Embed Size (px)
Citation preview

スポット溶接最適化ロボットMOTOMAN-VS, MS, ES
シリーズ
スポット溶接最適化ロボットは,スポット溶接のほかハンドリングなどにも使うことができます。
品質及び環境マネジメントシス テ ム の 国 際 規 格 ISO9001, ISO14001を取得しています。
JQA-EM0202JQA-0813R009
QMS Accreditation

2
クラス最高性能
悪環境に対応
高速の低慣性ACサーボモータ適用と最新の制御技術によって,世界最高速度を実現しています。さらに,ロボット形状をスリム化し,手首許容モーメントは強化しています。
これまでのアプリケーションノウハウを継承した低床形のロボットコントローラです。外部3軸用ACサーボパックなど従来付加ロッカが必要であったオプションも標準キャビネットに内蔵可能であるため,容積比最大50%の削減を実現しています。速度制限機能やツール切り替え監視機能などの機能安全性能の向上で安全機能を強化しています。容積比 最大50%削減
手首部は,防水・防塵構造 (IP67適用 )により,ジャケットなしで水滴・ほこりの多い環境で使用可能です。
ショートプロセスへのトータルソリューション
新形コントローラDX200対応!スポット溶接における革新的「ショートプロセス」を提供します。
スペース省用途最適化を追求した構造・性能・機能によって,生産設備の最小化&省エネを実現します。
Hardware
マニピュレータ コントローラ DX200
エネルギー
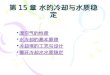
スポット溶接最適化ロボット ラインアップ
最大リーチ(mm)
100
0
200MS165
1000 2000 3000 4000
可搬質量
最大リーチ
1
2
1
2
110kg(100kg)*1
R2236mm
VS100
1
2
110kg(100kg)*1
R2236mm
1
2
88kg(80kg)*1
R2236mm
1
2
180kg(165kg)*1
R2702mm
MS2101
2
225kg(210kg)*1
R2702mm
1
2
200kg(186.5kg)*1
R3140mm
1
2
165kg(151.5kg)*1
R3140mm
棚置き
(kg)
可搬質量
MS100
MS80W
ES200RD
ES165RD
*1 : 手首先端にケーブル処理用フランジが取付く場合の値です。

3
高密度配置されたロボットのアーム間干渉を常時監視し,ぶつかりそうになった場合自動停止します。(プログラムミスによる衝突を防止 )
消費電力を節約してランニングコスト低減に貢献します。
干渉チェック機能*2
ショートプロセス新形ロボットは動作の自由度向上や形状の小形・スリム化などにより,用途最適化が更に進化しています。ロボットの高密度配置が可能で,お客様の生産設備の省スペース化に貢献します。このように工程の集約を可能とし,短時間生産・省スペース化などにより生産性向上に貢献する設備を「ショートプロセス」と呼んでいます。
・ロボットのスリム化による接近性向上
・7軸化によるフレキシビリティの向上
・コントローラの小形化による省スペース
・マルチコントローラによる衝突防止
・ 安全機能 (ロボットの動作領域制限 )による設備 スペースの削減
・生産ラインの短縮
・工程数の削減
・高効率生産
・品質向上
・省エネ
安全柵の最小化*3
省エネ
二重化CPU構成の「機能安全モジュール」で,ロボットとツールの位置監視をし,ツールに最適な範囲で動作を制限できます。これにより,ロボットの動作範囲より狭いエリアに安全柵を設置することができ,生産設備の省スペース化に貢献します。
*3 : 対応ロボット機種は,営業窓口までお問い合わせください。
Software
オプション
オプション
ロボットの小形化により消費電力を節約します。 ロボットの長時間停止の際,自動的にサーボオフします。
1台のCPUで最大8台のロボットのアーム間の衝突を防止
新形ロボットのソリューション
ショートプロセス
お客様へのメリット
MOTOMAN-LINK(コントローラ間ネットワーク接続 )で接続されたコントローラが,ロボット同士の干渉をリアルタイムにチェックして衝突を防止します。
省エネ効果
約25%ES200N
200kg可搬
ダウンサイズ
ロボット動作制御 次回指令まで待機
動作状態
モータ出力
ブレーキ
タイマ
ロボット待機中はモータ出力遮断し,ブレーキをかける
待機開始後一定時間経過後にブレーキをかける
〈条件〉1日24時間中,ロボット稼働が16時間で待機状態が8時間の場合
省エネ効果
約25%
MS80W 80kg可搬
*2 : 対応ロボット機種は,営業窓口までお問い合わせください。
仮想制限領域 +安全柵安全柵
従来の安全柵位置ロボット動作領域
複数領域 を組み合わせて監視でき,設定時間を短縮できます。
A
A B C
B
B
C
平面監視 :ロボットが平面,斜め天井などを超えないこと
C
領域内監視 :領域からロボットが出ないこと
領域外監視 :領域にロボットが進入しないこと
A
B
【従来】ロボット動作領域外に 安全柵が必要
【機能安全】省スペース化が可能

4
電動ガンの高速化
作業命令並列実行
3枚重ねスポット溶接
ショートプロセスへのトータルソリューション
ショートピッチ溶接での高速な動作
<タクトタイム> 従来設定 (NX100) ガンARM制御短縮 短縮 ガンARM制御 (DX200)
タクトタイムを 約20%短縮
ARM制御機能により,電動ガンの加減速特性,動作性能を最適化することで,電動ガンの能力を最大限に引き出し,溶接時間を短縮。また,CPU高速化と加圧制御の最適化でさらに溶接時間を短縮します。
摩耗補正(TWC-C)やガンチェンジ命令をエアカットのロボット動作と並行して実行し,タクトタイムを短縮します。
加圧力と溶接電流を同期して制御することで,高品質な3枚重ねスポット溶接を実現します。(開発中 )
板厚比の大きい3枚重ね溶接が可能スパッタレスで溶接品質が向上タクトタイム短縮ワークレイアウトの設計が簡易化
1
2
3従来は 2 の位置に到達後に一旦停止して命令を実行していましたが, 1 から 3 に移動しながら停止することなく命令を実行します。
オプション
2打点必要
1枚目
従来機種
切欠きが必要(プレス型が非常に高価 )
DX200
2枚目3枚目
可動電極
加圧力
溶接電流
固定電極
ワーク
1回目SVSPOT実行 SVSPOT実行
2回目 開放
1つの打点で同時3枚溶接
タクトタイムの短縮ワークレイアウトの設計簡易化
多段加圧機能
生産性高速く,高品質なスポット溶接を実現するための技術を搭載し,無駄のないロボット動作でタクトタイムを短縮します。
品質

5
アラーム発生時,異常の内容・原因・対策をプログラミングペンダント上に表示。トラブル発生時の対応をサポートします。
コントローラのパーツ交換時間短縮を実現し,トラブル発生後の復旧時間を短縮できます。(交換時間10分⇒8分 : 20%削減 )
また,エンコーダ交換をユニット方式で行うため,一般工具で作業が可能で作業時間も短縮できます。さらに,ゼロイング機能 (オプション )を活用することで,モータ・エンコーダ交換時に失われた原点位置を正確かつ短時間に復旧できます。
マルチウィンドウ表示機能 シミュレータMotoSimEG-VRC
トラブルシュート機能 パーツ交換時間短縮
異常内容
発生原因
対策(トラブルシュート)
プログラミングペンダントの画面に入出力や変数を表示したままで,プログラム動作確認が可能となり,教示・試運転効率が向上します。
ロボット動作だけの従来シミュレータではなく,実機の機能・操作・画面表示までを再現するバーチャルコントローラへ進化。ロボット操作の知識だけで簡単にシミュレーションできます。
オプション
操作楽々ティーチングとシミュレーションの操作性を向上し,立ち上げまでの時間を短縮します。
シミュレーション
メンテナンス簡単モニタ,トラブルシュート,構造上の改善などを追求しており,メンテナンス時間や故障時の復旧時間を短縮します。
トラブルシューティング

6
0
エア入口KQE12-03
装備ケーブルコネクタJL05-2A24-28PC (キャップ付き )相手側コネクタ JL05-6A24-28Sをご準備ください。
トランスサーモ用コネクタMS3100A14S-1S (キャップ付き )相手コネクタMS3106B14S-1Pをご準備ください。
外部パワー用コネクタJL05-2A18-1SC-F0(キャップ付き)相手コネクタJL05-6A18-1Pをご準備ください。
外部軸信号用コネクタJL05-2A20-29SC(キャップ付き)相手コネクタJL05-6A20-29Pをご準備ください。
装備ケーブルコネクタJL05-2A24-28SC(キャップ付き)相手コネクタJL05-6A24-28Pをご準備ください。
溶接一次電源用コネクタMS3100A36-3S(キャップ付き)相手コネクタMS3106B36-3Pをご準備ください。
DeviceNet用コネクタCM02-8DR5P-CF(D5)相手コネクタCM02A-8DP5S-Dをご準備ください。
冷却水OUT2KQE12-04
冷却水 IN2KQE12-04
冷却水 IN1KQE12-04
冷却水OUT1KQE12-04
C2BG3236 (サンケイ )溶接一次電源及びトランスサーモについてはボックス内に端子台を設けています。
42
ϕ 8H7 深さ : 14
ϕ 6H7 深さ : 10
ϕ 50
H7
ϕ 10
0h6
ϕ 80
6
40
6
8
230±0.1
195±0.1
19
5± 0
.1
38
52
30± 0
.1
45
5
608455153
19
5± 0
.1
ϕ8× 22
ϕ2× 12H7
244286
530
P点
540
870
210
320 1025 175
22361534
3770
1295
2456
37
51
718
L
S
98
3
45˚90˚
T
BRU
160°
155°
185˚
50
611.5 200
50
50
98.5
50
100
R2236
R718
180°
180°
C
A
B
32
0
280
230
400195±0.1
ϕ4×M8× 6.8深さ : 16
ϕ4×M8× 6.8深さ : 16
DeviceNet用コネクタ8R5L30相手コネクタ8A5006-32をご準備ください。
冷却水OUT1KQE12-03
冷却水 IN1KQE12-03
冷却水OUT2KQE12-03
冷却水 IN2KQE12-03
エア出口KQE12-03
6×M8× 6.8深さ : 14
ϕ
外形寸法及び動作範囲 単位 : mm : P点動作範囲
マニピュレータ標準仕様名 称 MOTOMAN-MS80W
ケーブル処理用フランジ有無 無 有形 式 YR-MS0080W-J00
構 造 垂直多関節形 (6自由度 )
可 搬 質 量 88 kg 80 kg
繰 り 返 し 位 置 決 め 精 度 *1 ±0.07 mm
動作範囲
S 軸 ( 旋 回 ) −180˚ ~ +180˚
L 軸 ( 下 腕 ) −90˚ ~ +155˚
U 軸 ( 上 腕 ) −185˚ ~ +160˚
R 軸 ( 手 首 旋 回 ) −360˚~ +360˚ −205˚~ +205˚
B 軸 ( 手 首 振 り ) −125˚~ +125˚ −120˚~ +120˚
T 軸 ( 手 首 回 転 ) −360˚~ +360˚ −180˚~ +180˚
最大速度
S 軸 ( 旋 回 ) 2.97 rad/s, 170˚/s
L 軸 ( 下 腕 ) 2.44 rad/s, 140˚/s
U 軸 ( 上 腕 ) 2.79 rad/s, 160˚/s
R 軸 ( 手 首 旋 回 ) 4.01 rad/s, 230˚/s
B 軸 ( 手 首 振 り ) 4.01 rad/s, 230˚/s
T 軸 ( 手 首 回 転 ) 6.11 rad/s, 350˚/s
許 容モーメント
R 軸 ( 手 首 旋 回 ) 408 N·m 389 N·m
B 軸 ( 手 首 振 り ) 408 N·m 389 N·m
T 軸 ( 手 首 回 転 ) 206 N·m 201 N·m
許容慣性モーメント(GD2/4)
R 軸 ( 手 首 旋 回 ) 30 kg·m2 28 kg·m2
B 軸 ( 手 首 振 り ) 30 kg·m2 28 kg·m2
T 軸 ( 手 首 回 転 ) 11 kg·m2 10.3 kg·m2
本 体 質 量 550 kg
設置環境
温 度 0 ~ +45˚C
湿 度 20~ 80%RH (結露のないこと)
振 動 4.9 m/s2以下
そ の 他 引火性及び腐食性ガス・液体がないこと 水,油,粉じんなどがかからないこと 電気的ノイズ源が近くにないこと
電 源 容 量*2 4.0 kVA
矢視 C
矢視 B
矢視 A
可搬質量 88kg(80kg)*,最大リーチ R2236mm
MOTOMAN-MS80W
艤装ケーブル装着時でもロボット幅が530mm以下であり,高密度配置によるスポット溶接ラインのショートプロセス化を実現。 手首許容慣性モーメントの拡大や最大リーチ2236mmの広い動作範囲により,フレキシブルな溶接ラインの構築に貢献します。
*1 : JIS B 8432に準拠しています。
*2 : 用途,動作パターンにより異なります。(注 )本表はSI単位系で記載しています。
小形・中形ガン対応のスリムスポット溶接最適化ロボット
* : 手首先端にケーブル処理用フランジが取付く場合の値です。

7
45°
B
200
P点
320 1020
38
50
C
4×M8 深さ : 16
S
装備ケーブルコネクタ(ケーシング側)JL05-2A24-28SC(キャップ付き)相手コネクタJL05-6A24-28Pをご準備ください。
装備コネクタメインキー位置
溶接一次電源用コネクタMS3100A36-3S(キャップ付き)相手コネクタMS3106B36-3Pをご準備ください。
外部軸パワー用コネクタJL05-2A18-1SC-F0(キャップ付き)相手コネクタJL05-6A18-1Pをご準備ください。
エアKQE12-03
冷却水3KQE12-03
T
冷却水1KQE12-03
冷却水2KQE12-03
冷却水4KQE12-03
4×M8 深さ : 14
2×M5 深さ : 9
2×M6 深さ : 11
10×M10 深さ : 15
2× 10H7 深さ : 15
16
7
31
.5H
7
14
5h6
ϕ
6092
16246
45
12
.5
27
.5
257
256
185°
160°
19
5± 0
.1
546
289
R2236
R491
90°
155°
966
394
1016
10098.5
28
0
153 455
608
45
5
230± 0
.1
320
19
5± 0
.1
195±0.1
230±0.1195±0.1
230
37
51
2456
949
185
1295
377315
36
14
82
34
9
41
45
43
74
0
22
36
23
5
87
05
40
L
RU
8× 22ϕ2× 12H7ϕ
ϕ
ϕ125
400
00B
外部軸信号用コネクタJL05-2A20-29SC(キャップ付き)相手コネクタJL05-6A20-29Pをご準備ください。
+24V用コネクタ1R4030相手コネクタCM03-J4Pをご準備ください。
DeviceNet用コネクタ8R5L30相手コネクタ8A5006-32DNをご準備ください。
冷却水4KQE12-04
27
27
溶接一次電源用ケーブル14mm2×1本ーAターミナルR14-822mm2×2本ーAターミナルR22-81.25mm2×3本ーAターミナル1.25-3
装備コネクタメインキー位置 冷却水1
KQE12-04
冷却水3KQE12-04
冷却水2KQE12-04
エアKQE12-03
DeviceNet用コネクタCM02-8DR5P-CF相手コネクタCM02A-8DP5S-Dをご準備ください。
+24V用コネクタCM03A-R4P-S-1相手コネクタCM03-P4Sをご準備ください。
装備ケーブルコネクタJL05-2A24-28PC(キャップ付き)相手コネクタJL05-6A24-28Sをご準備ください。
フィールドパス用カバー(ベース内に内径 12のチューブが内臓されています。)4×M3 深さ : 3.2
ϕ
A
外形寸法及び動作範囲 単位 : mm : P点動作範囲
マニピュレータ標準仕様名 称 MOTOMAN-MS100
ケーブル処理用フランジ有無 無 有形 式 YR-MS100/MH110-A00
構 造 垂直多関節形 (6自由度 )
可 搬 質 量 110 kg 100 kg
繰 り 返 し 位 置 決 め 精 度 *1 ±0.07 mm
動作範囲
S 軸 ( 旋 回 ) −180˚ ~ +180˚
L 軸 ( 下 腕 ) −90˚ ~ +155˚
U 軸 ( 上 腕 ) −185˚ ~ +160˚
R 軸 ( 手 首 旋 回 ) −360˚~ +360˚ −205˚~ +205˚
B 軸 ( 手 首 振 り ) −125˚~ +125˚ −120˚~ +120˚
T 軸 ( 手 首 回 転 ) −360˚~ +360˚ −180˚~ +180˚
最大速度
S 軸 ( 旋 回 ) 2.45 rad/s, 140˚/s
L 軸 ( 下 腕 ) 1.92 rad/s, 110˚/s
U 軸 ( 上 腕 ) 2.27 rad/s, 130˚/s
R 軸 ( 手 首 旋 回 ) 3.05 rad/s, 175˚/s
B 軸 ( 手 首 振 り ) 3.05 rad/s, 175˚/s
T 軸 ( 手 首 回 転 ) 4.44 rad/s, 255˚/s
許 容モーメント
R 軸 ( 手 首 旋 回 ) 721 N·m 696 N·m
B 軸 ( 手 首 振 り ) 721 N·m 696 N·m
T 軸 ( 手 首 回 転 ) 294 N·m
許容慣性モーメント(GD2/4)
R 軸 ( 手 首 旋 回 ) 60 kg·m2 58 kg·m2
B 軸 ( 手 首 振 り ) 60 kg·m2 58 kg·m2
T 軸 ( 手 首 回 転 ) 33.7 kg·m2 33 kg·m2
本 体 質 量 625 kg
設置環境
温 度 0 ~ +45˚C
湿 度 20~ 80%RH (結露のないこと)
振 動 4.9 m/s2以下
そ の 他 引火性及び腐食性ガス・液体がないこと 水,油,粉じんなどがかからないこと 電気的ノイズ源が近くにないこと
電 源 容 量*2 5.0 kVA
矢視 B
矢視 C
矢視 A
可搬質量 110kg(100kg)*,最大リーチ R2236mm
MOTOMAN-MS100
エアカット時間の短縮により,更なる生産性向上を実現 動作領域の拡大により,フレキシブルな溶接ラインの構築に貢献 更なる高密度・最適配置により,スポット溶接ラインのショートプロセス化を実現 ATC(オートツールチェンジャ)にも対応可能
*1 : JIS B 8432に準拠しています。
*2 : 用途,動作パターンにより異なります。(注 )本表はSI単位系で記載しています。
* : 手首先端にケーブル処理用フランジが取付く場合の値です。
小形・中形ガン対応のスリムスポット溶接最適化ロボット

8
P点
U R B
T
L
E
S
0
S
R T
エア Rc3/8タップ
DeviceNet用コネクタCM02-8DR5P-CF相手コネクタCM02A-80DP5S-Dをご準備ください。
10099601692246
27
.5
12
.54
5
230400
455153608
28
03
20
230±0.2
38
54
55
270314
584
320 1020 200
54
04
35
43
52
35
61
3
24
57
13
36
37
93
0
1469 22363705
R2236
155°
258
10
0
70°
685
82
6
14
5h6
16
4×M8 深さ:14
4×M8 深さ:16 2×M5深さ:9
125ϕ
8× 22ϕ2× 12H7ϕ
31
.5H
7ϕ ϕ
R460
2×M6深さ:11
外部軸パワー用コネクタJL05-2A18-1SC-F0(キャップ付き)相手コネクタJL05-6A18-1Pをご準備ください。
冷却水1Rc3/8タップ
冷却水2Rc3/8タップ
DeviceNet用コネクタ8R5L30相手コネクタ8A5006-32DNをご準備ください。
冷却水3Rc3/8タップ
冷却水4Rc3/8タップ
エアRc3/8タップ
+24V用コネクタ1R4030相手コネクタCM03-J4Pをご準備ください。
外部軸信号用コネクタJL05-2A20-29SC(キャップ付き)相手コネクタJL05-6A20-29Pをご準備ください。
装備ケーブルコネクタ(ケーシング側)JL05-2A24-28SC(キャップ付き)相手コネクタJL05-6A24-28Pをご準備ください。
溶接一次電源用コネクタMS3100A36-3S(キャップ付き)相手コネクタMS3106B36-3Pをご準備ください。
10×M10深さ:15ϕ2× 10H7
深さ:15
195±0.2
19
5±0
.2
19
5±0
.2
230±0.2195±0.2
90°
45°
45°
冷却水1Rc1/2タップ冷却水3Rc1/2タップ冷却水2Rc1/2タップ
冷却水4Rc1/2タップ
+24V用コネクタCM03A-R4P-S-1相手コネクタCM03-P4Sをご準備ください。
装備ケーブルコネクタJL05-2A24-28PC(キャップ付き)相手コネクタJL05-6A24-28Sをご準備ください。
溶接一次電源用ケーブル14mm2×1本 AターミナルR14-822mm2×2本 AターミナルR22-81.25mm2×3本 Aターミナル1.25-3
B
C
A
外形寸法及び動作範囲 単位 : mm : P点動作範囲
マニピュレータ標準仕様
矢視 C
矢視 B
矢視 A
名 称 MOTOMAN-VS100
ケーブル処理用フランジ有無 無 有形 式 YR-VS00100-A00
構 造 垂直多関節形 (7自由度 )
可 搬 質 量 110 kg 100 kg
繰 り 返 し 位 置 決 め 精 度 *1 ±0.12 mm
動作範囲
S 軸 ( 旋 回 ) −180˚ ~ +180˚
L 軸 ( 下 腕 ) −45˚ ~ +155˚
E 軸 ( 肘 ) −45˚ ~ +120˚
U 軸 ( 上 腕 ) −70˚ ~ +90˚
R 軸 ( 手 首 旋 回 ) −360˚~ +360˚ −205˚~ +205˚
B 軸 ( 手 首 振 り ) −125˚~ +125˚ −120˚~ +120˚
T 軸 ( 手 首 回 転 ) −360˚~ +360˚ −205˚~ +205˚
最大速度
S 軸 ( 旋 回 ) 2.45 rad/s, 140˚/s
L 軸 ( 下 腕 ) 1.92 rad/s, 110˚/s
E 軸 ( 肘 ) 1.92 rad/s, 110˚/s
U 軸 ( 上 腕 ) 2.27 rad/s, 130˚/s
R 軸 ( 手 首 旋 回 ) 3.05 rad/s, 175˚/s
B 軸 ( 手 首 振 り ) 3.05 rad/s, 175˚/s
T 軸 ( 手 首 回 転 ) 4.45 rad/s, 255˚/s
許 容モーメント
R 軸 ( 手 首 旋 回 ) 721 N·m 696 N·m
B 軸 ( 手 首 振 り ) 721 N·m 696 N·m
T 軸 ( 手 首 回 転 ) 294 N·m
許容慣性モーメント(GD2/4)
R 軸 ( 手 首 旋 回 ) 60 kg·m2 58 kg·m2
B 軸 ( 手 首 振 り ) 60 kg·m2 58 kg·m2
T 軸 ( 手 首 回 転 ) 33.7 kg·m2 33 kg·m2
本 体 質 量 780 kg
設置環境
温 度 0 ~ +45˚C
湿 度 20~ 80%RH (結露のないこと)
振 動 4.9 m/s2以下
そ の 他 引火性及び腐食性ガス・液体がないこと 水,油,粉じんなどがかからないこと 電気的ノイズ源が近くにないこと
電 源 容 量*2 5.5 kVA
*1 : JIS B 8432に準拠しています。
*2 : 用途,動作パターンにより異なります。(注 )本表はSI単位系で記載しています。
可搬質量 110kg(100kg)*,最大リーチ R2236mm
MOTOMAN-VS100
Lアーム中間にE軸を追加することで,業界初のLアーム長可変構造を実現! 有効動作領域が拡大したことにより, より幅の狭いレイアウトが実現可能! 更なる高密度・最適配置により,スポット溶接ラインのショートプロセス化を実現。また多品種製造ラインへの対応力も向上し, 多様化するお客様のご要望にお応えします。
業界初の高自由度スポット溶接最適化ロボット
* : 手首先端にケーブル処理用フランジが取付く場合の値です。

9
外形寸法及び動作範囲 単位 : mm : P点動作範囲
マニピュレータ標準仕様
装備ケーブルコネクタ(ベース側)JL05-2A24-28PC(キャップ付き)相手側コネクタJL05-6A24-28Sをご準備ください。
エア入口Rc3/8タップカバープラグ付き
1225 225
65
03
00
2702
P点
R2411
60°
76°
19°
R2702
R713
4°
147°
32
0
42
0
50
0
290450
295±0.12
50± 0
.1
18
5± 0
.1
18
5± 0
.1
210
230±0.1
25040
210
90°
27
.5 12
.54
5
120 6×M10 深さ : 14
6×M10 深さ : 14
344 92
16 604×M8 深さ : 14
2×M5 深さ : 9
2×M6 深さ : 11
4×M8 深さ : 14
344
276 349
125
92
8
8
970
3061
928
332
598
957
57
7
14
41
56
20
76
2
71
3
70
9
407
90
2450
0
15
3
220
ケ-ブル処理用フランジ
R515
230±0.1
30°
255 40
B
C
A
S
R B
T
L
U
8× 22ϕ
フィールドバスケーブル用チューブ(内径 12)(ベース内)
ϕ
フィールドバスケーブル用チューブ(内径 12)(Sヘッド上)
ϕ
2× 20H7ϕ
63
H7
ϕ
ϕ
2× 10H7 深さ : 8ϕ
2× 9H7 深さ : 8ϕ
325
11
50
2253
1
60
h6
矢視 C
矢視 B
矢視 A
許 容モーメント
R 軸 ( 手 首 旋 回 ) 1000 N·m 951 N·m
B 軸 ( 手 首 振 り ) 1000 N·m 951 N·m
T 軸 ( 手 首 回 転 ) 618 N·m
許容慣性モーメント(GD2/4)
R 軸 ( 手 首 旋 回 ) 90 kg·m2 88 kg·m2
B 軸 ( 手 首 振 り ) 90 kg·m2 88 kg·m2
T 軸 ( 手 首 回 転 ) 46.3 kg·m2
本 体 質 量 970 kg
設置環境
温 度 0 ~ +45˚C
湿 度 20 ~ 80%RH (結露のないこと )
振 動 4.9 m/s2以下
そ の 他 引火性及び腐食性ガス・液体がないこと 水,油,粉じんなどがかからないこと 電気的ノイズ源が近くにないこと
電 源 容 量*2 5.0 kVA
名 称 MOTOMAN-MS165
ケーブル処理用フランジ有無 無 有形 式 YR-MS165/MH180-A00
構 造 垂直多関節形 (6自由度 )
可 搬 質 量 180 kg 165 kg
繰 り 返 し 位 置 決 め 精 度 *1 ±0.2 mm
動作範囲
S 軸 ( 旋 回 ) −180˚ ~ +180˚
L 軸 ( 下 腕 ) −60˚ ~ +76˚
U 軸 ( 上 腕 ) −147˚ ~ +90˚
R 軸 ( 手 首 旋 回 ) −360˚~ +360˚ −210˚~ +210˚
B 軸 ( 手 首 振 り ) −130˚ ~ +130˚
T 軸 ( 手 首 回 転 ) −360˚~ +360˚ −210˚~ +210˚
最大速度
S 軸 ( 旋 回 ) 2.18 rad/s, 125˚/s
L 軸 ( 下 腕 ) 2.01 rad/s, 115˚/s
U 軸 ( 上 腕 ) 2.18 rad/s, 125˚/s
R 軸 ( 手 首 旋 回 ) 3.18 rad/s, 182˚/s
B 軸 ( 手 首 振 り ) 3.05 rad/s, 175˚/s
T 軸 ( 手 首 回 転 ) 4.63 rad/s, 265/s
*1 : JIS B 8432に準拠しています。
*2 : 用途,動作パターンにより異なります。(注 )本表はSI単位系で記載しています。
可搬質量 180kg(165kg)*,最大リーチ R2702mm
MOTOMAN-MS165
新制振制御を開発し,従来比最大35%のタクトタイム短縮を実現 艤装時の手首部動作範囲を拡大し,1台あたりの打点数の増加を実現 ベース面積とロボット幅の大幅削減を実現し設備の省スペース化に貢献
更なる生産性向上を実現したスリムスポット溶接最適化ロボット
* : 手首先端にケーブル処理用フランジが取付く場合の値です。

10
外形寸法及び動作範囲 単位 : mm : P点動作範囲
マニピュレータ標準仕様
2× 10H7 深さ :8
2× 9H7 深さ :8
6×M10タップ 深さ :12
6×M10タップ 深さ :12
8
8
ϕ
63
H7
ϕ
16
0h6
ϕ
C
B
8×M12タップ深さ :24
S
LU
R
B
T
R3140R1000
R1212
R873
36
55
55
2× 16H7ϕ8× 22ϕ 353±0.1
290±0.1 290±0.1
73
56
40
54
0
290±
0.1
290±
0.1
350±
0.1
2× 20H7ϕ
893640
540290±0.1 290±0.1
エア入口PT3/8タップカバープラグ付き
装備ケーブルコネクタ (ベース側 )JL05-2A28-21PC (キャップ付き )相手側コネクタ JL05-6A28-21をご準備ください。
153250
2293
1150740
130˚
079
5
28˚
0
12
25
82
22
5
80°
78°112°
1932
31
40
1212
1107
20575
100
45
0
0
289
310
85
456
22
746
2295
2850
A
P点
78˚
73
2
180˚
180˚
ϕ
125ϕ
92ϕ
許 容モーメント
R 軸 ( 手 首 旋 回 ) 921 N·m 868 N·m
B 軸 ( 手 首 振 り ) 921 N·m 868 N·m
T 軸 ( 手 首 回 転 ) 490 N·m
許容慣性モーメント(GD2/4)
R 軸 ( 手 首 旋 回 ) 85 kg·m2 85 kg·m2
B 軸 ( 手 首 振 り ) 85 kg·m2 85 kg·m2
T 軸 ( 手 首 回 転 ) 45 kg·m2
本 体 質 量 1730 kg
設置環境
温 度 0 ~ +45˚C
湿 度 20 ~ 80%RH (結露のないこと )
振 動 4.9 m/s2以下
そ の 他 引火性及び腐食性ガス・液体がないこと 水,油,粉じんなどがかからないこと 電気的ノイズ源が近くにないこと
電 源 容 量*2 5.0 kVA
名 称 MOTOMAN-ES165RD
ケーブル処理用フランジ有無 無 有形 式 YR-ES165RD-J00
構 造 垂直多関節形 (6自由度 )
可 搬 質 量 165 kg 151.5 kg
繰 り 返 し 位 置 決 め 精 度 *1 ±0.2 mm
動作範囲
S 軸 ( 旋 回 ) −180˚ ~ +180˚
L 軸 ( 下 腕 ) −130˚ ~ +80˚
U 軸 ( 上 腕 ) −112˚ ~ +208˚
R 軸 ( 手 首 旋 回 ) −360˚~ +360˚ −205˚~ +205˚
B 軸 ( 手 首 振 り ) −130˚~ +130˚ −120˚~ +120˚
T 軸 ( 手 首 回 転 ) −360˚~ +360˚ −180˚~ +180˚
最大速度
S 軸 ( 旋 回 ) 1.83 rad/s, 105˚/s
L 軸 ( 下 腕 ) 1.83 rad/s, 105˚/s
U 軸 ( 上 腕 ) 1.83 rad/s, 105˚/s
R 軸 ( 手 首 旋 回 ) 3.05 rad/s, 175˚/s
B 軸 ( 手 首 振 り ) 2.62 rad/s, 150˚/s
T 軸 ( 手 首 回 転 ) 4.19 rad/s, 240˚/s
*1 : JIS B 8432に準拠しています。
*2 : 用途,動作パターンにより異なります。(注 )本表はSI単位系で記載しています。
矢視 C
矢視 B
矢視 A
可搬質量 165kg(151.5kg)*,最大リーチ R3140mm
MOTOMAN-ES165RD
可搬質量165㎏ (151.5㎏ )*で,大形スポットガンに対応可能。 動作領域が広く,フレキシブルな溶接ラインの構築に貢献
棚置きタイプの大形スポット溶接最適化ロボット

11
外形寸法及び動作範囲 単位 : mm : P点動作範囲
マニピュレータ標準仕様
10
9
6×M10 深さ :14
6×M10 深さ :14
125ϕ
30°
92ϕ
63
H7
ϕ
18
0h6
ϕ
6×M6 深さ :11
4×M8 深さ :14
344
255
120
27
.5 12
.54
5
R2702
R515
R713
9216 60
2×M5 深さ :9ケーブル処理用フランジ
4×M8 深さ :14
エア入口Rc 3/8カバープラグ付き
装備ケーブルコネクタ(ベース側)JL05-2A24-28PC(キャップ付き)相手側コネクタJL05-6A24-28Sをご準備ください。
40
450 290
500
420
230±0.1 230±0.1
185±
0.1
185±
0.1
250±
0.1
295±0.1
50
0
42
03
20
266
276332
9
407
598
928
957
349
2× 20H7ϕ4×2× 22ϕ
344
30612702
250
15
33
00
P点
S
L
R
U
B
T
11
50
65
0
1441
76
2
71
3
70
95
77
56
2
2253
1225
91
3252450
90°
60°
4°
76°
R2411
19° 147°
970
(275)220
フィールドバスケーブル用チューブ(内径 12)(ベース内)
ϕ
フィールドバスケーブル用チューブ(内径 12)(Sヘッド上)
ϕ
250
14
41
1441C
A
B
2× 9H7 深さ :8ϕ
2× 10H7 深さ :8ϕ
矢視 C
矢視 B
矢視 A
許 容モーメント
R 軸 ( 手 首 旋 回 ) 1372 N·m 1323 N·m
B 軸 ( 手 首 振 り ) 1372 N·m 1323 N·m
T 軸 ( 手 首 回 転 ) 735 N·m
許容慣性モーメント(GD2/4)
R 軸 ( 手 首 旋 回 ) 145 kg·m2 143 kg·m2
B 軸 ( 手 首 振 り ) 145 kg·m2 143 kg·m2
T 軸 ( 手 首 回 転 ) 84 kg·m2
本 体 質 量 1000 kg
設置環境
温 度 0 ~ +45˚C
湿 度 20 ~ 80%RH (結露のないこと )
振 動 4.9 m/s2以下
そ の 他 引火性及び腐食性ガス・液体がないこと 水,油,粉じんなどがかからないこと 電気的ノイズ源が近くにないこと
電 源 容 量*2 5.0 kVA
名 称 MOTOMAN-MS210
ケーブル処理用フランジ有無 無 有形 式 YR-MS210/MH225-A00
構 造 垂直多関節形 (6自由度 )
可 搬 質 量 225 kg 210 kg
繰 り 返 し 位 置 決 め 精 度 *1 ±0.2 mm
動作範囲
S 軸 ( 旋 回 ) −180˚ ~ +180˚
L 軸 ( 下 腕 ) −60˚ ~ +76˚
U 軸 ( 上 腕 ) −147˚ ~ +90˚
R 軸 ( 手 首 旋 回 ) −360˚~ +360˚ −210˚~ +210˚
B 軸 ( 手 首 振 り ) −125˚ ~ +125˚
T 軸 ( 手 首 回 転 ) −360˚~ +360˚ −210˚~ +210˚
最大速度
S 軸 ( 旋 回 ) 2.09 rad/s, 120˚/s
L 軸 ( 下 腕 ) 1.69 rad/s, 97˚/s
U 軸 ( 上 腕 ) 2.01 rad/s, 115˚/s
R 軸 ( 手 首 旋 回 ) 2.53 rad/s, 145˚/s
B 軸 ( 手 首 振 り ) 2.53 rad/s, 145˚/s
T 軸 ( 手 首 回 転 ) 3.84 rad/s, 220˚/s
*1 : JIS B 8432に準拠しています。
*2 : 用途,動作パターンにより異なります。(注 )本表はSI単位系で記載しています。
可搬質量 225kg(210kg)*,最大リーチ R2702mm
MOTOMAN-MS210
新制振制御を開発し,従来比最大35%のタクトタイム短縮を実現 艤装時の手首部動作範囲を拡大し,1台あたりの打点数の増加を実現 ベース面積とロボット幅の大幅削減を実現し設備の省スペース化に貢献
更なる生産性向上を実現した大形スポット溶接最適化ロボット
* : 手首先端にケーブル処理用フランジが取付く場合の値です。

12
外形寸法及び動作範囲 単位 : mm : P点動作範囲
マニピュレータ標準仕様
可搬質量 200kg(186.5kg)*,最大リーチ R3140mm
MOTOMAN-ES200RD
可搬質量200㎏ (186.5㎏ )*で,大形スポットガンに対応。 動作領域が広く,フレキシブルな溶接ラインの構築に貢献
棚置きタイプの大形スポット溶接最適化ロボット
* : 手首先端にケーブル処理用フランジが取付く場合の値です。
エア入口PT3/8タップカバープラグ付き
6×M10タップ 深さ :12
6×M10タップ 深さ :12
8
8
2× 9H7 深さ :8ϕϕ2× 10H7 深さ :86
3H
7ϕ
18
0h6
ϕ
装備ケーブルコネクタ (ベース側 )JL05-2A28-21PC (キャップ付き )相手側コネクタ JL05-6A28-21Sをご準備ください。
ϕ2× 16H7
54
0
73
56
40
893
64035
0±0.
1
290±
0.1
290±0.1290±0.1540
353±0.1290±0.1290±0.1
2× 20H7
290±
0.1
0
1932
3140
564
42
766
2295
2850
1117
1232
74
1
31
03
04 0
A
C
B S
LU
B
T
8×M12タップ深さ :24
153250
78˚
2293
1150740
130˚
079
5
28˚
12
25
91
25
0
80˚
78˚107˚
10
04
50
85
20575
P点
R
R3140R1000
R1232
36
5555
180˚
180˚
R873
ϕ
8× 22ϕ
125ϕ
92ϕ
矢視 C
矢視 B
矢視 A
許 容モーメント
R 軸 ( 手 首 旋 回 ) 1344 N·m 1291 N·m
B 軸 ( 手 首 振 り ) 1344 N·m 1291 N·m
T 軸 ( 手 首 回 転 ) 715 N·m
許容慣性モーメント(GD2/4)
R 軸 ( 手 首 旋 回 ) 143 kg·m2 141 kg·m2
B 軸 ( 手 首 振 り ) 143 kg·m2 141 kg·m2
T 軸 ( 手 首 回 転 ) 80 kg·m2
本 体 質 量 1800 kg
設置環境
温 度 0 ~ +45˚C
湿 度 20 ~ 80%RH (結露のないこと )
振 動 4.9 m/s2以下
そ の 他 引火性及び腐食性ガス・液体がないこと 水,油,粉じんなどがかからないこと 電気的ノイズ源が近くにないこと
電 源 容 量*2 5.0 kVA
名 称 MOTOMAN-ES200RD
ケーブル処理用フランジ有無 無 有形 式 YR-ES200RD-J00
構 造 垂直多関節形 (6自由度 )
可 搬 質 量 200 kg 186.5 kg
繰 り 返 し 位 置 決 め 精 度 *1 ±0.2 mm
動作範囲
S 軸 ( 旋 回 ) −180˚ ~ +180˚
L 軸 ( 下 腕 ) −130˚ ~ +80˚
U 軸 ( 上 腕 ) −107˚ ~ +208˚
R 軸 ( 手 首 旋 回 ) −360˚~ +360˚ −205˚~ +205˚
B 軸 ( 手 首 振 り ) −125˚~ +125˚ −120˚~ +120˚
T 軸 ( 手 首 回 転 ) −360˚~ +360˚ −180˚~ +180˚
最大速度
S 軸 ( 旋 回 ) 1.57 rad/s, 90˚/s
L 軸 ( 下 腕 ) 1.48 rad/s, 85˚/s
U 軸 ( 上 腕 ) 1.48 rad/s, 85˚/s
R 軸 ( 手 首 旋 回 ) 2.11 rad/s, 120˚/s
B 軸 ( 手 首 振 り ) 2.11 rad/s, 120˚/s
T 軸 ( 手 首 回 転 ) 3.32 rad/s, 190˚/s
*1 : JIS B 8432に準拠しています。
*2 : 用途,動作パターンにより異なります。(注 )本表はSI単位系で記載しています。

13
ロボットコントローラ DX200
項 目 仕 様
構 造 防じん構造 IP54
外 形 寸 法 600 (幅 )×520 (奥行き )×730 (高さ ) (外部3軸対応可)
概 略 質 量 100 kg 以下
冷 却 方 式 間接冷却
周 囲 温 度 通電時 : 0~ +45°C,保管時 : −10~ +60°C
相 対 湿 度 最大90% ( 結露のないこと)
電 源 仕 様三相AC200 V (+10%,−15%) 50/60 Hz (±2%) 三相AC220 V (+10%,−15%) 60 Hz (±2%)
接 地 D種 ( 接地抵抗100Ω以下専用接地 )
入 出 力 信 号専用信号:入力 28,出力 7
汎用信号:入力 40,出力 40
最大入出力信号 ( オプション) : 入力 4096,出力 4096
位 置 制 御 方 式 シリアルエンコーダ
メ モ リ 容 量JOB : 200000ステップ,10000ロボット命令CIOラダー : 20000ステップ
拡 張 ス ロ ット PCI : 2スロット
LAN(上位接続 ) 1個 (10BASE-T/100BASE-TX)
シ リ ア ル I/F RS-232C : 1個
制 御 方 式 ソフトウェアサーボ
ドライブユニット ACサーボ用サーボパック(9軸まとめ)
塗 装 色前面 : ライトグレー(マンセルN7.7相当)本体 : ダークグレー(マンセルN3相当)
項 目 仕 様
外 形 寸 法 169 (幅 )× 314.5 (高さ )× 50 (厚さ ) mm
概 略 質 量 0.990 kg
材 質 強化プラスチック
操 作 機 器
選択キー,軸操作キー,数値/アプリケーションキー,キー付きモード切り替えスイッチ (ティーチモード,プレイモード,リモートモード ),非常停止ボタン,イネーブルスイッチ,コンパクトフラッシュカード I/F 装備 (コンパクトフラッシュはオプション ),USBポート (1ポート ) 装備
デ ィ ス プ レ イ5.7インチカラー LCD,タッチパネル640×480ドット(漢字,ひらがな,カタカナ,英数字,その他 )
保 護 等 級 IP65
ケ ー ブ ル 長 標準 : 8 m,最大 (オプション ) : 36 m(延長ケーブル追加)
コントローラ DX200
プログラミングペンダント 標準仕様
標準仕様

安全上のご注意
ご使用の前に取扱説明書とその他の付属書類などをすべて熟読し,正しくご使用ください。このカタログに記載の製品は,一般産業用ロボットMOTOMAN(モートマン)です。MOTOMAN の故障や誤操作が直接人命を脅かしたり,人体に危害を及ぼすおそれがある用途に使用する場合は,その都度検討が必要ですので当社営業窓口までご照会ください。本資料中の適用写真は,分かりやすく説明するために安全さくなど法令法規などで定められた安全のための機器,装置を取り除いて撮影しています。また,イラストなどはイメージを表現したものです。
・・
・
MOTOMAN-VS, MS, ESシリーズ
製造・販売
資料番号 KAJP C940440 21F <8>-0
Published in Japan 2016年 2月
本製品の最終使用者が軍事関係であったり,用途が兵器などの製造用である場合には,「外国為替及び外国貿易法」の定める輸出規制の対象となることがありますので,輸出される際には十分な審査及び必要な輸出手続きをお取りください。製品改良のため,定格,仕様,寸法などの一部を予告なしに変更することがあります。この資料の内容についてのお問い合わせは,当社代理店もしくは,上記の営業部門にお尋ねください。© 2009-2016 YASKAWA ELECTRIC CORPORATION
◆製品・技術情報サイト http://www.e-mechatronics.com/“e-mechatronics.com”は,(株 )安川電機が運営する製品・技術・販売・サービス情報を提供するサイトです。
東部営業部第一営業課
第二営業課
第三営業課
埼玉県さいたま市北区宮原町 2-77-3 〒331-0812 TEL (048)871-6892 FAX (048)871-6920
埼玉県さいたま市北区宮原町 2-77-3 〒331-0812 TEL (048)871-6893 FAX (048)871-6920
埼玉県さいたま市北区宮原町 2-77-3 〒331-0812 TEL (048)871-6894 FAX (048)871-6920
埼玉県さいたま市北区宮原町 2-77-3 〒331-0812 TEL (048)871-6895 FAX (048)871-6920
西部営業部大阪営業課
広島営業課
九州営業課
大阪市北区堂島 2-4-27 新藤田ビル 4 階 〒530-0003 TEL (06)6346-4533 FAX (06)6346-4556
大阪市北区堂島 2-4-27 新藤田ビル 4 階 〒530-0003 TEL (06)6346-4533 FAX (06)6346-4556
広島市西区横川町 2-7-19 横川メディカルプラザ 6 階 〒733-0011 TEL (082)503-5833 FAX (082)503-5834
北九州市八幡西区黒崎城石 2-1 〒806-0004 TEL (093)645-7735 FAX (093)645-7736
クリーンロボット営業部
第一営業課
第二営業課
北九州市八幡西区黒崎城石 2-1 〒806-0004 TEL (093)645-7874 FAX (093)645-7736
埼玉県さいたま市北区宮原町 2-77-3 〒331-0812 TEL (048)871-6897 FAX (048)871-6920
北九州市八幡西区黒崎城石 2-1 〒806-0004 TEL (093)645-7874 FAX (093)645-7736
塗装ロボット営業部
名古屋営業
大 阪 営 業
海 外 営 業
埼玉県さいたま市北区宮原町 2-77-3 〒331-0812 TEL (048)871-6891 FAX (048)871-6920
愛知県みよし市根浦町 2-3-1 〒470-0217 TEL (0561)36-9324 FAX (0561)36-9312
大阪市北区堂島 2-4-27 新藤田ビル 4 階 〒530-0003 TEL (06)6346-4533 FAX (06)6346-4556
北九州市八幡西区黒崎城石 2-1 〒806-0004 TEL (093)645-8042 FAX (093)645-7736
中部営業部豊田第一営業課
豊田第二営業課
名古屋営業課
浜松営業課
安川電機では,お客様に安心してご使用いただけるように,グローバルなサービスネットワークを準備しています。世界各国に現地法人及び代理店を設置し,お客様のご要望にお応えします。拠点情報の詳細は,下記webサイトをご参照ください。http://www.e-mechatronics.com/contact/afterservice/robot/oversea.html
グローバルサービスネットワーク
バイオメディカル事業統括部
バイオメディカル推進部
東京都港区海岸1-16-1 ニューピア竹芝サウスタワー 6 階 〒105-6891 TEL (03)5402-4560 FAX (03)5402-4408
東京都港区海岸1-16-1 ニューピア竹芝サウスタワー 6 階 〒105-6891
TEL (03)5402-4560 FAX (03)5402-4408
愛知県みよし市根浦町 2-3-1 〒470-0217 TEL (0561)36-9324 FAX (0561)36-9312
愛知県みよし市根浦町 2-3-1 〒470-0217 TEL (0561)36-9326 FAX (0561)36-9312
愛知県みよし市根浦町 2-3-1 〒470-0217 TEL (0561)36-9327 FAX (0561)36-9312
愛知県みよし市根浦町 2-3-1 〒470-0217 TEL (0561)36-9324 FAX (0561)36-9312
静岡県浜松市中区砂山町 350 浜松駅南ビルディング 13 階 〒430-0926 TEL (053)456-2479 FAX (053)453-3705
北九州市八幡西区黒崎城石 2 - 1 〒806-0004 TEL (093)645-7703 FAX (093)645-7802
株式会社 安川電機ロボット事業部
15-11-38