Embed Size (px)
Citation preview
Research ArticleEnergy-Efficient Enhancement for the Prediction-BasedScheduling Algorithm for the Improvement of NetworkLifetime in WSNs
Md. Khaja Mohiddin ,1 Rashi Kohli ,2 V. B. S. Srilatha Indira Dutt ,3 Priyanka Dixit ,4
and Gregus Michal 5
1Department of ET&T, Bhilai Institute of Technology, Raipur, Chhattisgarh, India2Senior Member (IEEE), New York, USA3Department of ECE, GITAM (Deemed to Be University), Visakhapatnam, India4Department of CSE, UIT, RGPV Bhopal, Madhya Pradesh, India5Department of Info. Systems, Faculty of Management, Comenius University, Bratislava, Slovakia
Correspondence should be addressed to Md. Khaja Mohiddin; [email protected], Rashi Kohli; [email protected],and Gregus Michal; [email protected]
Received 6 July 2021; Accepted 15 September 2021; Published 31 October 2021
Academic Editor: Rajesh Kaluri
Copyright © 2021 Md. Khaja Mohiddin et al. This is an open access article distributed under the Creative Commons AttributionLicense, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work isproperly cited.
In wireless sensor networks, due to the restricted battery capabilities of sensor nodes, the energy issue plays a critical role innetwork efficiency and lifespan. In our work, an upgraded long short-term memory is executed by the base station tofrequently predict the forecast positions of the node with the help of load-adaptive beaconing scheduling algorithm. In recentyears, new technologies for wireless charging have offered a feasible technique in overcoming the WSN energy dilemma.Researchers are deploying rechargeable wireless sensor networks that introduce high-capacity smartphone chargers for sensornodes for charging. Nearly all R-WSN research has focused on charging static nodes with relativistic routes or mobile nodes.In this work, it is analysed how to charge nondeterministic mobility nodes in this work. In this scenario, a new mechanism isrecommended, called predicting-based scheduling algorithm, to implement charging activities. In the suggested technique, itdirects them to pursue the mobile charger and recharge the sensor, which is unique for the present work. The mobile chargerwill then choose a suitable node, utilizing a scheduling algorithm, as the charging object. A tracking algorithm based on theKalman filter is preferred during energy transfer to determine the distance needed for charging between the destination node& mobile charger. Here, the collecting & processing of data are performed through the big data collection in WSNs. The R-WSN charging operations of nondeterministic mobility nodes will be accomplished using the proposed charging strategy.
1. Introduction
WSN is a well-organized environment consisting of a largenumber of microactive nodes spread dynamically acrossthe monitoring area through wireless broadcasting. Withits significant importance in the analysis of armed forces,heath support, inventory control, atmospheric tracking, hor-ticulture & effective promotional fields, WSNs have beenfound out to be the most significant computer research &
communication technology. Sensor nodes rely on the supplyof battery power, their broadcast functionality, and very lim-ited energy storage capacity, so the need to synchronize theenergy usage of the network along with the improvementof network lifetime came into being to use the vitality ofthe nodes more precisely.
The sensor framework comprises of multiple nodes, onlya small number of which have various functions like detect-ing, transmission, and networking, which are spread around
HindawiWireless Communications and Mobile ComputingVolume 2021, Article ID 9601078, 12 pageshttps://doi.org/10.1155/2021/9601078
the nodes within or very close to the sensor. This is whereeach of the above-listed nodes gathers the data and routesit back to either a sink or base station (BS). At present,WSN is the most widely used current networking solutionsto provide sensed retrieved information to the base stationwith insufficient power capacity. Care needs to be taken inorder to check all potential climate conditions (includingthe abovementioned ones), as well as temperature, moisture,lightning scenario, pressure, soil composition, vehiculardevelopment, noise densities, target field imaging in militaryareas, emergency management, fire alarm sensors, criminal,and surveillance hunting are all important in WSNenvironments.
The WSN consists of one or perhaps many BS’s & sev-eral sensor nodes that are positioned in a wide area for coop-erative monitoring of a physical environment. The WSN hasdifferent application scenarios such as ecological surveying,smart city, and wildlife surveillance because of its character-istics of low cost & strong self-organization. The capacity ofnode batteries also limits the operating duration of nodes,affecting WSN lifespan and efficiency, which has become acritical issue limiting WSN’s growth [1–4].
For data collecting, there is an increasing trend towardlarge-scale sensor networks. Despite the fact that they are anew generation of sensor networks, their application is con-strained by a number of factors, including adaptability toconventional network scaling methods. To allow a networkto effectively play its role, a number of significant difficultiesmust be overcome. It might cite the appropriate placementof sinks, as well as the reduction of sensor energy consump-tion and lifetime, as examples of these issues. Large-scaleWSNs (LS-WSNs) may give valuable solutions for big datacollecting in a big data setting, with a massive volume ofhigh-speed, regularly changing, and changeable data [5].
WSN has done a lot of research and analysis on how toovercome the energy dilemma in recent decades. Most ofthe previous study can be classified into three techniques:energy saving systems, energy harvesting techniques, andapproaches to wireless charging. Only energy efficiency canbe enhanced by energy saving systems, without making upfor node energy consumption. Therefore, the energy savingsystems in WSN can only mitigate the energy crisis in thesensor environment by considering various approaches andalgorithms to minimize the utilization of the energy con-sumption [6–8].
The performance of energy converters varies substan-tially according to environmental conditions. Wirelesspower transmission has been shown in investigations overthe last two decades, allowing sensor nodes to be rechargedwirelessly. Magnetic resonance coupling has gotten a lot ofattention from researchers because of its high transmissionpower and lengthy transmission distance. Wireless powertransfer is accomplished by developing a sophisticated net-work architecture in which sensor nodes are wirelesslycharged utilizing chargers with large batteries, such as (R-WSN) [9].
The majority of R-WSN investigators are interested inscheduling algorithms based on a mobile charger (MC),which configure the energizing sequence of stable sensors.
Some latest researches have looked into the R-WSN usingmobile sensor nodes. A tree-based method for chargingmission-critical robots that decreases the MC’s path lengthwithout causing robot energy depletion is suggested [10].The complexity of the location of the static loading pilehas been studied so that mobile sensing nodes can comecloser when energy is exhausted [11]. Sensor node projec-tions are stochastic, so that node activities can be monitored,according to these investigations. Wildlife tracking is a well-known scenario, in which sensor nodes are connected toeach tracked species [5]. As a consequence, nodal mobilityis uncontrollable & nonstochastic, even though the net-work’s model of mobility is the goal.
In this scenario, an appropriate strategy is to identify afew static spots in the domain region that are known as hubsthat are routinely contacted by sensors and then position themobile charger to stay and load sensors at these hubs usingan RL-based process. Although hotspots are never changedonce they have been selected, this technique is unable toadapt to changes in nodal movement patterns. Furthermore,in this method, the BS directs the MC to approach the hubs,implying that the MC must stay for a minimum duration ineach hub, even though all of the sensors that may connectdirectly have been charged [12].
Here, it investigates, how nonrandom mobility nodescan be energized. It also assists the MC in seeking the sensorimmediately in any charging activity, rather than dependingon sensors at fixed positions as in [12], so that it mayrespond to potential changes in nodal trajectories. It mustfirst tackle the three concerns in order to have chargeablefunctionality in this case listed as follows:
1.1. Node Finding Issue (NFI). The MC must first locatenodes before charging them. The MC does not know thepresent position of the individual sensor due to its nondeter-ministic mobility of sensors. Furthermore, due to R-WSN’sconstrained resources, it is unable to use the framework forcellular networks throughout cloud environments in our
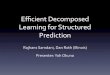
BSNode with sufficient energyAnchor nodeWCECharging tourRouting path
B
C
D
A
Figure 1: Network model.
2 Wireless Communications and Mobile Computing
study. If data packets are interacting and the MC inter-changes to the indicated positions, sensor nodes can departthe sites, causing efficiency to deteriorate in a short span oftime. The lack of knowledge on the positions of nodes isthe most significant problem in our case. It needs to figureout how to find out where nodes will be in the future so thatthe MC can reach & charge them [13].
1.2. Node Election Issue (NEI). Following the acquisition ofsensor node positions, the MC must choose a suitable sourceto charge within the constraints of battery available power.The NEI problem is similar to the static WRSN schedulingproblem. In this situation, however, the MC only charges eachnode at a row for NEI, but in static R-WSN, the BS directs theMC to connect a cluster of nodes at once. Once the presentcharge target is fulfilled, theMC initiates an unique charge task.
1.3. Node Protection Issue (NPI). It is well known that twobasic criteria for wireless power transmitting are that the
MC and target node must be relatively close together andthe transmission must be able to continue for a period oftime. In order to fulfil these two conditions, the MC mustaccompany the target node while it’s being energeticallystimulated. In spite of the nondeterministic mobility of thenodes and position, the positions of the nodes can bechanged; however, it’s impossible to know from where thenodes are. To find a moving node, the MC must track it.
With nondeterministic versatility, there exists a multitudeof problems. In themethod proposed by the NFI, it is suggestedthat a predictivemethod is used to forecast potential node posi-tions. However, in the method prescribed by NEI, it evaluatescharges depending on predicted results. During the energytransmission, the MC must also follow the destination node.For this reason, charging nondeterministic nodes must be doneon an assumption that they will switch unpredictably.
A wireless sensor network (WSN) is an ad hoc networkmade up of a series of sensor nodes that are arbitrarily fixed
Working
Initial
Receive all statuses of nodes
Run TPAsend to MC(prediction result)
Receive REQ from node i
Send to MC (REQ)
MC return for charging
Recharge MC
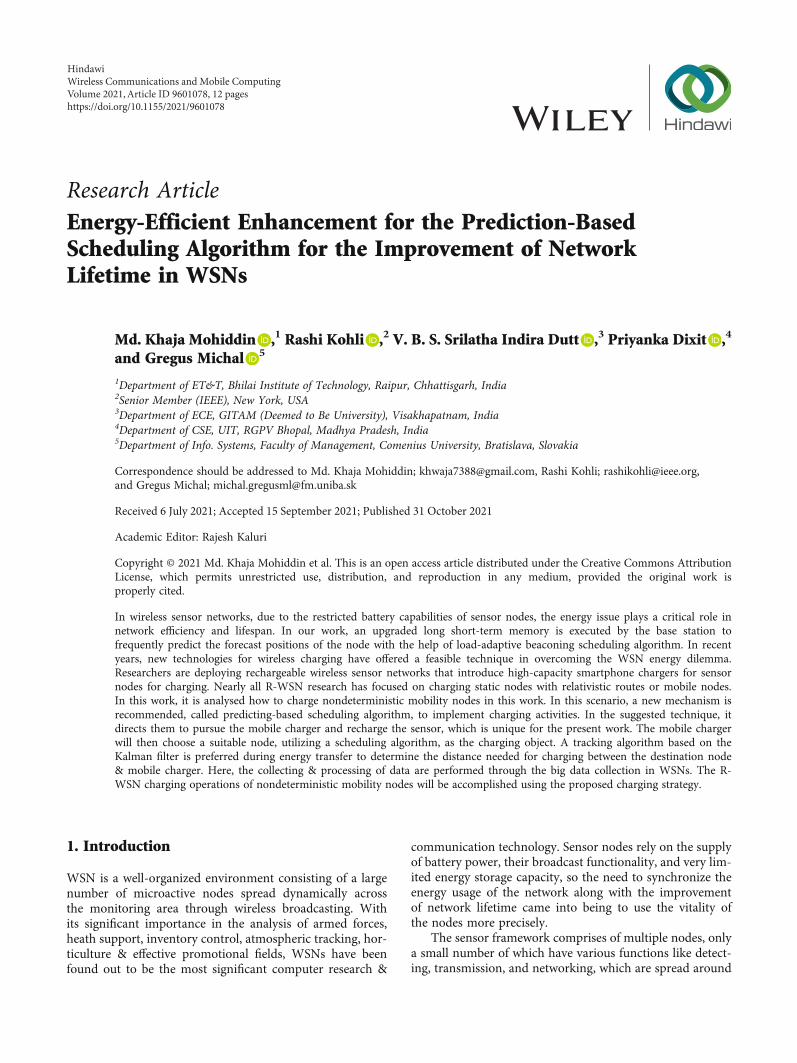
Figure 3: FSM for base station.
Working Charing
DeadRun out of energy Run out of energy^ ^
Charging finished||charging interrupt^
Time outStart timer (∆)send toMC (location)
Time outStart timer (∆)send toBS (status)
Receive beaconfrom MC^
Energy fallbelow thresholdsend to BS (REQ)
Initial
Figure 2: FSM for sensor nodes.
3Wireless Communications and Mobile Computing
or scattered in a specific geographical area and communicateover a wireless link to gather, evaluate, and transfer data intheir area to a special node called a sink. The region refersto the geographical area in which the sensor nodes function.Sensor nodes in a WSN can self-organize to gather dataabout the environment in which they are installed. Basedon the nature of the installed application, the collected datamight be transmitted on a regular basis or on an as-neededbasis. The sink is a node with two or more network inter-faces that connect the WSN to the end-network, user’s (forexample, a local area network or the Internet). The usercan use the sink to request access to other nodes in the net-work, such as specifying the type of data to be collected. Thefundamental architecture of a WSN is shown in Figure 1 forexample purposes [5].
Here, it suggests a charging scheme called predicting-based scheduling algorithm (PSA) based on the above study,
which includes three algorithms to solve the current researchchallenges. This is the first time that a chase technique hasbeen deployed to energize nodes with nonrandom mobility,to our knowledge. To be more precise, the following are themajor factors that may affect our work:
(1) The issues of energizing nodes with nonrandommobility have been resolved and are now coordinated
(2) It first offers a new LSTM methodology for evaluat-ing the precise positions of sensor nodes, which usesthe prior trajectory to forecast the forthcoming posi-tions of each sensor node
(3) In order to maximize the network’s efficiency, it offersa node identification method for selecting the optimalnode as the destination node based on the forecastingfindings and the energy level of each node
1stAlgorithm: -Choosing the most similar segmenti TY ← TX & Φt ←0ii Calculates the tiniest region RGNX which includes all the positions in TXiii for every node nY ∈ N – {nX} doiv for (t0 = 0; t0 < t – J +1, t0 = t0 + Δ t) dov if lY(t0) in RGNX thenvi Calculates the tiniest region which includes all the positions in Tt0
Y starting with lY(t0) of length Jvii if RGNX = RGNt0
Y thenviii Estimate the Spearman’s Coefficient Φspearman of TX & Tt0
Yix if Φspearman > Φt thenx TY ← Tt0
Y and Φt ← Φspearman
xi end ifxii end ifxiii end ifxiv end forxv end forxvi Result: TY and Φt
Algorithm 1: Trajectory prediction algorithm.
Scheduling
Tracking and
charging
Waiting for ACK
Travelling
Recharging from BS
Receive information from BSUpdate buffer
Receive information from BSUpdate buffer
Receive information from BSUpdate buffer
Receive information from BSUpdate buffer
Need chargingReturn to BS for recharging
Charging finished
Energy is enough for next charging taskRun MSA
Receive ACK from target nodeRun TTA
^
target node dead
^
Target node dead
^
Arrive target locationSend beacons
ACK time out
^Charging finished|| charging interrupt^
Initial
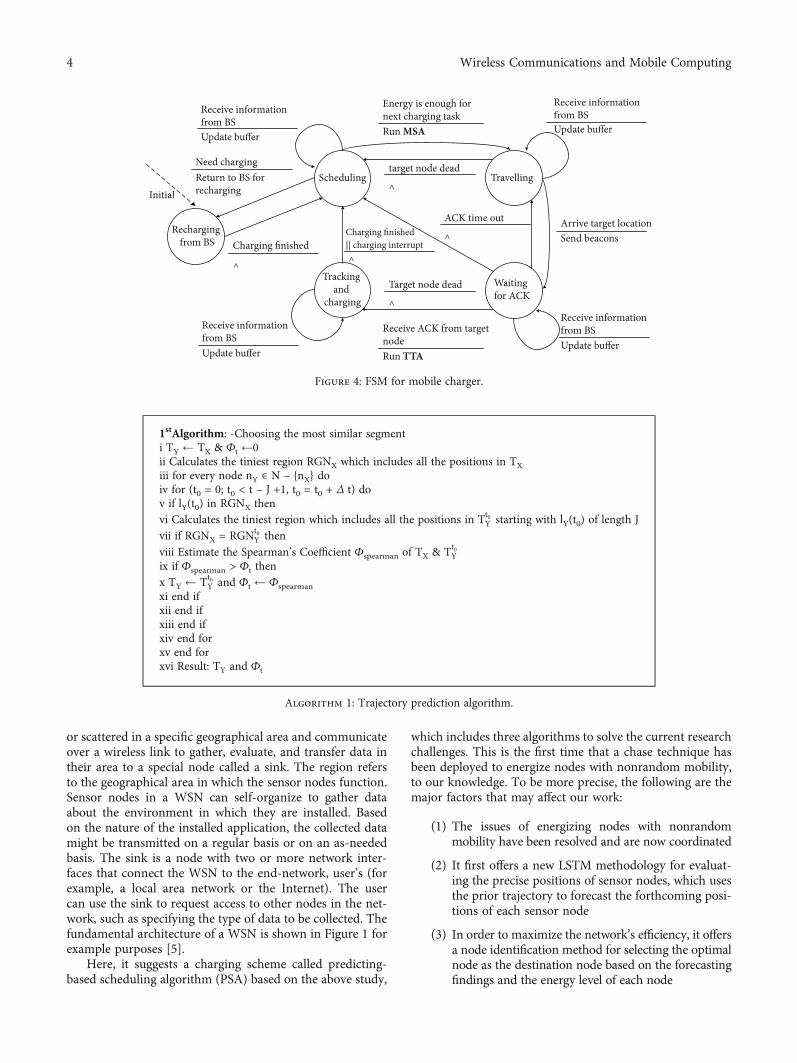
Figure 4: FSM for mobile charger.
4 Wireless Communications and Mobile Computing
(4) Ultimately, in order to fulfil the demands of wirelesscharging, it implements a Kalman filter-based track-ing technique that directs the MC to monitor mobiletarget nodes during energy conversion
2. Related Work
Current charging schemes can be divided into two groupsbased on sensor nodes’ motion states in R-WSN: static sen-sor nodes and mobile sensor nodes.
During the last ten years, investigators have suggested anumber of charging techniques for R-WSN stable sensornodes to determine the best node sequence for rechargingMCs. A periodic system was proposed, for example, in cir-cumstances where sensor nodes are distributed evenly ornonevenly [14]. The MC determines the minimum roundroute that connects all of the sensor nodes, then regulatesthe routes & energizes the sensor node with the most energy.
The charging problem was developed as a vehicle routingproblem in [15], with the minimum Hamiltonian cycle asthe solution, taking into account the placement and conditionof sensor nodes. Another key study proposes amethodology ofdistributing many MCs to sustain performance levels of R-WSN of life-critical sensor nodes [16]. It is also proposed anovel idea called “shuttling,” as well as an optimal chargingmechanism that used charger collaboration to reduce thenumber of chargers and increase the sensing range [17].
In following work on the optimization of load features andreduction of the transmission range of MC [18], a mechanismwas presented to load several sensor nodes sequentiallyentirely inside the same transmission range. This strategyenhances the charging effectiveness and device effectivenessof WRSNs compared to standard techniques. Research in thispaper compares the chargeability of unique-frequency loaderswith diverse-frequency loaders when determining the positionof wireless chargers that simultaneously load a distinct WSN
Pool
ing
Dec
oder
Auto
enco
der
Auto
enco
der
Sim
ilar s
egm
ent
Shor
t-tim
e seg
men
t….. ….. ….. …..
LSTM LSTM LSTM LSTM
LSTM LSTM LSTM LSTM
LSTM LSTM LSTM LSTM
….. ….. ….. …..
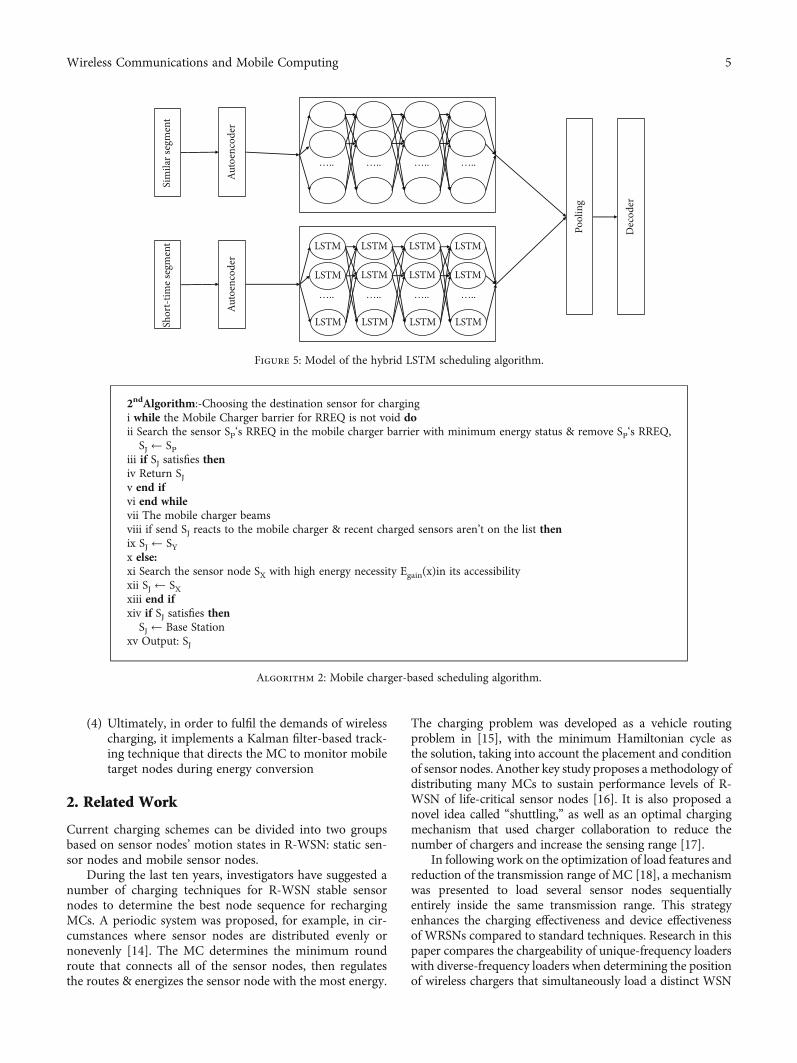
Figure 5: Model of the hybrid LSTM scheduling algorithm.
2ndAlgorithm:-Choosing the destination sensor for chargingi while the Mobile Charger barrier for RREQ is not void doii Search the sensor SP‘s RREQ in the mobile charger barrier with minimum energy status & remove SP‘s RREQ,
SJ ← SPiii if SJ satisfies theniv Return SJv end ifvi end whilevii The mobile charger beamsviii if send SJ reacts to the mobile charger & recent charged sensors aren’t on the list thenix SJ ← SYx else:xi Search the sensor node SX with high energy necessity Egain(x)in its accessibilityxii SJ ← SXxiii end ifxiv if SJ satisfies then
SJ ← Base Stationxv Output: SJ
Algorithm 2: Mobile charger-based scheduling algorithm.
5Wireless Communications and Mobile Computing
[19]. This paper provides a smooth logic-based approach thatis suggested for on-demand charging in a dense R-WSN [20].They have used a foggy logical method to develop an ideal on-demand charging package for a dense R-WSN, taking accountof the available energy, range to theMC, and key node density.According to the previous study [20, 22], many MCs wereestablished for on-demandWRSNs by load-balanced networkdividing and dynamic recharge limitations were determinedfor sensor nodes.
In this, most previous research concluded that sensor nodetrajectories are random. For illustration, a way for regulatingthe operating power of the stable charging stack for chargingsensor nodes is identified [21, 22]. The researchers proposeda way of assigning the static recharge batteries to mobile nodeswith essential power, while flexible nodes take over therecharge node duties effectively [11]. Research in this papersubmits a tree-based operating robotic charge plan that placestheMC on a path of depleted sensor nodes with zero reductionof robot energy to keep R-WSN operating properly [10. 24].
This paper suggests a primary study to have an overview ofthe usage of an energy-restricted MC to charge nonrandommobile sensors [12]. The objective of this survey was to iden-tify certain fixed spots in which sensors are often located andthen to deploy the MC to stay and load at these spots.Although, in order to find these positions, this method neces-sitates a significant amount of historical trajectory data and isunable to adjust to changes in the nodal mobility model.
3. Methodologies
So far, in order to energize nodes with a nondeterministicbehaviour, three concerns have been explored and formu-lated. It proposes our accounting strategy in this chapter,which will be utilized to solve three problems at a time.Three algorithms are included in the proposed charge tech-nique for addressing these problems: the trajectory predic-tion algorithm, the MC-based scheduling algorithm &
target tracking algorithm (TTA). Each time, the BS performsTPA to estimate possible sensor placements and providesthe forecasting results to the MC in the required manner.The BS information is buffered in the MC. Using the pro-tected data to estimate the next loading destination or directto the BS, MC conducts MSA during the departure or the
No
No Yes
Yes
No
No
Yes
Yes
Retrieve stage Start
Association
Full function device
?
NEIGHBOR_SCAN
MLME_NBLIST
Build neighbor table
Find empty slot
Continue with beacon transmission
Slot available
?
Continue as end device
A�er T second
Find empty slot
Allocate new slotto the node
Num of route > num
of slot ??
Isslot
available?
Slot available
?
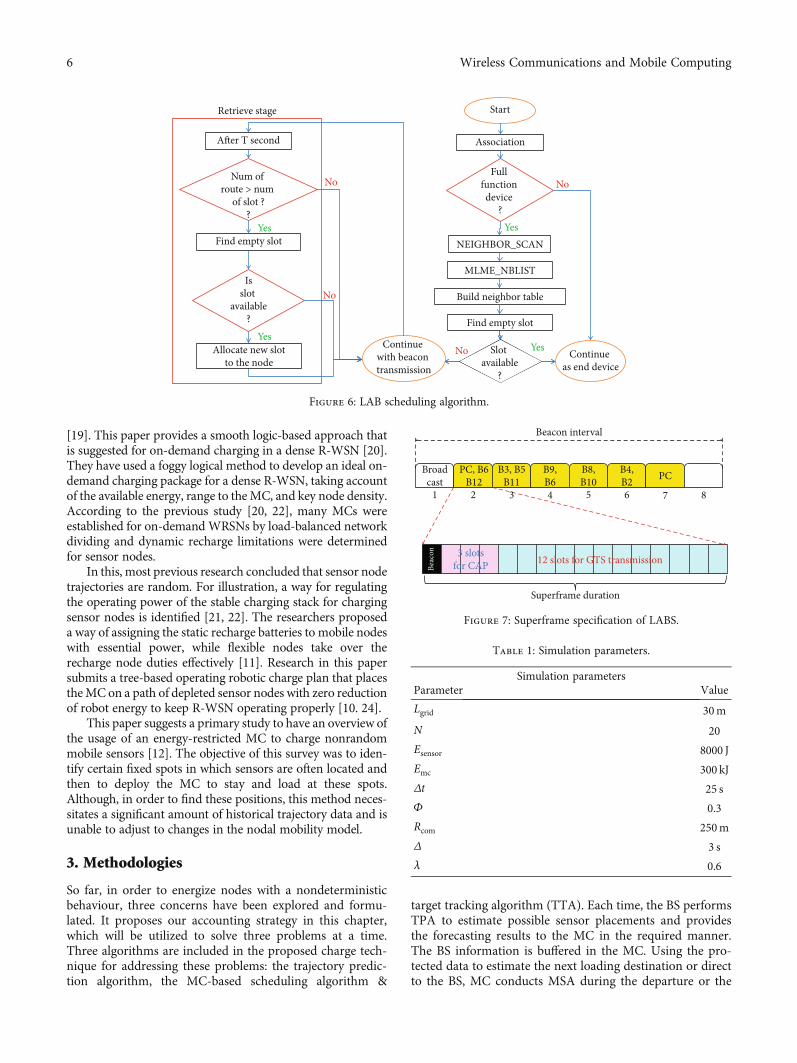
Figure 6: LAB scheduling algorithm.
Broadcast
PC, B6B12
B3, B5B11
B9,B6
B8,B10
B4,B2 PC
Beacon interval
12 slots for GTS transmission3 slotsfor CAPBe
acon
Superframe duration
1 2 76543 8
Figure 7: Superframe specification of LABS.
Table 1: Simulation parameters.
Simulation parametersParameter Value
Lgrid 30m
N 20
Esensor 8000 J
Emc 300 kJ
Δt 25 s
Φ 0.3
Rcom 250m
Δ 3 s
λ 0.6
6 Wireless Communications and Mobile Computing
completion of a charging task. The MC advances to the fore-casting position of the destination node once the destinationnode is located. When the MC reaches the target node, theTTA is used for tracking it during energy transfer.
Figures 2–4 display the FSM concepts for the BS, MC,and sensor nodes, respectively, to better explain how thedeveloped system operates. The FSM in Figure 2 depicts sen-sor node operations, whereas the FSMs in Figures 3 and 4depict BS and MC operations, individually. The axes in theFSM specifications represent the conversions of the systemsfrom one phase to the next. The event that activates theswitch is indicated above the straight axis that denotes thetransition, while the actions conducted during the eventare indicated under the straight axis.
3.1. Trajectory Prediction Algorithm (TPA). To deal withNDP, it is needed to develop a node trajectory time sequenceforecasting approach. There are several time series predictionexperiments available today, such as exponential smoothing(ES), moving average (MA) & autoregressive integrated mov-ing average model (ARIMA). Unfortunately, due to the diffi-culty of node mobility, these methods might not work wellin our case. As a consequence, it turns to neural network tech-niques and the algorithm is shown in Algorithm 1.
3.2. Hybrid LSTM Predicting Algorithm. The LSTM tech-nique is used in TPA because of its integral gain in analyzingsequence data and predicting [24–26]. Calculating an inte-grated mobility prototype for the entire sensor nodes wouldbe exceedingly time consuming because individual nodeshave distinct movement patterns. It is currently attemptingto determine the mobility prototype for each sensor nodeindividually. Because all sensor nodes are part of the samesensor network, they must have some spatial and temporalconsistency. The forecasting model’s convergence will beaccelerated if this type of regularity is applied.
The neural framework primarily consists of an LSTMblock that extracts mobility patterns from short sections
and a highly interconnected block that differs substantiallyregarding future moves from the furthermost identical seg-ment [27–30]. The LSTM block is made up of an autoenco-der layer & 4 LSTM layers, each with 32 LSTM cells, whilethe completely integrated block is made up of an autoenco-der layer & four highly integrated layers, each with 32 neu-rons as shown in Figure 5. The performance from theLSTM and completely connected blocks is mixed in the cor-rect ratio using a pooling layer. A decoder layer predicts theperformance of the pooling layer.
3.3. Mobile Charger-Based Scheduling Algorithm (MSA). Asthe NEI is a top-down multiobjective recursive challengewith the first goal of reducing the percentage of dead nodes,MSA seeks to decrease the count of dead nodes initially andthen the charging transit time. As a result, the node electionmethod looks like this:
First, MSA examines the RREQ messages it has issued,since REQX indicates that SX is experiencing an energy alert.In the buffered REQX, the MC selects the SX sensor with theleast power [31]. This will then be monitored by the mobilecharger. The SX sensor is loaded by the MC when the limit isreached. Otherwise, in buffered messages, the MC selects theRREQ node with minimum energy as shown in Algorithm 2.
When no appropriate node is chosen based on RREQinformation, MSA attempts to choose the destination nodefor the lowest requested journey distance. MC casts beaconsto check for neighbouring sensor nodes and selects the basicstation with minimum remaining energy between those whoreact on MC. A list is being used to record the sensors pow-ered by the MC currently, in order to prevent charging thesensors around frequently. As a result, the messages fromthese awaiting sensor nodes will be ignored by the MC.
3.4. Target Tracking Algorithm (TTA). The MC will interactwith the destination node for current movement informa-tion until it is associated with the target node [32]. TheMC must guide the target node throughout the entire energy
0
20
40
60
80
100
120
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Accu
racy
(%)
ID of the sensor node
Accuracy of the trajectory prediction
PSA_LABSPSA_TPA
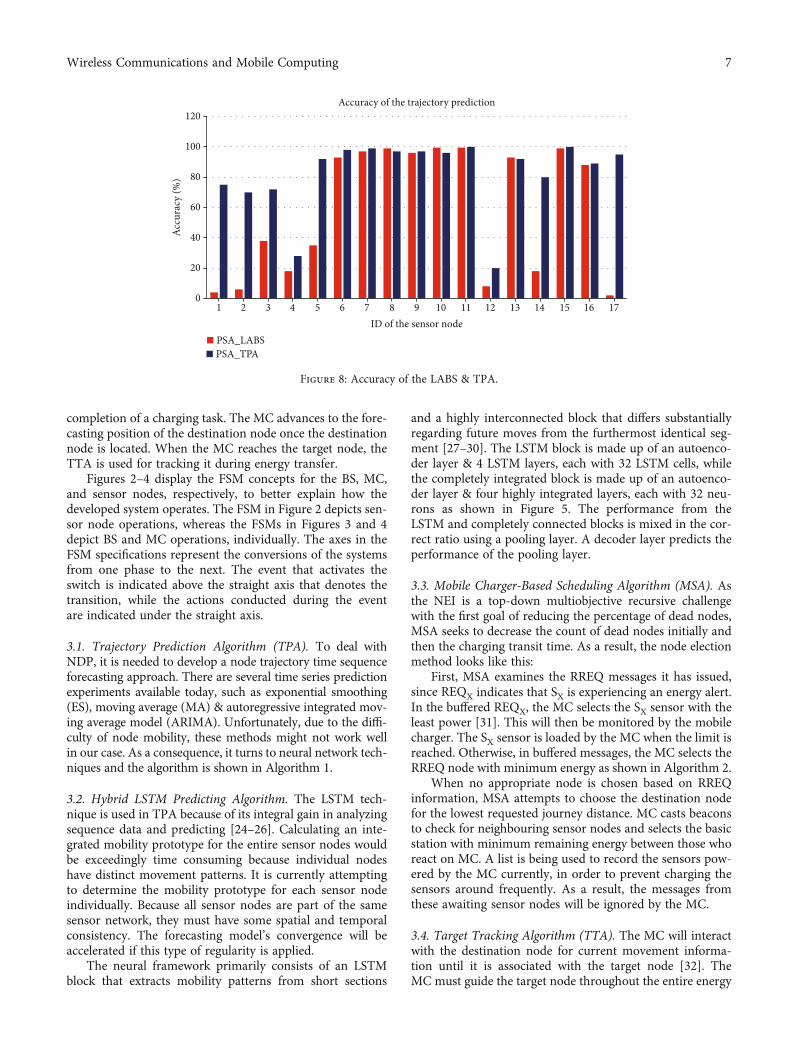
Figure 8: Accuracy of the LABS & TPA.
7Wireless Communications and Mobile Computing
transfer process in order to complete the mission. This goalis recommended to be accomplished using the target track-ing algorithm.
Since the prediction phase “Δ” is tiny, it typically con-siders the target node’s mobility to be a linear trace. TheGaussian noise can be approximated when it comes to GPSposition error. To predict the position of the target node,the Kalman filter is used, which has excellent short-time pre-diction efficiency.
3.5. LAB Scheduling Algorithm (LABS). This algorithm isimportant for mesh topology and preventing beacon colli-sions. There are two sections of this algorithm as shown inFigure 6. Initially, the nodes will be connected with oneanother, after which the neighbouring nodes will be exam-ined to determine the energy information required forproper scheduling. The retrieval stage follows, in which the
time slot is mapped to a variety of routes between the sourceand sink nodes as shown in Figure 7.
4. Results and Discussion
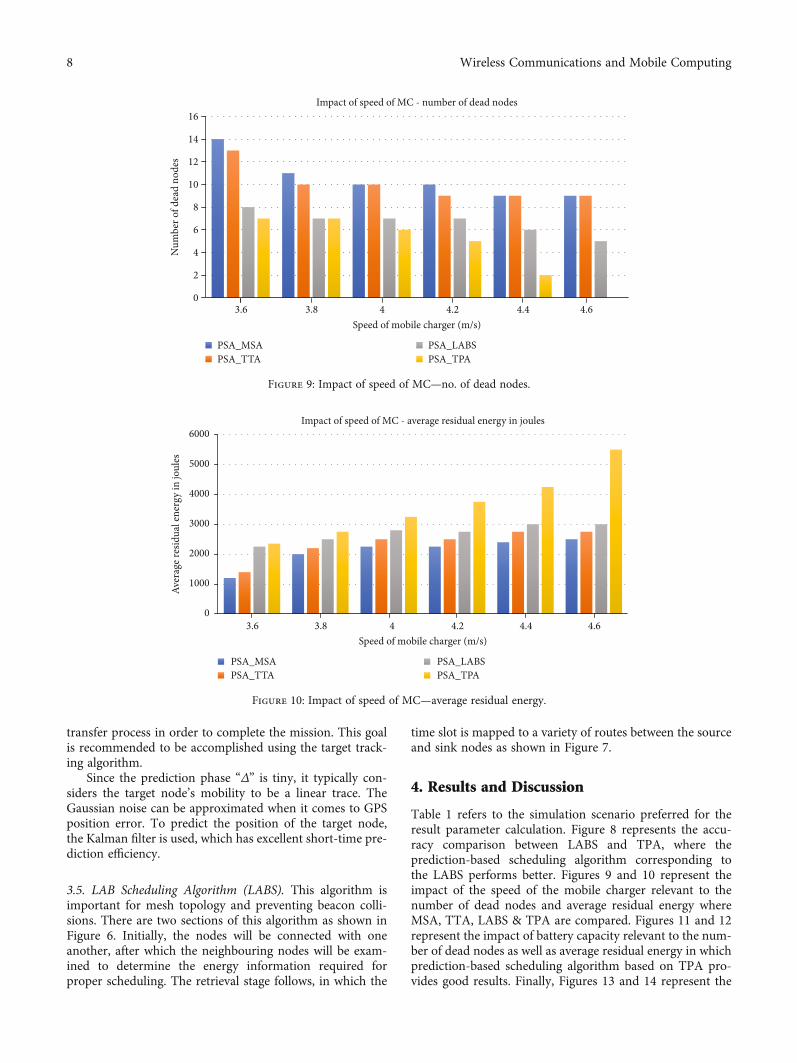
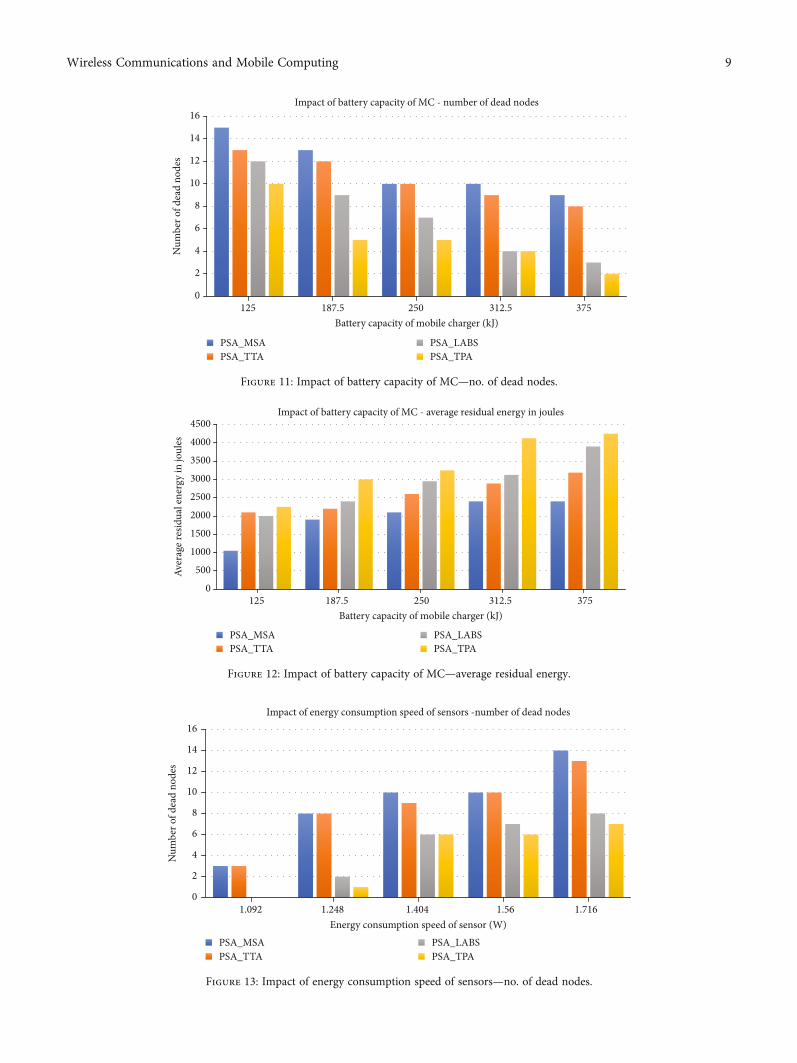
Table 1 refers to the simulation scenario preferred for theresult parameter calculation. Figure 8 represents the accu-racy comparison between LABS and TPA, where theprediction-based scheduling algorithm corresponding tothe LABS performs better. Figures 9 and 10 represent theimpact of the speed of the mobile charger relevant to thenumber of dead nodes and average residual energy whereMSA, TTA, LABS & TPA are compared. Figures 11 and 12represent the impact of battery capacity relevant to the num-ber of dead nodes as well as average residual energy in whichprediction-based scheduling algorithm based on TPA pro-vides good results. Finally, Figures 13 and 14 represent the
0
1000
2000
3000
4000
5000
6000
3.6 3.8 4 4.2 4.4 4.6
Aver
age r
esid
ual e
nerg
y in
joul
es
Speed of mobile charger (m/s)
Impact of speed of MC - average residual energy in joules
PSA_MSAPSA_TTA
PSA_LABSPSA_TPA
Figure 10: Impact of speed of MC—average residual energy.
0
2
4
6
8
10
12
14
16
3.6 3.8 4 4.2 4.4 4.6
Num
ber o
f dea
d no
des
Speed of mobile charger (m/s)
Impact of speed of MC - number of dead nodes
PSA_MSAPSA_TTA
PSA_LABSPSA_TPA
Figure 9: Impact of speed of MC—no. of dead nodes.
8 Wireless Communications and Mobile Computing
0
500
1000
1500
2000
2500
3000
3500
4000
4500
125 187.5 250 312.5 375
Aver
age r
esid
ual e
nerg
y in
joul
es
Battery capacity of mobile charger (kJ)
Impact of battery capacity of MC - average residual energy in joules
PSA_MSAPSA_TTA
PSA_LABSPSA_TPA
Figure 12: Impact of battery capacity of MC—average residual energy.
0
2
4
6
8
10
12
14
16
125 187.5 250 312.5 375Battery capacity of mobile charger (kJ)
Impact of battery capacity of MC - number of dead nodes
PSA_MSAPSA_TTA
Num
ber o
f dea
d no
des
PSA_LABSPSA_TPA
Figure 11: Impact of battery capacity of MC—no. of dead nodes.
0
2
4
6
8
10
12
14
16
1.092 1.248 1.404 1.56 1.716Energy consumption speed of sensor (W)
Impact of energy consumption speed of sensors -number of dead nodes
PSA_MSAPSA_TTA
Num
ber o
f dea
d no
des
PSA_LABSPSA_TPA
Figure 13: Impact of energy consumption speed of sensors—no. of dead nodes.
9Wireless Communications and Mobile Computing
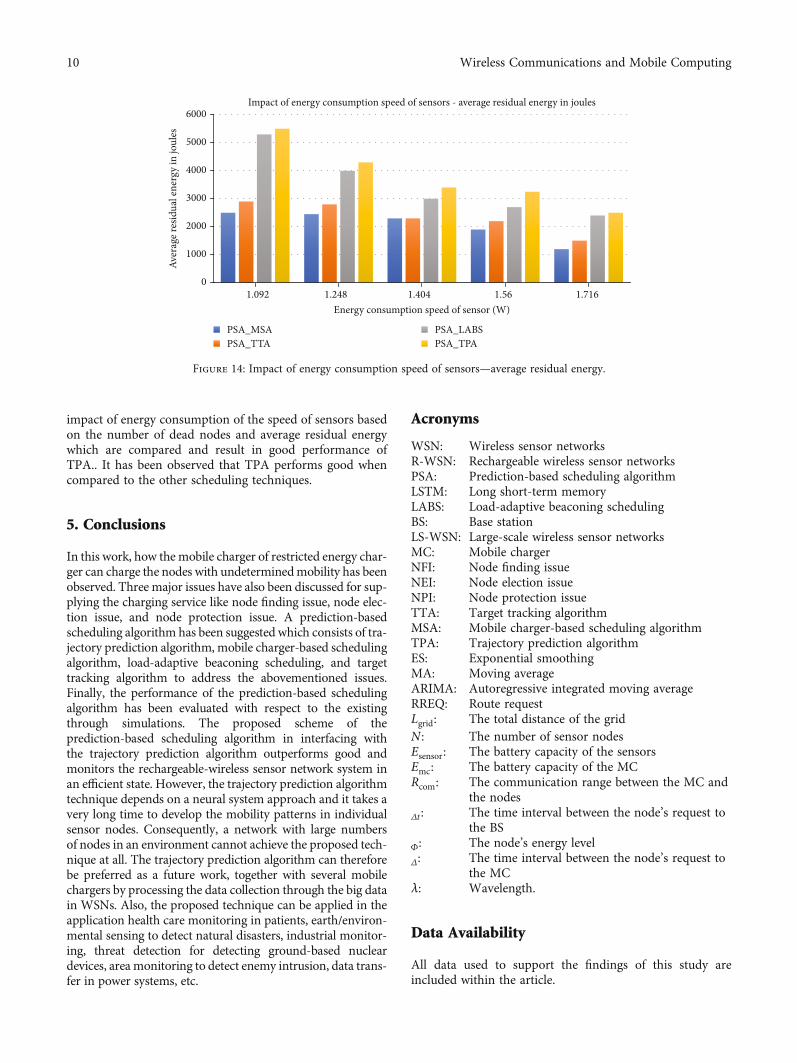
impact of energy consumption of the speed of sensors basedon the number of dead nodes and average residual energywhich are compared and result in good performance ofTPA.. It has been observed that TPA performs good whencompared to the other scheduling techniques.
5. Conclusions
In this work, how the mobile charger of restricted energy char-ger can charge the nodes with undeterminedmobility has beenobserved. Three major issues have also been discussed for sup-plying the charging service like node finding issue, node elec-tion issue, and node protection issue. A prediction-basedscheduling algorithm has been suggested which consists of tra-jectory prediction algorithm, mobile charger-based schedulingalgorithm, load-adaptive beaconing scheduling, and targettracking algorithm to address the abovementioned issues.Finally, the performance of the prediction-based schedulingalgorithm has been evaluated with respect to the existingthrough simulations. The proposed scheme of theprediction-based scheduling algorithm in interfacing withthe trajectory prediction algorithm outperforms good andmonitors the rechargeable-wireless sensor network system inan efficient state. However, the trajectory prediction algorithmtechnique depends on a neural system approach and it takes avery long time to develop the mobility patterns in individualsensor nodes. Consequently, a network with large numbersof nodes in an environment cannot achieve the proposed tech-nique at all. The trajectory prediction algorithm can thereforebe preferred as a future work, together with several mobilechargers by processing the data collection through the big datain WSNs. Also, the proposed technique can be applied in theapplication health care monitoring in patients, earth/environ-mental sensing to detect natural disasters, industrial monitor-ing, threat detection for detecting ground-based nucleardevices, areamonitoring to detect enemy intrusion, data trans-fer in power systems, etc.
Acronyms
WSN: Wireless sensor networksR-WSN: Rechargeable wireless sensor networksPSA: Prediction-based scheduling algorithmLSTM: Long short-term memoryLABS: Load-adaptive beaconing schedulingBS: Base stationLS-WSN: Large-scale wireless sensor networksMC: Mobile chargerNFI: Node finding issueNEI: Node election issueNPI: Node protection issueTTA: Target tracking algorithmMSA: Mobile charger-based scheduling algorithmTPA: Trajectory prediction algorithmES: Exponential smoothingMA: Moving averageARIMA: Autoregressive integrated moving averageRREQ: Route requestLgrid: The total distance of the gridN : The number of sensor nodesEsensor: The battery capacity of the sensorsEmc: The battery capacity of the MCRcom: The communication range between the MC and
the nodes
Δt : The time interval between the node’s request tothe BS
Φ: The node’s energy level
Δ: The time interval between the node’s request tothe MC
λ: Wavelength.
Data Availability
All data used to support the findings of this study areincluded within the article.
0
1000
2000
3000
4000
5000
6000
1.092 1.248 1.404 1.56 1.716Energy consumption speed of sensor (W)
Impact of energy consumption speed of sensors - average residual energy in joules
PSA_MSAPSA_TTA
Aver
age r
esid
ual e
nerg
y in
joul
es
PSA_LABSPSA_TPA
Figure 14: Impact of energy consumption speed of sensors—average residual energy.
10 Wireless Communications and Mobile Computing
Conflicts of Interest
The authors declare that they have no conflicts of interest.
References
[1] Y. Li, L. Zhong, and F. Lin, “Prediction-scheduling-tracking:charging nodes with non-deterministic mobility,” IEEE Access,vol. 9, pp. 2213–2228, 2020.
[2] H. Yetgin, K. T. K. Cheung, M. el-Hajjar, and L. Hanzo, “Net-work lifetime maximization of wireless sensor networks,” IEEEAccess, vol. 3, pp. 2191–2226, 2015.
[3] W. Xu, W. Liang, X. Lin, and G. Mao, “Efficient scheduling ofmultiple mobile chargers for wireless sensor networks,” IEEETransactions on Vehicular Technology, vol. 65, no. 9,pp. 7670–7683, 2016.
[4] M. Khaja Mohiddin and V. B. S. Srilatha Indira Dutt, “An opti-mum energy consumption hybrid algorithm for XLN strategicdesign in WSNs,” International Journal of Computer Networksand Communications, vol. 11, no. 4, pp. 61–80, 2019.
[5] A. C. Djedouboum, A. Abba Ari, A. M. Gueroui,A. Mohamadou, and Z. Aliouat, “Big data collection in large-scale wireless sensor networks,” Sensors, vol. 18, no. 12,p. 4474, 2018.
[6] P. Dixit, R. Kohli, and A. Acevedo-Duque, “Comparing andanalyzing applications of intelligent techniques in cyberattackdetection,” Security and Communication Networks, vol. 2021,Article ID 5561816, 23 pages, 2021.
[7] G. T. Reddy, M. P. K. Reddy, K. Lakshmanna et al., “Analysisof dimensionality reduction techniques on big data,” IEEEAccess, vol. 8, pp. 54776–54788, 2020.
[8] A. Naeem, A. R. Javed, M. Rizwan, S. Abbas, J. C.-W. Lin, andT. R. Gadekallu, “DARE-SEP: a hybrid approach of distanceaware residual energy-efficient SEP for WSN,” IEEE Transac-tions on Green Communications and Networking, vol. 5,no. 2, pp. 611–621, 2021.
[9] A. Poniszewska-Maranda, R. Matusiak, N. Kryvinska, and A.-U.-H. Yasar, “A real-time service system in the cloud,” Journalof Ambient Intelligence and Humanized Computing, vol. 11,no. 3, pp. 961–977, 2020.
[10] A. Lavric, V. Popa, and S. Sfichi, “Street lighting control systembased on large-scaleWSN: a step towards a smart city,” in 2014International Conference and Exposition on Electrical andPower Engineering (EPE), pp. 673–676, Iasi, Romania, 2014.
[11] M. Alazab, K. Lakshmanna, G. Thippa Reddy, Q.-V. Pham,and P. K. R. Maddikunta, “Multi-objective cluster head selec-tion using fitness averaged rider optimization algorithm forIoT networks in smart cities,” Sustainable Energy Technologiesand Assessments, vol. 43, article 100973, 2021.
[12] A. Naureen, N. Zhang, S. Furber, and Q. Shi, “A GPS-lesslocalization and mobility modelling (LMM) system for wildlifetracking,” IEEE Access, vol. 8, pp. 102709–102732, 2020.
[13] A. Verma, Y. Kumar, and R. Kohli, “Study of AI techniques inquality educations: challenges and recent progress,” SN Com-puter Science, vol. 2, no. 4, pp. 1–7, 2021.
[14] M. K. Mohiddin and V. B. S. S. I. Dutt, “Mobility error predic-tion based LAB scheduling algorithm for optimizing systemthroughput in wireless sensor networks,” International Journalon Emerging Technologies, vol. 11, no. 2, pp. 1087–1092, 2020.
[15] M. T. R. Khan, S. H. Ahmed, and D. Kim, “AUV-aided energy-efficient clustering in the Internet of underwater things,” IEEE
Transactions on Green Communication Networking, vol. 3,no. 4, pp. 1132–1141, 2019.
[16] A. H. Dehwah, S. Elmetennani, and C. Claudel, “UD-WCMA:an energy estimation and forecast scheme for solar poweredwireless sensor networks,” Journal of Network and ComputerApplications, vol. 90, pp. 17–25, 2017.
[17] Z. Fan, Z. Jie, and Q. Yujie, “A survey on wireless powertransfer-based charging scheduling schemes in wirelessrechargeable sensor networks,” in 2018 IEEE 4th InternationalConference on Control Science and Systems Engineering(ICCSSE), pp. 194–198, Wuhan, China, 2018.
[18] C. Wang, J. Li, Y. Yang, and F. Ye, “Combining solar energyharvesting with wireless charging for hybrid wireless sensornetworks,” IEEE Transactions on Mobile Computing, vol. 17,no. 3, pp. 560–576, 2018.
[19] A. Poniszewska-Maranda, D. Kaczmarek, N. Kryvinska, andF. Xhafa, “Studying usability of AI in the IoT systems/para-digm through embedding NN techniques into mobile smartservice system,” Computing, vol. 101, no. 11, pp. 1661–1685,2019.
[20] R. Kohli and S. Gupta, “A nascent approach for noise reduc-tion via EMD thresholding,” in Ambient Communicationsand Computer Systems, vol. 904 of Advances in Intelligent Sys-tems and Computing, , pp. 55–65, Springer, 2019.
[21] A. Kurs, A. Karalis, R. Moffatt, J. D. Joannopoulos, P. Fisher,and M. Soljacic, “Wireless power transfer via strongly coupledmagnetic resonances,” Science, vol. 317, no. 5834, pp. 83–86,2007.
[22] L. He, P. Cheng, Y. Gu, J. Pan, T. Zhu, and C. Liu, “Mobile-to-mobile energy replenishment in mission-critical robotic sensornetworks,” in IEEE INFOCOM 2014 - IEEE Conference onComputer Communications, pp. 1195–1203, Toronto, ON,Canada, 2014.
[23] J. Eriksson, L. Girod, B. Hull, R. Newton, S. Madden, andH. Balakrishnan, “The pothole patrol: using a mobile sensornetwork for road surface monitoring,” in Proceeding of the6th international conference on Mobile systems, applications,and services - MobiSys '08, pp. 29–39, Breckenridge, USA,2008.
[24] C.-F. Cheng and C.-C. Wang, “The energy replenishmentproblem in mobile WRSNs,” in 2018 IEEE 15th InternationalConference on Mobile Ad Hoc and Sensor Systems (MASS),pp. 143-144, Chengdu, China, 2018.
[25] T. Liu, B.Wu,W. Xu, X. Cao, J. Peng, and H.Wu, “Learning aneffective charging scheme for mobile devices,” in 2020 IEEEInternational Parallel and Distributed Processing Symposium(IPDPS), pp. 202–211, New Orleans, LA, USA, 2020.
[26] V. Balasubramanian, F. Zaman, M. Aloqaily, I. Al Ridhawi,Y. Jararweh, and H. B. Salameh, “A mobility managementarchitecture for seamless delivery of 5G-IoT services,” in ICC2019 - 2019 IEEE International Conference on Communica-tions (ICC), pp. 1–7, Shanghai, China, 2019.
[27] W. Yao, M. Li, and M. Y. Wu, “Inductive charging with multi-ple charger nodes in wireless sensor networks,” in AdvancedWeb and Network Technologies, and Applications. APWeb2006,, pp. 262–270, Springer, 2006.
[28] L. Xie, Y. Shi, Y. T. Hou, W. Lou, and H. D. Sherali, “On trav-eling path and related problems for a mobile station in arechargeable sensor network,” in Proceedings of the fourteenthACM international symposium on Mobile ad hoc networkingand computing - MobiHoc '13, pp. 109–118, Bangalore, India,2013.
11Wireless Communications and Mobile Computing
[29] W. Liang, W. Xu, X. Ren, X. Jia, and X. Lin, “Maintaininglarge-scale rechargeable sensor networks perpetually via multi-ple mobile charging vehicles,” ACM Transactions on SensorNetworks, vol. 12, no. 2, pp. 1–26, 2016.
[30] T. Liu, B. Wu, H. Wu, and J. Peng, “Low-cost collaborativemobile charging for large-scale wireless sensor networks,”IEEE Transactions on Mobile Computing, vol. 16, no. 8,pp. 2213–2227, 2017.
[31] Y. Ma, W. Liang, and W. Xu, “Charging utility maximizationin wireless rechargeable sensor networks by charging multiplesensors simultaneously,” IEEE/ACM Transactions on Net-working, vol. 26, no. 4, pp. 1591–1604, 2018.
[32] P. Guo, X. Liu, M. Chen, and K. Zhang, “Should interferencebe avoided? Charging WSNs with efficient placement of wire-less chargers,” IEEE Access, vol. 6, pp. 54876–54883, 2018.
12 Wireless Communications and Mobile Computing