-
ELASTICITY, RUBBER-LIKE
Introduction
Elasticity is the reversible stress–strain behavior by which a
body resists andrecovers from deformation produced by a force (1).
This behavior is exhibited byrubber-like materials in a unique and
extremely important manner. Unlike metalsor glasses, they can
undergo very large deformations without rupture (and are
thussimilar to liquids) and then can come back to their original
shape (as do solids).This exceptional ability was investigated in
1805 (2,3), well before the concept ofpolymers as long-chain
molecules was established in the 1920s. It was observedthat a
rubber gave off heat upon stretching and, when submitted to a
constantload, became shorter as temperature was increased. Later,
Kelvin (4) derived thethermodynamic laws of elasticity, and more
careful experiments were performedby Joule (5). Many books and
review papers have been published on the subject(6–36).
Deformation and Mechanical Testing
When a body is submitted to external stress or pressure, it
undergoes a changein shape or volume. Mechanical testing of rubber
involves application of a forceto a specimen and measurement of the
resultant deformation or application of adeformation and
measurement of the required force. The results are expressed
interms of stress and strain and thus are independent of specimen
geometry. Stressis the force f per unit original cross-sectional
area A, and strain the deformationper unit original dimension. The
units of stress are Newtons per square meter(N/m2 or Pa); strain is
dimensionless. The ratio of stress to strain is called the
216Encyclopedia of Polymer Science and Technology. Copyright
John Wiley & Sons, Inc. All rights reserved.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 217
A
L
f
f
L0
(a) (b)
Fig. 1. Uniaxial extension of a bar-shaped sample. (a) No load;
(b) tensile load. A = area;f = force; L0 = original length; L =
length.
modulus. A material is Hookean when its modulus is independent
of strain (typicalof a metal spring or wire); elastomers are
Hookean only in the range of very smalldeformations.
The simplest deformations are isotropic compression under
hydrostatic pres-sure, uniaxial extension (or compression), and
simple shear. They are used todetermine the bulk modulus K, Young’s
modulus E, and shear modulus G, respec-tively (37–44). Elastomer
testing for commercial applications is highly dependenton the
method, the conditions (eg, strain rate, temperature), and the
shape of thesamples. Therefore, mechanical tests have been
standardized for uniformity andsimplicity by the American Society
for Testing and Materials (ASTM) (45).
Isotropic Compression. The volume of a sample decreases from V0
to Vwhen submitted to a hydrostatic pressure p. The bulk modulus is
the ratio of thispressure to the volume change per unit volume
�V/V0:
K = p/(�V/V0) (1)
where �V = V0 − V; K is the reciprocal of the compressibility
and can be deter-mined by direct measurement of compressibility
(46) or velocity of longitudinalelastic waves (sound) or by
theoretical calculations (39).
Uniaxial Extension. A rubber strip of original length L0 is
stretched uni-axially to a length L, as illustrated in Figure 1.
The stretch and elongation are�L= L− L0 and λ = L/L0, respectively.
The strain � (also known as the relativedeformation, linear
dilation, or extension) and the elongation or extension ratio λare
related by
� = �L/L0 = λ − 1 (2)
-
218 ELASTICITY, RUBBER-LIKE Vol. 2
The lengthwise extension is in general accompanied by a
transverse contraction.The ratio of the change �w in width per unit
width w0 to the change in length perunit length is called Poisson’s
ratio (47):
νp = (�w/w0)/(�L/L0) (3)
Ideal rubbers and liquids deform at constant volume, for which
νp is equal to 0.5.Poisson’s ratio for real elastomers may be
experimentally determined by applyingextensometers in the
transverse and axial directions of a sample. Approximatevalues of
νp thus determined are 0.33 for glassy polymers, 0.4 for
semicrystallinepolymers, and 0.49 for elastomers. Young’s modulus E
is the ratio of normal stressf /A to corresponding strain �:
E= ( f/A)/� (4)
Generally, stress–strain curves deviate markedly from a straight
line, as illus-trated in Figure 2. The Young’s modulus at small
deformation is the slope tan θ ofthe stress–strain curve at the
origin (initial tangent modulus). It can be measuredin flexure or
by tensile experiments (48).
Tension testing of a vulcanized elastomer also permits the
determinationof the tensile strength, which is the maximum stress
applied during stretchinga specimen to rupture; the corresponding
rupture strain is called the maximumextensibility (49–52). Typical
values are given in Table 1 (14). Dumbbell and ringspecimens can be
used.
6
6
5
5
4
4
3
3
2
f/A, N
/mm
2
2
1
10
7 8�
�
Fig. 2. Stress–strain curve of a non-Hookean solid; typical
curve for an elastomer inuniaxial extension.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 219
Table 1. Properties of a Typical Rubber, Metal, and Glassa
Property Rubber Metal Glass
Breaking extension, % 500 Large, plastic 3Elastic limit, % 500 2
3Tensile strength, MN/m2b 10c 5 × 104 5 × 103aRef. 14.bTo convert
MN/m2 (MPa) to psi, multiply by 145.c>103 if based on area at
break.
Forcegauge
Recorder
CathetometerConstant T
N2
Fig. 3. Schematic diagram of a typical apparatus used to measure
elastomer stress as afunction of strain (21). T = Temperature.
A typical apparatus used to measure the equilibrium stress of an
elongatednetwork as a function of strain and temperature is shown
in Figure 3 (21). Therubber strip is held between two clamps and
maintained under a protective atmo-sphere of nitrogen. The sample
length, required to characterize its deformation,is obtained by
means of a cathetometer or traveling microscope (the central
testsection of the sample is delineated by ink marks applied before
loading). Valuesof the force are obtained from a calibrated stress
gauge, the output of which isdisplayed as a function of time on a
standard recorder. Measurements are madeat elastic equilibrium; the
influence of temperature can also be studied. Anotherexample of a
stretching device is an automatic stress relaxometer (53).
Simple Shear. Simple shear, illustrated in Figure 4, is a
deformation inwhich the height H and surface A of the sample are
held constant. The shear
-
220 ELASTICITY, RUBBER-LIKE Vol. 2
A
H
y
xf
�
U
y
A
H
f
x(a) (b)
Fig. 4. Simple shear of a rectangular sample. (a) No
deformation; (b) simple shear.A = area; H = height; f = force; U =
linear displacement.
modulus or rigidity G is expressed by the relations
G = ( f/A)/(U/H) = ( f/A)tan γ � f/γ A (5)
where γ is the shear strain and f/A the shear stress. As in the
case of Young’smodulus, the shear modulus (41,42) is a material
constant if stress and strain aredirectly proportional. If they are
not, the shear modulus at small deformation isemployed; it is
defined as the slope at the origin of the stress–strain curve.
Theshear modulus is generally measured on a cylindrical specimen
and a tension-testing machine.
Typical values of moduli and Poisson’s ratios for metals,
ceramics, and poly-mers are given in Table 2 (39). Moduli of
rubbers are strikingly low, and eventhose of other types of
polymers are of the order of one tenth of those of metals.However,
compared at equal weights, ie, ratio of modulus to density ρ,
polymers(except rubbers) compare favorably.
Relationships between Moduli and Poisson’s Ratio. On the basis
ofthe theory of elasticity of isotropic solids, the moduli and
Poisson’s ratio are inter-related (54) as follows:
E= 2G(1 + νp) = 3K(1 − 2νp) (6)
For elastomers, the Poisson’s ratio is nearly 0.5, and thus E �
3G.
Conditions for Rubber-like Elasticity
Long, Highly Flexible Chains. Elastomers consist of polymeric
chainswhich are able to alter their arrangements and extensions in
space in response toan imposed stress. Only long polymeric
molecules have the required exceedinglylarge number of available
configurations.
It is necessary that all the configurations are accessible; this
means thatrotation must be relatively free about a significant
number of the bonds joiningneighboring skeletal atoms.
-
Table 2. Poisson’s Ratio, Moduli, and Density of Metals,
Ceramics, and Polymersa
Specific properties
Young’s modulus E, Shear modulus G, Bulk modulus K, Density ρ,
E/ρ, 106 G/ρ, 106 K/ρ, 106
Material νp 109 N/m2b 109 N/m2b 109 N/m2b g/cm3 m2/s2 m2/s2
m2/s2
MetalsCast iron 0.27 90 35 66 7.5 12.0 4.7 8.8Steel (mild) 0.28
220 86 166 7.8 28.0 11.0 21.0Aluminum 0.33 70 26 70 2.7 26.0 9.6
26.0Copper 0.35 120 44.5 134 8.9 13.5 4.5 15.0Lead 0.43 15 5.3 36
11.0 13.6 4.8 33.0Mercury 0.5 0 0 25 13.55 0.0 0.0 1.85
InorganicsQuartz 0.07 100 47 39 2.65 38.0 17.8 14.7Vitreous
silica 0.14 70 30.5 32.5 2.20 32.0 14.0 14.7Glass 0.23 60 24.5 37
2.5 24.0 9.8 14.9Granite 0.30 30 11.5 25 2.7 11.1 4.3 9.2
WhiskersAlumina 2000 1000 667 3.96 510 253 225Carborundum 1000
500 333 3.15 315 160 106Graphite 1000 500 333 2.25 440 220 150
PolymersPolystyrene 0.33 3.2 1.2 3.0 1.05 3.05 1.15
2.85Poly(methyl Methacrylate) 0.33 4.15 1.55 4.1 1.17 3.55 1.33
3.5Nylon-6,6 0.33 2.35 0.85 3.3 1.08 2.21 0.79 2.3Polyethylene (low
density) 0.45 1.0 0.35 3.33 0.91 1.1 0.385 3.7Ebonite 0.39 2.7 0.97
4.1 1.15 2.35 0.86 3.6Rubber 0.49 0.002 0.0007 0.033 0.91 0.002
0.00075 0.04
LiquidsWater 0.5 0.0 0.0 2.0 1.0 0.0 0.0 2.0Organic liquids 0.5
0.0 0.0 1.33 0.9 0.0 0.0 1.5
aRef. 39. Courtesy of Elsevier.bN/m2 = Pa. To convert Pa to psi,
multiply by 0.000145.
221
-
222 ELASTICITY, RUBBER-LIKE Vol. 2
Fig. 5. Segment of an elastomeric network.
Network Structure. Chains must be joined by permanent bonds
calledcross-links, as illustrated in Figure 5. The network
structure thus obtained isessential so as to avoid chains
permanently slipping by one another, which wouldresult in flow and
thus irreversibility, ie, loss of recovery. These cross-links maybe
chemical bonds or physical aggregates, eg, glassy domains in
multiphase blockcopolymers (55,56).
At the end of the cross-linking process, the topology of the
mesh is composedof the different entities represented in Figure 6
(16,57–59). An elastically activejunction is one joined by at least
three paths to the gel network (60,61). An ac-tive chain is one
terminated by an active junction at both its ends.
Rubber-likeelasticity is due to elastically active chains and
junctions. Specifically, upon de-formation the number of
configurations available to a chain decreases and theresulting
decrease in entropy gives rise to the retractive force.
Weak Interchain Interactions. Apart from the effects of the
cross-links,the molecules must be free to move reversibly past one
another, that is, the in-termolecular attractions known as
secondary or van der Waals forces, which existbetween all
molecules, must be small. Specifically, extensive crystallization
shouldnot be present, and the polymer should not be in the glassy
state.
Differences between Elastomers and Metals
Elastomers and metals differ greatly with regard to deformation
mechanisms (26,62,63). Metals and minerals are formed of atoms
arranged in a three-dimensionalcrystalline lattice, joined by
powerful valence forces operating at relatively short
-
Vol. 2 ELASTICITY, RUBBER-LIKE 223
(a) (b)
(d)(c)
Fig. 6. Structural features of a network. (a) Elastically active
chain; (b) loop; (c) trappedentanglement; (d) chain end.
range. Deformation of such materials involves changes in the
interatomic distance,which requires large forces; hence the elastic
modulus of these materials is veryhigh. After a small deformation,
slippage between adjacent crystals occurs at theyield point, and
the deformation increases much more rapidly than the stress
andbecomes irreversible or plastic. The primary effect of
stretching a metal short ofthis yield point is the increase �Em in
energy caused by changing the distanced of separation between metal
atoms. The sample recovers its original lengthwhen the force is
removed, since this process corresponds to a decrease in
energy.Heating increases oscillations about the minimum of the
asymmetric potentialenergy curve and thus causes the usual volume
expansion.
Stretching of elastomers does not involve any significant
changes in the in-teratomic distances, and therefore the forces
required are considerably lower. Thenumber of available
configurations for a network chain is reduced in the defor-mation
process. After suppression of the stress, the specimen recovers its
originalshape, since this corresponds to the most disordered state.
Thus the retractiveforce arises primarily from the tendency of the
system to increase its entropytoward the maximum value it had in
the undeformed state. At high elongations,stress–strain curves turn
upward, a behavior very unlike that of metals. The num-ber of
available configurations is drastically reduced in this region, and
chainsreach the limits of their extensibility. For polymers with
regular structures, crys-tallization may also be induced. Further
elongation may then require deformationof bond angles and length,
which requires much larger forces.
At constant force, heating increases disorder, forcing the
sample in the direc-tion of the state of disorder it had at a lower
temperature and smaller deformation.The result is therefore a
decrease in length.
-
224 ELASTICITY, RUBBER-LIKE Vol. 2
Extension of Elastomers and Compression of Gases
The extension of elastomers and the compression of gases are
associated with adecrease in entropy. Thus, similar behavior is
expected in regard to (adiabatic)deformation and heating. The work
of deformation of a gas is dW = −pdV, wherep is the pressure and V
the volume. For an elastomer it is dW = fdL, where f is theforce
and L the length; the term −pdV is not taken into account, since
there is onlya negligible change in rubber volume during
stretching. These observations can beused to explain Gough’s
experiments by making use of classical thermodynamicprinciples
(64).
Statistical Distribution of End-To-End Dimensions of a Polymer
Chain
Before treating the statistical properties of a network, the
statistics of a singlechain must be considered, mainly to establish
the relationship between the num-ber of configurations and the
deformation (12,16,65–72). A polymeric chain isconstantly changing
its configuration by Brownian motion. Statistical methodsand
idealized models permit calculation of the average properties of
such a chain.
The Freely Jointed Chain. This type of idealized chain
consisting of nlinks of length l is represented in Figure 7, where
r is the end-to-end distance.When the chain is completely extended,
R = nl. The chain may assume manyconfigurations, each associated
with an end-to-end distance ri. In statistics, it isequivalent to
consider a molecule at different times or an assembly of N
moleculesat the same time. An average quantity describing the
assembly is the mean-squareend-to-end distance r2 defined by
r2 = 1N
N∑i = 1
r2i (7)
where ri is the end-to-end distance of the ith chain. The vector
ri is the sum of thelink vectors Ij:
ri =n∑
j = 1Ij (8)
Ij
r
Fig. 7. Ideal chain formed with n links of length l. r =
End-to-end distance, Ij = linkvector.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 225
and r2i is the scalar product of ri with itself:
r2i =n∑
j = 1I2j + 2
∑k< j
Ik·Ij (9)
If the chain is assumed to be freely jointed and volumeless, any
two linkscan assume any orientation with respect to each other.
Therefore the second termof equation (9) is zero and
r2i = nl2 (10)
The mean-square end-to-end distance of a freely orienting chain
is deducedfrom equations (7) and (10) (73–76) as follows:
r2 = nl2 (11)
Another interesting quantity is the probability that a chain has
a given end-to-end distance (77–81). This is called the Gaussian
distribution function
W(x,y,z)dxdydz= W(x)dxW(y)dyW(z)dz= (b/π1/2)3exp( − b2r2)dxdydz
(12)
where r2 = x2 + y2 + z2, and b2 = 3/2r2. This generalization is
valid only for smallextensions of a relatively long chain (82).
Equation (12) gives the probability thatif one extremity of the
vector r is fixed at the origin of the coordinates, the other
liesin the volume dx dy dz centered around the point (x, y, z).
What is more interestingis the probability for a chain to have its
end in a spherical shell of radius r andthickness dr centered at
the origin, irrespective of direction. This is the
radialdistribution
W(r)dr = (b/π1/2)3exp( − b2r2)4πr2dr (13)
which is illustrated in Figure 8 (3). The maximum occurs at r =
(2nl2/3) 12 . Themean-square end-to-end distance is the second
moment of the radial distributionfunction
r2 =∫ ∞
0r2W(r)dr/
∫ ∞0
W(r)dr (14)
which yields the result of equation (11)
r2 = 3/2b2 = nl2 (15)
The Gaussian distribution (eq. (12)) was obtained in the
aforementionedtreatment with the assumption that chains are far
from their full extension. More-over, the Gaussian distribution
function predicts zero probability only for r = ∞instead of for all
r in excess of that for full chain extension, and does not
adequately
-
226 ELASTICITY, RUBBER-LIKE Vol. 2
0.04
0.03
0.02
0.01
00 10 20 30 40 50
r, nm
W(r
), n
m− 1
Fig. 8. Radial distribution function W(r) of the chain
displacement vectors for chainmolecules consisting of 104 freely
jointed segments, each of length l = 0.25 nm; W(r) isexpressed in
nm− 1 and r in nm (3). Courtesy of Cornell University Press.
take into account the significant geometric and conformational
differences knownto exist among different types of polymer chains
(83). The distribution obtainedfrom a more general treatment is of
the more complicated form (84–86) shown asfollows:
W(r)dr = const.×exp(
−∫ r
0L− 1(r/nl)dr/l
)4πr2dr (16)
where L− 1 is the inverse Langevin function and
L(u) = coth u− 1/u (17)
Equation (16) can be expanded in the series
W(r)dr = const.×exp{−n[(3/2)(r/nl)2 + (9/20)(r/nl)4 +
(99/350)(r/nl)6 + · · ·]}4πr2dr(18)
and the Gaussian distribution (eq. (13)) recovered for r � nl. A
comparison of theGaussian and inverse Langevin distributions for n
= 6 is shown in Figure 9 (7).
Chain with Bond-Angle Restrictions. Although the chain in the
afore-mentioned treatment was assumed to be freely jointed, a real
polymer chain hasfixed bond angles θ . Therefore, the second term
in equation (9) is no longer zero.The scalar product of two vectors
Ii·Ij is l2 cos|j − i|θ . It can be shown (9,73,74) that
r2 � nl2(1 − cos θ )/(1 + cos θ) (19)
-
Vol. 2 ELASTICITY, RUBBER-LIKE 227
0.4
0.3
0.2
0.1
0.00 1 2 3 4 5 6
W(r
)
A
B
Fig. 9. Distribution function W(r) for a six-link random chain,
with length l = 1 in arbi-trary units: A, Gaussian limit; B,
inverse Langevin function (7). Courtesy of Oxford Uni-versity
Press.
In the particular case of a tetrahedrally bonded chain, θ =
109.5◦ andr2 = 2nl2, twice the value for a freely jointed chain.
Thus, a real chain is quitedifferent from this ideal
representation. Nevertheless, any flexible real chain canbe
represented by a simple model which is the statistical equivalent
of a freelyjointed chain (87,88). The two conditions are that the
real and freely jointed chainshave the same mean-square end-to-end
distance and the same length at completeextension:
r2 = r2e = nel2e (20)
and
R= Re = nele (21)
Thus, only one model chain is equivalent to the real one,
obeying the sameGaussian distribution function and composed of ne
segments of length le givenby
ne = R2/r2 (22)
le = r2/R (23)
-
228 ELASTICITY, RUBBER-LIKE Vol. 2
Chain with Bond-Angle Restrictions and Hindered Rotations.
Theangle of rotation φ of a single bond around the axis formed by
the preceding onemay be restricted by steric interferences between
atoms. When n is large and theaverage value of cos φ, ie, cos φ, is
not too close to unity, the following relationshipcan be
established (89,90):
r2 = nl2(
1 − cos θ1 + cos θ
)(1 + cos φ1 − cos φ
)(24)
When the rotation is not hindered, ie, when cos φ = 0, equation
(24) is equivalentto equation (19).
The conformations of polymer chains may be generated by a Monte
Carlosimulation method. The dimensions of linear chains,
unperturbed by excluded-volume interactions, have been measured in
various solvents by light scattering, x-ray small-angle scattering,
and dilute-solution viscosity measurements. They arereported most
comprehensively in the Polymer Handbook (91,92). A powerful toolto
investigate chain conformations in unswollen and swollen melts and
networksis small-angle neutron scattering (sans) (67,93–97).
The Equation of State for a Single Polymer Chain. The variation
inthe Helmholtz free energy is the negative of the work of
deformation in isothermalelongation
dA= −dW = f dr (25)
with
dA= dU − TdS (26)
The tensile force f on a polymer chain for a given length r
is
f =(
∂ A∂r
)T
=(
∂U∂r
)T
− T(
∂S∂r
)T
(27)
In freely jointed and freely rotating model chains, no rotation
is preferred;therefore, the internal energy is the same for all the
conformations. Then,
f = −T(
∂S∂r
)T
(28)
The entropy is given by the Boltzmann relation
S= k ln � (29)
where k is the Boltzmann constant, and �, the total number of
configurationsavailable to the system, is proportional to W(r) (eq.
(13)). Calculation of the forcegives
f = 2kTb2r (30)
-
Vol. 2 ELASTICITY, RUBBER-LIKE 229
f = 2kTr/r2 (31)
Thus, f is directly proportional to the absolute temperature and
to r, which meansthe chain acts as a Hookean spring with modulus
3kT/r2. The use of a non-Gaussian distribution for � leads to
(71,85,86)
f = (kT/l)L− 1(r/nl) (32)
Classical Thermodynamics of Rubber-like Elasticity
In experiments concerning the relationships between length,
temperature, andforce, usually the change in force with temperature
at constant length is recorded(53,98–101). It is therefore
necessary to extend the thermodynamic treatment ofthe elasticity.
Moreover, the force is not purely entropic, and the energetic
contribu-tion carries useful information on the dependence on
temperature of the averageend-to-end distance of the network chains
in the unstrained state (21,102). It istherefore important to know
how to deduce these quantities from a thermoelasticexperiment.
The change in internal energy during stretching an elastic body
is
dU = dQ − dW (33)
where dQ is the element of heat absorbed by the system and dW
the element ofwork done by the system on the surroundings. In a
reversible process,
dQ = TdS (34)
where S is the entropy of the body. The work dW can be expressed
as the sum
−dW = −pdV + f dL (35)
where p is the equilibrium external pressure, dV the volume
dilation accompany-ing the elongation of the elastomer, and f the
equilibrium tension. Thus,
dU = TdS− pdV + f dL (36)
At constant pressure, the enthalpy change is
dH = dU + pdV = TdS+ f dL (37)
A deformation dL at constant pressure and temperature induces a
retractive force
f =(
∂ H∂L
)T,p
− T(
∂S∂L
)T,p
(38)
Expression 38 is one of the forms of the thermodynamic elastic
equation of state.Measurements of stress at constant length as a
function of temperature have been
-
230 ELASTICITY, RUBBER-LIKE Vol. 2
20 40 60 800
0.1
0.2
0.3
0.4
0.5
Str
ess,
N/m
m2
60
50
40
30
20
15
10
531
Temperature, °C
Fig. 10. Stress–temperature curves for sulfur-vulcanized natural
rubber (99,103). Cour-tesy of the American Chemical Society.
performed (see Fig. 10) (97,103–105). All the curves appear to
be straight lines;the slope increases with increasing elongation,
but for very small elongations, theslopes can be negative. This
phenomenon, called the thermoelastic inversion, isdue to the volume
expansion occurring in any elastomer. The condition of
constantlength does not correspond to constant elongation as well,
since the sample’s un-strained reference length changes with
temperature. The inversion is suppressedby correction of the
original length (11).
The energetic and entropic contributions to the force in the
intramolecularprocess of stretching the chains can be obtained in
experiments where there is noother energetic contribution resulting
from changes in (intermolecular) van derWaals forces. Therefore,
these experiments must be performed at constant volume.A basic
postulate of the elasticity of amorphous polymer networks is that
the stressexhibited by a strained polymer network is assumed to be
entirely intramolecularin origin. That is, intermolecular
interactions play no role in deformations atconstant volume and
composition.
An equation similar to equation (38) is obtained for the elastic
force measuredat constant volume:
f =(
∂U∂L
)T,V
− T(
∂S∂L
)T,V
(39)
-
Vol. 2 ELASTICITY, RUBBER-LIKE 231
The variation in the Helmholtz free energy has the following
expression:
dA= −SdT − pdV + f dL (40)
The second derivative obtained by differentiating ( ∂ A∂L )V,T
with respect to T at
constant V and L is identical with that obtained by
differentiating ( ∂ A∂T )V,L with
respect to L at constant V and T:
−(
∂ f∂T
)V,L
=(
∂S∂L
)V,T
(41)
Thus, equation (39) can be written as
f =(
∂U∂L
)T,V
+ T(
∂ f∂T
)V,L
(42)
The energetic and entropic components of the elastic force, f e
and f s, respectively,are obtained from thermoelastic experiments
using the following equations:
fe =(
∂U∂L
)T,V
= f − T(
∂ f∂T
)V,L
(43)
fs = −T(
∂S∂L
)T,V
= T(
∂ f∂T
)V,L
(44)
An example of thermoelastic data is given in Figure 11 (99). The
change inentropy with elongation up to 350% is responsible for more
than 90% of the totalstress at room temperature, whereas the
contribution of internal energy is lessthan 10%. Thus, the
restoring force is due almost entirely to the tendency of
theextended rubber molecules to return to their unperturbed, random
conformationalstates. Above 350%, crystallization appears. This is
a specific feature of stereo-regular rubbers, such as natural
rubber which is capable of crystallization. Dataconcerning most of
the polymers studied in this manner are reviewed in References21
and 106.
Statistical Treatment of Rubber-like Elasticity
A network is an ensemble of macromolecules linked together, each
of them re-arranging its configurations by Brownian motion.
Classical thermodynamics ex-plains the behavior of elastomers with
regard to force, temperature, pressure, andvolume, but does not
give the relationship between the molecular structure of thenetwork
and elastic quantities such as the moduli. Therefore, statistical
mechan-ics was introduced in the 1940s (16,86,87,107–109), and its
theoretical predictionswere tested (110–112). Because of the
complexity of network structures, two mod-els based on affine and
phantom networks were studied. The cross-linking points
-
232 ELASTICITY, RUBBER-LIKE Vol. 2
Elongation, %0
0
0.2
−0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
2.4
50 100 150 200 250 300 350 400
Str
ess,
N/m
m2
f
fe
fs
Fig. 11. Plot of the energetic (f e) and entropic (f s)
contributions to the stress at 20◦Cfor sulfur-vulcanized rubber
(99). N/mm2 = MPa; to convert MPa to psi, multiply by 145.Courtesy
of the American Chemical Society.
of the affine network are fixed, whereas those of the phantom
network can un-dergo fluctuations independent of their immediate
surroundings. The effects ofthe macroscopic strain are transmitted
to the chains through these junctions atwhich the chains are
multiply joined, with the internal state of the network
systemspecified in terms of the positions of the cross-linkages.
Deformation transformsthe arrangements of these points. The system
is represented by the vectors ri,each of which connects the two
ends of a chain. For a given end-to-end vector ri,the number of
available configurations is directly proportional to the
probabilityW(ri) or relative number of configurations.
Representation of W(r) by a Gaussianfunction according to equation
(13) fails as r approaches the maximum extensionrmax. Experimental
evidence of deviations from the Gaussian theory have beenreported
(24,113–116) and non-Gaussian theories based on an expression for
W(r)similar to equation (16) have been developed (84,85,117–119).
These theories havethe disadvantage of containing parameters that
can be determined only by com-parisons between theory and
experiments, specifically ν, the number density ofchains in the
network, and n, the number of statistical links.
The tensile force is expressed by
f/A0 = (1/3)vkTn1/2[L− 1(λn− 1/2) − λ− 3/2L− 1(λ− 1/2n− 1/2)]
(45)
-
Vol. 2 ELASTICITY, RUBBER-LIKE 233
where
L− 1(t) = 3t + (9/5)t3 + (297/175)t5 + · · ·
and A0 is the cross-sectional area of the unstrained sample. The
number n of ran-dom links may be obtained by birefringence and
stress–strain measurements, andfrom this result, an estimation of
the number of monomer units in the equivalent-random link (of the
Kuhn–Grün theory) of the polymeric chain (120). Anotherapproach to
a non-Gaussian theory utilizes information provided by rotational
iso-meric state theory on the spatial configurations of chain
molecules (83), includingmost of those used in elastomeric
networks. Specifically, Monte Carlo calculations(121–123) based on
the rotational isomeric state approximation are used to sim-ulate
spatial configurations followed by distribution functions for the
end-to-endseparation r of the network chains (124).
The theory in the Gaussian limit has been refined greatly to
take into ac-count the possible fluctuations of the junction
points. In these approaches, theprobability of an internal state of
the system is the product of the probabilitiesW(ri) for each chain.
The entropy is deduced by the Boltzmann equation, and thefree
energy by equation (26). The three main assumptions introduced in
the treat-ment of elasticity of rubber-like materials are that the
intermolecular interactionsbetween chains are independent of the
configurations of these chains and thus ofthe extent of deformation
(125,126); the chains are Gaussian, freely jointed, andvolumeless;
and the total number of configurations of an isotropic network is
theproduct of the number of configurations of the individual
chains.
Affine Networks. Diffusion of the junctions about their mean
positionsmay be severely restricted by neighboring chains sharing
the same region ofspace. The extreme case is the affine network
where fluctuations are completelysuppressed, and the instantaneous
distribution of chain vectors is affine in thestrain. The elastic
free energy of deformation is then given by
�Ael(aff) = (1/2)vkT(I1 − 3) − (v − ξ )kT ln(V/V0) (46)
where I1 is the first invariant of the tensor of deformation
I1 = λ2x + λ2y + λ2z (47)
The quantities λx, λy, and λz are the principal extension
ratios, which specify thestrain relative to an isotropic state of
reference having volume V0; V is the volumeof the deformed
specimen, and ν is the number of linear chains whose ends arejoined
to multifunctional junctions of any functionality φ > 2. (The
functionalityof a junction is defined as the number of chains
connected to it.) The cycle rank ξ(102) represents the number of
chains that have to be cut to reduce the networkto an acyclic
structure or tree (127). The cycle rank is the difference between
thenumber of effective chains ν and effective junctions µ of
functionality φ > 2:
ξ = ν − µ (48)
-
234 ELASTICITY, RUBBER-LIKE Vol. 2
Isotropic state Deformed state
V
L
V0
L0
Fig. 12. Simple extension of an unswollen network prepared in
the undiluted state (99).Courtesy of the American Chemical
Society.
For a perfect network of functionality φ,
ξ = (1 − 2/φ)ν (49)
Simple Extension. The most general case is an extension with
change insample volume, as illustrated in Figure 12. The strain
along the direction ofstretching is given by λx as
λ = λx = L/L0 (50)
Since the volume changes from V0 to V,
λxλyλz = V/V0 (51)
Because there is symmetry about the x axis, λy = λz. Combining
equations (50)and (51) leads to
λy = λz = (V/λV0)1/2 (52)
The force f is the derivative of the free energy with respect to
length; specifically,
f =(
∂�A∂L
)T,V
= (1/L0)(
∂�A∂λ
)T,V
(53)
Using equation (46),
f = (vkT/L0)[λ − V/(V0λ2)] (54)
It is also possible to deduce the expression for the force as a
function of the ex-tension α measured relative to the length Lvi of
the unstretched sample when itsvolume is fixed at the same volume V
as occurs in the stretched state:
α = L/Liv = λL0/Liv (55)
and
L0 = Liv(V/V0)− 1/3 (56)
-
Vol. 2 ELASTICITY, RUBBER-LIKE 235
Equation (54) is then transformed to
f = (vkT/Liv)(V/V0)2/3(α − 1/α2). (57)Energetic Contributions.
Equation (57) can be used for the molecular in-
terpretation of the ratio f e/f . Thus, equation (43) can be
rewritten as
fe = f − T(
∂ f∂T
)V,L
= − f T(
∂ln( f/T)∂T
)V,L
(58)
or
fef
= −T(
∂ln( f/T)∂T
)V,L
(59)
The derivative of f at constant volume and length, thus at
constant α, can beobtained from equation (57), with the result
fe/ f = (2/3)T(dln V0/dT) = T(dln r20
/dT
)(60)
since V0 is the volume of the isotropic state so defined that
the mean square ofthe magnitude of the chain vectors equals r20,
the value for the free unperturbedchains.
The intramolecular energy changes arising from transitions of
chains fromone spatial configuration to another are, by equation
(60), directly related tothe temperature coefficient of the
unperturbed dimensions. It is interesting tocompare the
thermoelastic results for polyethylene (128), f e/f = −0.45,
andpoly(dimethylsiloxane) (129), f e/f = 0.25. The preferred
(lowest energy) confor-mation of the polyethylene chain is the
all-trans form, since gauche states at rota-tional angles of ±120◦
cause steric repulsions between CH2 groups (83). Since
thisconformation has the highest possible spatial extension,
stretching a polyethylenechain requires switching some of the
gauche states, which are, of course, present inthe randomly coiled
form, to the alternative trans states (106,130). These
changesdecrease the conformational energy and are the origin of the
negative type of ide-ality represented in the experimental value of
f e/f . (This physical picture alsoexplains the decrease in
unperturbed dimensions upon increase in temperature.The additional
energy causes an increase in the number of the higher energygauche
states, which are more compact than the trans ones.) The opposite
be-havior is observed in the case of poly(dimethylsiloxane) (26).
The all-trans formis again the preferred conformation; the
relatively long Si O bonds and the un-usually large Si O Si bond
angles reduce steric repulsion in general, and thetrans
conformation places CH3 side groups at distances of separation
where theyare strongly attractive (83,129,131). Because of the
inequality of the Si O Siand O Si O bond angles, however, this
conformation is of very low spatial ex-tension. Stretching a
poly(dimethylsiloxane) chain therefore requires an increasein the
number of gauche states. Since these are of higher energy, this
explainsthe fact that deviations from ideality for these networks
are found to be positive(106,129,130).
-
236 ELASTICITY, RUBBER-LIKE Vol. 2
Isotropic drystate 1 Isotropic swollenstate 2
Deformed swollenstate 3
V
L
V
L0
V0
Li�
Fig. 13. Simple extension of a swollen network.
Simple Extension of Swollen Networks. The force required to
deform anelastomeric sample, from state 2 to state 3 in Figure 13,
is given by equation (57),in which α = L/Liv is the extension ratio
for the isotropic swollen state relative tothe deformed swollen
state. The ratio V0/V is the volume fraction v2 of polymerin the
swollen system, and A0 is the cross-sectional area of the dry
sample, whichis generally measured before the experiment. The area
of the swollen sample isgiven by
Aiv = A0(V/V0)2/3 (61)
Equation (56), of course, still holds, and L0A0 = V0. In an
experiment, the force fis measured as a function of elongation.
Under these conditions,
f/A0 = (νkT/L0 A0)v− 1/32 (α − 1/α2) (62)
Hence, the quantity [ f ∗]≡v1/32 /A0(α − 1/α2) should be a
constant, independent ofthe degree of swelling, and be equal to
vkT/V0. As shown later [f∗] is commonlyplotted versus 1/α to
determine deviations from theory (112,132,133).
Simple Extension of Networks Cross-linked in the Diluted State.
Thepolymer is dissolved, cross-linked, and dried. The stress–strain
measurementsare carried out on the dry network, as illustrated in
Figure 14. Equation (57)also holds for this case. If Aiv is the
cross-sectional area of the undeformed dryspecimen, the force per
unit undeformed area is
f/Aiv = (νkT/V)(V/V0)2/3(α − 1/α2) (63)
Reference statefor cross-linking
process
Dry, undeformedstate
Dry, deformedstate
L0
V0 V V
LLi�
Fig. 14. Simple extension of an unswollen network cross-linked
in the diluted state(V0 > V).
-
Vol. 2 ELASTICITY, RUBBER-LIKE 237
which is (V/V0)2/3 times the tension of a network cross-linked
in the dry state(111,134).
The Affine Shear Modulus. For V = V0, equation (54) becomes
f/A0 = (νkT/V0)(λ − 1/λ2) (64)
Making use of equation (2) gives λ = 1 + �. For small values of
�, � � 1, equation(64) may be written as
f/A0 = 3(νkT/V0)� (65)
The tensile modulus Eaff is three times the shear modulus Gaff,
since Poisson’sratio for elastomers is close to 0.5.
Specifically,
Eaff = 3vkT/V0 = 3Gaff (66)
and hence,
Gaff = vkT/V0 (67)
If v/V0 is the molar number density of chains [equal to ρ/Mc for
a perfect network,where ρ is the elastomer density and Mc is the
molecular weight between cross-link points (in g/mol)], then
Gaff = vRT/V0 (68)
where R is the gas constant. In the remaining material, v is a
molar quantityunless it is followed by the Boltzmann constant
k.
For an affine perfect network,
Gaff = ρRT/Mc (69)
As a numerical example, the affine shear modulus of a perfect
poly(dimethylsiloxane) tetrafunctional network of density ρ = 0.97
g/cm3 and Mc =11,300 g/mol is Gaff = 0.212 × 106 N/m2. However,
imperfections such as chainends exist in typical networks, as
illustrated in Figure 6. The following correc-tion can be made to
account for this circumstance (16). Before the
cross-linkingreaction, it is assumed that vm chains of length Mn
are present in the melt, withvm = ρ/Mn. Each chain has two ends,
thus there are 2ρ/Mn chain ends. After thecross-linking process,
there are v0 chains of length Mc, v0 = ρ/Mc, along with the2ρ/Mn
chain ends. Therefore the number of chains that are elastically
effective is
v = ρ/Mc − 2ρ/Mn = (ρ/Mc)(1 − 2Mc/Mn) (70)
This correction is small for Mc � Mn, which is frequently the
case.
-
238 ELASTICITY, RUBBER-LIKE Vol. 2
Phantom Networks. In this idealized model, chains may move
freelythrough one another (135). Junctions fluctuate around their
mean positions be-cause of Brownian motion, and these fluctuations
are independent of deforma-tion. The mean square fluctuations �r2
of the end-to-end distance r are relatedto the mean square of the
end-to-end separation of the free unperturbed chainsr2(102,136,137)
by
�r2/r20 = 2/φ (71)
The fluctuation range (�r2 = r20/2 for a tetrafunctional
network) is generally quitelarge and of considerable importance.
The instantaneous distribution of chainvectors r is not affine in
the strain because it is the convolution of the distributionof the
affine mean vector r with the distribution of the fluctuations �r,
which areindependent of the strain. The elastic free energy of such
a network is
�Ael(ph) = (1/2)ξkT(I1 − 3) = (1/2)(ν − µ)kT(I1 − 3) (72)
In simple extension, the equivalent of equation (62) is now
f/A0 = (ν − µ)kTV − 10 v− 1/32 (α − 1/α2) (73)
and the shear modulus is given by
Gph = (v − µ)RT/V0 (74)
For a perfect network of functionality φ, equation (49) holds,
and therefore,
Gph = (1 − 2/φ)vRT/V0 (75)
Gph = (1 − 2/φ)ρRT/Mc (76)
The relationship between affine and phantom moduli is then
Gph = (1 − 2/φ)Gaff (77)
For example, Gaff is twice Gph for a perfect tetrafunctional
network.Comparisons With Experimental Results. Stress–strain
measure-
ments in uniaxial extension can be compared with the prediction
of an affineGaussian network (eq. (64)), as illustrated in Figure
15 (113). The Gaussian re-lationship in the affine limit is valid
only at small deformations. The best fit isobtained using Gaff =
0.39 MN/m2 (56.6 psi) (7); deviations occur when λ > 1.5.The
experimental curve may nevertheless be well represented by
adjusting theparameters of the non-Gaussian stress–strain
relationship (eq. (45)) (84,117,138).These disagreements between
experiments and the simple predictions of statis-tical mechanics
have led some workers to develop a phenomenological theory
ofrubber-like elasticity.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 239
Extension ratio
Tens
ile fo
rce
per
unit
unst
rain
ed a
rea,
N/m
m2
Theoretical
1 2 3 4 5 6 7 80.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
Fig. 15. Stress–strain isotherms in simple elongation;
comparison of experimental curve(open circles) with theoretical
prediction (eq. (64)) (113). To convert N/mm2 to psi, multiplyby
145. Courtesy of The Royal Society of Chemistry.
Phenomenological Theory. Continuum mechanics is used to
describemathematically the stress–strain relations of elastomers
over a wide range instrain. This phenomenological treatment is not
based on molecular concepts, buton representations of observed
behavior (132,139–143). The main goal is to find anexpression for
the elastic energy W stored in the system (assumed to be
perfectlyelastic, isotropic in its undeformed state, and
incompressible), analogous to thefree energy of the statistical
treatment. The condition of isotropy in the unstrainedstate
requires that W be symmetrical with respect to the three principal
extensionratios λx, λy, λz. A rotation of the material through
180◦, ie, a change of sign oftwo of the λi (i = x, y, z), does not
alter W (144). The three simplest even-poweredfunctions satisfying
these conditions are the strain invariants I1, I2, and I3
definedas
I1 = λ2x + λ2y + λ2z
I2 = λ2xλ2y + λ2yλ2z + λ2zλ2x
I3 = λ2xλ2yλ2z
(78)
The most general form of the strain–energy function, which
vanishes at zerostrain, for an isotropic material is the power
series
-
240 ELASTICITY, RUBBER-LIKE Vol. 2
W =∞∑
i, j,k= 0Cijk(I1 − 3)i(I2 − 3) j(I3 − 1)k (79)
In equation (79), the experimental results obtained at
sufficiently small strainsare well represented with two nonzero
terms, C100 and C010:
W = C100(I1 − 3) + C010(I2 − 3) (80)In uniaxial extension, the
so-called Mooney–Rivlin equation is obtained (17):
f υ1/32 /A0 = 2(C1 + C2/α)(α − 1/α2) (81)A convenient and
standard way to treat stress–strain data is to plot the
reducedforce
[ f ∗]≡ f ∗υ1/32 /(α − 1/α2) (82)versus 1/α, where f∗ is the
nominal stress f /A0 and υ2 the volume fraction ofpolymer in the
network, if swollen (Fig. 16).
In this scheme, the affine and phantom networks are represented
by hor-izontal lines (eqs. (62) and (73)) from equations [f∗] =
vRT/V0 and [f∗] =(v − µ)RT/V0, respectively. It has been reported
that C2 decreases as υ2 decreases,whereas C1 is approximately
constant, as illustrated in Figure 16 (112). In view
0.20
0.29
0.40
0.55
0.74
0.4 0.6 0.8 1.00.125
0.150
0.175
0.200
0.225
1/�
[f∗ ]
, N/m
m2
�2 � 1.00
Fig. 16. Plot of [f∗] versus 1/α for a natural rubber
vulcanizate swollen in benzene todemonstrate the influence of v2 on
C2 (114). To convert N/mm2 to psi, multiply by 145.Courtesy of The
Royal Society of Chemistry.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 241
of experimental results on swollen networks (69,114,145,146),
the following formof the strain energy per unit volume of dry
network is to be preferred:
W/V0 = C1(I1 − 3)+C2(I2 I − 1+m/23 − 3) (83)
The reduced force can be deduced (145) as [ f ∗] = 2C1+2C2v(4/3)
− m2 α − 1. The pa-rameter C1 of the swollen network is equal to C1
of the dry network, whereasC2 (swollen) is equal to C2 (dry) v
(4/3) − m2 . Experimentally, m was found to be 0 or
12 (145). The constant C1 increases with the cross-linking
density of the rubber(114,147), and 2C1 + 2C2 is approximately the
shear modulus at small defor-mation (148). Although there have been
many attempts (149–155), a molecularexplanation of C1 and C2 has
been achieved only recently, as is described later.
The experimental error range is of great importance. A 1% error
in the de-termination of λ has a tremendous effect on the Mooney
curve when 1/α > 0.9;this part of the curve is therefore highly
unreliable (156).
Statistical Theory of Real Networks. Affine and phantom networks
areextreme limits. Stress–strain measurements in uniaxial extension
have revealedthat the behavior of real networks is between these
limits. A theoretical attempthas been made to account for this
dependence of [f∗] on 1/α in terms of a gradualtransition between
the affine and phantom deformations (102,157), and a molec-ular
theory has been formulated (102,158–161). In this model, the
restrictions ofjunction fluctuations due to neighboring chains are
represented by domains of con-straints. At small deformations, the
stress is enhanced relative to that exhibitedby a phantom network.
At large strains, or high dilation, the effects of restrictionson
fluctuations vanish and the relationship of stress to strain
converges to that fora phantom network. In a later theoretical
refinement, the behavior of the networkis taken to depend on two
parameters. The most important is κ which measuresthe severity of
entanglement constraints relative to those imposed by the
phantomnetwork. Another parameter ζ takes into account the
nonaffine transformation ofthe domains of constraints with strain.
Topological and mathematical treatmentleads to the expression
[ f ∗] = fph(1 + fc/ fph) (84)
where f ph is the usual phantom modulus and f c/f ph is the
ratio of the force due toentanglement constraints to that for the
phantom network. A specific expressionfor f c/f ph in uniaxial
extension is
fc/ fph = (µ/ξ )[αK
(α21
)− α − 2K(α22)]/(α − 1/α2) (85)
where α1 = αv− 1/32 ,α2 = α − 1/2v− 1/32 , and µ/ξ is the ratio
of the number of effectivejunctions to the cycle rank. For a
perfect network, µ/ξ=2/(φ − 2). The functionK(x2) is given by
K(x2) = B[.B (B+ 1)− 1 + g( .g B+ g
.B )(gB+ 1)− 1] (86)
-
242 ELASTICITY, RUBBER-LIKE Vol. 2
with
g = x2[1/κ + ζ (x − 1)].g = 1/κ − ζ (1 − 3x/2)
B= (x − 1)(1 + x − ζ x2)/(1 + g)2.B = B[(2x(x − 1))− 1 − 2 .g (1
+ g)− 1 + (1 − 2ζ x)[2x(1 + x − ζ x2)]− 1]
It is interesting to note that junction fluctuations increase in
the direction ofstretching but decrease in the direction
perpendicular to it. Therefore the modu-lus decreases in the
direction of stretching, but increases in the normal direc-tion
since the state of the network probed in this direction tends to be
morenearly affine. The curve of [f∗] versus 1/α is sigmoidal. The
parameters κ and ζ ofpoly(dimethylsiloxane) networks are determined
in Figure 17 (155); the interceptof the sigmoidal curves is the
phantom modulus. This Flory–Erman theory hasbeen compared
successfully with such experiments in elongation and
compression(155,162,162–166). It has not yet been extended to take
account of limited chainextensibility or strain-induced
crystallization (167).
0.20
0.12
0.08
0.04
0 0.2 0.4 0.6 0.8 1
Mn � 4000 � � 0.1 � � 0
Mn � 9500 � � 3.4 � � 0 Mn � 18500 � � 30 � � 0.01
Mn � 25600 � � 24.5 � � 0
Mn � 32900 � � 16.2 � � 0
� � 31.5 � � 0.01
� � 27.5 � � 0� � 23 � � 0
� � 21.5 � � 0
1/�
[f*]
, N/m
m2
Fig. 17. Determination of the parameters κ and ζ of the
Flory–Erman theory for perfecttrifunctional poly(dimethylsiloxane)
networks (155). To convert N/mm2 to psi, multiply by145. Courtesy
of Springer-Verlag.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 243
Predictions for the Parameters κ and ζ . The parameter ζ is not
far fromzero, which is to be expected since the surroundings of
junctions cause their defor-mation to be nearly affine with the
macroscopic strain. The primary parameter κis defined as the ratio
of the mean-square junction fluctuations in the equivalentphantom
network, ie, in the absence of constraints, to the mean-square
junctionfluctuations about the centers of domains of entanglement
constraints (in theabsence of the network) in the isotropic state.
Thus in a phantom network, theabsence of constraints leads to κ =
0. In an affine one, the complete suppressionof fluctuations is
equivalent to κ = ∞. It has been proposed that κ should be
pro-portional to the degree of interpenetration of chains and
junctions (165). Since anincreasing number of junctions in a volume
pervaded by a chain leads to strongerconstraints on these
junctions, κ was taken to be
κ = I(r20)3/2(µ/V0) (87)where I is a constant of
proportionality, (r20)
3/2 is assumed to be proportional tothe volume occupied by a
chain, and µ/V0 is the number of junctions per unitvolume. The
mean-square unperturbed dimension r20 can be taken proportional
toMc (95), the molecular weight between cross-links, and µ/V0 to M−
1c for a perfecttetrafunctional network; therefore κ � M1/2c
(93,155,165).
Swelling Equilibrium. The isotropic swelling of a cross-linked
elastomerby a liquid has two important opposing effects: the
increase in mixing entropy ofthe system because of the presence of
the small molecules, and the decrease in con-figurational entropy
of the network chains by dilation. Therefore, an equilibriumdegree
of swelling is established, which increases as the cross-linking
density de-creases (168–170). The free energy change �A for this
process is usually assumedto be separable into the free energy of
mixing, �Am, and the elastic free energy�Ael,
�A= �Am + �Ael (88)
although questions have been raised with regard to this
separability (171,172).The contribution �Am has been calculated
with the help of a lattice model (173,174). The other contribution
�Ael is given in the later Flory–Erman theory (161)by
�Ael = �Ael(ph) + �Ac (89)
where �Ael(ph) is given by equation (72); �Ac is the additional
term which ac-counts for the constraints and is given by
�Ac = µkT/2∑
i=x,y,z{[1 + g(λi)]B(λi) − ln[(B(λi) + 1)(g(λi)B(λi) + 1)]}.
(90)
The λi are the principal extension ratios, and g and B have been
defined in equation(86).
-
244 ELASTICITY, RUBBER-LIKE Vol. 2
The chemical potential of the solvent in the swollen network
is
µ1 − µ01 = N(
∂�Am∂n1
)T,p
+ N(
∂�Ael∂λ
)T,p
(∂λ
∂n1
)T,p
(91)
where n1 is the number of moles of solvent, and the isotropic
extension ratio λ is
λ = λx = λy = λz = [(n1V1 + V0)/V0]1/3 = v− 1/32 (92)where V1 is
the molar volume of the solvent and V0 the volume of the dry
network.At swelling equilibrium, µ1 = µ01. Hence, the standard
expression for �Am (3) leadsto
ln(1 − υ2m) + υ2m + χυ22m = −(
∂�Ael∂λ
)T,p
(∂λ
∂n1
)T,p
(RT)− 1 (93)
where v2m is the volume fraction of polymer at swelling
equilibrium. The inter-action parameter χ1 may be determined, for
example, by vapor pressure or byosmometry measurements
(145,175–178). It depends on the concentration of poly-mer in the
polymer–solvent system (175). Using the Flory–Erman expression
forthe elastic energy and assuming the parameter κ to be
independent of swelling(isotropic swelling does not change the
relative topology of the network), equation(93) (with the left-hand
side abbreviated as H) becomes
H = − (ξ/V0)V1v1/32m[1 + (µ/ξ )K(v− 2/32m )] (94)
The molecular weight Mc between cross-links of a perfect network
is then obtainedby combination of equations (48),(49), and (94),
with v/V0 = ρ/Mc:
Mcr = (2/φ − 1)ρV1υ1/32m[1 + (ϕ/2 − 1)− 1K(V1υ − 2/32m )]/H
(95)
where the subscript r is employed here for real networks.For a
network deforming affinely, κ = ∞, K(λ2) = 1 − λ− 2, and
Mca = − ρV1υ1/32m(1 − 2υ2/32m /φ
)]/H (96)
For a phantom network, κ = 0, K(λ2) = 0, and
Mcp = (2/φ − 1)ρV1υ1/32m/
H (97)
Determination of the Degree of Cross-linking by
Stress–StrainMeasurements and by Swelling Equilibrium
Characterization of network structures is often the main
objective of theoreticaland experimental works in the field of
rubber elasticity (179–183). Simple experi-ments such as swelling
equilibrium have been extensively used. However, most ofthe
experimental swelling results on cross-linked polymers have been
interpretedusing the Flory–Rehner expression for an affinely
deforming network (6,184–186).
-
Vol. 2 ELASTICITY, RUBBER-LIKE 245
The modern theory of real networks now permits a more accurate
determina-tion of network structures through use of equations
(84),(87), and (95) (187–204).Stress–strain measurements can be
analyzed as shown in Figure 17. The phantommodulus thus determined
leads to ν and Mc through equations (75) and (76) (189).Swelling
equilibrium data are similarly analyzed through equation (94), with
theparameter κ given by equation (87) (189).
If Mc and κ have been determined previously from stress–strain
measure-ments, then the interaction parameter χ1 may be calculated
through equation(95) (187,190).
Entanglements
Entanglements have been introduced in the later Flory–Erman
theory as con-straints that restrict junction fluctuations. Another
viewpoint considers entangle-ments to act as physical cross-links,
being based, in part, on the observation thatlinear polymers of
high molecular weight exhibit a storage modulus G′(ω), whichremains
relatively constant over a wide range of frequencies ω (205). This
plateaumodulus G0N is independent of chain length for long chains
and is insensitive totemperature. Since it varies with the volume
fraction of polymer in concentratedsolutions, it could be due to
pair-wise interactions between chains (20), and a uni-versal law
has been proposed for the dependence of G0N on the chemical
structureof the polymer (206). During the cross-linking process,
some of such interactionsor entanglements could be trapped in the
network and act as physical junctions.This conclusion has been
tested by irradiation cross-linking of already deformednetworks
(207–209), and then measuring the dimensional changes.
In the simplest phenomenological approach for rubber-like
elasticity oftrapped entanglements at small deformation (210,211),
the shear modulus istaken to be the sum of two terms:
G = Gc + GeTe (98)where Gc is the contribution of the chemical
cross-links. Taking into account therestrictions of junction
fluctuations, as in the Flory theory, leads to
Gc = (v − hµ)RT (99)in which the empirical parameter h was
introduced (153). Its value, between 0(affine) and 1 (phantom),
characterizes the nature of the networks at small de-formation; h
can also be expressed as a function of the Flory parameters κ andζ
(155,212). The additional contribution GeTe is said to arise from
permanentlytrapped (interchain) entanglements in the network. The
modulus Ge is thought tohave a value close to G0N, and Te, the
“trapped entanglement factor,” is the proba-bility that all of the
four directions from two randomly chosen points in the system,which
may potentially contribute an entanglement, lead to the gel
fraction.
The idea of entanglements acting as physical junctions was
originally de-veloped in the literature to explain deviations from
the predictions for affinenetworks (185,213). The possibility of a
contribution at equilibrium caused bytrapped entanglements has been
tested with model networks, ie, those preparedin such a way that
the number and functionality of the cross-links are known. A
-
246 ELASTICITY, RUBBER-LIKE Vol. 2
typical, highly specific reaction used for this purpose is the
end-linking of function-ally terminated polymer chains. Specific
examples would be hydroxyl-terminatedor vinyl-terminated chains of
poly(dimethylsiloxane), [Si(CH3)2O]x , end-linkedwith an organic
silicate or silane (214,215). A considerable body of published
datahas, in fact, been interpreted as proving the existence of a
trapped-entanglementcontribution in this kind of network (216–222).
Typically, the network charac-teristics, eg, number of chains and
junctions, extent of cross-linking reaction p,trapped entanglement
factor Te, and effective functionality φe, were calculated bythe
branching theory after measurement of the network sol fraction. The
mainassumption of this probabilistic method is that the sol
fraction, after subtractionof the amount of nonreactive species as
determined by gel permeation chromatog-raphy analysis (218), is
composed only of primary reactive chains (223). On thecontrary,
however, the sol fraction is a complicated mixture of reactive,
unreactive,reacted, and unreacted molecules. For example,
simulation of nonlinear polymer-izations has shown that about half
of the sol molecules are (reacted) cyclics (224).Their presence
indicates that the value of the extent of the cross-linking
reac-tion, formerly calculated with the assumption that the sol
fraction is composed ofnonreacted reagents, has to be significantly
increased. As a result, many modelnetworks can be considered as
nearly perfect. This casts some doubt on the resultsinterpreted as
showing an entanglement contribution at equilibrium. If these
net-works are considered as perfect, such a contribution does not
seem to be important(155,225). Entanglement contributions have been
reported for polybutadiene (153)and ethylene–propylene copolymer
(154) networks prepared by radiation-inducedcross-linking. Again
some doubt exists on the method used to characterize thenetwork
structure.
Molecular models treating entanglements as interstrand links
that are freeto slip along the strand contours have been developed
(226–228) and tube mod-els have been investigated (229,230). These
approaches have been reviewed inReference 27.
The question of entanglements is still controversial. It has
been postulated(160) that an entanglement cannot be equivalent to a
chemical cross-link. Con-tacts between a pair of entangled chains
are transitory and of short duration owingto the diffusion of
segments and associated time-dependent changes of configura-tions.
Such trapped entanglements as previously described are possibly of
minorimportance in equilibrium stress measurements.
BIBLIOGRAPHY
“Elasticity, Rubber-like” in EPSE 2nd ed., Vol. 5, pp. 365–408,
by J. P. Queslel and J. E.Mark, University of Cincinnati.
1. D. R. Lide, ed., Handbook of Chemistry and Physics, 62nd ed.,
CRC Press, Cleveland,Ohio, 1981–1982, p. F-91.
2. J. Gough, Mem. Lit. Phil. Soc. Manchester 2nd Ser. 1, 288
(1805).3. P. J. Flory, Principles of Polymer Chemistry, Cornell
University Press, Ithaca, N.Y.,
1953, p. 434.4. Lord Kelvin, Q. J. Math. 1, 57 (1857).5. J. P.
Joule, Philos. Trans. R. Soc. London, Ser. A 149, 91 (1859).6. Ref.
3, Chapt. “XI”.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 247
7. L. R. G. Treloar, The Physics of Rubber Elasticity, 3rd ed.,
Clarendon Press, Oxford,U.K., 1975.
8. A. V. Tobolsky, Properties and Structure of Polymers, John
Wiley & Sons, Inc., NewYork, 1960.
9. F. Bueche, Physical Properties of Polymers,
Wiley-Interscience, New York, 1962, pp.37, 225.
10. A. R. Payne and J. R. Scott, Engineering Design with Rubber,
MacLaren and Sons,London, 1960, p. 7.
11. D. J. Williams, Polymer Science and Engineering,
Prentice-Hall, Englewood Cliffs,N.J., 1971, Chapt. “9”.
12. A. N. Gent, B. Erman, and J. E. Mark, in J. E. Mark, B.
Erman, and F. R. Eirich, eds.,Science and Technology of Rubber, 2nd
ed., Academic Press, Inc., New York, 1994, pp.1, 189.
13. J. J. Aklonis and W. J. MacKnight, Introduction to Polymer
Viscoelasticity, 2nd ed.,John Wiley & Sons, Inc., New York,
1983, p. 102.
14. J. W. S. Hearle, Polymers and Their Properties, Vol. 1, John
Wiley & Sons, Inc., NewYork, 1982, p. 153.
15. P. Meares, Polymers: Structure and Bulk Properties, Van
Nostrand Reinhold Co., Inc.,New York, 1965, p. 160.
16. P. J. Flory, Chem. Rev. 35, 51 (1944).17. W. R. Krigbaum and
R.-J. Roe, Rubber Chem. Technol. 38, 1039 (1965).18. K. Duek and W.
Prins, Adv. Polym. Sci. 6, 1 (1969).19. K. J. Smith Jr. and R. J.
Gaylord, Rubber Age 107(6), 31 (1975).20. W. W. Graessley, Adv.
Polym. Sci. 16, 1 (1974).21. J. E. Mark, J. Polym. Sci. Macromol.
Rev. 11, 135 (1976).22. R. G. C. Arridge, Adv. Polym. Sci. 46, 67
(1982).23. K. Duek, Adv. Polym. Sci. 44, 164 (1982).24. L. R. G.
Treloar, Rep. Prog. Phys. 36, 755 (1973).25. J. E. Mark, J. Educ.
Mod. Mater. Sci. Eng. 4, 733 (1982).26. J. E. Mark, J. Chem. Educ.
58, 898 (1981).27. B. E. Eichinger, Ann. Rev. Phys. Chem. 34, 359
(1983).28. M. C. Boyce and E. M. Arruda, Rubber Chem. Technol. 73,
504 (2000).29. K. J. Smith Jr., Comprehensive Polymer Science, 2nd
supplement, Elsevier, Oxford,
1996.30. O. H. Yeoh, Comprehensive Polymer Science, 2nd
supplement, Elsevier, Oxford,
1996.31. A. N. Gent, in A. N. Gent, ed., Engineering with
Rubber: How to Design Rubber Com-
ponents, Hanser, Munich, 1992, p. 33.32. J. E. Mark, M. A.
Sharaf, and B. Erman, in S. M. Aharoni, ed., Synthesis,
Character-
ization, and Theory of Polymeric Networks and Gels, Plenum, New
York, 1992.33. A. Kloczkowski, J. E. Mark, and B. Erman,
Macromolecules 28, 5089 (1995).34. J. E. Mark and B. Erman, in R.
F. T. Stepto, ed., Polymer Networks, Blackie Academic
Chapman and Hall, Glasgow, 1998.35. B. Erman and J. E. Mark, in
W. Brostow, ed., Performance of Plastics, Hanser, Munich,
2000.36. J. E. Mark, in C. Carraher and C. Craver, eds., Applied
polymer Science—21st Century,
American Chemical Society, Washington, D.C., 2000.37. R. P.
Brown, Elastomerics 115, 46 (1983).38. L. E. Nielsen, Mechanical
Properties of Polymers and Composites, Vol. 1, Marcel
Dekker, Inc., New York, 1974, pp. 5, 39.39. D. W. van Krevelen,
Properties of Polymers: Correlations with Chemical Structure,
Elsevier, Amsterdam, 1972, p. 147.
-
248 ELASTICITY, RUBBER-LIKE Vol. 2
40. F. S. Conant, in M. Morton, ed., Rubber Technology, Van
Nostrand Reinhold Co., Inc.,New York, 1973, p. 114.
41. P. G. Howgate, in C. Hepburn and R. J. W. Reynolds, eds.,
Elastomers: Criteria forEngineering Design, Applied Science,
London, 1979, p. 127.
42. E. R. Praulitis, I. V. F. Viney, and D. C. Wright, in Ref.
41, p. 139.43. Ref. 10, pp. 123, 225.44. Ref. 15, p. 179.45. S
Standards, Rubber, Natural and Synthetic—General Test Methods, and
Materi-
alscos Part 09:01, American Society for Testing and Materials,
Philadelphia, Pa.46. W. K. Moonan and N. W. Tschoegl,
Macromolecules 16, 55 (1983).47. O. Posfalvi, Kautsch. Gummi
Kunstst. 35, 940 (1982); L. M. Boiko, Ind. Lab. 49, 538
(1983).48. E. Galli, Plast. Compounding 5, 14 (1982).49. T. L.
Smith, Polym. Eng. Sci. 17, 129 (1977).50. R. R. Rahalkar, C. U.
Yu, and J. E. Mark, Rubber Chem. Technol. 51, 45 (1978).51. A. L.
Andrady and co-workers, J. Appl. Polym. Sci. 26, 1829 (1981).52. A.
J. Chompff and S. Newman, eds., Polymer Networks: Structural and
Mechanical
Properties, Plenum Press, New York, 1971, pp. 111, 193.53. M. C.
Shen, D. A. McQuarrie, and J. L. Jackson, J. Appl. Phys. 38, 791
(1967).54. Ref. 13, p. 29.55. W. O. Murtland, Elastomerics 114, 19
(1982).56. A. Whelan and K. S. Lee, eds., Development in Rubber
Technology—3 Thermoplastic
Rubbers, Applied Science Publishers, London, 1982.57. D. S.
Pearson and W. W. Graessley, Macromolecules 11, 528 (1978).58. P.
J. Flory, Macromolecules 15, 99 (1982).59. L. C. Case and R. V.
Wargin, Makromol. Chem. 77, 172 (1964).60. J. Scanlan, J. Polym.
Sci. 43, 501 (1960).61. L. C. Case, J. Polym. Sci. 45, 397
(1960).62. Ref. 10, p. 15.63. Ref. 40, p. 7.64. L. K. Nash,
Elements of Classical and Statistical Thermodynamics,
Addison-Wesley,
Reading, Mass., 1970.65. Ref. 6, p. 399.66. Ref. 13, p. 85.67.
P. G. De Gennes, Scaling Concepts in Polymer Physics, Cornell
University Press,
Ithaca, N.Y., 1979, p. 29.68. P. J. Flory, Pure Appl. Chem. 52,
241 (1980).69. G. Gee, Polymer 7, 373 (1966).70. A. V. Tobolsky, D.
W. Carlson, and N. Indictor, J. Polym. Sci. 54, 175 (1961).71. T.
L. Hill, An Introduction to Statistical Thermodynamics,
Addison-Wesley, Reading,
Mass., 1962, p. 214.72. F. A. Bovey, Chain Structure and
Conformation of Macromolecules, Academic Press,
Inc., New York, 1982, p. 185.73. F. T. Wall, J. Chem. Phys. 11,
67 (1943).74. H. Eyring, Phys. Rev. 39, 746 (1932).75. P. Debye, J.
Chem. Phys. 14, 636 (1946).76. B. H. Zimm and W. H. Stockmayer, J.
Chem. Phys. 17, 1301 (1949).77. S. Chandrasekhar, Rev. Mod. Phys.
15, 1 (1943).78. W. Kuhn, Kolloid Z. 68, 2 (1934).79. E. Guth and
H. Mark, Monatsh. Chem. 65, 93 (1934).80. M. V. Volkenshtein,
Configurational Statistics of Polymeric Chains, Wiley-
Interscience, New York, 1963.
-
Vol. 2 ELASTICITY, RUBBER-LIKE 249
81. Ref. 13, p. 90.82. Lord Rayleigh, Philos. Mag. 37, 321
(1919).83. P. J. Flory, Statistical Mechanics of Chain Molecules,
Wiley-Interscience, New York,
1969.84. M. C. Wang and E. Guth, J. Chem. Phys. 20, 1144
(1952).85. W. Kuhn and F. Grun, Kolloid Z. 101, 248 (1942).86. H.
M. James and E. Guth, J. Chem. Phys. 11, 470 (1943).87. W. Kuhn,
Kolloid Z. 76, 256 (1936).88. W. Kuhn, Kolloid Z. 87, 3 (1939).89.
R. A. Jacobson, J. Am. Chem. Soc. 54, 1513 (1932).90. W. H. Hunter
and G. H. Woollett, J. Am. Chem. Soc. 43, 135 (1921).91. J.
Brandrup and E. H. Immergut, eds., Polymer Handbook, Part IV,
Wiley-
Interscience, New York, (1975), p. 1.92. R. Ullman in J. E. Mark
and J. Lal, eds., Elastomers and Rubber Elasticity, ACS,
Washington, D.C., (1982), p. 257.93. R. Ullman, Macromolecules
15, 1395 (1982).94. H. Benoı̂t and co-workers, J. Polym. Sci.
Polym. Phys. Ed. 14, 2119 (1976).95. M. Beltzung and co-workers,
Macromolecules 15, 1594 (1982).96. M. Beltzung, J. Herz, and C.
Picot, Macromolecules 16, 580 (1983).97. S. Candau, J. Bastide, and
M. Delsanti, Adv. Polym. Sci. 44, 27 (1982).98. Ref. 52, pp. 23,
47.99. R. L. Anthony, R. H. Caston, and E. Guth, J. Phys. Chem. 46,
826 (1942).
100. K. J. Smith Jr., A. Greene, and A. Ciferri, Kolloid Z. 194,
49 (1964).101. U. Bianchi and E. Pedemonte, J. Polym. Sci. Part A
2, 5039 (1964); G. Allen, U.
Bianchi, and C. Price, Trans. Faraday Soc. Part II 59, 2493
(1963); J. Bashaw and K.J. Smith Jr., J. Polym. Sci. Part A-2 6,
1041 (1968); Yu. K. Godovsky, Polymer 22, 75(1981).
102. P. J. Flory, Proc. R. Soc. London, Ser. A 351, 351
(1976).103. Ref. 11, p. 261.104. Ref. 6, p. 489.105. Ref. 11, p.
263.106. J. E. Mark, Rubber Chem. Technol. 46, 593 (1973).107. P.
J. Flory and J. Rehner, J. Chem. Phys. 11, 512, 521 (1943).108. F.
T. Wall, J. Chem. Phys. 10, 485 (1942).109. L. R. G. Treloar,
Trans. Faraday Soc. 39, 36, 241 (1943).110. J. E. Mark, J. Am.
Chem. Soc. 92, 7252 (1970).111. R. M. Johnson and J. E. Mark,
Macromolecules 5, 41 (1972).112. C. U. Yu and J. E. Mark,
Macromolecules 6, 751 (1973).113. L. R. G. Treloar, Trans. Faraday
Soc. 40, 59 (1944).114. S. M. Gumbrell, L. Mullins, and R. S.
Rivlin, Trans. Faraday Soc. 49, 1495 (1953).115. A. N. Gent and V.
V. Vickroy, J. Polym. Sci. Part A2 5, 47 (1967).116. A. L. Andrady,
M. A. Llorente, and J. E. Mark, J. Chem. Phys. 72, 2282 (1980).117.
L. R. G. Treloar and G. Riding Proc. R. Soc. London, Ser. A 369,
261 (1979).118. W. Kuhn and F. Grün, J. Polym. Sci. 1, 3
(1946).119. L. R. G. Treloar, Trans. Faraday Soc. 43, 277, 284
(1947).120. R. G. Morgan and L. R. G. Treloar, J. Polym. Sci. Part
A-2 10, 51 (1972).121. D. Y. Yoon and P. J. Flory, J. Chem. Phys.
61, 5366 (1974).122. P. J. Flory and V. W. C. Chang, Macromolecules
9, 33 (1976).123. J. C. Conrad and P. J. Flory, Macromolecules 9,
41 (1976).124. J. E. Mark and J. G. Curro, in R. A. Dickie and S.
S. Labana, eds., Characterization of
Highly Cross-Linked Polymers, American Chemical Society,
Washington, D.C., 1983.125. P. J. Flory, Pure Appl. Chem. Macromol.
Chem. 33(Suppl. 8), 1 (1973).
-
250 ELASTICITY, RUBBER-LIKE Vol. 2
126. P. J. Flory, Rubber Chem. Technol. 41, 641 (1968).127. F.
Harari, Graph Theory, Addison-Wesley, Reading, Mass., 1971.128. A.
Ciferri, C. A. J. Hoeve, and P. J. Flory, J. Am. Chem. Soc. 83,
1015 (1961).129. J. E. Mark and P. J. Flory, J. Am. Chem. Soc. 86,
138 (1964).130. J. E. Mark, Macromol. Rev. 11, 135 (1976).131. J.
E. Mark, J. Chem. Phys. 49, 1398 (1968).132. M. Mooney, J. Appl.
Phys. 11, 582 (1940).133. D. S. Chiu, T.-K. Su, and J. E. Mark,
Macromolecules 10, 1110 (1977).134. M. A. Llorente and J. E. Mark,
J. Chem. Phys. 71, 682 (1979).135. H. M. James and E. Guth, J.
Chem. Phys. 15, 669 (1947).136. B. E. Eichinger, Macromolecules, 5,
496 (1972).137. W. W. Graessley, Macromolecules 8, 865 (1975).138.
L. R. G. Treloar, Trans. Faraday Soc. 50, 881 (1954).139. Ref. 7,
p. 211.140. Ref. 13, p. 123.141. P. J. Blatz, S. C. Sharda, and N.
W. Tschoegl, Trans. Soc. Rheol. 18, 145 (1974).142. R. W. Ogden,
Proc. R. Soc. London, Ser. A 326, 565 (1972).143. K. Tobish,
Colloid Poly. Sci. 257, 927 (1979).144. R. S. Rivlin, Philos.
Trans. R. Soc., Ser. A 241, 379 (1948).145. P. J. Flory and Y.
Tatara, J. Polym. Sci., Polym. Phys. Ed. 13, 683 (1975).146. L.
Mullins, J. Appl. Polym. Sci. 2, 257 (1959).147. J. E. Mark, Rubber
Chem. Technol. 48, 495 (1975).148. B. Erman, W. Wagner, and P. J.
Flory, Macromolecules 13, 1554 (1980).149. W. J. Bobear, Rubber
Chem. Technol. 40, 1560 (1967).150. D. R. Brown, J. Polym. Sci.,
Polym. Phys. Ed. 20, 1659 (1982).151. R. L. Carpenter, O. Kramer,
and J. D. Ferry, Macromolecules 10, 117 (1977).152. J. D. Ferry and
H. C. Kan, Rubber Chem. Technol. 51, 731 (1978).153. L. M. Dossin
and W. W. Graessley, Macromolecules 12, 123 (1979).154. D. S.
Pearson and W. W. Graessley, Macromolecules 13, 1001 (1980).155. J.
P. Queslel and J. E. Mark, Adv. Polym. Sci. 65, 135 (1984).156.
Ref. 13, p. 126.157. G. Ronca and G. Allegra, J. Chem. Phys. 63,
4990 (1975).158. P. J. Flory, J. Chem. Phys. 66, 5720 (1977).159.
B. Erman and P. J. Flory, J. Chem. Phys. 68, 5363 (1978).160. P. J.
Flory, Polymer 20, 1317 (1979).161. P. J. Flory and B. Erman,
Macromolecules 15, 800 (1982).162. B. Erman and P. J. Flory, J.
Polym. Sci., Polym. Phys. Ed. 16, 1115 (1978).163. H. Pak and P. J.
Flory, J. Polym. Sci., Polym. Phys. Ed. 17, 1845 (1979).164. B.
Erman, J. Polym. Sci., Polym. Phys. Ed. 19, 829 (1981).165. B.
Erman and P. J. Flory, Macromolecules 15, 806 (1982).166. B. Erman,
J. Polym. Sci., Polym. Phys. Ed. 21, 893 (1983).167. L. R. G.
Treloar, Br. Polym. J. 14, 121 (1982).168. Ref. 7, p. 128.169. J.
P. Queslel and J. E. Mark, Polym. Bull. 10, 119 (1983).170. G.
Rehage, Rubber Chem. Technol. 39, 651 (1966).171. R. W. Brotzman
and B. E. Eichinger, Macromolecules 15, 531 (1982).172. R. W.
Brotzman and B. E. Eichinger, Macromolecules 16, 1131 (1983).173.
Ref. 6, pp. 495, 541.174. P. J. Flory, J. Chem. Phys. 10, 51
(1942).175. B. E. Eichinger and P. J. Flory, Trans. Faraday Soc.
64, 2035, 2053, 2061, 2066 (1968).176. P. J. Flory and H. Daoust,
J. Polym. Sci. 25, 429 (1957).177. W. R. Krigbaum and P. J. Flory,
J. Am. Chem. Soc. 75, 1775 (1953).
-
Vol. 2 ELASTICITY, RUBBER-LIKE 251
178. C. H. Baker and co-workers, Polymer 3, 215 (1962).179. B.
Erman and J. E. Mark, Structures and Properties of Rubber-like
Networks, Oxford
University Press, New York, 1997.180. J. E. Mark and B. Erman,
Rubber-like Elasticity: A Molecular Primer, Wiley-
Interscience, New York, 1988.181. J. E. Mark and B. Erman,
Elastomeric Polymer Networks, Prentice Hall, Englewoods
Cliffs, N.J., 1992.182. J. E. Mark and co-workers, Physical
Properties of Polymers, American Chemical So-
ciety, Washington, D.C., 1993.183. L. H. Sperling, Introduction
to Physical Polymer Science, 2nd ed., Wiley-Interscience,
New York, 1992.184. L. A. Woods, J. Res. Nat. Bur. Stand. Sect.
A 80, 451 (1976).185. G. C. Moore and W. F. Watson, J. Polym. Sci.
19, 237 (1956).186. B. Ellis and G. N. Welding, Rubber Chem.
Technol. 37, 571 (1964).187. B. Erman and P. J. Flory,
Macromolecules 16, 1607 (1983).188. J. P. Queslel and J. E. Mark,
Adv. Polym. Sci. 71, 229 (1985).189. J. P. Queslel, Rubber Chem.
Technol. 62, 800 (1989).190. J. P. Queslel and J. E. Mark, Rubber
Chem. Technol. 63, 46 (1990).191. J. P. Queslel and J. E. Mark, J.
Chem. Phys. 82, 3449 (1985).192. B. Erman and L. Monnerie,
Macromolecules 22, 3342 (1989).193. J. P. Queslel and J. E. Mark,
Eur. Polym. J. 22, 273 (1986).194. J. P. Queslel and L. Monnerie,
Makromol. Chem., Macromol. Symp. 30, 145 (1989).195. J. P. Queslel,
F. Fontaine, and L. Monnerie, Polymer 29, 1086 (1988).196. B. Erman
and J. E. Mark, Macromolecules 20, 2892 (1987).197. J. P. Queslel,
P. Thirion, and L. Monnerie, Polymer 27, 1869 (1986).198. L. Y. Shy
and B. E. Eichinger, Macromolecules 19, 2787 (1986).199. M. A.
Sharat, A. Kloczkowski, and J. E. Mark, Comput. Theor. Polym. Sci.
11, 251
(2001).200. J. P. Queslel and J. E. Mark, J. Chem. Educ. 64, 491
(1987).201. I. Bahar and B. Erman, Macromolecules 20, 1696
(1987).202. J. P. Queslel and J. E. Mark, Polym. J. 18, 263
(1986).203. M. A. Sharaf and co-workers, Comput. Polym. Sci. 2, 84
(1992).204. J. E. Mark and B. Erman, Comput. Polym. Sci. 5, 37
(1995).205. J. D. Ferry, Viscoelastic Properties of Polymers, 2nd
ed., John Wiley & Sons, Inc., New
York, 1970.206. W. W. Graessley and S. F. Edwards, Polymer 22,
1329 (1981).207. R. L. Carpenter, H. C. Kan, and J. D. Ferry,
Polym. Eng. Sci. 19, 266 (1979).208. W. Batsberg and O. Kramer, J.
Chem. Phys. 74, 6507 (1981).209. S. Granick and J. D. Ferry,
Macromolecules 16, 39 (1983).210. N. R. Langley, Macromolecules 1,
348 (1968).211. N. R. Langley and K. E. Polmanteer, J. Polym. Sci.,
Polym. Phys. Ed. 12, 1023 (1974).212. M. Gottlieb, J. Chem. Phys.
77, 4783 (1982).213. B. M. E. van der Hoff and E. J. Buckler, J.
Macromol. Sci. Chem. 1, 747 (1967).214. J. E. Mark, Rubber Chem.
Technol. 54, 809 (1981).215. J. E. Mark, Adv. Polym. Sci. 44, 1
(1982).216. M. Gottlieb and co-workers, Macromolecules 14, 1039
(1981).217. M. Gottlieb, C. W. Macosko, and T. C. Lepsch, J. Polym.
Sci., Polym. Phys. Ed. 19, 1603
(1981).218. C. W. Macosko and G. S. Benjamin, Pure Appl. Chem.
53, 1505 (1981).219. K. O. Meyers, M. L. Bye, and E. W. Merrill,
Macromolecules 13, 1045 (1980).220. K. A. Kirk and co-workers,
Macromolecules 15, 1123 (1982).221. E. M. Valles and C. W. Macosko,
Macromolecules 12, 673 (1979).
-
252 ELASTICITY, RUBBER-LIKE Vol. 2
222. E. M. Valles and C. W. Macosko, Rubber Chem. Technol. 49,
1232 (1976).223. D. R. Miller and C. W. Macosko, Macromolecules 9,
206 (1976).224. Y. K. Leung and B. E. Eichinger, Prepr. Div. Polym.
Mater. 48, 440 (1983).225. J. P. Queslel and J. E. Mark, J. Polym.
Sci., Polym. Phys. Ed. 22, 1201 (1984).226. W. W. Graessley and D.
S. Pearson, J. Chem. Phys. 66, 3363 (1977).227. W. W. Graessley,
Adv. Polym. Sci. 47, 67 (1982).228. R. C. Ball and co-workers,
Polymer 22, 1011 (1981).229. R. J. Gaylord, Polym. Bull. 8, 325
(1982).230. G. Marrucci, Macromolecules 14, 434 (1981).
J. P. QUESLELManufacture Michelin, CERL – GPAJ. E.
MARKUniversity of Cincinnati
![Chapter 3 Rubber Elasticity · 2019. 9. 6. · Composites [複合素材, 複合材料] dream: strength of steel with resilience of rubber goal: enhancing stiffness [modulus] and (tensile)](https://img.pdfslide.net/doc/110x75/60ee5ed6898096425f1dcc68/chapter-3-rubber-elasticity-2019-9-6-composites-ec-e.jpg)



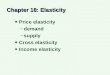






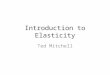


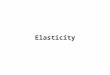
![A comparison of limited-stretch models of rubber elasticity2014/06/23 · Models of rubber elasticity Page 3 of 32 S. R. Rickaby, N. H. Scott function. Puso’s [26] model does not](https://img.pdfslide.net/doc/110x75/60c88ea8608602704c70561e/a-comparison-of-limited-stretch-models-of-rubber-elasticity-20140623-models.jpg)