Embed Size (px)
Citation preview

lable at ScienceDirect
Journal of Structural Geology 60 (2014) 30e45
Contents lists avai
Journal of Structural Geology
journal homepage: www.elsevier .com/locate/ jsg
Explaining the physical origin of Båth’s law
Jure �ZaloharUniversity of Ljubljana, Faculty of Natural Sciences and Engineering, Department of Geology, A�sker�ceva 12, SI-1000 Ljubljana, Slovenia
a r t i c l e i n f o
Article history:Received 18 August 2012Received in revised form15 December 2013Accepted 17 December 2013Available online 31 December 2013
Keywords:Båth’s lawCosserat continuumFault interactionUSGS global earthquake catalog
E-mail address: [email protected].
0191-8141/$ e see front matter � 2013 Elsevier Ltd.http://dx.doi.org/10.1016/j.jsg.2013.12.009
a b s t r a c t
Båth’s law is one of the three well-known scaling laws for earthquakes. It states that the difference inmagnitudes of the mainshock and its largest aftershock is approximately constant, independent of themagnitude of the mainshock. Despite the progress in understanding the nature of Båth’s law, thequestion of whether this law has a physical basis, or is simply a consequence of basic statistical featuresof aftershock sequences, has remained controversial. In this article we show that Båth’s law can bederived within the Cosserat continuum theory from equations describing fault interaction. Our equationscan describe both (1) the interacting mainshocks and aftershocks, and (2) the interacting foreshocks andmainshocks. We also derive (1) spatial extension of Båth’s law to the normalized distance between thelocations of the interacting mainshocks and aftershocks (or foreshocks and mainshocks), and (2) tem-poral extension of Båth’s law to the difference between the time of the interacting mainshocks and af-tershocks (or foreshocks and mainshocks).
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
It is well known that an earthquake of large magnitude is usuallyfollowed by a sequence of smaller earthquakes called aftershocks(e.g. Nanjo et al., 2007), which are caused by stress transfer (diffu-sion) induced either by mainshock or a viscous relaxation process(e.g., Helmstetter and Sornette, 2002; Shcherbakov and Turcotte,2004). Aftershocks occur close to the focus of the mainshock,gradually decreasing in activity with increasing time over manymonths and even years. The behavior of aftershock sequences hasbeen studied statistically in detail by numerous authors whoderived several empirical scaling laws (Utsu, 1961; Kisslinger andJones, 1991; Kisslinger, 1996). The three best known are Guten-berg-Richter’s law, modified Omori’s law and Båth’s law. Gutenberg-Richter’s law has been found to be applicable to the aftershockfrequency-magnitude statistics, while the temporal decay of after-shock sequences in many cases satisfies modified Omori’s law.Båth’s scaling law states that it is a good approximation to assumethat the difference in magnitude between mainshock, m1, and itslargest aftershock,m2, is constant,m1 �m2 ¼ const., independent ofthemagnitude of themainshock (Båth,1965). A number of extensivestudies of the statistical variability of Båth’s law have been carriedout (Vere-Jones, 1969; Shcherbakov and Turcotte, 2004; Saichevand Sornette, 2005; Kisslinger and Jones, 1991; Console et al.,2003; Helmstetter and Sornette, 2002; Vere-Jones et al., 2006;
All rights reserved.
Lombardi, 2002). Despite the progress in understanding the natureof Båth’s law, the question of whether this law has a physical basis,or is simply a consequence of basic statistical features of aftershocksequences, has remained controversial. In early studies, Vere-Jones(1969) pointed out that even without any physical basis, the dis-tribution of the difference between the magnitudes of the largestand second largest events in an arbitrary sequence of events shouldbe independent of the number of events in the sequence. This hintedsome form of statistical origin of the law. Lombardi (2002) andConsole et al. (2003) explored this possibility in a much greaterdepth, and concluded it was still possible that some additionalphysically-based component was needed to explain the observa-tions. Even more recently, Helmstetter and Sornette (2002), andSaichev and Sornette (2005) have made detailed studies of thegeneral branching process, called the Epidemic Type AftershockSequence (ETAS) model of triggered seismicity. The ETAS model is amultigenerational model inwhich aftershocks from one earthquaketrigger their own aftershock sequences through multiple genera-tions of earthquakes. The frequency and magnitude distributions ofthe triggered events, while still fundamentally based on Omori’s lawand Guttenberg-Richter’s law, have more complex formulations tobetter represent the statistical distributions seen in earthquakescatalogs. Within these models Helmstetter and Sornette (2003) andSaichev and Sornette (2005) established conditions under whichBåth’s law appears. In addition, Helmstetter and Sornette (2003)pointed out that the selection process of aftershock sequence as asubset of the whole seismic catalog plays a significant role incalculating the difference in magnitudes between the largest and

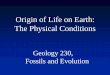
Fig. 1. Micro- and macro-rotations in a Cosserat continuum (after �Zalohar, 2012).
f!macro
represents the large-scale regional rotation related to faulting (¼ axial vector of
the deformation gradient tensor). f!Cosserat
is the Cosserat microrotation of individual
segments of the Cosserat continuum. f!rel
is the relative microrotation, which isdefined as the difference between the macrorotation and the Cosserat microrotation.
l!
1, l!
2, and l!
3 are kinematic axes of the instantaneous deformation tensor (the ei-genvectors of this tensor).
J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 31
the second largest event. They argued that this difference iscontrolled not only by the magnitude scaling but also by the after-shock productivity.
Vere-Jones et al. (2006) described another general basis forBåth’s law without the need for a special physical mechanism,while Shcherbakov and Turcotte (2004) developed a modifiedversion of Båth’s law on a more physical basis. They introduced thenotion of the inferred “largest” aftershock from an extrapolation ofthe Gutenberg-Richter’s frequency-magnitude statistics of theaftershock sequence of a given mainshock. The scaling associatedwith modified Båth’s law implies that the stress transfer respon-sible for the occurrence of aftershocks is a self-similar process. Theyalso estimated the partitioning of energy during a mainshock-aftershock sequence and found that about 96% of the energydissipated in a sequence is associated with the mainshock, whilethe rest is associated with the aftershocks. They suggested that theobserved partitioning of energy could play a crucial role inexplaining the physical origin of Båth’s law.
In this article we describe a new approach in understanding thephysical basis of Båth’s law. We show that Båth’s law can be derivedfrom equations describing fault interaction in the Cosserat con-tinuum. In the last two decades, considerable progress in under-standing the faulting process by applying the Cosserat continuumtheory showed that the classical continuum theory is incapable ofproperly describing geological faulting (e.g., Twiss et al., 1991, 1993;Twiss and Unruh, 1998, 2007; Figueredo et al., 2004; Twiss, 2009;�Zalohar and Vrabec, 2010; �Zalohar, 2012). It was discovered thatthe movement along the faults is related in a systematic way to theglobal deformation and rotation fields, and to the local micro-rotations of blocks bounded by the fault planes. Any rotationaldeformation of the Earth’s crust due to the slip along more or lessdense networks of faults is related to a difference between theregional macrorotation of the rock mass and local microrotation ofindividual blocks. This difference is called the relative micro-rotation and results in correlation and interaction between themovements along the faults that represent the boundary of theblocks involved. The Cosserat continuum theory predicts threetypes of fault interactions: (1) intersecting-faults interaction(�Zalohar and Vrabec, 2010; �Zalohar, 2012), (2) parallelefaultsinteraction (this article), and (3) parallelewedges interaction (thisarticle). We show that in the Cosserat continuum, the parallelefaults and parallelewedges interactions lead to Båth’s law. In thefirst chapter, we summarize some basic ideas of the Cosserat con-tinuum. Themeaning of these basic principles is not fully discussed,so the reader should refer to the articles by Twiss et al. (1991, 1993),Twiss and Unruh (1998, 2007), Figueredo et al. (2004), Twiss(2009), �Zalohar and Vrabec (2010) and �Zalohar (2012). In thefollowing chapters the mathematics behind the parallelefaultsinteraction is described. The presented mathematical analysis is acontinuation of the article written by �Zalohar (2012), whodescribed the interaction between intersecting faults, along whichthe slip direction is subparallel to their common intersection di-rection (the wedge faulting).
2. Kinematics of the Cosserat continuum
Kinematics of the Cosserat continuum is characterized by a
(micro)rotational degree of freedom f!Cosserat
(Fig. 1), which is in-dependent of the translatorymotion described by the displacementfield u!. Let u!1 and u!2 represent the displacements of the two
neighboring blocks, and f!Cosserat
represents their microrotations.The size of the blocks, L, is equal to the distance between theircentroids, and also represents a characteristic length of the rotating
blocks in the Cosserat continuum. The distance between the centerof microrotation and the boundary (fault) between the two blocksis L/2. The relative motion on the boundary between the blocks (onthe fault) is:
u!rel ¼ u!12 þL2
�n!� f
!12
�¼ u!12 �
L2
�f!
12 � n!�; (1)
where u!12 ¼ u!2 � u!1 is the relative translation of the first block
with respect to the second, and f!
12 ¼ 2f!Cosserat
is the relativemicrototation of the first block with respect to the second. n! is theunit normal to the fault splitting the blocks apart. Note that inEquation (1) the center of rotation coincides with the mass centerof the blocks. In the Cosserat continuum the corresponding strainmeasures are the Cosserat strain tensor e and the torsion-curvaturetensor k (Forest, 2000; Forest and Sievert, 2003; Forest et al., 1997,2000, 2001):
e ¼ u�WC ¼ u!5V/
þ ε f!Cosserat
¼ vuivxj
þ εijkfCosseratk ;
k ¼ f!Cosserat
5V/
¼ vfCosserativxj
:
(2)
We have also introduced the deformation gradient tensor (orinstantaneous macrodisplacement gradient)
u ¼ uij ¼ vui=vxj ¼ u!5V/
, and the Cosserat microrotation tensor
WC ¼ �ε f!Cosserat
. The symmetric part u(S) of the deformationgradient tensor defines the macrostrain, which describes thedeformation of the line joining the centroids of the two blocks,while the antisymmetric part u(A) defines the instantaneous mac-rorotation, which contributes to the rotation of the line joining thecentroids (e.g., Twiss and Unruh, 2007). The eigenvalues and ei-
genvectors of the u(S) are denoted by l1, l2, l3 and l!
1; l!
2; l!
3.Because the deformation gradient tensor can be decomposed intothe symmetric and skew-symmetric parts u ¼ u(S) þ u(A), theCosserat strain tensor can be written as:
e ¼ uðSÞ þ uðAÞ �WC ¼ uðSÞ þ A; (3)
with e(S) ¼ u(S) and e(A) ¼ A. We have introduced the relativemicrorotation tensor

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e4532
A ¼ uðAÞ �WC ¼ Wmacro �WC ¼ �ε
�f!macro
� f!Cosserat�
¼ �ε f!rel
:
(4)
The macrorotation or skew-symmetric part of the displacement
gradient tensor is Wmacro ¼ �ε f!macro
, with axial vector f!macro
.
The difference ðf!macro
� f!Cosserat
Þ between the macrorotation andmicrorotation vectors is here termed the relative microrotation.
Normally, the Cosserat microrotation vector f!Cosserat
and macro-
rotation vector f!macro
are axial vectors, which can have anyorientation. However, following the simplified model of Twiss et al.(1991, 1993) and Twiss and Unruh (1998, 2007) we presume that
both vectors are parallel to the intermediate eigenvector l!
2 of themacrostrain tensor u(S), because this is likely to be the most sig-
nificant component. In this case we have f!rel
¼ frel l!
2 (�Zaloharand Vrabec, 2010).
2.1. The slip direction
The second- and third-order projection tensors N and T aredefined with the fourth-order identity tensor 1 ¼ 1ijkl ¼ dikdjl andthe unit normal to the microplane (fault) Rt as (e.g. Etse and Nieto,2004):
N ¼ n!5 n! ¼ ninj;T ¼ n!$1 � n!5 n!5 n! ¼ nl1ijkl � ninjnk:
(5)
The movement along the fault is associated with the translationand microrotation of the block of the size L. In the homogeneousCosserat strain field, the slip along the fault is (�Zalohar and Vrabec,2010; �Zalohar, 2012):
u! ¼ dm! ¼ LT : e ¼ LTijkejk: (6)
Here, m! represents the unit vector in the direction of slip alongthe fault, and d is the amount of slip.
2.2. The stress measures
Surface forces and couples are represented by the generally non-symmetric tensors, the force-stress tensor s ¼ sij and the couple-stress tensor m ¼ mij:
s! ¼ s n! ¼ sijnj and m! ¼ m n! ¼ mijnj: (7)
The force stress vector and the couple-stress vector can bedecomposed into the normal and tangential components:
sn ¼ N : s ¼ Nijsij; s! ¼ T : s ¼ Tijksjk;mn ¼ N : m ¼ Nijmij; m!t ¼ T : m ¼ Tijkmjk:
(8)
sn and mn represent the normal projected stress and the normalprojected couple-stress, whereas s! and m!t represent the shearstress vector and the tangential projected couple-stress vector,respectively.
2.3. Elastic constitutive equations
The form of the Cosserat elasticity tensors for all symmetryclasses has been derived by Kessel (1964) andwas further discussedby Ilcewicz et al. (1968). For the isotropic case, the two classical
Lamé constants l and m are complemented by four additional pa-rameters (e.g., Forest, 2000):
s ¼ l1 TrðeeÞ þ 2meðSÞe þ 2mceðAÞe ;
m ¼ a1 TrðkeÞ þ 2bkðSÞe þ 2gkðAÞe :(9)
Here, 1 ¼ dij is the third order identity tensor, Tr(ee) and Tr(ke)are traces of the elastic Cosserat strain and torsion-curvature ten-sors, eðSÞe and kðSÞe are symmetric parts, and eðAÞe and kðAÞe are theskew-symmetric parts of the both tensors. Note that the index emarks the elastic deformation.
If the relative microrotation is equal to zero and the deformation
is homogeneous, it follows that Ae ¼ eðAÞe ¼ 0 and
fCosserate ¼ fmacro
e ¼ const: The torsion-curvature and couple-stress tensors are also equal to zero, ke ¼ 0 and m ¼ 0, because
the torsion-curvature tensor ke ¼ f!Cosserat
e 5V/
is related to thegradient of the Cosserat microrotation. The stress tensor is:
s ¼ l1 TrðeeÞ þ 2meðSÞe : (10)
The rock behaves as the classical continuum. We assume that inthe Earth’s crust the elastic deformation of rocks is not related toany microrotations. These are only related to the sliding along thefaults. Therefore, elastic deformation of rocks can be describedwithin the classic elastic continuum theory.
2.4. The J2 plasticity model
Assuming the strain is small, the Cosserat deformation andtorsion-curvature tensors are decomposed into elastic and plasticparts (e.g., Willam, 2002; Forest and Sievert, 2003):
e ¼ ee þ ep; k ¼ ke þ kp: (11)
In the description of the cataclastic flow and geological faultingwe assume that ee� ep and ke� kp, so ez ep and kz kp. Note thatthe index pmarks the plastic deformation. The yielding is describedby using the yield function f(s, m, R), and occurs when f(s, m, R) � 0(the plastic yield condition) (Willam, 2002). R is a thermodynamicforce associated with the material internal variable (see, forexample, Forest and Sievert, 2003, for a more detailed definition).In the literature, numerous yield functions have been proposed (e.g.de Borst, 1991, 1993; Mohan et al., 1999; Hansen et al., 2001;Manzari, 2004; Salari et al., 2004). The onset of yielding of theCosserat medium can be successfully accounted for by using theMohr-Coulomb, von Mises or Drucker-Prager yield functions (J2plasticity), as discussed, for example, by Sawczuk (1967), Lippmann(1969), Besdo (1974, 1985), Mühlhaus and Vardoulakis (1987), deBorst (1991, 1993), and Forest and Sievert (2003). In all cases, theform of the constitutive equations relating the stress and couple-stress to the rate-of-strain and rate-of-torsion-curvature is(�Zalohar, 2012):
s ¼ P1þ 2ma _eðSÞp þ 2mb _e
ðAÞp ;
m ¼ 2mc _kðSÞp þ 2md _k
ðAÞp ;
(12)
where ma, mb, mc, and md are shear viscosities, and P is the hydrostaticpressure term.
2.5. Description of the homogeneous Cosserat deformation
In the homogeneous strain field, the rate-of-gradient of theCosserat microrotation is equal to zero. It follows that the rate-of-torsion-curvature tensor is also equal to zero (�Zalohar, 2012):

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 33
_kp ¼ _f!Cosserat
5V/
¼ 0: (13)
It follows from the constitutive equations (Equation (12)) that inthe homogeneous Cosserat deformation field the couple-stresstensor is equal to zero:
m ¼ 2mc _kðSÞp þ 2md _k
ðAÞp ¼ 0: (14)
This means that in the homogeneous Cosserat strain field thestate of stress along the faults only depends on the stress tensor.
Fig. 2. The dependence of the shape parameter c3 on the ratio ε ¼ a/b between thesemimajor and semiminor axes.
3. Simple models of faults
The J2 plasticity model and plastic constitutive equations arerelated to the cataclastic seismic or aseismic flow of rock. In seismicevents, the accumulated elastic deformation is suddenly releasedon slip patches on different parts of the faults at different times(Faulkner et al., 2010). In this case, the rock behaves as the Cosseratcontinuum. The flow of rock is thus governed by the Cosseratconstitutive equations and asymmetric stresses. By contrast, theinitial and final elastic deformation of rock before and after seismicevents, and the initial and final amount of slip along the faults aregoverned by the classical elastic constitutive equation and sym-metric stresses, Equation (10). In addition, in the homogeneousCosserat strain field, the state of stress on the faults only dependson the stress tensor, Equation (14). From this it follows that theinitial and final amount of slip along the faults can be described byusing the classical models of faults, for example, from the LinearElastic Fracture Mechanics (LEFM).
For a simple elliptical and planar fault geometry, and for faults inan infinite medium (finite thickness of the crust or sedimentarybeds may affect faulting) LEFM suggests a linear dependence of theamount of slip on the fault size and the stress state along it(Eshelby, 1957; Udias, 1999; Schultz and Fossen, 2002;Gudmundsson, 2004; Xu et al., 2006). In the following, we willuse the model of elliptical fault proposed by Schultz and Fossen(2002):
uz2ð1� nÞUðεÞ
DsG
b ¼ 2ð1� nÞffiffiffiffiffiffipε
pUðεÞ
DsG
ffiffiffiS
p: (15)
u is the amount of slip along the fault, G and n are the shearmodulus and the Poisson ratio, and Ds is the shear driving stress onthe fault. S is the surface area of the fault or rupture plane, S ¼ pab,where a and b are the semimajor and semiminor axes, respectively.U(ε) is related to the shape of the faults:
UðεÞ ¼h1þ 1:464 ε
1:65i1 =
2
; (16)
and
ε ¼ ab: (17)
The relationship between the length of the fault and its surfaceis:
l ¼ 2a ¼ 2ffiffiffiffiε
p
r ffiffiffiS
p¼ c2
ffiffiffiS
p: (18)
The shear driving stress Ds on the fault is defined as the dif-ference between the component of the average remote shear stresss! ¼ T : s in the direction of movement m!, and the residualfrictional strength of the fault (e.g., after the seismic event),
mrsn ¼ mrN : s (e.g., Schultz and Fossen, 2002; �Zalohar and Vrabec,2010; �Zalohar, 2012):
Ds ¼��
T : s�$m!� mrN : s
�: (19)
Here, mr is the coefficient of residual friction, and sn is normalstress along the fault. In more sophisticated models of faultsdescribed by Schultz and Fossen (2002) the driving stress also ac-counts for yield strength in the end zone of the faults, which is,however, neglected in our discussion because of simplicity.
Based on Equations (15)e(18) we will write the following re-lations for the self-similar model of the elliptical fault:
u ¼ c1DsG
ffiffiffiS
p;
l ¼ c2ffiffiffiS
p;
u ¼ c1c2
DsG
l ¼ c3DsG
l;
l ¼ c4L;
u ¼ c3c4DsG
L:
(20)
It is important that the characteristic length L of the Earth’s crustas the Cosserat continuum is related to the size of the faults l. Faultsof various lengths, l, are associated with different characteristiclengths, L.
Now, we write the equation for geometric moment (Udias,1999):
M ¼ Su ¼ c1DsGS3=2;
M ¼ u3�c1DsG
�2 ¼ c1c32
DsGl3:
(21)
c1, c2, c3, and c4 are the geometric parameters accounting for thefault geometry and mechanical properties of the material:
c1 ¼ 2ð1� nÞffiffiffiffiffiffipε
pUðεÞ ;
c2 ¼ 2ffiffiffiffiε
p
r;
c3 ¼ ð1� nÞεUðεÞ :
(22)

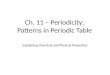
Fig. 4. Geometry of the optimal interacting system of faults in the classical (Cauchy)continuum (after �Zalohar, 2012). Faults are illustrated as great circles by using thelower hemisphere equal angle stereographic projection. The bold arrows represent thedirection and sense of slip along the faults, which are parallel to the common inter-section direction between the faults. The complete interacting system consists of twosubsystems (Fault subsystems A and B) symmetrically aligned with respect to the ki-nematic axes of the instantaneous deformation tensor u(S).
J. �Zalohar / Journal of Structural Geology 60 (2014) 30e4534
The c4 parameter will be calculated in the Discussion chapter.The c1 and c3 parameters depend on the shape of the faults, andwilltherefore be called the shape parameters. Fig. 2 illustrates thedependence of the c3 parameter on ε ¼ a/b.
In seismology, the seismic moment MS is used instead of thegeometric momentM, where MS ¼ GM, and G is the shear modulus(Udias, 1999). Taking, for example, the standard relation that relatesseismic moment to moment magnitude of the form (Udias, 1999):
m ¼ 23log10MS � f ; (23)
it follows:
MS ¼ e32bðmþf Þ ¼ e
32 bf e
32 bm: (24)
Here, b ¼ ln 10, and f is some numerical parameter. We will alsowrite the relationship between the amount of slip and the seismicmoment in the following form:
u ¼�c1DsG
�2=3M1=3S
G1=3 ¼ c2=31 Ds2=31Ge12 bf e
12bm: (25)
Because u¼ c3(Ds/G)l, we have similar relationships for the faultlength, l, and the characteristic length, L:
l ¼ c2=31c3
1Ds1=3
e12 bf e
12 bm;
L ¼ c2=31c3c4
1Ds1=3
e12 bf e
12bm:
(26)
4. Interaction between intersecting faults
�Zalohar and Vrabec (2010) numerically showed that the Cos-serat continuum theory spontaneously predicts the slip directionalong the faults to be parallel to their common intersection witheach other. In geomechanics, this type of faulting is known as thewedge failure (e.g., Markland, 1972; Goodman, 1976; Yoon et al.,2002), and is extensively studied in the analysis of the rock slopestability. Later, �Zalohar (2012) explored this prediction analyticallyand developed the Cosserat theory of the wedge faulting. Heshowed that the wedge faulting (Fig. 3) in the Cosserat continuumis a solution of the following equation:
Fig. 3. Schematic illustration of wedge faulting (simplified after Yoon et al., 2002; �Zalohar, 2(b). Faults are illustrated as great circles by using the equal angle lower hemisphere stereog
faults, which are parallel to the common intersection direction between the faults. l!
1, l!
2,
faults 1 and 2, f!- relative microrotation vector parallel to l
!2. In this case the relative micro
1.
�l1lT1 � T2
�: uðSÞ
p ¼ � f!rel
��l1l
n!1 � n!2
�: (27)
2 2
Here l1 and l2 are the lengths of interacting faults. There existnumerous mathematically possible solutions of this equation that,however, may not also have any physical sense. In the intersecting-faults interaction the two faults are associated with the commonmovement of the rock block along the common intersection line.Therefore, we can expect that the wedge faulting can only appearalong two intersecting faults of similar lengths, l1 z l2, while theabove Equation (27) was formulated for the completely arbitraryratio of fault lengths l1/l2. Natural observations also suggest that in
many cases the relative microrotation vector f!rel
is approximatelysubparallel to the intermediate kinematic axis of the instantaneous
012). (a) Sliding direction is parallel to the line of intersection between the two faults.raphic projection. The bold arrows represent the direction and sense of slip along the
l!
3- kinematic axes of the instantaneous deformation tensor, n!1, n!
2- unit normals to
rotation has the contra-clockwise direction around the l!
2 axis, which is marked with

Fig. 5. Geometry of the optimal interacting system depending on the relative microrotation frel (after �Zalohar, 2012). In the Cosserat continuum the optimal interacting subsystemsare not symmetrical, because the shear and the shear stress along the faults of the two optimal interacting subsystems do not have the same magnitude. Depending (1) on theorientations of the kinematic axes of the instantaneous strain tensor u(S), (2) on the sign of the relative microrotation, and (3) on the properties of the constitutive equation relatingthe stress and the strain, one of the interacting subsystems becomes dominant, while the other becomes weaker (cases (a) and (c)). The dominant subsystem accommodates a largeramount of deformation, because the resolved shear and shear stress along the faults of this subsystem are higher. For large relative microrotation, the faults of the weaker subsystem
cannot slip, and the total optimal interacting system consists of a single subsystem (cases (b) and (d)). frel0 is the critical relative microrotation, for which the weaker subsystem can
be active. The CCW directed relative microrotation around the l!
2 axis is marked with 1, while the CW directed relative microrotation around the l!
2 axis is marked with 5.
J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 35
macrostrain tensor uðSÞp , f
!relk l!
2 (e.g., Twiss and Unruh, 1998;�Zalohar and Vrabec, 2010; �Zalohar, 2012). In this case, the wedgefaulting can only appear along the faults that belong to the optimalinteracting fault system (�Zalohar, 2012; see also Figs. 4 and 5).In fact, we have two optimal subsystems of interacting faults. In theclassical continuum with symmetric stress and strain, theseoptimal interacting subsystems are also symmetric, accommoda-ting the same amount of deformation (Fig. 4). In the Cosseratcontinuum with asymmetric Cosserat strain, one of the optimalinteracting subsystem is dominant, accommodating a largeramount of deformation than the other, which is the weaker (Fig. 5).
5. Interaction between parallel faults
Faults in the Earth’s crust often appear as sets of subparallel faultshaving approximately the same orientation and the same directionof movement. A group of fault-sets with different orientation iscalled a fault system. Two neighboring parallel faults represent theboundary of a block of rock. Therefore, a movement of the blocknecessarily produces a movement along both parallel faults at theboundary of the block leading to the parallelefaults interaction.
Let the rock be cut by numerous faults, however, we onlyconsider interaction between two parallel faults of the lengths l1and l2 that split apart three Blocks A, B, and C (Fig. 6). The distancebetween the centers of the two interacting faults is D
!. The
perpendicular distance between the interacting faults is:
Rt ¼ D!$ n! ¼ D cos4: (28)
Rt is also a width of the Block B between both faults. We also
define the vector D!0
, which is a projection of the vector D!
on theplane defined by the vectors n! and m! (Fig. 6):
D!0 ¼ �
D!$ n!� n!þ �D!$m!�m!;
D!0
$ n! ¼ D!$ n! ¼ D
!0cosa ¼ D cos4:
(29)
We see from Fig. 7 that the elastic macrorotation of the con-tinuum due to the elastic strain is
fmacroe z
bRt
; (30)
where
b ¼
�T : s
�$m!
GRt: (31)
ðT : sÞ$m! is average remote shear stress in the direction ofmovement m!, and G is the shear modulus. We assume that b isdefined by the elastic strain boundary conditions. Note that theindex e in Equation (30) marks the macrorotation associated with

Fig. 8. Cosserat microrotation in the parallelefaults interaction. Vector D!0
0 represents
the elastically deformed state before the slip along the Faults 1 and 2. Vector D!00
0represents the deformed state after slip along the Faults 1 and 2. During the slip along
the Faults 1 and 2, the vector D!0
0 rotates to the final position, represented by the vector
D!00
0. The amount of elastic shear on this figure is much too high in order to indicate thechange in the relative position between the interacting faults. In a natural situation we
have D0zD00zD00
0. The angle between D!0
(undeformed state) and D!00
0 (final state) is the
final actual Cosserat microrotation of the Block B, fCosseratp . The angle between D
!00 and
D!00
0 is the final actual relative microrotation of the Block B, frelp . See text for details and
Figs. 5 and 6 for explanation of other mathematical symbols.
Fig. 6. Position of the aftershock or foreshock (Fault 2) with respect to the mainshock
(Fault 1). The two faults split apart three blocks of rock (Blocks A, B, and C). m! is unit
vector in the direction of slip; l1 and l2 are lengths of the interacting faults; n! is unit
normal to the Faults 1 and 2; D!
is distance between the interacting faults; D!0
is
projection of the vector D!
to the plane defined by the vectors m! and n! (xz-plane); Rtis the perpendicular distance between the interacting faults. Rt is also the width of the
Block B, and a projection of the vectors D!
and D!0
to the z-axis; a is angle between the
vectors D!0
and n!; 4 is angle between the vectors D!
and n!. See text for details.
J. �Zalohar / Journal of Structural Geology 60 (2014) 30e4536
the elastic deformation. From Fig. 8, we see that the elastic mac-rorotation of the Block B is:
fmacroeB z
b cosaD0 ¼ b cos2a
D cos4¼ b cos2a
Rt; (32)
which means that fmacroeB � fmacro
e . During slip along the Faults 1and 2, elastic deformation and macrorotation are transformed intothe faulting-related plastic deformation and the actual Cosserat
Fig. 7. Elastic macrorotation in the parallelefaults interaction. Far field strain boundary conddue to the elastic shear. C0 and C are the initial and final positions of the geometric cente
coordinate system of the Faults 1 and 2 (see Fig. 5). Initial position (undeformed state) of the
displaced to the new location D!’
0. This defines the elastic macrorotation fmacroeB of the Bloc
microrotation of the Block B. The Block B rotates back from fmacroeB to
fCosseratp , where index p marks the plastic deformation/micro-
rotation. Note that fCosseratp < fmacro
eB . Fig. 8 shows that the relativemicrorotation is
frelp ¼ fmacro
eB � fCosseratp z
u12cosaþ u2
2cosa
D0 ¼
¼ ðu1 þ u2Þ2Rt
cos2a:
(33)
itions define the translation of the Fault 2 for a distance b (with respect to the Fault 1)r of the Fault 2. This results in elastic macrorotation fmacro
e of the continuum in the
Fault 2 with respect to the Fault 1 is D!0
. During elastic strain, the center of the Fault 2 is
k B.

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 37
The Cosserat microrotation is then
Fig. 9. Type 1 parallelefaults interaction. The slip along both interacting faults issimultaneous. The center of microrotation, C, is within the Block B. The perpendiculardistance Rð1Þt is equal to L1/2 þ L2/2.
fCosseratp z
b� 12 ðu1 þ u2ÞRt
cos2a: (34)
This is a very important result, since Båth’s law can be deriveddirectly from the above equation. Physical importance of thisequation for the case of the parallelefaults interaction is equivalentto the importance of Equation (27) for the case of the intersecting-faults interaction.
The expressions for fmacroeB , frel
p , and fCosseratp in the equations
above and below are approximate, because the position D!0
of thesecond fault with respect to the first fault changes during the elasticstrain (Figs. 7 and 8).
5.1. Normalized distance between the mainshock and theaftershock
Following Tahir et al. (2012) we define the normalized distancebetween the mainshock and aftershock (or foreshock):
DD ¼ Dl1; (35)
and the normalized perpendicular distance is:
DDt ¼ Rtl1
¼ DD$cos4: (36)
Note that l1 is the length of the mainshock rupture plane. Wewill also define the expected angle 40 at which the distribution ofDD!
for a population of the interacting pairs has maximum (in thedirection DD
!*):
DD* ¼ DD*t
1cos40
¼ DD*tI4;
I4 ¼ 1cos40
:
(37)
We see thatDD!* �DD
!*
t. We assume that 40 depends on severalfactors, such as rock type, history of deformation, type of stressregime (compressional, strike-slip, extensional), stress field aroundinteracting faults, fault geometry (circular, elliptical, etc.). Forexample, if the aftershock is perfectly aligned with the center of themainshock rupture plane, the expected angle 40 ¼ 0 and I4 ¼ 1. Ifthe aftershock occurs at the tip of the rupture plane of the main-shock, 40 [ 0 and I4 [ 1.
5.2. Three possible types of parallelefaults interaction
Three types of parallelefaults interaction can be defineddepending on the position of the center of microrotation of the blockof rock between the interacting faults. In the following equations theindex 1 is always associated with the larger fault/earthquake(mainshock), while the index 2 is associated with the smaller fault/earthquake (foreshock or aftershock). Therefore, we have L1 � L2.
Type 1: In the progressive aseismic flow of rock the slip along theinteracting faults is simultaneous (Fig. 9). The center ofmicrorotationis positioned between the two interacting faults. Therefore, we have
Rð1Þt ¼ L12þ L2
2: (38)
Note that the distance between the center of microrotation andthe Fault 1 is L1/2, while the distance between the center ofmicrorotation and the Fault 2 is L2/2. The width of the Block Bbounded by the Faults 1 and 2 is thus L1/2 þ L2/2.
Type 2: In the seismic parallelefaults Type 2 interaction themovements along the Faults 1 and 2 are not simultaneous (Fig. 10).The movement along the Fault 1 is related to the translation andmicrorotation of the Blocks A and B. The movement along the Fault2 is related to the movement of the Blocks B and C. No movementappears along the Fault 1 during the movement along the Fault 2.
In the Type 2 the movement along the Fault 2 appears at thecenter of microrotation associated with the slip along the Fault 1.This means that the distance between the first and the second fault(and the width of the Block B) is defined by one half of the char-acteristic length L1:
Rð2Þt ¼ 12L1: (39)
Type 3: In the seismic parallelefaults Type 3 interaction themovements along the Faults 1 and 2 are not simultaneous (Fig. 11).Similar as in the Type 2, the movement along the Fault 2 is relatedto the movement of the Blocks B and C. No movement appearsalong the Fault 1 during the movement along the Fault 2.
In the Type 3, during the movement along the Fault 2 the centerof rotation of the Block B is positioned on the Fault 1, and the dis-tance between the first and the second fault (and the width of theblock B) is defined by one half of the characteristic length L2(Fig. 11):
Rð3Þt ¼ 12L2: (40)
6. Parallelewedges interaction
In the above discussion we have described Equation (27) for theintersecting-faults interaction. We have also derived Equation (34)describing the parallelefaults interaction. Both types of interactioncan appear simultaneously leading to the parallelewedgesinteraction.
For both, the dominant and the weaker optimal interacting sub-system in the intersecting-faults interactionwe have (�Zalohar, 2012):
f!rel
k l!
2;
dm! ¼ T1 : uðSÞ ¼ T2 : uðSÞ;
ð n!1 � n!2Þ k f!rel
;
(41)

Fig. 10. Type 2 parallelefaults interaction. Movements along the Fault 1 (mainshock) and the Fault 2 (aftershock or foreshock) are not simultaneous. The Fault 2 is positioned in the
center of macrorotation, C, associated with the movement along the Fault 1. The perpendicular distance between the interacting faults is Rð2Þt ¼ L1=2. During the movement alongthe Fault 2 the center of microrotation, C, is positioned within the Block B.
J. �Zalohar / Journal of Structural Geology 60 (2014) 30e4538
and, therefore (see Equation (27)):
�T1 � T2
�: uðSÞ ¼ � f
!rel� ð n!1 � n!2Þ ¼ 0: (42)
Note that l1 ¼ l2. Intersecting interaction between the faults ofthe optimal interacting subsystems does not define the magnitudeof the relative microrotation, because both the left- and the right-hand sides of the Equation (42) are equal to zero. The magnitudeof the field of relative microrotation is thus defined by some otherprocess, for example, by the parallelefaults interaction, Equation(33). Both types of fault interaction, when simultaneous, lead to theparallel movement of parallel block wedges (Fig. 12). This type offault interaction will be called the parallelewedges interaction. Inthis case the blocks of rock are bounded by four faults, say A, B, C,and D (Fig. 12). The first pair of intersecting faults, A and B, form thefirst interacting subsystem A&B. Both faults are assumed to haveapproximately the same length, lAz lB¼ lAB. Note that lA is length ofthe Fault A, lB is length of the Fault B, while lAB is length of theintersection line between the both faults. The intersecting faults Cand D form the second interacting fault subsystem C&D, wherelC z lD ¼ lCD. Here lC is length of the Fault C, lD is length of the FaultD, while lCD is length of the intersection line between the bothfaults. The intersecting-faults interactions between the Faults A andB, and C and D do not define the field of the relative microrotation.This is defined by the interaction between the both parallel sub-systems A&B and C&D by the parallelefaults interaction (Equation
Fig. 11. Type 3 parallelefaults interaction. Movements along the Fault 1 (mainshock) and theFault 1 the center of microrotation, C, is positioned within the Block C. During the movemen
the perpendicular distance between the both interacting faults is Rð3Þt ¼ L2=2.
(33)), where each of the subsystems is equivalent to a single faultwith the length lAB or lCD, and unit normaln!AB ¼ ð n!A þ n!BÞ=k n!A þ n!Bk or n!CD ¼ ð n!C þ n!DÞ=k n!C þ n!Dk.For the parallelewedges interaction we also assume n!AB ¼ n!CD.
It is, however, important that the slip is not necessarily seismicalong all faults of the two interacting parallelewedges. We mayhave situation, where the slip is seismic along two faults, forexample, the Faults A and D. Contrary, along the Faults B and C theslip is aseismic (not necessarily also simultaneous). The interactingFaults A and D are not parallel, but the parallelewedges interactionmight still be evident/identified from the parallel slip directionalong the both faults.
7. Derivation of Båth’s law
Equation (34) that describes the parallelefaults/wedges inter-action can be solved in different ways by using different models offaults. Here, we will use the simple model of LEFM proposed bySchultz and Fossen (2002), see Chapter 3. Note that in all subse-quent equations the index 1 is associated with the mainshock,while the index 2 is associated with the aftershock (or foreshock).Therefore, we have L1 � L2, l1 � l2, u1 � u2, and m1 � m2. We alsoassume the following:
1. Frictional properties of both interacting faults/wedges are equal,which also means that the coefficient of residual friction mr isequal for both faults/wedges.
Fault 2 (aftershock or foreshock) are not simultaneous. During the movement along thet along the Fault 2 the center of microrotation, C, is positioned on the Fault 1. Therefore,

Fig. 12. Parallelewedges interaction. The first pair of intersecting faults, A and B, formthe first intersecting (and interacting) subsystem A&B and define the shape of theWedge 1. The intersecting faults C and D form the second intersecting (and interacting)fault subsystem C&D and define the shape of the Wedge 2. Both faults of each inter-secting subsystem are assumed to have approximately the same length.
J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 39
2. The shear driving stress on both interacting faults/wedges isequal.
3. Geometry of both interacting parallel faults/wedges is equal,characterized by the same values of the c1, c2, c3, and c4parameters.
The movement along the faults appears due to a sudden seismicrelaxation of the elastic strain within the blocks bounded by thefaults. The initial amount of the Cosserat microrotation (before theseismic events along the Faults 1 and 2) is equal to the elasticmacrorotation of the Block B, Equation (32). This means that theinitial amount of relative microrotation is equal to zero. The finalamount of the actual Cosserat microrotation (after the movementsalong the Faults 1 and 2) can depend on several factors, such aselastic and plastic properties of the rock between the interactingfaults, shape of the fault planes, yield strength of the tip of thefaults, distance and relative position between the interacting faults,etc. Here, wewill use the simplest and themost basic model, wherethe final amount of the actual Cosserat microrotation only dependson the residual friction along the faults:
fCosseratp ¼ mrN : s
G: (43)
From Equations (31), (34) and (43) we get:
12u1 þ
12u2 ¼ Rt
G
��T : s
�$m!� mrN : s
�¼ Rt
GDs: (44)
In the aseismic flow of rock (Type 1 parallelefaults/wedgesinteraction) we have u1 ¼ c3c4(Ds/G)L1, u2 ¼ c3c4(Ds/G)L2, and
Rð1Þt ¼ L1=2þ L2=2. Putting this into Equation (44),
u1=2þ u2=2 ¼ Rð1Þt Ds=G, it follows:
c3c4 ¼ 1: (45)
In the Type 2 interaction, we also have u1 ¼ c3c4(Ds/G)L1,
u2 ¼ c3c4(Ds/G)L2, but this time Rð2Þt ¼ L1=2. Putting this into
Equation (44), u1=2þ u2=2 ¼ Rð2Þt Ds=G, it follows:
l2l1
¼ L2L1
¼ 1c3c4
� 1 ¼ B � 1: (46)
A similar equation can also be derived for the Type 3 interaction.
Here we have Rð3Þt ¼ L2=2 and u1=2þ u2=2 ¼ Rð3Þt Ds=G. It follows:
l1l2
¼ L1L2
¼ 1c3c4
� 1 ¼ B � 1: (47)
Wewill term B as the Båth’s parameter. Its value defines the typeof the parallelefaults/wedges interaction. When B < 1, we have theType 2 interaction. The aftershock (or foreshock) appears at thecenter of microrotation associated with the mainshock. The dis-tance between the mainshock and the aftershock (or foreshock) isdefined by the half of the characteristic length of the mainshock,L1/2. When B > 1, we have the Type 3 interaction. The distancebetween the mainshock and the aftershock (or foreshock) isdefined by the half of the characteristic length of the aftershock(or foreshock), L2/2. The center of microrotation associated with theaftershock (or foreshock) is positioned on the fault plane of themainshock. For B equal to 1 both interacting faults are of the samelengths, and the Type 2 interaction is equivalent to the Type 3interaction. This case is similar to the “usual” Cosserat models,however, the distance between the faults bounding the blocks is L/2instead of L, and the slip along the faults is not simultaneous. Wecan conclude the following:
Type 2;l1l2
¼ 1B; DDð2Þ
t ¼ Rð2Þt
l1¼ L1
2l1¼ 1
2c4;
Type 3;l1l2
¼ B; DDð3Þt ¼ Rð3Þt
l1¼ L2
2l1¼ 1
2c4B:
(48)
If the slip is seismic, the ratio l1/l2 can be translated into thelanguage of the magnitudes of the associated earthquakes. FromEquation (26) we get:
l1l2
¼ e12 bðm1�m2Þ ¼ 10
12 ðm1�m2Þ: (49)
It follows that for the Type 2 interaction we have:
m1 �m2 ¼ 2 log10ð1=BÞ; (50)
and for the Type 3 interaction we have:
m1 �m2 ¼ 2 log10ðBÞ: (51)
We have derived Båth’s law. The above results suggest that thelengths ratio l1/l2 and the difference in magnitudes m1 � m2 in theparallelefaults/wedges interaction are scale-independent and fixedby (1) the shape of the faults (parameter c3), and (2) the ratio c4between the rupture length l and characteristic length L.
7.2. Spatial extension of Båth’s law
In Equation (48) we have also derived an extension of Båth’s lawto the normalized perpendicular distance between the mainshockand aftershock (or foreshock):
DDð2;3Þt ¼
8>>><>>>:
12c4
for Type 2;
12c4B
for Type 3:(52)
The normalized perpendicular distance DDt does not dependon the mainshock magnitude.

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e4540
7.2. Temporal extension of Båth’s law
The calculation of incremental strain due to faulting in a regionhas been solved by Kostrov (1974) and Molnar (1983) in seismo-logical studies of earthquakes, using seismic moment tensor sum-mation. In the Cosserat theory, the net result of slip along multipleslip-systems (faults, fractures, dislocations) is plastic Cosserat strain(e.g., Forest et al., 1997):
_ep ¼XNk¼1
_gkmkz1
DTðL=2ÞXNk¼1
ukmk; (53)
where _gkzuk=DTðL=2Þ is the rate-of-strain associated with the k- thslip-system (fault/earthquake). In the above equation DT is the time
period of deformation, and mk ¼ mðkÞij ¼ m!k5 n!k is the unit
moment tensor. In the parallelefaults/wedges interaction we onlyhave two faults/wedges, therefore it follows:
_epz1
DTðL=2Þ ðu1m1 þ u2m2Þ ¼
¼ 1DTðL=2Þ c3c4
DsG
ðL1 þ L2Þ$m:
(54)
Note that m1 ¼ m2, because the interacting faults/wedges areparallel and the direction of slip along them is also parallel. L/2 iswidth of the Block B (Fig. 6), and DT is difference between the timeof the mainshock and the aftershock (or foreshock). This equationcan be written in the context of the third invariants (determinants)of the tensors m and _ep
�det�_ep��1=3
z1
DTðL=2Þ c3c4DsG
ðL1 þ L2Þ$ðdetðmÞÞ1=3: (55)
Expressing DT leads to:
DTz2Lc3c4
DsG
ðL1 þ L2Þ$ detðmÞdet�_ep�!1=3
: (56)
In the Type 2 parallelefaults/wedges interaction the width ofthe Block B is L1/2, while in the Type 3 parallelefaults/wedgesinteraction the width of the Block B is L2/2. In the first case wetake L ¼ L1, while in the second we take L ¼ L2. Having in mind thatB ¼ 1/c3c4�1, we derive the result which is independent of the typeof the parallelefaults/wedges interaction:
DTð2;3Þz2DsG
detðmÞdet�_ep�!1=3
(57)
We see that the difference between the time of the mainshockand the aftershock (or foreshock) is independent of the mainshockmagnitude, characteristic length of the Cosserat continuum andgeometry of the interacting faults (c3 and c4 parameters), but itdepends on the rate-of-Cosserat strain and on the shear drivingstress on the interacting faults.
8. Discussion and numerical testing of the theory
8.1. Physical origin of Båth’s law
In this article, we have shown that attempts to explain the originof Båth’s law based on purely statistical approach (as discussed inthe Introduction chapter) are not sufficient if these methods ignoreearthquake physics and basic mechanical properties of the con-tinuum. Båth’s law is not simply a consequence of basic statistical
features of aftershock sequences e there exists an additionalphysical mechanism which represents the basis for this law. Wehave shown that Båth’s law is related to the Cosserat translationsand microrotations of blocks bounded by the faults, and to thegeometry of these blocks. Cosserat translations and microrotationsof the blocks of rock result in correlation and interaction betweenthe movements along all the faults that represent the boundary ofthe blocks involved. The Cosserat theory of fault interactions pre-dicts three possible types of interaction; (1) intersecting-faultsinteraction, (2) parallelefaults interaction, and (3) parallelewedges interaction. Båth’s law is a direct consequence of the par-allelefaults and parallelewedges interactions.
Our theory also suggests that the mechanism of parallelefaultsand parallelewedges interaction leads to three possible types ofmainshock-aftershock (or foreshock-mainshock) interaction, whichdepends at least on three main factors; (1) the shape/geometry offaults which is related to the value of the shape parameter c3, (2)the ratio c4 between the rupture length l and characteristic length Lof the Cosserat continuum, and (3) on the position of the center ofmicrorotation of the block between the both interacting faults/wedges. In the aseismic Type 1 parallelefaults/wedges interaction,the center of microrotation is positioned between the both inter-acting faults or wedges. The movement along both faults/wedgesappears simultaneously. In seismic interactions, however, the slipalong both interacting faults/wedges is not simultaneous. In theType 2, the mainshock is related to the rotation around the faultplane of the aftershock (or foreshock). The aftershock (or foreshock)occurs in the center of the rotation associated with the mainshock.In the Type 3 the aftershock (or foreshock) is related to the rotationaround the fault plane of the mainshock. The fault plane of themainshock is positioned in the center of the rotation associatedwith the aftershock (or foreshock).
Båth’s law is only related to the seismic interactions and doesnot appear in aseismic Type 1 interactions. The seismic Type 2 andType 3 interactions, however, depend on the value of Båth’sparameter, B ¼ 1/c3c4 � 1, where the shape parameter c3 dependson the geometry of the interacting faults, and c4 parameter relatesthe length of the fault l to the characteristic length L of the Cosseratcontinuum. When the interacting faults are of different sizes, thevalue of the Båth’s parameter is also different from 1. A value of Blower than 1 only allows for the Type 2 parallelefaults/wedgesinteraction. A value of B larger than 1 only allows for the Type 3parallelefaults/wedges interaction. For value B equal to 1, bothinteracting faults are of the same lengths, and the Type 2 interac-tion is equivalent to the Type 3 interaction. This case is similar tothe “usual” Cosserat models, however, the distance between thefaults bounding the blocks is L/2 instead of L.
The mechanisms of the Type 2 or Type 3 parallelefaults/wedgesinteractions also lead (1) to the spatial extension of Båth’s law to thenormalized perpendicular distance DDt between the mainshockand aftershock (or foreshock and mainshock), and (2) to the tem-poral extension of Båth’s law to the difference DT between the timeof the mainshock and the aftershock (or foreshock and mainshock).The spatial extension states that the normalized perpendiculardistance DDt is independent of the mainshock magnitude. Both,Dm and DDt are defined by the Båth’s parameter B and the ratio c4between the rupture length l and characteristic length L of theCosserat continuum. The temporal extension of Båth’s law statesthat also DT does not depend on the mainshock magnitude.
8.2. Empirical data on Båth’s law
Thirty years of the USGS Global Earthquake Catalog (1973e2010, http://earthquake.usgs.gov) allowed Tahir et al. (2012) toextend Båth’s law (1) to space and time patterns of the largest

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 41
aftershocks, and (2) to consider the earthquake faulting style as apossible control parameter on size and location of the largestaftershock. To do this, they explored DT ¼ Tm � Ta (Tm is main-shock time, Ta is largest aftershock time) and DD ¼ D/l1normalized distance between the largest aftershock and main-shock epicenters. Using the USGS Global Earthquake Catalog theyinvestigated the density distributions of size, time and spacepatterns of aftershocks, and showed that Dm (in the surfacemagnitude scale), DT, and DD values are independent of main-shock magnitude. Thus, the spatial and temporal extensions ofBåth’s law, DD ¼ const. and DT ¼ const., were confirmed from theGlobal Earthquake Catalog.
Furthermore, Tahir et al. (2012) discovered that Dm and DD arefunctions of earthquake faulting styles, as defined according tomainshock rake angle. The focal mechanism solutions were takenfrom the global Harvard CMT catalog, (http://earthquake.usgs.gov/earthquakes/eqarchives/sopar/), 1977e2010. Because of the insuf-ficient number of large normal events that satisfy all necessarystatistical requirements, they restricted the analysis to the strike-slip and reverse faulting earthquakes. The authors discovered thatthe average Dm value for strike-slip events (Dms ¼ 1.51) is largerthan for the reverse events (Dmr ¼ 0.95). They have also found thaton average Dms � Dmr ¼ 0.24. Accordingly, the strike-events pro-duce smaller aftershocks than the reverse events. Similar behaviorwas found by Tahir et al. (2012) for the DD distribution. This dis-tribution is strongly peaked up at DD*¼0.2, with mode values forDD*
s > DD*r , where DD*
s ¼ 0:22 for strike-slip events andDD*
r ¼ 0:11 for reverse-events. Accordingly, the largest aftershocksof strike-slip mainshocks are on average smaller than and occur at alarger distance from the mainshock than those triggered by reverseshocks.
8.3. Verifying the theory
The results of Tahir et al. (2012) present a starting point to testthe theory of fault interactions and Båth’s law developed in thispaper. If our theory is reliable, then it must explain the followingcharacteristics of the mainshock-aftershock interactions observedby Tahir et al. (2012) from the Global Earthquake Catalog:
1. The theory should explain at least two maxima in the Dm andDD distributions.
2. It must predict the correct values of the expected angle 40. Theresults should be in agreement with empirical observationswhich show that most strike-slip aftershocks epicenters areobserved to be clustered at the fault edges of the rupture planeof themainshock. They are at larger distance andmore clusteredthan the rough plateau density of reverse aftershocks epicenterswhich are located within the hanging wall of the mainshockrupture plane (King et al., 1994; Stein, 1999; Freed, 2005). FromEquation (37) this means that for reverse events 4
ðrÞ0 z0, while
for strike-slip events 4ðsÞ0 [0.
3. The theory should be in agreement with the empirical obser-vations which show that the difference DT between the time ofthe mainshock and the aftershock is independent of themagnitude of the mainshock.
The temporal extension of Båth’s law is least problematic. It wasconfirmed from the Global Earthquake Catalog by Tahir et al.(2012). Their empirical observations are in agreement with Equa-tion (57), which indicates that DT is independent of the mainshockmagnitude, type of faulting, type of seismic parallelefaults/wedgesinteraction and geometry of the interacting faults (the c3 param-eter), and the ratio between the length of the rupture plane and thecharacteristic length of the Cosserat continuum (the c4 parameter).
According to Equation (57), DT only depends on the rate-of-Cosserat strain and the shear driving stress on the faults.
Explaining the empirical observations by Tahir et al. (2012) forthe Dm and DD distributions needs much greater caution.
First, it is important that Tahir et al. (2012) assumed the spatialextension of Båth’s law to DD distribution, while, in fact, Equation(52) represents the extension of Båth’s law to the projection of thedistance between the interacting faults on the unit normal of thefaults, DDt (normalized perpendicular distance). Following Equa-tion (37), the spatial extension of Båth’s law to DD distribution canbe defined in the following way:
DDð2;3Þ ¼ I4DDð2;3Þt ; (58)
with I4 > 1.Second, it is also important that observations by Tahir et al.
(2012) were obtained using the surface magnitude scale. Our cal-culations, however, are based on the moment magnitude scale,Equation (23). Scordilis (2006) derived globally valid empiricalrelations to convert magnitudes expressed in widely used magni-tude scales to equivalent moment magnitude. He defined relationsconnecting the surface wave magnitude ms with the momentmagnitude m for earthquakes with foci not exceeding a depth of70 km. He showed that for strong earthquakes (6.2 � ms � 8.2)these magnitude scales are:
m ¼ 0:99ð � 0:02Þms þ 0:08ð � 0:13Þ; (59)
while for weaker events (3.0 � ms � 6.1) the m values are:
m ¼ 0:67ð � 0:005Þms þ 2:07ð � 0:03Þ: (60)
Because Tahir et al. (2012) confined their analysis to shallowearthquakes (depth less than 70 km) and to large earthquakes, withthe surface magnitude larger than 7, their results can be directlyused to test our equations. According to Scordilis (2006), for largeearthquakes the surface and moment magnitude scales are prac-tically equivalent, Equation (59).
Based on our model, different maxima in the Dm and DD dis-tribution can be related to different geometry of natural faults(related to the shape parameter c3) and/or different value of the c4parameter in strike-slip and reverse events. Strike-slip and reverseevents can interact either by the Type 2 or Type 3 interactions. In allcases, we can calculate the values of the c3 and c4 parameters, andthe value of the expected angle 40. Physically, the mainshocks-aftershocks most probably interact by the Type 3 interaction,because in this case the microrotation during the aftershock isaround the existing fault-plane of the mainshock. This is morelikely than the case of the Type 2 interaction, where during themainshock the microrotation is around the fault-plane of the futureaftershock, which does not need to be defined or (already) formedduring the mainshock. In addition, results obtained assuming thatfaults/wedges interact by the Type 2 interaction are numericallyhighly unstable and depend significantly on small perturbations ofthe c3 and c4 parameters. Therefore, in our simple solution ofEquation (34) we assume the following:
1. On average faults/wedges interact by the Type 3 interaction.2. The rocks are a Poisson solid, n ¼ 0.25.3. For reverse events the expected angle 4
ðrÞ0 z00, because these
events are characterized by plateau density of aftershocks epi-centers located within the hanging wall of the mainshockrupture plane.
4. The parameter c4 is equal for both (all) types of events, becausethis is a parameter of the material.

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e4542
5. The frictional properties of interacting faults are equal (seeEquation (43)).
6. The shear driving stress on interacting faults is equal.7. The shape parameter c3 for two interacting faults is equal, which
means that the geometry of both faults/wedges is equal, seeEquations (45)e(47).
8. We, however, propose different values of the shape parameterscðsÞ3 and cðrÞ3 for the strike-slip and reverse events, respectively.
First, according to the empirical observations by Tahir et al.(2012), for strike-slip events we have
Dms ¼ 2 logBs ¼ 1:51;
DD*s ¼ IðsÞ4
2c4Bs¼ 0:22:
(61)
From the first equation we get Bs ¼ 5.69 and
c4 ¼ IðsÞ4
2DD*sBs
¼ 0:401
cos4ðsÞ0
: (62)
From Equation (46) it follows
cðsÞ3 ¼ 2DD*sBs
IðsÞ4 ð1þ BsÞ¼ 0:37$cos4ðsÞ
0 : (63)
In similar manner, for reverse events we have
Dmr ¼ 2 logBr ¼ 0:95;
DD*r ¼ IðrÞ4
2c4Br¼ 0:11:
(64)
From the first equation we get Br ¼ 2.99 and
c4 ¼ IðrÞ4
2DD*r Br
¼ 1:521
cos4ðrÞ0
: (65)
From the Equation (46) it follows
cðrÞ3 ¼ 2DD*r Br
IðrÞ4 ð1þ BrÞ¼ 0:165$cos4ðrÞ
0 : (66)
Assuming 4ðrÞ0 z00 leads to
Fig. 13. Expected angle 40 in the Type 3 parallelefaults interaction for the case whenthe Fault 2 is perfectly aligned with the tip of the Fault 1. The tip of the Fault 1 rep-resents the center of rotation, C, associated with the movement along the Fault 2.
c4 ¼ 1:52zp
2: (67)
Equalizing Equations (62) and (65), we also get:
4ðsÞ0 z750: (68)
Fig. 13 illustrates the geometry of the interacting strike-slipfaults when alignment of the aftershock is just perfect withrespect to the tip of the mainshock rupture plane. The perpendic-
ular distance Rð3Þt between the aftershock and mainshock ruptureplanes is L2/2. The distance from the center of the mainshockrupture plane to its tip is (c4/2)L1. For strike-slip events, the ratio L1/L2 is equal to Bs¼5.69, Equation (47). From Fig. 13 we see
tan4ðsÞ0 ¼ c4
L1L2
¼ c4Bs: (69)
Therefore, we get 4ðsÞ0 z830, which is roughly in agreement with
the above result, 4ðsÞ0 z750. This suggests that in the strike-slip
events the tip of the mainshock rupture plane represents the cen-ter of rotation associated with the aftershock.
Now, we can calculate the values of the shape parameter c3 andε ¼ a/b for strike-slip and reverse events, respectively (Equations
(63) and (66)). Having in mind that 4ðrÞ0 z0 and 4
ðsÞ0 z750, we have
cðsÞ3 ¼ 0:10 for strike-slip events, while for the reverse events we
have cðrÞ3 ¼ 0:165. These differences may be related to differentaverage shape of the strike-slip events compared to the reverseevents. From the LEFM model, Equations (15)e(22), and Fig. 2, wesee that the rupture plane in strike-slip events is on average moreelliptical than in reverse events. For strike-slip events we haveε(s) z 2.59, while for reverse events we have ε
(r) z 1.95.In summary, the theoretical model for Båth’s law described in
this article can successfully explain empirical observations by Tahiret al. (2012), assuming (1) that on average the interactingmainshocks-aftershocks in the Earth’s crust interact by the Type 3parallelefaults/wedges interaction, (2) the parameter c4 that re-lates the length of the fault to the characteristic length of theCosserat continuum is equal in all types of events, because it is aparameter of the material, (3) the geometry of the rupture (fault)plane is similar in mainshock and aftershock but differs in strike-slip events and reverse events. The model presented in thisarticle explains three most important empirical observations byTahir et al. (2012): (1) Båth’s law for the Dm distribution, (2) thespatial extension of Båth’s law to the normalized distance DD be-tween the mainshock and aftershock, and (3) the temporal exten-sion of Båth’s law to the difference DT between the time of themainshock and the aftershock. DT does not depend on the main-shock magnitude but on the rate-of-Cosserat strain and on theshear driving stress on the interacting faults. From the value of thec4 parameter that was calculated combining our theoretical modeland empirical observations by Tahir et al. (2012) it is possible tomodel the dependence of the Dm and DD values in Båth’s law andits spatial extension on the geometry of interacting faults, which isdefined by the shape parameter c3 and/or the ratio between thesemimajor and semiminor axes, ε ¼ a/b. The results are illustratedin Figs. 14 and 15.
8.4. Limitations and possible future developments of the Cosseratmodel for Båth’s law
The model for Båth’s law described in this article is simple andvery basic. In this model, the value of the difference between themagnitudes of the interacting earthquakes is defined only by (1)

Fig. 15. a) The dependence of the Dm value in Båth’s law on the ratio ε ¼ a/b betweenthe semimajor and semiminor axes of elliptical fault; b) The dependence of the DD*
value in the spatial extension of Båth’s law on the ratio ε ¼ a/b between the semimajorand semiminor axes of elliptical fault. All results are for the Type 3 parallelefaults/wedges interaction.
Fig. 14. a) The dependence of the Dm value in Båth’s law on the shape parameter c3; b)The dependence of the DD* value in the spatial extension of Båth’s law on the shapeparameter c3. All results are for the Type 3 parallelefaults/wedges interaction.
J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 43
the fault plane geometry (circular, elliptical, etc.), and (2) the ratioc4 between the rupture length l and characteristic length L of theCosserat continuum. This solution of the Equation (34) (that de-scribes the parallel faults/wedges interaction) is by no means theonly possible one. In the future more sophisticated models could bedeveloped also accounting for other more complex models of faultsproposed by LEFM (e.g., Martel, 1999; Schultz and Fossen, 2002;Schultz et al., 2006). These models also account for the frictionalstrength of the faults and yield strength in the end zone of the faultsor fractures. We could also propose models for Båth’s law thatwould assume different geometry and frictional properties of themainshocks and aftershocks (or foreshocks andmainshocks). In oursimplified model for Båth’s law we have proposed a similar (ellip-tical) geometry of both interacting faults/wedges, which is anobvious simplification. We can expect that the Dm and DD values inBåth’s law can be highly variable, especially in the regions withnonhomogeneous structure. Nonetheless, overall validity of Båth’slaw at the global scale (e.g., Vere-Jones, 1969; Shcherbakov andTurcotte, 2004; Saichev and Sornette, 2005; Kisslinger and Jones,1991; Console et al., 2003; Helmstetter and Sornette, 2002;Lombardi, 2002) suggests that in most regions the mechanicalproperties of interacting faults/wedges in the Earth’s crust as aCosserat continuum are very similar.
If the theory presented in this article is correct, it could beimportant to the general public, because it predicts characteristicsof the spatial and temporal relations between the interactingmainshocks and aftershocks (or foreshocks and mainshocks). In
this article we only calculated the shape andmaterial parameters c3and c4 for interacting mainshock-aftershock sequences based onthe empirical observations by Tahir et al. (2012). For the systems ofinteracting foreshocks-mainshocks these parameters could havedifferent values, which would also lead to different values of theBåth’s parameter. Studying detailed properties of both (1) theinteracting foreshock-mainshock systems and (2) mainshock-aftershock systems could potentially be significant for the earth-quake forecasting science. It may also be possible to relate theCosserat theory of fault interactions to the theory of Guttenberg-Richter’s law and Omori’s law, and to the ETAS models.
9. Conclusions
1. Båth’s law is a consequence of fault interactions in the Earth’scrust which behaves as a Cosserat continuum. Interaction be-tween earthquakes/faults is a direct consequence of the Cosserattranslations and microrotations of individual blocks of rock,which produces coherent sliding on all faults that represent theboundary of the translating and rotating blocks.
2. The model presented in this article can be used for both theinteracting foreshock-mainshock and mainshock-aftershocksystems. The symmetry of the equations is preserved.

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e4544
3. Three types of fault interactions can be described within theframe of the Cosserat theory; (1) intersectingefaults interaction(wedge faulting), (2) parallelefaults interaction, and (3) paral-lelewedges interaction.
4. In the simultaneous aseismic sliding along two parallel inter-acting faults/wedges (Type 1 parallelefaults/wedges interac-tion) the center of rotation is positioned between the bothinteracting faults/wedges. In the seismic interactions, however,one fault/wedge is positioned in the center of microrotationassociated with the movement along the other fault/wedge. Wehave two mechanically possible types of the seismic parallelefaults/wedges interaction. In the Type 2, the mainshock isrelated to the rotation around the fault plane of the aftershock(or foreshock). The aftershock (or foreshock) occurs in the centerof the rotation associated with the mainshock. In the Type 3, theaftershock (or foreshock) is related to the rotation around thefault plane of the mainshock. The fault plane of the mainshock ispositioned in the center of the rotation associated with theaftershock (or foreshock).
5. All types of the fault interactions are solutions of Equation (27)(describing the intersecting-faults interaction) and Equation(34) (describing the parallelefaults/wedges interaction). Båth’slaw is related to the seismic Type 2 and Type 3 parallelefaultsand parallelewedges interactions. Equation (34) can be solvedin various ways by using more or less sophisticated models offaults. In this article, we only derive the simplest solutionassuming that frictional properties and geometry of bothinteracting faults/wedges are equal.
6. Our model explains three most important empirical observa-tions by Tahir et al. (2012) from the USGS Global EarthquakeCatalogue: (1) Båth’s law for the distribution of the differenceDm between themagnitudes of themainshocks and aftershocks,(2) the spatial extension of Båth’s law to the normalized distanceDD between the mainshocks and aftershocks, and (3) the tem-poral extension of Båth’s law to the difference DT between thetime of the mainshocks and the aftershocks. Dm, DD, and DTdistributions are all independent of the mainshock magnitude.
7. The difference DT between the time of the mainshock and theaftershock (or foreshock) is independent of the mainshockmagnitude, the type of faulting, the type of the seismic parallelefaults/wedges interaction, characteristic length of the Cosseratcontinuum and geometry of the interacting faults, but it de-pends on the rate-of-Cosserat strain and on the shear drivingstress on the interacting faults.
8. In the simple and very basic model of Båth’s law presented inthis article, the maxima in the Dm and DD distribution in theUSGS Global Seismic Catalogue can be explained: (1) assumingthat on average the faults/wedges interact by the Type 3 inter-action, and (2) as the consequence of different fault geometry instrike-slip and reverse events. Based on LEFM it is possible toconclude that on average the strike-slip events appear alongmore elliptical faults than the reverse events.
Acknowledgements
First, I would like to thank the editor Thomas Blenkinsop for histhorough editorial handling and a goodwill to improve and publishthe manuscript. I am also very grateful to two anonymous re-viewers who performed a very detailed review of the manuscriptand contributed many constructive comments and ideas that hel-ped to improve its quality. The author also greatly appreciatesmanyuseful comments given by professor Will Tomford, who helped toimprove the language of the manuscript.
References
Båth, M., 1965. Lateral inhomogeneities in the upper mantle. Tectonophysics 2,438e514.
Besdo, D., 1974. Ein Beitrag zur nichtlinearen Theorie des Cosserat-Kontinuums.Acta Mech. 20, 105e131.
Besdo, D., 1985. Inelastic behavior of plane frictionless block-systems described asCosserat media. Arch. Mech. 37, 603e619.
Console, R., Lombardi, A.M., Murru, M., Rhoades, D., 2003. Båth’s law and the self-similarity of earthquakes. J. Geophys. Res. 108 (B2), 9. http://dx.doi.org/10.1029/2001JB001651.
de Borst, R., 1991. Simulation of strain localization: a reappraisal of the Cosseratcontinuum. Eng. Comput. 8, 317e332.
de Borst, R., 1993. A generalization of J2-flow theory for polar continua. Comput.Methods Appl. Mech. Eng. 103, 347e362.
Eshelby, J.D., 1957. The determination of the elastic field of an ellipsoidal inclusion,and related problems. Proc. Royal Soc. Lond. 241 (1226), 376e396. http://dx.doi.org/10.1098/rspa.1957.0133.
Etse, G., Nieto, M., 2004. Cosserat continua-based micro plane modeling. Theoryand numerical analysis. Lat. Am. Appl. Res. 34, 229e240.
Faulkner, D.R., Jackson, C.A.L., Lunn, R.J., Schlische, R.W., Shipton, Z.K.,Wibberley, C.A.J., Withjack, M.O., 2010. A review of recent developments con-cerning the structure, mechanics and fluid flow properties of fault zones.J. Struct. Geol. 12, 1557e1575.
Figueiredo, R.P., Vargas, E.A., Moraes, A., 2004. Analysis of bookshelf mechanismsusing the mechanics of Cosserat generalized continua. J. Struct. Geol. 26, 1931e1943.
Forest, S., 2000. Cosserat Media. In: Buschow, K.H.J., Cahn, R.W., Flemings, M.C.,Ilschner, B., Kramer, E.J., Mahajan, S. (Eds.), Encyclopedia of Materials: Scienceand Technology. Elsevier Science Ltd, pp. 1715e1718.
Forest, S., Sievert, R., 2003. Elastoviscoplastic constitutive frameworks for general-ized continua. Acta Mech. 160, 71e111.
Forest, S., Cailletaud, G., Sievert, R., 1997. A Cosserat theory for elastoviscoplasticsingle crystals at finite deformation. Arch. Mech. 49, 705e736.
Forest, S., Barbe, F., Cailletaud, G., 2000. Cosserat modeling of size effects in themechanical behavior of polycrystals and multi-phase materials. Int. J. SolidsStruct. 37, 7105e7126.
Forest, S., Pradel, F., Sab, K., 2001. Asymptotic analysis of Heterogeneous CosseratMedia. Int. J. Solids Struct. 38, 4585e4608.
Freed, A., 2005. Earthquake triggering by static, dynamic, and postseismic stresstransfer. Annu. Rev. Earth Planet. Sci. 33, 335e367.
Goodman, R.E., 1976. Methods of Geological Engineering in Discontinuous Rocks.West Publishing, San Francisco.
Gudmundsson, A., 2004. Effects of Young’s modulus on fault displacement. C.R.Geosci. 336, 85e92.
Hansen, E., Willam, K., Carol, I., 2001. A two-surface anisotropic damage/plasticitymodel for plain concrete. In: de Borst, R. (Ed.), Proocedings of Framos-4 Con-ference Paris, May 28e32, 2001, Fracture Mechanics of Concrete Materials. A.A.Balkema, Rotterdam, pp. 549e556.
Helmstetter, A., Sornette, D., 2002. Diffusion of epicenters of earthquake after-shocks, Omori’s law, and generalized continuous-time random walk models.Phys. Rev. E 6606 (6 Part 1), 1104. http://dx.doi.org/10.1103/PhysRevE.66.061104.
Helmstetter, A., Sornette, D., 2003. Båth’s law derived from the Guttenberg-Richterlaw and from Aftershock Properties. Geophys. Res. Lett. 30 (2069), 4. http://dx.doi.org/10.1029/2003GL018186.
Ilcewicz, L.B., Narasimhan, M.N.L., Wilson, J.B., 1968. Micro and macro materialsymmetries in generalized continua. Int. J. Eng. Sci. 24, 97e109.
Kessel, S., 1964. Lineare Elastizitätstheorie des anisotropen Cosserat-Kontinuums.Abh. Braunscheigschen Wiss. Ges. 16, 1e22.
King, G., Stein, R., Lin, J., 1994. Static stress changes and the triggering of earth-quakes. Bull. Seismol. Soc. Am. 84 (3), 935e953.
Kisslinger, C., 1996. Aftershocks and fault-zone properties. Adv. Geophys. 38, 1e36.Kisslinger, C., Jones, L.M., 1991. Properties of aftershock sequences in Southern
California. J. Geophys. Res. 96 (B7), 11947e11958. http://dx.doi.org/10.1029/91JB01200.
Kostrov, V.V., 1974. Seismic moment and energy of earthquakes, and seismic flow ofrocks. Izvestiya Acad. Sci. USSR (Phys. Solid Earth) 1, 23e40.
Lippmann, H., 1969. Eine Cosserat e Theorie des Plastischen Fliens. Acta Mech. 8,255e284.
Lombardi, A.M., 2002. Probabilistic interpretation of “Båths law”. Ann. Geophys. 45(3/4), 455e472.
Manzari, M.T., 2004. Application of micropolar plasticity to post failure analysis ingeomechanics. Int. J. Numer. Anal. Methods Geomech. 28, 1011e1032.
Markland, J.T., 1972. A Useful Technique for Estimating the Stability of Rock Slopeswhen the Rigid Wedge Sliding Type of Failure Is Expected. Imperial CollegeRock Mechanics Research Report 19.
Martel, S.J., 1999. Mechanical controls on fault geometry. J. Struct. Geol. 21, 585e596.
Mohan, L.S., Nott, P.R., Rao, K.K., 1999. A frictional Cosserat model for the flow ofgranular materials through a vertical channel. Acta Mech. 138, 75e96.
Molnar, P., 1983. Average regional strain due to slip on numerous faults of differentorientations. J. Geophys. Res. 88, 6430e6432.

J. �Zalohar / Journal of Structural Geology 60 (2014) 30e45 45
Mühlhaus, H.-B., Vardoulakis, J., 1987. The thickness of shear bands in granularmaterials. Géotechnique 37, 271e283.
Nanjo, K.Z., Enescu, B., Shcherbakov, R., Turcotte, D.L., Iwata, T., Ogata, Y., 2007.Decay of aftershock activity for Japanese earthquakes. J. Geophys. Res. 112(B08309), 12. http://dx.doi.org/10.1029/2006JB004754.
Saichev, A., Sornette, D., 2005. Distribution of the largest aftershocks in branchingmodels of triggered seismicity: theory of the universal Båth’s law. Phys. Rev. E71, 11, 056127 2005 056127-4.
Salari, M.R., Saeb, S., Willam, K., Patchet, S.J., Carrasco, R.C., 2004. A coupled elas-toplastic damage model for geomaterials. Comput. Methods Appl. Mech. Eng.193, 2625e2643.
Sawczuk, A., 1967. On yielding of Cosserat continua. Arch.Mech. 19, 3e19.Schultz, R.A., Fossen, H., 2002. Displacementelength scaling in three dimensions:
the importance of aspect ratio and application to deformation bands. J. Struct.Geol. 24, 1389e1411.
Schultz, R.A., Okubo, C.H., Wilkins, S.J., 2006. Displacementelength scaling relationsfor faults on the terrestrial planets. J. Struct. Geol. 28, 2182e2193.
Scordilis, E.M., 2006. Empirical global relations converting MS and mb to momentmagnitude. J. Seismol. 10, 225e236.
Shcherbakov, R., Turcotte, D., 2004. A modified form of Båth’s law. Bull. Seismol. Soc.Am. 94 (5), 1968e1975.
Stein, R., 1999. The role of stress transfer in earthquake occurrence. Nature 402(6762), 605e609.
Tahir, M., Grasso, J.-R., Amorèse, 2012. The largest aftershock: How strong, how faraway, how delayed? Geophys. Res. Lett. 39 (L04301), 5 http://dx.doi.org/10.1029/2011GL050604.
Twiss, R.J., 2009. An asymmetric micropolar moment tensor derived from adiscrete-block model for a rotating granular substructure. Bull. Seismol. Soc.Am. 99 (2B), 1103e1131.
Twiss, R.J., Unruh, J.R., 1998. Analysis of fault slip inversions: do they constrainstress or strain rate? J. Geophys. Res. 103, 12205e12222.
Twiss, R.J., Unruh, J.R., 2007. Structure, deformation and strength of the Loma Prietafault, northern California, USA, as inferred from 1989-1990 Loma Prieta after-shock sequence. GSA Bull. 119, 1079e1106.
Twiss, R.J., Protzman, G.M., Hurst, S.D., 1991. Theory of slickenline patterns based onthe velocity gradient tensor and microrotation. Tectonophysics 186, 215e239.
Twiss, R.J., Souter, B.J., Unruh, J.R., 1993. The effect of block rotations on the globalseismic moment tensor and patterns of seismic P and T axes. J. Geophys. Res. 98,645e674.
Udias, A., 1999. Principles of Seismology. Cambridge University Press, p. 475.Utsu, T., 1961. A statistical study on the occurrence of aftershocks. Geophys. Mag. 30,
521e605.Vere-Jones, D., 1969. A note on the statistical interpretation of Båth’s Law. Bull.
Seismol. Soc. Am. 59, 1535e1541.Vere-Jones, D., Murakami, J., Christophersen, A., 2006. A further note on Båth’s law.
In: Conference Proceedings of the 4th International Workshop on StatisticalSeismology (Zushi, Japan, January 2006), pp. 244e247.
Willam, J.K., 2002. ConstitutiveModels for EngineeringMaterials. In: Encyclopedia ofPhysical Science and Technology, third ed., vol. 3. Academic Press, pp. 603e633.
Xu, S.-S., Nieto-Samaniego, A.F., Alaniz-Álvarez, S.A., 2006. Effect of sampling andlinkage on fault length and lengthedisplacement relationship. Int. J. Earth Sci.95, 841e853.
Yoon, W.S., Jeong, U.J., Kim, J.H., 2002. Kinematic analysis for sliding failure of multi-faced rock slopes. Eng. Geol. 67, 51e61.
�Zalohar, J., 2012. Cosserat analysis of interactions between intersecting faults; thewedge faulting. J. Struct. Geol. 37, 105e123.
�Zalohar, J., Vrabec, M., 2010. Kinematics and dynamics of fault reactivation: theCosserat approach. J. Struct. Geol. 32, 15e27.