Embed Size (px)
Citation preview

Comput. Opns Res. Vol. 14, No. 3, pp. 197-208, 1987 0305-0548/87 $3.00 + 0.00 Printed in Great Britain. All rights reserved Copyright0 1987 Pergamon Journals Ltd
EFFICIENT ALGORITHMS FOR THE CAPACITATED CONCENTRATOR LOCATION PROBLEM
HASAN PIRKUL*
Academic Faculty of Accounting and Management Information Systems. The Ohio State University, Columbus, OH 43210, U.S.A.
(Received August 1985; revision received September 1986)
Scope and Purpose-Topological design of computer communication networks is a very complex problem that is generally solved in three phases. The first phase of the design process involves dividing network nodes (terminals) into groups, and selecting a concentrator location for each group so that all the nodes in a group can be assigned to the same concentrator without violating its capacity constraint. The next two phases determine links to connect network nodes to concentrators and concentrators to each other and to computers. The capacitated concentrator location problem deals with the first phase of the overall design. Until now this problem was solved using a number of different heuristic procedures. The major problem in using these procedures is that users generally have no idea about the quality of resulting solutions. In this paper we propose efficient heuristic and optimal solution procedures which are capable of solving large problems. One of the heuristic procedures proposed in this paper has a clear advantage over previous methods. It not only provides solutions that are optimal or near optimal in the majority of cases but it also determines a lower bound on the optimal objective function value which can be used to judge the quality of the solution provided by the heuristic.
Abstract-Topoligical design of computer communication networks is a very difficult problem. This problem is generally disaggregated into a number of “simpler” problems. One of these “simpler” problems is the capacitated concentrator location problem. The paper makes use of the Lagrangian relaxation approach to develop optimal and heuristic solution procedures for this problem. Computational experiments show these procedures to be both efticient and effective. The heuristic solution procedure is compared to previously developed algorithms and found to generate significantly better results.
1. INTRODUCTION
Topological design of computer-communication networks is known to be a very difficult problem [ 1,2]. For this reason the design problem is generally disaggregated into several “simpler” problems which are solved in an iterative mode until a satisfactory design is reached [ 11. One of these “simpler” problems is the capacitated concentrator location problem. This problem is used to determine the number and location of concentrators and to allocate network nodes among these concentrators without violating capacities of concentrators.
Even though the capacitated concentrator location problem is simpler than the general topological design problem, it is still a difficult problem to solve. There has been relatively few studies addressing this problem. Neebe and Rao [3] formulate the problem as a set-partitioning problem and use linear programming relaxation of this formulation to develop a branch and bound code. They report computational results for moderate size problems. The remaining studies propose various heuristic solution procedures [4-73. Most of these procedures share the problem of not providing users with an indication of the solution quality [4,5,7]. A solution procedure recently developed by Klincewicz and Luss [6] overcomes this problem by calculating a lower bound as well deriving a feasible solution value using a Lagrangian relaxation of the original problem. The gap between these two values is used as a worst case estimate of the gap between the optimal solution value and the feasible solution value derived from the heuristic.
The literature contains a number of other papers on special cases or extensions of the basic concentrator location problem. Mirzaian [8] formulates a special case of the problem where every
*Hasan Pirkul received the B.S. degree in Industrial Engineering from Bosphorous University, Istanbul, Turkey in 1977, the M.S. degree in Management Science and Ph.D. degree in Computers and Information Systems from the Graduate School of Management, University of Rochester in 1980 and 1983, respectively.
Currentlv. he is an Assistant Professor of Management Information Systems at The Ohio State University. His research < interests aredistributed computer systems, databases, computer networks and applications of mathematical programming. He has published articles in several journals including IIE Transactions, IEEE Transactions on Computers, Mathemafical Programming, European Journal of Operational Research, Decision Sciences and Naval Research Logistic Quarterly.
CAOR 11:3-e 197
198 HASAN PIRKUL
node is assumed to place identical communication loads on the network. This assumption is later used in developing a heuristic solution procedure. The author presents bounds as well as feasible solution values for problems up to 50 nodes and 20 potential concentrator sites. Barcelo and Casanovas [9] study a problem where the maximum number of facility sites is predetermined. They use a Lagrangian relaxation of the problem to develop a four-stage heuristic solution procedure. McGregor and Shen [lo] and Schneider and Zastrow [ 1 l] propose heuristic solution procedures for the multilevel concentrator location problem, which is an extension of the basic concentrator location problem.
The capacitated concentrator location problem is closely related to the capacitated facility location problem [ 12-151. The major difference between these problems is that in the facility location problem user nodes can have more than one facility satisfying their demands, whereas in the concentrator location problem a network node must be assigned to a single concentrator. This difference results in the con~ntrator location problem being a pure O-l integer programming problem. On the other hand, the capacitated facility location problem is a mixed linear integer program with only a few of the variables (location variables) designated as integer. It should also be pointed out that the formulation of the capacitated concentrator location problem can be used to study other problems. Dutta et al. [16] show that in a distributed processing environment the problem of assigning partitioned tasks among processors can be formulated as the capacitated concentrator location problem.
In this paper we develop effective heuristic and optimal solution procedures for the capacitated concentrator location problem. Since it can be shown that this problem-is NP-Complete there is always the possibility that an optimal solution procedure may not terminate in a reasonable amount of computing time. Therefore, it is essential to have a good heuristic solution procedure as a backup to the optimal procedure. Furthermore, a good heuristic frequently leads to a significant reduction in computational effort needed to obtain an optimal solution. We believe that it is important to be able to judge the quality of solutions obtained from heuristic procedures. Therefore, like Klincewicz and Luss [6] we take a mathematical programming approach in developing an effective heuristic solution procedure. In doing so we use a new Lagrangian relaxation of the problem which results in significantly improved bounds and feasible solution values.
The mathematical formulation of the capacitated concentrator location problem is stated as:
Problem-P
C 1 CijXij + 1 C ~jaijXij + C Ujyj icl jeJ ief jcJ jsJ
subject to:
Xij - J'j < 0 QiEI, jcJ (3)
z aijxijd bj QjE J
where, I is the index set of network nodes, J is the index set of sites where we can locate a concentrator, aij is the amount of concentrator capacity that would be used if node i is assigned to a concentrator in location j, bj is the maximum capacity of concentrator at node j, cij is the cost of assigning node i to concentrator j, tj is the cost of purchasing a unit of concentrator capacity in site j,
Efficient algorithms for the capacitated concentrator location problem 199
and oj is the fixed set up cost of locating a concentrator in site j. The decision variables are defined as:
i
1 if node i is assigned to concentrator j,
‘G= 0 otherwise
if a concentrator is located in site j,
otherwise.
The first component of the objective function represents the communication costs, the second and third components capture the cost of establishing concentrator sites. The third component is a fixed set-up cost which is assumed to be independent of the concentrator size. The second component captures acquisition and operation costs that are directly related to the size of the concentrator. This formulation assumes that concentrator power can be purchased in units. This is an acceptable approximation since the model is generally used as one of several steps in a design process which is geared toward determining “good” but not necessarily optimal solutions [l]. Even though we present the resource consumption of each node as Uij (consumption is dependent on the concentrator that the node is assigned to), for this problem consumption is likely to be independent of the concentrator location. We have retained these terms so as to preserve the generality of the solution procedures developed in this paper. Constraint set (2) ensures that each node is assigned to a single concentrator. Constraint set (3) ensures that there is a concentrator at every site to which at least one node is assigned. Constraint set (4) represents capacities of concentrators. Finally constraint set (5) enforces the integrality conditions.
In Section 2, a Lagrangian relaxation of the capacitated concentrator location problem is presented. Section 3 outlines heuristic solution procedures. Results of computational experiments comparing these procedures to each other as well as to two other previously developed procedures are also reported in Section 3. The effectiveness of sensitivity analysis in problem reduction is investigated in Section 4. In Section 5, a branch and bound algorithm is presented and computational experience with this algorithm is reported.
2. A RELAXATION OF THE CAPACITATED CONCENTRATOR LOCATION PROBLEM
Development of an efficient solution method for problem-P requires a carefully designed branch and bound algorithm which exploits the special structure of the problem. An effective bounding rule is a very important part of such an algorithm. Furthermore, this bounding rule can also be used in developing heuristics and evaluating performance of the existing heuristics. We use the Lagrangian relaxation approach in deriving bounds for problem-P. The Lagrangian relaxation scheme has been successfully applied to many combinatorial optimization problems during the last decade. The use of generalized Lagrange multipliers was first suggested by Everett [ 171. The successful application of this relaxation to the travelling salesman problem by Held and Karp [ 181, led to its use in a variety of other problems. Various location problems [13,19,20]; distributed computer system design problems [21-231; communication network design problems [24] and multiple item inventory replenishment problem [25] are only a few of the problems to which this relaxation was applied. We study the following Lagrangian relaxation of problem-P formed by relaxing constraint set (2):
Problem-L
z ,$; cijxij + 1 C iel jeJ
;jaijxij + z ‘jYj +z li(z xij- ‘)]
subject to constraint sets (3), (4) and (5). Problem-L can be decomposed into the following subproblems:
Forj=l,...,IJI,
min i
1 Xij(Cij + ~jUij + li) + VjYj iel I
(7)
200 HASAN PIRKUL
subject to:
Xij-yj6 0 VieI (8)
z aijxij 6 bj
xijE (0, lj Vie I, .YjE {O, l}. (10)
In each subproblem yj is equal to either 0 or 1. If yj is equal to 0 then all xij are also equal to 0 due to constraint set (8). If yj is equal to 1 then the subproblem becomes a single constraint (rl knapsack problem which can be solved using any one of a number of very efficient solution procedures [26,27]. If the optimal solution to this knapsack problem has a negative objective function value with an absolute value greater than uj then yj is set equal to 1 and the solution of the knapsack problem is kept. Otherwise the solution of the subproblem is taken to be the zero vector. If we let Z,(1) be the value of the Lagrangian function with a multiplier vector 1, then the best bound using this relaxation is derived by calculating,
ZL@*) = max {ZL@)j. A
The challenging issue in deriving bounds using Lagrangian relaxation is the computation of a good set of multipliers. Excluding a few special cases, this is known to be a very difficult task [28]. In practice, a good but not necessarily optimal set of multipliers are located by using either a subgradient optimization method or various multiplier adjustment methods known as ascent (decent) methods [29].
In this study we employ the subgradient optimization algorithm to derive bounds using problem- L. The subgradient method is an adaptation of the gradient method in which subgradients replace gradients [30]. Given an initial multiplier vector 1 a sequence of multipliers are generated using the following rule:
lZk+ ’ = Ik + tk(AXk - b),
where Xk is an optimal solution to L(nk) (the Lagrangian problem with multiplier vector Ak) and t, is a positive scalar step size. It was shown by Poljak [31] that lim sup ZL(nk) converges to Z,@*) if t, + 0 and c z e ti + cc. Since in general these conditions are very difficult to satisfy, the method is always used as a heuristic. We use the following step size that has been frequently used in the past:
t, = dk(Z - .&(~k))/llAxk - bll',
where Z is a feasible solution value and d, is a scalar satisfying 0 < d, B 2. This scalar is set equal to 2 at the beginning of the algorithm and is halved whenever the bound does not improve in 15 consecutive iterations. The algorithm is terminated after 100 iterations unless an optimal solution is located before reaching that point. The computational effort required at each iteration of the subgradient optimization algorithm is equal to the effort needed to solve (JI O-l knapsack problems, each having II) variables.
In order to test the performance of the Lagrangian relaxation introduced in this section, a subgradient optimization algorithm is coded in FORTRAN IV and a set of computational experiments were carried out using an IBM 3081-D running under MVS/SP 1.3.2. Computing times reported throughout the paper are in CPU seconds of this computer. The problem data used in these experiments were randomly generated. Data points representing nodes and concentrator locations were drawn from a uniform distribution over a rectangle with sides 50 and 100. The Euclidean distance between node i and concentrator j (d,) was used to define cost coefficients cij as:
cij = d, * W2
Efficient algorithms for the capacitated concentrator location problem 201
where W2 is a positive constant. The fixed portion of the concentrator location costs were defined as:
Uj= Wl+ Wl *(R/4)
where Wl was a positive constant and R was a number drawn from a uniform distribution between 0 and 1. The remaining objective function coefficients Ej were drawn from a uniform distribution between 5 and 10. Resource consumptions at each branch were determined as:
aij = 50 * R
where R is defined as above. The upper bound on capacity of concentrators was set equal to 500 resulting in a limit of around 20 nodes per concentrator.
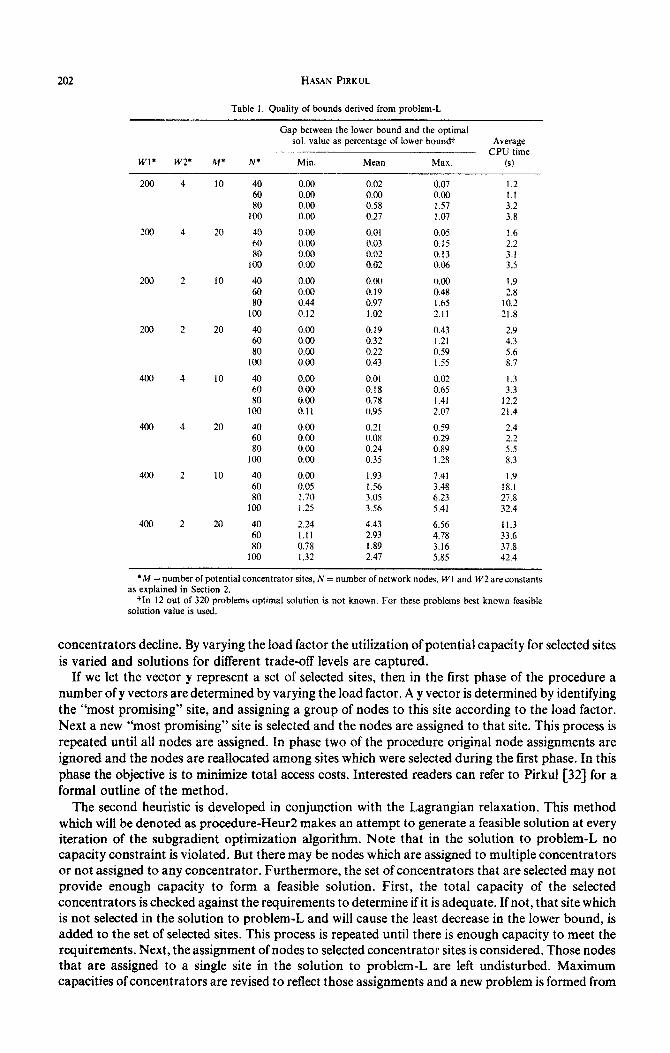
The results of these experiments are reported in Table 1. The gap between the lower bound and the
best known feasible solution is used to judge the quality of bounds generated by this method. This gap is expressed as a percentage of the lower bound. Every group reported in the table contains 10 problems and for each group the minimum, mean and maximum values are reported. The mean computing time for each group of problems is also reported. The problems generated by setting Wl = 400 and W2 = 2 represent cases where the fixed set up costs dominate access costs. These problems generally have solutions with only a minimum number of concentrators. It can be seen from Table 1 that average gap values range from 1 to 4% for these problems. For the other groups of problems the gaps are significantly smaller.
3. HEURISTIC SOLUTION METHODS
In this section two heuristics for solving problem-P are outlined. The first of these is a two-phase method. In the first phase, a set of concentrator sites is selected and in the second phase assignment of nodes to these sites is carried out. The second heuristic is used in combination with the Lagrangian relaxation. In this method an attempt is made to generate a feasible solution to problem-P in every iteration of the subgradient optimization algorithm.
The first heuristic which we will denote as procedure-Heurl is an adaptation of a procedure previously developed for a different problem [22]. This procedure makes use of the fact that decisions about the number of concentrators and their locations are strongly dependent on the trade-off between set up and access costs. Access costs are a combination of communication costs and other costs like capital outlays required to provide the incremental capacity requirement resulting from the assignment of the node i to site j. We represent access costs as:
Cij = Cij + Zjaij.
If set-up costs totally dominate access costs, only a minimum number of concentrator sites will be established. At the other extreme as set-up costs approach zero the problem becomes one of assigning each node to the concentrator which is least costly to access. Since the trade-off between the set up and access costs is not known before the problem is solved, a number of solutions each assuming a different trade-off level will be generated and the best one will be chosen. This is accomplished by controlling the number of sites that are selected to receive concentrators. When a site is chosen, all nodes for which it is the least costly one, will become candidates to be assigned to the concentrator in that site. If these candidates exceed the maximum capacity of the concentrator then those nodes with reasonable alternatives are deleted from the set ofcandidate nodes. If all candidate nodes are assigned and the concentrator has not reached the maximum capacity, then more nodes may be assigned to this site. This is mainly due to the fact that not all potential sites will be selected to receive a concentrator and that this site may indeed be the best one among the selected sites. In this case the concentrator is loaded up to a fraction of its maximum potential capacity. This fraction is denoted as the load factor (r). If the load factor is close to 1 then the procedure will pick only a minimum number of concentrators and utilize them close to their maximum capacities. On the other hand if the load factor is lowered then the number of concentrators picked by the procedure increases and sizes of
202 HASAN PIRKUL
Table 1. Quality of bounds derived from problem-L
Gap between the lower bound and the optimal sol. value as percentage of lower bound+ Average
__ CPU time WI* W2* M’ N* Min. Mean Max. (s)
200
200
200
200
400
400
400
400
IO
20
IO
20
10
20
10
20
40 60 80
100
40 60 80
100
40 60 80
100
40 60 80
100
40 60 80
100
40 60 80
100
40 60 80
100
40 60 80
100
11:: 0.00 0.00
0.00 0.00 0.W 0.00
0.00 0.00 0.44 0.12
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.11
0.00 0.00 0.00 0.00
0.00 0.05 1 .-lo 1.25 2.24 I.11 0.78 1.32
0.02 0.07 1.2 0.00 0.00 I.1 0.58 1.57 3.2 0.27 1.07 3.8
0.01 0.05 1.6 0.03 0.15 2.2 0.02 0.13 3.1 0.02 0.06 3.5
0.00 0.00 1.9 0.19 0.48 2.8 0.97 1.65 10.2 1.02 2.11 21.8
0.19 0.43 2.9 0.32 1.21 4.3 0.22 0.59 5.6 0.43 1.55 8.7
0.01 0.02 1.3 0.18 0.65 3.3 0.78 1.41 12.2 0.95 2.07 21.4
0.21 0.59 2.4 0.08 0.29 2.2 0.24 0.89 5.5 0.35 I .28 8.3
I .93 7.41 1.9 I .56 3.48 18.1 3.05 6.23 27.8 3.56 5.41 32.4
4.43 6.56 11.3 2.93 4.78 33.6 1.89 3.16 37.8 2.47 5.85 42.4
‘M = number of potential concentrator sites, N = number of network nodes. Wl and W2 are constants as explained in Section 2.
*In 12 out of 320 problems optimal solution is not known. For these problems best known feasible solution value is used.
concentrators decline. By varying the load factor the utilization of potential capacity for selected sites is varied and solutions for different trade-off levels are captured.
If we let the vector y represent a set of selected sites, then in the first phase of the procedure a number of y vectors are determined by varying the load factor. A y vector is determined by identifying the “most promising” site, and assigning a group of nodes to this site according to the load factor. Next a new “most promising” site is selected and the nodes are assigned to that site. This process is repeated until all nodes are assigned. In phase two of the procedure original node assignments are ignored and the nodes are reallocated among sites which were selected during the first phase. In this phase the objective is to minimize total access costs. Interested readers can refer to Pirkul [32] for a formal outline of the method.
The second heuristic is developed in conjunction with the Lagrangian relaxation. This method which will be denoted as procedure-Heur2 makes an attempt to generate a feasible solution at every iteration of the subgradient optimization algorithm. Note that in the solution to problem-L no capacity constraint is violated. But there may be nodes which are assigned to multiple concentrators or not assigned to any concentrator. Furthe~ore, the set of concentrators that are selected may not provide enough capacity to form a feasible solution. First, the total capacity of the selected concentrators is checked against the requirements to determine if it is adequate, If not, that site which is not selected in the solution to problem-L and will cause the least decrease in the lower bound, is added to the set of selected sites. This process is repeated until there is enough capacity to meet the requirements. Next, the assignment of nodes to selected concentrator sites is considered. Those nodes that are assigned to a single site in the solution to problem-L are left undisturbed. Maximum capacities of concentrators are revised to reflect those assignments and a new problem is formed from

Efficient algorithms for the capacitated concentrator location problem 203
those nodes that are not assigned to any site or are assigned to multiple sites. This new problem which is generally much smaller than the original one is solved using a procedure that attempts to minimize total access costs subject to concentrator capacities. The following is a brief formal outline of the method. Let,
I, = (set of nodes not yet assigned to a concentrator site)
J, = {concentrator sites that are selected in the solution to problem-Ll
then for a given i E I, one can define:
D,: is a measure of the extra access costs that need to be paid if node i is not assigned to the concentrator site that is least costly to access. The order in which nodes are assigned to concentrators is determined by dividing penalties into capacity consumption coefficients. A vector W is defined to have the following elements:
Wi= Dij:laij: ViE I,.
Elements of this vector are sorted in decreasing order and the nodes are assigned to the concentrator sites using this order. Whenever a node i can not be assigned to a site k due to capacity constraint, a new set ofj:,jz and D,: are determined for node i ignoring site k. Vector W corresponding to the free nodes is resorted and the assignment continues according to the new order until a feasible solution is determined.
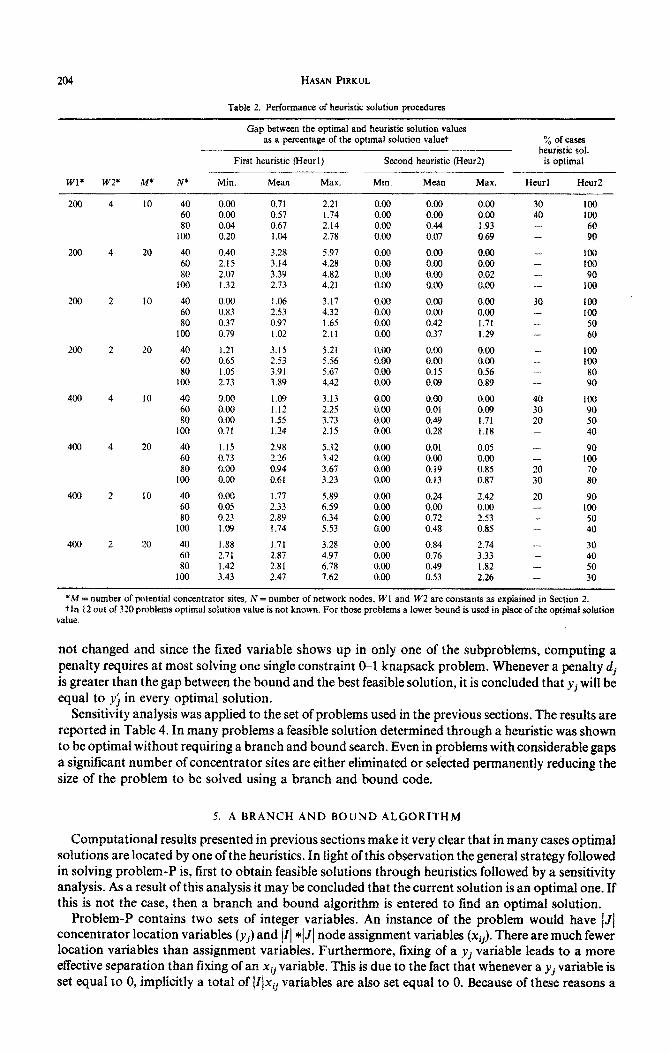
A set of computational experiments was performed to compare feasible solutions produced by the heuristics described in this section. The problems generated in the previous section were used in these experiments. The results are summarized in Table 2. The ratio of each heuristic solution value to the best lower bound is presented. As in Table 1 the minimum, mean and maximum ratios are reported for each group. Also reported is the percentage of problems for which an optimal solution was found by a heuristic. The results show that procedure-Heur2 generally outperforms procedure-Heurl. Also it is observed that in a significant number of cases an optimal solution is found by one of the heuristics.
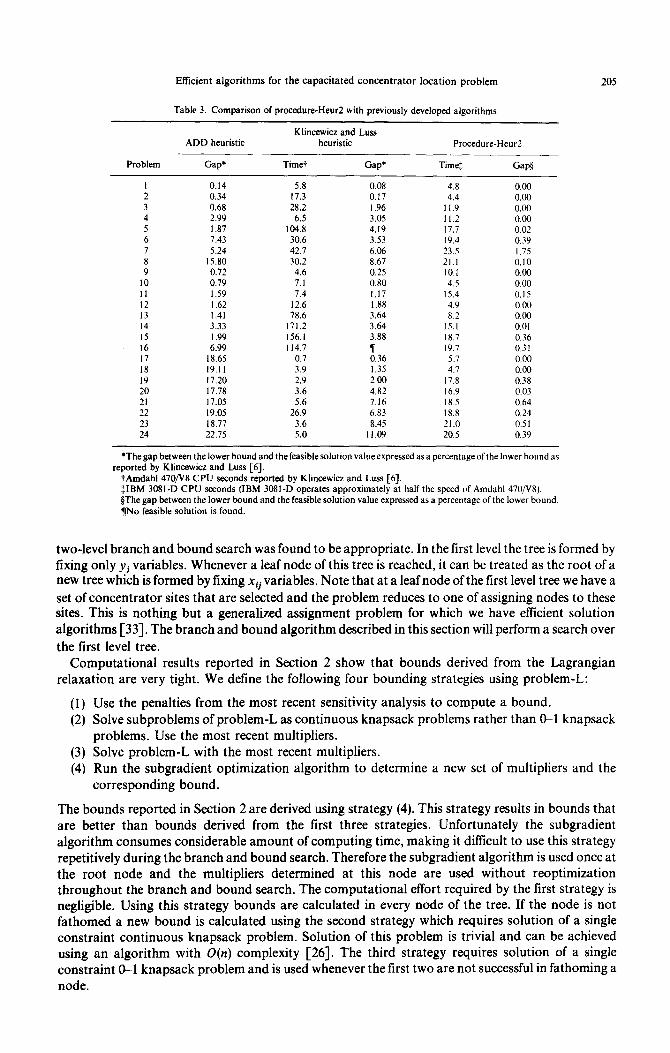
Procedure-Heur2 is further tested against a Lagrangian based heuristic solution procedure recently developed by Klincewicz and Luss and against an ADD heuristic [6]. In this comparison, 24 test problems originally defined by Kuehn and Hamburger [7] an d modified by Klincewicz and Luss [6] were used. The results of this comparison are reported in Table 3. As can be seen from this table, procedure-Heur2 results in gaps that are significantly smaller than the gaps reported by Klincewicz and Luss for their heuristic and for the ADD heuristic, The mean and maximum gaps were 0.22 and 1.75 % of lower bound with procedure-Heur2 as opposed to gaps reported at 3.69 and 11.09 % for Klincewicz and Luss heuristic and 8.47 and 22.75% for the ADD heuristic.
4. SENSITIVITY ANALYSIS AND PROBLEM REDUCTION
In the previous section it was shown that the heuristics generally produced very good solutions. It was also shown that the Lagrangian bound is very tight in most cases. Since the gap between the lower bound and best feasible solution is rather narrow, it is expected that sensitivity analysis will tix many of the variables before a branch bound search is started.
Note that fixing a yj variable is much more effective in reducing the problem size than fixing an Xij variable. This is due to the fact that whenever a concentrator site is eliminated, all corresponding node assignment variables (xii) are fixed to 0. If we let (x’, y’) be a solution to problem-L, then a set of penalties dj are defined by setting yj equal to 1 - y; and resolving problem-L. Since the multipliers are
204 HASAN PIRKUL
Table 2. Performance of heuristic solution procedures
200
200
200
200
400
400
400
400
I%f* N’
Gap between the optimal and heuristic solution values as a percentage of the optimal solution value+
First heuristic (Heurl ) Second heuristic (Heur2) -
Min. Mean Max. Min. Mean Max.
% ofcases heuristic sol.
is optimal
Heurl Hew2
10
20
10
20
10
20
10
20
40 0.00 0.71 2.21 60 0.00 0.57 1.74 80 0.04 0.67 2.14
loo 0.20 1.04 2.78
40 0.40 3.28 5.97 60 2.15 3.14 4.28 80 2.07 3.39 4.82
100 1.32 2.73 4.21
40 0.00 1.06 3.17 60 0.83 2.53 4.32 80 0.37 0.97 1.65
100 0.79 1.02 2.11
40 1.21 3.15 5.21 60 0.65 2.53 5.56 80 1.05 3.91 5.67
100 2.73 3.89 4.42
40 60 80
100
40 60 80
IOO
40 60 SO
100
40 60 80
100
0.00 1.09 3.13 0.00 1.12 2.25 0.00 I .55 3.73 0.71 1.24 2.15
1.15 2.98 5.32 0.73 2.26 3.42 0.00 0.94 3.67 0.00 0.61 3.23
0.00 1 .?I 5.89 0.05 2.33 6.59 0.23 2.89 6.34 1.09 I .74 5.53
1.88 1.71 3.28 2.71 2.87 4.97 I .42 2.81 6.78 3.43 2.47 1.62
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00
0.00 0.00 0.00 0.00
0.00 0.00 0.44 0.07
0.00 0.00 I .93 0.69
0.00 0.00 0.00 0.00
0.00 0.00 0.02 0.00
0.00 O,oO 0.00 0.00 0.42 1.71 0.37 1.29
0.00 0.00 0.15 0.09
0.50 0.01 0.49 0.28
0.01
0.00 100 0.00 100 0.56 80 0.89 90
0.00 0.09 1.7I I.18
0.05 0.00 0.85 0.87
0.19 0.13
0.24 2.42 0.00 0.00 0.72 2.53 0.48 0.85
0.84 0.76 0.49 0.53
2.74 3.33 1.82 2.26
40 30 20 -_
20 30
20
- -
- -
loll 100 60 90
100 100 90
100
100 100 50 60
100 90 50 40
90 100 70 80
90 IO0 50 40
30 40 50 30
*A4 = number of potential concentrator sites, N = number of network nodes, WI and K2 are constants as explained in Section 2. *In 12 out of 320 problems optimal solution value is not known. For those problems a lower bound is used in place of the optimal solution
value.
not changed and since the fixed variable shows up in only one of the subproblems, computing a penalty requires at most solving one single constraint %l knapsack problem. Whenever a penalty di is greater than the gap between the bound and the best feasible solution, it is concluded that Yj will be equal to y; in every optimal solution.
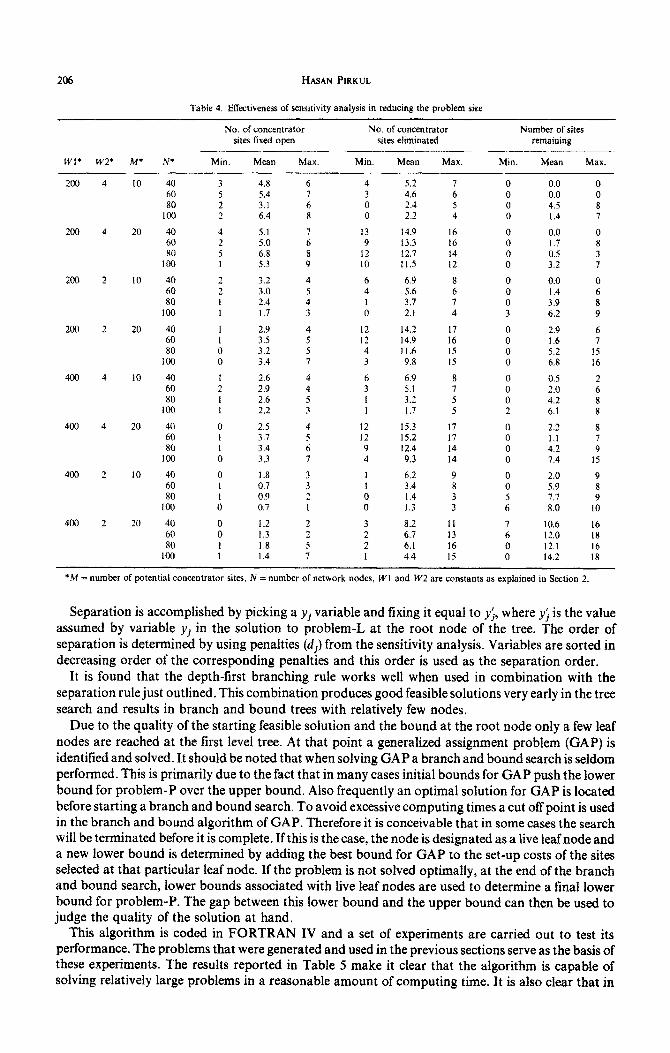
Sensitivity analysis was applied to the set of problems used in the previous sections. The results are reported in Table 4. In many problems a feasible solution determined through a heuristic was shown to be optimal without requiring a branch and bound search. Even in problems with considerablegaps a significant number of concentrator sites are either eliminated or selected permanently reducing the size of the problem to be solved using a branch and bound code.
5. A BRANCH AND BOUND ALGORITHM
Computational resuhs presented in previous sections make it very clear that in many cases optimal solutions are located by one of the heuristics. In light of this observation the general strategy followed in solving problem-P is, first to obtain feasible solutions through heuristics followed by a sensitivity analysis. As a result of this analysis it may be concluded that the current solution is an optimal one. If this is not the case, then a branch and bound algorithm is entered to find an optimal solution.
Problem-P contains two sets of integer variables. An instance of the problem would have IJI concentrator location variables (yj) and 111 *IJI no d e assignment variables (xii). There are much fewer location variables than assignment variables. Furthermore, fixing of a y, variable leads to a more effective separation than fixing of an Xij variable. This is due to the fact that whenever a yi variable is set equal to 0, implicitly a total of IfI Xlj variables are also set equal to 0. Because of these reasons a
Efficient algorithms for the capacitated concentrator location problem 205
Table 3. Comparison of procedure-Hem2 with previously developed algorithms
Problem
I 2 3 4 5 6 7 8 9
IO II 12 I3 I4 I5 16 I7 I8 19 20 21 22 23 24
ADD heuristic
Gap*
0.14 0.34 0.68 2.99 I .87 1.43 5.24
15.80 0.72 0.79 1.59 I .62 I.41 3.33 I .99 6.99
18.65 19.1 I 17.20 17.78 17.05 19.05 18.77 22.15
Klincewicz and Luss heuristic
Time+ Gap*
5.8 0.08 17.3 0.17 28.2 I .96 6.5 3.05
104.8 4.19 30.6 3.53 42.7 6.06 30.2 8.61 4.6 0.25 7.1 0.80 7.4 I.17
12.6 1.88 78.6 3.64
171.2 3.64 156.1 3.88 114.7 li
0.7 0.36 3.9 I .35 2.9 2.00 3.6 4.82 5.6 7.16
26.9 6.83 3.6 8.45 5.0 II.09
Procedure-Heur2
Time: Gad
4.8 0.00 4.4 0.00
11.9 0.00 I I.2 0.00 17.7 0.02 19.4 0.39 23.5 I .75 21.1 0.10 IO. I 0.00 4.5 0.00
15.4 0.15 4.9 0.00 8.2 0.00
15.1 0.01 18.7 0.36 19.7 0.3 I 5.7 0.00 4.7 0.00
17.8 0.38 16.9 0.03 18.5 0.64 18.8 0.24 21.0 0.5 I 20.5 0.39
*Thegap between the lower bound and the feasible solution valueexpressed as a percentage ofthe lower bound as reported by Klincewicz and Luss [6].
+Amdahl 47O/V8 CPU seconds reported by Klincewicz and Luss [6]. :IBM 3081-D CPU seconds (IBM 3081-D operates approximately at half the speed of Amdahl 47O/V8). $The gap between the lower bound and the feasible solution value expressed as a percentage of the lower bound. mo feasible solution is found.
two-level branch and bound search was found to be appropriate. In the first level the tree is formed by fixing only yj variables. Whenever a leaf node of this tree is reached, it can be treated as the root of a new tree which is formed by fixing xii variables. Note that at a leaf node of the first level tree we have a set of concentrator sites that are selected and the problem reduces to one of assigning nodes to these sites. This is nothing but a generalized assignment problem for which we have efficient solution algorithms [33]. The branch and bound algorithm described in this section will perform a search over the first level tree.
Computational results reported in Section 2 show that bounds derived from the Lagrangian relaxation are very tight. We define the following four bounding strategies using problem-L:
(1) (2)
(3) (4)
Use the penalties from the most recent sensitivity analysis to compute a bound. Solve subproblems of problem-L as continuous knapsack problems rather than &l knapsack problems. Use the most recent multipliers. Solve problem-L with the most recent multipliers. Run the subgradient optimization algorithm to determine a new set of multipliers and the corresponding bound.
The bounds reported in Section 2 are derived using strategy (4). This strategy results in bounds that are better than bounds derived from the first three strategies. Unfortunately the subgradient algorithm consumes considerable amount of computing time, making it difficult to use this strategy repetitively during the branch and bound search. Therefore the subgradient algorithm is used once at the root node and the multipliers determined at this node are used without reoptimization throughout the branch and bound search. The computational effort required by the first strategy is negligible. Using this strategy bounds are calculated in every node of the tree. If the node is not fathomed a new bound is calculated using the second strategy which requires solution of a single constraint continuous knapsack problem. Solution of this problem is trivial and can be achieved using an algorithm with O(n) complexity [26]. The third strategy requires solution of a single constraint O-1 knapsack problem and is used whenever the first two are not successful in fathoming a node.
206 HASAN PIRKUL
Table 4. Effectiveness of sensitivity analysis in reducing the problem size
No. of concentrator No. of concentrator Number of sites sites fixed open sites eliminated remaining
- -...- ~___~I__
WI* W2’ ‘w* N’ Min. Mean Max. Min. Mean Max. Min. Mean Max. -
200
200
200
200
400
400
400
400
IO 40 3
:: 5 2
100 2
20 40 4 60 2 80 5
100 1
IO 40 2 60 2 80 I
100 1
20 40 1 60 80 b
100 0
10 40 f 60 2 80 1
100 1 20 40 0
60 1 80 1
100 0
10 40 0 60 1 80
100 :,
20 40 0 60 0 80 1
100 1
4.8 5.4 3.1 6.4
5.1 5.0 6.8 5.3
3.2 3.0 2.4 1.7
2.9 3.5 3.2 3.4
2.6 2.9 2.6 2.2
2.5 3.7 3.4 3.3
1.8 0.7 0.9 0.7
1.2 1.3 1.8 1.4
6 4 I 3 6 0 8 0
7 13 6 9 8 12 9 10
4 6 5 4 4 1 3 0
4 12 5 12 5 4 7 3
4 6 4 3 5 I 3 1
4 12
: 12 9
I 4
3 1 3 1 2 0 1 0
2 3 2 2 5 2 7 1
5.2 4.6 2.4 2.2
14.9 13.3 12.7 11.5
6.9 5.6 3.1 2.1
14.2 14.9 11.6 9.8
6.9 5.1 3.2 1.7
15.3 15.2 12.4 9.3
6.2 3.4 1.4 1.3
8.2 6.7 6.1 4.4
7 0 6 0 5 0 4 0
16 0 16 0 14 0 12 0
8 0 6 0 7 0 4 3
17 0 lb 0 15 0 15 0
8 0 7 0 5 0 5 2
17 0 17 0 14 0 14 0
9 0 8 0 3 5 3 6
I1 7 13 6 16 0 15 0
0.0 0 0.0 0 4.5 8 1.4 7
0.0 0 I .7 a 0.5 3 3.2 7
0.0 0 1.4 6 3.9 8 6.2 9
2.9 6 I .6 7 5.2 15 6.8 16
0.5 2 2.0 6 4.2 a 6.1 8
2.2 1.1 4.2 1.4
8
; 15
2.0 9 5.9 a 7.7 9 8.0 10
10.6 16 12.0 18 12.1 16 14.2 18
*M = number of potential concentrator sites, N = number of network nodes, Wl and W2 are constants as explained in Section 2.
Separation is accomplished by picking a yj variable and fixing it equal to y(i, where y(i is the value assumed by variable yj in the solution to problem-L at the root node of the tree. The order of separation is determined by using penalties (dj) from the sensitivity analysis. Variables are sorted in decreasing order of the corresponding penalties and this order is used as the separation order.
It is found that the depth-first branching rule works well when used in combination with the separation rule just outlined. This combination produces good feasible solutions very early in the tree search and results in branch and bound trees with relatively few nodes.
Due to the quality of the starting feasible solution and the bound at the root node only a few leaf nodes are reached at the first level tree. At that point a generalized assignment problem (GAP) is identified and solved. It should be noted that when solving GAP a branch and bound search is seldom performed. This is primarily due to the fact that in many cases initial bounds for GAP push the lower bound for problem-P over the upper bound. Also frequently an optimal solution for GAP is located before starting a branch and bound search. To avoid excessive computing times a cut off point is used in the branch and bound algorithm of GAP. Therefore it is conceivable that in some cases the search will be terminated before it is complete. If this is the case, the node is designated as a live leaf node and a new lower bound is determined by adding the best bound for GAP to the set-up costs of the sites selected at that particular leaf node. If the problem is not solved optimally, at the end of the branch and bound search, lower bounds associated with live leaf nodes are used to determine a final lower bound for problem-P. The gap between this lower bound and the upper bound can then be used to judge the quality of the solution at hand.
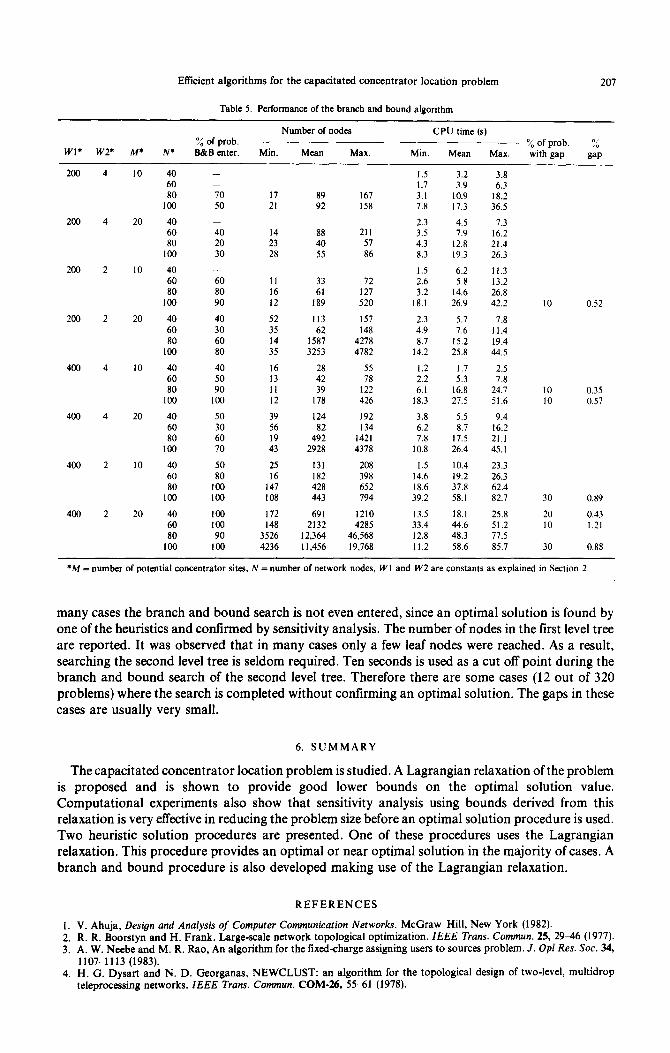
This algorithm is coded in FORTRAN IV and a set of experiments are carried out to test its performance. The problems that were generated and used in the previous sections serve as the basis of these experiments. The results reported in Table 5 make it clear that the algorithm is capable of solving relatively large problems in a reasonable amount of computing time. It is also clear that in
Efficient algorithms for the capacitated concentrator location problem 207
Table 5. Performance of the branch and bound algorithm
Number of nodes CPU time (s) :< of prob. % of prob. ::
WI* W2* M* N’ B&B enter. Min. Mean Max. Min. Mean Max. with gap gap
200
200
200
2Oil
400
400
400
400
10
20
10
20
10
20
10
20
40 60 80
100
- _ 70 50
17 89 167 21 92 158
1.5 3.2 3.8 1.7 3.9 6.3 3.1 10.9 18.2 7.8 17.3 36.5
40 -
60 40 80 20
100 30
14 88 211 23 40 57 28 55 86
2.3 4.5 7.3 3.5 7.9 16.2 4.3 12.8 21.4 8.3 19.3 26.3
40 -
60 60 80 80
100 90
11 33 72 16 61 127 12 189 520
1.5 6.2 11.3 2.6 5.8 13.2 3.2 14.6 26.8
18.1 26.9 42.2
40 40 52 I13 157 2.3 5.7 7.8 60 30 35 62 148 4.9 7.6 Il.4 80 60 14 1587 4278 8.7 15.2 19.4
100 80 35 3253 4782 14.2 25.8 44.5
40 40 16 28 55 1.2 1.7 2.5 60 50 13 42 78 2.2 5.3 7.8 80 90 11 39 122 6.1 16.8 24.7
100 IOU 12 178 426 18.3 27.5 51.6
40 50 39 124 192 3.8 5.5 9.4 60 30 56 82 134 6.2 8.7 16.2 80 60 19 492 1421 7.8 17.5 21.1
100 70 43 2928 4378 10.8 26.4 45.1
40 50 25 131 208 1.5 10.4 23.3 60 80 16 182 398 14.6 19.2 26.3 80 100 147 428 652 18.6 37.8 62.4
100 100 108 443 794 39.2 58.1 82.7
40 100 172 691 1210 13.5 18.1 25.8 60 100 148 2132 4285 33.4 44.6 51.2 80 90 3526 12,364 46,568 12.8 48.3 77.5
100 100 4236 11,456 19,768 11.2 58.6 85.7
10
10 10
30
20 10
30
0.52
0.35 0.57
0.89
0.43 1.21
0.88
*MC number of potential concentrator N = number Of network Wl and W2 are constants as explained in Section
many cases the branch and bound search is not even entered, since an optimal solution is found by one of the heuristics and confirmed by sensitivity analysis. The number of nodes in the first level tree are reported. It was observed that in many cases only a few leaf nodes were reached. As a result, searching the second level tree is seldom required. Ten seconds is used as a cut off point during the branch and bound search of the second level tree. Therefore there are some cases (12 out of 320 problems) where the search is completed without confirming an optimal solution. The gaps in these cases are usually very small.
6. SUMMARY
The capacitated concentrator location problem is studied. A Lagrangian relaxation of the problem is proposed and is shown to provide good lower bounds on the optimal solution value. Computational experiments also show that sensitivity analysis using bounds derived from this relaxation is very effective in reducing the problem size before an optimal solution procedure is used. Two heuristic solution procedures are presented. One of these procedures uses the Lagrangian relaxation. This procedure provides an optimal or near optimal solution in the majority of cases. A branch and bound procedure is also developed making use of the Lagrangian relaxation.
REFERENCES
1. V. Ahuja, Design and Analysis of Computer Communication Networks. McGraw-Hill, New York (1982). 2. R. R. Boorstyn and H. Frank. Large-scale network topological optimization. IEEE Trans. Commun. 25, 2946 (1977). 3. A. W. Neebe and M. R. Rao, An algorithm for the fixed-charge assigning users to sources problem. J. Opl Res. Sot. 34,
1107-1113 (1983). 4. H. G. Dysart and N. D. Georganas, NEWCLUST: an algorithm for the topological design of two-level, multidrop
teleprocessing networks. IEEE Trans. Commun. COM-26, 55-61 (1978).
208 HASAN PIRKUL
5.
6.
7. 8.
9.
10.
11.
12.
13.
14.
15. 16.
17.
18. 19. 20. 21. 22.
23.
24.
25.
26. 27. 28.
29.
30. 31. 32.
33.
E. Feldman, F. A. Lehrer and T. L. Ray, Warehouse location undercontinuouseconomies ofscale. Mgmt Sci. 12,670-684 (1966). J. G. Klincewicz and H. Luss, A Lagrangian relaxation heuristic for capacitated facihty location with single-source constraints. J. Opi Res. Sot. 37, 495-500 (1986). A. A. Kuehn and M. J. Hamburger, A heuristic program for locating warehouses. Mgmt Sci. 9,643-666 (1963). A. Mirzaian, Lagrangian relaxation for the star-star concentrator location problem: approximation algorithm and bounds. Networks 15, l-20 (1985). J. Barcelo and J. Casanovas, A heuristic Langrangian algorithm for the capacitated plant location problem. Eur. J. Opi Res. 15, 212-226 (1984). P. McGregor and D. Shen, Network design: an algorithm for access facility location problem. IEEE Trans. Commun. COM-25,61-73 (1977). G. M. Schneider and M. N. Zastrow, An algorithm for the design ofmultilevel concentrator networks. Comput. Networks 6, l-11 (1982). U. Akinc and B. M. Khumawala, An eficient branch and bound algorithm for the capacitated warehouse location problem. Mgmt Sci. 23, 585-594 (1977). A. M. Geoffrion and R. McBride, Lagrangian relaxation applied to ~pa~itat~faciiity location problems. AllE Trans. 10, 40-47 (1978). M. Guignard and K. Spielberg, A direct dual method for the mixed plant location problem. Mar/z. Progr. 17, 198-228 (1979). R. M. Nauss, An improved algorithm for capacitated faciiity location problem. J. Opl Res. Sot. 29, 1195-1202 (1978). A. Dutta, G. Koehler and A. Whinston, On optimal allocation in a distributed processing environment. Mgmt Sci. 28, 839-853 (1982). H. Everett, Generalized Lagrange multipliers method for solving problems of optimum allocation of resources. Opns Res. 11, 399-417 (1963). - - -
-_
M. Held and R. M. Karp, The travelling salesman problem and minimum spanning trees. Opns Res. 18,1138-l 162 (1970). D. Erlenkotter, A dual based procedure for uncapacitated facility location. Opns Res. 2$,992-1009 (1978). M. L. Fisher and D. S. Hochbaum, Database location in computer networks. J. Ass. Comput. Mach. 27,718-735 (1980). B. Gavish, Models for configuring iarge scale distributed computing systems. AT&T Tech. f. 64, 491-532 (1985). B. Gavish and H. Pirkul, Ahocation of databases and processors in a distributed computing system. Munagement of Distributed Data Processing (Edited by J. Akoka), pp. 215-231. North-Holland, Amsterdam (1982). H. Pirkul, An integer programming model for the allocation of databases in a distributed computer system. Eur. J. Opl Res. 26, 3 (1986). B. Gavish, Topological design of centralized computer networks-formulations and algorithms. Networks 12, 355-377 (1982). H. Pirkul and 0. Aras, Capacitated multiple item ordering problem with quantity discounts. IIE Trans. 17, 207-211 (1985). E. Balas and E. Zemel, An algorithm for large zero-one knapsack problems. Opns Res. 28, 1130-l 154 (1980). R. M. Nauss, An efhcient algorithm for the O-1 knapsack problem. Mgmr Sci. 23, 27-31 (1976). B. Gavish, On obtaining the “best” multipliers for a Lagrangian relaxation for integer programming. Comput. Opns Res. 5, 55-71 (1978). M. S. Bazaara and J. J. Goode, A survey of various tactics for generating Lagrangian multipliers in the context of Lagrangian duality. Eur. J. Opi Res. 3, 322-338 (1979). M. Held, P. Wolfe and H. P. Crowder, Validation of subgradient optimization. Math. Progr. 6, 62-88 (1974). B. T. Poijak, Minimization of unsmooth functionals. U.S.S.R. Compur. Math. Mathf Phys. 9, 509-521 (1969). H. Pirkul, Eflicient algorithms for the capacitated concentrator location problem. Working Paper Series, WPS 85-86, College of Business, The Ohio State University (1985). G. T. Ross and R. M. Soland, A branch and bound algorithm for the generalized assignment problem. Math. Progr. 8,91- 103 (1975).





























