Embed Size (px)
Citation preview

1
Technical Report for Summer Research Experience for UndergraduatesCenter of Manufacturing Research, Tennessee Technical University
August 9, 2017, Cookeville, Tennessee, USA
Fabrication of Microfibrillar Material
Shane M. TerryTennessee Tech University
Dept. of Mechanical EngineeringCookeville, Tennessee 38505
United States of [email protected]
Hou Chong Chan The Cooper Union
Dept. of Mechanical Engineering30 Cooper Square, New York, NY 10003
United States of [email protected]
AbstractOn a microscopic scale, geckos have numerous setaeextrusions extending from its footpads allowing it to climbparticularly smooth surfaces. This structure is the workingbasis for directional dry adhesives. This adhesive is desiredfor applications such as climbing robots for its ability toadhere to many types of dry smooth surfaces. The currentprimary method for producing this material is throughphotolithography. This paper focuses on a CNC based processthat is economical compared to the photolithographic processand utilizes precise movements in the XY plane in which to cutnegative cavitation out of a material with a thin rotating discinto the desired shape. These cavities are then filled with asilicone elastomer and then cast to produce a directional dryadhesive. The process proposed in this paper is far lessexpensive than the traditional photolithographic process thatwas used to obtain similar features. The CNC based processproduces a controllable shear based adhesive where normaladhesion increases when loaded parallel to the plane.
Keywords: adhesion, directional, gecko, manufacturing
1. Introduction
Significant progress has been made in thetechnological fields involved in the production of numerousadhesives designed for a wide range of applications. Many ofthese chemical adhesives lack control, reusability, anddiversity when compared to directional dry adhesives.Microfibrillar adhesives, modeled after the natural adhesion ofgecko toe pads [1], adhere to metal, glass, plastic, woodpanels, and similar surfaces.
The gecko-based adhesive presents a very small areaof contact when unloaded. When the fibers are loaded in ageneral shear direction, they bend. The bending of the fibersresults in a greater contact area and greater adhesioncapabilities. Because of this, a high aspect ratio between thewidth and depth of the fibers is required in order to haveadequate adhesion.
Figure 1 Setae patterns on the footpad of a gecko [1]
The current primary manufacturing method utilizesphotolithography to generate the negative mold of themicrofibrillar adhesives. Silicone is then cast into this mold,yielding the adhesive itself. The time consumption and cost ofthis fabrication process have led to the search for an alternatemanufacturing process.
Stanford University utilized a microtome blade to cutinto a wax block. The blade, tilted at an angle of 60 degreeswith respect to the horizontal surface of the wax, indented andcut 100 micrometers into the wax piece. Silicone elastomerSylgard 170 is cast into the slits and allowed to cure at roomtemperature for 24 hours. A thin layer of PDMS, first spin-coated, is applied to the tips of the cast to reduce roughness ofthe adhesive and thus improve the adhesion capabilities of themold [2].
The fabrication method introduced in this paper issimilar to the method introduced by Stanford University. Adicing blade is spun at 10,000 RPM to machine the surface ofthe mold material. A polycarbonate or glass substrate is heldfixed by aluminum vice. Two actuators and a micrometer stageis attached to the vice, allowing the control over the threeplanar degrees of freedom. The movements of the actuatorsare automated by the SEM Terminal codes and the MATLABprogram.

2
In Section 2, the details for several manufacturingprocedures of the adhesives are given. Section 3 yields testresults from utilizing different dicing blades on differentsubstrates. The adhesives produced from the experiments areshown in Section 4. Section 5 discusses the results from theexperiments.
2. Procedure
Figure 2 Complete machining apparatus to fabricate the mold piece
2.1 Modeling of Machinery. The apparatus that is used wasconstructed out of T-slotted aluminum and designed to have asize and mass large enough to minimize vibrations. Motion iscontrolled by two Parker 404XR actuators which are utilizedto precisely control the XY plane. The depth is controlled by aSigma Koki micrometer stage. The substrate is mounted into acustom milled vice attached to the micrometer stage. Lastly,the cutting is handled by a Guzik S1701 spindle incombination with Disco NBC-ZH2050 diamond cutting blades(Figure 2).
2.2 Characterization of Equipment. In order to accuratelycut cavitations on the microscopic level, all of the parametersinvolved and the associated errors have to be understood.
The goal of the apparatus is to have it cut longsequential patterns. In order to achieve this, the actuators needto have an established set of guidelines. Using a mounted dialindicator to measure the motion of the actuators, wedetermined that 10 micro steps = 1 micron. This wasestablished by the 404XR Parker datasheet and then confirmedthrough numerous tests. The testing method involved sendingcommands to the actuators, and then measuring the real actualdistance traveled.
The substrate must be perpendicular to the cuttingedge and remain perpendicular in order to obtain a consistentpattern. This is done though mounting the dial indicator to thespindle and fixing the spindle in place. The specimen is thenmoved along the XY plane taking measurements with the dialindicator throughout the motion. The base of the apparatus isthen adjusted to a compensating angle that allows the substrateto be perpendicular to the cutting blade.
In order to have a consistent depth along the setaepattern, the rotating disc must have a minimized runout. Themajor sources of runout error are the spindle itself and theshaft on which the spinning disc is mounted. To measure this,a dial indicator was magnetically mounted and positionedalong the radial edge of the cylindrical pieces. The staticrunout of the spindle before testing was found to be between2-11 microns depending on the location along the spinningcylinder. The static runout of the mounted shaft before testingwas found to be between 2-3 microns. After numerousmeasurements taken before and after sequences of cuts, it wasconcluded that the maximum runout was 15 microns at thebeginning of testing and the minimum was 9 microns at theend of testing. This shows consistency in the error despitecutting into a substrate, with the error decreasing with eachsubsequent test.
The spindle in the apparatus is controlled by anArduino Mega where the RPM is controlled by the duty cyclesignal. In order to accurately control the revolution speed, it isimportant to establish a relationship between the PWM dutycycle and the speed. Through sequential testing at “voltages”of 1, 2, 3, 4, and 5 (20%, 40%, 60%, 80%, and 100% dutycycle respectively), it was found that the max speed of thespindle was 12500 RPM at 100% duty cycle. The result ofthese tests was a relationship between “Voltage” PWM DutyCycle and RPM with an equation listed below:
RPM = 2530.2*(V) – 285.58R2 = 0.9991
Where the PWM duty cycle is given in volts (V = PWM *5) and the speed is given in revolutions per minute.
2.3 Cutting Procedure. A 3.5” x 3.5” specimen piece wasused in our testing with the substrate material different basedon various tests. This piece is then secured in a V-shaped visemount to minimize XY motion of the substrate. The diamonddicing blade is then attached to the end of the spindle shaft.
To begin the cutting sequence, open the MATLABscript CompleteMachiningCode and enter ‘1’ into thecommand line to execute the homing procedure. The homingprocedure must first run to set the parameters for the slew rate,acceleration, etc. These parameters are deleted after theactuators are turned off. In order to zero the height to thesubstrates surface, enter ‘4’ into the command line and movethe actuator to the edge of the piece by assigning a value of-15000. Zero the height by having the disc barely touch thesurface of the substrate, and then gives a distance ofapproximately 5 microns off of the surface. Enter ‘4’ into thecommand line again and 15000 to move the mold to the rightof the dicing blade. Adjust the micrometer stage to the desiredheight plus the compensation given to the blade when zeroing.

3
The surface should be sprayed with a lubricant to avoidmelting the substrate; in our case, water was used. Beforepowering the spindle on, safety precautions should be taken.The impact resistant shield should be moved into a positionaround the apparatus. Once in a safe position, enter ‘3’ into thecommand line and set the number of passes desired. A single“pass” is the motion where it goes -1100000 steps, 11centimeters, followed by 1100000 steps to return to its startingposition. If the process needs to be stopped at any time, unplugthe serial USB cables from the laptop and wait for theactuators to reach the end. Pause the MATLAB code and enter‘end’ into the command line to break the program. Run theprogram again or hit the emergency stop for the spindle tocease rotational motion. Since the command was already sentto the actuator, unplugging the cable would only prevent anyadditional commands to reach the actuators. In the case of aserious event, the emergency stop should be engaged first.
2.4 Cleaning Procedure. The fabricated mold can be cleanedby applying water to the machined surface and wiping it offusing an abrasive towel. If polycarbonate is used as thesubstrate, dross will remain on the specimen. To remove theseshavings, apply a layer of water and a layer of hot glue (oranother easily removed adhesive) respectively onto themachined surface. Flush the layers against a flat surface tohave the shavings adhere to the glue. Wait an appropriateamount of time for the glue to solidify. The adhesive can thenbe removed from the specimen. Substrate shavings should beremoved in the process. If residuals still remain on thespecimen, repeat the cleaning process.
2.5 Casting Procedure. Once the desired pattern is cut intothe substrate, the piece needs to be secured in a manner to holdliquid silicone on the surface for a lengthy amount of time.
The silicone elastomer must be mixed properly. Forour case, the Sylgard 184 needs to be mixed in a 10:1 ratiowith the curing agent. Once mixed, the solution needs to bestirred thoroughly and then placed inside of a vacuumchamber to remove bubbles. The bubbles will interfere withour desired pattern for the directional dry adhesive. Securingthe liquid silicone can be done numerous ways, but the twoprimary ways that were used was either by attaching acrylicwalls around the substrate piece to enclose the surface or bysurrounding the pattern in hot glue. The enclosed piece is thenfilled with the silicone solution and placed in the vacuumchamber a second time to remove newly created bubbles.Finally, the silicone covered substrate should be placed in atemperature chamber running at 100 degrees Celsius. Thiscuring process should take between 35-50 minutes. Theresulting piece should be a silicone adhesive that matches thesubstrate’s pattern.
2.6 Changing Variables in SEM Terminal In the case thatvariables need to be reassigned, open the SEM TerminalSoftware, Y_M1_M2_M3.mxt, and X_M1_M4.mxt. TheY_M1_M2_M3.mxt code controls the length of each pass, andthe X_M1_M4.mxt code controls the distance between eachsequential pass. X_M1_M4.mxt is the code for COM3 andY_M1_M2_M3.mxt is the code for COM4. This is theirassigned arrangement when operating them from the
computer. The aforementioned codes each have slew rateterms that can also be adjusted. The terms Vi and Vm controlthe slew rate of the actuators (minimum and maximumvelocity respectively). In order to upload a modified code,change the SEM settings to MDI and enter “fd” into thecommand line. This code restores the actuators to their factorydefault settings. Finally, upload the modified codeX_M1_M4.mxt onto a terminal linked to COM3 andY_M1_M2_M3.mxt onto a terminal linked to COM4.
3. ExperimentationA couple different substrate and disc combinations
were tested to find what would yield the best results inproducing the desired shape. Disc blades NBC-ZH2050 andNBC-ZH204J are used to in the experimentation. NBC-ZH2050 is a straight square-ended blade that is 35 micronsthick. NBC-ZH204J is a two sided beveled blade that has abevel of 30 degrees from the midsection of the blade. Theblade has a maximum thickness of 150 microns.
Figure 3 Frontal view of the patterns generated by the machining
apparatus: (a) Straight blade on annealed glass, (b) Straight blade on
ceramic glass, and (c) Straight blade on polycarbonate
3.1 Annealed Glass Substrate. The testing setup for thetempered glass involved using a straight NBC-ZH2050 and abeveled NBC-ZH204J to see what would yield the best results.Neither blades were successful in producing defined featureson annealed glass and instead the result was a splinteredpattern. The hardness of the annealed glass caused fracturesalong various cut paths resulting in an undesired shape (Figure3a).
3.2 Ceramic Glass Substrate. The testing setup for theceramic glass involved using a straight NBC-ZH2050 and abeveled NBC-ZH204J to see what would yield the best results.Both blades produced severe deformations within the toolingpaths. A slew rate of 10000 steps/s or lower is preferred.Through tuning of various depth and distance settings, apattern was achieved. However, the pattern still lacked thedesired defined features (Figure 3b).

4
3.3 Poly Carbonate Substrate. The testing setup for theceramic glass involved using a straight NBC-ZH2050 and abeveled NBC-ZH204J. A slew rate of 15000 steps/s or lower ispreferred when cutting with the NBC-ZH2050 blades. Thebeveled blades were able to produce sequential patterns butthe soft bonded diamonds generated too much friction andsequentially cause parts of the polycarbonate to melt. Thestraight blades yielded excellent results and features.Polycarbonate in combination with a straight blade producesthe most consistent setae structure when cast into a siliconeadhesive specimen (Figure 3c).
3.4 10x MicroStructures Film and Standard ComputerScreen Film. A sample of a microprism film with sequentialorthogonal square cuts that are 17 microns wide and 125 to150 microns deep was obtained from 10x MicroStructuresCompany. The smooth surface of the film is bonded to abackplate, and the perimeter of the film is enclosed. A moldpiece was created with a micro-prism computer screen filmusing the same method. Liquid silicone was then cast into bothmold pieces in the same manner that was described in Section2.4. The castings from the two mold pieces will be used tocompare adhesive properties with that of the castings from themachined mold.
4. Results
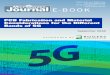
4.1 Casting from the Polycarbonate substrates with cutsproduced by straight blades. The thickness of each siliconefiber and the distance between each fiber corresponds to thewidth of each cut and the distance between the cutsrespectively. Cuts 130 microns apart and 80 microns deepwere made on a 3.5 in x 3.5 in polycarbonate piece. The piecewas then used to cast Sylgard 184. The retrieved casting wasplaced under the 40X-1000X Dual Light Glass Lens MetalFramework Science Microscope to observe the qualities of thecavities. A thin piece of the silicone containing a cross sectionof the cuts was sliced out to observe the depth and width ofeach cut. Images of the cuts were taken using a compatible3MP digital camera. The resulting width of each of the wedgesare 45 to 55 microns thick and 170 microns deep (Figure 4a).The distance between fibers is 70 to 75 microns (Figure 4b).
Figure 4 Silicone casting of the machined mold seen through an optical
microscope at 250X zoom: (a) cross section of the silicone and (b) view of
the sequential wedges on the silicone.
Figure 5 Silicone casting of the computer film seen through an optical
microscope at 250X zoom: (a) cross section of the silicone and (b) view of
the sequential wedges on the silicone.
The silicone casting from the computer screen film mold pieceyields a depth of 20 microns and a width of 60 microns(Figure 5a). The distance between grooves is opticallymeasured to be approximately 62 microns (Figure 5b). Thepiece demonstrates adequate adhesive properties as it was ableto lift a 3.5” x 3.5” section of annealed glass for two secondswhen two adhesive pieces were pressed on opposing sides
Figure 6 Silicone casting of the 10X MicroStructures film seen through an
optical microscope at 250X zoom: (a) cross section of the silicone and (b)
view of the sequential wedges on the silicone.
The depth of the casting retrieved from the 10XMicroStructures Film piece is 125 to 150 microns in depth and12 to 15 microns in width (Figure 6a). The width betweeneach sequential fiber is 12 to 15 microns apart (Figure 6b).The results are similar to the specified dimensions of the film.
5. DiscussionThe error between the intended depth (80 microns)
and the measured depth (170 microns) of the casting retrievedfrom the machined piece is 112.5 %. This may have resultedfrom systematic error in the Sigma Koki micrometer stage asit is only accurate to 10 microns. This limitation in theinstruments dimensions could be the cause of the error duringthe zeroing process where the user relies on a combination ofvisual observation and micrometer adjustment in order to zerothe specimen.. Another primary source of error is the varyingheight of the substrate relative to the dicing blade. The methodused to level the surface of the substrate in Sec.2.2 is notprecise enough to reduce the variance in height in thisparticular application because the method described in Sec.2.2also relies on the accuracy of the micrometer stage. However,longer wedges allow for more real contact area when a shearload is applied to the adhesive, which correlates to improvedadhesive properties. Additionally, the width of each fiber isgreater than the thickness off the disc blade used as well. The

5
57% error between the two measurements may have resultedfrom the disc blade not resting orthogonally to the spindle andfragments of the polycarbonate piece breaking off due to thehigh rotational loadings from the disc blade.
The silicone cast in the 10x MicroStructures filmmold piece and the 10x MicroStructures prism film showsimilar dimensions. The depth of each wedge is 170 microns,whereas the cuts on the film are specified to be 150 micronsdeep. The resulting deviation is 13.33 %.
The silicone cast in the computer film mold pieceshows similar promising results as well. The cross section ofthe silicone shows equilateral triangular wedges at its surface,matching the negative cavities in the mold. These resultsdemonstrate that air bubbles were properly removed from themixture in the vacuuming process.
6. Appendices
6.1 Micrometer Stage Characterization
6.2 Width and Depth Correlation of Beveled Blades
6.3 Spindle PWM and RPM characterization
6.4 Collection of Iterative testing data
6.4a Micro-Prism Film data

6
6.4b Substrate cutting data

7
6.5 Y and X Actuator Steps vs MicrometerCharacterization
6.6 SEM Terminal Code- X_M1_M4.mxt'MICROMACHINING PROGRAM IN THE X DIRECTION'
PG 1 'write the address from the starting addressof 1'
LB M1 'Labelling homing program as M1'
'Setup Variables' Vi= 10000 'Setting up the min velocityVm= 50000 ' Setting up the emax velocityA=10000 'Setting up the Acceleration D=10*A 'Setting the deceleration to be equal the acceleration parameterMs=256 'Microsteps/steps (Max resolution)
'Setup InputsS1 = 1,0,0 'Homing, Active LOW, SinkingS3 = 2,1,0 'Limit +, Active HIGH, SinkingS2 = 3,1,0 'Limit - , Active HIGH , Sinking
'Slew until hit positive endstopLm = 1 ' Set limit to decel to stop when triggeredEe = 0 'Slew based on motor stepsSL 50000 'Slew in the positive direction (until endstop is triggered)H 'Hold until motion stops
'Home in the negative directionHM 1 ' Home in minus direction until triggered then creep forward at VI until releasedHP=0 'Set position counter to 0HPR "P=",P
'Moving Toward you to initialize the cut MR -225000HPR "P=",P PR "Z" 'Character for the ErrorCheck function to read in MATLABE
'Incrementing in the X direction everytime a cut is madeLB M4PR "P=", PMR 1800HPR "Z"PR "Z"PR "Z"PR "Z"PR "Z"E
PG
6.7 SEM Terminal Code- Y_M1_M2_M3.mxt '[PROGRAMS] PG 1 LB M1 Vi = 15000 Vm = 15000 A = 10000 D = 15 * A Ms = 256 S1 = 1, 0, 0 S3 = 2, 1, 0 S2 = 3, 1, 0 Lm = 1 Ee = 0 SL - 30000 H HM 1 H P = 0 H PR "P=", P MR 450000

8
H PR "P=", P PR "Z" E LB M2 PR "P=", P MR - 1100000 H PR "P=", P PR "Z" E LB M3 PR "P=", P MR 1100000 H PR "P=", P PR "Z" E LB M5 PR "P=", P HM 3 H MR 550000 H PR "P=", P PR "Z"
E PG
'[END]
6.8 MATLAB Code clear all; clc; close all;clear aformat compact;delete(instrfind)%% Comment Section/ User Guide %{If A Microstep Resolution of 25400 microstep/rev and at that resolution, 0.001mm/microstepThen 1 rev= 25.4 mm.The Ms value of 256 would give 256 x 200 = 51200 mi-crosteps/rev would give0.00049609375 mm/ microstep (.49609375 micrometer/ mi-crostep). 10 REMINDER: MAKE SURE TO HOME THE ACTUATORS TO SET PARAMETERS ON THE DRIVERS FIRST%}%% Inputs SerialY = 'COM4'; % Set the Y axis to the serial port SerialX = 'COM3'; % Set the X axis to the serial portP = 5; %Pause Rate in terms of secondsEC = 0; % Setting up and error check parameter. This will be used in the 'Error Check' function. %% Set up Variables for Spindle rpm=input('How fast would you like the spindle to spin at?(12500 rpm is the max)\n'); % rpm of the spindle, the max rpmis 12500.%% RPM to Voltage Conversion
xMax = 5; % xMax and xMin are limting parameters ( Rangedfrom 0-5 V)xMin = 0;x = (rpm+285.58)/2530.2; %Conversion between rpm and voltagex(x>xMax) = xMax; x(x<xMin) = xMin;pwm = x; % 0 - 5 V, Maximum of 3.6 V%% PWM Controller clear aArduino = 'COM5'; % Setting up the Arduino porta = arduino(Arduino, 'Mega2560'); writePWMVoltage(a, 'D11', pwm); % Writing the pwm signal to the spindle %% Initializing Serial Port X fprintf('Initializing Serial Port X\n'); % A message % Deleting the previous serial ports to reinitialize the process. sx=serial(SerialX); % Linking 'COM3' to serial. This is the X axis of the test rig. set(sx,'BaudRate', 9600); % Setting up the configuration pa-rameters for the serial port targets above.set(sx,'DataBits', 8); % Setting up the configuration parame-ters for the serial port targets above.set(sx,'StopBits', 1); % Setting up the configuration parametersfor the serial port targets above.fopen(sx); %Opening the configured serial port. sx.Terminator = 'LF/CR'; %Setting up how the serial port is going to be read. %% Initializing Serial Port Y fprintf('Initializing Serial Port Y\n'); % A message sy=serial(SerialY); % Linking 'COM4' to serial. This is the Y axis of the test rig.set(sy,'BaudRate', 9600); % Setting up the configuration pa-rameters for the serial port targets above.l set(sy,'DataBits', 8); % Setting up the configuration parametersfor the serial port targets above.set(sy,'StopBits', 1); % Setting up the configuration parametersfor the serial port targets above.fopen(sy); %Opening the configured serial port. sy.Terminator = 'LF/CR'; %Setting up how the serial port is going to be read. %% Writing to Serial Port X and Ywhile EC == 0 disp('1 for Homing, 2 for mold cutting initiation, 3 for cut-ting passes, 4 for manual y axis movements,'); disp('5 for manual x-axis movements, 6 to end program'); prompt = 'What would you like to do?\n'; x = input(prompt); % Command Options if x == 1 fprintf(sy, 'EX M1'); % Performing the Machining process. The linear actuator is homed. ErrorCheck(sy); % This is the function created to check that the previous fprintf is finished. Once it says that 'Process Ended', it will pause for 2 seconds before initiating the next command. fprintf(sx, 'EX M1'); % Homing the other linear actuator.

9
ErrorCheck(sx); % Error Check function for sx. The pa-rameter in the function has to be the same as the one targeted in the previous line. elseif x == 2 fprintf(sy, 'EX M5'); %Move the linear actuator to the its starting position after performing Homing process ( input prompt '1') ErrorCheck(sy); % Wait for the execution to complete elseif x == 3 n_pass = input(' How many Passes would you like?\n'); % A single pass cuts through the mold twice. First one in the negative y direction and the second one in the position y direc-tion. Back_And_Forth = 0;%{ The loop involves executing uploaded programs on the mDriver. In order for this to work, programs 'Y_M1_M2_M3.mxt' and 'X_M1_M4.mxt' must be up)loaded and the Homing process (command prompt '1') must be used( The Driver resets everytime when it is powered off). You canend execution by entering 'exit' in the command line. %} for v= 0:1:n_pass-1 fprintf(sy, 'EX M2'); % Moves the substrate in the neg-ative y direction by 1100000 steps ( To completely cut throughthe mold) ErrorCheck(sy); % Wait for the command above to end fprintf(sx, 'EX M4'); % Moves the substrate in the neg-ative x direction by 700 steps (70 microns) ErrorCheck(sx); fprintf(sy, 'EX M3'); % Moves the substrate in the pos-itive y direction by 1100000 steps ErrorCheck(sy); fprintf(sx, 'EX M4'); % Moves the substrate to the neg-ative x direction again ErrorCheck(sx); Back_And_Forth = Back_And_Forth + 1; fprintf(' Current Pass Number : %d (One Pass is a backand forth run)\n',Back_And_Forth) end writePWMVoltage(a, 'D11', 0); % Stops the spindle elseif x == 4 ysteps = input('How many ysteps would you like?\n 10 steps = 1 micron\n'); % Manually configure the steps for the y linear actuator y_com = sprintf('MR %d', ysteps); fprintf(sy,y_com); elseif x == 5 xsteps = input('How many xsteps would you like?\n 10 steps = 1 micron\n'); %Manually configures the x steps for thex linear actuators x_com = sprintf('MR %d', xsteps); fprintf(sx,x_com); elseif x == 6 % exits the program
EC = 1; disp('Program ended') else disp('Invalid command, Please try again') endend %% Closingfclose('all'); % Closing both serial ports.
7. Acknowledgment
The authors thank Tennessee Technical University,Dr. Stephen Canfield, Matthew Powelson, Dr. Chabum Lee,Michelle Davis, and Ben for the opportunity to participate inthe Summer Research Experience for Undergraduate programand assistance in the research. This work was supported in partby a National Science Foundation and Center forManufacturing Research.
8. References
[1] “Fingers of Gecko.” Fine Art America, Jun. 12 2012. [16Jun. 2017]. https://fineartamerica.com/
[2] Paul Day, Eric V. Eason, Noe Esparza, Davis Christensen,and Mark Cutkosky, 2013, “Micro-Wedge Machining for theManufacture of Directional Dry Adhesives,” ASME Trans.Mech.