Embed Size (px)
Citation preview


Human PowerThe technical journal of the
International Human-Powered VehicleAssociation
David Gordon Wilson, editor21 Winthrop Street
Winchester, MA 01890-2851, USAPhones: 617-729-2203 (home)
617-253-5121 (MIT)617-258-6149 (FAX)
Associate editorsToshio Kataoka, Japan
1-7-2-818 Hiranomiya-MachiHirano-ku, Osaka-shi, Japan 547
Theodor Schmidt, EuropeHoheweg 23
CH-3626 HunibachSwitzerland
Philip Thiel, watercraft4720 7th Avenue, NE
Seattle, WA 98105, USAIHPVA
P.O. Box 51255Indianapolis, IN 46251, USA
Phone: 317-876-9478Officers
Dave Kennedy, presidentAdam Englund, secretary
Bruce Rosenstiel, treasurerMarti Daily, exec. director
Paul MacCready, int'l presidentDoug Milliken, VP water
Glen Cole, VP landChris Roper, VP air
Matteo Martignoni, VP ATVTheodor Schmidt, VP hybrid power
Board membersAllan AbbottMarti DailyPeter ErnstChet Kyle
Gardner MartinGaylord HillDennis Taves
David Gordon Wilson
Human Power is published quarter-ly by the International Human-Powered Vehicle Assoc., Inc., a non-profit organization devoted to thestudy and application of human mus-cular potential to propel craft throughthe air, in and on the water and onland. Membership information isavailable by sending a self-addressedstamped business-sized envelope to theIHPVA address above.
Aditional copies of Human Powermay be purchased by members for$3.50 each, and by nonmembers for$5.00 each.
Material in Human Power is copy-righted by the IHPVA. Unless copy-righted also by the author(s), completear, ticles or respresentative excerptsmay be published elsewhere if fullcredit to the author(s) and the IHPVAis prominently given.
We are indebted to the authors, toMarti Daily and to Carolyn Stitson,whose dedicated help made this issuepossible. Dave Wilson
EditorialsInternationalism
The IHPVA is often criticized, per-haps justly, for not being sufficiently in-ternational. It is something we all haveto work on constantly. All the "higher"animals are territorial. Mankind easilyreverts to this pattern. As I write this,one of the US presidential challengers istrumpeting the call of "America First!" Ithought that that had disappeared in thethirties, a time when I remember my pri-mary schoolteacher hugging me and say-ing "Aren't we lucky to belong to thebest country on earth?" Pride in one'scountry and in one's group or team isgood so long as it doesn't lead to a dis-paragement of other countries andgroups. In Britain it was only slightlyhumourous to refer in those days to peo-ple unlucky enough not to have beenborn in Britain as "the great unwashed".A famous London Times headline is re-puted to have stated "Fog in the Chan-nel: Continent cut off' On my first visitto the USA I was entranced at the great-er interest in and acceptance of peopleof other countries than I saw in my owncountry. Foreigners were treated as peo-ple having habits that were no so muchstrange as interesting. At the same timewe were guilty of appalling racism. Wein the USA have apparently progressedin this area so far in the last thirty yearsthat we feel smug when confronted byoccasional renewed appearances ofthrowback movements proclaiming theneed to put the country, or some particu-
Cover design by Bruce adndmore
lar group, first. Other countries are alsohaving outbreaks of right-wing advocacyand violence. There is at present a high-ly embarrassing war of words between asmall minority of public people in Japanand the USA following a disastrous statevisit by the president and a group ofover-paid auto-company executives.(Why couldn't he have taken some ofour HPV pioneers - people we couldhave been proud of?)
These reflections are partly the re-sult of another act of kindness by a Japa-nese friend, in this case Akira Naito.We were very grateful to him for givingus his paper on HP helicopters in the lastissue. He was appreciative of the helpwe had given in editing the paper. Hehas just sent a stunningly beautiful pre-sentation of micro-origami - Parade ofCranes. (The folded-paper cranes havewingspans from about 25 mm to 0.7mm, too small when mounted on thepoints of sewing needles to be seen with-out a strong magnifying glass). I hopeto present it to a museum so that othersmay appreciate the craftsmanship andartistry.
I also feel, as I did when Ellen and Ivisited Japan, that in the face of manybeautiful and subtle courtesies shown tous we may have been perceived asclumsy, even boorish. (No one gave usany impression of perceiving us thatway). The point that I want to make isthat, if we are to make the IHPVA trulyinternational we have to keep on ourguard not to disparage any practices ofother groups, but to do our utmost tocommunicate. compete and cooperate infun and friendship.
Almost DTPHuman Power has relied in the past
for its production on a network of volun-teers and of one or two people who didprofessional work at well below marketrates. Drafts and diskettes were shuttledfrom place to place around the country,sometimes suffering some delays andalways surprising the editor somewhat. Iwould never know, until the final prod-uct turned up, exactly what the composi-tor had managed to squeeze in. For thisissue I'm trying the experiment of pro-ducing most of it myself. I've bought anew, fast PC, Microsoft Windows, DOS5.0, and Lotus Ami Pro. (If this soundslike an advertisement, let me reassureyou that it has a purpose. On the titlepage of my last book I printed "Pro-duced on Lotus Manuscript". When itdidn't work as advertised, Lotus was fan-tastic. It brought out a new version of
AS-/flLsfU Uaw p. 'in
p. 2 Human Power, fall & winter, 1991-2, vol. 913 & 9/4
In this issueEditorials Dave Wilson 2De-cavitator HPH Mark Drela,Marc Schafer & Matt Wall 3Letters to the editor 4Book reviews - Bob Stuart 5"Paddlewheels" - a correction 9In search of the massless flywheel
John S. Allen 10What is an HPV? Rob Price 13Cycling Science 3/3-4 - a review 18More on hull shapes for pedal power
Augustus Gast 19Advances in flow visualization
a review (Dave Wilson)20Wind + HP quadracycle Wally Flint 21Tricanter HPV energy modelling
J.KRaine & M.R.Amor26Richards' Ultimate Bicycle Book
a review (Dave Wilson)33Second int'l HP-submarine race
Cory Brandt 34l fluurlllrfuu Urt P. V/




DECAVITATORPxjrraPowered Hy'ofoil
27 October 91
0 1 2 3 4 5f
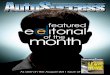
Figure 2 Three-view drawings of Decavitator, withoutfairings Drawn by Mark Drela
requires only a modest anaerobic effortfor a few seconds. Once flying on thehydrofoils, the vehicle can be sustainedby a fit cyclist at 9-10 knots / 4.5-5 m/swith aerobic power levels. A maximumeffort produces about 15 knots (7.5 m/s).Very High Speed. After unlocking asafety latch, the rider has the option topivot the large wing up and out of thewater, much like on one of the more re-cent Hydroped variants. The wing piv-oting is accomplished by acceleratingthe vehicle to at least 14 knots / 7 m/s (afairly hard effort), and then suddenly in-creasing the angle of attack of the entirewing system via the left lever, whichdrives the vehicle upwards. When theupper large wing breaks the water sur-face, rubber cords pivot it together withits mounting struts forward and up into astreamlined receptacle. The sequence isshown in figure 3. If the high power issustained, the vehicle then rapidly accel-erates on the remaining small wing to itsmaximum speed. The air propeller be-comes very efficient in this operatingmode.Pontoons
Each 17-foot / 5.2-m pontoon hull isshaped like a modern open-water wom-
en's racing kayak, with the deck loweredby about 2 inches / 50 mm. A similardesign is employed for the monohullHydroped vehicle. Molded compositeconstruction with a hard gelcoat finishgives very nearly the lowest drag attain-able. Although such exotic pontoonsmight seem frivolous on a hydrofoilboat, their low drag is in fact crucial tothe top-speed capability of the vehicle.Reducing pontoon drag permits highertakeoff speeds, which in turn permitsmaller wings and higher maximumspeeds.
Higher takeoff speeds also have theimportant effect of reducing wave dragassociated with the two-dimensionalwave train set up behind a lifting airfoil.This is quite independent of the "inverseground effect" mechanism of the freesurface which increases the induced dragof a 3-D lifting wing. As described inHoerner [4], the 2-D wave drag scalesinversely with the square of the chord-based Froude number and exponentiallywith the square of the depth-basedFroude number: C.avJCL2 = 0.5gc/V2
exp(-2gh/V2 ). This drag can dominate
the overall vehicle drag if large-chordwings are used at low takeoff speeds.An earlier version of the Decavitator hada rather large takeoff wing of 5", 127mm, average chord, and required exces-sive takeoff power due to the 2-D wave-drag mechanism - as clearly evidencedby the dramatic wave train set up behindthe wing. Reducing the wing area bynearly half gave a larger Froude number,and produced a large power reductiondespite the higher takeoff speed.A further advantage of higher takeoffspeeds is that it permits optimizing thepropeller for higher maximum speeds.One useful feature of a racing-kayak hullshape is that it retains its low-drag char-acteristics when partially raised out ofthe water. This permits a very gradualand low-power transition to the foil-borne mode, where the wings graduallylift the pontoons as the speed is in-creased. The use of a rider-adjustableangle of attack of the wings is also im-portant, as it permits the pontoons to re-main at a nearly-level, low-dragorientation at all speeds.
p. 6 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4__ - ------- - __ - ---- __ ____ -

Drive SystemThe rider is seated in a semi-recumbentposition on an adjustable seat with Ke-vlar cloth webbing. The pedals arelinked to the two-bladed 10-ft/ 3-m di-ameter air prop via a 1/4-in / 6-mm pitchstainless-steel chain-drive with a 2:1gear ratio. The propeller is of aminimum-induced-loss type, and hasbeen designed with algorithms similar tothose of Larrabee [5]. The propeller isdesigned to rotate at 250 rpm (125 rpmat the pedals) with maximum power at20 knots / 10 m/s. Its pitch can be dock-adjusted to optimize its performance atlower speeds and power levels, and tocompensate for wind direction. If theair/water density ratio is accounted for,the 10-ft / 3-m air propeller is equivalentto a 4-in / 100-mm-diameter water propin terms of the non-dimensional thrustcoefficient T, = 2T/rhoV2piR 2 , whichdetermines the induced or "slip" losses.At low takeoff speeds, the 10-ft air propgives high disk loadings (large Tc) andpoor efficiency relative to what could beobtained with an effectively larger 8-in /200-mm water prop, say. At speedsclose to 20 knots, however, T, becomessufficiently small to give efficienciesclose to 90% even at maximum power.This high efficiency is also due to theprop blade lift coefficients being reason-ably high at CL=0.6 (the Daedalus propairfoil is used), so that the blade-profile
lift-to-drag ratios are fairly good. Ordi-narily, a substantial blade CL at highspeeds result in a very large blade CL atlower speeds, stalling the blades andmaking transition to the hydrofoils diffi-cult. However, because of the high diskloading, the prop has a very substantialself-induction, or "slip", at low speeds(i.e. it draws air into itself). Togetherwith the modest takeoff-power require-ments of the low-drag pontoons, thisself-induction is sufficient to prevent theblades from stalling above speeds of 5-8knots / 2.5-4 m/s, depending on the geo-metric pitch setting.
Another very large advantage offeredby the air propeller is that the wingstruts do not need to enclose any drivesystem, and can be sized as small asmaterial-stress and buckling limitationspermit. Where it attaches to the smallwing, each strut has only a 1-in / 25-mmchord and a 0.15-in / 4-mm thickness. Astrut enclosing a chain or shaft transmit-ting 1 hp / 750 W would need to be farlarger. In addition, the exposed hardwareassociated with an air propeller has neg-ligible air drag, while a housing for anunderwater propeller mount typicallyhas a substantial drag penalty.Hydrofoil/Strut System
The hydrofoil system consists of twofully-submerged high-aspect-ratio wingsunder the rider, and two skimmer-actuated trim surfaces on the pontoon
bows. The larger 60x2.35-in /1520x60-mm (span x mean chord) wingis placed about 6 in / 150 mm below thepontoon bottoms, and the smaller30x1.4-in / 760x35-mm wing is placedanother 6 in / 150 mm lower. Each wingis supported by two slender struts placed26 in / 660 mm apart. The advantage ofusing two struts is that they do not needto carry significant bending moment,and hence can be made much smallerand have a lower overall drag than anequivalent single strut. Using two strutsalso greatly relieves bending momentson the wings, and permits much smallerwings to be used for a given material-stress limit. The wings employ a cus-tom 14%-thick airfoil which has beentailored for the operating Reynolds-number range of 150 000 - 400 000, us-ing the design principles and numericalsimulation methods employed for theDaedalus-wing airfoils [6, 7]. The struc-tural merit of the relatively thick airfoilallows smaller wing areas and less over-all drag than the 10-12%-thick airfoilsmore commonly employed at these lowReynolds numbers. The thick airfoil alsogives the rather wide usable lift-coefficient range 0:2 < CL < 1: 1, whichtranslates to low wing drag over a widerange of speeds. The ability of the largewing to perform well from 7 to 15 knotsis particularly important for the Decavi-tator as it is brought to its maximum-
/q-
(a) (b)
Figure 3 Transition sequencefrom double- to single-wing mode:ceptacle.
(c) (d)
the large wing pivots out of the water into a streamlined re-
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p.7

speed mode. Each of the two 9x0.85-in/ 230x22-mm front trim surfaces ismounted at the bottom of a slender rud-der in an inverted-T configuration. Eachrudder pivots on two axes in a gimbalmounted on the pontoon bow. The pitchaxis is controlled by a surface skimmercantilevered forward from the gimbal,while the steering axis is controlled bythe rider via cables linked to a right side-stick. The geometry of theskimmer/trim-surface mechanism is setup to lift the pontoon bow a few inchesoff the water surface at speeds over 6knots / 3 m/s. This height is firmly main-tained at all higher speeds, so that thevehicle is stabilized in depth and roll,and can pivot only in pitch about thepontoon bows. This pitching alters thewing's angle of attack relative to the wa-ter surface, so that for any given speedthe boat rapidly seeks the one uniquepitch attitude where the wing lift equalsthe vehicle weight. By altering wingangle of attack relative to the boat viathe left lever, the rider can therefore pre-cisely control the pitch attitude andhence the wing submergence depth. Atlow speeds, a large submergence depthis best to keep the large profile- andinduced-drag contributions of the freesurface in check. At high speeds, theviscous profile drag of the support strutsbecomes more dominant, and a verysmall submergence depth is optimal.The minimum workable depth is set bythe need to avoid ventilating the wing byan errant wave trough. Loss of lift due toventilation immediately drops the ve-hicle onto the pontoons. The pivoting ofthe large wing out of the water is an es-sential feature of the Decavitator's hy-drofoil system. Removal of the largewing reduces the total underwaterwetted area by a factor of three, giving aroughly proportional reduction in profiledrag. This is partially offset, however,by a substantial increase in the induceddrag due to the loss in total loaded span.Overall, a speed increase of about threeknots is realized for the same power lev-el.Construction
The Decavitator makes extensive useof structural and manufacturingtechnology developed at MIT in thecourse of numerous human-powered-aircraft projects. All underwater sur-faces are made via wet lay-up of solidcarbon/epoxy vacuum-bagged in femalemolds. The use of carbon fiber is essen-
tial since the small wing dimensionspush material stresses to the limit. Thesmall wing, for example, experiences100 000 psi / 690 MPa material stresswith a 140-lb / 64-kg rider at 2 g, andhence could not be safely built even outof aircraft-grade solid aluminum. Thestruts connecting the pontoons are oven-baked tubes made of pre-preg carbonfiber formed around aluminum man-drels. These are also highly stressed, andthe use of carbon fiber gives greater stif-fness as well as weight reductions ofmany pounds over equivalent aluminumtubes.
Each pontoon shell is a pre-pregglass/carbon/Nomex/glass sandwich, andwas baked inside a mold for an open-water women's kayak owned by Com-posite Engineering of West Concord,MA. The top of each pontoon is perma-nently sealed off with a glass/No-mex/glass deck. Internal plywoodbulkheads hold the strut-attachmentbolts. The fuselage frame supportingthe rider and drive system is constructedof thin-walled large-diameter aluminumtubes joined with Kevlar/epoxy lashingsin lieu of welds. Carbon-fiber tubes wererejected for the frame from durabilityconsiderations. In retrospect, a carbon-tube frame clearly would not have sur-vived the numerous modifications andgeneral abuse seen by the frame over thevehicle's three-year lifetime. The seat islikewise constructed of lashed thinwallaluminum tubing with a Kevlar clothwebbing, and employs adjustablemounts for different-sized riders. Thedrive system employs standard bicyclecranks and pedals, lightened somewhatby drilling. The chainwheels and sprock-ets for the 1/4-in- / 6-mm-pitch chainwere custom-made from high-strength2024-T4 aluminum plate bynumerically-controlled machining.
Each propeller blade is a hollow shellwith a hard Rohacell-foam shear web,bonded to an aluminum-tube root stub.The shell surface is a Kevlar/Roha-cell/Kevlar sandwich, laid-up wet andvacuum-bagged in a female mold.Carbon-fiber rovings are incorporatedinto the shell sandwich for bendingstrength. The propeller shaft is a thin-walled large-diameter aluminum tube.Further developments
Possibilities for further increasing theDecavitator's performance include thefollowing.
Smaller takeoff wing. Since the effortrequired to lift the pontoons off the wa-ter is quite modest, the area of the largewing could be decreased somewhat. Theareas of the front trim surfaces could bedecreased proportionately as well. Thereduction in wetted area would reducethe considerable effort needed to achievesufficient speed for the transition to thesingle-wing mode. The rider would thenhave more energy available at maximumspeed.Aero fairing. Although all major ex-posed tubes and struts have already beencarefully faired, the aerodynamic dragnear 20 knots / 10.3 m/s still consumesbetween 25% to 35% of the propulsivepower, most of this being drag on therider. Enclosing the rider in a high-quality aerodynamic shell wouldtheoretically push the maximum speedpast 20 knots. Naturally, for record-setting runs it is desirable to operate thevehicle with the fastest legal tailwind(3.22 knots / 1.67 m/s) to reduce the airdrag to an absolute minimum.Larger rider. The benefits of increas-ing rider size on a hydrofoil vehicle aresignificantly smaller than on a bicycle.The actual benefits depend on the rela-tive fractions between profile and in-duced drags. With the maximum legaltailwind, the Decavitator's induced dragis about 27% of the total at 18 knots / 9m/s, and 20% at 20 knots / 10 m/s, so alarger rider would have some advantage.However, the vehicle's hydrofoil systemis already very highly stressed with the140-lb / 64-kg design rider weight, and asignificantly heavier rider would requirelarger underwater surfaces to providegreater structural strength. Also, theheavier rider would need to expend dis-proportionately more power to lift thepontoons and when preparing for thesingle-wing operating mode, unless thewing areas are increased. In either case,much of the larger rider's advantage dis-appears. Larger propeller. As men-tioned earlier, the air propeller isrelatively inefficient at lower speeds dueto excessive disk loading. Increasing thediameter would therefore give morethrust at low speeds for the same powerinput, giving faster transition and accel-eration. This may significantly conservethe rider's energy and hence permit ahigher power level to be sustained overthe 100-meter course, although this isdifficult to quantify. Offsetting this po-tential benefit is the increase in size and
p. 8 Human Power, fall & winter, 1991-2, vol. 9/3 & 914


Human power, as commonly trans-mitted through pedals and rotatingcranks, peaks once every 180 degrees ofcrank rotation, with deep "dead spots" inbetween. Placing the two cranks 180degrees out of phase results in in twopower peaks per turn of the crank. Inaddition, the muscles of the leg candrive the foot in any direction, if weaklyin most -- so the dead spots aren't as badas with single-cylinder steam engines,treadle sewing machines and the like,that can actually hang up at dead centerand must be hand-started. The smallamount of torque that the rider can applyat the top and bottom of the pedal strokemakes it possible for a bicycle's drive-train to include a freewheel, without theneed for a flywheel in the crankset tobring the cranks over the dead spots.
In a bicycle, the unavoidable mass ofthe bicycle and rider takes the place of aflywheel, maintaining a relatively steadyforward speed despite the uneven powerapplication. This works very well atnormal riding speeds, but poorly whenclimbing a very steep grade at a speedbelow three or four miles per hour (twom/s) -- so the rider compensates with a"pigeon walk," throwing upper-bodymass backward and forward to even outthe bicycle's forward speed and to putadded downward force on the rear wheelduring the power phase of the pedalstroke. At very low speeds, and espe-cially on soft surfaces, the ability to shiftbody mass gives an upright bicycle someadvantage over a recumbent. Unfortu-nately, no type of bicycle gives anyclimbing advantage to a rider with ex-cess mass!
The flywheel effect requires low roll-ing resistance and a rigid connectionthrough the drivetrain to the road sur-face, as you rapidly discover when ped-aling through deep gravel or climbing aslippery hill. (Nonetheless, only a dirt-track motorcycle or an all-wheel-drivevehicle can outclimb a bicycle on a slip-pery surface, since the bicycle benefitsfrom having most of its weight over thedrive wheel when climbing, and fromrapid, sensitive control over drivetorque!)
HP-alternator problemI became aware of the importance of
the flywheel effect after I built a human-powered device that lacked it. This wasan automotive alternator mounted on abicycle, with a two-stage chain drive tobring the rpm up to the required range.Unfortunately, an automotive voltageregulator works to keep the alternator'soutput constant regardless of how fast itis turning. Consequently, the inputtorque requirement increases as the gen-erator turns more slowly. This worksfine with an automobile engine, whichhas a multicylinder engine and a fly-wheel, but it worked poorly for me: thepedals were difficult to push over thedead centers or to accelerate to runningspeed.
The dead-center problem -- thoughnot the startup problem -- can be solvedby a conventional flywheel, using rota-tional inertia. I've seen at least one de-scription of this venerable idea inHuman Power, in an electrical generat-ing system used on a sailboat to poweran automatic steering system.
But my generator was mounted on abicycle intended also to be ridden: onegoal in assembling it was to promote hu-man power in a parade from the seat ofmy moving bicycle, through a powerfulpublic-address system. I also wanted tobe able to pedal the generator when thebicycle was stationary, so I could notdrive it directly off the rear wheel anduse my own mass as the flywheel. Aconventional flywheel would be heavy,making the bicycle harder to pedal uphills, and would act as a gyroscope, af-fecting steering and balancing. Thesearch for a solution to these problemsled me to consider some alternatives toflywheels.
Conventional flywheelsA conventional flywheel has a high-
mass high-speed rim, so that variationsin energy input and output cause onlysmall percentage changes in its rotation-al rate. The energy which the flywheelstores and releases corresponds only toits changes in rpm. The high averagerotational speed does not contribute to
energy storage or release in steady-stateoperation, but does increase rolling andaerodynamic friction, and can lead tocause backlash in a low-rpm human-powered system in which the flywheelmust be geared up to run at high rpm. Aflywheel also makes both starting andstopping more difficult.
It does not matter for a conventionalflywheel when or in what amounts ener-gy is input and extracted. Short or long,light or heavy pulses of energy input oroutput make little difference to it, aslong as it has sufficient capacity to ac-commodate them. If the pulses are toolong and/or heavy, you move up to alarger, more massive or faster-spinningflywheel. But in a human-powered sys-tem, especially a human-powered ve-hicle, we want a lighter flywheel. If wedesign a device that requires a particularinput and output -- tailored to the humanengine and the task at hand -- we canachieve this goal.
A no-flywheel alternativeThe lightest flywheel is no flywheel
at all, and is realizable in the case of ourelectric generator charging a battery.All that is necessary is to add a tachome-ter sensor to the voltage regulator, so itcuts out the generator below a certainrotational rate. This idea is nothing newto people who build wind generator sys-tems. One approach is to use acentrifugally-actuated mechanoelectricalswitch borrowed from electric typewrit-ers. (See "Marshall Price's 'Basement-Built' Windplant," in Mother EarthNews, Issue 100, July-August 1986, p.103).
Taking advantage of the chain-and-sprocket drive, we can also use the prin-ciple of the Hammond organ: a coil ofwire wound around a bar magnet withone pole placed near passing steelsprocket teeth will generate an alternat-ing current increasing in frequency andintensity as the sprocket spins faster.Rectifying and smoothing this outputwill generate a dc control signal that cancut in the generator at the desired rota-tional rate. Just as with a wind-powersystem, an ammeter and state-of-chargemeter also must be supplied and heeded;since the system is designed to use inputpower as available, it cannot raise elec-trical output to keep the battery fullycharged as power demand increases.
A flywheel accomplishes two pur-poses: to accommodate varying energy
p. 10 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
IN SEARCH OF THE MASSLESS FLYWHEELby John S. Allen

input, and to smooth energy output; butother devices may achieve one of these-goals without the other. The conven-tional voltage regulator and batterysmooth the output but do not accommo-date to the input. The cadence-sensingvoltage regulator, on the other hand, ac-commodates the varying input from thehuman engine by varying the output tothe battery.
Despite this difference, the "feel" ofa cadence-sensing voltage regulator willbe similar to that of a bicycle with afreewheel: very little mechanical re-sistance up to the cadence at which thegenerator cuts in; though, unlike withthe bicycle, the "wall" at that cadencewill be "soft" if the the rider pushesdown hard: in this case, conventionalvoltage regulation will set in and reducethe load at the pedals. This problem is
relatively unimportant compared withthe dead-center problem. A more con-ventional bicycle-like feel might beachieved by sending excess power to anauxiliary load, such as a second batteryin need of charging.
The control device might be de-signed to auto-adapt to changes in pre-ferred cadence by slowly raising andlowering the cut-in cadence in responseto changes in power input. Such a fea-ture would be especially useful when thegenerator is mounted on a bicycle likemine, intended to be ridden while gener-ating electrical power. Control circuitrymight also be designed to mimic the ef-fects of different chainwheel shapes,since opinions differ as to which is pre-ferable.
Capacitors for short-term storageIf some electrical output is to be used
while pedaling, a large capacitor (in ef-fect, an electrical flywheel) in parallelwith the battery is desirable, to avoid abattery discharge and loss in efficiencybetween pedal thrusts. If we do not needto store up energy for use later, we candispense with the battery and use onlythe capacitor, which is essentially100-percent efficient. Let us examinewhether we can easily obtain a large-enough capacitor to even out power de-livery through one pedal stroke.
Let us assume that our human powersource is delivering 375 watts of power(about 1/2 horsepower) at a cadence of100 rpm. This is more or less a worst-case situation, representing the highestpower output which a top-rate humanengine can maintain for a sustainedtime. Since there are two power phasesand two coasting phases per rotation of
the pedals, we make the simplifying as-sumption that the capacitor must storeenergy for 1/4 crank rotation and releaseit for the next 1/4. Then, the capacitormust store 375 x 60/400, or 56.25 watt-seconds (joules) of energy.
Let us assume that we are using a12-volt battery. This charges at 14.4volts and discharges at 13.2 volts. Thedifference between these voltages repre-sents a power loss -- an efficiency ofonly about 92 percent. To avoid thisloss, the capacitor must prevent the volt-age from going below 13.2 volts.
Taking the equation P = V2/R or R =V2/P, our 375-watt load at 14.4 volts isequivalent to an electrical resistance of0.552 ohm. The current is 26.06 am-peres.
A one-farad capacitor, approximatelythe largest commonly available, will de-liver one ampere-second when chargedto a potential of one volt. In our exam-ple, when charged to 14.4 volts, the ca-pacitor holds a total of 14.4 ampere-seconds. In the 0.15 second correspond-ing to one quarter of a crank rotation, itmust deliver current at the rate of 26.06amperes, for a product of 3.909 ampere-seconds.
The actual behavior of a capacitor isnot to deliver a constant current until ex-hausted, and then cut off; actually, thecurrent and voltage together decay expo-nentially. Our 3.909 ampere-secondsare more than a quarter of the totalcharge in the capacitor, and extractingthem will reduce its voltage by morethan a quarter -- well below our12.2-volt minimum.
Another way to put this is that the1.2 ampere-seconds to discharge the ca-pacitor from 14.4 to 13.2 V correspondsto 1.2 amperes times 13.8 (average)volts for I second, or about 16.6 joules.(In this calculation, we have ignored thesmall difference between the arithmeticaverage and the geometric mean of volt-age).
The one-farad capacitor is not largeenough to store all the energy needed,though it fails by factor of only about 8.As long as fluctuations of a fraction of avolt are acceptable to the power-usingdevice, the one-farad capacitor would bejust about large enough with a currentdemand of 50 watts -- a low-to-averagebicyclist's output. Also, recall that thecapacitor need be large enough only tostore power which is not going into thebattery. For example, if we are runninga radio drawing 50 watts and charging alarge battery which can absorb 500watts, we need a capacitor capable ofhandling only the 50-watt load.
Mechanical solutionsIf voltage fluctuations are unaccept-
able, if more energy is needed than a ca-pacitor can conveniently store, or if weare powering a non-electric device, thenwe must look elsewhere, toward a me-chanical solution.
One possible device is a mechanicalinput-power regulator that operates asdoes our tachometer sensor on the elec-trical generating system, by somehowvarying mechanical loading or mechani-cal advantage. Achieving such controlis easy in a fluid-pumping system suchas a water pump, air pump or hydraulicpress.
In fact, there are classic examples ofregulated pumping systems: the playerpiano and reed organ use the pneumaticequivalent of a dual mechanical ratchetdrive with spring-loaded return stroke.They limit pedal force and regulate out-put air pressure by dumping excess airvolume through a relief valve. The per-son pumping the bellows quickly learnsthat there is no advantage in pumpingmore air than the air chest can store, andthat steady airflow and pressure can bemaintained by using a quick returnstroke, so the power phases for the twofeet overlap.
A more efficient arrangement topump gases or liquids -- though it wouldnot maintain steady flow -- would be adual-piston pump operated by two crankthrows between the pedal cranks, drivingtwo connecting rods 180 degrees out ofphase so the maximum power demandwould be at the part of the pedal strokewhen the most power is available. Forgreater efficiency, our power regulatorcould use mechanical-advantage changerather than power-dumping. For exam-ple, we could simply place a spring ineach connecting rod between crankshaftand pump piston. The spring would beequipped with a limit stop so it woulddeflect only when the pressure on thepiston exceeded a predetermined limit.
As with the pump organ, there is nospeed regulation with this arrangement,only an adaptation of the force require-ment to the characteristics of the humanpower source. Speed regulation wouldrequire a mechanical governor whichwould, for example, close a valve, al-lowing pressure to build up in the pumponce the desired cadence was reached.
A crankshaft-and-connecting-rod ar-rangement like that of the proposedpump can also be connected through apair of ratchets to a mechanical load.This arrangement is suitable for a winchor a jack, working against weight or fric-tion and whose power requirement is
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p.11

proportional to drive speed. The powerinput required at the pedals then variessinusoidally between a low and high val-ue, since the load advances at a rate thatalso varies sinusoidally. The peak pow-er demand, as in our other examples,should be at the crank angle at whichmaximum rider power is available.
Another approach for a winch is towind the cable on a rectangular plate, asis commonly done with children's kite-string holders. As the plate turns arounda central axis, the rope winds on at anapproximately sinusoidally varying rate.Such a winch must use flexible rope orstring rather than stiff cable, to flex overthe edges of the plate. A bicycle chainon a hyperelliptical chainwheel couldachieve similar results while allowingthe use of conventional derailleur gear-ing to vary the output ratio.
In many applications, however, theconnection between the human engineand the load is lossy, making the loaditself into a poor flywheel, but the loadmust advance steadily. A steady load onan electrical generator is one good ex-ample. A human-powered boat or air-plane is another: its propeller is nearlyidling when the pedals are at dead cen-ter. The propeller's rated efficiency de-pends on fluid-dynamic characteristicscalculated for a given power input, andserious losses in efficiency are unavoid-able when the power input is uneven.
Spring-mass energy storageOne solution to this problem is a hu-
man engine consisting of two or morewell-matched riders, with the cranks 90degrees out of phase. But for a single-rider device, we can take our inspirationfrom the bicyclist's slow-speed "pigeonwalk" discussed earlier. If we include inthe drivetrain a device that in effectrocks backward and forward, we can ef-fectively even out the power input.
This device could be a spring, de-flected by a connecting rod on a crank-shaft turning twice as fast as the pedalcranks. The crankshaft should be phasedso that the spring stores energy at thestrongest parts of the pedal stroke andreleases it at the dead centers. Given thesame assumptions as in our example ofelectrical power storage -- 375 wattspower output by the human engine at acadence of 100 rpm -- the spring muststore the same 56.25 joules (newton me-ters) of energy. For example, we coulduse a spring with a constant of 225 new-tons/meter (166.0 lbf/ft) operatingthrough a distance of 0.25 meter (0.82 ftor about 10 inches). A more compliantspring would be more typical, since
most riders would not produce as muchpower.
The spring device would work equal-ly well at any cadence, but it would notadjust itself to different levels of forceinput -- probably not a problem with aturbine or propeller, which typically op-timizes in a narrow range of torque androtational speed. A variable-rate spring(with coils closer together at one end, sothey are fully compressed before those atthe other end) could be made stiffer forheavier power applications by manuallyapplying a preload.
Placing the power-evening spring de-vice on the output shaft would avoid anyproblem with backlash, but would re-quire the output shaft to turn at twice thepedaling cadence -- actually, within therange of common practice with the pro-pellers of human-powered boats and air-planes. Another option to avoidbacklash would be to place the device onan intermediate shaft on the way to theoutput. A third option would be to drivethe spring from a two-lobed cam on thepedal crankshaft, or to use a pair ofcarefully-designed variable-rate springsactuated by two connecting rods oppo-site one another on a crank throw on thepedal crankshaft itself. All of these op-tions could provide the appropriatetwice-per-crank-rotation energy-storageand -release characteristic without back-lash.
Almost needless to say, the energy-storage device must be designed for thelowest possible frictional loss, or it canswallow up any efficiency gain that itmight realize. The spring should runfree, without a sliding guide, and allconnecting-rods or cam followers shoulduse rolling-contact bearings. Fortunate-ly, the low rpm of bicycle power produc-tion favor such solutions.
Mechanical resonatorA second type of device that can
smooth power input when the outputspeed must be steady is a mechanicalresonator. Unlike the spring device de-scribed above, this adjusts automaticallyto different levels of power input. It isespecially suitable to a stationary devicesuch as a human-powered lathe, inwhich extra mass is tolerable and load-ing may vary considerably, though thepedaling cadence remains relatively con-stant.
I propose a device like the balancewheel of a spring-wound watch. Thebalance wheel consists of a flywheeldriven by a ratchet escapement and con-nected to the body of the watch by a spi-ral torsion spring. In our device, we
leave out the ratchet drive and connectone end of the torsion spring to the fly-wheel and the other end to a rotatingshaft of the drivetrain. Actually, twoequal torsion springs attached to the fly-wheel and driveshaft 180 degrees apartwould be preferable, in order to cancelradial loads on the bearings supportingthe flywheel.
We select the mass and spring toresonate somewhere between 150 and220 Hz -- twice the expected pedalingcadence. This is the predominant com-ponent of unevenness in pedaling output.Any unevenness in shaft speed at thisrate will drive the resonating mass andspring system so it stores energy (windsup) during the powered part of the strokewhen the shaft is turning faster, thenovershoots and releases energy(unwinds) at dead center, when the shaftis turning more slowly. The oscillationof the system have to store a maximumof about one quarter the energy deliv-ered in a full turn of the cranks.
For these reasons, the flywheel canbe lighter than a conventional, brute-force flywheel and/or can turn moreslowly. We must still bring the flywheelup to speed when starting out, and as wedo, it will require an energy input; butthis will not be as great as with a con-ventional flywheel.
Lag and overshoot when starting andstopping can be minimized by rotationallimit stops, also desirable to preventoverstressing the spring. We might alsoconsider pre-winding and latching thespring so we can release the stored ener-gy as we start. This would allow the fly-wheel to assist rather than hinder startupin a critical application like bringing ahuman-powered boat up to planingspeed.
If our device uses a constant-ratespring, it would work best at only onecadence, though, as mentioned above, itwould self-adapt to different power in-puts at that cadence. A variable-ratespring could make the device adapt todifferent cadences, at the expense ofsome harmonic generation, perceptibleas "jiggle" at the pedals, due to nonlin-ear operation. For example, a spiralspring can be designed so that some ofthe coils wind tightly onto each othernear the limits of travel. The springconstant then increases with increasingdisplacement, raising the resonant fre-quency of the system. Another way tobroaden the cadence range is to use twoor more coupled resonators.
Here's a rough-and-ready calculationfor the simplest case of an oscillatingflywheel: for the same rider as before,
p. 12 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4

delivering 510 watts (375 foot poundsper second) at a cadence of 100 rpm, the(2.3-kg) 5-pound rim of a flywheel willhave to oscillate through a linear dis-tance of 3.43m (11.25 feet) to store andrelease the energy that will take thecranks through one quarter-turn. If, forexample, the flywheel is 762 mm (2.5feet) in diameter, it has to oscillatethrough 756 degrees, alittle more thantwo turns, with respect to the shaft towhich it is attached. This appears realiz-able, though I have not yet built a mod-el.
The rotational inertia and spring con-stant are noncritical as long as theycombine to produce the correct resonantfrequency: at that frequency, the sys-tem's mechanical impedance goes to avery high value. In order to optimizethe oscillatory travel for a flywheel of agiven rotational inertia, however, therotational rate of the shaft driving theflywheel must be chosen so that thetorque that the spring delivers to andfrom the shaft at its working limits ofdeflection equals the peak torque that isrequired to even out the power input ofthe drive system.
If the shaft turns too slowly, thespring cannot deliver enough torque un-less it winds and unwinds too far, andthe flywheel hits the limit stops. If theshaft turns too fast, the spring does notwind and unwind to the full extent possi-ble; a softer spring and lighter flywheelcould achieve the same results.
It is always a problem to decidewhich of the many vehicles and "peopleaccessories" that abound in the worldmight be considered to be human-powered vehicles. This article attemptsto categorize these devices and decidewhy some are, and some are not, HPVs.Guidelines are also developed that maybe used to determine in general whethera machine can be considered to be anHPV. The International Human Pow-ered Vehicle Association requires drivercontrol of and brakes on vehicles used intheir land competitions, so methods ofguiding and stopping devices are alsodiscussed.
A 2.7-kg (5-pound) flywheel, withperhaps as much mass again for thespring and supporting framework, wouldcertainly be tolerable in a human-powered boat, though the devices dis-cussed earlier that use only springs areprobably more suitable for a human-powered airplane.
ClosureI've described a few possible devices,
some well-known and some as yet un-built, to adapt the uneven power outputof the human engine to various loads.All of these devices achieve a flywheeleffect or something like it without a con-ventional, brute-force flywheel. I'veseen quite a number of human-powereddevices that could be more useful or ef-ficient if they incorporated such devices,and I think that developing such devicesis an interesting and fruitful object forhuman-power research. I hope that Ihave provided some food for thought,and I am very interested in hearing fromanyone who tries out one of the ideasI've described.
John S. Allen is an engineer, writer andconsultant on bicycling. He is author ofThe Complete Book of Bicycle Commut-ing and co-author of Sutherland's Hand-bookfor Bicycle Mechanics.
John S. Allen, 7 University Park, Wal-tham, MA 02154-1523; 617-891-9307
First serial rights (c) 1991 John S. Allen
DEFINING SOME TERMS.
"Human-powered vehicle" is a termwith several sub-meanings. "Vehicle"indicates that something is supported."Powered" infers that the vehicle moves."Human-powered" indicates that one ormore person(s) is or are providing theenergy required to move the vehicle.Though not stated, it can be inferred thatthe human power source is aboard thevehicle, that is, the vehicle supports thehuman, and that the human is able tocontrol where the vehicle goes, andwhere and when it stops.
The foregoing definition could beinterpreted to include running shoes,which have been developed over time to
dramatically increase speeds of athletes.But there is something about a runningshoe that does not fit the accepted mean-ing of a human-powered vehicle.
Impedance matching is an importantconcept in electrical engineering but isalso used by mechanical engineers, andis especially important when workingwith the limited human power outputsused to drive HPVs.
The driver of a car must shift gears,or the transmission may do so automati-cally, when the engine is running eithertoo fast or too slow to produce powerefficiently. The transmission providesan impedance match between the en-gine's and car's speed and power require-ments.
Humans can produce widely varyingpower outputs over a wide range of mus-cular rates and displacements, but mostoutputs, rates and ranges are very ineffi-cient, which can lead to early exhaustionand even injury. To produce power withmaximum efficiency humans need tooperate over a narrow range of muscularrates and displacements. If a bicycle isgeared too low, where the rider has moreenergy available than is required to pro-pel the vehicle at its maximum attain-able speed, then the impedance matchfor that rider is not optimum. In thiscase the rider runs out of pedalling rate(rpm) before he runs out of energy topush the pedals harder. The opposite isalso true where the gear is too high, sothe rider is operating below an efficientspeed and runs the risk of muscle andjoint injury.
A fixed-gear track bike can have thegear ratio altered to suit rider and trackconditions. A derailleur-equipped bi-cycle's gears can be changed while beingridden to optimize rider output over va-rying riding conditions.
To be rated a human-powered ve-hicle, there must be a way that the ma-chine provides for a reasonablemachine-to-rider impedance match.This is usually provided on wheeled ma-chines by a drive mechanism.
Coupling speed is the speed at whicha machine's drive train is accelerated toequal the speed of the machine andcouples to allow power transfer. Scarceenergy and much of the power stroke areused to bring the rider's power-producing limbs and the drive mecha-nism to coupling speed, when a machineis traveling at high speed, before thelimbs can be used to input power.
A standard bicycle requires most of apedal stroke to engage the drive whenbeginning to pedal again after coasting.
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p.13
WHAT IS AND WHAT IS NOTA HUMAN-POWERED VEHICLE
AND WHYby Rob Price

Bicycles are constant-drive machines, sothe coupling process is done only whenthe rider begins to input power aftercoasting. Devices with intermittentpower input, such as ice skates, Nordicskis, skateboards, scooters, and someHPVs, need to achieve coupling speedon each power stroke. This is indicativeof poor efficiency, hence a poor im-pedance match. Poor impedance match-ing is inherently inefficient.
The coupling-speed and constant-versus intermittent-drive concepts arediscussed in detail in the HPV DriveTrains chapters of the forthcoming HPVHandbook being edited by Allan Abbotand David Gordon Wilson.
PED e. Fo
SCtAK5
I; P
WHEELED AND NON-WHEELEDMACHINES.
There are many devices that can sup-port a person, many by attaching to theuser's feet, which are designed to aug-ment movement and be controlled bytheir riders. The list is long, but dividesinto just two groups: those with wheelsand those without wheels. The wheeledcategory further divides into wheel-driven and wheel-idling sub-groups, dis-cussed later. In the unwheeled categorythere are three sub-groups: aircraft, wa-tercraft and land machines.
HPAs AND HPBs.Air is a gaseous medium character-
ized by low friction. There are two air-borne HPV possibilities: gliders andhuman-powered aircraft, or HPA. Glid-er lift is provided by updrafts, caused byterrain or thermals, once the airplane istowed to flying speed. Gliders are hu-man controlled, but not human powered.Current HPA designs are brought to fly-ing speed, maintained there and con-trolled by human power, via an efficientimpedance-matching drive system to apropeller, so they are HPVs. CurrentHPA designs take off and land at verylow speeds, and tend to roll on small 50-to 150-mm- (2 to 6") -diameter wheelsfor their short takeoff and landing runs.Once power input is stopped, HPAs landand stop quickly without the need forbrakes.
Water is available in two forms use-ful to vehicles, liquid and solid, or ice.Rowboats, racing sculls, canoes and kay-aks are vehicles that utilize human pow-er via arms working oars or paddlesthrough liquid water. Human-poweredboats, HPBs, have been built that utilizea drive train to turn a screw propeller orpaddlewheel for motive power.
Paddles and oars have large flat areason their outboard ends that are dipped
L-LDi-- S- -w I
- -I 15uLLD1W SEAT
Figure I Rowing-scull design fatures
into the water and push against the re-sistance of the water to move the boat inthe opposite direction. The human de-livers power to the paddle or oars via thearms. On paddled boats, such as kayaksand canoes, one arm acts as the fulcrumand the other dips the paddle into andpulls through the water. Kayaks use adouble-ended paddle and the paddler'stwo hands are stationed a few feet apartnear the center. Canoes use a single-ended paddle with one hand gripping theend and the other about a third of theway out the length of the paddle.
The paddler dips one end of the oarthen paddles a few strokes on one side ofthe boat while providing a fulcrum forthe paddle end with the other hand. Thepaddle then changes hands so the actionis moved to the opposite arm for thenext series of power strokes. In this waypower is balanced on both sides of theboat and both arms, and the boat goes ina fairly straight line atop the water.
Rowed boats use two oars for eachrower, one for each hand Each oar hasa pintle, or pivot, mounted into eachgunwale, which is the top of the side ofthe boat. Pintles allow the outboardends of the oars to be lowered into andraised out of the water and moved for-ward and aft, but not revolved. Therower pulls on the inboard end of theoars. Putting the pivots outboard of therower reverses the direction of oar mo-tion so the rower faces aft instead of for-ward, where paddlers face. Rowers maybrace their feet against the boat hull andmove their torsos forward and aft, bend-ing at the waist, to increase the stroke
length and to use the trunk and legmuscles to assist the arms. [Rowers mayalso use one long oar, called a "sweep",in eight-oared shells and similar boats].
Turning of paddled and rowed boatsis accomplished by working only onepaddle or oar, dragging one oar whileworking the other, working the paddlesor oars in opposite directions, or, for ca-noe paddles, setting one end in the waterbehind the boat and pushing sideways,like a rudder. Prop and paddlewheelboats generally use rudders for direction-al control. Since water is a high-viscosity fluid, boat speed decays quick-ly, eliminating the need for brakes, al-though most drives can be reversed tostop quickly.
Paddled boats cannot be consideredto be HPVs because impedance-matching options are limited to changinghand position on the paddles. Kayaksaredesigned for use in running water andthe paddles are used more for directionalcontrol and for fending off obstructionsthan making headway. [But the Aleutswouldn't agree - ed]. Row-boat oarlengths are determined by boat width,which determines distance between thepintles. The inboard oar ends must notoverlap so they can be worked simulta-neously, and optimum outboard- toinboard- length ratio is less than 2: 1.Rowboats do have sufficient impedancematching to be HPVs. Racing shells, forsolo or multiple rowers, mount thepintles well outboard of the gunwales onbrackets to greatly increase oar length tomake a higher drive ratio. Sculls arespeed-limited by the rate at which the
p. 14 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
\ r ~~~- - II V-----
..
t

rowers can stroke, rather than water fric-tion. At high speeds the effective strokeis limited by the need of the rowers tosynchronize the oars with the relativewater flow, coupling speed, before dip-ping the oars and applying power. Someshells, Figure 1, use sliding seats to al-low the legs to assist the arms and to in-crease oar stroke length more than canbe done in a fixed-seat rowboat. Theimpedance match is improved by the useof the seat-slide mechanism, and scullsare good examples of HPVs. Propellerand paddlewheel-driven HPBs are alsogood examples of HPVs because thespeed-changing or crank drive providesa good impedance match.
Ice skates attach to the feet and pro-vide a low-friction way to glide over sol-id water. Ice is characterized by a verylow coefficient of friction because theskate blade is normally lubricated with athin film of liquid water. This is accom-plished by using blade edges that arevery narrow, resulting in a tiny contactarea on the ice. The high pressure meltsthe ice as the skate blade slips along.Foot placement in yaw, pointing left orright, and roll, blade directly under oroff to either side of the centerline of thefoot, purportedly determines the direc-tion of travel. The forward tips of theskate blades often have teeth, so accel-eration and braking are done by raisingthe heel and digging the blade toe intothe ice. When accelerating at higherspeeds the skate blades may mark the icein a narrow herringbone pattern, wherethe rider shifts weight from one foot tothe other near the end of the stroke, andthe forward component of the slightangle serves to accelerate. An alterna-tive method of braking is toslide theskates sideways so that the blades shaveoff a thin layer of ice, quickly absorbingthe rider's kinetic energy. Speed skaterscan achieve high speeds, but longstrokes to bring the legs to couplingspeed with the ice at high velocities in-dicate a poor impedance match, prevent-ing ice skates from being consideredHPVs.
WHEEL-LESS LAND VEHICLES.Earth is generally rough and charac-
terized by a high coefficient of friction,so most land vehicles include wheels tosmooth the ride and change friction fromsliding to rolling. An exception occurswhen the ground is covered with snow.After a little packing the coefficient offriction of snow trends toward that ofice. Snowshoes, toboggans, sleds, snow-boards, and skis are favorite wintertimehuman accessories.
Snowshoes are simple devices de-signed to increase the surface area of thefoot of the user to prevent fallingthrough the crust atop deep snow. Nor-dic skis, even after they have brokenthrough the crust, are much more effi-cient. Snowshoes are designed only tosap the strength of the best human en-gine, thus are not HPVs. Sleds and to-boggans are purely gravitypowered, areunsteerable and have no brakes, so can-not possibly be HPVs.
Skis come in two major varieties: al-pine, or downhill; and Nordic, cross-country or X-C. Alpine skis may beturned by rolling the ankles in the de-sired direction, which pulls the outeredge off the snow and digs the insideedge into it. The skis are narrower inthe center which presents a curved edgeto the snow, causing the turn. Alpineskis may be stopped by snowplowing,which is rolling both ankles inward,pointing the fronts of the skis towardeach other, then forcing the feet apart,plowing up a vee-shaped ridge of snow.The skis may also be slid sideways thesame way as ice skates. Alpine skis areentirely gravity-powered so cannot becalled HPVs, although potential storedenergy of gravity may come from humanpower, so if you walk up the hill you cancall your skis HPVs.
Nordic skis are able to ascend gradu-al slopes due to the fishscale-shaped orstepped bottom surfaceconstruction.This provides a one-way clutch againstthe snow, so that they do not slide back-ward down gentle grades. Skiers use in-ertia and poles to augment the uphillstruggle until the grade gets too steep;then they may ascend making marks in aherringbone pattern similar to that ex-plained in the ice-skating section, ormay step sideways, skis parallel, makingmarks like a caterpillar-tractor tread upthe slope. The skis may also be re-moved and carried on grades over about0.5%. It is possible to steer these skis,which are longer, narrower and less ta-pered than Alpine skis, but most Nordicskiing is done in snowmobile-preparedtracks, grooves in the snow which func-tion like railroad tracks, eliminating theneed to learn the elusive steering tech-nique.
Like Alpine skis, stopping on Nordicskis may be accomplished by snowplow-ing, and sometimes by lifting and plow-ing only one ski out of the track, tomaintain directional control. An alterna-tive is to drag the baskets of the poles inthe soft snow next to the tracks. Basketbrake force may be increased by placingthe poles between the legs and using the
seat area as a fulcrum, a favorite of mencontemplating castration. As with Al-pine skis, the quickest way to stop is tofall over. Though Nordic racers canmove very fast, long arm-with-pole andleg strokes are necessary to reach coupl-ing speed before the limbs can inputpower. Despite the bottom surfaceclutches, there is no impedance-matching mechanism, so Nordic skiscannot be considered HPVs.
Snowboards are a wheel-less skate-board on which both feet rest, whichprevents the problem of the two skismoving in different directions. Like Al-pine skis these are entirely gravity-powered so are not HPVs.
Concluding this part, the only non-wheeled vehicles considered to be HPVsare propeller-driven HPAs, propeller- orpaddlewheel-driven HPBs, rowboats androwed racing shells. Paddled boats didnot qualify. Air and water propellerscould also be considered to be wheels,though the direction of vehicle travelrelative to the axis of wheel rotation is atright angles to that of a conventionalland wheeled vehicle. No wheel-lessland, that is ice or snow, vehicles metthe criteria.
WHEELED VEHICLES.Because earth and pavement are
characterized by high coefficients offriction, wheel-less vehicles will notslide easily on them as they will throughair, or on water, ice or snow, makingwheels necessary. Wheeled vehicles canbe divided into two categories: thosewith power transmitted through one ormore of the wheels and those where allthe wheels idle, or are not driven. Un-driven wheeled vehicles are reviewedfirst.
Rollerblades use several round-edgedwheels in tandem of about 50-mm (2")diameter to give the rider the feel of iceskates. Rollerblades are built onto bootsworn on the rider's feet. The path rol-lerblades make when accelerating is anarrow herringbone pattern as explainedin the section on ice skates. There is noPqPtn m^hsnizm~ Cn rnntral is hvli1tIi l[ 11,Lt1i)111, OJ ;ILtll 13 Uy
picking, aiming and placing each foot inthe desired direction of travel. Stoppingrollerblades is accomplished by rotatingthe ankles as with ice skates, but by rais-ing the toes instead of the heels, thebrake pads being mounted in a saferlocation beneath the heels. A version ofrollerblades for summer use on skislopes uses a flat belt like a caterpillartractor tread to offer more contact areaover the uneven surface.
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p. 15

I) o cPPoSt. N!D>
AWC LE
TICOtV l I /A AaJ & I A ,'lg
Figure 2 Skateboard steering mechanism
Roller skates are attached to ormounted on boots or shoes and have twowheels each at the front and rear ends,each pair on a common axle. These run30 to 50 mm (1 to 2") in diameter andare placed about 50-mm apart. In sim-ple designs there is no steering mecha-nism. The side-by-side wheelconfiguration is designed to aid a youngrider's balance. On more sophisticateddesigns the wheel pairs turn as the rider'sankle is rolled in the direction of theturn, as illustrated in Figure 2. The for-ward axle turns in the direction of theturn and the rear axle opposite, allowingfor very-short-radius turning circles.Braking is similar to ice skates, wherefriction pads rest under the toes, ac-cessed by raising the heels.
Skateboards may be gravity powered,where speeds over 25 m/s (60 mph) havebeen recorded, or one foot may controlthe board while the other pushes againstthe ground to incite motion.
Skateboards use the roller-skatesteering design, illustrated in Figure 2,but with a wider track, or distance be-tween the wheels, of 100 to 200 mm (4to 8"). Skateboard wheels are about 50mm in diameter. The steering mecha-nism uses a high negative caster on theforward truck, where the steering pivotintersects the ground well behind theaxle centerline, and a high positive cast-er, intersect forward, on the aft truck.This turns the axles inward at the frontand outward at the rear as the board isleaned into a turn. These terms are ex-plained in "Human-Powered Vehicle and
Suspension Design," HP 7-3, (Spring1989).
In the 1960s Mickey Thompsonbrought a four-wheel-steered race car toIndianapolis, where the rear wheelssteered outward as on skates. As prac-tice went on the rear steering was ad-justed down to the point that it waseliminated by race day. Only slowearth-moving equipment use the conceptnow. Some modem cars have reintro-duced the all-wheel-steer concept butthey steer the rear wheels in the samedirection as the fronts [in some cars therear wheels steer in the contrary direc-tion at certain speeds - ed], and steer therear wheels only a few degrees.
Braking a skateboard is accom-plished by rotating about the rear axle,raising the front axle off the road, until abrake pad on the rear edge of the boardscrubs along the ground, or by rotatingthe board in the same way but flippingthe board into the air and jumping offsimultaneously, catching the board asthe rider decelerates on foot.
Sidewalk scooters are an old devicewhich have seen a resurgence in recentyears. They help children ease intoskateboarding, and the balance learnedon scooters makes learning bicycle bal-ance a very easy task. Scooters are com-prised of two wheels with a platformbetween for resting the feet. Power isinput by pushing off the ground as on askateboard. The front wheel is turned bya fork fitted into bearings as on a con-ventional bicycle, including a handlebaron a long stem so the rider may steerwhile standing. Scooter wheel sizes
vary from 120 to 300 mm (5 to 12") indiameter. Older machines had no brakesbut newer models use bicycle-type rimbrakes on the rear and sometimes frontwheels.
Rollerblades, roller skates, skate-boards and sidewalk scooters are allcharacterized by a lack of drive to thewheels, and because they have the samepoor impedance match at speed, wherecoupling speed is a problem, they cannotbe called HPVs.
WHEEL-DRIVEN VEHICLES.Conventional wheelchairs use the
rider's hands to drive two rear wheels ofapproximately 600-mm (24") diameter.The wheels are driven independently viadrive rings slightly smaller than the tirediameter and mounted to the wheels.The wheels may be powered separatelyto negotiate corners or in opposite direc-tions to turn the chair in place. Smallfront wheels which caster freely are usedto prevent forward tipover, but the rearwheels are set close to the center ofgravity of the rider to allow the chair tobe tipped back onto its rear wheels tonegotiate steps and curbs. Wheelchairsare a fixed-gear arrangement and stop-ping is done by gripping the drive ringsor running the palms against them. Inaddition crude brakes can be set once themachine is stopped to prevent drifting onslight inclines.
Racing wheelchairs use a smallerdrive ring to increase the effective gearand some use a single non-swivelingfront wheel which rises off the groundunder power and is placed in the newdesired direction of travel by careful useof differential power input, steering thechair while the front wheel is airborne.Wheelchairs, even the racing variety, donot have an efficient impedance-matching drive and have the coupling-speed problem at high speeds, so cannotbe considered to be HPVs.
A type of Chinese tricycle uses aninteresting hand-crank drive. Three700-mm- (27") -diameter wheels are ar-ranged two at rear, both driving througha differential, and one forward, steeredvia a tiller. The frame supporting thefront end is built around one side of thechair while the other side is open formounting and dismounting.
A vertical shaft is mounted to theframe near the front of the seat whichhas an armnn and a handle thatis crankedto make the machine go. The other handsteers the tiller and actuates a standardbicycle brake lever. As shown in Figure3, the vertical crankshaft has a bevelgear at the bottom that engages a similar
p. 16 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
t . ...d . . t _ .. .... _
,1M5>Y _
_ _ _
- I I _ _ - I - I c1~T _ ylu WI rl- Y \

CRPIX AA
CRA ItK
&L 4C-S
E E-sLMEELS
0c(U-s wr4
s FR4u-mECED PF~RL4l A L
- r 4 C_(AEAL = LAD
Figure 3 Chinese hand-crank tricycle drive
bevel gear on a jackshaft that runs cross-wise under the plate where the rider'sfeet rest. Two freewheels engagesprockets on the jackshaft near the cen-ter of the trike. The freewheels are ar-ranged for opposite engagement, so thatone engages and the other freewheelswhen the crank is turned in either direc-tion. Two chain drives run from thejackshaft sprockets rearward to the dif-ferential on the rear-wheel axle. Onechain runs in a simple loop to a sprocketon the differential mechanism case. Theother chain runs to a different-diametersprocket on the differential case but thechain runs from the bottom of the jack-shaft sprocket over the top of the differ-ential sprocket, around an idler sprocketand back to the jackshaft sprocket. Thisreverses the drive direction, so thatcranking the handle in one direction en-gages one drive ratio and reversing thecrank direction engages a different ratio.Because the bevel-gear pair and chaindrives may be arranged to produce a va-riety of ratios and it is a constant-drivemachine, this Chinese tricycle is a goodexample of an HPV.
A basic wheel-driven HPV is theHonda "Kick'N Go," which adds a drivemechanism to a conventional sidewalkscooter. This single-speed, lever-actuated, intermittent-drive machine wasmarketed by Honda motorcycles around1980. The drive lever, which may bepumped by either foot, is pivoted justforward of the rear wheel. The lever arcis rearward from 15 degrees aft of verti-cal to 5 degrees above horizontal, for asweep of 70 degrees. The lever is
250-mm (10") long and connects to anidler sprocket 90 mm (3.5") from thefulcrum. The drive is taken through 1/4"(6.2 mm) pitch roller chain. One end ofthe chain is fixed to the frame; it wrapsaround the lever idler, runs over a14-tooth drive sprocket on the wheelaxle, around another idler, then around athird idler, and the other end is fixed tothe frame, as illustrated in Figure 4. Thefirst idler acts to double the effective le-ver arm, the second increases the chainwrap around the drive sprocket and thethird reduces the extension of the spring,which stretches on the power stroke andreturns the lever on the retract stroke.The drive is coupled to a 180-mm- (7")
-diameter rear wheel through a rollerclutch 12-mm (1/2") inside diameter x16-mm (5/8") long. Each lever strokeadvances the scooter 1.3 m (51") makingfor a gear number of 410 mm (16"), justright for a child. The Kick'N Go utilizesstandard scooter steering for the230-mm- (9") -diameter front wheel anda hand brake that pushes a metal padagainst the rear tire face.
Sidewalk pedal cars are designed forsmall children and are safer than thesingle-wheel-forward tricycles theygraduate onto later. A pendant lever-crank mechanism is used to propel thesepopular cars. Adult versions using stan-dard circular cranks or lever pedallinghave also been produced. A hand-powered variation was owned by the au-thor decades ago, but these have notbeen seen since. Because they haveimpedance-matching mechanisms, theyare HPVs.
Sidewalk tricycles and the large-wheeled "ordinaries" of the 19th centuryhave no discernable drive mechanism,but the diameter of the drive wheel istailored to the leg length of the rider andthe crank length is tailored to allow acomfortable leg stroke. The effectivegear number of the machine is the wheeldiameter. Children's tricycle wheels runin a range of 220 to 300 mm (8 to 12").Though there is no mechanism, there isan effort to make the drive-wheel diame-ter match the power capability of therider, so both may be considered HPVs.
Track bicycles use a single-ratiostep-up sprocket-and-chain drive to al-low use of a smaller drive wheel thanthe ordinary, making its impedance-
C-\\
FooT
At4 w '4
ILEa
E. SPC4>c Kbr
~E.-LiJfru CwLU4TO rFly-
Ft 'Rsr tDL. EJ
Figure 4 Honda "Kick'n-go" drive
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p. 17
- -
;ooT
spfItw9^
,, ., _,,

CANOES PADDLEWYIIEEL IMPEDANCE-MATCHIINGCANOES PADDLEWiLEE LKAYAKS PROPELLER lUMAN-POWEREDKAYAKS PROPELLER
~~~ROWBOATS ~VEIIICLES ARER TSCULLS INDICATED IN ITALICSSCULLS
Figure 5 Human-propelled machinery versus human-powered vehicles
matching system more visible. Trackbikes also share with ordinaries andsidewalk tricycles the ability to stop themachine by reversing the pressure on thepedals, so these machines are seldomfitted with separate brakes.
Standard bicycles are often fittedwith multiple-ratio gearing to allow opti-mization of pedalling speed and poweroutput over a very wide range of operat-ing speeds and conditions. This is theultimate in impedance matching but of-ten requires a gear chart to discernwhich of up to 21 ratios is the next high-er orlower. And finally, virtually all thehuman-powered vehicles Human Powerreaders build use complex impedance-matching drive trains, so will be trueHPVs.
Chinese tricicyle and customer beingweighed. Photo: Rob Price
CONCLUSIONS.This article has attempted to describe
many of the devices people use as ve-hicles, to decide which are human-powered vehicles and to generalize thecharacteristics necessary for consider-ation as an HPV. The vehicles re-viewed, the categories they fit into andwhether they fit the impedance-matching drive definition are tabulatedin Figure 5.
Examples of HPVs include propeller-driven aircraft, prop- and paddlewheel-driven boats, rowboats and racing shells.Interestingly, no winter accessoriespassed the test. Among wheeled ve-hicles the Honda Kick'N Go scooter,pedal cars, sidewalk tricycles, the hand-cranked wheelchair, ordinaries and con-ventional bicycles are included, but noneof those wheeled vehicles where thewheels are no driven.
A final definition of an HPV is a ve-hicle that carries its human power sourceand moves, maneuvers and stops in acontrolled manner. Further, a true HPVmust be impedance matched to utilizehuman power efficiently, which is usual-ly accomplished via wheels and mecha-nisms.
EXTRAS OR THINGS TO TRY.An easier-steering skateboard could
be made by eliminating the steering ac-tion of the rear truck while allowing it tolean relative to the board. This wouldbe easier to learn on, because the steer-ing effect would be about halved, butwould require different tooling for the
front and rear trucks, which are identicalon current designs.
A skateboard could be modified touse the Kick'N Go drive, using three setsof gears. The rear axle could still leanand both wheels would be driven whengoing straight and a positraction-typedrive would result.
Rob Price, 7378 S. Zephyr Way, Little-ton, Colorado, 80123 USA303-973-6105
Rob is an airborne structures staff en-gineer in the NASA Space SystemsGroup at Martin Marietta AstronauticsCorporation in Denver. He designs in-stallations of equipment in the Shuttlecargo bay and is mission integration sys-tems engineerfor the tethered satelliteprogram. He has a B.S. in mechanicalengineering and is a member of theAmerican Institute ofAeronautics andAstronautics and, of course, the IHP VA.He has been designing and buildingHPVs that utilize aluminum monocoqueconstruction for 12 years.
CYCLING SCIENCE 3/3-4
This double issue, dated Septemberand December, 1991, was the last underthe editorship of Chester R. Kyle, co-founder of the IHPVA. (Cycling Sci-ence will continue under another pub-lisher, with Chet's continuedassociation). This issue has 64 pages,and included three articles by Chet Kylehimself (on alternative bicycle transmis-sions, the effects of cross winds upontime trials, and wind-tunnel tests of aerobicycles). Matt Weaver has an article onhis "Cutting Edge". There's a useful ar-ticle by Kohi Danh et al on frictional re-sistance in bicycle-wheel bearings, andanother on the aerodynamics of bicycl-ing clothing by Brownlie et al. JohnStegmann has four pages to himself topresent his view of front-wheel-driverecumbents. He thus competed directlywith Mike Eliasohn's long-announcedarticle on the same topic in the last issueof Human Power (9/2), to which Johncontributed. I am not an unbiassed re-viewer when a rival journal tries toscoop us. Mike Eliasohn collected ar-ticles on many different FWD recum-bents and reported on various points ofview, and I thought that his was the bet-ter piece.
p. 18 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
�


B=480 mm (19 inches), L=5.8m (19feet) (say). A cyclist, without paddle atready, may not employ the braces whichwould assist a conventional kayaker in adeveloped sea. The answer to this ap-pears to be outriggers. But these are notoutriggers that run in the water, generat-ing wetted area and drag. Rather, weuse low-volume (10-litre) outriggers,supported above the waterline, well aftof the cockpit. In the kawak design (seefigure), this location keeps the outriggersout of the way while paddling with aconventional kayak paddle. The loca-tion also minimizes occasions in seastates when splash from an outrigger isthrown onto the pilot. Ten-litre outrig-gers have prevented capsize in any seastate yet encountered. However, the lowvolume has proven useful in deliberatecapsizes when it is found that the timefrom full-over capsize until the boat isrighted and re-entered is less than 20seconds (an important consideration incolder water.) With such added safetymargin, one feels assured in building amain hull with characteristics similar toa catamaran hull.
Point (4) concerns length. As we'veseen, A tends to increase as J. Amonohull (with outriggers) may be 20%longer than a corresponding catamaran(5.8m vs 4.9m, 19 ' vs 16', say). Greaterlength of a monohull implies about 10%penalty in wetted area. However, at thespeeds that pedal craft operate, wavedrag becomes increasingly importantrelative to friction (wetted area). Wavedrag is a strongly increasing function of
S/ L, where S is speed. Increasedwetted area on account of L is more thanoffset by decreased wave drag. Thus,the monohull may achieve lower dragthan a catamaran at the higher speeds forwhich wave drag is signficant.
A suggestion of the difference indrag between catamaran and kayak-typehulls can be seen in drag tests on a Sea-Cycle catamaran (Human Power 8 (4),winter 90) and tests on six kayaks re-ported in Sea Kayaker 3 (3, winter 86)and 3 (4, spring 87).
Finally, it must be said that there aremany reasons to build pedal-poweredboats. Considerations of speed and drag,though important, are only a few amongmany considerations. Various other ar-guments may favor either the catamaranor the monohull. Let me close with abrief account of "kawak". [The word is
from the Salish native dialect, meaning"to fly" or "it flies". Pronunciationstresses the second syllable, roughly"kwok".]
Kawak most resembles an open-cockpit kayak including a daggerboard-like trunk through which one inserts adrive unit for pedal drive. The featurewhich defines the kawak (as a type ofboat) is this quick conversion (a few sec-onds) between being pedal-powered andbeing a more conventional kayak. Inshallows, in weed, or in uncertain wa-ters, the kawak has all the versatility of akayak. Then, with a stretch of open wa-ter to cross, the kawak converts (in sec-onds) to pedal drive, opening up greaterspeed and -- especially -- greater rangepossibilities.
In proof-of-concept prototype, a ka-wak was assembled from a ValhallaSurfski hull, using a SeaCycle drive unit.Ongoing developments include both theuse of a more conventional kayak (nicerlong-range touring features) as well aseffort toward a boat built purely for rac-ing boat. New drive units are being de-veloped for the newer boats.
Experience to date with the prototypekawak has been encouraging. We havenot made an athletic contest out of this.Rather, we have found that ordinarypeople can expect to sustain cruisingspeeds of 3 m/s while my assistant (46-years old, with no particular athleticability) peaks to 5 m/s. There is nodoubt even at prototype stage that stron-ger athletes would turn in higher per-formances. But kawaks are for everyonefrom children through seniors, offeringcomfortable day trips of 30 km (20miles) and more for people of very ordi-nary ability. (Athletic users can plandaily trips in excess of 60 km, 40 miles.)
Augustus Gast 962 Lovat Ave VictoriaV8X 1 V3 Canada
(Azugustus Gast is a consultant physi-cist).
Advances in flow visualizationusing liquid-crystal coatings
by Bruce J. Holmesand Clifford J. Obara
(The following is from a NASA "techni-cal support package, LAR-14342 sent inby Mark Bruce, New Canton, OH, USA.The full paper is SAE no. 8 7101 7. BruceHolmes of NASA Langley addressed an
HP V-builders' workshop in CambridgeMA on the subject about six years ago).
Very large reductions in drag coeffi-cient can be obtained by shaping a bodyso that it produces laminar, instead ofturbulent, flow in the boundary layer -the air right against the surface. Here isan example taken from the paper show-ing the very large drag penalty from tur-bulent flow.
While one can use advanced com-putational fluid mechanics to design en-closures to produce laminar flow, inpractice there are many differences be-tween the theoretical and actual condi-tions. Thus being able to see wheretransition to turbulence occurs gives thefairing builder the knowledge of whereto change the shape or the roughness topreserve laminar flow.
The advantages of liquid-crystalcoatings vs the traditional sublimatingchemicals, china clay and oil coatingsare the reversibility of the indications,the greater clarity of the display, and thelow toxicity. The surface is first paintedmatte black, and then a liquid-crystalfilm is sprayed on. Colors indicate skinfriction. Refer to the full paper for de-tails of where to get the liquid crystals,etc. (Reviewed by Dave Wilson).
-. 8-. 4
C 0Cp .4.81.2
.006
Cf .004
.002
0
Upper
Lower
p I I I
Turbulent
Laminar
~ -t I I/ I I
-I
0 .2 .4 .6 .8 1.0X/C
,kin-friction and pressure distributionsfor a NACA 671-215 airfoil
p. 20 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4---------�

Design for a wind+human-poweredquadracycleby Wally Flint
This vehicle uses a pedal drivemechanism similar to a bicycle but aug-ments the power with symmetrical air-foils extending vertically from thevehicle (with the leading edges pointingforward). Airfoils are more efficient thansails, permitting higher speeds, but sailsprovide greater power at low speeds. Forthis application airfoils are preferablebecause we can use human power toreach speeds at which the airfoils be-come effective.
vhick moon
iev of Airfoil
Figure 1 DefinitionsIn this article the standard equations
that describe the lift and drag on the air-foils can be found in any textbook onaerodynamics or wings. Figure 1 definesthe terms and angles used in computingthe propulsive force of the airfoils. "Ap-parent wind" (aw) is the vector sum of"true wind" (tw) and "induced wind"(iw). "True wind" is the wind you feelwhen the vehicle is at rest. "Inducedwind" is the wind produced by the mo-tion of the vehicle. Note that theinduced-wind vector always has thesame magnitude as the vehicle-velocityvector, but is pointed in the oppositedirection. "awA" (apparent wind angle)denotes the angle between the apparentwind and the vehicle's path of motion;twA (true wind angle) the angle betweenthe true wind and the path of motion."L" is lift and "D" is drag.
To understand where the propulsiveforce comes from note that lift is bydefinition the force which is at rightangles to the oncoming airstream(apparent wind). Similarly, drag is bydefinition the force which is in the samedirection as the apparent wind. If the ap-
parent wind angle (awA) is large enoughand if the lift-to-drag ratio is largeenough then the net force produced bythe airfoil will have a forward compo-nent (although it will also have a muchlarger side component). Thus, the forceson this vehicle are exactly analogous tothe forces on a sailboat - the only differ-ences being that airfoils are used to gen-erate the forces instead of sails andwheel friction is used to resist the sideforce instead of a centerboard.
It should be possible to rotate the air-foils as a unit, so that the leading edgescan point to the right or left as in figure2. Thus when awA becomes larger thanthe stall angle for the airfoils, one cansimply point the airfoils more in thedirection of the apparent wind.
For a given magnitude of apparent-wind, the smaller the awA the smallerthe forward component of lift. In the fol-lowing equations I will assume that awAis less than the stall angle and thereforethe airfoils will be pointed directly for-ward. In this case the airfoil angle of at-tack is equal to awA. The followingformulas give the awA and the magni-tude of the apparent wind vector (lawl):
tw sin(twA)awA=arc tan twcos(twA)
iw+ttw cos(twA)]
[aw] = twsin(twA)[aw] awAsin awA
(1)
(2)
Figure 3 gives data at low Reynoldsnumbers for the E-169 airfoil') and fig-ure 4 gives the airfoil coordinates. In ourcase if we assume a chord of about 200
Figure 2 Rotatable airfoils
Airfoil-vehicle arrangement
mm (0.6 feet) and an apparent windspeed of about 13.5 m/s (30 mph) thenthe Reynolds number Re=p[aw](chord)/g =187,000 where p isthe density of air (1.24 kg/cu.m.) and .tis the absolute viscosity of air (1.79x10 5
Ns/m 2 ).The lift of a single airfoil is
L = C, 0.5 p area lawl2 where Cl is thelift coefficient and "area" is the area ofthe wing. From figure 3 the lift coeffi-cient is equal to 0.1 awA (awA in de-grees). Then L = 0.062 awA area lawl 2.
The actual lift will be less than thatdescribed by the above equation becauseof the close proximity of the other air-foils. If two wings are separated by adistance of 1.5 times the chord length,then the resulting lift generated by eitherwing is equal to 0.92 times the lift pre-dicted by the above equation (2 ). This ap-plies to two wings. I don't know whatthe correction factor is for three or fourwings. These additional wings are a dis-advantage in that they no doubt makethe 0.92 correction factor even smaller.There are, however, some advantages tohaving more than one wing. For onething the vortices from adjacent wingtips tend to cancel each other whichtends to lower the induced drag. Anotheradvantage is that the equations we willbe using to calculate drag assume thatboth wing tips are away from any ob-structions, but in our case the lowerwingtip is close to the ground and, inaddition, it may terminate into the bodyof the vehicle. Both of these factors tendto further reduce the effect of wing-tipvortices. Thus I will assume that theseeffects will make up for the fact that the0.92 correction factor may be too largewhen using more than two wings. Inaddition, we will find that there isenough room to separate the airfoils by a
Human Power, fall & winter, 1991-2, vol. 91/3 & 9/4, p.21
- I


NR X/T YO/T
1 1.000002 0.998933 0.995724 0.990395 0.982966 0.973477 0.961948 0.948449 0.93301
10 0.9157311 0.8966812 0.8759213 0.8535514 0.8296715 0 8043816 0 7777917 0. 7500018 0 7211419 0 6913420 0.6607221 0 6294122 0.5975523 0 5652624 0 5327025 0.5000026 0.4673027 0.434742G 0.4024529 0.3705930 0.3392831 0.3086632 0.2788633 0.2500034 0.2222135 0.1956236 0.1703337 0.1464538 0.1240839 0.1033240 0.0842741 0.0669942 0.0515643 0.0380644 0.0265345 0.0170446 0.0096147 0.0042848 0.0010749 -0.00000
0.000000 000060.000270.000730.001470.002480.003690.005030.006490.008080 009860. 011870.014110.016600 .019340. 022310.025520. 028930.032520.036260. 040110. 044010.047930.051790. 055530. 059080 062380.065330. 067860.069670. 071270 071960 071890 071070. 069520 067230. 064220. 060520 056180. 051310. 045970 040250 034410. 028210 022500.016040.010110 005000 00000
YU/T
0. 00000-0.00006-0 00027-0.00073-0.00147-0.00248-0.00369-0 00503-0. 00649-0.00808-0. 00986-0.01187-0.01411-0.01660-0 01934-0.02231-0 02552-0.02893-0. 03252-0.03626-0.04011-0. 04401-0. 04793-0. 05179-0.05553-0 05908-0. 06238-0.06533-0.06786-0.06987-0.07127-0.07196-0.07189-0.07107-0.06952-0.06723-0 .06422-0.06052-0.05618-0.05131-0.04597-0.04025-0.03441-0. 02821-0.02250-0.01604-0. 01011-0.005000.00000
DICKE/T...= 0.144 RUECKLAGE/T=
WOELBUNG/T= 0.000 RUECKLAGE/T=PROFILTIEFE...= T
0.2790.001
Figure 4 Profile E 169 coordinatesfrom ref: 1
Later I will show that the top speedof the vehicle is maximized when span =2.18 m and chord = 178 mm. For nowsimply note that these values satisfyequation 8. At the local U-haul rentalplace I found out that a small U-haultruck requires 2.64 m clearance. If weassume that the lower tips of the airfoilsare going to be about 300 mm off theground, then a span of 2.18 m wouldgive us a vehicle that is not quite as highas the small truck. What about thewidth? My Ford F-150 pickup is 1.93 m
wide. This gives us room to space theairfoils about 600 mm apart. The 0.92correction factor included in equation 3assumed the airfoils were separated by adistance equal to 1.5 x chord, but herewe have separated them by a distance of3.4 x chord.
Equation 8 seems to state that theairfoils will supply a forward force equalto the backward force of wind resistanceat any vehicle speed (any value of lawl2).But remember that as the speed of thevehicle increases, the awA decreases.The maximum vehicle speed for which
our equations are valid is that speedwhich reduces the awA to 9 degrees. Afurther increase in speed will result inawA < 9. Beyond this speed we cannotexpect the forward force of the airfoilsto balance the backward force of thewind resistance.
How often will we encounter "goodwind conditions"? Look at figure 1.Hold the wind speed (tw) and vehiclespeed (iw) constant and then rotate thetw vector through 360 degrees. At whatvalues of twA is awA < 9? Equations 9and 10 (which were derived by applyingthe law of sines to figure 1) help us toanswer this question. The answer de-pends on the relative magnitudes of twand iw. There are three situations whichoccur.
l.iw< twWhen iw < tw, there will be a range
of values of twA, symmetrical abouttwA = 0, such that whenever twA iswithin this range the magnitude of awAwill be less than 9 degrees. This range ofvalues of twA (in degrees) is given byequation 9 with awA,,) = 9 degrees.Equation 10 (also using awA,) = 9)gives a negative answer when iw<tw,and this negative number should be dis-carded.
2.(tw/sin(9)) > iw > tw.In this case there will two ranges,
one symmetrical about twA = 0 as be-fore, and another symmetrical about twA= 180. Equation 9 gives the range sym-metrical about twA = 0. Equation 10gives the range symmetrical abouttwA = 180.
3.iw>(tw/sin(9))In this situation awA < 9 for all val-
ues of twA; the two ranges have mergedwith each other and equations 9 and 10have no solution.twA range = 2 arc sin(iwsin(awA)/tw)
+ 2 awA (9)twA range = 2 arc sin(iwsin(awAm.)/tw) - 2 awAm. (10)
Let us consider a wind speed of 6.7m/s (15 mph) and a vehicle speed of13.4 m/s (30 mph). Equation 9 statesthat the range symmetrical about twA =0 is 54.5 degrees. Equation 10 states thatthe range symmetrical about twA = 180is 18.5 degrees. If the direction of theroad is random then we will encounter atwA fallino into one of these regions
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p.23
____ __ _ ___ __

((54.5+18.5)/360) = 20% of the time.Perhaps it would be better to say howoften we will encounter a value of twAgiving awA greater than 9 instead of lessthan 9. This would give us a roughevaluation of how often we can expectto encounter "good wind conditions".The accompanying table presents thisfigure at various wind speeds and ve-hicle speeds. The table should be read asin the following example (using thewind speed = 15 mph row and the ve-hicle speed = 40 mph column): when thewind is 15 mph, we should be able todrive at 40 mph 73% of the time. (Thisassumes that the driver provides onlyenough power to overcome the rollingresistance of the vehicle.)
At awA = 0 the airfoils do nothingbut increase the drag. It's easy to figureout how often the airfoils contributesome forward force (NFF > 0). Recallingequation 6 for the NFF of a single air-foil:
NFF =[(0.000998 awA2 span chord) -(0.00217 awA2 chord2)-0.0155 spanchord)] [aw2 ] (6)
NFF is positive when the expressionin the brackets is positive. Putting span= 2.18m and chord = 0.178m into thatexpression gives:0.0003185 awA2 - 0.006015 .The minimum value of awA for whichthis expression is positive is awA = 4.35degrees. Consider a typical bicyclespeed of 6.7 m/s (15 mph) and a windspeed of 2.2 m/s (5 mph). Equation 9with awA = 4.35 gives 35 degrees;equation 10 gives 17.6 degrees. We ex-pect to encounter awA<4.35 about((35+17.6)/360) = 15% of the time.Thus, with a wind of 2.2 m/s (5 mph),we can expect to drive 6.7 m/s (15 mph)85% of the time without the airfoils add-ing additional drag to the vehicle.
Suppose we are going directly intothe wind (awA = 0). How much is thedrag increased by the airfoils? PuttingawA = 0 into equation 6 (and remember-ing to multiply by 4) we get:4 NFF= -0.00222 Iawl2. Dividing thisby the equation for wind resistance(equation 7) shows that the wind re-sistance will be increased by 30% atawA = 0.
Now let's address the issue of speed.We know from equation 8 that the air-foils will at least counterbalance the
PERCENTAGE OF TIME PROPULSIVE FORCEBALANCES WIND RESISTANCE
tw(mph)
5
15
69%
10 85%
15 90%20 91%
25 92%
20
57%
80%
87%
90%
91%
wind resistance at any vehicle speed andany wind speed as long as awA 9.Thus, given a fixed true wind speed anddirection, the vehicle speed is limited tothe value which causes awA to equal 9.Applying the law of sines to figure 1gives equation 11, which tells us whatthe vehicle speed will be when awAreaches 9 degrees.speed limit = iw = tw (sin(twA-9)/sin(9))(1)
The speed is also limited to the valuewhich causes the lift to become so largethat it causes the vehicle to topple over.The vehicle will begin to topple overwhen the torque of the airfoils about thewheels on one side is equal to the torquedue to the weight of the rider and ve-hicle (see figure 5).
If the vehicle and rider weigh 890N(200 pounds) the torque will be3.0.963x890 = 859 N-m. For a given air-
torque
vehicle speed (mph)25 30
43%
74%
83%
87%
90%
22%
69%
80%85%
88%
40
0%
57%
73%
80%84%
foil, the component of lift that points di-rectly to the side is L cos(awA) (seefigure 1). If the lower tips of the airfoilsare 300 mm (1 foot) off the ground thenan integration of the torque at eachheight will show that the net torque pro-duced by all four airfoils is 5.578Lcos(awA). We write 5.578L cos(awA) =858.7 to get the maximum allowable L.In the equationL = 0.057 awA span chord awl2 ,
the value of awA will always be 9 de-grees. This is because awA is reallyangle of attack in this equation. SinceawA will be greater than 9, the airfoilswill be turned into the wind until theangle of attack is equal to 9. (If awAwere less than 9 then the speed wouldhave already been limited by equation11.) But we cannot use awA = 9 when itshows up in other places, such as
f airfoil
y
torque componentof veight W cos( theta )
veight
theta
(distance from0.3 ground to driver)
0.965(distance from point vhere
wheel touches road to driver)
x
f2.48torque for airfoil located - L cos(avA)a distance of x feet from wheel 2 18 y dy
The above analysis shows that the torque exerted about a Vheel by an airfoil is 0.3not a function of the distance between the airfoil and the vheel
Figure 5 Toppling forces on wind-powered vehicle
p. 24 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4





achievable on the Mk 4 machine de-scribed above. The bare-HPV drag coef-ficient of 0.92 for the Mk 3 prototypeagreed well with the value of 0.91 deter-mined in 1/5th-scale wind-tunnel tests(Amor, 1989) of a geometrically similarmodel.THE VEHICLE ENERGY-CONSUMPTION SIMULATION
Driving-cycle energy consumptionfor the HPV was simulated using a ve-hicle energy-consumption model (Raineand Epps, 1988) developed for use inconjunction with the University of Can-terbury methanol-fuel research pro-gramme.
The computer model, written in Wa-terloo Fortran 87 and run on an IBMPC/AT, steps through standard fuel-consumption and emissions drivingcycles, calculating the required road-load power at one-second intervals. Theroad-load simulation can include con-stant, V- and V2 -dependent coefficientsof rolling resistance, and builds in heador tail wind. It can also model the ef-fects of driver error in following thedemand-velocity-versus-time path.
For the purposes of the present workthe computer model was run using the
simplified road-load power equation 2,and assumed zero driver error in the fol-lowing of driving cycles. The total ener-gy consumption over a driving cycle, the
cycle energy, CE, is determined by tak-ing the following sum:
CE = cyceP.t (3)
where t = 1-second interval.Note: If P becomes less than zero atany time under deceleration, it is set tozero for the calculation in equation 3.
Using simple menu commands, theoperator may change any of the vari-ables in the road-load equation, and mayalso do perturbation studies in which thesensitivity of the cycle energy consump-tion (CE) to changes in individual pa-rameters is evaluated. The model alsogives a breakdown of the percentage ofCE used in overcoming inertia, rollingresistance, aerodynamic resistance andgradient.
The model was run with three driv-ing cycles, for which data are given intable 2. The modified AS 2077 (1979)urban and highway motor-vehicle driv-ing cycles, and the Christchurch bicycle-urban-commuter driving cycle are illus-trated in figure 6. The most relevant isthe last of these, which represents a typi-
VEHICLECONFIGURA
TABLE 1:
,TION
1 Bare HPV
2 HPV + FrontFairing only
3 HPV + FullFairing
4 Touring Cyclist
5 HPV - Mk 4Development
FA
VEHICLE ROAD-LOAD DATA'RONTAL\REA\ m2
0.45
0.54
0.55
0.53
0.54
ROLLINGRESISTANCE
CR
0.006
0.006
0.006
0.004
0.006
AERODYNAMICRESISTANCE
CD
0.92
0.51
0.67
1.00
0.40
TOTALMASSM kg
98
107
111
89
105
Note: 1. In each case the rider was a male of 188 cm height and 78 kg weight.2. To the 20 kg bare mass, the frontal half fairing added 7 kg and the full
fairing 13 kg. 2 kg extra mass is present as rear panniers on HPV 2.3. The future Tricanter, with full aerodynamic fairing, is projected to
achieve a drag coefficient of 0.4, with 17 kg bare vehicle mass and10 kg aerodynamic fairing.
cal journey from Amor's residence to theUniversity. The cycle is over almostflat terrain, about 20% of the distancebeing through city streets (officeblocks), and the remainder through sub-urban areas (low-density low-rise resi-dential buildings). Ten sets of trafficlights are negotiated. The cycle was re-corded using a video camera mounted onthe Tricanter HPV to log speed and timefrom on-board instruments.
Our objective in the HPV energy-consumption modelling was to compareCE for different configurations of theTricanter and for a touring bicycle. Afurther aim was to look at the effect ofroad gradient and head wind.
RESULTS AND DISCUSSIONResults are given in table 3 for the
computed reference cycle energy, CE,for each of the five vehicles, on a flatroad with no ambient wind. Energy con-
sumption for the bare HPV is the datumagainst which other vehicle configura-tions are compared.
Table 3 shows that the HPV withonly the front half fairing gives a sub-stantial reduction in CE for all threedriving cycles. It is also clear that theextra mass of the full aerodynamic bodyis unacceptable unless accompanied by alarge drop in drag coefficient. The bi-cycle is seen to consume more energythan the bare HPV, but ridden in a fullracing crouch, with reduced CD and fron-tal area, A, it would have a slightly low-er CE than the bare HPV. The projectedMk 4 Tricanter, 15% lighter, with a 13%lighter full aerodynamic body (CD =0.4),achieves better than 22% lower CE thanthe bare HPV over the ChristchurchCycle.
The results in table 3 also reflect theaverage speed of the respective cycles.Inertial energy consumption is relatively
TABLE 2: DRIVING-CYCLE DATA
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p.29
DRIVING CYCLE
PARAMETER CHRISTCHURCH MODIFIED MODIFIEDBICYCLE AS2077 AS2077
URBAN HIGHWAY
Distance km 6.67 5.23 5.61
Cycle Time sec 1200 1256 766
Max Speed km/hr 30.0 31.4 32.7
Av. Speed km/hr 20.0 15.0 26.4
Note: Speeds in AS 2077 Urban Cycle are reduced by a factor of 0.56, .and in AS 2077 Highway by a factor of 0.34 to achieve the modifiedform. AS 2077 Urban also has the period of the cycle from t = 198sec to t = 316 sec removed to avoid unrealistically high speeds.
- I

MODIFIED AS2077 URBAN CYCLE
0 200 400 600 800 1000
TIME t
1200
seconds
MODIFIED AS2077 HIGHWAY CYCLE
0 200 400 600 800 1000
TIME t seconds
1200
CHRISTCHURCH BICYCLE CYCLE
200 400 600 800 1000
TIME t
1200
seconds
Figure 6 Vehicle energy consumption in driving cycles
greater in the two urban cycles, whilstaerodynamic drag is more important inthe AS 2077 highway cycle which isrepresentative of energy consumptionfor cycle touring on the open road.
The proportions of cycle energy con-sumed in inertial acceleration, rolling,and aerodynamic resistances are shownfor the flat road/still air case in table 4.We were particularly interested in study-ing the effect of gradient and head-windperturbations to the model when decid-ing whether to include an aerodynamicbody on the Tricanter for general use.
To explore gradient, the model wasrun with constant gradients ranging from0% to 10%. The gradient effect is verystrong. CE values relative to CE I areplotted against gradient in figure 7. CE 1is the Cycle Energy for vehicle 1, at gra-dients G%, given byCEI = 138.7{1 +46.2G/(100 2 +G 2)'
kJ (4)It is seen that the CE advantage held
by the (necessarily heavier) vehicleswith aerodynamic fairings is eroded asgradient increases, due to the extra workto be done against gravity. At very steepgradients, the gravitational load domi-nates, so that CE relates quite closely toall-up mass.
At a gradient of about 2.8% the bi-cycle, vehicle 4, starts to undercut thebare HPV, vehicle 1, which in turnachieves a lower CE than vehicle 2 withthe front half fairing for gradients over3.4%. Vehicle 5, the future develop-ment of the HPV, maintains an advan-tage in CE until a gradient of about 5%is reached, where the bicycle becomesthe most energy-efficient machine. Thebicycle, being lightest, comes into itsown on climbing steep hills.
For each of the five vehicles, thecomputer model was run with headwinds, Vw, ranging from 1 to 20 km/hr(0.278 to 5.56 m/s). CE values areplotted against head-wind speed for theChristchurch bicycle cycle in figure 8,relative to CE for the bare HPV in stillair. Figure 8 shows that the advantageenjoyed by the HPV with the front halffairing gradually increases as the headwind increases. The cyclist riding withstraight arms on a sports bicycle is at anincreasing disadvantage. Predictably,the vehicle with best aerodynamic-dragcharacteristics copes best with the headwind.
The comparisons made in figures 7and 8 make no reference to duration of
p. 30 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
E
Ca
LXInW0-
30
E25
20
15
CxLU-
Ln10
5
00
S;R

TABLE 3: PERCENTAGE CHANGE IN ENERGYCONSUMPTION, CE, COMPARED WITH BARE HPV
TABLE 4: PROPORTIONS OF BASIC CYCLE ENERGYCONSUMPTION, CE, CONSUMED BY VARIOUS
COMPONENTS OF VEHICLE ROAD LOAD, percent.
human power output at various powerlevels, or to vehicle drive-train losses.Kyle and Caiozzo (1981) give a table oftransmission efficiencies from which98% may be taken as an average figureto apply here. Kyle and Caiozzo (1981)also graph duration of human power out-put for tests on a number of average rec-reational cyclists ranging in age from 20to 47 years old. Standard and modifiedbicycle ergometers were used. The dura-tion curve for an average of five cyclistsis reproduced in figure 9. The averagecyclist can maintain about 0.27 kW overthe 20-minute duration of the Christ-church bicycle cycle, ignoring speedvariations which will make the cyclemore arduous in reality. For the bareHPV driven over the Christchurch cycleon a flat road in still air, the CE of 138.7kJ corresponds to an average power dis-sipation at the road of 0.1 16 kW, or0.1 18 kW allowing for drive-train losses.In figure 7, an average power of 0.27kW over the Christchurch bicycle cyclecorresponds to a gradient of 2.8% (atwhich peak power from rider = 0.43 kWat 30 km/hr) or a relative CE of 2.29 forthe bare HPV. Other test data (Whitt &Wilson, 1982) indicate that a first-classathlete might average about 0.38 kWover the same 20-minute cycle.
Limits on duration of human poweroutput mean that comparisons of CE fordifferent vehicles are probably relevantonly for gradients less than about 3.5%for the conditioned cyclist. Whilst gra-dients up to 3.5% tend to level the per-formance of vehicles 1, 2 and 4, a lightvehicle with good aerodynamics such asvehicle 5 will still be more energy effi-cient. The light bicycle remains the ulti-mate steep-road HPV.
The maximum head wind of 20km/hr corresponds to an average poweroutput from the rider of the bare HPV ofjust under 0.27 kW. It would thereforeappear that all vehicles except the bi-cycle, vehicle 4, could complete theChristchurch cycle into a 20 km/hr headwind, but with a maximum road speedtouching 30 km/hr, peak power outputfrom the rider of the bare HPV would beabout 0.47 kW. i.e. higher speeds duringthe cycle would test the stamina of therider.
Conclusions above regarding per-formance of the different vehicles ex-ecuting the driving cycle in a head windor on an incline must be treated as in-dicative only, in view of speed varia-
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p.31
ENERGY CONSUMPTION DRIVING CYCLEVEHICLE
CONFIGURATION CHRISTCHURCH MODIFIED MODIFIEDBICYCLE AS 2077 AS2077
URBAN HIGHWAY
Reference CE forBare HPV 138.70 kJ 120.82 kJ 120.70 kJ
1 Bare HPV 0% 0% 0%
2 HPV + Front -14.37% -8.14% -21.20%Fairing only
3 HPV + Full -0.87% +2.89% -4.66%Fairing
4 Touring Cyclist + 10.03% +5.12% + 15.59%
5 HPV- Future -22.40% -14.76% -31.59%Development
RESISTANCE: ENERGY CONSUMPTIONI = INERTIAL DRIVING CYCLER = ROLLINGR ROLLING CHRIST- MODIFIED MODIFIEDA = AERODYNAMIC CHURCH AS 2077 AS2077
BICYCLE URBAN HIGHWAY
VEHICLE % % %CONFIGURATION CE CE CE
1 Bare HPV I 19.71 39.59 4.01R 26.69 21.26 27.08A 53.60 39.15 68.91
2 HPV + Front I 30.69 49.17 6.95Fairing only R 30.43 23.48 35.49
A 38.88 27.35 57.55
3 HPV + Full I 23.96 44.72 5.27Fairing R 28.69 22.09 30.67
A 47.35 33.19 64.06
4 Touring Cyclist I 16.29 33.72 2.84R 21.24 17.94 20.56A 62.47 48.34 76.60
5 HPV- Future I 35.51 52.91 8.74Development R 32.02 24.41 39.72
A 32.47 22.68 51.54

tions during the cycle and limits onduration of human power output.
A MOTORISED TRICANTER?The Mk 1 Tricanter prototype was
run with a 49-cc Velo Solex moped en-gine mounted over the 27-inch rearwheel. The high position of the engineresulted in some sway on corners, butgood straight-line performance. Addi-tion of a similar wheel-friction-drivemotor over a larger-section 20-inch tyreon the rear wheel of the Mk 3 Tricantercould give a very workable vehicle withgood handling and braking combinedwith a cruising speed of 30 kmn/hr. A49cc-engined version of the vehiclecould afford the bulk of a more refinedaerodynamic body, and enjoy the sim-pler vehicle licensing and design rulesattaching to under-50cc vehicles.
CONCLUSIONSThe Tricanter commuter HPV devel-
opment project has led to a compact androbust recumbent tricycle with excellentcornering and braking characteristics.Road testing and computer simulation ofthe vehicle in different aerodynamicconfigurations have shown that the barevehicle should have slightly lower ener-gy consumption than a low-handlebarsports bicycle ridden in a straight-armtouring position. Results also show thatthe addition of an aerodynamic body canreduce energy consumption over typicaldriving cycles provided that the aerody-namic drag coefficient is low enough tooffset the effect of added body mass.Vehicles with aerodynamic bodies showa predictable advantage in head winds.On inclines, the heavier more-aerodynamic vehicles suffer, but can re-tain an advantage over the bare vehicleif they are low enough in CDA. For ex-ample, a vehicle of total mass 29 kg,with 78-kg rider and C DA less than 0.28m2 would consume less energy than an11-kg bicycle for the Christchurch bi-cycle driving cycle executed on gradi-ents up to about 3.5%.
ACKNOWLEDGEMENTSThe authors gratefully acknowledge
the contribution of the following stu-dents who carried out prototype develop-ment and testing: K.C. Brand, L.B.Crockett, S.J. Howman, G.D. Irving,P.M. Kelly, D.N. Lovegrove, P.J.McMillan, P.M. Wilkinson.
LUI
U
(20:
zW
U
UL.J
UJck
GRADIENT %
U 2 4 6 8 I0 12 14 16 18 20
HEAD WINrD SPEED <km/hrFigure 8 Influence of head Bwind on cycle energy
1.2
0.8
0:
(-D
0
LUJ
0
zD:
I
0.6
0.4
0.2
10--1 100
DURATION OF POWER OUTPUT - MINUTES
Figure 9 DuIration of human power output (after Kyle & Caio-zo. 1981)
p. 32 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
L
101
I i- - - l l i[ -- l -
T
-- l I I I I I i i l I i iiI .
I I.e
])
_.............. , ........
_ ..... . .. .. ,....... ..... ..... .... --- ...A> -·
n

REFERENCESAmor, M.R. (1989) ENERGY CON-SUMPTION MODELLING FOR HPV,Bachelor of Engineering Project ReportNo.2, Department of Mechanical Engi-neering, University of Canterbury,Christchurch, N.Z.AS2077 (1979) METHODS OF TESTFOR FUEL CONSUMPTION OF PAS-SENGER CARS AND THEIR DERIV-ATIVES, Standards Assn. of Australia.Damam, Stoudt, McFarland (1966) THEHUMAN BODY IN EQUIPMENT DE-SIGN, Harvard University Press.Gross, A.C., Kyle, C.R., and Malewicki,D.J. (1983) THE AERODYNAMICSOF HUMAN-POWERED LAND VE-HICLES, Scientific American, vol. 249,no. 6.Hindin, P.J. and Raine J.K.(1986) VE-HICLE TESTING WITH ALTERNA-TIVE FUELS - HOW AND WITHWHAT?, Proceedings of 1986 Interna-tional Conference of the Society of Au-tomotive Engineers - Australasia Inc.,Auckland, N.Z., 20 - 26 March 1986, pp352 - 380.IHPVA (1986), Proceedings of the 3rdInternational Human-Powered VehicleScientific Symposium and 12th AnnualHuman-Powered Speed Championships,IHPVA, Expo 86, Vancouver, Canada,28 - 29 August 1986.Lovegrove (1991) OPTIMISATIONAND DEVELOPMENT OF THE HU-MAN POWERED VEHICLE, Bachelorof Engineering Project Report No.66,Department of Mechanical Engineering,University of Canterbury, Christchurch,N.Z.Kyle, Chester R., and Caiozzo, VincentJ. (1981) EXPERIMENTS IN HUMANERGOMETRY, Proceedings of the IstInternational Scientific Symposium onHuman-Powered Vehicles, Anaheim,California, USA., November 1981.McMillan, P.J. (1988) THE DESIGN,CONSTRUCTION & TESTING OF ANAERODYNAMIC FAIRING FOR THEHPV, Bachelor of Engineering ProjectReport No.56, Department of Mechani-cal Engineering, University of Canterbu-ry, Christchurch, N.Z.Raine J.K., Crockett, L.B., Irving, G.D.and Wilkinson, P.M. (1986) DESIGNTO ENJOY - A HUMAN-POWEREDVEHICLE, Paper presented at theIPENZ Annual Conference, Auckland,N.Z., February, 1986.Raine, J.K. and Epps, I.K. (1988) VE-HICLE ENERGY CONSUMPTION
MODELLING, Proceedings of IPENZAnnual Conference, New Plymouth,N.Z., February 1988, vol. 2, pp 323 -334.SAE J1263 (1980) ROAD LOADMEASUREMENT AND DYNAMOME-TER SIMULATION USING COAST-DOWN TECHNIQUES", SAERecommended Practice, Society of Au-tomotive Engineers, Inc., 400 Common-wealth Drive, Warrendale PA 15096,USA.Whitt, F.R. and Wilson, D.G. (1982) BI-CYCLING SCIENCE, Cambridge, Mas-sachusetts, The MIT Press.
John K Raine, School of Engineering,University of Canterbury, Christchurvh,New Zealand, FAX 64 3 642- 705 phone667-001
RICHARDS' ULTIMATEBICYCLE BOOK
A book review by Dave Wilson
Richard Ballantine has been joinedby Richard Grant in the lavish produc-tion of the latest edition of his book onbicycles and bicycling, thereby changingthe position of the apostrophe in thetitle. Richard Ballantine produced his"Richard's Bicycle Book" in 1972, and,according to a note on the cover, it hassince sold over one-million copiesworld-wide. That is strong testimonyboth to the quality of his writing and tothe interest in bicycling.
Ballantine has also done much forthe HPV movement. I first met himover ten years ago in Germany where wewere attending a bicycling conference inBremen. We appeared on German TV.I had brought with me an Avatar 2000which I demonstrated to, apparently,good effect. Several were later boughtby various people in Europe, and smallcompanies were started to produce re-cumbents with strong similarities. Ri-chard Ballantine bought one for himself.He had it reviewed for his new magazineBICYCLE! This review was, I believe,the longest, most thorough, and most en-thusiastic ever devoted to a new bicycle.The entire color cover of the issue wasgiven to the Avatar and a very strikingmodel. Ballantine's Avatar was bor-rowed by Derek Henden in London whodesigned a fairing for it, renamed it theNosey Ferret and, later, Bluebell, and,with a vacationing Australian lawyer,Tim Gartside, riding began winning al-
most all the races they entered, first inEurope and then at the IHPSC in theUSA. Ballantine's Avatar thereby endedthe supremacy of the Vector recumbenttricycles in the 200-m speed champion-ships and in other events. In his maga-zine and his books, Richard Ballantinehas spread his enthusiasm for HPVs aswell as for bicycles, and to him must begiven a large part of the credit for thenew sport of HPV racing in Europe andelsewhere.
In the "Ultimate Bicycle Book"HPVs are an integral part from the coverflap on. It is the most beautifully illus-trated bicycle book on the market, withphotographs that have to be described asstunning (the photography is by PhilipGatward, and appears to be almost en-tirely specially done for the book). Thetreatment of the various types of bi-cycles for different types of racing andrecreation is also broader than I haveever seen: it is almost encyclopaedic. Ihave never been able to find a good defi-nition of criterium racing, for instance,but it is given a two-page spread here,with more on time-trial bikes, on theTour-de-France bikes, and much onmountain bikes. The material is up todate, with good authoritative informa-tion on frame and wheel design and ma-terials. HPVs have far less thanexhaustive treatment, but there are threeshort sections. There is more than inany other general book on bicycles.
The only sour note to mar this paeonof praise is that I wish the authors hadasked a bicycle historian to check thesection on bicycle evolution. They re-peat the oft-debunked myth about theunsteerable two-wheeled "celerifere"supposedly invented by de Sivrac.There was no such vehicle. (I confessthat I have helped in some measure toperpetuate the myth of the existence ofany form of unsteerable "bicycle" in Bi-cycling Science. And I did have mychapter checked by a bicycle historian).Also, the name of the rider, Faure, of therecord-breaking Velocar recumbent ofthe thirties is misspelled.
In other respects, this beautiful bookis a delight. It is informative and enter-taining. At $29.95 it could be regardedas a bargain. It is bound to lead to great-er acceptance of HPVs. For this alonewe owe Richard Ballantine and his co-author Richard Grant (a rival bicycle-magazine publisher) a debt of gratitude.
Dave Wilson
Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4, p.33

by CoryTwo years ago seventeen teams (of
the nineteen teams that registered) gottogether to race submarines around a1,000-meter kidney-bean-shaped course.Due to logistics, foul weather, and tech-nical problems, only a 100-meterstraight-line sprint was run. Only nineof the seventeen teams arrived able tofinish.
This year the weather cooperated.Thirty-four of the 36 submarines thatentered were in West Palm Beach, Flori-da ready to race.
The races are organized by the H.A.Perry Foundation and are intended tospark an interest in ocean engineeringand to foster advances in hydrodynam-ics, propulsion, and life support for sub-sea vehicles. The entries came fromlarge corporations, small businesses,universities, and even garage tinkerers.The teams flew from as far as Berlin,Germany and drove from as far as Van-couver, British Columbia.
In the fall of 1990, I and thirteen oth-er University-of-Washingtonmechanical-engineering students got to-gether and decided to work on an entryfor the 1991 race. The result was theSeaDAWG (figure ). It was quicklydiscovered that designing and building asubmarine is a very time-consuming pro-cess. Like many of the teams down inFlorida we had the occasional all-nightwork party.
General rules and course descriptionThe submarines were required to
have two occupants: a pilot and a pro-pulsor (the "stoker"). The pilot was notpermitted to input any power that wouldcontribute to the forward momentum ofthe submarine. He (or in a couple ofcases she) was in charge of steering,navigation, trim and ballast, and lifesupport. The stoker's job was to be theengine: he was not permitted to engagein any other activities.
Both occupants had to be fully en-closed, and the submarines were re-quired to be fully flooded. This meantthat the occupants had to use SCUBAgear. Each submarine had to have 150%of the amount of air necessary to run the
Brandtcourse, as well as having a separate tankfor ballast. The air pressure was mea-sured just before and just after runningthe course. If there was not enough ex-cess the competitors were to be disquali-fied.
Each submarine was allowed onepractice run down a 100-meter straight-line course. A timed 100-meter sprintwas run and the time achieved deter-mined the seeding. The fastest eightsubmarines were given a by for the first
these rules the surface buoys created themost problems.
Description of entriesThere were many different hydrody-
namic theories put to use. Some, likethe Borti I from Berlin, attempted tomake their submarine as small as possi-ble. By making the submarine smallthey decreased the wetted-surface areaand the frontal area, which reduce thedrag. Others made their hulls a littlelarger but strove to eliminate boundary-layer separation (such as the SeaDAWG)or to have a mostly laminar-flow body(such as Team Wahoo).
Most teams strove for efficiency inthe propulsion systems. The majority of
Figure 1 The SeaDA WG
round. If a submarine was not able tocomplete the 100-meter sprint in underten minutes, it was disqualified andthereby eliminated from all further rac-ing.
Initially two submarines were to raceside-by-side going around a 400-meteroval course twice. However, due in partto fear for diver safety, the 800-meterrace was shortened to 475 meters for allexcept the final race.
Rules for safety were fairly stringent.Each submarine had to have a surfacebuoy, an emergency-release buoy with adeadman switch for both occupants (thusif the switch were released the deadmanbuoy would surface alerting surfacecrews of a problem), strobe lightmounted on the submarine, and a sparesupply of air on the person of both occu-pants (most teams used Spare Aires). Of
competitors used a standard bicyclecrank, but some used linear drive sys-tems. Team Wahoo was the only teamto use hand-and-foot cranks.
The majority of the entries used two-bladed propellers. Team Effort used a12-bladed propeller. Using hydraulicstheir pilot could control the blades andsteer the submarine. The SubHuman IIteam was one of about a half-dozenteams to use counter-rotating propellers.
Non-standard propulsionFive of the submarines broke away
from using propellers and went withsomething completely different.
The U.S. Navy's Subdue used a ra-dially extended linear impeller (paddlewheel). It was not very reliable and ac-cording to a member of the Navy's teamit couldn't keep up with the Squid (the
p. 34 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
THE SECOND INTERNATIONAL HUMAN-POWERED-SUBMARINE RACE
FROM THE PERSPECTIVE OF A SeaDAWG
- -


Figure 4 Linear pedal-drive system
stroke and the reduction in the amountof room required inside of the subma-rine. When using a linear system the legsweeps out 30 percent less water thanwith a rotary system. Also the ideal ca-dence for a linear system is approxi-mately 40 strokes per minute while theideal is approximately 60 strokes perminute for a rotary system. Thus a per-son moves about twice the amount ofwater with a rotary drive system thanwith a linear system: this results inwasted energy.
The disadvantages are that they areharder to make as mechanically effi-cient, and parts are harder to attain inmost designs.
Stroke length is also important.Many of the teams had stroke lengths of150-200 mm (six to eight inches). Sosmall a stroke length is very tiring un-derwater (or above water). It is benefi-cial to have a setup such that the stokercan choose the desired stroke lengthwhile racing. This is possible with awell-designed linear drive system.
According to one of the Navy peoplea study on human performance under-
water showed that an above-average ath-lete can sustain 370 watts (0.5 hp) for aperiod of ten minutes. The propellershould therefore be designed for thatpower input (ours was designed using aprevious study that recommended 260watts (0.35 hp).
Lastly, we extensively researchedboth the counter-rotating propeller and aducted propeller and decided to use nei-ther. Although the duct would be niceas a means of protection for the propel-ler, the increase in efficiency was offset
by the increased drag. Having an open-water propeller is also much easier froma manufacturing standpoint. Thecounter-rotating propeller did increasethe overall propeller efficiency but inour opinion it was not enough to over-come the bearing and mechanical lossesor the increased complexity and reducedreliability.
ManeuverabilityMany entries had the dive planes on
the front of the submarine and the rudderon the rear. Some entries adjusted theirpropeller pitch to steer, others angledtheir propeller. A couple of teams usedhydraulics instead of a direct linkage.One consideration when choosing asteering system is its effectiveness whenthe submarine is not moving or is mov-ing very slowly.
3.5
3
2.5
0r 2
u)
1
0.5
0
Life support, trim and ballastAdjusting the ballast during the race
is not a major concern. An 800-meterrace will last less than ten minutes for acompetitive boat. In that time the teamshould not need to make major buoyan-cy changes. We used a single ballasttank in conjunction with a sliding weightsystem (to adjust the trim). This workedwell.
There were many different life-support systems. Some had as little as4.5 cu.m. (160 cu.ft.) and some hadover 14 cu.m. (500 cu.ft.). There wereadvantages to both options. The less airin the submarine the less room was tak-en up by the SCUBA tanks and thesmaller the submarine could be. But thesubmarines with excess air could stay inthe water longer and thereby increasetheir in-water time for testing. Since thetanks will become lighter as the air isused it may be worth considering plac-ing the SCUBA tanks at the center ofbuoyancy of the submarine.
Although not yet approved for use,rebreathers are available. These providemore than enough air and take up muchless volume than the traditional SCUBAsystems. However, they are extremelyexpensive.
Hull shapeDesigning a low-drag hull is not as
easy as it may seem. Most fluid-dynamics courses cover the coefficientof drag over simple two- and three-dimensional shapes. In order to success-fully find a low-drag three-dimensionalshape (within a reasonable time) onemust either rely on the work of others oruse computational fluid dynamics (CFD)to model different alternatives.
6
12
21
31 30 18'
26'29
0 10 20 30 40 50 60 70 80
Displaced Volume (ft^3)
Figure 5 Relationship between displaced volume and average speed
p. 36 Human Power, fall & winter, 1991-2, vol. 9/3 & 9/4
I
I · · 1 I 1

We used CFD to model our subma-rine. We started by using a rotated crosssection of different proven low-dragcable fairings as a basis. Different pack-aging arrangements of the occupants andgear were evaluated using Intergraph (acomputer drafting program) and a sim-ple adjustable plywood mock-up. Aftera few iterations of modifying the inter-nal layout and the hull shape (using aprogram called GEODES) we arrived atour present shape. When it was done wehad a low-drag, space-efficient, andsomewhat cramped submarine.
Figure 5 shows how the displacedvolume affected the speed of the subma-rine. The plotted speed of the Sea-DAWG (number 21) does not reflect theactual speed it could have run thecourse. A competitor's surface buoy be-came tangled around the prop shaft atthe beginning of the race and the boatproceeded to tow both buoys around theremainder of the course. The actual topspeed would have been well over a halfknot faster (probably about 0.5-0.6 m/s -1 to 1.2 knots - faster).
Hull constructionMost teams used fiberglass. Some
used polycarbonate and Lexan, one usedKevlar, and we used carbon fiber. Ourgoal was to minimize the thickness butstill retain the strength. Carbon fiberfulfills this goal very well. It is also al-most as easy to work with as fiberglass.
The majority of the boats were con-structed by first making a plug (or malemold). From the plug a female moldwas made. Then two splashes (or parts)were made using the female mold.These two halves were joined to formthe submarine hull. The advantage ofusing a female mold is that one can at-tain a good surface finish on what willbecome the outside of the submarine.
The choice of material will affect thebuoyancy and the ease of testing thesubmarine. One of the key advantagesof carbon fiber is its high strength-to-weight ratio. This enabled us to have ahull that was about two-millimetersthick in most areas. It was very light(two people could carry it comfortably),extremely rugged (we survived a head-on crash into a piling at over two knotswith no damage), and the hull was closeto being neutrally buoyant (hence wedidn't need a lot of lead or foam as didmany of our competitors). The reducedthickness also meant less wetted surface
area and less frontal area for the sameinternal volume.
Advice to future competitorsOnce again all the teams that partici-
pated learned a lot. Most of the teamswere saying they would be back in twoyears with even smaller submarines. Iplan to assemble a team to compete intwo years.
Testing is crucial. The teams withthe most in-water testing time performedbetter in Florida. This is the predomi-nant lesson.
Reliability is also very important. Ofthe 34 teams that made it to the competi-tion, eleven did not qualify for the elimi-nation races. This was usually due to alack of testing and poor reliability.
The pilots can't race around a coursethey can't see, so make sure the pilot hasenough windows. Many of the entrieshad a hard time seeing the starting lightswhich meant that the other team gotahead at the start. It is important thatthe pilot be able to see in front, side toside, and down, It is also important thatthe rescue diver can see at least one ofthe occupants.
I strongly recommend a communica-tion system between the support crewand the submarine occupants, even if itis only a one-way system. This is espe-cially important if you are testing in anarea with low visibility. One optionwhen testing is to use an underwaterspeaker.
Use a linear drive system if it iswithin your budget and you have themechanical aptitude.
Invest a fair amount of time pickingan arrangement that minimizes the vol-ume, and spend some time choosing alow-drag shape.
Lastly I recommend a launch and re-covery system that can either be raisedand lowered in the water or can raise thesubmarine out of the water. The ideallaunch and recovery system will havethese features and will have steerablewheels.
SummaryThis article is meant to provide some
insight into what happened at this year'srace and what must be done to make acompetitive submarine for the next racein two years. I am open to questions andinsight into human-powered submarinecomponent design.
Questions about future races shouldbe directed to the H.A. Perry Foundationor Florida Atlantic University.
References1. J. Osse, "The human-powered sub-mersible race: A review from down un-der" Human Power Vol. 8 No. 1,Summer 1990 pp. 1, 16-202. M.L. Nuclols, P.K. Poole, R.M.Price, and J. Mandaichak, 1989: "ProjectSQUID, a lesson in design simplicity,"OCEANS '89 Proceedings, Vol. 6, Hu-man Powered Submersibles, IEEE Pub.89CH2780-5, pp.38-423. S.L. Merry, S.L.Sendlein, and A.P.Jenkin, 1988: "Human power generationin the underwater environment,"OCEANS '88 proceedings, Vol. 4, IEEEPub. 88CH2585.8, pp. 1355-1320.4. The 1991 2nd International Subma-rine Races program.5. The final race results handout (fourpages).
Coty Brandt is a recent graduate ofthe University of Washington where hereceived a B.S.M.E. degree. He present-Iy works at the Boeing Company.
Cory Brandt1151 N 82nd St. Seattle, WA 98103,USA (206) 522-7461
FIETS HPV PRIZEThe Dutch bicycling magazing Fiets
is offering a prize of 25,000 Dutch guil-ders for an HPV that is superior to aregular bicycle and that can be ridden365 days of the year. Specifically men-tioned are rain at 3C and a wind of force7. It must have a large carrying capacity(minimum 80 litres and 15 kg) and re-quire little or no maintenance. Theminimum average speed is 35 kph. En-tries are open until January 31, 1993,and judging, including trials of the ve-hicle, will take place in Holland in Feb-ruary 1993.
For details, writeFiets B.V. Publishing CompanyValkenburgerstraat 1881011 NC Amsterdam Netherlands.
Alternatively, send a stamped self-addressed envelope plus an additional29-cent stamp to Dave Wilson, MIT rm3-455 Cambridge MA 02139 and I willask Carolyn Stitson to send you a copy.
Human Power, fall & winter, 1991-2, vol. 9/3 & 914, p.37��


I~~~~~~ ( ,~
c, C , . c, .n cDc a) 4~~~~~~~~~~~C 04C~o~~~~~~~~~~~~o
- ~ . o
~~~~~~~~~~~~a \A ~~~~~~~~~~~~~~EA C
o 8 C~~~~~~~ ooo ,h~~N C3~~~ 5 O~~~~~~~~~. -- : ~:-~= --0 U Ut ,'>,4;BP8 c " ~~~~~·3 ~~~cO~ C C'
S -O~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.4) coca "O Co O.,Q a, o o Q~r , _co~o
6Er. 0 . .
.1
III
:: oO o
Q D0C.)
e. .
9 Z
° O
3 E
, .c = , m
,, - $. $3.
It r-i O
Z lt3E ;tsS> W s ffi
s EJ
i teq Es
,O E
.S, s
"-*a
a
,Zo
a
)Een
"` 'S _ -_ ._ _ t .

International HumanPowered Vehicle
AssociationP.O. Box 51255
Indianapolis, Indiana 46251-0255U.S.A.
(31 7) 876-9478