Embed Size (px)
Citation preview

ECEN 5807 : Introduction 1
ECEN 5807Modeling and Control of Power Electronic Systems
Instructor: Prof. Bob EricksonOffice telephone: (303) 492-7003
Fax: (303) 492-2758
Email: [email protected] web page
http://ece.colorado.edu/~ecen5807
TextbookErickson and Maksimovic, Fundamentals of Power Electronics,
second edition. Springer Science+Business, 2001.ISBN: 0-7923-7270-0http://ece.colorado.edu/~pwrelect/book/SecEd.html
Online course lectureshttp://engineeringonline.colorado.edu/TegrityUtils/
getCourseRSS.asp?courseId=ECEN5807091

ECEN5807, Spring 2007
Power Electronics Program at CU Boulder
ECEN5797Introduction to Power
Electronics
ECEN5807Modeling and Control of PE
Systems
ECEN5817Resonant and Soft-Switching
Techniques in PE
ECEN5517Power Electronics Lab
Fall semesters
Spring semesters
Alternate Spring semesters (2008)
Alternate Spring semesters (2007) Professional Certificate in
Power Electronics

ECEN 5807 : Introduction 2
Grading
Homework: 50%
Midterm exam: 17%Final exam: 33%

ECEN 5807 : Introduction 3
Required Software
Available to local students in ECE teaching labs (power electronics lab, circuits lab)
Spice simulatorFree version of Pspice or LTspice is sufficient
MATLAB/SimulinkStudent version is sufficientCan be purchased online or through CU Bookstore

ECEN 5807 : Introduction 4
Topics
1. Averaged switch modeling and simulation
CCM, DCM, and other examples. Computer simulation
2. Techniques of design-oriented analysis, with switching converter applications
Middlebrook s feedback and extra element theoremsInput filter designWriting complicated transfer functions by inspection
3. Current programmed control of PWM converters
4. Introduction to digital control of PWM converters
5. Rectifiers
• Rectifier harmonics in power systems
• Low harmonic PWM rectifiers and power factor correctors

ECEN 5807 : Introduction 5
1. Averaged switch modeling and simulation
Section 7.4, Chapter 11, and Appendix B
This approach has recently become quite popular
Can be applied to a wide variety of converters
We will use it to model CCM, DCM, and current programmed converters
Also useful for incorporating switching loss into ac model of CCM converters
Computer simulation of small-signal transfer functions
Objectives of simulation
PSPICE examples

ECEN5807, Spring 2007

ECEN 5807 : Introduction 6
2. Techniques of Design-Oriented Analysis
Chapter 10, Appendix C, and supplementary notes on webNull double injection methods for analysis of complex analog systems
Converter applicationsInput filter designExact analysis of a fifth-order converter system
Middlebrook s extra element theoremHow to easily determine the effect of an extra element on a circuit transfer
function, without starting the analysis all over again
The n extra element theoremHow to write complicated transfer functions by inspection, in rational form
Middlebrook s feedback theoremHow to easily construct the loop gain and closed-loop transfer functions of a
complex feedback circuit

ECEN 5807 : Introduction 7
Middlebrook’s Extra Element Theorem
Appendix C
How a given transfer function is modified by addition of an element:
vout(s)vin(s)
= G(s)Z(s)
1 +ZN(s)Z(s)
1 +ZD(s)Z(s)
Simple methods to find ZN(s) and ZD(s)
How to design circuit so that new element doesn t change anything:
Z( j ) > ZN( j )
Z( j ) > ZD( j )
Design oriented result: construct Bode plots of above impedances

ECEN 5807 : Introduction 8
Input filter design
• Filter can seriously degrade converter control system behavior
• Use extra element theorem to derive conditions which ensure that converter dynamics are not affected by input filter
• Must design input filter having adequate damping
+–
Inputfilter
Converter
T(s)
Controller
vgZo(s) Zi(s)
H(s)
d
v
f
Gvd Gvd
0˚
– 360˚
– 540˚
0 dB
– 10 dB
20 dB
30 dB
100 Hz
40 dB
1 kHz 10 kHz
– 180˚
10 dB
Gvd
Gvd

ECEN 5807 : Introduction 9
Design of damped input filters that don’t degrade converter transfer functions
-20 dB
-10 dB
0 dB
10 dB
20 dB
1 kHz 10 kHz 100 kHz
Section 1alone
Cascadedsections 1 and 2
30 dB
ZN ZD
fo
+–vg
L1
n1L1R1
C1
L2
n2L2R2
C2
6.9 F
31.2 H
15.6 H1.9 0.65 2.9 H
5.8 H
11.7 F
Design criteria derived via Extra Element theorem:
Two-section damped input filter design:
Z( j ) > ZN( j )
Z( j ) > ZD( j )

ECEN 5807 : Introduction 10
Write the line-to-output transfer functionby inspection
+–
+–
L
RC
1 : D D' : 1Lf
RfCf
Cb
vg(t) I d(t)
(Vg – V)d (t)
I d(t)
Solution: use n extra element theorem
Example: buck-boost with input filter

ECEN 5807 : Introduction 11
3. Current Programmed Control
+–
Buck converter
Current-programmed controller
Rvg(t)
is(t)
+
v(t)
–
iL(t)
Q1
L
CD1
+
–
Analogcomparator
Latch
Ts0
S
R
Q
Clock
is(t)
Rf
Measureswitch
current
is(t)Rf
Controlinput
ic(t)Rf
–+
vref
v(t)Compensator
Conventional output voltage controller
• Chapter 12
• A very popular method for controlling PWM converters
• Transistor turns off when its current is(t) is equal to the control input ic(t)
• Simpler dynamics, more robust compensator
Switchcurrentis(t)
Control signalic(t)
m1
t0 dTs Ts
on offTransistor
status:
Clock turnstransistor on
Comparator turnstransistor off

ECEN 5807 : Introduction 12
Effect of current programming on transfer functionsBuck converter example
Gvd
Gvd
f
0˚
–90˚
–180˚
G
–20 dB
–40 dB
0 dB
20 dB
40 dB
10 Hz 100 Hz 10 kHz 100 kHz1 kHz
G
–60 dB
Gvc
Gvc
21
345
CCM-DCM1
+–
+–
35 H
100 F
Vg
12 V
L
C R
vc
+
v
–
iLOAD
CPM
control current 1 2
d
+–
+–
+–
iL RL1 2 3 4
d
Rf iL v(1)–v(3) v(3)
0.05
10
Rf = 1 fs = 200 kHzL = 35 Va = 0.6 V
Xcpm
Xswitch
fs = 200 kHzL = 35
EiE1 E2
Comparison of control-to-output transfer functions
Averaged switch model used in PSPICE simulations

CoPEC
5ECEN5807
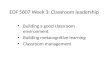
Digitally Controlled Buck ConverterSimulink Model
• The buck converterblock is the same as in the continuous-time system
• Note the parts of the system that model the digital controller including:
– A/D converter
– Discrete-time compensator, and
– Digital PWM
Digital PWM
Discrete-time compensator
A/D converter

ECEN 5807 : Introduction 13
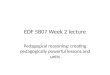
4. Modern rectifiers, power system harmonics, and low harmonic rectifiers
100%91%
73%
52%
32%
19% 15% 15% 13% 9%
0%
20%
40%
60%
80%
100%
1 3 5 7 9 11 13 15 17 19
Harmonic number
Har
mon
ic a
mpl
itud
e,pe
rcen
t of f
unda
men
tal
THD = 136%Distortion factor = 59%

ECEN 5807 : Introduction 14
The Ideal Rectifier
+–
1 : M(D)
Vg R
+
V
–
Re(vcontrol)
+
–
vac(t)
iac(t)
vcontrol
v(t)
i(t)
+
–
p(t) = vac2 / Re
Ideal rectifier (LFR)
acinput
dcoutput
Modeling the basic functions of ideal converters
Dc-dc converter: dc transformer
Ac-dc rectifier: “loss-free resistor”

ECEN 5807 : Introduction 15
Controlling a dc-dc converterto behave as an ideal rectifier
1 : M(d(t))
dc-dc converter
controller
d(t)
Rvac(t)
iac(t)+
vg(t)
–
ig(t)
ig
vg
+
v(t)
–
i(t)
C
Controller varies d(t) as necessary, to cause ig(t) to be proportional to vg(t)

ECEN 5807 : Introduction 16
Next lecture
Begin with circuit averaging and averaged switch modeling
Assignment: Read Sections 7.4 and 7.5