Embed Size (px)
Citation preview

Fault Tolerant Control of Wind Turbines
using Unknown Input Observers
Peter Fogh Odgaard ∗ Jakob Stoustrup ∗∗
∗ kk-electronic a/s, 7430 Ikast, Denmark (Tel: +45 21744963; e-mail:[email protected]).
∗∗ Aalborg University, 9220 Aalborg East, Denmark (e-mail:[email protected])
Abstract: This paper presents a scheme for accommodating faults in the rotor and generatorspeed sensors in a wind turbine. These measured values are important both for the wind turbinecontroller as well as the supervisory control of the wind turbine. The scheme is based on unknowninput observers, which are also used to detect and isolate these faults. The scheme is tested ona known benchmark for FDI and FTC of wind turbines. Tests on this benchmark model showa clear potential of the proposed scheme.
Keywords: Wind Turbines, Fault Accommodation, Unknown Input Observer.
1. INTRODUCTION
In the process of minimizing the cost of energy generatedby wind turbines, it is of high importance to increase thereliability of these wind turbines. In this perspective faulttolerant control and fault diagnosis of wind turbines are ofhigh interest. These methods can be applied with relevanceto a number of different subsystems of a wind turbine.In this paper faults in the generator and rotor speedmeasurements are accommodated. These measurementscorrespond to the angular velocities of the shaft in awind turbine on the rotor side and generator side ofthe gear box in a wind turbine. The generator speed istypically used as a feedback signal in the control schemescontrolling and optimizing the energy production in awind turbine. In addition these velocities may also notexceed given maximal values due to mechanical stressesand loads in the wind turbine. Consequently, in a typicalstate-of-the-art wind turbine redundant measurements areavailable for detection of sensors faults, however, theseschemes are based on the physical redundancy resulting ina required shut down of the wind turbine in case of a faultin one of these sensors. However, analytical redundancycan be obtained in the case of a sensor fault by usingthe remaining sensors together with a model of the windturbine, see Odgaard and Stoustrup [2010].
In Odgaard et al. [2009] a benchmark model for faultdetection and isolation as well as fault tolerant controlof wind turbines was proposed. Faults in the rotor andgenerator speed sensors are included in this benchmarkmodel. In Odgaard and Stoustrup [2010] an unknown inputobserver based scheme was proposed for fault detectionand isolation of the rotor and generator speed sensorfaults in the mentioned benchmark model. Solutions tofault detection and isolation in this benchmark model isalso proposed in: Chen et al. [2011], Laouti et al. [2011],Ozdemir et al. [2011], Svard and Nyberg [2011], Zhanget al. [2011], Pisu and Ayalew [2011], Blesa et al. [2011],Dong and Verhaegen [2011], Kiasi et al. [2011], Simani
et al. [2011a], Simani et al. [2011b] and Stoican et al.[2011].
In this paper an FTC scheme is designed based on es-timates of the generator speed based on a bank of un-known input observers. The proposed is denoted a FaultTolerant Observer (FTO) scheme in this paper. One ob-server designed for each of the sets of non faulty rotorand generator speed sensors. An unknown input observerbased scheme is chosen since it enables the possibility toinclude robustness towards the uncertainty of the windspeed, which is difficult to measure. Due to the structureof the unknown input observer these observers can sharethe observer state vector, meaning that at each sample the“correct” observer write its state vector into a commonstate vector, which each of the observers initialize theirstate vectors from at the next sample. The accommodationscheme also introduces an offset on the generator speedestimate, which should ensure that the generator speedis below the maximal value even though that the differentobservers might introduce a higher level of uncertainty dueto the available healthy sensors. This FTO scheme is basedon the fault detection and isolation scheme also based onthe unknown input observer presented in Odgaard andStoustrup [2010].
In this paper the proposed scheme is tested on abovementioned benchmark model only considering the faultsin the rotor and generator speed sensors, extended withtwo other combinations of sensor faults.
In Section 2 the benchmark model of a wind turbineused in this work is presented, followed by the proposedunknown input observer based scheme in Section 3. Theproposed scheme is tested in Section 4. A conclusion isdrawn in Section 5.
2. SYSTEM DESCRIPTION
This paper considers a generic wind turbine of 4.8 MWdescribed in Odgaard et al. [2009] is considered. Notice

Blade & Pitch System
Drive TrainGenerator & Converter
Controller
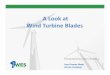
Fig. 1. This figure shows the overall model structure. vwdenotes the wind speed, τr denotes the rotor torque,ωr denotes the rotor speed, τg denotes the generatortorque, ωg denotes the generator speed, βr denotesthe pitch angle control reference, βm denotes themeasured pitch angles, τw,m denotes the estimatedrotor torque, ωr,m denotes the measured rotor speed,τg,m denotes the measured generator torque, ωg,m
denotes the measured generator speed, Pg denotes themeasured generated electrical power, τg,r denotes thegenerator torque reference, and Pr denotes the powerreference.
that the model in that paper contains a number of faultscenarios which are disabled in the work presented in thispaper. This turbine is a variable speed three blade pitchcontrolled turbine, with a front horizontal axis rotor.
2.1 Wind Turbine Model
The used wind turbine model are from Odgaard et al.[2009], and is not described in details in this paper, thedetails can be found in the mentioned paper. An overviewof the model can be seen in Fig. 1, in which vw denotesthe wind speed, τr denotes the rotor torque, ωr denotesthe rotor speed, τg denotes the generator torque, ωg
denotes the generator speed, βr denotes the pitch anglecontrol reference, βm denotes the measured pitch angles,τw,m denotes the estimated rotor torque, ωr,m denotesthe measured rotor speed, τg,m denotes the measuredgenerator torque, ωg,m denotes the measured generatorspeed, Pg denotes the measured generated electrical power,τg,r denotes the generator torque reference, and Pr denotesthe power reference.
Each element of the model is shortly described in thefollowing.
Wind Model The wind speed is given by a wind modelincluding mean wind trends, turbulence, wind shear andtower shadow.
Aerodynamic and Pitch Actuator Model Aerodynamicsand pitch actuators are modeled in Blade and Pitch Sys-tem model, the pitch actuator is modeled as a second ordertransfer function with constraints. The aerodynamics aremodeled by a static mapping from the pitch angle, rotorand wind speeds to the torque acting on the wind turbinerotor.
Drive Train Model The drive train, which is used toincrease the speed from rotor to generator, is modeled witha flexible two-mass system. The drive train model includes
the inertia of the rotor (which includes blades and the mainshaft) and generator.
Converter Model The converter which controls the gen-erator torque is modeled by a first order system withconstraints. This model covers both the electrical behaviorof the generator and converter.
Sensor Models This model is not shown on the figure,since models of each sensors in the figure are included inthe relevant part models. The model contains a numberof sensors, generator and rotor speed, pitch angles, windspeed, converter torque, electrical power. All the sensorsare modeled as the measured variable added with randomnoise.
Controller The wind turbine operates in principle in4 regions: Region 1 in which wind speeds are too lowfor the wind turbine to operate, Region 2 in which theturbine operates up to a nominal wind speed (partial load),Region 3 between nominal and rated wind speed, wherethe nominal power can be produced, Region 4 above ratedwind speed, where the wind turbine is closed down in orderto limit extreme loads on the wind turbine.
The controller is active in Region 2 & 3. In Region 2,the optimal rotor speed is obtained by using the convertertorque as control signal. In Region 3 the rotor speed iskept at a given reference value by pitching the blades, (theconverter keeps the power at the reference taking care offast variations in the speed). In this paper only the secondregion control is considered. The basic controller in thedifferent regions is described in Johnson et al. [2006].
3. UNKNOWN INPUT OBSERVER BASED FTOBSERVER
The proposed Unknown Input Observer based Fault Tol-erant Control scheme consists of a bank of observers,each designed for the different fault scenarios: No Faults(Observer 1), a fault in one rotor speed sensor (Observer2), a fault in one generator speed sensor (Observer 3),faults in both rotor speed sensors (Observer 4), faults inboth generator speed sensors (Observer 5) and a fault inone generator speed sensor and one rotor speed sensor(Observer 6). These unknown input observers are designedusing the scheme presented in Chen and Patton [1999].These 6 designs cover all the possible combinations offaults since for the observer does not matter which of thetwo respective sensors of one speed is faulty, since thesesensors are only modeled by stochastic noise added to theactual speed value.
It is assumed that the model of the wind turbine can berepresented by a discrete time state space model of theform.
x[n+ 1] =Adx[n] +Bdu[n] +Edd[n] + ξ[n], (1)
yj [n] =Cd,jx[n] + η[n], (2)
where x[n] is the state vector, and
u[n] =
[
τgen,r[n]τaero
]
, (3)

yj [n] defines a vector of sensor signals, corresponding tothe jth observer. They are given below and for thosecoefficient without a number it indicates that only oneof these sensors are healthy.
y1 =
ωr,m1[n]ωr,m2[n]ωg,m1[n]ωg,m2[n]
, (4)
y2 =
[
ωr,m[n]ωg,m1[n]ωg,m2[n]
]
, (5)
y3 =
[
ωr,m1[n]ωr,m2[n]ωg,m[n]
]
, (6)
y4 =
[
ωg,m1[n]ωg,m2[n]
]
, (7)
y5 =
[
ωr,m1[n]ωr,m2[n]
]
, (8)
y6 =
[
ωr,m[n]ωg,m[n]
]
. (9)
d[n] is a vector of unknown inputs, ξ[n] defines the processnoise, η[n] defines the measurement noise. The discretetime model matrices are given as Ad, Bd, Ed, and Cd,j
which denotes the Cd matrix for the jth observer.
The unknown input observer in the discrete time form isgiven by (10-11). In this formulation of the observer thesubscript index j refers to the observer number.
z[n] = Fjz[n− 1] +TjBdu[n− 1] +Kjyj [n− 1], (10)
x̂[n] = z[n] +Hjyj [n], (11)
where z[n] is the observer state vector,
The following matrices are computed once.
Hj =Ed (Cd,jEd)−1
, (12)
A1j =AdHjCd,jAd, (13)
Tj =I3×3 −HjCd. (14)
The matrice Pj [0] is initialized to zero matrix.
For n > 0 the observer matrices are computed by
K1j [n] =A1
jPj [n− 1]CTd,j
(
Cd,jPj [n− 1]CTd,j +Rj
)
,
(15)
Fj [n] =Ad −HjCd,jAd −K1j [n]Cd,j , (16)
PPj [n] =Pj [n− 1]−K1
j [n]Cd,jPj [n− 1](A1j )
T , (17)
Pj [n] =A1jP
pj [n](A
1j )
T +TjQ(Tj)T +HjRj(Hj)
T ,
(18)
Kj [n] =Fj [n]Hj +K1j [n], (19)
All observers are computed at each sample but the vec-tors x[n] and z[n] are given as xi[n] and zi[n] where icorresponds to the observer number accommodating thedetected and isolated faults at sample n.
Using the FDI scheme based on unknown input observersdescribed in Odgaard and Stoustrup [2010] beginning andend of the faults are detected with a delay below 0.03[s],
which is within the requirements given in the benchmarkmodel, see Odgaard et al. [2009].
3.1 Increased estimation noise accommodation
The correctness of ω̂g[n] depends on which measurementsare fault free. The measurement noise on the rotor speedis dramatically higher than the measurement noises on thegenerator speed measurements. Consequently e.g. the faultcase with faults on both generator speed sensors will resultin higher noise level on ω̂g[n].
This is problematic since this will lead to higher am-plitudes on the oscillations of ωg[n]. The controller con-trolling this variable are designed to keep it below themaximal value, assuming certain noise levels on the es-timate/measurement of ωg[n].
In this scheme this problem is accommodated by addingan offset to estimate, which corresponds to a decrease inωg,r[n]. This offset should be so large that max(ωg[n]) <ωg,max. This offset is in the following denoted ωg,Oκ whereκ refers to the observer number.
3.2 Implementation of the scheme
The design is based on a discretized model of the windturbine in the benchmark model. These matrices are Ad,Bd and Cd. In addition three matrices are used in thespecific design of the Unknown Input Observer, which areused to tune the observer, these are Ed, Q and R. In thiswork they are found by iterations and tests.
The values of these matrices are listed below.
Ad =
[
0.8794 0.0013 −0.5605173.3713 −0.8256 800.11070.0114 −0.0001 −0.9456
]
, (20)
Bd =
1.7184 · 10−9−1.4797 · 10−7
1.4353 · 10−7−4.3079 · 10−5
4.4674 · 10−11 6.6198 · 10−8
, (21)
Cd =
1 0 01 0 00 1 00 1 0
, (22)
Ed =
0.0093 −1.2056 · 10−4
0.9628 0.17342.5710 · 10−4 1.1391 · 10−5
, (23)
Q =
[
0.05 0 00 0.05 00 0 0.05)
]
, (24)
R =
6.32 · 10−4 0 0 00 6.32 · 10−4 0 00 0 5.63 · 10−5 00 0 0 5.63 · 10−5
.
(25)
Notice that Cd is on a redundant form since the two rotorand two generator speed sensors respectively represent thesame state added with measurement noise.
In addition offset values are found by experiments to beωg,f1 = 0,ωg,f2 = 0.1, ωg,f3 = 0.4, ωg,f4 = 0.1, ωg,f5 = 0.4,ωg,f5 = 0.8

1500 1510 1520 1530 1540 1550 1560 1570 1580 1590 160095
100
105
110
115
120
125
130
135
140
145
150
Time [s]
ωg [r
ad/s
]
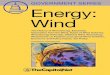
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 2. ωg in the time period in which a fault in ωr,m1 ispresent. The controller is based on the estimated ωg.The plot shows the fault free case, as well as threecases with faults: one without any fault accommoda-tion, the FT observer with and without the correctioncomponent.
4. TEST AND SIMULATIONS
The proposed scheme is in this section tested on the earliermentioned benchmark model. In the benchmark model twofault scenarios with faults in the sensors dealt with in thispaper are included. The first is a fault in one of the rotorspeed sensors and the second is faults in one of the rotorspeed sensors and in of the generator speed sensors. Inorder to test the proposed scheme in more details twoadditional faults are added to the benchmark model. Itis one fault in one of the generator speed sensor and faultsin both generator speed sensors. The last scenarios withfaults in both rotor speed sensors are left out since they donot decrease the quality of the generator speed estimatemuch.
In the following these tests are presented by plots of Pg[n]and ωg[n] during the specific faults in the case withouta fault, control not based on the FTO scheme and with aFault Tolerant Observer based controller with and withoutthe offset correction.
The fault scenarios in this test is: ωr,m1[n] is constant withthe value of 1.4rad/s in the time interval 1500s-1600s, again fault on ωg,m2 with the value of 0.9 in the time interval1900s-2000s, gain faults on ωr,m2 with the value of 1.1 andωg,m2 with the value of 0.9 in the time interval 1000s-1100s,and the last fault gain faults on ωg,m1 and ωg,m2 with thegain value on 0.9 in the time interval 2500s-2600s.
4.1 Fault in ωr,m1
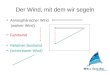
Fig. 2 plots ωg[n] during this fault, and Fig. 3 plotsPg[n] during the same fault. From these plots it can beseen that the FTO solutions keep both ωg and Pg atthe same trajectories as in the fault free case, while thenon accommodated controller results in a decrease in thegenerated power.
1500 1510 1520 1530 1540 1550 1560 1570 1580 1590 16001
1.5
2
2.5
3
3.5
4x 10
6
Time [s]
Pg [w
]
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 3. Pg in the time period in which a fault in ωr,m1 ispresent. The controller is based on the estimated ωg.The plot shows the fault free case, as well as threecases with faults: one without any fault accommoda-tion, the FT observer with and without the correctioncomponent.
1900 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000145
150
155
160
165
Time [s]
ωg [r
ad/s
]
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 4. ωg in the time period in which a fault in ωg,m2 ispresent. The controller is based on the estimated ωg.The plot shows the fault free case, as well as threecases with faults: one without any fault accommoda-tion, the FT observer with and without the correctioncomponent.
4.2 Fault in ωg,m2
Fig. 4 plots ωg[n] during this fault, and Fig. 5 plotsPg[n] during the same fault. The FTO solutions result inperformance of both ωg and Pg similar to the fault freecase, while the non accommodated controller results ina decrease in the generated power. Also notice that thecorrect fault tolerant observer results in ωg a bit low thanthe non corrected version.
4.3 Fault in ωr,m2 and ωg,m1
Fig. 6 plots ωg[n] during this fault, and Fig. 7 plots Pg[n]during the same fault. Again the FTO solution results in

1900 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000
4
4.2
4.4
4.6
4.8
5
x 106
Time [s]
Pg [w
]
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 5. Pg in the time period in which a fault in ωg,m2 ispresent. The controller is based on the estimated ωg.The plot shows the fault free case, as well as threecases with faults: one without any fault accommoda-tion, the FT observer with and without the correctioncomponent.
1000 1010 1020 1030 1040 1050 1060 1070 1080 1090 110075
80
85
90
95
100
105
110
Time [s]
ωg [r
ad/s
]
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 6. ωg in the time period in which Fault # 3 is present.The controller is based on the estimated ωg. The plotshows the fault free case, as well as three cases withfaults: one without any fault accommodation, the FTobserver with and without the correction component.
a removal of the consequences of the fault, while the nonaccommodated controller have a decrease in the generatedpower.
4.4 Fault in ωg,r1 and ωg,m2
Fig. 8 plots ωg[n] during this fault, and Fig. 9 plots Pg[n]during the same fault. From these plots it can be seen thatthe non accommodated controller results in a decrease inthe generated power, while the FTO solutions keep bothωg and Pg at the same trajectories as in the fault free case.
1000 1010 1020 1030 1040 1050 1060 1070 1080 1090 11000.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5x 10
6
Time [s]
Pg [w
]
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 7. Pg in the time period in which Fault # 3 is present.The controller is based on the estimated ωg. The plotshows the fault free case, as well as three cases withfaults: one without any fault accommodation, the FTobserver with and without the correction component.
2500 2510 2520 2530 2540 2550 2560 2570 2580 2590160
160.5
161
161.5
162
162.5
163
163.5
164
164.5
165
Time [s]
ωg [r
ad/s
]
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 8. ωg in the time period in which Fault # 4 is present.The controller is based on the estimated ωg. The plotshows the fault free case, as well as three cases withfaults: one without any fault accommodation, the FTobserver with and without the correction component.
4.5 Test Summary
In all four fault scenarios it can be seen that the proposedscheme accommodates the faults such that a system per-formance similar to the fault free one is obtained.
5. CONCLUSION
In this paper a fault tolerant unknown input observerbased scheme is proposed to estimate the generator speedin a wind turbine control system, which provides a validestimation of the generator speed during different typesof faults in the rotor and generator speed measurementsin the wind turbine. An offset is added to the estimatein order to keep the generator speed below the maximalvalue in case that the estimate has an increased noise level,

2500 2510 2520 2530 2540 2550 2560 2570 2580 25904.4
4.5
4.6
4.7
4.8
4.9
5
5.1x 10
6
Time [s]
Pg [w
]
Fault FreeNo FTOFTO w/ correctionFTO wo/ correction
Fig. 9. Pg in the time period in which Fault # 4 is present.The controller is based on the estimated ωg. The plotshows the fault free case, as well as three cases withfaults: one without any fault accommodation, the FTobserver with and without the correction component.
which results in larger variations on the actual generatorspeed. The scheme is tested on a known benchmark forFDI and FTC of Wind turbines. Tests on this benchmarkmodel show a clear potential of the proposed scheme.
REFERENCES
J. Blesa, V. Puig, J. Romera, and J. Saludes. Fault diagno-sis of wind turbines using a set-membership approach.In Proceedings of IFAC World Congress 2011, pages8316–8321, Milan, Italy, August-September 2011. doi:10.3182/20110828-6-IT-1002.01167.
Jie Chen and R. J. Patton. Robust model-based fault diag-nosis for dynamic systems. Kluwer academic publishers,first edition, 1999.
W. Chen, S.X. Ding, A.H.A. Sari, A. Naik, A.Q. Khan,and S. Yin. Observer-based fdi schemes for wind turbinebenchmark. In Proceedings of IFAC World Congress2011, pages 7073–7078, Milan, Italy, August-September2011. doi: 10.3182/20110828-6-IT-1002.03469.
J. Dong and M. Verhaegen. Data driven fault de-tection and isolation of a wind turbine benchmark.In Proceedings of IFAC World Congress 2011, pages7086–7091, Milan, Italy, August-September 2011. doi:10.3182/20110828-6-IT-1002.00546.
K.E. Johnson, M.J.. Pao, L.Y.and Balas, and L.J. Fin-gersh. Control of variable-speed wind turbines - stan-dard and adaptive techniques for maximizing energycapture. IEEE Control Systems Magazine, 26(3):71–81,June 2006. doi: 10.1109/MCS.2006.1636311.
F. Kiasi, J. Prakash, S. Shah, and J.M. Lee. Fault de-tection and isolation of benchmark wind turbine us-ing the likelihood ratio test. In Proceedings of IFACWorld Congress 2011, pages 7079–7085, Milan, Italy,August-September 2011. doi: 10.3182/20110828-6-IT-1002.03535.
N. Laouti, N. Sheibat-Othman, and S. Othman. Supportvector machines for fault detection in wind turbines.In Proceedings of IFAC World Congress 2011, pages
7067–7072, Milan, Italy, August-September 2011. doi:10.3182/20110828-6-IT-1002.02560.
P.F. Odgaard and J. Stoustrup. Unknown input observerbased detection of sensor faults in a wind turbine. InProceedings of IEEE Multi-Conference on Systems andControl, pages 310–315, Yokohama, Japan, September2010. IEEE.
P.F. Odgaard, J. Stoustrup, and M. Kinnaert. Faulttolerant control of wind turbines a benchmark model.In Proceedings of the 7th IFAC Symposium on Fault De-tection, Supervision and Safety of Technical Processes,pages 155–160, Barcelona, Spain, June-July 2009. IFAC.doi: 10.3182/20090630-4-ES-2003.0090.
A.A. Ozdemir, P. Seiler, and G.J. Balas. Wind turbinefault detection using counter-based residual threshold-ing. In Proceedings of IFAC World Congress 2011, pages8289–8294, Milan, Italy, August-September 2011. doi:10.3182/20110828-6-IT-1002.01758.
P. Pisu and B. Ayalew. Robust fault diagnosis for ahorizontal axis wind turbine. In Proceedings of IFACWorld Congress 2011, pages 7055–7060, Milan, Italy,August- September 2011. doi: 10.3182/20110828-6-IT-1002.02540.
S. Simani, P. Castaldi, and M. Bonfe. Hybrid modelbasedfault detection of wind turbine sensors. In Proceedingsof IFAC World Congress 2011, pages 7061–7066, Milan,Italy, August-September 2011a. doi: 10.3182/20110828-6-IT-1002.01311.
S. Simani, P. Castaldi, and A. Tilli. Datadriven approachfor wind turbine actuator and sensor fault detectionand isolation. In Proceedings of IFAC World Congress2011, pages 8301–8306, Milan, Italy, August-September2011b. doi: 10.3182/20110828-6-IT-1002.00447.
F. Stoican, C.-F. Raduinea, and S. Olaru. Adapta-tion of set theoretic methods to the fault detectionof wind turbine benchmark. In Proceedings of IFACWorld Congress 2011, pages 8322–8327, Milan, Italy,August-September 2011. doi: 10.3182/20110828-6-IT-1002.01842.
C. Svard and M. Nyberg. Automated design of an fdi-system for the wind turbine benchmark. In Proceedingsof IFAC World Congress 2011, pages 8307–8315, Milan,Italy, August-September 2011. doi: 10.3182/20110828-6-IT-1002.00618.
X. Zhang, Q. Zhang, S. Zhao, R. M.G. Ferrari, M. M. Poly-carpou, and T. Parisini. Fault detection and isolationof the wind turbine benchmark: An estimation-basedapproach. In Proceedings of IFAC World Congress 2011,pages 8295–8300, Milan, Italy, August-Septemper 2011.doi: 10.3182/20110828-6-IT-1002.02808.