Embed Size (px)
Citation preview

Master Thesis - KTH - 2018 1 Mathilde Perrocheau
Flutter Prediction in Transonic Regime
Mathilde Perrocheau KTH supervisor: U. Ringertz, Dassault Aviation supervisor: N. Forestier
Royal Institute of Technology, 100 44 Stockholm, Sweden Master thesis: 4th of September 2017 – 2nd of March 2018
Abstract: The flutter is a dangerous aeroelastic instability that can cause dramatic failures. It is important to evaluate in which conditions it can occur to ensure the safety of the pilots and the passengers. As flight tests are very expensive and hazardous, the need for efficient and trustworthy numerical tools becomes essential. This report focuses on two methods to predict the flutter conditions in the transonic domain. To evaluate the accuracy of these tools, their results are compared to experimental data gathered during a wind-tunnel test. The influence of the Mach number and the angle of attack on the flutter conditions is studied and physical explanations are put forward.
Introduction
As aircraft are widely used in civil and military applications, they undergo numerous tests to ensure the safety of the pilots and the passengers. Manufacturers have thus to perform analyses for their aircraft to pass these tests and to be put into use. Among others, aeroelastic phenomena are studied. They occur because of the interactions between the elastic structure and the fluid surrounding the aircraft. One of the aeroelastic phenomena that has to be investigated is called flutter.
This dynamic phenomenon occurs when the aeroelastic system is oscillating. It is due to a combination of unsteady flow coupled with structural vibrations. In specific flight conditions, the amplitude of the oscillations grows with time and the system becomes unstable. This can lead to dramatic structural failure and thus must be considered during the conception process.
Manufacturers need to evaluate all the flight conditions at which flutter occurs to ensure that it remains outside of the flight envelope. This could be done with flight tests but computations are preferred over them as they are less expensive and less dangerous. This requires being able to evaluate the aerodynamic loads acting on an aircraft. It is a complex task in the transonic regime because of the occurrence of shock waves and boundary layer separation. An error in the load computation would mislead the flutter calculations. It could lead to either an over-restricted flight envelope which would affect the aircraft’s performance or the possible occurrence of flutter during flight which would be dramatic. The load computation is thus crucial and this is why manufacturers are working on developing more efficient and trustworthy methods and software.
This paper will present some theoretical background about the flutter and the computation of aerodynamic loads showing different methods to do it. Then the wind tunnel experiment providing the reference data in this project will be presented. Finally the results obtained with the different computation methods will be compared to these experimental data and discussed.
I- Theoretical background
Mathematical models and computational methods have been used during this project. This section will focus on presenting them.
1. Flutter
Flutter is a dynamic aeroelastic phenomenon. It is due to the interaction between the elastic structure and the surrounding fluid. As external loads are acting on the aircraft, the structural modes change. Their parameters such as the frequency and the damping are affected by these loads. It leads to the coupling of several modes as their frequencies vary closer together. For a specific value of the dynamic pressure, called flutter dynamic pressure, one of these new modes becomes undamped and the system is unstable.

Master Thesis - KTH - 2018 2 Mathilde Perrocheau
For an aircraft to be certified, it is necessary to prove that the flutter will not occur within the flight envelop, with margins. Manufacturers then need to evaluate the flight conditions at which it could happen and to make sure that they are out of the flight domain.
To model the behaviour of the aircraft, one needs to build a finite element model. It will then be possible to compute the structure deformations and to tie them to the external loads. Using this model, the equation of motion is given by [1]:
𝑴�̈�(𝑡) + 𝑲𝒗(𝑡) = 𝒇𝒆𝒙𝒕(�̈�, �̇�, 𝒗, 𝑡 … ) (1)
In Equation (1), 𝒗(𝑡) is the vector of degrees of freedom. The term 𝑴�̈�(𝑡) represents the inertial forces. It is linked to the acceleration �̈�(𝑡) by the mass matrix 𝑴. The term 𝑲𝒗(𝑡) represents the elastic forces, linked to the deformation 𝒗(𝑡) by the stiffness matrix 𝑲. Finally the vector 𝒇𝒆𝒙𝒕(�̈�, �̇�, 𝒗, 𝑡, … ) is the external load applied on the structure. It includes contributions from various forces such as maneuver loads or gust loads. In this project, the aerodynamic loads will be the only one taken into account, thus 𝒇𝒆𝒙𝒕(�̈�, �̇�, 𝒗, 𝑡 … ) = 𝒇𝒂𝒆𝒓𝒐(�̈�, �̇�, 𝒗, 𝑡 … ).
To solve Equation (1), it is convenient to express the dependency of aerodynamic loads on deformations. Using Taylor expansion and introducing the matrix 𝑸 of unsteady aerodynamic forces, one obtains:
𝒇𝒂𝒆𝒓𝒐(�̈�, �̇�, 𝒗, 𝑡 … ) =𝝏𝒇𝒂𝒆𝒓𝒐
𝝏𝒗𝒗(𝑡) + 𝒇𝒐𝒕𝒉𝒆𝒓 = 𝑞𝑸𝒗(𝑡) +𝒇𝒐𝒕𝒉𝒆𝒓 (2)
Where 𝑞 is the dynamic pressure and 𝒇𝒐𝒕𝒉𝒆𝒓 corresponds to the aerodynamic loads that are caused by other phenomena such as gusts. As the report focuses on the flutter, only the aerodynamic loads linked to the deformations are taken into account. Then the equation of motion can be rewritten in the form:
𝑴�̈�(𝑡) + 𝑲𝒗(𝑡) = 𝑞𝑸𝒗(𝑡) (3)
One could work in the time domain to solve this problem but it is more convenient to do it in the frequency domain. The Laplace transform is then applied. The Laplace variable 𝑝 = 𝑖𝜔(1 + 𝑖𝜉) is related to the pulsation 𝜔 and the true-damping coefficient 𝜉, which is defined as a rate of decay [2]. One should notice that the aerodynamic matrix 𝑸 depends on the Mach number and the reduced Laplace variable �̂� = 𝑝𝑐 𝑉𝑟𝑒𝑓⁄ , where 𝑐 is a length unit and 𝑉𝑟𝑒𝑓 is the freestream speed. In this
report, 𝑐 will be equal to 1. This non-dimensional variable can be written as �̂� = 𝑖𝑘(1 + 𝑖𝜉) where 𝑘 = 𝜔𝑐 𝑉𝑟𝑒𝑓⁄ is called the reduced frequency. Moreover the Mach number is considered constant.
The equation of motion in the frequency domain is then given by:
[𝑴𝑝2 + 𝑲 − 𝑞𝑸(�̂�)]�̂� = 𝟎 (4)
The problem can be simplified a little more to predict the flutter dynamic pressure 𝑞𝐹. Indeed the flutter is a dynamic instability. When 𝑞 = 𝑞𝐹, the system is unstable and undergoes undamped oscillations. As such, the aerodynamic matrix depends only on the reduced frequency at the flutter boundary. One should now assume that the aerodynamic matrix is known for any value of 𝑘. Then solving Equation (5) will give the same 𝑞𝐹 as Equation (4).
[𝑴𝑝2 + 𝑲 − 𝑞𝑸(𝑘)]�̂� = 𝟎 (5)
Moreover, as the reduced frequency 𝑘 is related to 𝑝 through 𝑘 = 𝑅𝑒(𝑝)𝑐 𝑉𝑟𝑒𝑓⁄ , the problem can be
identified to a nonlinear Eigenproblem:
[(𝑽𝒓𝒆𝒇
𝒄) 𝑴�̂�2 + 𝑲 − 𝑞𝑸(𝑘)] �̂� = 𝟎
(6)
a. The p-k method
To find the flutter dynamic pressure, one should solve Equation (6) while successively increasing 𝑞. When one mode happens to be undamped, then 𝑞 = 𝑞𝐹. However, for a given 𝑞, the nonlinear Eigenproblem cannot be solved directly. One needs to use an iterative method to find the N eigenvalues {�̂�𝑖}𝑁 and eigenvectors {�̂�𝑖}𝑁, where N is the number of degrees of freedom. The method used in this project is a version of the p-k method [1].

Master Thesis - KTH - 2018 3 Mathilde Perrocheau
For a given dynamic pressure 𝑞, this method uses the reduced frequency as a parameter. Equation (6) is solved for a given value of k. One obtains N eigenvalues {�̂�𝑖}𝑁 and eigenvectors {�̂�𝑖}𝑁. Then the eigenvalues that verifies Equation (7) are eigenvalues of the nonlinear Eigenproblem.
𝐼𝑚(�̂�𝑖) = 𝑘 (7)
The N reduced frequency {𝑘𝑖}𝑁 that corresponds to the N eigenvalues {�̂�𝑖}𝑁 of the nonlinear Eigenproblem are considered classified in the ascending order. One should start by taking a reduced
frequency 𝑘 sufficiently low to be a lower bound of 𝑘1. Then Equation (6) is solved for �̃� = 𝑘 + Δ𝑘
and the eigenvalues {�̂�𝑖(�̃�)}𝑁
are sorted in the ascending order of frequency. Then if:
-𝐼𝑚(�̂�𝑖) < �̃�, the value �̃� is an upper bound of 𝑘1 and a lower bound of 𝑘2,
-𝐼𝑚(�̂�𝑖) > �̃�, the value �̃� is still a lower bound of 𝑘1,
-for several j, 𝐼𝑚(�̂�𝑗) < �̃�, the step Δ𝑘 was too high and the computation is repeated with a
smaller step. The procedure is used to find upper and lower bound for every reduced frequency of the nonlinear Eigenproblem. They the accurate {𝑘𝑖}𝑁 are determine with a bisection or a Newton’s method.
b. Modal analysis
A flutter analysis on an entire aircraft can be very expensive to perform as a nonlinear eigenvalue problem has to be solved with numerous degrees of freedom. A way to reduce this cost is to introduce a new set of coordinates called the modal coordinates.
To define them, one should start by solving the eigenvalue problem [−𝑴𝜔2 + 𝑲]�̂� = 𝟎. The modeshapes {�̂�𝑖} of the structure are identified along with their associated eigenvalues {𝜔𝑖}. The deformations under study in this project affect the entire structure and not just a part of it. Thus one can reasonably assumed them to be determined by the low-frequency modes. Thus the deformation can be written as a linear composition of the m low-frequency modeshapes:c
�̂� = 𝑏1�̂�1 + 𝑏2�̂�2 + ⋯ + 𝑏𝑚�̂�𝑚 = 𝑿𝒃 (8)
Where the vector 𝒃 represents the modal coordinates. Thus one can choose the size of the problem. However a too small modal basis will not be able to give a good approximation of the real deformation of the structure. Then the nonlinear eigenvalue problem can be written in the form:
[−�̅�𝜆2 + �̅� − 𝑞�̅�(𝑘)]𝒃 = 𝟎 (9)
Where �̅� = 𝑿𝑻𝑴𝑿, �̅� = 𝑿𝑻𝑲𝑿 and �̅� = 𝑿𝑻𝑸𝑿.
2. Aerodynamic forces
The ability to predict the flutter is closely linked to the capacity to compute the aerodynamic loads in unsteady state. Indeed their interactions with the elastic structure will be the cause of the instability. Thus it is crucial for manufacturers to have efficient tools to compute them on an aircraft. Aerodynamic loads are derived from the pressure field around the structure. They are determined as it is oscillating at a given reduced frequency 𝑘. In the subsonic regime, this computation is performed reasonably well. However it is more complex in the transonic domain. When the Mach number is close to unity, shock waves and boundary layer separations occur. In this section different methods to compute the aerodynamic loads at a given reduced frequency will be presented.
a. Doublet-Lattice method (DLM)
This frequency-domain method allows the computation of aerodynamic loads acting on a body in a stream. Based on several assumptions, it is possible to compute the pressure coefficients at the surface of the body and then the loads for a given Mach number and a given reduced frequency. Because of the DLM assumptions, it is simple to implement and it consumes lesser time. However it is usually used in the early design stages as it becomes inadequate for more delicate analysis, such as

Master Thesis - KTH - 2018 4 Mathilde Perrocheau
in the transonic domain. It will be used in this project just for comparison purpose. Thus only the main assumptions are presented here.
In this method, the fluid is considered inviscid, irrotational, compressible and unsteady. The speed of sound is assumed to be a constant. Far field conditions are also imposed: the flow is supposed to be steady with straight streamlines. It implies that the pressure is a constant as well as the velocity. The condition of flow tangency at the surface is also imposed. Finally the lifting surfaces are approximated as flat plates with infinitesimal thickness and only their harmonic motions are considered.
The assumption of irrotational fluid implies the existence of a velocity potential 𝛷, defined by 𝑽 =𝛻𝛷. Then one can derive the pressure potential equation [3]. Solving this equation in the frequency domain, one can obtain the pressure coefficients at the surface of the body and thus the aerodynamic loads acting on it.
The Doublet-Lattice method allows the evaluation of aerodynamic loads needed in a flutter analysis. However as it is based on a linearized inviscid problem, it will not be accurate in the transonic domain. Thus it is mostly used in subsonic regime and in the early design stages.
b. Navier-Stokes
Another method to compute the aerodynamic loads is to solve the Navier-Stokes equations. It is a more complete way to do it as weaker assumptions are made. The fluid is still assumed to be compressible. Then the Navier-Stokes equations are written in the form:
𝜕𝜌
𝜕𝑡+
𝜕𝜌𝑢𝑗
𝜕𝑥𝑗= 0
𝜕𝜌𝑢𝑖
𝜕𝑡+
𝜕
𝜕𝑥𝑗(𝜌𝑢𝑖𝑢𝑗 + 𝑝𝛿𝑖𝑗 − 𝜏𝑖𝑗) = 0
𝜕𝜌𝑒0
𝜕𝑡+
𝜕
𝜕𝑥𝑗(𝜌𝑢𝑗𝑒0 + 𝑝𝑢𝑗 + 𝑞𝑗 − 𝑢𝑖𝜏𝑖𝑗) = 0
(10)
These equations link the density 𝜌, the three components of velocity (𝑢𝑖) and the total energy 𝑒0
with the pressure 𝑝, the three components of the heat-flux (𝑞𝑖) and the viscous stress tensor (𝜏𝑖𝑗).
Considering the air as a Newtonian fluid, one can write:
𝜏𝑖𝑗 = 2𝜇 [1
2(
𝜕𝑢𝑖
𝜕𝑥𝑗+
𝜕𝑢𝑗
𝜕𝑥𝑖) −
1
3
𝜕𝑢𝑘
𝜕𝑥𝑘𝛿𝑖𝑗] (11)
Instead of solving the instantaneous equations, an averaged form is derived. One needs to introduce two different types of averaging. The first one is called Reynolds averaging and is defined by �̅� =1
𝑇∫ 𝜑(𝑡)𝑑𝑡. The second one is a density weighted time averaging called Favre averaging. It is defined
by �̃� =𝜌𝜑̅̅ ̅̅
�̅�. Then one can write:
𝜌 = 𝜌′ + �̅� ; 𝑝 = 𝑝′ + �̅� ; 𝑢𝑖 = 𝑢𝑖" + �̃�𝑖 (12)
Applying a time averaging to the Navier-Stokes equations and using the three formulas above, one obtains:
𝜕�̅�
𝜕𝑡+
𝜕�̅��̃�𝑗
𝜕𝑥𝑗= 0
𝜕�̅��̃�𝑖
𝜕𝑡+
𝜕
𝜕𝑥𝑗(�̅��̃�𝑖�̃�𝑗 + �̅�𝛿𝑖𝑗 + 𝜌𝑢𝑖"𝑢𝑗"̅̅ ̅̅ ̅̅ ̅̅ ̅̅ − �̅�𝑖𝑗) = 0
𝜕�̅��̃�0
𝜕𝑡+
𝜕
𝜕𝑥𝑗(�̅��̃�𝑗�̃�0 + 𝜌𝑢𝑗"𝑒0"̅̅ ̅̅ ̅̅ ̅̅ ̅̅ + �̅��̃�𝑗 + 𝑝𝑢𝑗"̅̅ ̅̅ ̅̅ + 𝑞𝑗 − 𝑢𝑖𝜏𝑖𝑗̅̅ ̅̅ ̅̅ ) = 0
(13)

Master Thesis - KTH - 2018 5 Mathilde Perrocheau
The velocity fluctuations are still present in the equations through the so called Reynolds stress tensor 𝑅𝑖𝑗 = 𝜌𝑢𝑖"𝑢𝑗"̅̅ ̅̅ ̅̅ ̅̅ ̅̅ . Then in order to solve the system, one needs to formulate 𝑅𝑖𝑗 as a function of
the averaged velocity �̃�𝑖. Using the Boussinesq approximation, one can write:
𝑅𝑖𝑗 = 𝜌𝑢𝑖"𝑢𝑗"̅̅ ̅̅ ̅̅ ̅̅ ̅̅ = −2𝜇𝑡 [1
2(
𝜕�̃�𝑖
𝜕𝑥𝑗+
𝜕�̃�𝑗
𝜕𝑥𝑖) −
1
3
𝜕�̃�𝑘
𝜕𝑥𝑘𝛿𝑖𝑗] +
2
3�̅�𝑘𝛿𝑖𝑗 (14)
The turbulent kinetic energy 𝑘 is defined by 𝑘 =𝑢𝑘"𝑢𝑘"̃
2 and 𝜇𝑡 is the turbulent dynamic viscosity.
Then one needs to use a turbulence model to determine 𝜇𝑡 . Numerous models exist with their pros and cons. In this project, the Spalart-Allmaras model is used.
It is the most commonly used one-equation model. It is based on the Boussinesq approximation but
it ignores the last term 2
3�̅�𝑘𝛿𝑖𝑗 of Equation (14). Indeed 𝑘 is not available in this model. Then one only
needs to compute the turbulent dynamic viscosity 𝜇𝑡 to obtain the Reynolds stress tensor 𝑅𝑖𝑗 .
It is assumed that 𝜇𝑡 can be expressed as 𝜇𝑡 = 𝜌𝜈𝑡𝑓𝑣1 where 𝑓𝑣1is not a constant but a function of 𝜈𝑡 . Then the model is given by the following equation [4]:
𝜕�̅�𝜈𝑡
𝜕𝑡+
𝜕�̅��̃�𝑗𝜈𝑡
𝜕𝑥𝑗
= 𝑐𝑏1�̅��̃�𝜈𝑡 − [𝑐𝑤1𝑓𝑤 −𝑐𝑏1
𝜅] �̅� (
𝜈
𝑑)
2
+1
𝜎[
𝜕
𝜕𝑥𝑗
((�̅�𝜈 + �̅�𝜈𝑡)𝜕𝜈𝑡
𝜕𝑥𝑗
) + �̅�𝑐𝑏2 (𝜕𝜈𝑡
𝜕𝑥𝑖
)2
] (15)
In Equation (15), 𝑐𝑏1, 𝑐𝑏2, 𝑐𝑤1, 𝜎 and 𝜅 are constants, 𝑓𝑤 is a function of 𝜈𝑡 , 𝑑 represents the distance
from the wall and 𝑆 is the scalar norm of the vorticity tensor.
In order to perform flutter computations, the unsteady aerodynamic loads are needed. To this end, the Navier-Stokes equations have been solved in the time domain using this turbulence model. A frequency-domain method has also been used to solve a linearized version of Equation (10).
3. Wind-tunnel experiment
A wind tunnel experiment performed in 2004 with ONERA has been taken as reference to evaluate the results from the different computations. The goal of this test was to gather data on:
- the pressure field at the surface of the model, especially in transonic regime, - the occurrence of the flutter for a range of Mach numbers 𝑀 and angles of attack 𝛼.
The test took place in an ONERA transonic wind tunnel. The model used was composed of a swept wing with no mobile part and a generic fuselage. The symmetric 2D-profile NACA 64A010 was used to design the wing. The model was fitted with numerous pressure sensors and accelerometers. It was then fixed on a wall of the wind tunnel.
To gather data on the pressure field around the wing, the model was set up at a given 𝛼 and the wind tunnel was turned on for a range of Mach numbers. This operation was done several times for different angles of attack to analyze the impact of an increase of 𝛼.
The flutter phenomenon was also studied during this experiment. The model used had two structural modes: bending and torsion. Thus the instability would only be caused by the coupling of these two modes. For each set (𝑀,𝛼) the occurrence of flutter was looked at. Instead of the dynamic pressure 𝑞, the parameter used during the tests was the stagnation pressure 𝑃𝑖, measured in the settling chamber, as it is tied to 𝑞 - when 𝑀 is lower than 1 - by the relation:
𝑃𝑖 =2𝑞
𝛾𝑀2(1 +
𝛾 − 1
2𝑀2)
𝛾𝛾−1 (16)
Where 𝛾 is the ratio of specific heats. Thus the model was set to a given angle of attack and the wind tunnel was turned on at a given Mach number. Then the stagnation pressure was slowly increased until the system became unstable. A security system quickly kicked in to stop the phenomenon before any damage was done.

Master Thesis - KTH - 2018 6 Mathilde Perrocheau
The Mach numbers and the angles of attack used during the flutter test are gathered in Table 1.
Mach α
0.70 0.75 0.80 0.81 0.82 0.83 0.84 0.85 0.86 0.87 0.88 0.89
0.0° X X X X X X X X X
1.0° X X X X X X X X X
1.6° X X X X X X X X
2.1° X X X X X
Table 1 – Experimental Mach numbers and angles of attack
II- Flutter computations results
Numerous computations have been done to predict the flutter stagnation pressure 𝑃𝑖𝑐𝑟𝑖𝑡 for
different Mach numbers and angles of attack. This section will present them and their results.
1. Computations
The flutter prediction is driven in part by the computation of the aerodynamic loads. The flutter results obtained with several methods to compute these loads have been compared to experimental data. Thus the choice for the range of Mach numbers and angles of attack was mostly determined by the experiment. Some Mach numbers were taken into account in the calculations even though they had not been tested to have more complete results.
The DLM method was only used for the case of a zero angle of attack. It is a fast way of computing the aerodynamic loads but one should expect that it will have difficulties in the transonic regime.
The time-domain method of solving nonlinear Navier-Stokes equations is very expensive in time so the computations have been reduced to a minimum. It has been used for a limited range of Mach numbers and for the case of a zero angle of attack. The frequency-domain method of solving the linearized Navier-Stokes equations consumes a lot less time so it has been used for all the angles of attack under study.
2. Zero angle of attack
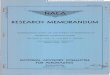
In the case of a zero angle of attack, the results are presented on Figure 1. One can observe that as expected the DLM method is the less accurate, even in the subsonic domain. It has great difficulties in the transonic regime as flutter stagnation pressure keeps decreasing while the experimental data show an increase after Mach 0.86. The results obtained by solving the Navier-Stokes equations with the Spalart-Allmaras turbulence model are very close between the time- and the frequency-domain methods. They are also closer to the experimental data than the DLM. One can see that the increase of 𝑃𝑖𝑐𝑟𝑖𝑡 is reproduced by the
numerical solution. However the computations predict this increase for a higher Mach number. It also appears that the minimum 𝑃𝑖𝑐𝑟𝑖𝑡 is lower than the one from the experimental data.
At zero angle of attack, the DLM method is unable to predict the 𝑃𝑖𝑐𝑟𝑖𝑡. Solving the Navier-Stokes
gives accurate results until Mach 0.85. However none of the methods is able to predict the right flutter stagnation pressure for Mach 0.86 to Mach 0.88. At Mach 0.89, the value obtained with the Spalart-Allmaras model is close to the experimental point again.

Master Thesis - KTH - 2018 7 Mathilde Perrocheau
Figure 1 – Evolution of the flutter stagnation pressure with Mach number at α=0°
3. Non-zero angle of attack
The non-zero angle of attack cases were only analyzed using the frequency-domain method of solving the linearized Navier-Stokes equations with the Spalart-Allmaras turbulence model. The results are presented on Figure 2.
One can observe that in the subsonic domain, the results are very close to the experimental data. As with a zero angle of attack, difficulties occur in the transonic domain. The increase of the critical stagnation pressure after a specific Mach number occurs at every angle of attack and is reproduced by the numerical solutions. However this increase still occurs at a higher Mach number than in the experiment and the minimum 𝑃𝑖𝑐𝑟𝑖𝑡 predicted by the calculations is lower than the real one.
On Figure 2, one can see that the increase of 𝑃𝑖𝑐𝑟𝑖𝑡 happens at a lower Mach number as the angle of
attack is increasing. One can also observe that the minimum critical stagnation pressure is increasing with 𝛼. Another observation is that at zero angle of attack the computed curve looks sharp when it reaches its minimum. When the angle of attack increases, it seems that the curve becomes smoother.
Figure 2 – Evolution of the flutter stagnation pressure with Mach number at α non zero
40000
60000
80000
100000
120000
140000
160000
180000
0.7 0.72 0.74 0.76 0.78 0.8 0.82 0.84 0.86 0.88 0.9
Pi (
Pa)
Mach
60000
80000
100000
120000
140000
160000
180000
0.7 0.72 0.74 0.76 0.78 0.8 0.82 0.84 0.86 0.88 0.9
Pi (
Pa)
Mach number
SA linearized 1° SA linearized 1.6° SA linearized 2.1°
Experiment 1° Experiment 1.6° Experiment 2.1°
Experiment SA temporal SA linearized DLM

Master Thesis - KTH - 2018 8 Mathilde Perrocheau
III- Analysis of the results
The results show some interesting features as the Mach number - or the angle of attack - increases. This section will focus on them and try to offer some explanations. As seen previously, the DLM does not give accurate results, so only those obtained by solving the Navier-Stokes equations will be considered here.
1. Flow regime
As the Mach number increases, the flow regime changes. It goes from subsonic to transonic in the range under study in this project. This change is followed by the occurrence of shock waves and boundary layer separations. These phenomena can impact flutter. To illustrate this, the case of a zero angle of attack solved with the Spalart-Allmaras model will be the only one taken into account here.
One can see on Figure (1) that the critical stagnation pressure starts by decreasing with 𝑀 but after a particular Mach number it increases. This observation can be done for both computed and experimental data but the critical value of 𝑀 is not the same. In order to understand this change, one should focus on the occurrence of transonic phenomena in steady state. Then one can use the pressure coefficient 𝐶𝑝 and the shape factor 𝐻𝑖 . These two quantities are defined by:
𝐶𝑝 =2𝑝
𝜌𝑉2𝑆𝑟𝑒𝑓 ; 𝐻𝑖 =
𝑖
1𝑖 (17)
Where 𝑝 is the pressure, 𝜌 is the density, 𝑉 is the freestream velocity and 𝑆𝑟𝑒𝑓 is a reference area. 1𝑖 represents the incompressible displacement thickness and 𝜃𝑖 corresponds to the incompressible momentum thickness. The pressure coefficients can be used to detect a shock wave. The focus is put on the one located on the upper side of the wing. It will translate into a rapid increase of 𝐶𝑝 at its
position. The shape factor is used as an indicator of the boundary layer separation, which occurs when 𝐻𝑖 is close to 2.4.
Using the computed values of these two quantities, one can notice that a shock wave appears at Mach 0.83. The boundary layer separation slowly starts to develop at Mach 0.87 but is clearly visible when 𝑀 equals to 0.88. It spreads towards the trailing edge as the Mach number increases and it reaches it for 𝑀=0.89. One can see on Figure (1) that the occurrence of a shock wave does not disturb the behaviour of 𝑃𝑖𝑐𝑟𝑖𝑡. It keeps decreasing with the same slope. As the boundary layer
separation develops at the foot of the shock, it is still decreasing. However when it reaches the trailing edge for M=0.89, the slope changes and the computed 𝑃𝑖𝑐𝑟𝑖𝑡 increases. Looking at the
experimental data, one can notice that the increase of the flutter stagnation pressure starts at a lower Mach number - 𝑀=0.87.
The difference between the experiment and the numerical results is in part caused by the turbulence model used. Indeed the Spalart-Allmaras has a tendency to predict shock waves a bit closer to the trailing edge than in reality. This conclusion was drawn from the computations of the pressure coefficient. It also usually predicts the boundary layer separation development at a higher Mach than it should. Thus one can think that it will reach the trailing edge at lower Mach numbers than the ones computed. This partially explains why the increase of the critical stagnation pressure happens at 𝑀=0.87 in reality and not at 𝑀=0.89 as in the computed values.
Another reason for this difference is the difficulty to model the interaction between the shock wave and the boundary layer. Indeed they have different behaviours. As the angle of attack increases, the shock wave tends to move towards the trailing edge while the boundary layer separation tries to go forward to the leading edge. Thus there is a competition between these two phenomena. When one of them is really weaker than the other one, then this competition is non-existent and the numerical model manages to give accurate results. This happens when the boundary layer separation is at its very beginning or when it is fully developed and reaches the trailing edge. In the first case the shock prevails and in the second one it is dominated. However in transitional region, in which the boundary layer separation is growing at the foot of the shock, the numerical tools struggle to reproduce the behaviour of the fluid.

Master Thesis - KTH - 2018 9 Mathilde Perrocheau
The Spalart-Allmaras model seems to be of good use in the subsonic regime and in some part of the transonic domain. In the latter case, it has difficulty when the boundary layer separation is developing and competing with the shock wave.
2. Impact of the angle of attack
A point of interest in this project was the study of the impact of the angle of attack on the flutter. Thus the computations were run for four different values of 𝛼 with the Spalart-Allmaras turbulence model. The results presented previously have shown some remarkable aspects which this section will focus on. The first observation is that the minimum critical stagnation pressure gets higher and is reached at a lower Mach number as the angle of attack increases. To understand this phenomenon, one should focus on the impact of the angle of attack on the behaviour of the flow around the structure in steady state.
As 𝛼 increases, the transonic regime starts at a lower Mach number of the freestream. This leads to the occurrence of shock waves and boundary layer separation for lower values of 𝑀. As an example, one can see on Figure (3) that for 𝑀 = 0.8 the high shape factor area is restricted at the shock‘s foot when 𝛼 = 0° but it reaches the trailing edge when 𝛼 = 1°. As explained previously, these two phenomena have an impact on flutter, especially the second one. Indeed it has been pointed out that the development of the boundary layer separation behind the shock wave results in a change of the evolution of 𝑃𝑖𝑐𝑟𝑖𝑡 with the Mach number. It starts increasing with 𝑀 instead of decreasing.
Therefore if the boundary layer separation occurs at a lower Mach number then so does the increase of the critical stagnation pressure.
Figure 3 – Shape factor distribution on the upper side of the wing at Mach 0.88 The second highlight aspect is that on Figure (2) the curves seem to become smoother when 𝑃𝑖𝑐𝑟𝑖𝑡
reaches its minimum value as the angle of attack is increasing. This can also be observed on Figure 4 that shows the evolution of the frequency and the true damping of the two modes with 𝑃𝑖 for 𝛼 equals to 0° and 1.6° and for several values of the Mach number. One can see that the true damping coefficient curves of the bending mode are pretty far away from each other at zero angle of attack while some of them are very close when 𝛼 = 1.6°.
An explanation to this phenomenon could be that as 𝛼 increases, the development of the boundary layer separation at the shock wave’s foot becomes more gradual with respect to Mach number. Thus when 𝑀 increases, the fluid’s behaviour after the shock changes but not as much as it would at a lower angle of attack. Then the evolution of 𝑃𝑖𝑐𝑟𝑖𝑡 - which is closely linked to the boundary layer one
- becomes also more gradual. This leads to a more flattened curve.
Another reason for this sharpness of the 𝑃𝑖𝑐𝑟𝑖𝑡 curve at zero angle of attack could be that at Mach
0.88 and 0.89, the bending mode becomes unstable by itself when 𝑃𝑖 increases. It does not need coupling with the torsion mode. The true damping coefficient becomes negative at some point. In cases of non-zero angle of attack, the bending mode is stable for any value of the stagnation pressure. Thus it seems that increasing 𝛼 stabilizes it.
a. 𝛼 = 0° b. 𝛼 = 1°

Master Thesis - KTH - 2018 10 Mathilde Perrocheau
Figure 4 – Evolution of the modes frequency and damping with Pi
IV- Conclusion The flutter prediction is of prior interest to ensure the safety of an aircraft and its passengers. Two methods were used in this project to compute the unsteady aerodynamic loads needed to this aeroelastic analysis. The Doublet-Lattice method is usually used because it is simple to implement and because of its computing time. It quickly provides results but their accuracy is limited. Because of the approximation used in it, it will give a good approximation in the subsonic regime but it cannot model correctly the fluid in the transonic domain. Solving the Navier-Stokes equations with the Spalart-Allmaras turbulence model gives more accurate results. This method predicts the flutter to happen at pressures that are close to the measured ones. For a given angle of attack, the impact of the increase of the Mach number on the flutter pressures was studied. It appears that the 𝑃𝑖𝑐𝑟𝑖𝑡 decreases as 𝑀 increases until it reaches a particular value,
after which the pressure increases. This interesting feature is linked to the development of a boundary layer separation. As it grows behind the shock, it prevents it to move towards the trailing edge. This change in the shock’s motion seems to be the cause of the critical pressure increase. The angle of attack can also impact the evolution of the flutter pressure. At higher 𝛼, transonic phenomena occur at lower Mach numbers. Thus the boundary layer separation is strong enough to push the shock back towards the leading edge for lower values of 𝑀 as the angle of attack increase. This causes the change in the evolution of 𝑃𝑖𝑐𝑟𝑖𝑡 to happen at lower Mach numbers. Another
noticeable fact was highlighted during this study. Indeed the numerical tools seem to be more accurate as the angle of attack increases. When 𝛼 equals to zero, the curve presents a sharp edge that becomes smoother as it gets higher. The method that solves the Navier-Stokes equations with Spalart-Allmaras turbulence model gives a good approximation of the flutter pressure in the subsonic and the low transonic domains. For higher Mach, it has some difficulties but it manages to reproduce the increase of 𝑃𝑖𝑐𝑟𝑖𝑡. It is also able to
recreate the impact of the increase of the angle of attack. Thus this tool can be trusted to predict the flutter stagnation pressure but one should keep in mind its weakness.
Pi (Pa) Pi (Pa)
Damping (‰) Damping (‰)
Bending mode
Bending mode
Torsion mode Torsion mode
Frequency (Hz) Frequency (Hz)
Mach 0.85 Mach 0.86 Mach 0.87 Mach 0.88 Mach 0.89
a. 𝛼 = 0° b. 𝛼 = 1°

Master Thesis - KTH - 2018 11 Mathilde Perrocheau
References
[1] Dan Borglund, David Eller, Aeroelasticity of the slender wing structures in low-speed airflow, KTH Aeronautical and Vehicle Engineering, ISSN 1651-7660,2016
[2] Hermann J. Hassig, An approximate true damping solution of the flutter equation by determinant iteration, Journal of Aircraft, Vol 8, NO.11,1971
[3] Max Blair, A compilation of the mathematics leading to the doublet lattice method, 1992, Wright Laboratory, Ohio
[4] The Spalart-Allmaras Turbulence Model, NASA, 2017, https://turbmodels.larc.nasa.gov/spalart.html