Embed Size (px)
Citation preview

energies
Article
Electrical Faults Signals Restoring Based onCompressed Sensing Techniques
Milton Ruiz * and Iván Montalvo
Electrical Engineering, Universidad Politécnica Salesiana, Quito EC170146, Ecuador; [email protected]* Correspondence: [email protected]
Received: 17 March 2020; Accepted: 21 April 2020; Published: 24 April 2020�����������������
Abstract: This research focuses on restoring signals caused by power failures in transmission lines usingthe basis pursuit, matching pursuit, and orthogonal matching pursuit sensing techniques. The originalsignal corresponds to the instantaneous current and voltage values of the electrical power system.The heuristic known as brute force is used to find the quasi-optimal number of atoms k in the originalsignal. Next, we search for the minimum number of samples known as m; this value is necessary toreconstruct the original signal from sparse and random samples. Once the values of k and m havebeen identified, the signal restoration is performed by sampling sparse and random data at other busbars of the power electrical system. Basis pursuit allows recovering the original signal from 70% ofthe random samples of the same signal. The higher the number of samples, the longer the restorationtimes, approximately 12 s for recovering the entire signal. Matching pursuit allows recovering thesame percentage, but with the lowest restoration time. Finally, orthogonal matching pursuit recovers aslightly lower percentage with a higher number of samples with a significant increase in its recovery time.Therefore, for real-time electrical fault signal restoration applications, the best selection will be matchingpursuit due to the fact that it presents the lowest machine time, but requires more samples compared withorthogonal matching pursuit. Basis pursuit and orthogonal matching pursuit require fewer sparse andrandom samples despite the fact that these require a longer processing time for signal recovery. Thesetwo techniques can be used to reduce the volume of data that is stored by phasor measurement systems.
Keywords: recovering signal; compressed sensing; basis pursuit; matching pursuit; orthogonal matchingpursuit; power system
1. Introduction
The electrical Power System (PS) is one of the most complex networks in the world; it is aninterconnected grid established by generation units, substations, transmission, distribution lines, andloads. The diagnosis of failures in electrical power systems through Signal Processing (SP) is applied to thePower Quality (PQ) associated with the implementation of Smart Grid (SG) technologies. The increasingcomplexity of the electric grid requires signal processing in order to characterize, identify, and diagnosethe system behavior accurately [1,2].
The detection of an event, in electrical power systems, is the basis for carrying out numerousapplications in the safety, power quality monitoring, analysis, and control systems fields. It is important tosay that the device which is going to be on charge of detecting and evaluating the events that present anytype of disturbance or distortion in a electrical system, must be as thorough as possible when evaluatingan anomaly in the system, since a poor performance of this device can result in a false alarms on events
Energies 2020, 13, 2121; doi:10.3390/en13082121 www.mdpi.com/journal/energies

Energies 2020, 13, 2121 2 of 19
that are not important [3]. This aim most of the time is not achieved due to the fact that the processed dataare so big that the equipment is not able to react on time. As can be seen in Figure 1, currently, the processto transform analog signals to digital signals is carried out by several secondary smart digital devicesknows as Phasor Measurement Unit (PMU) that perform the task of controlling, metering, protecting,supervising, and communicating with other modules of the system. The large amount of data that isacquired by sensors installed in the different points of the electricity network consume large amounts ofenergy, which is necessary to process information as a consequence of the large volume of data traffic [4].
Figure 1. Management and control of the electrical power system.
The quality of smart devices is determined by their ability to perform Digital Signal Processing(DSP) using mathematics, algorithms, and techniques to manipulate signals [5,6]. Lets suppose that a it isintended to monitor the energy quality of our system, here there are several elements that are part in themonitoring and measurement process; however, definitively one of the most important is the device that isin charge of detecting the failures of the electrical network. This multifunctional element is available torecord real-time events that will be used for future analysis, it also can classify the elements according totheir characteristics. In the first case, if a false alarm occurs in the presence of a minor event, this could leadthat irrelevant information could saturate the memory space. On the other hand, if the device is not preciseenough, an important event could not be detected and the information would simply be lost. As a resultof these two scenarios, a new theory known as compressed sensing is applied with the aim of reducinginformation by cutting the number of samples required to reconstruct the original data. Therefore, usingthe same idea, the proposal is to minimize the amount of data required to rebuild the original signalneeded to recognize and classify a fault or non-fault detection of any device [7].
Recently, particularly high interest has been seen in signal processing, especially how to sample andcompress these signals. Because of the desire to process the signal and in particular achieve a higherquality of the acquired signal and obtain a high performance in data compression, some models have been

Energies 2020, 13, 2121 3 of 19
developed that propose that a signal considered dispersed can be efficiently represented or reconstructedfrom a small set of measurements [8]. The lower number of the sample frequency of the signal is directlyrelated to the decrease in energy consumption and especially the optimization of computational timeto process that signal. It is important to say that, due to the advantages of this methodology, it has avery wide application range, especially in devices that have low resolution or in equipment that requiresextremely high sampling frequencies.
There are several techniques that can be used for signal reconstruction, but this article will focus onthe most relevant, compressed sensing [9]. The main aim of this methodology is that any type of signalcan be represented approximated by a sparse signal; that is to say, an input signal can be characterizedby a linear combination composed of its most significant terms. Thus, it can be said that compressedsensing is a promising technology, which will contribute to the significant development of the way inwhich signal processing is currently performed, reducing computational costs and thus optimizing the useof other resources such as energy [10]. Compressed sensing is a versatile tool, which can be applied inseveral situations. For instance, one case is a small sample set that is a direct consequence of the lack ofphysical availability. A second case is a study in which the large amount of information collected does notallow the fast processing of such information, and it needs to be reduced to its most significant sampleswithout compromising all the information. In addition, a third case is that the access to the amount of datacollected is affected or prohibited by the presence of noise.
Lately, numerous studies have been developed on sparse signal reconstruction, for example a completeanalysis of a the orthogonal matching pursuit algorithm technique was presented in [11]. It is an alternativeand optimized approach initially posed by the Nyquist–Shannon theorem and based on the fact that asmall number of non-adaptive linear projections on a compressible signal contains enough informationto rebuild and process it. However, this approach was done for an audio signal. Both Chretien [12] andTropp [13] provided an extensive and comprehensive report about matching pursuit. The first one used MPto decompose a signal in a linear expansion of waveforms that were selected from a redundant dictionaryof functions, which was simply the resulting matrix after applying a transform to the input signal. In thispaper, the transform was based on the Gabor function that defines an adaptive time-frequency transform.The second one used alternative methods for the lo-norm. The difference is due to its discrete anddiscontinuous nature; this theorem does not satisfy all mathematical axioms, since it is simply not a norm.This theorem is based on the total number of nonzero elements in a vector. There are also authors whocomplement compressed sensing with probabilistic techniques, such as the Bayesian approach. It can beseen as an extension of propositional logic that allows reasoning with propositions whose truthfulness orfalseness are uncertain [14].
In contrast, this paper integrates all the basic considerations used by utilities to obtain the best optionto reconstruct a sparse signal. It is known that electricity demand is rising, and it is a priority to findnew solutions that allow reducing the maintenance and operation costs of the electrical system in a safeand reliable way. Set in this context, fault detection in an electrical system and processing the signalare extremely important in order to meet this objective. Consequently, the proposed algorithm analyzesseveral methodologies in which a fault signal can be reconstructed, from a few samples, to obtain anaccurate selection to process that signal. Additionally, the methodology suggested in this paper can beused in real-life situations and not only as a technical simulation; therefore, the reconstruction of faultsignals from a few sampled signals can be useful for academic and practical purposes [15].
2. Compressed Sensing Theory
The ability to detect an electrical signal, under fault conditions, is widely in electrical systems not onlyfor monitoring the event but also for taking preventive actions in order to protect the system. It extremely

Energies 2020, 13, 2121 4 of 19
important that the system separates the difference between a failure event and an event that does notdeserve to be considered as a fault, thus it is possible to select exclusively the events that represent a riskfor the system and discard events that present false and unimportant information . This characteristic isextremely important since a false reading of the device will lead, in many cases, in the lack of energy alongan electrical line that does not present any error at all. At the moment the device detects a fault, it will beable to classify the fault according to the parameters required and previously pre-established by the user.On the other hand, if the device is not capable of identifying a fault that may be critical to the system, theconsequences will be catastrophic not only for the system but also for the consumer, because this wouldlead to a total blackout.
Compressive sensing is an alternative technique for Shannon/Nyquist sampling [16],for reconstruction of a sparse signal x ∈ RN that can be well recovered by just M� N components froman M ∗ N basis matrix. For this, x should be sparse, that is to say it must have k different elements fromzero where k � N. This technique is used to recover a sparse-enough signal from a small number ofmeasurements [17].
Electrical fault signals have a sparse representation and could be compressed using the framework ofsensing shown in Figure 2. Signals are located in a memory spot called RN . The registers can be configuredas the signals located there do not have a significant representation within that and thus this infromationrepresentations can have its own memory space RD. An algorithm ∆a is able to create a description α
for a signal x in the dictionary D. There is also an error represented by e. However, a little quantity ofsamples is not enough to determinate the information needed by x. The sensing process y = Φx + n createinformation which can be put together in a vector y ε RM for a given signal where the existing noise at themeasurement process is n. X can be obtained from y, if we obtain the sparse representation α by using thesparse recovery algorithm ∆r. Finally, x ≈ Dα [17].
Sensing Matrix
Measu
rem
ents
Dictionary
Sig
nal
Repre
senta
tion
Sparse Recovery
Sparse Approximation
measurement noise approximation error
Figure 2. Framework of compressed sensing [17].

Energies 2020, 13, 2121 5 of 19
The following equation, which is a matrix expression, is a common definition which represent atypical generic sparse acquisition problem.
y = Φx + n (1)
where:
• y is the acquired sample vector of dimension [M × 1];• Φ is the sensing matrix of dimension [M × N];• α is the sparse signal representation of dimension [N × 1];• n is the additive noise contribution of dimension [N × 1].
To represent a signal with compressive sensing, it is necessary to obtain the dictionary matrix, D,which may be constructed by different elementary waveforms generated from a variety of basic functions,such as Short-Time Fourier Transform (STFT), Wavelet Transform (WT), Discrete Cosine Transform (DCT),Hilbert Transform (HT), Gabor Transform (GT), the Wigner Distribution Function (WDF), S-Transform (ST),Gabor–Wigner Transform (GWT), Hilbert–Haung Transform (HHT), and hybrid transform based methods.
2.1. Restricted Isometry Property
The incoherence criterion relies on the assumption that the signal x admits a k-sparse representationy in a given sparsifying domain. However, in practice, this knowledge is unavailable a priori.The aforementioned decomposition into a sensing and sparsifying matrix is no longer feasible, andthe sensing matrix Φ has to be taken into account as a whole
The best way in which the inconsistency criterion could be explained is that given a dispersiondomain, there is a signal x which admits another signal y with a k—dispersed representation. Despitethe fact that in practice this knowledge is not well developed, it is known that the information previouslydescribed can be decomposed into two matrices: a dispersion matrix and a detection matrix Φ which mustbe considered in its whole domain.
Refs. [18,19]:y = Φx = ΦDα = (ΦD)α (2)
First a signal x must be assumed which is k-sparse or k-compressible in D and k� N. The aim is toobtain x starting from another signal y considering that Φ and D are values which are already known. Theprocess explined previously can be archived by obtaining the sparse representation α from y so later wecan calculate x = Dα.
A bad scenario could be the possibility that k-column submatrices of Φ are not well conditioned, sothere is a chance that some sparse signals get mapped to very similar measurement vectors. Hence, it isnot stable to reconstruct the signal mathematically. Furthermore, if any kind of noise or disturbance ispresent during the process, the veracity of the process decreases even more [20]. The two authors Candesand Tao describe that due to the nature of a sparse signals, it must be conserved according the action of asensing matrix. Especially, you have to keep in mind that the space between two sparse signals must beregardless of any disturbances that may exist [21]. Both authors developed this criteria and represented itin the form of a matrix Φ where the the smallest number is δk for which the following holds:
(1− δk)||x||22 ≤ ||Φx||22 ≤ (1 + δk)||x||22 ∀ x : ||x||2 ≤ k (3)
When δk < 1, the Equation (3) implies that each collection of k columns from Φ is non-singular. As itis desire that every collection of 2k columns to be non-singular, the value of δ2k < 1 is needed, which is theminimum requirement for the recovery of k sparse signals.

Energies 2020, 13, 2121 6 of 19
Additionally, if δ2k � 1, it is important to notice that the sensing operator very nearly maintains the l2distance between any two k sparse signals. As a result of this, invert the sensing process stably is possible.
At this point, it is clear the fact that many randomly generated matrices have excellent RIPperformance. It is possible to show that if δ2k ≤ 0.1, then with measurements, the probability to recover xis very high.
2.2. Minimum Norm Solution
`0 norm: In the CS context, it is necessary that will be sparse. The solution presented as follow is acommun representation for the solution recovery:
x̂ = min||x||0 s.t ||Φx̂||2 ≤ N (4)
`1 norm: Assuming a matrix A which satisfy RIP criterion, highly sparse solutions can be obtainedby convex optimization. In such a way, the algorithm is commonly know as Basis Pursuit (BP): [22,23].
x̂ = minx||x||1 s.t ||Φx̂− y||2 ≤ N (5)
The problematic present can be recognise as a recovery problem which can be define as a convexoptimization. A efficient solution to this problem will be throughout linear programming techniques usinga canonical simplex method or the more recent interior point method.
`2 norm: This method is commonly known as the Least Squares (LS) solution, and it aim is tominimize the residual energy in order to ensure adjust data resulting from measurement [24].
2.3. Matching Pursuit
This is also an algorithm (Algorithm 1) which develop an sparse approximation in order to obtain the“best matching” projections of multidimensional data onto the span of an over-complete dictionary D. Thismeans that a signal f cab be represent starting from Hilbert space H approximately as the weighted sumof finitely many functions gγn (called atoms) taken from D [25].
Algorithm 1: Matching Pursuit [17].
Input: Signal: f (t), dictionary D with normalized columns giOutput: List of coefficients (an)N
n=1 and indices for corresponding atoms γ(n)Nn=1
Initialization:R1 ← f (t);n ← 1; Repeat:Find gγn ∈ D with maximum inner product |〈Rn, gγn〉|;an ← 〈Rn, gγn〉;Rn+1 ← Rn − angγn ;n ← n + 1;Until stopping condition (for example: ‖Rn‖ < threshold )return
2.4. Orthogonal Matching Pursuit
The aim of this method is to collect enough information to reconstruct a sparse vector α from theprocess of identify the vector of indices composed by i = 1, . . . , N, so that the columns φi of Θ are selectedaccurately in order to minimize the cardinality of the error ε of the signal compressed in the MDMSand theapproximation Θα̂. In OMP, the amplitude of the atoms most of the time is orthogonal to the residue, this

Energies 2020, 13, 2121 7 of 19
amplitude is named αi. Thus the found vector consist of the index α̂. The following equation explainshow to solve this problem.
min{|| : y = ∑
iεjφiαi s.t ||y−Θα̂||2 < ε and α̂ > 0 (6)
OMP is an ambitious algorithm (Algorithm 2) since it starts by determining the largest atoms of α̂;and it is also based on matching pursuit. Nevertheless, this work does not expose the characteristics ofthis algorithm since it was not implemented due to the limitations it contains regarding the increase of thenumber of iterations [20,26,27].
Algorithm 2: Orthogonal Matching Pursuit [20].Input: Measurement matrix A ε Rmxn, observed vector y ε Rm, sparsity kInitialization:S(0) ← φ, x̂(0) ← 0for i← 1 to k doRepeat : Find gγn ∈ D with maximum inner product |〈Rn, gγn〉|;an ← 〈Rn, gγn〉;Rn+1 ← Rn − angγn ;n ← n + 1;Until stopping condition (for example: ‖Rn‖ < threshold )return
2.5. Basis Pursuit
This is another algorithm (Algorithm 3) that can considered as a mathematical optimization problem,the equation which explain this method is presented below.
minx ‖x‖1 subject to y = Ax (7)
where x is an N × 1 solution vector which will be the signal, y is an M× 1 vector of observations whichrepresent the measurements, Φ is an M× N transform matrix which is usually the measurement matrix,and finally it must to be considered that M < N. This algorithm is commonly used in scenarios whereexist an underdetermined system of linear equations such as y = Φx, this equation must to be totallysatisfied, and the sparsest solution in the `1 sense is desired [28].
Algorithm 3: Basis Pursuit [28].
Input: Φ, y, k and ε = σ2 or δ
Procedure: Step1 : T̂1 = GP1(Φ, y, k)Step2 : T̂2 = GP2(Φ, y, k)Step3 : T̂3 = BP(Φ, y, ε)
Step4 : Join Support Γ = T̂1⋃
T̂2⋃
T̂3
Step5 : x̆ such that x̆Γ = Φ†Γy and x̆Γ̂c = 0
Step6 : T̂ = indices corresponding to the k largest magnitude entries in x̆Step7 : x̂, such that x̂T̂ = x̆T̂ and x̂T̂c=0Output: x and T

Energies 2020, 13, 2121 8 of 19
3. Problem Formulation
The fact that a sparse signal can be recovered, with high probability, from a small set of random linearprojections using nonlinear reconstruction algorithms, has a high level of applicability within severalengineering fields. The signal can be sparse in the time or frequency domain, and the number of randomprojections used to recover the signal, in general, is much less than the number of samples, allowingreducing the sampling frequency and thus also decreasing the analog-to-digital conversion resources,storage resources, and transmission resources. Not many works have been published on the potential ofusing this theory; however, algorithms such as matching pursuit, orthogonal matching pursuit, and basispursuit allow developing practical and implementable applications such as fault detection in a powerelectrical system.
In the new scenario of smart grids, more signal processing methods for electrical parameters arerequired to keep the network under control and operate at the desired quality of service and reliability. Forthis purpose, electrical parameters in terms of voltage, current signals considering the magnitude, phase,and waveforms are studied from a more complex point of view where the new frequency components addhigher variations that affect measurement parameters. Moreover, monitoring the all the system parametersat every location requires high performance tools for state estimation of system parameters. As a result,the estimation and further processing of electrical power system parameters become an essential feature ofpower system analysis [29].
The complexity of the electrical grid will require not only advanced signal processing that can identifyspecific parameters, but also intelligent methods that identify the behavioral patterns of the system underfault conditions. There are no previous studies or comparative analyses of how compressed sensing can beused to detect faults in electric power systems [15,25].
A dual detection problem can be analyzed by two hypotheses. The first one is related to theassumption that a fault occurs; for instance, a short circuit between two phases of the electrical powersystem. The second one is associated with the supposition that a fault event does not occur; for example, asystem is under normal operation. The statistical properties of the hypotheses are usually very complexor unknown. In order to have a better understanding of the process of the signals in either of thesesituations, techniques such a compressed sensing can be implemented. Compressed sensing is analternative technique to Nyquist–Shannon sampling, for reconstruction of a sparse signal x ∈ RN that canbe well recovered by just M� N components from an M ∗ N basis matrix. For this, x should be sparse,that is to say that it must have k different elements from zero where k � N. This technique is used torecover a sparse-enough signal from a small number of measurements.
The technical and economic aspect is also considered, since it is not possible to install measurementsensors along the entire PS; hence, using the concept of the sparse matrix, in which there will be few pointswhere the measurement equipment can be located, a sparse matrix is created from the measurementsobtained along the electrical system. In addition, using the concept of compressed sensing, it is projectedto find the points at which to locate the measurement equipment under the optimization criteria.
There are some studies on the behavior of communications networks for the transmission of dataobtained from the sensors under the Nyquist–Shannon sampling theory [27,30]. According to theinformation obtained, it has been possible to detect and classify different types of events on transmissionlines in electric power systems. First, full access to all the data that arrive at a bus bar due to a faultevent has to be assumed. Applying signal processing techniques, a dictionary is found that represents thesignal based on the orthonormal bases. The present research focuses on the establishment of the optimalsampling points of the signals under the establishment of the correct dictionary and the use of the `0 and`1 standard under the RIP restrictions and compressed sensing.

Energies 2020, 13, 2121 9 of 19
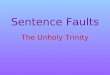
For the present study, the IEEE 39-bar model was taken as a case study. This is a model that showsthe arrangement of a transmission line, and it is widely used in the study of electrical flows and faultanalysis as well. A fault in a circuit is any event that interferes with the normal flow of current. Mosttransmission line failures are caused by lightning strikes that result in opening insulators [31]. The highvoltage between a conductor and the grounded tower that supports it causes ionization, which providesa path to the ground for an atmospheric discharge. Additionally, opening the switches, to isolate thefailed portion of the line from the rest of the system, interrupts current flow in the ionized path and allowsdeionization in the circuit [32]. Generally, in transmission line operation, a re-connection of the switchesis highly successful after a fault. In Figure 3, the red line shows the presence of a fault; this event willgenerate several post fault voltage and current signals that will be used later as the base of the signalreconstruction. In order to investigate all the possibilities, the 11 types of failures that could occur intransmission lines were simulated; as consequence, it was verified that the results obtained and validatedin a three-phase fault included the signals of the remaining 10 types of failures. The three-phase faultproduced an electromagnetic phenomena that could be evidenced in the current and voltage signals thatwere recorded by the PMU at both ends.
Swing Node
Interconnection toRest of U.S.A. / Canada
InactiveOut of CalculationDe-energized
Bus 09567.31.16-11.0
Bus 39502.51.03-10.5
Bus 01570.11.17-8.8
Bus 02565.21.16-5.7
Bus 3024.41.05-3.5
Bus 3824.01.036.9
Bus 29577.91.180.3
Bus 25573.01.17-4.3
Bus 28616.61.26-3.1
Bus 26650.81.33-6.6
Bus 03581.91.19-9.1
Bus 18595.51.22-8.8
Bus 27632.61.30-8.4
Bus 17600.21.23-7.9
Bus 16577.91.18-6.5
Bus 21560.61.15-3.6
Bus 24578.51.19-6.4
Bus 3524.51.056.8
Bus 3724.01.032.0
Bus 22543.71.112.1
Bus 23542.71.111.8
Bus 3624.81.069.3
Bus 3323.31.005.4
Bus 3423.61.014.6
Bus 19536.91.100.3
Bus 20331.41.02-0.6
Bus 15573.01.17-8.2
Bus 14563.71.16-7.8
Bus 13550.11.13-5.7
Bus 3222.90.982.5
Bus 10544.21.12-4.8
Bus 12216.91.11-5.8
Bus 11545.01.12-5.8
Bus 3122.90.980.0
Bus 06545.51.12-7.8
Bus 04559.91.15-10.0
Bus 05548.81.12-8.6
Bus 07545.81.12-10.4
Bus 08547.41.12-11.1
DIgSILENT GmbH
PowerFactory 15.1.7
39 Bus New England System
39 Bus 10 Machine New England Power System Calculation of Initial Conditions
Project: Example
Graphic: Grid
Date: 1/13/2020
Annex:
Calculation of Initial Conditions
Nodes
Line-Line Voltage Phasor, Magnitude [kV]
Voltage Phasor, Magnitude [p.u.]
Voltage Phasor, Angle [deg]
Branches
Power-Phasor, Active Power [MW]
Power Phasor, Reactive Part [Mvar]
Current Phasor, Magnitude [kA]
Line
05
- 06
-475.1231.40.786
475.8-248.70.804
Line
05
- 08
322.8-45.10.485
-321.7-29.80.482
Line
09
- 39
-8.634.30.051
10.8-675.81.098
Line
01
- 39
117.4192.90.323
-114.8-571.20.947
Line
02
- 03
349.8-284.70.651
-347.1142.20.526
Line
03
- 04
78.491.90.170
-77.9-228.40.352
Line 04 - 14
-270.3-65.90.406
271.0-11.10.393
Line
14
- 15
19.9-186.70.272
-19.8-48.40.074
Line
15
- 16
-300.2-104.60.453
301.30.7
0.426
Line
16
- 17
235.6-477.10.752
-233.6406.40.638
Line
17
- 27
21.5-438.80.598
-19.9212.00.275
Line
26
- 27
262.5103.70.354
-261.1-287.50.501
Line 17 - 18
212.132.40.292
-211.7-122.80.336
Line 25 - 26
90.6-570.20.823
-83.9243.60.323
Line
01
- 02
-117.4-192.90.323
118.0-250.70.400
Line
02
- 25
-217.814.10.315
222.3-103.90.350
Trf
02 -
30
250.0-474.017.900
-250.0521.30.835
Trf
25 -
37
540.0-506.625.207
-536.9626.91.176
Trf
29 -
38
-819.41048.91.880
830.0-841.940.301
Trf
22 -
35
650.0-251.523.241
-650.0314.61.084
Trf
23 -
36
-558.5246.70.919
560.0-164.819.206
Trf
19 -
33
-628.8285.81.050
632.0-221.723.501
Trf
20 -
34
-505.733.11.249
508.012.3
17.565
Trf
19 -
20
122.5140.50.284
-122.3-136.10.451
Trf
10 -
32
-650.0350.51.108
650.0-250.124.789
Trf
13 -
12
-6.7-57.20.217
6.758.40.087
Trf
11 -
12
-0.8-30.80.116
0.931.10.047
Trf
06 -
31
-556.1300.80.946
556.1-209.321.172
Line
07
- 08
192.1-97.20.322
-191.953.00.297
Line
08
- 09
-8.4-199.10.297
8.6-34.30.051
Load 15
320.0153.00.505
Load 24
308.6-92.20.455
Load 16
329.032.30.467
Load 21
274.0115.00.433
Load 20
628.0103.01.568
Load 12
7.588.00.332
Load 31
9.24.6
0.367
Load 08
522.0176.00.822
Load 07
233.884.00.372
Load 39
1104.0250.01.839
Load 04
500.0184.00.777
Load 03
322.02.4
0.452
Load 18
158.030.00.221
Load 25
224.047.20.326
Load 26
139.017.00.176
Load 27
281.075.50.376
Load 28
206.027.60.275
Load 29
283.526.90.402
SG~
G 07
560.0-164.819.206
SG~G 09
830.0-841.940.301
SG~
G 06
650.0-251.523.241
SG~
G 05
508.012.3
17.565
SG~
G 04
632.0-221.723.501
SG~
G 03
650.0-250.124.789
SG~
G 02
565.3-204.721.423
SG~
G 01
1000.0-997.02.294
SG~G 08
540.0-506.625.207
SG~G 10
250.0-474.017.900
Line
03
- 18
-53.3-236.60.340
53.792.80.147
Line 21 - 22
-603.0183.90.918
607.5-272.81.000
Load 23
247.584.60.393
Line
22
- 23
42.5-41.80.090
-42.5-67.10.119
Line
23
- 24
353.5-264.30.664
-349.099.80.512
Line 28 - 29
-343.1405.20.703
348.5-531.90.898
Line 26 - 29
-182.2-187.70.328
187.3-543.90.813
Line 26 - 28
-135.4-176.60.279
137.1-432.80.601
Line
16
- 24
-40.4-37.60.078
40.4-7.6
0.058
Line
16
- 21
-327.4157.00.513
329.0-298.90.647
Line
16
- 19
-498.1324.80.840
506.3-426.31.007
Line
13
- 14
292.6-288.20.610
-290.9197.80.510
Line
10
- 13
300.1-265.70.601
-299.3229.80.560
Line
10
- 11
349.9-84.80.540
-349.248.00.528
Line
06
- 11
-347.28.4
0.520
348.3-79.10.535
Line
06
- 07
427.4-60.50.646
-425.913.20.638
Line
04
- 05
-151.8110.40.274
152.3-186.30.358
DIgSILENT
Electrical fault
Figure 3. Electrical fault in the power system IEEE 39-bar.
4. Analysis and Results
In Figure 4, top left corner, the three-phase current signals in Bus 4 are shown, presenting that thereis a phase and magnitude disturbance. The frequency spectrum that is the result of the electrical fault isshown in Figure 4, top center. In this figure, the frequency with greater amplitude is the fundamental one of60 Hz; however, new frequency components have been included due to the electrical failure. In Figure 4d,the voltage signal presents phase disturbances and a magnitude decrease. The frequency spectrum that isthe result of electrical fault is shown in Part e. In this figure, also the frequency with greater amplitudeis the fundamental one of 60 Hz; however, new frequency components have been included due to the

Energies 2020, 13, 2121 10 of 19
electrical failure. In Part f, the discrete cosine transform is shown. It can be seen that the energy of thesignal is concentrated in a few data, allowing us to create a sparse matrix.
0.48 0.5 0.52 0.54Time ( ms )
-4
-3
-2
-1
0
1
2
3
4
Curre
nt Am
plitud
e ( pu
)
Phase RPhase SPhase T
0
0.5
1
1.5
2
2.5
3
3.5
Curre
nt Am
plitud
e ( pu
)
0 100 200 300 400 500Current Frequency ( Hz )
Phase RPhase SPhase T
0.48 0.5 0.52 0.54Time ( ms )
-1.5
-1
-0.5
0
0.5
1
1.5
Volta
ge Am
plitud
e ( pu
)
Phase RPhase SPhase T
0
0.5
1
1.5
2
2.5
Volta
ge Am
plitud
e ( pu
)
0 100 200 300 400 500
Phase RPhase SPhase T
-20
-15
-10
-5
0
5
10
15
20
25
Ampli
tude
0 50 100Current DCT Index
Phase RPhase SPhase T
-15
-10
-5
0
5
10
15
Ampli
tude
0 50 100Voltage DCT Index
Phase RPhase SPhase T
a b c
d e f
Voltage Frequency ( Hz )
Figure 4. (a) Time signals of current at bus 4, (b) frequency spectrum of current at bus 4, (c) DCT index ofcurrent at bus 4, (d) Time signals of voltage at bus 4, (e) frequency spectrum of voltage at bus 4, (f) DCTindex of voltage at bus 4.
4.1. Matching Pursuit Results
To solve the problem of signal restoration using the matching pursuit model, first, it is necessary toestablish the number of atoms in the signal known as k. The atoms of the signal are the minimum numberof samples that represent the entire signal. Figure 5 shows the optimal number k signal atoms of the signalunder fault conditions; thus, the number of random samples needed by the atoms is 171 for a fault signalwith no noise. As can be seen, the execution time of the algorithm to find the optimal value of k is lessthan 0.2 s.
Second, the number of samples needed to reconstruct the signal will be calculated. Figure 6 shows thenumber of samples needed to reconstruct 90% of the signal as a function of the original one. The scenariowith the highest number is Part a. It requires 391 random samples of the original signal, which is equivalentto 80% of the original signal data, and the machine time required to process the algorithm is 0.1726 s.

Energies 2020, 13, 2121 11 of 19
0 50060
80
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
Tim
e (
s )
171 Samples99.0371 Rec. (%)0.061448 Time (s)
0 50060
80
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
Tim
e (
s )
41 Samples99.3092 Rec. (%)0.016194 Time (s)
0 50070
80
90
100
0
0.1
0.2
0.3
Tim
e (
s )
171 Samples99.6349 Rec. (%)0.073029 Time (s)
0 500Number of Samples
80
90
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
Tim
e (
s )
121 Samples99.3562 Rec. (%)0.047783 Time (s)
0 500Number of Samples
60
80
100R
ecov
ered
Sig
nal (
%)
0
0.1
0.2
0.3
Tim
e (
s )
171 Samples99.3329 Rec. (%)0.09055 Time (s)
0 500Number of Samples
60
80
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
Tim
e (
s )
71 Samples99.4419 Rec. (%)0.02566 Time (s)
Number of Samples Number of Samples Number of Samples
d e f
a b c
Figure 5. Calculation of the number of k atoms vs. processing time ((a–c) current and (d–f) voltage atbus 4).
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
0.3
Tim
e
391 Samples90.0607 Rec. (%)0.1726 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
0.3
Tim
e
361 Samples90.5541 Rec. (%)0.19586 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
0.3
Tim
e
361 Samples94.1709 Rec. (%)0.18117 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
0.3
Tim
e
381 Samples90.17 Rec. (%)0.19262 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
0.3
Tim
e
371 Samples90.8878 Rec. (%)0.21883 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.1
0.2
0.3
Tim
e
381 Samples94.0291 Rec. (%)0.18676 Time (s)
a b c
d e f
Figure 6. Number of m samples necessary to recover the original signal vs. processing time ((a–c) currentand (d–f) voltage at bus 4).

Energies 2020, 13, 2121 12 of 19
Finally, once the number of samples is calculated, the optimal values in order to reconstruct thesignals can be obtained. For this case, k = 171, which corresponds to 35% of the base signal, and m = 391,corresponding to 80% of the same one. Next, the reconstruction tests of the signals produced by theelectrical failures are developed at Bar 14.
Figure 7 shows the reconstruction of the signal at a different point in the system based on 50% to 100%random samples; thus, the value of k will be 171. It is important to mention that the reconstructed signalswere obtained from 80% of the whole information, where orange signals eliminate the noise that occurswhen the samples are spread. The machine time to execute this algorithm in order to find the optimalvalue k was lower than 0.2 s.
a b c
d e f
Figure 7. Signal reconstruction using k and m values vs. processing time ((a–c) current and (d–f) voltage atbus 14).
4.2. Orthogonal Matching Pursuit Results
To solve the problem of signal restoration using the orthogonal matching pursuit model, it is necessaryto establish the number of atoms of the signal known as k. The atoms of the signal are the samples of thesignal that represent the entire signal. Figure 8 shows the optimal number k “atoms” of the fault signal. Itis shown that the number of random samples needed by the atoms was 431 (Part d) for a signal underfault conditions without noise. The machine time of the algorithm was less than 1.71 s.
Figure 9 shows the number of samples needed to reconstruct 90% of the signal with respect to theoriginal one. The scenario with the highest number required 341 random samples of the original signal(Parts a and e); however, Part e requires a lower time for the solution of the algorithm, which was 0.182 s.

Energies 2020, 13, 2121 13 of 19
0 500Number of Samples
20
40
60
80
100
Rec
over
ed S
igna
l (%
)
0
0.5
1
1.5
2
Tim
e (
s )
261 Samples
99.0272 Recovered (%)
0.36806 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.5
1
1.5
Tim
e (
s )
101 Samples
99.098 Recovered (%)
0.085507 Time (s)
0 500Number of Samples
20
40
60
80
100
Rec
over
ed S
igna
l (%
)
0
0.5
1
1.5
2
Tim
e (
s )
71 Samples
99.5692 Recovered (%)
0.029008 Time (s)
0 500Number of Samples
60
70
80
90
100
Rec
over
ed S
igna
l (%
)
0
1
2
3
Tim
e (
s )
431 Samples
99.2573 Recovered (%)
2.2184 Time (s)
0 500Number of Samples
20
40
60
80
100R
ecov
ered
Sig
nal (
%)
0
1
2
3
Tim
e (
s )
41 Samples
97.7782 Recovered (%)
0.012552 Time (s)
0 500Number of Samples
20
40
60
80
100
Rec
over
ed S
igna
l (%
)
0
0.5
1
1.5
2
Tim
e (
s )
81 Samples
98.8604 Recovered (%)
0.036846 Time (s)
a b c
d e f
Figure 8. Calculation of the number of k atoms vs. processing time ((a–c) current and (d–f) voltage atbus 4).
0 500Number of samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.5
1
1.5
2
Tim
e (m
s)
341 Samples
96.1437 Rec. (%)
1.3312 Time (s)
0 500Number of samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
1
2
3
Tim
e (m
s)
321 Samples
90.849 Rec. (%)
1.9257 Time (s)
0 500Number of samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
1
2
3
4
Tim
e (m
s)
321 Samples
92.9657 Rec. (%)
1.6913 Time (s)
0 500Number of samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
1
2
3
Tim
e (m
s)
321 Samples
90.1852 Rec. (%)
1.554 Time (s)
0 500Number of samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.5
1
1.5
2
Tim
e (m
s)
341 Samples
97.4569 Rec. (%)
1.301 Time (s)
0 500Number of samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
0.5
1
1.5
2
Tim
e (m
s)
341 Samples
97.849 Rec. (%)
1.5599 Time (s)
a b c
d e f
Figure 9. Number of m samples needed to recover the signal vs processing time ((a–c) current and (d–f)voltage at bus 4).

Energies 2020, 13, 2121 14 of 19
Figure 10 shows the reconstruction of the signal at a different point in the system based on 50% to100% of random samples; thus, the value of k will be 431, as was described previously. It is important tomention that the reconstructed signals were obtained from 60% of the whole information, where orangesignals eliminate the noise that occurs when the samples are spread.
a b c
d e f
Figure 10. Signal reconstruction using k and m values vs. processing time ((a–c) current and (d–f) voltageat bus 14).
4.3. Basis Pursuit Results
Figure 11 shows the number of samples needed to reconstruct 90% of the signal with respect to theoriginal one. The scenario with the lowest number required 441 random samples of the original signal(Part c), and the time required for the solution of the algorithm was approximately 10.71 s, which was alsothe lowest time compared to the other samples analyzed in the other subfigures of the same figure.
Figure 12 shows the reconstruction of the signal at a different point in the system based on 50% to100% of random samples; thus, the value of k will be 431. It is important to mention that the reconstructedsignals were obtained from 60% of the whole information, where orange signals eliminate the noise thatoccurs when the samples are spread.

Energies 2020, 13, 2121 15 of 19
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
8
10
12
14
16
Tim
e (s
)
451 Samples
97.3492 Rec. (%)
10.9042 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
5
10
15
Tim
e (s
)
471 Samples
98.224 Rec. (%)
11.218 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
5
10
15
Tim
e (s
)
441 Samples
98.8946 Rec. (%)
10.853 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
5
10
15
Tim
e (s
)451 Samples
97.5664 Rec. (%)
10.7129 Time (s)
0 500Number of Samples
0
50
100R
ecov
ered
Sig
nal (
%)
0
5
10
15
Tim
e (s
)
461 Samples
97.9412 Rec. (%)
11.8662 Time (s)
0 500Number of Samples
0
50
100
Rec
over
ed S
igna
l (%
)
0
5
10
15
Tim
e (s
)
461 Samples
98.2044 Rec. (%)
11.4448 Time (s)
a b c
d e f
Figure 11. Number of samples m needed to recover the signal vs. processing time ((a–c) current and (d–f)voltage at bus 4).
The Table 1 presents the summary of the different BP, MP, and OMP techniques used for signalreconstruction based on compressed sensing. The number of k and m samples necessary to reconstruct thesignals is described. The error percentage and the recovery time are detailed as well.
Table 1. Results of signal reconstruction techniques.
k Samples BP (%) MP(%) OMP(%)
Current N/A 35.4 54.1Voltage N/A 35.4 89.2
m Samples BP (%) MP (%) OMP (%)
Current 90.9 76.8 70.6Voltage 93.4 80.9 70.6
Error BP (%) MP (%) OMP (%)
Current 1.105 4.451 3.856Voltage 2.433 4.784 2.151
Time for Recovery BP (s) MP (s) OMP (s)
Current 10.853 0.182 1.331Voltage 10.712 0.191 1.559

Energies 2020, 13, 2121 16 of 19
a b c
d e f
Figure 12. Signal reconstruction using m values vs. processing time ((a–c) current and (d–f) voltage atbus 14).
5. Conclusions
1. The results obtained in the paper demonstrated that by determining the optimal points of the numberof k atoms and the number of spread samples of the signal, between 60 and 80 percent of the originalsignal could be reconstructed, taking into account that with a smaller number of random samples,the higher the signal reconstruction time.
2. It was demonstrated that real-time signal processing algorithms, such as matching pursuit, were ahelpful tool that must be implemented due to their quick response in order to find the original signalbased on spread signals obtained from sampling. Thus, this algorithm could reconstruct the signalwith a random number of samples, approximately 171, greater than 80% of the original one, and thealgorithm solution times were less than 0.2 s. This method offered the best of the three solutionsbecause it reconstructed the original signal almost entirely in a short period.
3. According to the results obtained, it was evident that the orthogonal matching pursuit solutionallowed building a signal from a smaller amount of signals, 60% of the dispersed samples. Thenumber of atoms obtained was 431, and the restoration time was almost 2 s, which was 10 timeslonger than matching pursuit. Consequently, this was not the best option due to the fact that with ahigher number of samples, only a little more than half of the desired signal was obtained.
4. It was also evident that the basis pursuit solution allowed building a signal from a smaller amount ofspread signals, but its execution time was 100 times longer than matching pursuit because it tookalmost 12 s in order to reconstruct almost 70% of the signal. The higher the number of samples, the

Energies 2020, 13, 2121 17 of 19
longer the restoration times. As a consequence, this method would not be the best option mainlybecause it had a high amount of machine time.
Author Contributions: Conceptualization, methodology, software, resources, validation, and formal analysis, M.R.;investigation, writing, original draft preparation, M.R. and I.M. All authors read and agreed to the published versionof the manuscript.
Funding: This work was supported by Universidad Politécnica Salesiana and Grupo de Investigación en RedesEléctricas Inteligentes–GIREI under the project Real-time electrical fault classification in transmission lines based onadvanced signal processing techniques.
Conflicts of Interest: The authors declare no conflict of interest.
Abbreviations
BP Basis PursuitCS Compressed Sensing TheoryDCT Discrete Cosine TransformDSP Digital Signal ProcessingGT Gabor TransformGWT Gabor–Wigner TransformHHT Hilbert-–Haung TransformHT Hilbert TransformLS Least SquaresMP Matching PursuitOMP Orthogonal Matching PursuitPMU Phasor Measurement UnitPQ Power QualityPS Power SystemsRIP Restricted Isometric PropertySG Smart GridSP Signal ProcessingST S-TransformSTFT Short-Time Fourier TransformWDF Wigner Distribution FunctionWT Wavelet Transform
References
1. Vega, T.Y.; Roig, V.F.; San Segundo, H.B. Evolution of signal processing techniques in power quality.In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, EPQU,Barcelona, Spain, 9–11 October 2007. doi:10.1109/EPQU.2007.4424200.
2. Karimi-Ghartemani, M.; Bakshai, A.; Eren, S. New generation of signal processing techniques for power systemapplications. In Proceedings of the 2007 IEEE Canada Electrical Power Conference, EPC 2007, Montreal, QC,Canada, 25–26 October 2007; pp. 256–260. doi:10.1109/EPC.2007.4520339.
3. Lambert-Torres, G.; Fonseca, E.F.; Coutinho, M.P.; Rossi, R. Intelligent alarm processing. In Proceedings ofthe 2006 International Conference on Power System Technology, POWERCON2006, Chongqing, China, 22–26October 2006. doi:10.1109/ICPST.2006.321758.
4. Shi, L.B.; Chang, N.C.; Lan, Z.; Zhao, D.P.; Zhou, H.F.; Tam, P.T.; Ni, Y.X.; Wu, F.F. Implementation ofa power system dynamic security assessment and early warning system. In Proceedings of the 2007IEEE Power Engineering Society General Meeting, PES, Tampa, FL, USA, 24–28 June 2007; pp. 1–6.doi:10.1109/PES.2007.385468.

Energies 2020, 13, 2121 18 of 19
5. Abiyev, A.N. A new digital signal processing based approach for evaluation of reactive power and energy inpower distribution systems. In Proceedings of the Innovations’07: 4th International Conference on Innovationsin Information Technology, IIT, Dubai, UAE, 18–20 November 2007; pp. 426–430. doi:10.1109/IIT.2007.4430448.
6. Al-Nujaimi, A.; Al-Muhanna, A.; Zerguine, A. Digital signal processing effect on power system overcurrentprotection relay behavior and operation time. In Proceedings of the 2017 9th IEEE-GCC Conference andExhibition, GCCCE 2017, Manama, Bahrain, 8–11 May 2017; pp. 1–5. doi:10.1109/IEEEGCC.2017.8448007.
7. Ignatova, V.; Styczynski, Z.; Granjon, P.; Bacha, S. Statistical matrix representation of time-varying electricalsignals. reconstruction and prediction applications. In Proceedings of the 2006 9th International Conferenceon Probabilistic Methods Applied to Power Systems, PMAPS, Stockholm, Sweden, 11–15 June 2006; pp. 1–6.doi:10.1109/PMAPS.2006.360328.
8. Franco-Tinoco, C.; Astro-Bohorquez, R.; Garcia-Mora, D. A Signal Reconstruction Technique for Power DeliveryAnalysis. In Proceedings of the 2019 IEEE 10th Latin American Symposium on Circuits and Systems, LASCAS2019, Armenia, Colombia, 24–27 February 2019; pp. 209–212. doi:10.1109/LASCAS.2019.8667556.
9. Zhang, Q.; Chen, Y.; Chen, Y.; Chi, L.; Wu, Y. A cognitive signals reconstruction algorithm based on compressedsensing. In Proceedings of the 2015 IEEE 5th Asia-Pacific Conference on Synthetic Aperture Radar, APSAR 2015,Singapore, 1–4 September 2015; pp. 724–727. doi:10.1109/APSAR.2015.7306308.
10. Yan, B.; Lijun, T.; Yunxing, G.; Yanwen, H. Load modeling based on power quality monitoring system appliedcompressed sensing. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo,Asia-Pacific, ITEC Asia-Pacific 2017, Harbin, China, 7–10 August 2017. doi:10.1109/ITEC-AP.2017.8081028.
11. Sun, H.; Ni, L. Compressed sensing data reconstruction using adaptive generalized orthogonal matchingpursuit algorithm. In Proceedings of the 2013 3rd International Conference on Computer Science and NetworkTechnology, ICCSNT 2013, Dalian, China, 12–13 October 2013; pp. 1102–1106. doi:10.1109/ICCSNT.2013.6967295.
12. Chrétien, S. An alternating `1 approach to the compressed sensing problem. IEEE Signal Process. Lett. 2010,17, 181–184. doi:10.1109/LSP.2009.2034554.
13. Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEETrans. Inf. Theory 2007, 53, 4655–4666.
14. Chen, K.; Li, Z.; Cheng, J.; Zhou, Z.; Lu, H. A variational Bayesian approach to remote sensing image changedetection. Int. Geosci. Remote Sens. Symp. (IGARSS) 2009, 3, III-204–III-207. doi:10.1109/IGARSS.2009.5417881.
15. Rozenberg, I.; Levron, Y. Applications of compressed sensing and sparse representations for stateestimation in power systems. In Proceedings of the 2015 IEEE International Conference on Microwaves,Communications, Antennas and Electronic Systems, COMCAS 2015, Tel Aviv, Israel, 2–4 November 2015.doi:10.1109/COMCAS.2015.7360397.
16. Guo, L.P.; Kok, C.W.; So, H.C.; Tam, W.S. Two-band signal reconstruction from periodic nonuniformsamples. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna,Spain, 2–6 September 2019; pp. 1–5. doi:10.23919/EUSIPCO.2019.8902554.
17. Kumar, S. Illustrated Compressed Sensing. Creative Commons Attribution 3.0 Unported License. Delhi, India.2014. p. 1. Available online: http://indigits.com/assets/research/notes_compressed_sensing.pdf (accessed on21 April 2020).
18. Mo, Q.; Shen, Y. A remark on the restricted isometry property in orthogonal matching pursuit. IEEE Trans. Inf.Theory 2012, 58, 3654–3656. doi:10.1109/TIT.2012.2185923.
19. Song, C.B.; Xia, S.T. Sparse signal recovery by `q minimization under restricted isometry property. IEEE SignalProcess. Lett. 2014, 21, 1154–1158. doi:10.1109/LSP.2014.2323238.
20. Sahoo, S.K.; Makur, A. Signal recovery from random measurements via extended orthogonal matching pursuit.IEEE Trans. Signal Process. 2015, 63, 2572–2581.
21. Candes, E.J.; Tao, T. Near-optimal signal recovery from random projections: Universal encoding strategies? IEEETrans. Inf. Theory 2006, 52, 5406–5425. doi:10.1109/TIT.2006.885507.
22. Donoho, D.L. For most large underdetermined systems of linear equations the minimal `1-norm solution is alsothe sparsest solution. Commun. Pure Appl. Math. 2006, 59, 797–829. doi:10.1002/cpa.20132.

Energies 2020, 13, 2121 19 of 19
23. Narayanan, S.; Sahoo, S.K.; Makur, A. Greedy pursuits based gradual weighting strategy for weighted`1-Minimization. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and SignalProcessing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 4664–4668. doi:10.1109/ICASSP.2018.8462645.
24. Narayanan, S.; Sahoo, S.K.; Makur, A. PT US CR. Signal Process. 2017. doi:10.1016/j.sigpro.2017.08.007.25. Carta, D.; Pegoraro, P.A.; Sulis, S. Impact of Measurement Accuracy on Fault Detection Obtained with
Compressive Sensing. In Proceedings of the 2018 IEEE 9th International Workshop on Applied Measurementsfor Power Systems (AMPS), Bologna, Italy, 26–28 September 2018; pp. 1–5. doi:10.1109/AMPS.2018.8494846.
26. Wang, J.; Kwon, S.; Li, P.; Shim, B. Recovery of sparse signals via generalized orthogonal matching pursuit: Anew analysis. IEEE Trans. Signal Process. 2016, 64, 1076–1089. doi:10.1109/TSP.2015.2498132.
27. Li, H.; Ma, Y.; Fu, Y. An improve d RIP-base d performance guarantee for sparse signal recovery via simultaneousorthogonal matching pursuit. Signal Process. 2018, 144, 29–35. doi:10.1016/j.sigpro.2017.09.027.
28. Narayanan, S.; Sahoo, S.K.; Makur, A. Greedy pursuits assisted basis pursuit for compressive sensing.In Proceedings of the 23rd European Signal Processing Conference, EUSIPCO 2015, Nice, France, 31 August–4September 2015. doi:10.1109/EUSIPCO.2015.7362472.
29. Zhao, J.; Gómez-Expósito, A.; Netto, M.; Mili, L.; Abur, A.; Terzija, V.; Kamwa, I.; Pal, B.; Singh, A.K.; Qi, J.; et al.Power System Dynamic State Estimation: Motivations, Definitions, Methodologies, and Future Work. IEEETrans. Power Syst. 2019, 34, 3188–3198. doi:10.1109/TPWRS.2019.2894769.
30. Odejide, O.O.; Akujuobi, C.M.; Annamalai, A.; Fudge, G. Joint design of channel-source coding for compressivesampling systems. In Proceedings of the 2010 7th IEEE Consumer Communications and Networking Conference,CCNC 2010, Las Vegas, NV, USA, 9–12 January 2010. doi:10.1109/CCNC.2010.5421672.
31. Zhang, Y.; Zhang, J.; Ma, J.; Wang, Z. Fault diagnosis based on BFS in electric power system. In Proceedings ofthe 2009 International Conference on Measuring Technology and Mechatronics Automation, ICMTMA 2009,Zhangjiajie, Hunan, China, 11–12 April 2009; Volume 1, pp. 643–646. doi:10.1109/ICMTMA.2009.410.
32. He, S.; Yang, D.; Li, W.; Xia, Y.; Tang, Y. Detection and fault diagnosis of power transmission linein infrared image. In Proceedings of the 2015 IEEE International Conference on Cyber Technology inAutomation, Control and Intelligent Systems, IEEE-CYBER 2015, Shenyang, China, 8–12 June 2015; pp. 431–435.doi:10.1109/CYBER.2015.7287976.
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access articledistributed under the terms and conditions of the Creative Commons Attribution (CC BY)license (http://creativecommons.org/licenses/by/4.0/).