-
8/18/2019 Exo Skelton s
1/14
Development
o
ac tive anthropom orphicexoskeletons
M V u k o b r a t o v i c D H r i s t ic Z S t o j i l j k o v i
c
n s t i t u t e
o r
Auto ma t ion & Telecommunicat ions , Mi lhai /o P upin ' ,
PO Box 906, Beograd, YugosIav ia
A bs t r a c t - - T he basic pos t u la t es o f t h is n ew
app r oach t o t he s tudy o f an t h ropom or ph i c sy stem s
dynamics are given in the paper . In compar ison wi th other
attempts, th is approach enables the
ma xima l redu ct ion o f d imensional ity , bein g based on
prescr ib ing synergy, to o ne pa r t of the
system, As an i l lust rat ion of the me thod, an exam ple is g
iven of a com plete synergy synthesis
fo r t he ad opted conf i gura ti on o f t he an thropom orph i
c sys tems.
Ke yw ord s- - An thr om orp h i c sys tems, exoske le tons ,
rehab i l it a t ion , parap leg ia , exoske le ton , robo ts
ntroduc t ion
TH HUMAN SKE LE TON can be t r e a t ed a s a com plex
n o n l i n e a r m u l t i v a r i a b l e s y s te m . T o p r
o v i d e c o m -
p l e t e s k e le t a l a c t i v i ty th e h u m a n h a s o v
e r 6 0 0
m u s c l e s a v a i la b l e , w h i c h r e p r e s e n ts m
o r e t h a n 3 0 0
e q u i v a l e n t a c t u a t o r s o f b i l a t e r a l a c
t i o n t . I n t e r m s o f
t h e m e c h a n i c a l s c h e m e , t h e s y s t e m o f s
k e l e t a l
a c t i v i t y h a s o v e r 3 0 0 d e g r e e s o f f r e e d
o m a v a i l a b l e .
W h e n i t i s i n t e n d e d t o m a k e a n a r t if i c ia
l m o d e l o f a
l o c o m o t i o n - m a n i p u l a t i v e tw o - l e g g e d
m a c h i n e t h e
p r o b l e m a r i s e s a s t o h o w t o r e d u c e t h e h
i g h d i m e n -
s i o n a l i t y a t t h e d y n a m i c a c t u a t o r l ev e
l . S e v e r a l
a t t e m p t s h a v e b e e n m a d e t o r e d u c e th e d i
m e n s i o n a l -
i t y o f t h e n a t u r a l l o c o m o t i o n - m a n i p u
l a t i v e sy s t em
w h e n s y n t h e t i s i n g a s y s t e m u s i n g a r t i
f ic i a l s k e l e t a l
ac t i v i t y .
T OMOVId an d BEL LMAN 1970) r e duc ed t he s ke l e t a l
a c t i v it y t o a v e r y li m i t e d n u m b e r o f m o v
e m e n t s
u s i n g s t i m u l a t i o n o f t h e n a t u r a l l o c o
m o t o r s y s t e m .
T h i s i s c o n s i d e r e d t o b e a m o d e s t p r o j e
c t , s i n c e n o t
e n o u g h i s k n o w n a b o u t t h e c o - o r d i n a t i
o n o f m o v e -
m e n t s d u r i n g a r ti f ic i a l l o c o m o t o r s t i
m u l a t i o n
VoDoVNIK
e t a l .
1967; 1968).
t The ms/or part of the muscular system is organised in the form
of
muscle pairs
I n a n o t h e r a p p r o a c h t h e d y n a m i c s o f l e
g g ed
m o t i o n i s s t u d i e d ; i t i s t r e a t e d a s a r i
g i d b o d y w i t h
s i x d e g r e e s o f f r e e d o m d e f i n e d b y e q u a
t i o n s w i t h a
d i s c o n t i n u o u s r i g h t - h a n d s i d e , d e s c
r i b i n g t h e c o n -
t i n u o u s m o t i o n o f t h e b o d y M c G H E E , 1 9 68
; FR A N K
a n d M C G H E E , 1 96 9). D i s c o n t i n u i t y a p p e a
r s o w i n g
j j l
Fig.
z M
J J J J J J J J
I Ze r o - m om en t po i n t z . m . p . )
Firstreceived 20th November 1972 andin fina lform 26th
January
1973
Fig . 2 Jo in t d i s tr i bu ti on w i th b iped conf i gura t
ion
t o t h e f a c t t h a t t h e f o r c e s a r e g e n e r a t
e d a l t e r n a t e l y
w h e n t h e l o w e r e x t r e m i t y c o n t a c t s th e g
r o u n d . T h e
p r o b l e m i s t h u s r e d u c e d t o t h e c a l c u l a
t io n o f f o r c e s
a n d t o r q u e s g e n e r a t e d b y t h e e x t r e m i ti
e s , f r o m w h i c h
s i x v e l o c i t i e s c a n b e c o m p u t e d ; t h e a n
g l e s a n d
p o s i t i o n s w i t h r e s p e c t t o t h e s t a t i o n
a r y s y s t e m a r e
t h e n o b t a i n e d b y m e a n s o f i n te g r a t i o n .
T h i s
a p p r o a c h i n v o l v e s t h e u s e o f a m a t h e m a
t i c a l m o d e l
i n t h e f o r m o f c l a s si c a l e q u a t i o n s o f m o
t i o n o f a
r i g i d b o d y i n s p a c e u n d e r t h e i n f lu e n c e
o f d r i v i n g
f o r c e s a n d t o r q u e s . T h e r e s u l t i s t h a t
t h e s y s t e m i s
r e p r e s e n t e d b y s ix d e g r ee s o f f r e e d o m w
h i c h d e t e r -
m i n e i t s d i m e n s i o n a l i t y , a n d t h u s i t i
s n e c e s s a r y t o
66 Me dica l and Bio logical Engineering Janu ary 1974
-
8/18/2019 Exo Skelton s
2/14
d e t e r m i n e f o rc e s a n d t o r q u e s b y m e a n s o
f a p p r o -
p r i a t e c o n t r o l t h r o u g h f e e d b a c k f o r t
h e p u r p o s e o f
g e n e r a t i n g r e p e a t e d m o t i o n i n o r d e r t
o a c h i e v e a
s t a b l e g a i t . A s e r i o u s d i s a d v a n t a g e o
f t h i s a p p r o a c h
i s t h a t m a s s l e s s l e gs h a v e b e e n a d o p t e d
. I f th e
m a s s e s o f t h e l e g s w e r e c o n s i d e r e d , t h
e y w o u l d c a u s e
c o n s i d e r a b l e e x t e n s i o n s i n t h e r e p r e
s e n t a t i o n o f t h e
s y s t e m m o d e l , a n d t h e s y n t h e s i s o f t h e
c o n t r o l
m e c h a n i s m w o u l d b e c o m e e x t r e m e l y c o m
p l e x . T h e
a d d i t i o n o f e a c h l e g i n t r o d u c e s a t l e a
s t t h r e e a d d i -
t i o n a l d e g r e e s o f f r e e d o m , u n d e r t h e c
o n d i t i o n s o f
s i m p l e j o i n t s . T o r e a l i s e t h e g a i t a l g
o r i t h m , a t l e a s t
t h e s a m e n u m b e r o f c o n t r o l s i g n a l s is n e
ce s s a r y .
B a s e d o n t h i s a p p r o a c h a n d n e g l e c t i n g
t h e i n f l u e n c e
o f l eg m a s se s , a n a t t e m p t h a s b e e n m a d e t
o c o n t r o l
t h e e x i s t i n g d e g r e e s o f f r e e d o m o n t h e
b a s i s o f t h e
e r r o r i n t he d r i v i n g to r q u e s a n d f o r c e
s
VUKOBRA-
- rovad e t a L 1 9 7 0 ) . T o a v o i d t h e l i m i t a t i
o n s o f
p a s s i v e s t a b i l i s a t i o n b y w h i c h t h e k i
n e m a t i c g a i t o f
t h e d y n a m i c s y s t e m , m o v e d b y t h e m a s s l
e s s l e gs ,
i s b a s i c a l l y c o n t r o l l e d , a n e w a p p r o a
c h t o t h e s t u d y
o f l e g g e d -m a c h i n e d y n a m i c s , p a r t i c u l
a r ly f o r a n t h r o -
p o m o r p h i c s t r u c t u r e s , i s d e s c r i b e d
.
M e t h o d o f p r e s cr i b ed
s y n e r g y
T h e b a s i c c o n c e p t u s e d i n t h e s y n t h e s i
s o f a r t if i c i a l
s y n e r g y i s t h a t t h e l a w o f c h a n g e f o r t h
e f o r c e s o f
r e a c t i o n a n d f r i c t i o n i s g i v e n i n a d v a
n c e , o r t h e i r
i n t e r r e l a t i o n s h i p h a s b e e n p r e s c r i b
e d . F o r e x a m p l e ,
z . m . p . * m o t i o n i s g i v e n , a n d t h e p o i n t
s a t w h i c h t h e
r e s u l t i n g f r i c t i o n a l f o r c e s a c t a r e p
r e s c r i b e d . T h i s
d e t e r m i n a t i o n o f d y n a m i c v a l u e s i m p o
s e s d y n a m i c
r e l a t i o n s t h a t r e s u l t i n a d d i t i o n a l d
y n a m i c c o n s t r a i n t s
i n t h e s y s t e m m o d e l . M a t h e m a t i c a l l y ,
t h i s i s e x -
p r e s s e d b y a d d i t i o n a l d i f f e r e n t ia l r e
l a t i o n s t h a t h a v e
t o b e s a t i s fi e d b y t h e a n t h r o p o m o r p h i c
s y s t e m
m o t i o n .
F r o m w h a t h a s b e e n s a id , i t a p p e a r s t h a t
, i f s o m e
p o i n t r e p r e s e n t s t h e z . m . p . , a n d i f t h
e v e r t i c a l
g r o u n d r e a c t i o n f o r ce s a r e r e d u c e d t o i
t , t h e m o m e n t
M s h o u l d b e e q u a l t o z e r o ( F i g . I ) . T h e v
e c t o r M
h a s e v i d e n t l y a h o r i z o n t a l d i r e c t i o n
, a n d h e n c e t w o
d y n a m i c c o n d i t i o n s h a v e t o b e s a t i s f i
e d : p r o j e c t i o n s
o f t h e m o m e n t o n t o t w o m u t u a l l y o r t h o g
o n a l a x e s
i n t h e h o r i z o n t a l p l a n e s h o u l d b e e q u a
l t o z e r o . I f
t h e f i x ed h o r i z o n t a l a x e s a r e d e n o t e d b
y X a n d Y
* I f a l l e l e m e n t a ry re a c t i o n
f o r c e s r e
r e d u ce d t o t h e ce n t re o f t h e
su p p o r t sur fa ce, t h e fo r ce N a n d m o m e n t M a re
o b ta i n e d . S i n ce t h e
l o a d d i a g ra m o f t h e ve r t i ca l f o r ce s i s o f
t h e sa m e s i g n , t h e g ro u n d
re a c t i o n ca n a l w a ys b e re d u ce d t o t h e re su l
t a n t fo r ce . Th i s re su l t a n
f o r c e w i l l b e d e n o t e d a s R a n d it s p o i n t o
f a c t io n u p o n t h e g r o u n d
su r f a ce ca l l e d t h e ze ro -m o m e n t p o i n t z . m
. p . ) F i g . 1 ) . I t i s t h u s
a ssu m e d t h a t f r i c t i o n a l f o r ce s ca n b e re d
u ce d t o t h e re su l t a n t f o r c e
a n d m o m e n t
m 5
rn 6
m
rn ,
3 2
F ig 3 M e c h a n i c a l b i p e d m o d e l
Medica l and B io log ica l Eng ineer ing
{m o
I - 0
J a n u a ry 9 7 4
I
7
-
8/18/2019 Exo Skelton s
3/14
then
x o
1 )
r= 0
With regard to frictional forces, the following
condition can be stated: the moment of frictional
forces with respect to some vertical axis ( is equal to
zero, and, as a result,
M~ = 0 . . . . . . . . . . (2)
The axis can pass through the centre of gravity, or
the centre of the foot support surface, or through the
z.m.p. In the last case, X, Y, ( co nstit ute an ortho-
gonal co-ordinate system. According to D'Alam-
bert's principle, the system must be in equilibrium.
S MO O TH L E V E L WA L K
assume that the foot of the anthr opomorp hic system
rests completely on the ground, so that fro = 0. The
inertia forces F and mom ent Mr i n the general case
can be represented as the linear forms of the general-
ised accelerations, and as quadratic forms with
respect to the generalised velocities:
i= 1 i= l j= l
i= 1 i= l j l .
5 )
where the vectors a~, bo, c~ and d~j are functions of
the generalised co-ordinates.
~ ; = / 3 3
~PPELVIC
The external forces acting on the loco motion system
include the friction forces, gravity forces and
ground reactions. We reduce the moments of these
forces and those of the inertial forces to the z.m.p.
and denote them by F and MF, respectively. Then,
eqn. 1 can be written as
M~+Mr)ex = 0
3 )
M~ + Mr) er = 0
where
M~ = total moment of gravity force with res-
pect to the z.m.p.
e~, ey = un it vectors of X a nd Y axes of the
fixed co-ordinate system.
The third equation of the dynamic relationships
(eqn. 2) can be written as
(Mr + p x F) er = 0 . . . . . . . (4)
where
p = vector from z.m.p, to the ~ axis point of
the action on the ground surface
e; = uni t vector of ~ axis.
We denote the generalised co-ordinates of the
mecha nism* by ~b~. In the synergy synthesis we
F i g 4 G a i t w i t h n e g l i g i b l e p e l v i c d i s p
l a c e m e n t s
Introducing these expressions into eqns. 3 and 4,
we get
Moex+ ~
c, ex~ ,+ ~ ~
doex 5,~j=O
l = i = j = l
MGey+ ~ c, ey~,+ ~ ~ dtjerff~,~j=O
i= t i= 1 j= t
/= 1 i= l J= l
i= l
i= 1 j= l
6 )
If the locomotion system has three degrees of f r ee
d o m only, the trajectory of ~t(t) for all co-ordinates
can be f ound by integrating eqns. 6. However, the
number of degrees of freedom n is generally greater
than three; this is obvious because the equilibrium
dynamic conditions discussed do not as yet contai n
any infor mation on the type of the gait.
The laws of the remaining (n-3)-co-ordinates
change should be set so as to ensure the desired gait;
i.e. a periodic displacement of the legs correspo nding
Genera/ised co-ordinates ~ o f the mechanism represent the
system internal co-ordinates.
6 8 M e d ic a l a n d B io lo g ic a l E n g in e e r in g J a
n u a ry 9 7 4
-
8/18/2019 Exo Skelton s
4/14
t o t h e a l t e r n a t e s i n g l e - a n d d o u b l e - s
u p p o r t p h a s e s .
T h i s i n f o r m a t i o n m a y b e o b t a i n e d a t b e
s t b y
d i r e c t l y s t u d y i n g t h e h u m a n g a i t . i n t
h e p r e s e n t s t a t e
o f b i o m e c h a n i c s , w e c a n a n s w e r t h e q u e
s t i o n h o w a
m a n w a l k s , b u t i t is d if f ic u l t t o s a y w h y a
p a r t i c u l a r
g a i t is j u s t l i k e t h a t . T h e r e f o r e a n y a t
t e m p t d i r e c t l y
t o o b t a i n t h e l a w s o f c h a n g e i n a l l t h e c
o - o r d i n a t e s
r s t a r t in g f r o m t h e m i n i m i s a t i o n o f s o m
e g l o b a l
c r i t e r i o n ( e . g . m i n i m u m p o w e r c o n s u m
p t i o n ) , d o e s
n o t s e e m t o b e r e a s o n a b le . ] I t s ee m s m o r
e r e a s o n -
a b l e t o p r o d u c e e x p e r i m e n t a l ly a n d r e c
o r d t h e
(ToMovI(~, VODOVNIK e t a l . 1972; 1967) . Since the
g a i t a l g o r i t h m i s s y m m e t r i c , le t u s w r i
t e th e r e p e a t a -
b i l i t y c o n d i t i o n s f o r t h e h a l f - p e r i o
d o f t h e s t e p T ,
according to VUKORRATOVlda n d J u m ~ I d ( 1 9 6 9 ) , as
r = _+ r q~ ,* (0 ) = + ~ ,* (T /2 ) (8 )
w h e r e t h e + o r - s i g n d e p e n d s o n t h e p h y s
i c a l
n a t u r e o f t h e a p p r o p r i a t e c o - o r d i n a t
e s a n d t h e i r
de r iva t i ve s .
T h e s y s t e m o f eq n . 7 , t o g e t h e r w i t h t h e c
o n d i t i o n s
o f e q n . 8 , m a k e i t p o s s i b l e t o o b t a i n t h
e n e c e s s a r y
t =O + t a b t = t a b P t b c
t
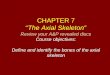
Fig . 5 Zero mom ent po in t d is
T p lacement dur i ng ha l f
t= tbc -4 - T
step.
t .b = t ime f rom hee l
st r ike to fu l l foot
contac t
tb~ = t ime from ful l foot
i contact to beg in
n i ng o f dep l oy
phase
T = fu l l s tep pe r iod
characteristics o f t h e b a s i c c o - o r d i n a t e s d e
f i n i n g t h e
h u m a n g a i t . E v i d e n t l y , t h e s e s h o u l d b
e t h e l e g c o -
o r d i n a t e s . T h u s w e h a v e t h e p o s s i b i l i
ty o f o b t a i n i n g
t h e d y n a m i c l aw s o f c h a n g e i n t h e ( n - 3 ) -
c o -
o r d i n a t e s o f t h e a n t h r o p o m o r p h i c r o b
o t s . I n th i s
w a y , t h e s y n t h e s i s o f a r t i f i c ia l s y n e r
g y i s a c c o m -
p l i s h e d a s f o l l o w s : f o r s o m e c o - o r d i n
a t e s a f i x e d
p r o g r a m o f m o t i o n ( k i n e m a t i c a l g o r i th
m ) i s se t, a n d
t h e m o t i o n o f t h e r e m a i n i n g c o - o r d i n a
t e s i s f o u n d
f r o m t h e d y n a m i c e q u a t i o n s ( e q n s . 6)
.
S e p a r a t e t h e s e ts o f v a r i a b l e s ~ i n t o t h
o s e f o r
w h i c h t h e l a w o f m o t i o n h a s b e e n p r e s c r
i b e d a n d
t h o s e w h o s e m o t i o n h a s b e e n d e t e r m i n e
d f r o m
e q n . 6 . L e t t h e f ir s t b e d e n o t e d b y ~ , a n d
t h e s e c o n d
b y r A f t e r t h e a p p r o p r i a t e t r a n s f o r m a
t i o n s , t h e
d y n a m i c e q n s . 6 c a n b e r e p r e s e n t e d i n t
h e m a t r i x
f o r m
4 : o 7 )
t l i l d l
w h e r e
e . d u = s o m e v e c t o r c o e f fi c ie n t s d e p e n d
i n g o n
g = r ep r e s e n t in g f u n c ti o n o f ~ , r ~ , ~ *
c o - o r d i n a t e s .
I n a c c o r d a n c e w i t h th e t y p e o f m o t i o n o f
le g g e d
l i v i n g o r g a n i s m s i n s t a t i o n a r y - g a i t
r e g i m e s , c e r t a i n
r e p e a t a b l e c o n d i t i o n s , w h i c h r e fl e ct
m a t h e m a t i c a l l y
t h e p a r t i c u l a r f e a t u r e , h a v e t o b e a d d
e d t o e q n s . 7
I n t h e a u t ho r ,~ o p i n i o n , so m e d e f i n i t e o
p t i m i sa t i o n c r i t e r ia a re o n l y
re l a t e d to p a r t l cu / a r lo co m o t i o n a c t i v i
t i e s o f t h e h u m a n
l a w s o f m o t i o n o f t h e v e c t o r r i .e . t o c a r
r y o u t t h e
c o m p e n s a t i o n s y n e r g y s y n t h e s is . A c c o
r d i n g l y , t h e
s y n e r g y s y n t h e s i s f o r c o - o r d i n a t e s o
f ~b* i s r e d u c e d
t o t h e s i m u l t a n e o u s s o l u t i o n o f t h e s y
s t e m s o f e q n s .
7 a n d 8 . F o r t h i s p u r p o s e , v a r i o u s i t e r
a ti v e m e t h o d s ,
n o t c o n s i d e r e d h e re , f o r s o l v i n g t h e b o
u n d a r y - v a l u e
p r o b l e m c a n b e a p p l i e d
VUKOBRATOVIC
a n d
JuRI~Id, 1969; VUKOBRATOVIC t a l . 1972).
A s a l r e a d y m e n t i o n e d , i t i s r e a s o n a b l
e t o s e l e c t
t h e c o - o r d i n a t e s 4; a s t h e a n g u l a r d i s p
l a c e m e n t s o f
t h e r o b o t ' s ' le g s ' . T h i s d o e s n o t m e a n t
h a t t h e y
c a n n o t b e c h o s e n f o r o t h e r c o - o r d i n a t
e s o f t h e
m o d e l . H o w e v e r , l e g m o t i o n , i n f a c t , d
e f in e s th e
g a i t , a n d t h i s m o t i o n i s m o r e c o m p l e x t
h a n t h e
m o t i o n o f r em a i n i n g p a r ts o f t he a n t h r o p
o m o r p h i c
s y s t e m s . I n t h a t ca s e , t h e c o - o r d i n a t e
s r r e f e r t o
t h e u p p e r p a r t , i .e . t h e t r u n k o f th e r o b
o t . I n b r i e f,
t h e s c h e m a t i c m o t i o n o f t h e r o b o t i s as f
o l lo w s :
T h e l eg s ' a r e d i s p l a c e d a c c o r d i n g t o s o
m e a l g o r i t h m
r e c o r d e d f r o m a h u m a n b e i n g , a n d t h e ' t
r u n k ' m a k e s
p e r i o d i c c o m p e n s a t i n g m o v e m e n t s t h a
t p r o v i d e f o r
a p p r o p r i a t e d i s p l ac e m e n t o f th e z . m .p ,
a n d d y n a m i c
e q u i l i b r i u m o f t h e s y s t e m i n t h e f r o n t
a l , s a g i t t a l
a n d h o r i z o n t a l p l a ne s .
A f t e r t h e s y n e r g y s y n t h e s i s i s c o m p l e
t e d , i t i s
n e c e s s ar y t o c o m p u t e t h e d r i v in g t o r q u
e s n e e d e d f o r
i t s r e a l i s a t i o n . F o r t h i s r e a s o n , l e t
u s w r i t e t h e
c o n d i t i o n s o f k i n e t o s t a t i c e q u i l i b r
i u m a r o u n d t h e
a x e s o f a l l t h e j o i n t s ( F i g . 2 ) . A s a r e s
u l t , w e o b t a i n
d i f f e r e n ti a l e q u a t i o n s o f t h e f o l l o w i
n g f o r m :
i = i = l j = l
9 )
M e d i c a l a n d B i o l o g ic a l E n g i n e e r in g J a
n u a r y 9 7 4 6 9
-
8/18/2019 Exo Skelton s
5/14
where the upper index k indica tes the jo in t number
in which the cha in has been ' broken ' ;
c~k, du k, g~ = som e vec tor coefficients
Since the fun ctions ~b(t) from eqn. 9 are know n,
al l the drivin g torqu es Ms (i = 1, 2 . . . . . n) can be
computed . I t must be ment ioned tha t , in th i s shor t
desc r ip t ion of the new method, we a re concerned
wi t h t he a n t h ropomorph i c mode l wi t hou t uppe r
ext remi t ie s . When the ' f ree ' upper ext remi t ie s a
re
involved, the mode l of the dynamic re la t ionships
(eqn. 7) i s inc reased by as many second-order
di f fe rentia l equa t ions as the ' a r ms ' have degrees
of
freedom (not d i scussed he re ) . S ince the upper
ext remi t ie s a re pass ive , the dr iv ing torques in the i
r
corresponding ' f ree ' jo in t s a re equa l to ze ro .
xampl e o f the anthropomorphic system synergy
synthesis
The bas ic s ta tements of th is appro ach to the s tudy
of a n t h ropomorph i c sys t e ms dyna mi c s we re u se d
for the synthes i s of the compen sa t ing synergy of the
anthropomorphic sys tem i l lus t ra ted in F ig . 3 . The
upper pa r t o f the s t ruc ture i s represented by a homo
-
geneous r ig id body. The lower ext remi t ie s each
possess three degrees of freedom.' l The segments of
the ext remi t ie s a re in te rconnec ted by s imple jo in t s
.
Fo r leg movem ent (presc r ibed synergy of the anthro-
pomorphic mechanism), a ' rea l ' ga i t a lgor i thm was
adopted . In F ig . 4 , the laws of change in the charac -
te r i s t ic angles of the leg a re g iven in the form of
diagrams for the case of gai t on level ground.: l : The
chosen ga i t type i s cha rac te r i sed by ve ry smal l pe lv
ic
movements , because the prac t ica l rea l i sa t ion of the
walking machine was kept in mind.
Accor ding to the a lgor i thm chosen, the foot of the
leg in the supp ort phase changes i t s pos i t ion f rom
the
heel to the toes, as shown in Fig. 5. In this case , we
can dist inguish three phases. Let us denote by t ,o
the t ime ins tant when the suppor t i s t ransfe rred f rom
the heel to ful l foot , a nd by tbc when i t is t rans
ferred
from the ful l foo t to the toes (0
-
8/18/2019 Exo Skelton s
6/14
T a b l e 1 . T a b l e s 2 a n d 3 g i v e t h e g e o m e t r
i c a l p a r a -
m e t e r s n e e d e d f o r c o n s t r u c t i n g t h e m a
t h e m a t i c a l
m o d e l g i v e n i n g e n e r a l f o r m b y t h e s y s t
e m o f eq n s . 6 .
T h e m e a n i n g o f t h e s e d a t a c a n b e u n d e r s
t o o d f r o m
Fig. 7 .
O w i n g t o t h e c h o s e n t y p e o f g a it , in w h i c
h a v e r y
s m a l l p r o p e r p e l v i c m o v e m e n t i s p r e s e
n t , a n d
a s s u m i n g s u f f ic i e nt f r i c t i o n m o m e n t w
i t h t h e f o o t i n
c o n t a c t , t h e s y n t h es i s o f t h e c o m p e n s a
t i n g s y n e r g y
w a s c a r r i e d o u t in tw o p l a n e s s a g i t t a l a
n d f r o n t a l ) ,
w h i c h l e d t o t h e n e g l e c t o f t h e t h i r d d i
f f e r en t i a l
e q u a t i o n o f t h e s y s t e m o f e q n s . 6 .
A s a p r a c t i c a l r e s u l t o f t h e s y n t h e s i s
o f t h e u p p e r -
p a r t s y n e r g y o f t h e a n t h r o p o m o r p h i c s
y s t e m u n d e r
c o n s i d e r a t i o n , t h e c o m p e n s a t i o n n e e
d e d f o r a
r e p e a t a b l e g a i t o f t h e c h o s e n t y p e * i s
g i v e n i n t h e
* u ~ represent th e so-called external' co-o rdinates of the
system
differing by a constant from the internal' co-ordinates ~i.
The
r e s o n for adopting external co-ordinates lies in the fact
that they
r e responsible for the system stability, w hich represents a
furth er
step in the realisation of a carefully considered
anthropomorphic
system capable of operating under perturbed conditions, It
should
be noted that, in the case of the realisation, the angle ~
also
includes the co-ordinates W (Fig. 15)
.Y
~ , , v p l a n e , f o r t h e w o r k i n g r e g i m e , a s
f o l l o w s :
T = 2 s , S = 1 F i g . 8 ).
e v e l o p m e n t o f a c t i v e e x o s k e l e t o n s
U s i n g t h i s a p p r o a c h , r e h a b i l i t a t i o n
d e v i c e s o f t h e
e • t y p e h a v e b e e n d e v e l o p e d o v e r s e v e r
a l
y e a r s . T h e f i r s t v e r s i o n o f t h i s t y p e w
a s r e a l i s e d a s
t h e
kinematic walker
I t h a d o n e d e g r e e o f f r e e d o m
f o r e a c h l e g , a n d , i n a g r e e m e n t w i t h t h
i s , o n e
p n e u m a t i c a c t u a t o r c y l in d e r ) e a c h a n d
a p u r e
k i n e m a t i c li n k o f p a r t i c u l a r j o i n t s . O
w i n g t o t h e
n e e d f o r a n u p r i g h t s t a n d i n g ) p o s i t i o
n , t h e g a i t
p e r f o r m e d w a s v e r y s i m i l a r t o t h e i n i t
i a l g a i t
a l g o r i t h m o n l e ve l g r o u n d , b e i n g d e f i n
e d w i t h t w o
c o n t r o l p a r a m e t e r s o n l y 1 V u K oB R A T OV I
~ a n d
JURI ~I ~, 1969). U sin g this v ersio n, sh ow n in Fig .
10,
t With the firs t version o f the exoskeleton, the *sliding gai
t type
defined by one angle (Fig. 9) has been selected
F i g . 7 A n t h r o p o m o r p h i c m e c h a n i c a l s y
s te m w i t h f i x e d
arms
M a s s M a n d m o m e n t o f i n e rt ia ~
m Jx Jv Jz
O . 1 8 O . 0 0 0 0 7 O . 0 0 0 6 5 O . 0 0 0 5 2
O 3 8 O . 0 0 4 4 O 0 0 4 4 O . 0 0 0 4 5
0 9 8 0 . 0 1 3 8 0 . 01 4 1 0 . 0 0 3 5
O . 8 3 O . 0 0 7 9 O 0 0 6 2 O . 0 0 7 1
4 . 7 0 . 2 11 0 . 1 9 0 0 . 0 3 1
0 . 9 8 0 . 0 1 3 8 0 . 0 1 41 0 . 0 0 3 5
O . 3 8 O . 0 0 4 4 O . 0 0 4 4 O . 0 0 0 4 5
O . 1 8 O . 0 0 0 0 7 O 0 0 0 6 5 O . 0 0 0 5 2
E x o s k e l e to n i n c l u d e d w e i g h t o f p a t i e n
t a l o n e
7 1 k p
D i s t a n c e I ( m )
i Ix ly I,
1 0 . 1
2 0 0 O . 40 0
3 0 0 0 . 4 5
4 - - 0 . 0 4 7 O . 1 0 . 0 9
5 -- - - - -
6 0 0 - - 0 . 4 4 5
7 0 0 - - 0 . 4 0 0
8 -- - - - -
D i s t a n c e r ( m )
i rx ry rz
1 O 0 3 0 0 O 0 3 8
2 0 0 0 . 2 2
3 - - O 0 3 3 0 O 3 3
4 - - 0 . 0 3 4 0 . 0 9 3 0 . 0 6 9
5 O. 03 8 0 O . 42
6 - - 0 . 0 3 2 0 - - 0 . 1 3 9
7 0 0 - - 0 . 1 9 2
8 O. 03 0 0 - - O . 05 9
M e d i c a l a n d B i o l o g ic a l E n g i n e e r in g J a
n u a r y 9 7 4 7
-
8/18/2019 Exo Skelton s
7/14
t h e f i r s t e x p e r i m e n t s w e r e p e r f o r m e d
w i t h t w o
p a t i e n t s a t t h e O r t h o p a e d i c C l i n i c i n
1 9 69 a n d 1 97 0.
T h e r e s u l ts w e re v e r y m o d e s t : t h e p a t i e
n t w a l k e d
a s s i s t e d b y t w o m a l e n u r s e s . S o m e e x p e
r i e n c e w a s
a l s o a c q u i r e d a b o u t a t t a c h i n g t h e c o r
s e l e t a n d t h e
m a c h i n e i t s el f t o t h e p a t i e n t s b o d y .
I n t h e c o u r s e o f f u r t h e r w o r k , t h e m o d e
l o f a
partial active exoskeleton ( F i g . 1 l ) w a s d e v e l o p e
d ,
w h i c h m a d e i t p o s s i b l e t o r e a l i s e s y n e
rg y o f t h e l eg s
w i t h t h r e e d e g r e e s o f f r e e d o m ; w h i l e th
e h i p j o i n t s
h a d t w o d e g r e es o f f r e e d o m a n d a j o i n t d r
i v e i n t h e
f r o n t a l p l a n e , w h e r e b y i t w a s p o s s i b l
e a l s o t o a c h i e v e
c o m p e n s a t i o n i n t h a t p l a n e ( a n g l e v ), w
h i c h c o n t r i -
b u t e d c o n s i d e r a b l y t o t h e r e a l i s a ti o n
o f a g a i t m o r e
l i k e t h a t o f a h u m a n . C l i n i c a l t e s t s o n
t h i s m o d e l
w e r e p e r f o r m e d i n 1 9 7 1 w i t h t h r e e p a t i
e n t s . T h e g a i t
o f t h e p a t i e n t s w a s a c h i e v e d i n a p a r t i
c u l a r g o - c a r t ,
a n d m o r e k n o w l e d g e w a s a c q u i r e d o f t h e
p h e n o -
m e n o n o f f o rc e s tr a n s f e r r e d f r o m t h e m a
c h i n e t o t h e
m a n ( a n d v i c e v e rs a ) , lo c a l p r e s s u r e s a
n d t h e l i k e .
C o n s t r u c t i o n a l l y , w i t h t h e e x c e p t i o
n o f t h e c o r s e le t
a n d t h e c o n t r o l s y s t e m , t h i s m o d e l i s v
e r y s i m i l a r t o
t h e l a t e s t o n e :
Complete active exoskeleton The
c o m p l e t e a c t i v e
e x o s k e l e t o n i s i n t e n d e d f o r t h e r e h a b
i l i t a t i o n o f
p a r a p l e g i c s w i t h r e l a t i v e l y h i g h l e s
i o n s , e x c l u d i n g
m u s c u l a r a c t i v i t i e s o f t h e l e g s a n d t h
e w a i s t - p e l v i c
r e g i o n . I n a d d i t i o n t o c o n t r o l o f t h e l
e gs , c o n t r o l o f
t h e u p p e r p a r t o f t h e b o d y i s a ls o p o s s i b
l e w i th t h i s
t y p e o f e x o s k e l e to n . T h u s t h e p r e s c r i b
e d g a i t a l g o -
r i t h m i s o b t a in e d .
T h e c o m p l e t e e x o s k e l e t o n ( F i g . 1 2) is m
a d e u p o f
t h r e e m a i n s u b a s s e m b l i e s :
c o r s e l e t w i t h t h e a d j o i n i n g s u b a s s e m
b l i e s
l e f t an d r i gh t l eg (F ig . 6) .
T h e c o r s e l e t 1 w a s c o n s t r u c t e d , u s i n g
s t a n d a r d
t e c h n iq u e s , o f p o l y e s t e r r e s in r e i n f o
r c e d w i t h p o l y -
a m i d e f ib r e s. T h e c o r s e l e t e n v e lo p e s t h
e b o d y o f t h e
p a t i e n t f r o m h i s p u b l i c - i s c h i a t i c r e
g i o n u p t o t h e
u n d e r a r m s , o v e r t h e c h e s t a n d b a c k . I t
i s f a s t e n e d
o v e r t h e s h o u l d e r s b y m e a n s o f l e a th e r s
t r a p s ( l a ) .
T h e f r o n t a l p a r t ( l c ) o f t h e c o r s e l e t i
s a s e p a r a t e
u n i t , w h i c h i s f a s t e n e d b y V e l c r o s t r i
p s ( l b ) t o t h e
d o r s a l p a r t . T h e v e n t r a l p o r t i o n o f t h
e f r o n t a l p a r t
( c o v e r ) ( l d ) i s r e i n f o r c e d b y a s h a p e d
p i e c e o f
d u r a l u m i n s h e e t i n o r d e r t o i n c r e a s e t
h e s t i f f n e s s o f
t h e p e l v i c p a r t o f t h e c o r s e l e t . A l e a t
h e r b e l t ( 2 )
c o n t a i n i n g 1 4 e l e c t r o p n e u m a t i c 3 - w a
y v a l v e s i s
f a s t e n e d t o t h e c o r s e l e t , a n d s e r v e s t
o c o n t r o l s i x
p n e u m a t i c c y l i n d e r s ( t h r e e p e r l e g ) a
s w e l l a s t w o
m e m b r a n e a c t u a t o r s ( 3 ) , w h i c h a r e p n e
u m a t i c a l l y
c o n t r o l l e d i n p a r a l l e l a n d s e r ve a s a c t
u a t o r s f o r
m o v e m e n t s i n t h e f r o n t a l p l a n e . P n e u m
a t i c p u l s e s
a r e c o n v e y e d f r o m t h e e l e c t r o p n e u m a t
i c v a l v e s t o
t h e c o r r e s p o n d i n g a c t u a t o r s v i a a p n e
u m a t i c c a b l e
f o r m e d b y p o l y a m i d e tu b e s .
T h e b a s e s (5 ) o f th e e x o s k e l e t o n h i p j o i
n t s a r e
a l s o f a s t e n e d t o t h e c o r s e l e t , g i v i n g
t h e s e c o n d
d e g r e e o f f r e e d o m t o t h e h i p j o i n t s ( r o
u n d t h e
l o n g i t u d i n a l a x i s ). B y m e a n s o f t h e le v
e r ( 5 a ) b e l o n g -
i n g t o t h e l e g s u b a s s e m b l y , th e d r i v e o f
th e m e m -
b r a n e a c t u a t o r s ( 3 ) i s t r a n s m i t t e d t o
b o t h l e g s a n d
s y n c h r o n i s e d b y m e a n s o f a l e v e l ( 4 ) s u
r r o u n d i n g
t h e c o r s e l e t f r o m t h e r e a r s i d e i n t h e f
o r m o f a n
e l o n g a t e d U . S i m u l t a n e o u s l y , i t d r i v
e s t h e l i n e a r -
f e e d b a c k p o t e n t i o r n e t e r d e t e c t i n g t
h e p o s i t i o n i n
t h e f r o n t a l p l a n e .
T h e l e g c o n t a i n s t h r e e m a i n s u b a s s e m b
l i e s : t h e
t h i g h w i t h t h e m a i n h i p j o i n t ( 6 ) , d r i v
i n g a n
a c t u a t o r i n t h e f o r m o f a p n e u m a t i c d o u
b l e - a c t i n g
c y l i n d e r ( 7) , a n d t h e a d j u s t a b l e f e m o r
a l b o n e ( 8) .
T h e m a i n h i p j o i n t i s c o n s t r u c t e d i n t h
e f o r m o f a
s i m p l e d r y b e a r i n g ( T e f l o n s l i d i n g s u
r f a c e s ) w i t h
a d j u s t a b l e f r i c ti o n . T h e p r e c i s i o n fe
e d b a c k p o t e n t i o -
m e t e r i s l o c a t e d i n t h e c e n t r a l h o l e , i
ts z e r o b e i n g
a d j u s t a b l e f r o m o u t s i d e . T h e e l e m e n t
s c o n n e c t i n g
t h e b a s e p o r t i o n s o f t h e c o r s e le t w i t h t
h e s t a t i o n a r y
p a r t ( c u p ) o f t h e j o i n t ( 6 ) a r e f a s t e n e
d t o t h e l a t t e r ,
a s w e l l a s t h e l e v e r c o n n e c t i n g i t t o t h
e a c t u a t o r ( 7 ).
T h e a c t u a t o r i s m a n u f a c t u r e d f r o m l i g
h t a l lo y s , w i t h
t h e e x c e p t i o n o f t h e r o d , w h i c h i s m a d e
o f p o l i s h e d
I n o x s t e e l . A t a n a i r p r e s s u r e o f 1 0 b a r
, a n e t a c t i v e
f o r c e o f 1 14 k p i s o b t a i n e d . T h e f e m o r a l
b o n e ( 8)
i s m a n u f a c t u r e d i n t h e f o r m o f a 2 - m e m b
e r t e le s c o p i c
t u b e m a d e o f I n o x s t e e l ( w a l l th i c k n e s s
, 0 . 8 m m ) ,
l ~ T = 2 s e c S =
~
Fig 8 Nominal gait trajectory for
biped model with fixed upper
extremities
T = step peri od
S coefficient of step size
7 2 M e d i c a l a n d B i o l o g i c a l E n g i n e e r i n
g J a n u a r y 9 7 4
-
8/18/2019 Exo Skelton s
8/14
the length of which can be adjus ted to the pa t ient
by means of a knur led nut (Sa ) . The leg support
(8b) is made of Inox steel sheet and covered with
sponge rubber . This pa r t i s fa s tened both to the
othe r pa r t of the femora l ' bone ' (8) and to the
auxil iary strut (8c).
The ' sh ank ' wi th the main ' knee ' jo in t (6a) , which
is identical to the 'hip ' joint (6), a lso contains the
auxil iary joint (6b). The actu ator (7a) is identical
to the h ip ac tua to r (7) . The ,bon e ' of the ' shank '
(9)
with the kn urled n ut (9a) is of very similar design to
tha t of the femora l ' bone ' (8) , whi le the auxi l ia ry
strut (10), with i ts nut (10a), is made of duralumin
tubes . The leg support i s cons t ruc ted in the same
way as the femoral part of the leg support (8b).
The ' foot of the leg i s connec ted by means of the
' ankle jo in t ' (11) and the auxi l ia ry jo in t (1 la ) to
the
' shank ' pa r t of the ' l eg ' . As we l l a s the o the r
two,
the main jo in t conta ins a feedback potent iomete r .
The actuator of the ' foot ' (12), is of a design very
force compon ent of the sys tem supported on the
foot; this has been used in the real isat ion of the
system stabil isat ion.
Electronic system for com plete exoskeleton control
A block schemat ic of the comple te exoske le ton
contro l is given in Fig. 14. The left-leg ime-base genera-
tor (XBCL) s the synchro nisat io n frequency source. The
period T can be regulated within the l imits of 1-5 s .
The electronic c ircuit of the right-leg t ime-base
genera tor (TBCR) is a delay circuit . Ou tput signals
from the XRGL and T~CR circuits are re la ted by the
express ion VR(t ) =
VL t+ T/2).
Fig. 14 shows al l
seven se rvosys tems for the cont ro l of the t ime
changes of the charac te r i s t ic jo in t angles ~IL, ~2L,
43L, ~blR, ~b2R, ~3R and u. S yn ch ro nis m o f the tim e
changes of the angles is preserved by the very fact
tha t a l l func t ion genera tors a re s t r ict ly t ime
con-
necte d b y the electro nic circui ts XBGL and TBGR.
Mo re precisely, the references of the servosystem are
Fig. 9 Simplest bipe d gait
C~m l--cos ot)
2 T
T = half period of the step
similar to that of the actuators (7 and 7a). but is of
smal le r d iamete r and shor te r . The ' foot ' (13) i t se l
f
i s made of Inox shee t , s t i f fened by drawn r ibs and
swaged edges , and covered on the upper s ide wi th
expanded p las t ic s sheet . The lower pa r t o f the ' foot
'
(14) is a lso made of Inox steel sheet and covered on
the lower s ide wi th semi-hard sponge rubber and
fas tened to the upper p a r t by means o f a longi tudina l
axle (swivel joint ) giving a certa in ad apta bil i ty in
the
fronta l p lane . Also , on the lower s ide of the ' foot '
(14), three force transducers with stra in gauges are
s i tua ted , and a rranged in such a way as to measure
the ve r t ical compo nents of the resul tant force a t the
points of contac t o f the exte rna l and in te rna l ba l l
s
of the foot and the hee l wi th the ground (F ig . 13) .
In th i s way i t i s poss ib le to moni tor cont inuous ly
the in tens i ty and pos i t ion of the resul tant ve r t ica
l
Medi cal and Biological Engineering January
Fig. 10 Kinematic wa lker 1969 )
974
7
-
8/18/2019 Exo Skelton s
9/14
structure (Fig. 6). In the same sketch, the necessary
des igna t ions of angles a re g iven for eas ie r explana-
t ion of the real ised synergy.
ealisation of global feedback
In the case of pe r turba t ions , even when in te rna l
synergy ~b~(t) s strictly fulfilled, the external synergy
can be pe r turbed. For example , the whole sys tem
can ro ta te a round the leg in the s tance phase in
which the exte rna l angles fl~ , be ing respons ib le for
gait s tabi l i ty, change. T he rela t io n between the
exte rna l and in te rna l co-ordina tes i s shown in a
simplified sketch of the b iped (F ig. 16a), for the
nonpe r t u rbe d a nd pe r t u rbe d s t a t e . Th i s e xa
mpl e
i l lus t ra tes how the exte rna l synergy can be spoi led
even when correc t ly sa t i s fy ing the in te rna l
synergy.
This means , in the genera l case , tha t the re la t
ionship
be tween the exte rna l and in te rna l synergy of the
a n t h ropomo rph i c sys te m c a n be r e p re se n t e d
by
Fig. 11 Partial exoskeleton 197 0)
synchronous ly connec ted , whi le the synchronism of
the rea l changes of the angles a l so depends , apa r t
f rom the re fe rences , on the charac te r i s t ic s of
the
servosystems.
A desc r ip t ion of one se rvosys tem only wi l l be
given, s ince they a re a l l cons t ruc ted in the sam e
way.
A per iodic t ime change of angle ~blL wi th the pe r iod
T is gene rated by the c ircuit G~bIL. The out put
vol tage of the genera tor i s com pared w i th the vol tage
on pote nt iom ete r PL1. The p otent iom ete r i s mou nted
in the ankl e joint ~blL. Afte rde tec t ion and ampl i f ica
-
t ion of the e rror , depending on the e rror s ign , one of
circuits PGL or PGU starts to generate pulses. The
pulse f requency can be adjus ted in advance wi th in
the range 10-25 Hz . T he pulse width i s dependen t
on the e rror ampl i tude . Elec t romagne t ic va lves a re
pulse-powered by circuits PCL and PGU (pulse-
genera tor cyl inder lower-end pos i t ion and pulse -
genera tor cyl inder upper-end pos i t ion , re spec tive ly)
,
and they open the a i r s t ream towards the upper and
lower pos i t ion , re spec t ive ly , of the p i s ton of
the
assoc ia ted pneumat ic cyl inder .
F ig . 15 i llus t ra tes the e lec t ronic rea l i sa t ion of
the
presc r ibed (F ig . 4) and the compensa t ing (F ig . 8)
synergy in pa ra l le l , for compari son. I t a l so shows
the rea l i sa t ion of the comple te synergy, measured b y
me a ns o f t he s e rvo -po t e n t i ome t e r sy s te m du r
i ng t he
ga i t o f t he a n t h ropomorph i c sys t e m. The me a su re
d
(rea l ised) synergy i s, na tura l ly , expressed in in te rna
l
angles . Fo r th i s reason, the e lec t ronic rea l i sa t ion
of
the presc r ibed program is g iven in in te rna l co-
ordina tes , too . Fo r reasons o f c la r i ty , F ig . 15
shows
a ske tch of the sys tem corresponding to the rea l i sed Fig.
12 Complete exoskeleton 197 1-7 2)
74 Medical and Biological Engineer ing January 974
-
8/18/2019 Exo Skelton s
10/14
Fig 13 Artif icial foo t with forc e transducers
the matrix equation
fl = B~6+c c = constant . . . . (10)
The regulation procedures for stabilisation of the
perturbed stationary r6gimes of the gait will not be
dealt with here. They are the subject of another
paper by VUKOBRATOVIC and STEPANENKO (1972).
We shall briefly describe the regulating scheme
based on measuring dynamic reactions during the
walk, which avoids the use of gyroscopic instru-
ments.
It is evident that some relatio nship exists between
the force of dynami c reaction F = (Fx, Fr , Fz) and
the appropriate dynamic moments about three axes
connected to the z.m.p.s, M = Mx, Mr, Mz).
Components Fx and Fy define the moments
abou t th e 2: axis only. With the previous assump tion
of a sufficient moment of the frictional forces, we
only take into account the component Fz, which
contributes to the appropriate moments round the
X and Y axes. We also assume that the int ern al
synergy is realised sufficiently accurately, and that
the perturbation only appears in the system external
co-ordinates.
Fig. 16b illustrates schematically the measureme nt
of the vertical component of the dynamic reaction,
from which one can write the following relationships:
s FBz-- Fez) = Mx )
d~ Faz-d2 FBz+ F~z) = Mr
l l )
where FAZ ez
and Fez are the vertical components
of the reaction, measured at the points A, B and C.
It should be emphasised that, in the nominal
regime, the moments Mx and Mr are by definition
equal to zero (z.m.p.). Owing to the perturbed
vertical component Fz, they do, in fact, have values
AMx and AMr. We assume these perturbations to
he small.
For the model illustrated in Fig. 3, the components
of the moment for z.m.p, can be written as
.,v,'x = ,~ x(~ ;, ~, ~, ~,,.,,, ,~, ,~,, ,~,, ,~,) )
M , = M, .(~; , ~, , / :, , , : ,, , l , , o, ,~, , L, .8 ,)
12)
Since the accelerations are the most sensitive factor
and a direct consequence of the load change, the
increments in moment for the perturbed regime are
I I r I I
' ~ ] , - I E ~ Z 3 1 q r - 3
Fig 14 Block diagram o f complete exoskeleton synergy
realisation
Med ical and Biological Engineering January 974 75
-
8/18/2019 Exo Skelton s
11/14
t /
' ~ I i84
~ I I
I
%
\ \ ~ \ i
i I
7 6 M e d i c a l a n d B i o l o g ic a l E n g i n e e r i n g
J a n u a r y 9 7 4
-
8/18/2019 Exo Skelton s
12/14
given as
A M x
? Mx A~+ ? Mx AS + ~ ? Mx ..
~7~- 3 :1 ~7 Aft, (13)
cqMr A ~ + ~Mr Ai)+ ~ eM r Aft,
Thus i t is assumed that the internal algorithm
develops precisely by means of special tracking
systems, and that the change in acceleration occurs
simply because of the appropriate change in forces.
If we extend this assumption further , i t is natural to
assume th at all increments o f acceleration of all
e lements o f the an thropomorph ic m echanism in the
sagittal plane are identical; i.e.
t f
In that case, solving eqn. 13 for the accelerations in
the sagit tal and frontal plane, we get
A ~ - A , A 5 -
Az . . . . . (14)
A A
f l represents the complete set of the external co-
ordinates of the system. In the case considered, the
increments of the acceleration of the external co-
ordinates are A~ and AS.
\
lal
(bl
Fig 16 Sche matic illustration of vertical reactions
where
A M r OMx _ AM x aMy )
A l
= ~b ~5
]
I
A M [c3Mx 6 ~Mx'~ ]
AM [~ Mr 6 c3Mr~ [
[8 M x 6 9 Ma \ ~Mr I
[ ~M r & 8Mr~ gMx I
- - - 2 a - - - -
Taking into account eqn. 10, i t is possible to obtain
the relationship between the accelerations:
q~ = B -x f . . . . . . . . . (16)
With regard to the system of eqn. 9, it is possible to
define the compensating driving torques in the
function of the increments of acceleration of the
' internal ' synergy:
A M = A A ~ . . . . . . . . (17)
where A = ]laull an d a u = 3MdO~,.
Com bining eqns. 16 and 17, the impo rtant rela-
t ionship is obtained that serves as the basis for
deriving the stabil isation algorithm:
A M = AB -a A f . . . . . . . (18)
15)
Fig 17 Hea lthy person in exoske/eton
Medical and Biological Engineering January 974
-
8/18/2019 Exo Skelton s
13/14
Fig 20 Fi lm insert from cl inical tr ials
Medical and Biological Engineering
In the majority of cases the patients favourably
accepted the machine in i ts present form, and did
not reject i t af ter prolonged an d repeated tr ials.
A com paratively high level o f reliabil i ty of the whole
technical system has been attained, enabling uninter-
rupted tr ials of two hours duration and more.
Conclusion
The results presented in this paper illustrate the
efforts made over many years to realise an active
orthotic system, which could be applied to the
rehabili tation of handic apped persons. The basic
aim is to release the paralysed paraplegic person
from the wheelchair , the only existing means of
locomotion which is available in closed environ-
ments. Since only the opinions of medical experts
and paralysed patients are conclusive as to the f inal
success of the project , i t must be confessed that the
problem has not by any means been solved. In other
words, the exoskeleton, as a m eans o f rehabili tation,
is by now at the star t of a systematic clinical evalua-
tion. I t should be emphasised that the exoskeleton is,
in i ts present state, capa ble of enabling the gait upo n
level ground aided by supporting canes of a para-
plegic patient with a high lesion. These canes do not
introduce any driving energy, but play the role of
the simplest stabil ising system .* At the sam e time,
control schemes for perturbed working regimes
were being developed, thus init iating work on the
rea lisa tion o f the au tomat ic m ain tenance of dynamic
equilibrium. In this phase of the investigation,
force feedback, obtained by measuring the dynamic
reactions at the contact point, together with the
support measurement, has proved to be a fair ly
reasonable parameter . Thanks to this control
scheme, up to the present, gyros copic instruments
for the assessment of stabil isation c orrection signals
have not been necessary.
Furthe r e valuation of the exoskeleton will be
continued with the aim of prolonging the gait phase
upon level ground and performing the action of
ascending and descending stairs. Also the compen-
sating system will be further developed, since its
realisation has been based on measuring dynamic
reactions during the gait .
In the forthcom ing 3-year project , which will
continue to be supported f inancially by the Social
and Rehabili tation Service, Washington, DC, the
final goal is to provide fo r the paraplegic a safe gait
upon level ground and stairs using canes, the only
purpose o f which are to secure microcompensat ion
of the regulating system. By keeping to such a simple
correction system, the project becomes realist ic,
because i t makes i t possible to do without the very
complicated and economically unjustif ied computer
system which cou ld p roduce exact au tomat ic
balancing.
9R has to be emphasised that, for feedback in volv ed b y
dynamic
reaction , it is necessary to "correct" the autom atic
stabi/isatio n due
to imperfections of the serve system
January 974
9
-
8/18/2019 Exo Skelton s
14/14
On the other hand, the question still remains as to
how much has got to be done in this field of robot
application in order to allow the paraplegic to be
able to leave his wheelchair. This question cannot
be fully answered without several years of systematic
investigation of the system in other orthopaedic
centres. At present it is evident that, in the realising
of an artificial gait for paraplegics, the patients them-
selves can be given as a free parameter only the
decision on the type of action. It seems that this
means for restoring locomoti on properties to severely
handicapped persons must be developed until the
fundam ental problem of sensory feedback is solved.
Only then it will be possible to establish a natural
relationship between the pat ient s intenti on and the
machine that makes his desired movements possible.
Acknowledgment--The
work was done, and the paper
was written, under support by a Grant of the Social
Rehabil itation Service, Washington, DC.
References
FRANK, A. and McG~EE, R. (1969) Some considerations
relating to the design of autopilots of legged vehicles.
J. Terramech. 6.
MCGHEE, R. (1968) Some finite state aspects of legged
locomotion. Math. Biosci. 2, 67-84.
TOMOVI~, R. and BELLMAN,R. (1970) Systems approach
to muscle control.
Math. Biosci.
8, 265-277.
VUKOBRATOVIC,M. (1972) Artificial locomotion systems:
Dynamics, control algorithms, stability. Ph.D. Thesis,
Moscow.
VUKOBRATOVI ~,M., t~lRI~, V. and HRISTI ~,D. (1971)
Control of two-legged locomotion systems. Proc. 4th
IFAC Syrup. Autom. Contr. in Space,
Dubrovnik.
VODOVNIK, L ., CROCHET1ERE,W . and RESWlCK,J. (1967)
Control of a skeletal joint by electrical simulation of
antagonists.
Med. Biol. Eng. 5.
VUKOBRATOVIt~, M., FRANK, A. and JORI616, D. (1970)
On the stability of biped locomotion. IEEE Trans.
BME--17, 25-36.
VUKOBRATOVI ~,M. and Juslt~l~, D. (1969) Contribution
to the synthesis of biped gait. IEEE Trans. BME-16,
1-6.
VODOVNIK, L., KRALJ, A., KELglN,D. and BOROVgAK,L.
(1968) Theoretical and experimental investigations of
dynamic processes during movements of electrically
stimulated extremities. Final report to the Institute
Milhailo Pupin.
VUKOBRATOVIC,M . and STEPANENKO,J. (1972) On the
stability of anthropomorphic systems. Math. Biosci.
15, 1-37.
VUKOBRATOVIC, M.,
STEPANENKO, J. ~IR IC, V. an d
HRISTI6, D. (1970) Cont ribution to the study of
anthropomorphic systems. Proc. 5th IFAC Congr.,
Paris.
L e d 6 v e l o p p e m e n t d e x o s q u e l e t te s a n t h
r o p o m o r p h e s a c t iv e s
Sommaire---Les postulats servant de base/t cette nouvelle
approche ~t l ~tude de la dynamique des syst~mes
anthropomorphes sont explicit6s dans cette communication. Par
rapport aux autres tentatives,
cette approche rend possible une r6duction maximale de
dimensionnement en prenant comme
point de d6part l attribution du ph6nom6ne de synergie ~t une
quelconque pattie du syst6me. A
titre d illustration de la m6thode consid6r6e, il est fourni une
synth~se synergique complete de la
configuration retenue pour les syst~mes anthropomorphes.
D i e E n t w i c k l u n g v o n a k t i v e n a n t h r o p o
m o r p h e n G l i e d e r f O s s e r n
Zusammenfassung Die Grundpostulate dieses neuen Versuchs einer
Studie der Dynamik von anthropo-
morphen Systemen werden in dieser Arbeit dargelagt. Im Vergteich
zu anderen Versuchen macht
dieses Vorgehen eine weitestgehende Reduzierung der
Dimensionalit/it dadurch m/Sglich dass,
es sich darauf stiitzt, einem Teil des Systems Synergie
zuzuschrieben. Als Illustration der Methode
wird ein Beispiel einer vollst~indigen Synergie-Synthese ftir
die angenommene Konfiguration des
anthropomorphen Systems angeftihrt.
8 M e d i c a l a n d B i o l o g i c a l E n g i n e e r i n g
J a n u a r y 1 9 7 4