This controller is based on PI control; error between the desired voltage set point (3.6 kV here) and the actual voltage drives the PI controller and generates a duty signal output. The duty is compared to a triangle wave to generate firing signals for the IGBT in the buck/boost converter.

13
G. DC TO AC CONVERSION USING CURRENT-CONTROLLED INVERTER
The inverter implemented here (controls shown in Fig. 8) is a typical three-phase six-IGBT current controlled inverter. It is capable of decoupling real and reactive power control, since the controller design for this inverter is based on flux-vector theory.

14
H. UNIT TRANSFORMER AND GRID REPRESENTATION
The unit transformer and grid are both modeled using in-built blocks supplied by PSCAD/EMTDC. The unit trans-former is a wye-delta 2MVA transformer with a primary voltage of 34.5 kV and a secondary voltage of 0.6 kV, and a per unit leakage reactance of 0.1 p.u.

15
MODEL TESTING
The model testing phase is essential to evaluate the capabilities of the model. The model testing phase had three main objectives:
To verify that desired wind turbine power curve was achieved
To demonstrate independent real and reactive power control
To demonstrate pitch controller action To evaluate real and reactive power
response during voltage sag on the grid (test of dynamic response)

16
A. POWER CURVE The sharp edges are smoothened by adjusting Rated
power is thus achieved at 14 m/s rather than 13 m/s.

17
B. INDEPENDENT REAL AND REACTIVE POWER CONTROL In order to test if independent real and reactive power
control has been achieved, two tests were carried out: real power drop and reactive power rise.

18

19
C. PITCH CONTROL A test was devised to evaluate pitch
controller action. The wind speed changed from 11 m/s to 15 m/s at t=25s.

20
D. REAL AND REACTIVE POWER RESPONSE DURING VOLTAGE SAG ON THE GRID
The wind turbine was operated with a constant wind speed (15 m/s) so that the pitch controller is active.
A voltage sag on the grid was simulated, and the real and reactive power response of the wind turbine was observed.
The intent of the test is to show that the model does indeed respond to events occurring in the dynamic timescale and that the response of the machine to this event is realistic. And result shows that the model does indeed respond to the grid event as expected.

21

22
CONCLUSION
The development and testing of a full converter
wind turbine employing a permanent magnet alternator has been presented here.
This model is unique in that it employs a buck-boost converter to control DC link voltage.
All the desired output are achieved from the tests. An example of the model’s dynamic response has also been provided.
In the future, the model will be used as a platform to model various controls such as those needed to
provide LVRT(low voltage ride through) and inertial support

23
Thank you for your attention