Embed Size (px)
Citation preview
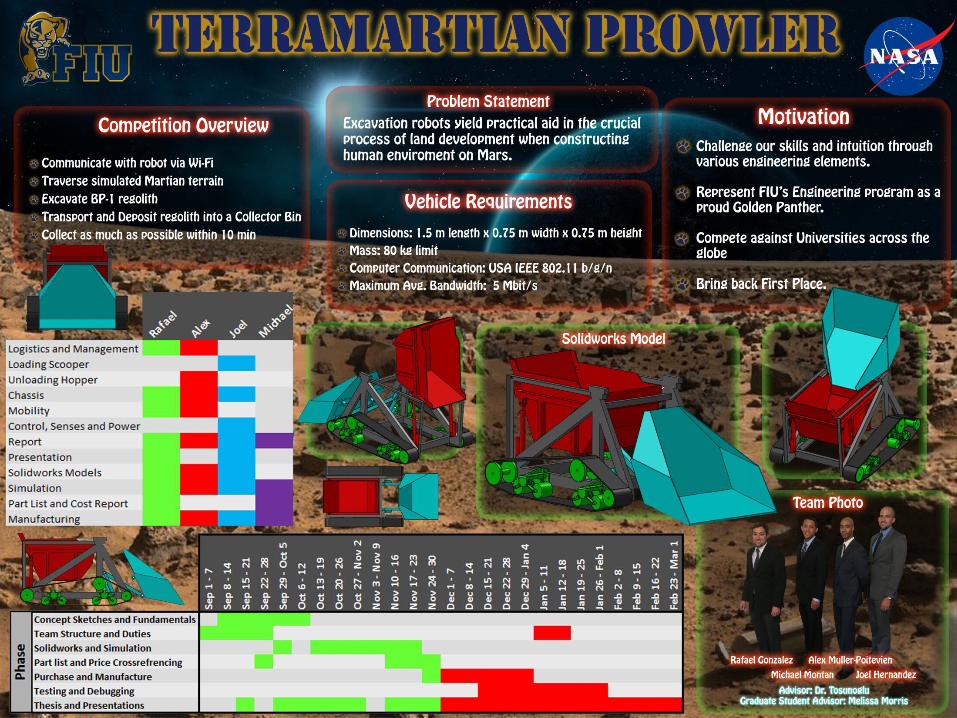
FIU TERRAMARTIAN
ROBOTICS
Joel Hernandez
Alex Muller-Poitevien
Rafael Gonzalez
Michael Montan
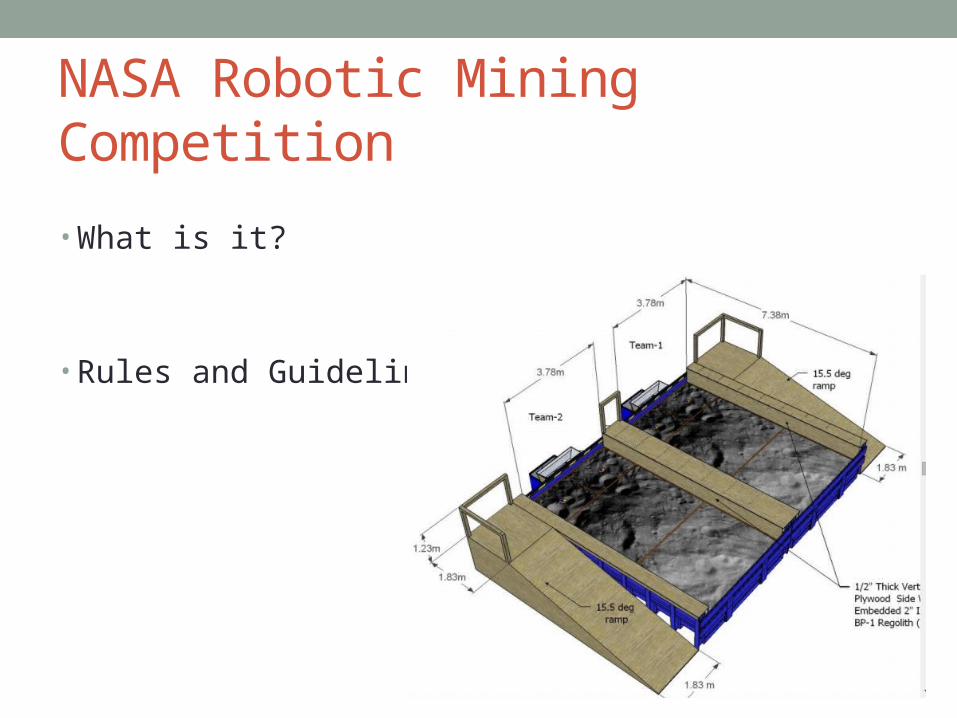
NASA Robotic Mining Competition
• What is it?
• Rules and Guidelines.

Competition Examples
Subsystem Division• Chassis
• Loading Hopper
• Unloading Hopper
• Movement
• Control, Senses and Power (CSP)• Electrical / Power• Programming
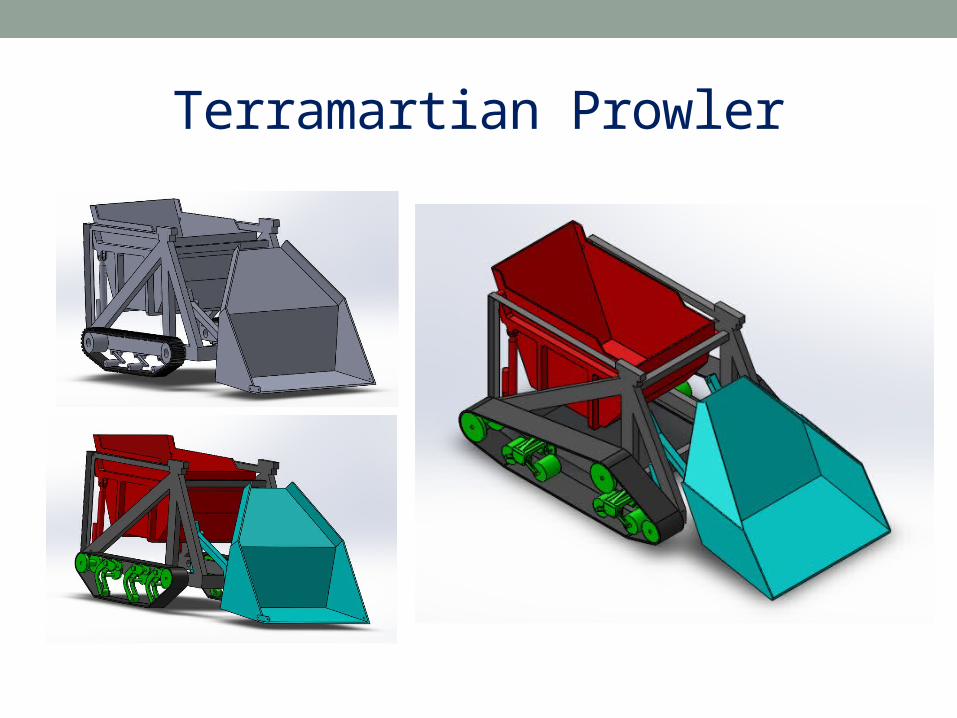
Terramartian Prowler

Chassis• Maximum Dimension: 1.5m x 0.5m x 1.0m
• Maximum Weight: 80kg
• Material: Recycled
Aluminum
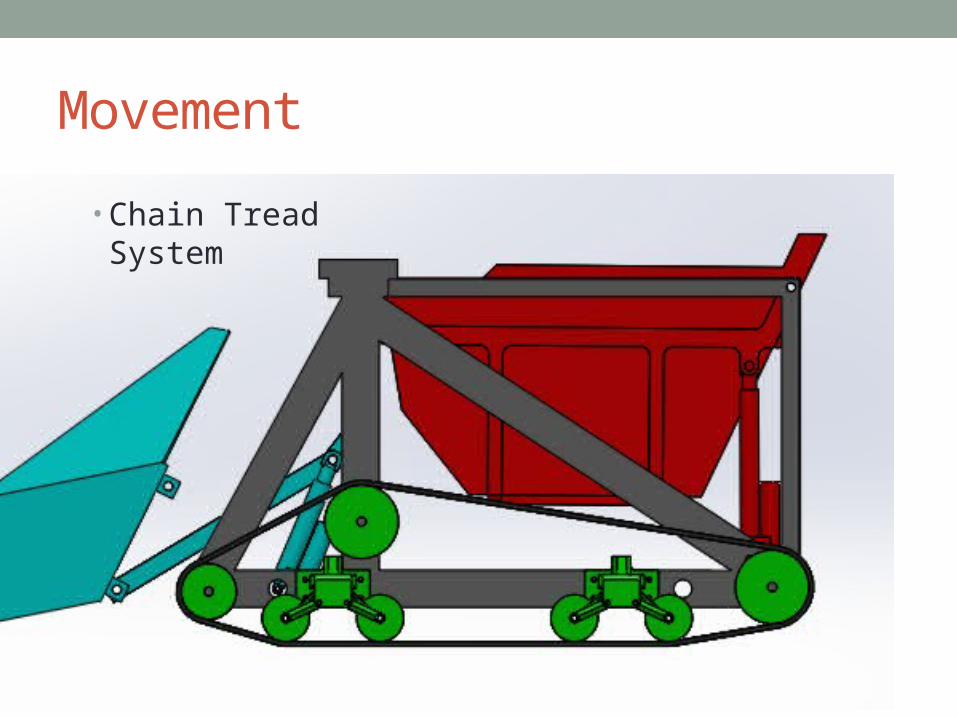
Movement
• Chain Tread System
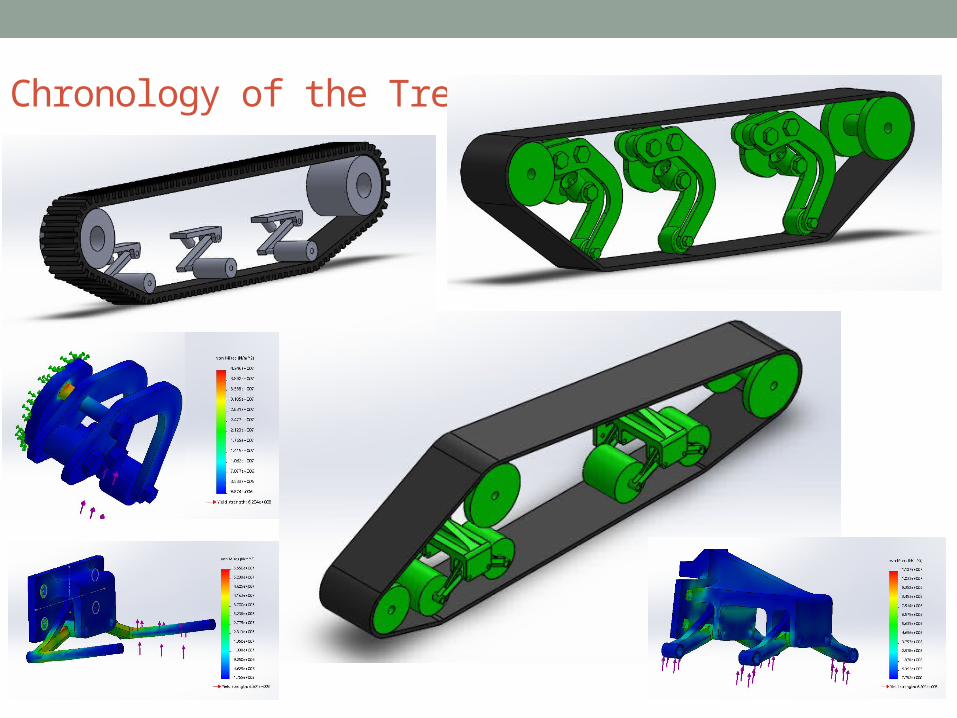
Chronology of the Tread
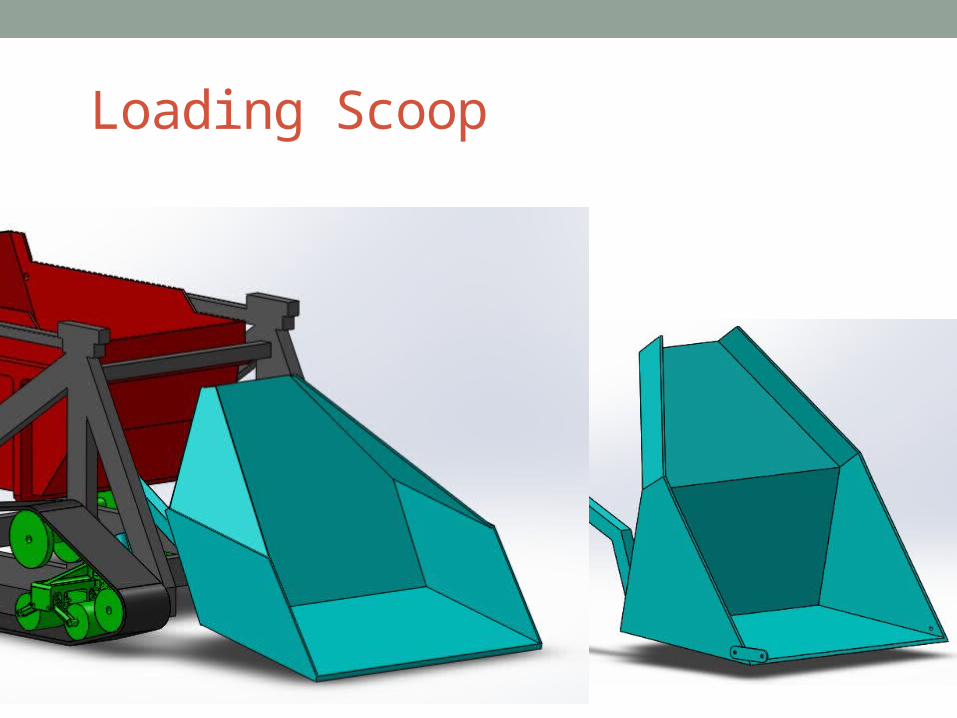
Loading Scoop
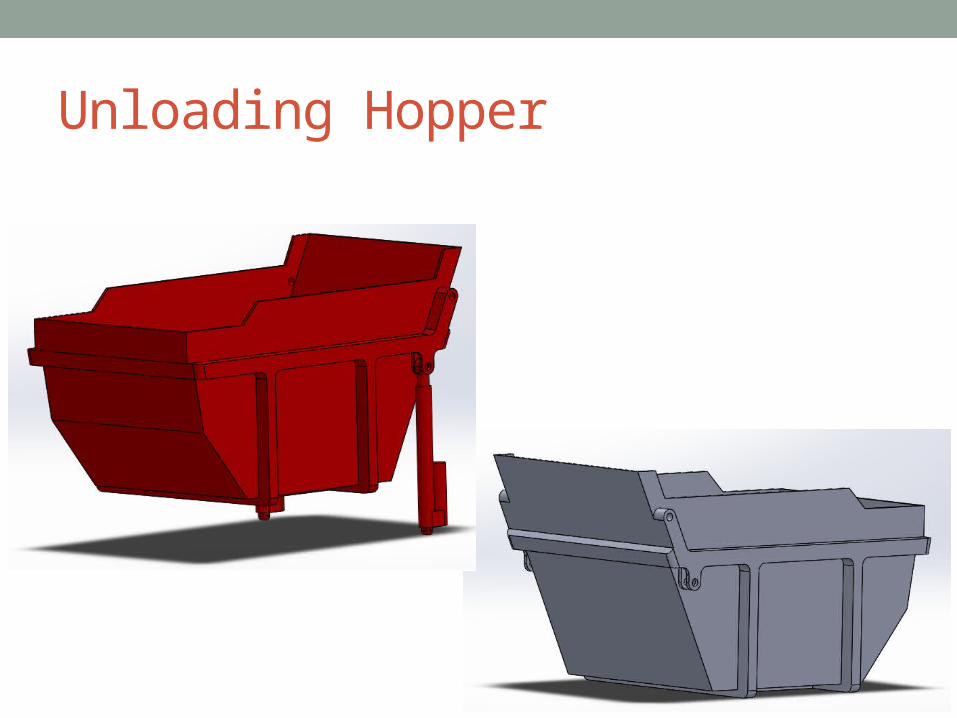
Unloading Hopper
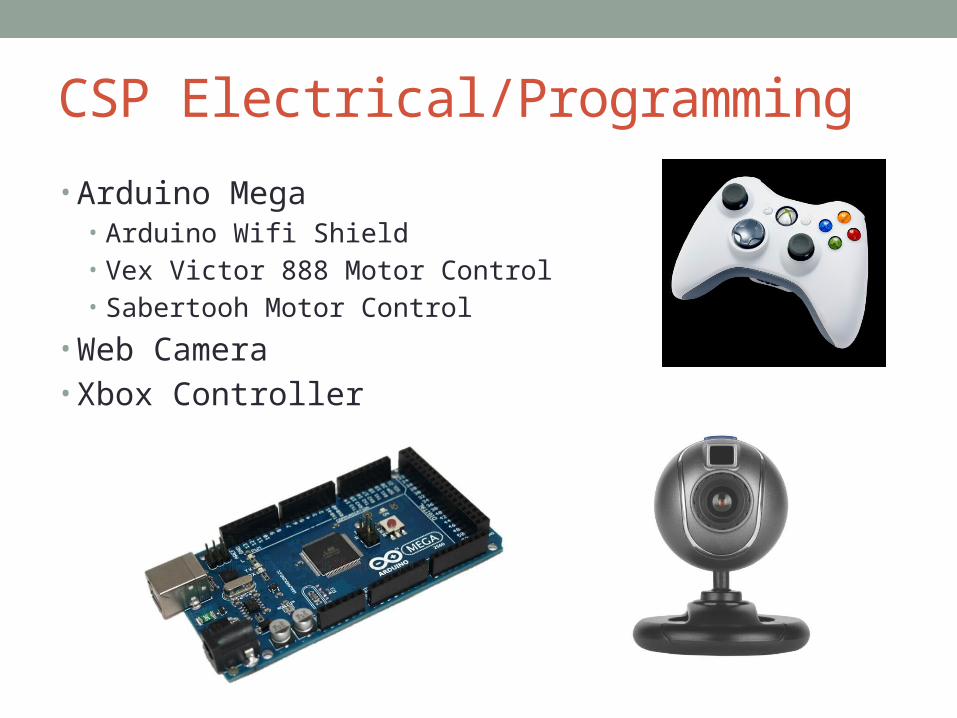
CSP Electrical/Programming
• Arduino Mega• Arduino Wifi Shield• Vex Victor 888 Motor Control• Sabertooh Motor Control
• Web Camera• Xbox Controller
Global Learning
• Several universities around the world participate in the competition.
• Create manual in English, Spanish, and German.
• The research on the Martian regolith may be capable of being implemented to various minerals found on earth.
• Publish a paper of our design and results.
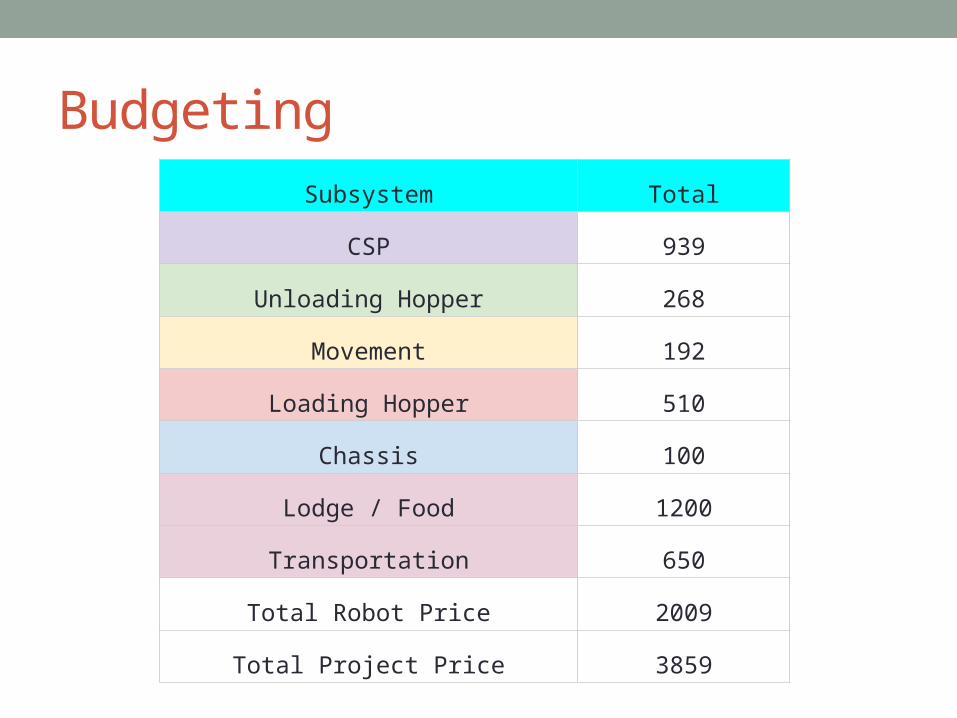
Budgeting
Subsystem Total
CSP 939
Unloading Hopper 268
Movement 192
Loading Hopper 510
Chassis 100
Lodge / Food 1200
Transportation 650
Total Robot Price 2009
Total Project Price 3859
Standards Used• IPC (Association Connecting Electronics Industries)
• Circuits, circuit boards, electronics
• AMT (Association for Manufacturing Technology)• Manufacturing of tread system, hopper…
• CEA (Consumer Electronics Association)• Xbox controller
• NEMA (National Electrical Manufacturers Association)• Motors, batteries
• ASTM (American Society for Testing and Materials)• Design of loading scooper
Conclusion and Next Steps
• SolidWorks Manufacturing Drawings
• Stress analysis of all parts
• Chassis Modifications
• Order and prepare parts for assembly
• Begin programming the Arduino board