Embed Size (px)
Citation preview

Fast and robust curve skeletonization for real-world elongated objectsAmy Tabb1 and Henry Medeiros2
1USDA-ARS-AFRS and 2Marquette University
Motivation
Curve skeletons are locally one-dimensionalrepresentations of three-dimensional structure,and there is a rich history of work on curveskeletons in various communities. In this work,we intend to use curve skeletons as an interme-diate step between surface reconstruction andcomputing measurements of branches for au-tomation applications in which the followingare important:
• robustness to noise
• fast execution
such as in the automatic modeling of fruit treesin an orchard [5].
Approach
Cross sections of di values
0
3.5
7
(a) Step 1.1:Compute di
v∗
(b) Step 1.2:Locate v∗
0
224
448
672
(c) Step 2.1:Compute BFS1 mapfrom C = {v∗}
vt
(d) Step 2.2:Locatepotentialendpoint vt
from BFS1labels
vt
C = {v∗}
unexploredregion 0
226
452
678
(e) Step 3.1: ComputeBFS2 from vt; blackregions are currentlyunexplored.
vt
(f) Step 3.2:Compute pathfrom BFS2labels
C(1)
(g) Step 4.1:Accept path ifnot spurious
000
001
002
003
004
005
006
007
008
009
010
011
012
013
014
015
016
017
018
019
020
021
022
023
024
025
026
027
028
029
030
031
032
033
034
035
036
037
038
039
040
041
042
043
044
000
001
002
003
004
005
006
007
008
009
010
011
012
013
014
015
016
017
018
019
020
021
022
023
024
025
026
027
028
029
030
031
032
033
034
035
036
037
038
039
040
041
042
043
044
ECCV#257
ECCV#257
C(1)
vt
C(3)
C(2)
(h) Step 4.2:Loopprocessing
Figure 1:
Illustration. Fig. 1a shows step 1.1, where the distance labelsdi are computed. Then 1b shows step 1.2, where v∗ is selectedfrom the local maxima of di. In Step 2.1, the BFS1 map from v∗
given di is computed (Figure 1c). In 1d, step 2.2, the maximallabel from step 2.1 is selected as a proposed endpoint vt.Figure 1e shows step 3.1 in which we compute the BFS2 labelsfrom vt to the current curve skeleton, which is C = {v∗}.Step 3.2 in Figure 1f consists of tracing the path through theBFS2 labels from v∗ to vt. In step 4.1, we accept the path aspart of the curve skeleton if it passes the spurious path test(Figure 1g). Finally, in Figure 1h we show the loop handlingprocedure; vt is found on the right-hand side, and the loop isincorporated into the curve skeleton. This completes the stepsfor iteratively adding a curve segment. Steps 2.1 through 4.2are then repeated until there are no more proposed endpointsthat pass the spurious path test.
Method features and contributions
•An algorithm that operates on voxels
•A path-based algorithm for real-time computationof curve skeletons
•One parameter that represents noise level
•No additional pruning
• time complexity O(n73) (n = number of occupied
voxels)
•method can handle loops
• source code provided
Synthetic experiments
Our method was compared to Thinning [4], PINKskel [2], PINK filter3d [1], and Jin et al. [3].The method was evaluated on synthetic data with aknown ground truth, and then artificial noise wasadded.
(a)Originalsurface
(b) Groundtruth curveskeleton
(c)Thinning
(d) PINKskel
(e) PINKfilter3d
(f) Jin etal.
(g) Ourmethod
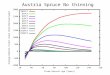
2 4 6 8 10 12 14
Maximum voxel noise
0
100
200
300
400
RM
SE
Thinning
PINK skel
Jin et al.
Our method
Figure 2: Root mean squared error of the curve skeletons
computed with the comparison methods and our method, as
compared to the ground truth curve skeleton.
Qualitative results
(a) Surface (b) Thinning (c) PINK skel
(d) PINK filter3d (e) Jin et al. (f) Our method
Figure 3: Original surfaces and skeletons computed with our
method.
Runtime results
A B C D E F G H I
Dataset
10-2
100
102
104
Run t
ime (
seconds)
Thinning
PINK skel
PINK filter3d
Jin et al
Our method
Figure 4: Run times of our curve skeletonization method on
the nine datasets in comparison with the existing approaches.
The vertical axis is shown on a logarithmic scale.
Additional Information
•The full paper and 37-page supplementarymaterial are available on arXiv:arXiv:1702:07619[cs.CV].
•Code and an example model is also available:(dataset) Tabb, Amy (2017). Code from: Fast androbust curve skeletonization for real-worldelongated objects. Ag Data Commons.http://dx.doi.org/10.15482/USDA.ADC/1399689
References
[1] G. Bertrand and M. Couprie.Two-dimensional parallel thinning algorithms based on critical kernels.Journal of Mathematical Imaging and Vision, 31(1):35–56, 2008.
[2] M. Couprie, D. Coeurjolly, and R. Zrour.Discrete bisector function and euclidean skeleton in 2D and 3D.Image and Vision Computing, 25(10):1543 – 1556, 2007.
[3] D. Jin, K. S. Iyer, C. Chen, E. A. Ho�man, and P. K. Saha.A robust and e�cient curve skeletonization algorithm for tree-likeobjects using minimum cost paths.Pattern recognition letters, 76:32–40, 2016.
[4] T.-C. Lee, R. L. Kashyap, and C.-N. Chu.Building skeleton models via 3-d medial surface/axis thinningalgorithms.CVGIP: Graph. Models Image Process., 56(6):462–478, Nov. 1994.
[5] A. Tabb and H. Medeiros.A robotic vision system to measure tree traits.In IEEE RSJ International Conference on Intelligent Robots and Systems,2017.
Acknowledgements
This material is based on work supported inpart by US National Science Foundation grantnumber IOS-1339211 to A. Tabb.
Contact Information
•Email: [email protected]
•Email: [email protected]