Embed Size (px)
Citation preview

Translation of the original instructions
IO-Link® is a registered trademark of its respective trademark holder in certaincountries.
1 About this document1.1 Applicable documents
All available documents for the product è www.festo.com/pk.
Type Product Contents
EMCS-ST Integrated drive Description, commissioning
ELGC-BS Spindle axis Instruction manual, mounting
EAMM-A Axial kit Instruction manual, mounting
NEFC-M12G8-0.3-M12G5-LK Adapter Instruction manual, mounting
Tab. 1 Other applicable documents for the product
2 Safety2.1 Safety instructions– Observe labelling on the product.– Before working on the product, switch off the power supply and secure it
against being switched on again.– Store the product in a cool, dry, UV-protected and corrosion-protected envir-
onment. Ensure that storage times are kept to a minimum.– Observe tightening torques. Unless otherwise specified, the tolerance
is ± 20 %.2.2 Intended useThe spindle axis unit ELGS-BS is designed for linear movement of payloads or as adrive when external guides are used.The spindle axis unit ELGS-BS is approved for slide operation.
Fig. 1 Slide mode
2.3 Training of qualified personnelInstallation, commissioning, maintenance and disassembly should only be con-ducted by qualified personnel.The personnel must be familiar with the installation of mechatronic control sys-tems.
3 Additional information– Accessories è www.festo.com/catalogue– Spare parts è www.festo.com/spareparts.
4 ServiceContact your regional Festo contact person if you have technical questionsè www.festo.com.
5 Product overview5.1 Scope of deliveryThe following components are included in the scope of delivery:– Spindle axis unit ELGS-BS– Instruction manual for the spindle axis unit ELGS-BS– Adapter for IO-Link operation (optional accessory)è www.festo.com/catalogue
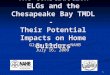
5.2 System overview
1 PELV fixed power supply forpower voltage
2 PELV fixed power supply for logicvoltage
3 Application software
4 PC or Laptop
5 Controller or IO-Link master
6 Spindle axis unit ELGS-BS
Fig. 2 System overview
The positions 1 … 5 are not in scope of delivery.
5.2.1 Product design
1 Spindle axis ELGC-BS
2 Axial kit EAMM
3 Product labelling
4 Integrated drive EMCS-ST
5 Controller housing
6 Warning symbol"Attention! Hot surface"
Fig. 3 Product design
Electrical connections, display and operating components (HMI)
1 LED display Menu(Speed Out, ..., Demo)
2 LED parameter display
3 LED display C/Q
4 Power voltage connection [power]
5 Logic voltage and digital I/O orIO-Link [Logic] connection
6 Pushbutton actuator (right arrow)
7 Pushbutton actuator (Edit)
8 Pushbutton actuator (left arrow)
Fig. 4 Electrical connections, display and operating components (HMI)
6 Transport
NOTICE!
Unexpected and unbraked movement of components• Secure moving components for transport.
1. Take product weight into account è 13 Technical data.2. Maintain support clearance £ 300 mm when attaching transportation aids.
7 Assembly
WARNING!
Risk of injury due to unexpected movement of components.The drive can move freely in the voltage-free state. This can cause unexpectedmovements of the connected mechanics and crush parts of the body.• Bring moving parts of the mechanical system into a safe position.
Mounting product è spindle axis ELGC-BS-KF, instruction manual, mounting.
8096899
ELGS-BS-KFSpindle axis unit
80968992019-07[8096901]
Instructions | Product overview
Festo SE & Co. KG Ruiter Straße 82 73734 Esslingen Germany+49 711 347-0
www.festo.com

8 Installation
WARNING!
Risk of injury due to electric shock.• For the electrical power supply with extra-low voltages, use only SELV circuits
that ensure a reliable separation from the mains network.• Observe IEC 60204-1/EN 60204-1.
1. Connect the cables to the [Logic] and [Power] connections of the integrateddrive EMCS-ST. Do not connect pin 3 at the [Power] terminal to high or lowpotential.
2. Connect cables to the controller or IO-Linkmaster and to the PELV fixed powersupply units.
Wiring diagram: DIO operation (digital I/O)– Reset (optional)
1 PELV fixed power supply unit forpower supply 24 V DC
2 Reset button for acknowledging anerror and triggering a restart(optional)
3 PELV fixed power supply for logicvoltage supply 24 V DC
4 Higher-level open-loop control(controller) with digital I/O
5 EMCS-ST
Fig. 5 Wiring diagram: DIO operation (digital I/O)
Wiring diagram: IO-Link operation
1 PELV fixed power supply unit forpower supply 24 V DC
2 IO-Link master with IO-Link inter-face
3 EMCS-ST
Fig. 6 Wiring diagram: IO-Link operation
Wiring diagram: IO-Link operation with adapter NEFC
1 PELV fixed power supply unit forpower supply 24 V DC
2 Adapter NEFC
3 IO-Link master with IO-Link inter-face
4 EMCS-ST
Fig. 7 Wiring diagram: IO-Link operation with adapter
Core colours of Festo cables:BK = black, BN = brown, BU = blue, GN = green, GY = grey, PK = pink,WH = white, YE = yellow
9 Commissioning
WARNING!
Risk of injury due to unexpected movement of components.• Protect the positioning range from unwanted intervention.• Keep foreign objects out of the positioning range.• Perform commissioning with low dynamic response.
WARNING!
Severe, irreversible injuries from accidental movements of the connected actu-ator technology.Unintentional movements of the connected actuator technology can result fromexchanging the connecting cables of a servo drive or between servo drives.• Before commissioning: All cables must be correctly assigned and connected.
WARNING!
Danger of burns from hot housing surfaces.Metallic housing parts can reach high temperatures during operation.Contact with metal housing parts can cause burn injuries.• Do not touch metallic housing parts.• After the power supply is switched off, let the device cool down to room tem-
perature.
• A new homing is only necessary if the reference end position Ref or the usefulrange is changed.
• When homing, the Start Press Position PosStart Press is equated with the newend position LimOut.
9.1 Commissioning "DIO operation (digital I/O)".Preparation1. Check the mounting of the drive system.2. Check wiring of power supplies [Power], [Logic] and digital I/O (DIO) [Logic].Processing1. Switch on power voltage.2. Switch on logic voltage.3. Wait for initialisation until LED "C/Q" lights yellow.4. Parameterise (optional): Velocities (Speed In/Speed Out), Force/Torque
(Force), Reference End Position Ref (Reference) or Start Press Position PosStart
Press (Start Press).è 10.3 Display and operating components (HMI)è Tab. 3 Parameterise and control homingè Tab. 4 Parameterise and control end-to-end operation
The drive system is ready for operation and can be controlled via the DIO controlinterface (digital I/O). With the first motion task and after each restart, the posi-tion of the reference end position "Ref" is re-initialized (drive first moves to thereference end position "Ref" before the actual motion task is executed), LED"C/Q" lights green.
9.2 Commissioning "IO-Link OperationPreparation1. Check the assembly of the drive unit.2. Check the wiring of the power supplies [Power] and the IO-Link interface
[Logic].3. Install the application software.4. Open IODD file in the application software è www.festo.com/sp.Processing1. Switch on power voltage.2. Switch on logic voltage via IO-Link master.3. Wait for initialisation until LED "C/Q" lights yellow.4. Establish IO-Link connection with the drive system.5. Parameterise (optional):
Reference end position Ref (Reference), Velocities (Speed In/Speed Out),Force, Start Press Position PosStart Press (Position Start Press) or End posi-tion LimOut (End Position Out)è Tab. 3 Parameterise and control homingè Tab. 4 Parameterise and control end-to-end operation
The drive system is ready for operation and can be controlled via the IO-Link inter-face. With the first motion task and after each restart, the position of the refer-ence end position "Ref" is re-initialized (drive first moves to the reference endposition "Ref" independently of the motion task before the actual motion task isexecuted), LED "C/Q" flashes green.

10 Operation
WARNING!
Danger of burns from hot housing surfaces.Metallic housing parts can reach high temperatures during operation.Contact with metal housing parts can cause burn injuries.• Do not touch metallic housing parts.• After the power supply is switched off, let the device cool down to room tem-
perature.
10.1 Master control– Lowest priority: DIO operation (after Power ON and initialisation)– Medium priority: IO-Link operation (after established IO-Link communication)– Highest priority: HMI operation (unlocked pushbuttons)10.2 Measuring reference systemThe correct positioning of the drive requires a defined measuring reference sys-tem.
Linear drive system
– Ref: reference end position (reference point for LimIn, LimOut, PosAct and PosStart Press)– motor facing (default)– facing away from the engine
– LimIn/LimOut: end positions– MechIn/MechOut: mechanical stops– PosAct: current position– PosStart Press: Start Press Position
Tab. 2 Dimension reference system for linear drive systems
10.3 Display and operating components (HMI)The display and operating components (HMI) can be used to perform the follow-ing functions in the HMI menu:– Unlock pushbutton actuators (Unlock HMI), 3 s press
(Condition for IO-Link operation: IO-Link parameter 0x000C.4 = false)– Select menu function with pushbutton actuators (selecting menu),
press– Parameterise setpoint values Speed Out, Speed In and Force
(Set value: 10, 20, ..., 100% of maximum value è 13 Technical data) andsave (Save), press
– Parameterise the position of the reference end position Ref (Set Ref) and runthe homing movement MovRef (StartRef: PosAct è LimIn è LimOut), press
– Start Press Run (Start/Stop) and Start Press Position Pos SaveStart Press, press.
– Execute Demo Run (Start/Stop)– Lock pushbuttons (Lock HMI), 3 s press or 15 s no pushbutton entry
Fig. 8 HMI menu
10.4 HomingDuring homing, the positions of the mechanical stops MechIn/ MechOut aredetermined in order to calculate the end positions LimIn (Ref)/LimOut for thedimension reference system.Before the homing run is carried out, the drive is de-energised for a required reini-tialisation. Then the power supply is restored and the homing process starts.
WARNING!
Risk of injury due to unexpected movement of components.When starting the homing run, the drive is disconnected from the power supplyfor a short time. This can cause unexpected movements of the connected mechan-ics and crush parts of the body.• Bring moving parts of the connected mechanical system into a safe position.
• A new homing is only necessary if the reference end position Ref or the usefulrange is changed.
• When homing, the Start Press Position PosStart Press is equated with the newend position LimOut.
Homing
Parameterise reference end position "Ref"
HMI:– Menu, Reference è 10.3 Display and operating components (HMI)IO-Link (acyclic device data):– motor facing (default): 0x0103.0, Reference = false– away from motor: 0x0103.0, Reference = true
Control homing
HMI:– StartRef:
Menu, Referenceè 10.3 Display and operating components(HMI)
IO-Link (acyclic device data):– StartRef:
0x0104.0, Execute MovRef = true
Tab. 3 Parameterise and control homing

10.5 End-to-end operationIn end-to-end operation with or without press function, the unit can be movedbetween the end positions LimIn/ LimOut.
Each time the logic voltage is switched on, the position of the reference end posi-tion Ref is re-initialised with speed Ref with the first motion task. When moving tothe LimOut end position, the LimOut end position is approached at the Speed Outvelocity.
End-to-end operation
Parameterise end-to-end operation
HMI:– Speed Out, Speed In, Force and Start Press è 10.3 Display and operating components (HMI)IO-Link (acyclic device data):– Velocity Speed Out: 0x0101.0, Speed Out1)
– Velocity Speed In: 0x0100.0, Speed In1)
– Force/Torque: 0x0102.0, Force1)2)
– Start Press Position PosStart Press: 0x0105.0, Position Start Press [mm]2)3)4)
– End position LimOut: 0x0106.0, end position Out [mm]4)
Control end-to-end operation
DIO: IO-Link (cyclic process data):
Single end-to-end operation End-to-end operation with press function
1) 10, 20, ..., 100% of maximum value2) Only required for end-to-end operation with press function3) Reset4) with each reference point "Reference end position Ref"
Tab. 4 Parameterise and control end-to-end operation
11 MalfunctionsDiagnostic messages "Warnings and Errors" are displayed via the LED displaysC/Q, menu and parameters.In DIO mode, errors are reported to the controller via the sensor signal combina-tion "1–1".Errors can be reset as follows:– DIO mode è Reset of logic voltage– IO-Link è operation Parameter "Quit Error" (0x0029.3 or 0x0107.0)
The first error that occurred is always displayed.
Fig. 9 Display of diagnostic messages (example)
Errorcode
Description LED displays Eventcode
hex(dec)
C/Q Menu Parameter (IO-Link)
Warning
z WarningsDetailed informationè Description of integ-rated drive EMCS-ST lights up
yellow
z z 0x...
Error
z Common device errorè Contact Festo
… 0x1000
0x000F(15)
I2t monitoring outputstage error
0x1805
0x0016(22)
Logic voltage undersup-ply1)
0x1804
0x0017(23)
Logic voltage oversupply 0x1803
0x0026(38)
Load voltage undersup-ply or not connected
0x1802
0x0027(39)
Load voltage oversupply 0x1801
0x0031(49)
Device undertemperat-ure
0x0033(51)
Device overtemperature
0x4000
0x012F(303)
IO-Link connection lost
lights upred
z
1) This error can only be acknowledged by a restart.
Tab. 5 Diagnostic messages "Warnings and Errors"
11.1 RepairSend the product to the Festo repair service for repair.
12 DisposalDispose of the product and packaging at the end of its useful life through environ-mentally friendly recycling in accordance with applicable regulations.
13 Technical data
Size 25 45 60
Mounting position Any
Ambient temperature [°C] 0 … +50
Storage temperature –20 … +60
Degree of protection IP40
CE markingè Declaration of Conformity
In accordance with EU EMC DirectiveIn accordance with EU RoHS
Max. payload
– horizontal mountingposition
[kg] 2 10 20
– vertical mounting posi-tion
[kg] 2 5 13
Max. velocity1) [mm/s] 180 250
Velocity "Speed Press" [mm/s] 10
Max. feed force2)3) [N] 40 100 200
Acceleration/deceleration [m/s2] 5
Observe duty cycle4) [%] 100 – 2/K (from 30 °C)
Distance stop/end position 5) [mm] 1
Repetition accuracy [mm] ±0.015 ±0.015 ±0.01
1) Maximum value for Speed In/Speed Out at level 102) Maximum value for force at level 103) The force is controlled and evaluated by regulating the motor current. Depending on the mechanism of the
drive, a linear force can be determined from the level of current measured. The target is set as a percent-age of the rated motor current and may deviate from the actual force on the axis. In the case of low forcelevels, the influence of friction in the system on the running behaviour and the actual force on the axismust also be taken into account.
4) derating5) Distance (MechIn –LimIn or MechOut –LimOut)
Tab. 6 Technical data ELGS-BS-KF