Embed Size (px)
Citation preview

Fortschritte bei der Automatisierung des Reverse Engineering
G. Häusler, S. Karbacher, D. Ritter Universität Erlangen-Nürnberg, Lehrstuhl für Optik
Staudtstr.7/B2, 91058 Erlangen Tel.: 091311858382, Fax.: 09131/13508 email: haeusler@physik. uni -erlangen.de
Zusammenfassung
Beim 2. ABW-Workshop haben wir ein Verfahren vorgestellt, mit dem es möglich ist, die Form eines dreidimensionalen Objektes optisch abzutasten und nahezu vollautomatisch eine vollständige CAD
Beschreibung der Objektoberfläche zu erzeugen. Der Sensor kann dabei frei, d. h. ohne Verwendung einer Positioniereinheit, um das Objekt herumgeführt werden. In diesem Vortrag werden wir über Verbesserungen des Verfahrens wie die Einführung einer globalen Minimierung der Justierfehler der Einzelflächen berichten. Außerdem werden neue Experimente vorgestellt, welche die Leistungsfähigkeit und Genauigkeit des Verfahrens dokumentieren. Da das Proceeding zum 2. ABW-Workshop nur einen groben Überblick vermittelte, werden in diesem Artikel auch die Grundlagen beschrieben.
1 Einführung
Seit einigen Jahren werden optische 3D-Sensoren (z. B. Laserscanner) als Werkzeuge für das 'Reverse Engineering' eingesetzt. Hierzu wird die Form realer dreidimensionaler Objekte digitalisiert und in eine CAD-Beschreibung umgewandelt. Die Daten lassen sich dann wie synthetische CAD-Modelle manipulieren. Dies ermöglicht z. B. die Übernahme älterer Modellformen in den computerunterstützten Designprozeß. Mit Hilfe von CAM-Technologien wie NC-Fräsen oder Stereolithografie können dreidimensionale Kopien der ursprünglichen Objekte erzeugt werden. Besondere Bedeutung haben solche Verfahren für die Zahnmedizin, da sich auf diese Weise· aus der optischen Abtastung von Zähnen oder Zahnabdrücken automatisch passende Inlays oder Kronen fräsen lassen. Die Fa. Siemens bietet beispielsweise seit einigen Jahren mit dem CEREC-System [MB89] ein Verfahren zur automatischen Erstellung von Inlays an.
Die Rohdaten der 3D-Sensoren, die sogenannten 'Tiefenbilder', sind nicht für die direkte Übernahme in ein CAD/CAM-System geeignet. Diese liegen nämlich in ihren eigenen, sensorbezogenen Koordinatensystemern vor. Es handelt sich außerdem nicht um Flächenbeschreibungen, sondern um Wolken von Punktkoordinaten im Raum. Die Anzahl der Meßpunkte kann dabei mehrere Millionen betragen. Die Daten sind zudem in der Regel von Meßfehlern wie Ausreißern, 1 Sensorrauschen, Aliasing-Effekten2 etc. gestört. Um daraus sinnvolle Flächenbeschreibungen zu erzeugen, sind vor allem drei Probleme zu lösen: die Rücktransformation der Einzelaufnahmen in ein gemeinsames Koordinatensystem ( 'Matehing' bzw. 'Registrierung'),3 die Rückgewinnung der Objekttopologie aus den Punktwolkendaten ('Fiächenrekonstruktion') und die Manipulation der Flächengeometrie zur Eliminierung von Meßfehlern und zur Reduktion der Datenmenge ('Flächenmodellierung'). In der Praxis durchdringen sich die beiden letzten Aufgabengebiete meist. So wird bei der derzeit gebräuchlichen 'Flächenrückführung' die Flächenrekonstruktion und Modellierung in einem Schritt durchgeführt, indem 'Tensorproduktflächen'4 direkt an die Punktwolke gefittet werden. Derartige Verfahren verlangenjedoch viel interaktive Kontrolle durch den Benutzer (z. B. [KL96]).
1 Wenn Störungen ein stärkeres Signalliefern als die Scanlinien, werden zufällig im Raum verteilte Meßpunkte erzeugt. 2 Durch Unterabtastung entstehen Moire-Strukturen in der gemessenen Fläche. 3 Dieses Problem ist nicht trivial lösbar, wenn mehrere Einzelaufnahmen aus unbekannten Sensorpositionen durchgeführt wurden. 4 Flächen, die als kartesisches Produkt von Kurven definiert sind (meist Bezier- oder Spline-Kurven).
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 1 von 10
Für einige Anwendungen wie die oben erwähnten "3D-Kopierer" und 'Virtual Reality' ist solch ein Aufwand jedoch überflüssig. Hier genügt die Erzeugung von Netzen ebener oder gekrümmter Dreiecke (z. B. [HDD+92, Vel92, EM94, TL94, HH96, NS96, CL96]). In der Tat sind Tensorproduktflächen nur für "echtes" Reverse Engineering notwendig, d. h. dort, wo kein Unterschied in der Handhabung digitalisierter und synthetischer Flächen erwünscht ist. Am Lehrstuhl für Optik der Universität Erlangen wird daher seit einigen Jahren eine weitgehend automatisierte Verarbeitungskette von der Datenaufnahme bis zur Erzeugung von Dreiecksnetzen aufgebaut. Diese Reverse-Engineering-Kette umfaßt folgende Verarbeitungsschritte:
Datenaufnahme: Um die Oberfläche eines Objektes vollständig zu erfassen und um Datenverluste durch Abschattungen und Reflexe zu kompensieren, sind meist mehrere Messungen aus verschiedenen Richtungen nötig. Es entstehen dabei sog. 'Tiefenbilder' mit auf der Pixelmatrix des Sensorchips angeordneten Abstandswerten d(i,j). Solchermaßen geordnete Daten werden auch als 'Rasterdaten' bezeichnet. In [Hec88, HH88, HN92, HL93, Lam94] sind die Prinzipien der wichtigsten am Lehrstuhl benutzten Sensoren beschrieben.
Kalibration: Mit Hilfe eines genau bekannten Probekörpers wird eine Transformation zur Umrechnung der Pixelkoordinaten in echte metrische Raumkoordinaten ermittelt (siehe [HS92, BHS93, HS94, HSS95, HSS96, Sto96]). In den "kalibrierten" Tiefenbildern besitzen die Koordinatentripel (x,y,Z)iJ ebenfalls die Ordnung der ursprünglichen Pixelmatrix.
Flächenjustierung: Die verschiedenen Ansichten werden in ein gemeinsames Koordinatensystem transformiert und zueinander ausgerichtet. Da die relativen Sensorpositionen der einzelnen Aufnahmen i. a. nicht bekannt sind, müssen die Transformationsparameter durch Lokalisationsverfahren bestimmt werden. Meist wird diese Aufgabe in zwei Teilschritten gelöst: Zuerst erfolgt eine wenig genaue Grobjustierung, die dafür große Winkelabweichungen und Verschiebungen erlaubt ('Surface Matching', siehe [HR94, HR95, BS96, HKR96, SB96]), dann eine sehr genaue Feinjustierung ('Registrierung', siehe [Hor87, Neu89, BM92, Neu92, BL95, SH96]). Die Ordnung der Pixelmatrix bleibt dabei erhalten.
Flächenrekonstruktion: Die verschiedenen Ansichten werden zu einem vollständigen Flächenmodell verschmolzen. Es entsteht eine Beschreibung der Fläche durch ein Netz ebener Dreiecke. Die vom Sensor gemessenen Koordinaten werden dabei unverändert als Vertices (Eckpunkte der Dreiecke) übernommen. Die ursprüngliche Ordnung der Daten geht verloren, es entstehen sog. 'verstreute Daten' ('Scattered Data').
Flächenmodellierung: Eine neue Modellierungsmethode erlaubt es, gekrümmte Flächen alleine aus den Vertices und den Flächennormalen eines Dreiecksnetzes zu interpolieren. In Verbindung mit einer krümmungsabhängigen Datenausdünnung ermöglicht dies eine kompakte Beschreibung der Flächen durch Netze gekrümmter Dreiecke. Durch Filterung der Flächennormalen lassen sich mit diesem Verfahren Meßfehler wie Sensorrauschen, Aliasing, Kalibrier-und Justierfehler eliminieren, ohne dabei Objektkanten zu zerstören. Zwischenergebnisse dieses Verfahrens wurden in [Kar93, HK94, HK95, HKR96] veröffentlicht.
Flächensegmentierung: Die Netzausdünnung führt eine Klassifikation der Flächen nach Krümmungseigenschaften (eben, konvex, konkav, zylindrisch konvex, zylindrisch konkav, sattelförmig) durch. Die Ergebnisse können benutzt werden, um eine manuelle Segmentierung bei der Flächenrückführung zu erleichtern.
Der Vortrag befaßt sich mit der Justierung der Einzelaufnahmen und der Rekonstruktion und Modeliierung von CAD-Flächen. Die hierzu benötigten Algorithmen wurden in dem MS-Dos-Programm SLIM (Sensing, Localization, Identification & Modelling) zusammengefaßt. Geführt über eine graphische Benutzeroberfläche werden Merkmalsextraktion, Grobjustierung, lokale und globale Feinjustierung sowie Oberflächenmodellierung bereitgestellt. Es werden ein Intel-Pentium-Prozessor, 32MByte Hauptspeicher, 500 MByte Festplatte und SVGA-Graphik vorausgesetzt.
2 Justierung der Einzelmessungen
Das Programm SLIM bietet eine an wenderorientierte Lösung zur Rundumvermessung von beliebigen Objekten. Ziel ist es, ein Objekt vollständig mit unbekannt plazierten, optischen 3D-Sensoren vermessen
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 2 von 10

Abbildung 1: Matehing von 6 Einzelansichten eines Optikbau teils. Die Kreuze markieren automatisch detektierte Objektecken.
und modellieren zu können [HR95, HKR96]. Ein einzelnes Tiefenbild eines 3D-Sensors umfaßt aber immer nur einen Teil der gesamten Objektoberfläche. Außerdem gibt es meist Bereiche ohne auswertbare Höheninformation (z. B. durch Abschattungen bei Triangulationssensoren). Daher muß eine vollständige Rundumvermessung aus mehreren Tiefenbildern zusammengesetzt werden ('3D-Matching'). Wird ein Sensor mit Hilfe einer mechanischen Einrichtung definiert um das Objekt herumgeführt, können aus den bekannten Sensorpositionen im Raum die einzelnen Meßdatensätze in ein gemeinsames Koordinatensystem rücktransformiert werden. Ergebnis ist ein Punktwolkenmodell der gesamten Objektoberfläche. Durch die Positionierungsmechanik (xyz-Scantisch, Roboterarm) wird die Bewegungsfreiheit des Sensors in der Regel auf einen relativ kleinen Bereich eingeschränkt. Das hier verwendete Verfahren erlaubt dagegen eine "freihändige" Positionierung des 3D-Sensors um das unbekannte Objekt, ohne Kenntnis der Sensorlage im Raum.
Dazu wird ein Objekterkennungssystem verwendet, das mit Hilfe von Grauwert- oder Tiefenbildern bekannte starre Körper in einem gegebenen Umfeld erkennen und lokalisieren kann [Rit96]. Die einzelnen gemessenen 3D-Datensätze müssen paarweise in einem gemeinsamen Bereich überlappen. In diesem Überlappbereich werden mit Hilfe von Merkmalsextraktionsalgorithmen in je zwei Datensätzen automatisch intrinsische Objektmerkmale (z. B. Objektecken) gesucht. Alternativ dazu können Merkmalspunkte, im 3D-Bild oder dem zugehörigen pixelidentischen Intensitätsbild, auch interaktiv markiert werden. Die 3D-Merkmalskoordinaten in der ersten 3D-Ansicht werden jetzt als Referenzmerkmale, die der überlappenden zweiten 3D-Ansicht als Inputmerkmale dem 3D-Lokalisationsalgorithmus übergeben und daraus (ohne explizit die Punktzuordnung zu kennen) die relativen Lageparameter (a, ß, y,x,y,z) zwischen beiden Messungen berechnet. Damit kann die zweite Messung in das Koordinatensystem der ersten rücktransformiert und die Objektoberfläche aus beiden Sensoransichten zusammengesetzt werden. Sukzessive wird so aus paarweise überlappenden 3D-Teilaufnahmen die komplette Objektoberfläche zusammengefügt (siehe Abbildung 1).
Ein Problem stellen die nicht beliebig genau zu lokalisierenden Objektmerkmale dar. Sie führen zu Abweichungsfehlern der sich paarweise überlappenden Flächen. Zur exakten Ausrichtung je zwei er Flächen ('lokale Feinjustierung') wird ein Optimieralgorithmus ('Simulated Annealing') angewandt, der den quadratischen Abstand beider Flächen minimiert. Als Abstandsmaß werden die kürzesten Abstände zwischen den Punkten der beiden Fläche verwendet. Abbildung 2 zeigt die Entwicklung des Abstandsfehlers zweier Anfangs noch voneinander abweichenden Flächen während des Optimierprozesses. Das Ergebnis ist eine Korrektur der relativen Lageparameter. Ist die Sensorkalibrierung fehlerfrei (also ohne geometrische Verzerrungen), entspricht die erreichbare Genauigkeit mit der lokalen Feinjustierung dem Sensorrauschen der gemessenen 3D-Teilflächen.
Mit der paarweisen Flächenoptimierung alleine lassen sich keine geschlossenen Oberflächen justieren. Durch die Akkumulation des Restfehlers des Matchings (bedingt durch Sensorrauschen und Kalibrierfeh-
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 3 von 10

I Fehlerentwicklung ESC=Abbruch I Startfehler: 222.220139 [ 100000 Schri ttel Endfehl er: 0.008611 minimalster Fehler: 0.007i32 1 -c ~c k- rro • 0 )( 72-i
-• • ~ "' "' ""
~ 1-
Abbildung 2: Fehlerentwicklung bei der Feinjustierung zweier identischer Flächen, die zueinander im Raum verdreht wurden.
ler) entsteht in der Regel an der Nahtstelle zwischen der ersten und der letzten gematchten Teilfläche ein deutlich sichtbarer Spalt. In solchen Fällen kann daher eine globale Feinjustierung das globale Fehlerminimum über alle Flächen hinweg ermitteln. In der Praxis sind in etwa 5 globale Optimierzyklen ausreichend, um das Fehlerminimum bzw. eine gleichmäßige Restfehlerverteilung zu erreichen.
3 Rekonstruktion und Modeliierung von Flächen
Ausgangspunkt der Flächenrekonstruktion sind i. a. mehrere "kalibrierte" (d. h. in echten metrischen Koordinaten vorliegende) und justierte Tiefenbilder verschiedener Objektansichten. Die Objektoberfläche muß dabei nicht vollständig abgetastet worden sein. Die Abtastdichte muß auch nicht konstant, sollte jedoch möglichst hoch sein. Die Objektform ist ebenfalls beliebig. Es können auch mehrere Objekte in den Meßfeldern vorhanden sein. Durch die folgenden Verarbeitungsschritte wird aus diesen Daten eine einzige Flächenbeschreibung in Form eines Netzes ebener oder gekrümmter Dreiecke erzeugt:
Netzgenerierung: Aufgrund der matrixförmigen Ordnung der Tiefenbilder ist deren Umwandlung in Dreiecksnetze trivial. Direkt aus den Tiefenbildern werden die Normalen zu jedem Meßpunkt bestimmt und gegebenenfalls durch gewichtete Mittelung gefiltert. Diese dienen dann zur Berechnung gekrümmter Dreiecke und zur Klassifizierung der Meßpunkte nach den Krümmungseigenschaften ihrer Umgebung.
Erste Flächenfilterung: Um die abgetastete Information vollständig zu nutzen, wird die Glättung von Meßfehlern wie Rauschen und Aliasing-Effekten auf den dichten, noch unausgedünnten Daten vorgenommen.
Erste Netzausdünnung: Aus informationstheoretischen Gründen wäre es vorteilhaft, allen folgenden Verarbeitungsschritten die gesamte Abtastinformation zu Verfügung zu stellen. Die Netzausdünnung sollte also erst ganz am Schluß der Verarbeitungskette durchgeführt werden. In der Praxis läßt die enorme Datenmenge eine Verschmelzung der dichten Netze meist nicht zu .. Deshalb wird an dieser Stelle sehr vorsichtig ausgedünnt, d. h. es wird nur ein kleiner Approximationsfehler zugelassen. Die Abbildung 3 zeigt ein derartiges, krümmungsabhängig ausgedünntes Dreiecksnetz.
Verschmelzung: Die Dreiecksnetze der Einzelmessungen können paarweise zu neuen Netzen verschmolzen werden. Normalerweise wird mit einer 'Masteraufnahme' gestartet, die schon einen möglichst großen Bereich der Objektoberfläche erfaßt. In diese werden dann sukzessive die restlichen Messungen eingefügt. Bei der Netzverschmelzung können alle neuen Vertices in das Masternetz eingebaut werden oder nur solche, die einen vorgegebenen Abstand zur bestehenden Interpolationsfläche überschreiten. Im Extremfall wird die Masterfläche nur um die Bereiche der anderen Messungen ergänzt, die nicht mit ihr überlappen.
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 4 von 10
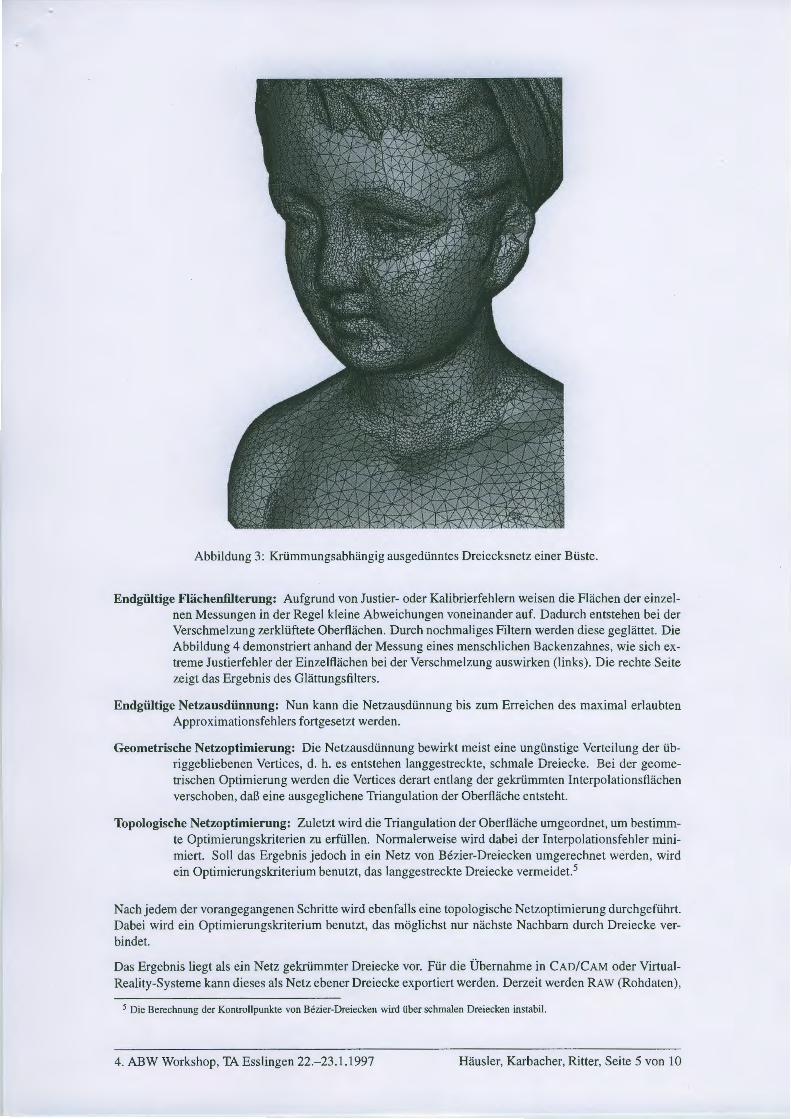
Abbildung 3: Krümmungsabhängig ausgedünntes Dreiecksnetz einer Büste.
Endgültige Flächenfilterung: Aufgrund von Justier- oder Kalibrierfehlern weisen die Flächen der einzelnen Messungen in der Regel kleine Abweichungen voneinander auf. Dadurch entstehen bei der Verschmelzung zerklüftete Oberflächen. Durch nochmaliges Filtern werden diese geglättet. Die Abbildung 4 demonstriert anhand der Messung eines menschlichen Backenzahnes, wie sich extreme Justierfehler der Einzelflächen bei der Verschmelzung auswirken (links). Die rechte Seite zeigt das Ergebnis des Glättungsfilters.
Endgültige Netzausdünnung: Nun kann die Netzausdünnung bis zum Erreichen des maximal erlaubten Approximationsfehlers fortgesetzt werden.
Geometrische Netzoptimierung: Die Netzausdünnung bewirkt meist eine ungünstige Verteilung der übriggebliebenen Vertices, d. h. es entstehen langgestreckte, schmale Dreiecke. Bei der geometrischen Optimierung werden die Vertices derart entlang der gekrümmten Interpolationsflächen verschoben, daß eine ausgeglichene Triangulation der Oberfläche entsteht.
Topologische Netzoptimierung: Zuletzt wird die Triangulation der Oberfläche umgeordnet, um bestimmte Optimierungskriterien zu erfüllen. Normalerweise wird dabei der Interpolationsfehler minimiert. Soll das Ergebnis jedoch in ein Netz von Bezier-Dreiecken umgerechnet werden, wird ein Optimierungskriterium benutzt, das langgestreckte Dreiecke vermeidet.5
Nachjedem der vorangegangenen Schritte wird ebenfalls eine topalogische Netzoptimierung durchgeführt. Dabei wird ein Optimierungskriterium benutzt, das möglichst nur nächste Nachbarn durch Dreiecke verbindet.
Das Ergebnis liegt als ein Netz gekrümmter Dreiecke vor. Für die Übernahme in CAD/CAM oder VirtualReality-Systeme kann dieses als Netz ebener Dreiecke exportiert werden. Derzeit werden RAW (Rohdaten),
5 Die Berechnung der Kontrollpunkte von Bezier-Dreiecken wird über schmalen Dreiecken instabil.
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 5 von 10

Abbildung 4: Beispiel für die Glättung eines extremen Fehlers. Die Einzelflächen weichen im Mittel 1.7 Sampling-Intervalle (1 SI= 0.1mm) voneinander ab, maximal19 SI. Bei der Glättung wurden die Positionen der Vertices im Mittel um 0.7 SI korrigiert, maximal um 10 SI.
DXF (AutoCAD), STL (Stereolithografie), RWX (RenderWare) und WRL (Virtual Reality Modelling Language V2.0)6 unterstützt.
Eine strenge Unterscheidung zwischen Flächenrekonstruktion und -modellierung ist bei diesem Verfahren nicht möglich. Schon bei der Netzgenerierung werden Modellierungsmethoden angewandt (Normalenberechnung, gekrümmte Dreiecke). Durch Überspringen der Schritte zur Filterung und Netzausdünnung ist es jedoch möglich, eine reine Flächenrekonstruktion, ohne Veränderung der Ausgangsdaten durchzuführen. Die Flächenrekonstruktion wird mit Hilfe lokaler topologischer Operationen auf Dreiecksnetzen durchgeführt. Diese beeinflussen nur die Ordnung der Dreiecksnetze oder entfernen bzw. fügen Vertices hinzu. Die Koordinaten der Vertices bleiben dagegen unverändert. Die Flächenmodeliierung beruht auf einer Näherung durch Kreisbogennetze. Dabei wird angenommen, daß die Fläche zwischen zwei Vertices mit konstanter Krümmung verläuft. Da die gemessenen Flächen von diesem vereinfachten Flächenmodell in der Regel abweichen, wird ein Fehlermaß eingeführt, welches diese Abweichungen messen kann. Dieses Fehlermaß dient als Grundlage für den Glättungsfilter und die Interpolation gekrümmter Flächen über geschlossenen Polygonen.
3.1 Experimentelle Ergebnisse
Die durchgeführten Experimente verdeutlichen, daß die wichtigste Voraussetzung für die Anwendbarkeit des vorgestellten Verfahrens in der Praxistauglichkeit des Glättungsverfahrens besteht. Sehr gut funktioniert dieses bei der Glättung von Justier- und Kalibrierfehlern (siehe Abbildung 4). Dabei lassen sich mittlere Fehler von mehr als einem Sampling-Intervall problemlos glätten. Die Filterung von Rauschen ist bis zu einer mittleren Rauschamplitude von ca. 0.3 Sampling-Intervallen ohne Verlust an Objektdetails möglich. Hochwertige optische 3D-Sensoren sollten diese Grenze ohne Probleme unterschreiten. Schwieriger erweist sich die Glättung von Moire-Störungen (Aliasing), da diese eine nicht vorhandene Objektstruktur vortäuschen. Im Vergleich zur Medianfilterung erweist sich das vorgestellte Glättungsverfahren als überlegen (siehe Abbildung 5). Bei gleicher mittlerer Differenz zwischen gefilterten und ungefilterten Daten weist es eine wesentlich höhere Fehlerunterdrückung auf.
Das gesamte Verfahren wurde anband der vollständigen Vermessung verschiedener natürlicher und technischer Objekte getestet. Die Abbildung 6 zeigt das Ergebnis der Modeliierung eines Gipsmodells eines
6 VRML ist der 3D-Standard des 'World Wide Web'
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 6 von 10
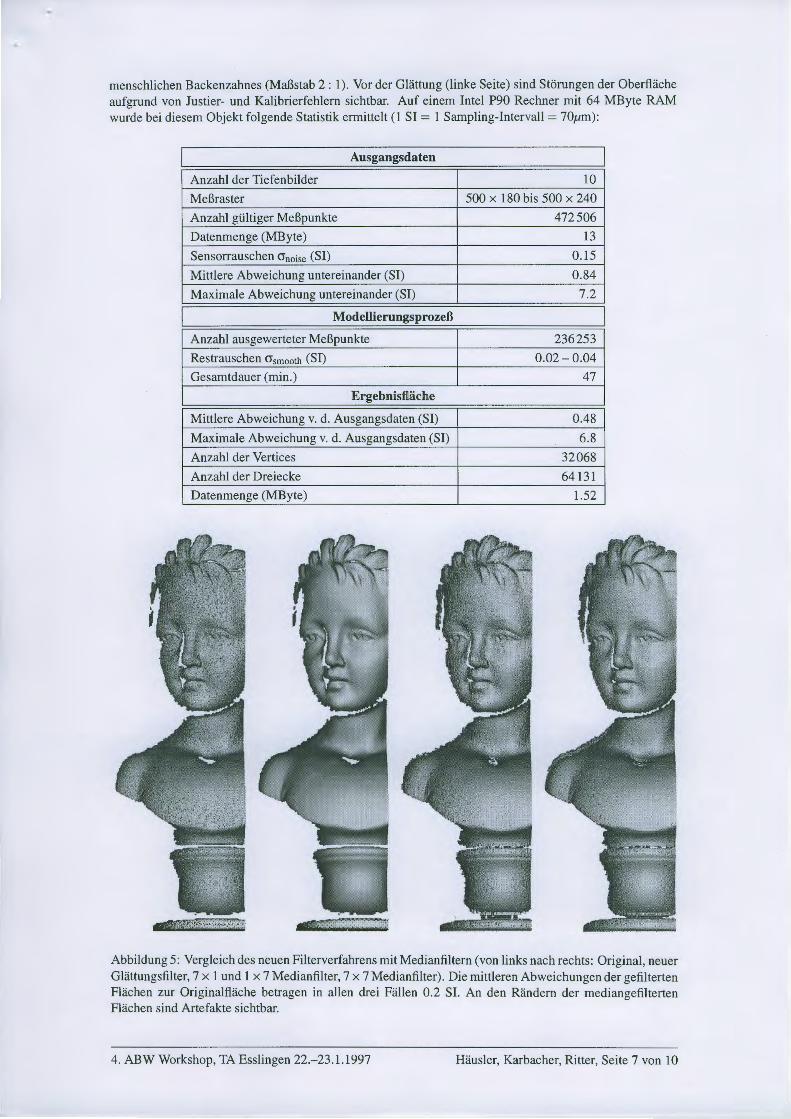
menschlichen Backenzahnes (Maßstab 2 : 1 ). Vor der Glättung (linke Seite) sind Störungen der Oberfläche aufgrundvon Justier- und Kalibrierfehlern sichtbar. Auf einem Intel P90 Rechner mit 64 MByte RAM wurde bei diesem Objekt folgende Statistik ermittelt (1 SI= 1 Sampling-Intervall = 70,um):
Ausgangsdaten
Anzahl der Tiefenbilder 10
Meßraster 500 X 180 bis 500 X 240
Anzahl gültiger Meßpunkte 472506
Datenmenge (MByte) 13
Sensorrauschen O'noise (SI) 0.15
Mittlere Abweichung untereinander (SI) 0.84
Maximale Abweichung untereinander (SI) 7.2
Modellierungsprozeß
Anzahl ausgewerteter Meßpunkte 236253
Restrauschen O'smooth (SI) 0.02-0.04
Gesamtdauer (min.) 47
Ergebnisfläche
Mittlere Abweichung v. d. Ausgangsdaten (SI) 0.48
Maximale Abweichung v. d. Ausgangsdaten (SI) 6.8
Anzahl der Vertices 32068
Anzahl der Dreiecke 64131
Datenmenge (MByte) 1.52
Abbildung 5: Vergleich des neuen Filterverfahrens mit Medianfiltern (von links nach rechts: Original, neuer Glättungsfilter, 7 x 1 und 1 x 7 Medianfilter, 7 x 7 Medianfilter). Die mittleren Abweichungen der gefilterten Flächen zur Originalfläche betragen in allen drei Fällen 0.2 SI. An den Rändern der mediangefilterten Flächen sind Artefakte sichtbar.
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 7 von 10

Abbildung 6: Modellierungsergebnis der Vermessung eines Gipsmodells eines menschlichen Backenzahnes (links: Fläche nach dem Verschmelzen; rechts: Ergebnis der Glättung.)
Die Oberfläche wurde lückenlos vermessen. Die Abweichungen der Ergebnisfläche zu den Ausgangsdaten liegt innerhalb der Toleranzen, die durch die Abweichungen der Ausgangsdaten untereinander gegeben sind. Die geringen Justier- und Kalibrierfehler konnten mit den gewählten Glättungsparametern vollständig unterdrückt werden.
Bei allen untersuchten Meßobjekten konnten bei geschickter Wahl der Parameter und der Verarbeitungsstrategie die meisten Fehler der Datenaufnahme eliminiert oder kaschiert werden. Es ließen sich in der Regel zumindest visuell fehlerfreie Flächen erzeugen. Die Fehler, die von der Modeliierung eingeführt wurden, blieben dabei stets kleiner als die Meßfehler in den Ausgangsdaten. Die Verarbeitungszeiten variierten stark je nach Ausgangsdatenmenge und Meßobjekt. Pro Netzgenerierung (inkl. erster Glättung und Netzausdünnung) wurden auf dem Intel P90 Rechner 1.4 bis 13 Minuten benötigt, pro Netzverschmelzung 50 Sekunden bis 20 Minuten und für die Nachbearbeitung (endgültige Glättung, Netzausdünnung und Optimierungen) 4.5 bis 23 Minuten. Ausgewertet wurden dabei zwischen 180 000 und 600 000 Meßpunkte. Die Menge der Ausgangsdaten lag zwischen 7.5 und 28 MByte. Die erzeugten Flächen benötigen 400 KBytebis 2.3 MByte.
Literatur
[BHS93] Stefan Blossey, Gerd Häusler und Frank Stockinger. A flexible calibration method for range sensors. InAngewandte Optik, Annual Report, Seite 115. Friedrich Alexander Universität Erlangen, 1993.
[BL95] Gerard Blais und Martin D. Levine. Registering multiview range data to create 3d computer objects. IEEE Transactions on Pattern Analysis and Machine Intelligence, 17(8):820-824, August 1995.
[BM92] Paul J. Besl und Neil D. McKay. A method of registration of 3-D shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2):239-256, Februar 1992.
[BS96] K. Brunnström und A. J. Stoddart. Genetic algorithms for free-form surfce matching. In 14th Int. Conference on Pattern Recognition, Vienna, Austria, 1996. http://www.ee.surrey.ac.uk/pub/vision/papers/brunnstrom-icpr96.ps.Z.
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 8 von 10

[CL96]
[EM94]
Brian Curless und Mare Levoy. A volumetric method for building complex models from range images. In Holly Rushmeier, Hrsg., SIGGRAPH 96 Conference Proceedings, Annual Confe-rence Series, Seiten 303-312. ACM SIGGRAPH, Addison Wesley, August 1996.
Herbert Edelsbrunner und Ernst P. Mücke. Three-Dimensional alpha shapes. ACM Transactions on Graphics, 13(1):43-72, Januar 1994.
[HDD+92] Hugues Hoppe, Tony DeRose, Tom Duchamp, John McDonald und Werner Stuetzle. Surface reconstruction from unorganized points. In Edwin E. Catmull, Hrsg., Computer Graphics (SIGGRAPH '92 Proceedings), Band 26, Seiten 71-78, Juli 1992. ftp:/ /es. washington.edu/pub/ graphics/Recon_siggraph92_final. ps.Z.
[Hec88] Werner Hecke!. Lichtschnittverfahren mit erweitertem Meßbereich und hoher Auflösung. Diplomarbeit, Friedrich Alexander Universität Erlangen, April1988.
[HH88] Gerd Häusler und Werner Hecke!. Light sectioning with large depth and high resolution. Applied Optics, 27:5165-5169, 1988.
[HH96] Karl-Heinz Häfele und Markus Hellmann. 3D-Meßdatenaufbereitung und Weiterverarbeitung. In H. Wolf, Hrsg., Optische 3D-Formerfassung großer Objekte, 2. ABW-Workshop 25.-26.1.96, Technische Akademie Esslingen, 1996.
[HK94] Gerd Häusler und Stefan Karbacher. U sing range images instead of point cloud data for 3d surface modeling. In Optik, Annual Report, Seite 72. Friedrich Alexander Universität Erlangen, 1994.
[HK95] Gerd Häusler und Stefan Karbacher. A new method for geometric modeling of range data. In Lehrstuhlfür Optik, Annual Report, Seite 27. Friedrich Alexander Universität Erlangen, 1995.
[HKR96] Gerd Häusler, Stefan Karbacher und Dieter Ritter. Reverse Engineering mit Hilfe optischer 3DSensoren. In H. Wolf, Hrsg., Optische 3D-Formerfassung großer Objekte, 2. ABW-Workshop 25.-26.1.96, Technische Akademie Esslingen, 1996.
[HL93] Gerd Häusler und Ralf Lampalzer. Vorrichtung zur Erzeugung streifenartiger Lichtstrukturen. Deutsche Patentanmeldung DE 4242830, 1993.
[HN92] Gerd Häusler und Jochen Neumann. Coherence radar-an accurate 3-d sensor for rough surfaces. In Donald J. Svetkoff, Hrsg., Optics, Illumination and Image Sensing for Machine Vision VII, Band 1822 der Reihe SPIE Proceedings, Boston, November 1992.
[Hor87] Berthold K. P. Horn. Closed-form solution of absolute orientation using unit quaternions. Journal ofthe Optical SoCiety of America A, 4(4):629-642, April1987.
[HR94] Gerd Häusler und Dieter Ritter. Feature based object recognition in 3d space. In Optik, Annual Report, Seite 70. Friedrich Alexander Universität Erlangen, 1994.
[HR95] Gerd Häusler und Dieter Ritter. 3d matehing of range images to synthesize the whole object surface. In Lehrstuhl für Optik, Annual Report, Seite 26. Friedrich Alexander Universität Erlangen, 1995.
[HS92] Gerd Häusler und Frank Stockinger. Calibration of the light sectioning sensor. InAngewandte Optik, Annual Report, Sei~e 18. Friedrich Alexander Universität Erlangen, 1992.
[HS94] Gerd Häusler und Frank Stockinger. Calibration of optical range sensors-an underestimated problem. In Optik, Annual Report, Seite 55. Friedrich Alexander Universität Erlangen, 1994.
[HSS95] Gerd Häusler, Harald Schönfeld und Frank Stockinger. Calibration of a 3d video camera. In Lehrstuhlfür Optik, Annual Report, Seite 16. Friedrich Alexander Universität Erlangen, 1995.
[HSS96] Gerd Häusler, Harald Schönfeld und Frank Stockinger. Kalibrierung von optischen 3DSensoren. Optik, 102(3):93-100, Mai 1996.
[Kar93] Stefan Karbacher. Surface reconstruction from multiple range images. InAngewandte Optik, Annual Report, Seite 119. Friedrich Alexander Universität Erlangen, 1993.
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 9 von 10
[KL96] Yenkat Krishnamurthy und Mare Levoy. Fitting smooth surfaces to dense polygon meshes. Forschungsbericht, Computer Science Department, Stanford University, Stanford, CA, 1996. http://www-graphics.stanford.edu/papers/surfacefitting/surfacefitting.ps.gz.
[Lam94] Ralf Lampalzer. Untersuchungen zur optimalen Codierung der Beleuchtung bei Abstandssensoren. Diplomarbeit, Friedrich Alexander Universität Erlangen, 1994.
[MB89] Werner H. Mörmann und Marco Brandestini. Die CEREC Computer Reconstruction- Inlays, Onlays und Veneers. Quintessenz Verlags-GmbH, Berlin, 1989.
[Neu89] Peter J. Neugebauer. Feinjustierung von Tiefenbildern zur Vermessung von kleinen Verformungen. Diplomarbeit, Friedrich Alexander Universität Erlangen, Februar 1989.
[Neu92] Peter J. Neugebauer. Hochgenaue Objektlokalisation in Tiefenbildern. In VisualisierungRolle von Interaktivität und Echtzeit, Sankt Augustin, Juni 1992. Gesellschaft für Mathematik und Datenverarbeitung mbH.
[NS96] Peter J. Neugebauer und Carsten Schimpf. Effiziente Skulpturierung von 3D-Modellen aus Tiefenbildern. In H. Wolf, Hrsg., Optische 3D-Formerfassung, 3. ABW-Workshop 18.-19.6.96, Technische Akademie Esslingen, 1996.
[Rit96] Dieter Ritter. Merkmalsorientierte Objekterkennung und -Lokalisation im 3D-Raum aus einem einzelnen 2D-Grauwertbild und Referenzmodellvermessung mit optischen 3D-Sensoren. Dissertation, Friedrich Alexander Universität Erlangen, Juli 1996.
[SB96] A. J. Stoddart und K. Brunnström. Free-form surfce matehing using mean field theory. In British Machine Vision Conference, Edinburgh, UK, 1996. http://www.ee.surrey.ac.uk/pub/vision/papers/stoddart-mft-bmvc96.ps.Z.
[SH96] A. J. Stoddart und A. Hilton. Registration of multiple point sets. In 14th Int. Conference on Pattern Recognition, Vienna, Austria, 1996. http://www.ee.surrey.ac.uk/pub/vision/papers/stoddart-icpr96.ps.Z.
[Sto96] Frank Stockinger. Kalibrierung von optischen 3D-Sensoren. Dissertation, Friedrich Alexander Universität Erlangen, 1996.
[TL94] Greg Turk und Mare Levoy. Zippered polygon meshes from range images. In Andrew Glassner, Hrsg., Proceedings of SIGGRAPH '94 (Orlando, Florida, July 24-29, 1994), Computer Graphics Proceedings, Annual Conference Series, Seiten 311-318. ACM SIGGRAPH, ACM Press, Juli 1994. http://www-graphics.stanf~rd.edu/papers/zipper/zipper.ps.
[Vel92] Remco Coenraad Veltkamp. Closed Object Boundariesfrom Scattered Points. Gegevens Koninklijke Bibliotheek, Den Haag, 1992. ISBN 90-9005424-3.
4. ABW Workshop, TA Esslingen 22.-23.1.1997 Häusler, Karbacher, Ritter, Seite 10 von 10








![Das Ganze sehen. - meterq.de · Die Schwankungen können bis zu max. 1,5 kWh/m3 betragen [2]. Die Die Variation der Gasbeschaffenheit in der Gaswirtschaft schlägt bis zum Gasverwender](https://img.pdfslide.net/doc/110x75/5d609ea288c99361448b9b62/das-ganze-sehen-die-schwankungen-koennen-bis-zu-max-15-kwhm3-betragen.jpg)






![Erfahrungen mit neuartigen Brennwertgebern · 1,5 kWh/m 3 betragen [2]. Die Variation der Gasbeschaffenheit in der Gaswirt - schaft schlägt bis zum Gasverwender durch. Die Auswirkungen](https://img.pdfslide.net/doc/110x75/5d609ea288c99361448b9b55/erfahrungen-mit-neuartigen-brennwertgebern-15-kwhm-3-betragen-2-die-variation.jpg)













