-
Fusion Between Laser and Stereo Vision Data For Moving
ObjectsTracking In Intersection Like Scenario
Qadeer Baig, Olivier Aycard, Trung Dung Vu and Thierry
Fraichard
Abstract— Using multiple sensors in the context of environ-ment
perception for autonomous vehicles is quite common thesedays.
Perceived data from these sensors can be fused at differentlevels
like: before object detection, after object detection andfinally
after tracking the moving objects. In this paper we detailour
object detection level fusion between laser and stereo
visionsensors as opposed to pre-detection or track level fusion.
Weuse the output of our previous laser processing [2] to get a
listof objects with position and dynamic properties for each
object.Similarly we use the stereo vision output of another team
[7],[8] which consists of a list of detected objects with position
andclassification properties for each object. We use Bayesian
fusiontechnique on objects of these two lists to get a new list of
fusedobjects. This fused list of objects if further used in
trackingphase to track moving objects in an intersection like
scenarioand has improved the data association and track
managementsteps. The results obtained on data sets of
INTERSAFE-2demonstrator vehicle show effectiveness of our
techniques.
I. INTRODUCTION
Perceiving or understanding the environment surroundinga vehicle
is a very important step in driving assistancesystems and for the
functioning of autonomous vehicles.The task involves solving both
simultaneous localization andmapping (SLAM) and detection and
tracking of movingobjects (DATMO) problems. While SLAM provides
thevehicle with a map of the environment, DATMO allows thevehicle
being aware of dynamic entities around, trackingthem and predicting
their future behaviors. If we are ableto accomplish both SLAM and
DATMO reliably in realtime, we can detect critical situations to
warn the driver inadvance and this will certainly improve driving
safety andcan prevent traffic accidents. We use multiple sensors
onthe vehicle to observe the surrounding environment to solvethese
problems, since a single sensor can provide only alimited view of
the environment.
A great deal of work has been done to solve theseproblems using
different sensors, especially laser scanners[2], [12], [9], [5],
[14]. In most of these works occupancygrids [4] framework has been
used to represent the sur-rounding environment. Although using high
resolution laserscanners (less than 1◦) we are able to obtain good
mapsof the environment [12] but tracking moving objects in acomplex
intersection like scenario using laser scanner onlyis quite
challenging due to temporary occlusions and manydifferent
directions of movements. So there is a strong needto use multiple
sensors to solve this tracking problem. Butusing multiple sensors
inherently requires to perform fusion
Authors are with University of Grenoble1 & INRIA
Rhône-Alpes, Greno-ble, France, (e-mails:
[email protected], [email protected]
[email protected], [email protected])
between them at some appropriate level so as to get
optimalresults. This fusion can take place at three different
levels:i) before objects detection, also called low level fusion,
forexample an occupancy grid is constructed for each sensorand
fusion is performed to get a fused occupancy grid, ii)at objects
detection level, output of each sensor is processedto extract lists
of objects (or obstacles) in the environmentand information about
corresponding objects in these listsare fused to get fused list of
objects, and iii) at track level,output of each sensor is processed
to do tracking of movingobjects and then fusion is performed on
detected tracks (atrack is a moving object detected consistently in
few previousframes), fusion at this level is usually performed to
confirmtracks detected by a primary sensor.
In this work we have developed a generic architecture forobject
detection level fusion between different sensors andtracking the
fused list of objects (figure 1). This architecturehas two levels:
the first level deals with the pre processingof sensors for
detecting objects with properties specific tosensors and then
performing fusion between these lists of ob-jects. The fusion at
this level involves finding correspondingobjects in the lists and
merging their properties, this gives afused list of objects with
individual objects having more stateinformation than their pre
fusion versions. Second level dealswith tracking of the fused
objects. In this work we have usedthis architecture to perform
fusion between objects detectedby laser and stereo vision in the
context of a Europeanproject INTERSAFE-2 1 on Volkswagen
demonstrator. Weperform the laser processing to construct local
grid map andto detect moving objects in the environment, the output
ofstereo vision processing consists of a list of 3D objects
withclassification information. After fusion objects have
position,dynamic state and classification information which result
inmore precise tracking results. Due to this fusion we alsoget good
tracks for occluded or transparent objects for lasersensor.
Fusion between laser and stereo vision on other two levels(pre
detection and track levels) has some issues, for exampleoccupancy
grids constructed for stereo vision for low levelfusion have many
false positives and many filtrations needbe done to refine them
[6], moreover due to high depthuncertainty for stereo sensor most
of the weight is givento laser occupancy grid [1]. Baltzaksi et al.
[3] have usedthis low level fusion technique for indoor robot
navigation.Similarly at track level, due to small field of view
andlimited range of stereo vision, there are many mis
detections
1http://www.intersafe-2.eu
-
Fig. 1. Architecture of the perception system (SVS=Stereo Vision
Sensorand LS=Laser Sensor).
because moving objects quickly go out of sight before theyare
confirmed as tracks.
The rest of the paper is organized as follows. In the
nextsection we present the demonstrator used for this work
andsensors installed on it. We summarize our work [2] on
laserprocessing to build a map of the environment, localize ourego
vehicle inside this map and detect moving objects insection III. In
section IV we introduce the stereo-visionprocessing done by
University of Cluj. In section V, we detailour work on fusion with
tracking in section VI. Experimentalresults are reported in section
VII. We conclude this work insection VIII.
II. EXPERIMENTAL SETUP
The Volkswagen demonstrator vehicle used to get datasetsfor this
work has multiple sensors installed on it. It has along range laser
scanner (Lidar) with a field of view of 160◦
and a maximum range of 150 m. It has 161 laser beamscalled
channels and resolution of 1◦. It has a measurementpulse width of
16ns. Each channel can detect a maximumof two targets with vertical
divergence of 3◦. A channeldetects two targets because each laser
beam scans two planes:horizontal and another with a vertical
divergence of 3◦, if theobject detected in the second plane is not
the same as thatof first plane then it is reported as second target
(using adistance threshold to decide the second target). In our
workwe only use the nearest target. Other sensors installed onthis
demonstrator include a stereo vision camera, four shortrange radars
(SRR) one at each corner of the vehicle anda long range radar (LRR)
in front of the vehicle (figure. 2).Our work in this paper is only
concerned with the processingand fusion of Lidar and stereo vision
data. For both of thesesensors we have following two reference
frames:
• Stereo (with origin on the ground plane exactly belowthe laser
scanner, z-axis pointing in the direction ofdriving and x-axis
towards right)
• Laser (with origin fixed on the laser scanner, y-axispointing
in the direction of driving and x-towards right).
Fig. 2. Sensors installed on the demonstrator vehicle
These frames of reference are fixed w.r.t each other and
theirtransformation matrices are known.
III. LASER PROCESSING
In this section we summarize our laser processing [2] thatwe
have used for moving objects detection with laser datawith details
of improvements done for current work. Thisprocess consists of
following steps: first we construct a localgrid map and localize
the vehicle in this map, then using thismap we classify individual
laser beams in the current scanas belonging to moving or static
parts of the environment,finally we segment the current laser scan
to make objectsfrom individual laser beams.
A. Environment Mapping & Localization
We have used incremental mapping approach based onlaser scan
matching algorithm to build a local vehicle map.Based on occupancy
grid representation the environment isdivided into a two
dimensional lattice of rectangular cellsand we keep track of
probabilistic occupancy state of eachcell. We build a grid map of
90m × 108m with each cellhaving dimensions of 0.3m×0.3m.
Environment mapping isessentially the estimate of posterior
probability of occupancyP (m |x1:t, z1:t) for each cell of grid m,
given observationsz1:t = {z1, ..., zt} from time 1 to time t at
correspondingknown poses x1:t = {x1, ..., xt}, here zt = {Pi}
wherePi = (x = ri cos θi, y = ri sin θi) is the impact point
(ordetected target position) by ith laser beam (from its
polarcoordinates ri, θi) for ∀i ≤ 161 expressed in laser frameof
reference, and xt = (x, y, θ) is the vehicle pose. Toknow these
pose values we need to solve the localizationproblem. We have used
a particle filter based on importancesampling for this purpose (as
explained in [11]), a total of300 particles are used. For the given
previous pose xt−1 andcurrent odometry information ut = (ν, ω)
(translational and
-
rotational velocities) we sample different possible positionsof
the vehicle (ie, one position of the vehicle correspondsto one
particle) from the motion model P (xt|ut, xt−1).Then we compute the
probability of each position (ie, theprobability of each particle)
using the laser data and asensor model. Practically, from the pose
of each particle,we calculate the fraction of the laser beams
terminating inoccupied cells of the grid map constructed so far.
The poseof the particle getting highest probability is taken as
truepose. The localization process takes on average 14ms on
acomputer with 3.0GHz processor and 4GB of RAM.
B. Moving & Static Parts DistinctionUsing the local grid map
constructed so far we classify
the laser impact points in the current laser scan as dynamicor
static by comparing them with the map.The principal ideais based on
the inconsistencies between observed free spaceand occupied space
in the local map. Laser impacts observedin free space are
classified as dynamic whereas the rest areclassified as static.
More precisely, if we represent the localgrid map at time t as M t
= {m} where m is a grid cell andif M t[Pi] gives the occupancy
probability of the grid cellcorresponding to the laser impact point
Pi then we classifythe laser impact points into following two
types:
• MovingPoints = {Pi |M t[Pi] < 0.5}• StaticPoints = {Pi |M
t[Pi] ≥ 0.5}
C. Laser Objects ExtractionFinally we perform segmentation to
extract objects from
these laser impact points. We define an object as:
ÓL = {Pn | dist(Pn, Pn−1) < Sthr}
Here Pi is the impact point as defined above ,dist(Pn, Pn−1) is
the euclidean distance between two ad-jacent points, and Sthr is
the segment threshold distancewhich is equal to 2.0 meters in our
experiments. An object ismarked as dynamic if ÓL ∩MovingPoints 6=
φ, ie at leastone of its constituting laser points is classified as
dynamic,otherwise it is considered a static object. Finally we
calculatethe polar coordinates of center of gravity (centroid) (rL,
θL)of each object using Cartesian coordinates of its
constitutingpoints as:
rL =√x́2 + ý2
andθL = atan2(ý, x́)
where x́ =∑
i x/n and ý =∑
i y/n for ∀Pi(x, y) ∈ ÓLand n = |ÓL|.
D. Laser Processing OutputThe output of laser processing step at
time t consists of a
local grid map M t, and a list of detected moving
objectsLtobjects = {OL} where OL = (ÓL, rL, θL) is movingobject
with centroid information (we do not include the staticobjects in
this list because they need not be tracked). Gridmap is only used
to display on the screen whereas list ofdynamic objects is used
further for fusion. The results oflaser processing are shown in the
figure 3.
Fig. 3. Mapping and moving objects detection results. Detected
movingobjects (a bicycle in left image and two cars in right image)
are shown asgreen rectangles.
IV. STEREO VISION PROCESSING
Another team from University of Cluj-Napoca Romaniaworking on
INTERSAFE-2 project has performed the stereovision processing [7],
[8]. Their output of stereo visionprocessing consists of a list of
objects detected in each frameof the stereo images (figure 4). For
each object in the listwe are given 3D coordinates of the four
corners of the lowerrectangle of the object cuboid in stereo frame
of reference,the height of the top rectangle and the class of the
object(pedestrian, pole vehicle etc), but no information about
thedynamic state of the object are available, objects can bedynamic
or static. From this data we can easily calculatethe coordinates of
the eight corners of the cuboid.
A. Pre-Fusion Processing
The first step before performing fusion between data fromlaser
and stereo vision objects, is to project the objectsdetected by
stereo processing onto the laser plane to achievethe common spatial
reference using transformation matricesfrom stereo towards laser
frame of reference. The results ofthis projection of stereo objects
onto laser plane are shownin figure 4. For object level fusion
between laser and stereowe need to represent the vision objects by
their centroids.We take this centroid as the middle point of the
front linesegment of the object rectangle obtained after
projectioninto the laser plane (this point gives good results than
thecenter of gravity of this rectangle because laser readings
alsobelong to the front end of the object). We calculate the
polarcoordinates of this centroid of each vision object (in a
similar
-
Fig. 4. Stereo processing results, with objects projected on
laser plane.
way as explained for laser objects) to make the
representationcompatible to the laser objects for fusion.
B. Stereo Vision Processing Output
The output of the stereo vision processing at time tconsists of
a list of objects V tobjects = {OV } where OV =(rV , θV , class).
rV and θV are the polar coordinates of theobject centroid. We also
save the rectangle of the object inthe laser plane just to show
them as rectangle in the results.But only centroid and class
information are used for fusion.
V. LASER AND STEREO DATA FUSION
In this section we give details of object detection levelfusion
between laser and stereo vision sensors. As inputto the fusion
process we have two lists of objects: list ofdynamic objects
detected by laser and represented as centroidpoints, and list of
objects (static or dynamic) detected bystereo vision represented as
points along-with classificationinformation. We believe that an
object detection level fusionbetween these two lists can complement
each other thusgiving more complete information about the states of
objectsin the environment. This fusion process consists of
followingtwo steps:
A. Object Association
In this step we determine which stereo objects are to
beassociated to which laser objects from the two object lists,using
nearest neighbor technique. The positional uncertaintyof an object
given by stereo vision increases with depth, so
we have defined a distance threshold function based on thedepth
of the stereo object from the origin as:
Vthr = 5 ∗rV20
Vthr is the uncertainty in position of an object detectedat a
distance of rV by stereo vision. Here 5 in meters isthe maximum
depth uncertainty for an object detected at adistance of 20 meters.
Stereo objects beyond this distanceare ignored because the
effective range of stereo is limitedto 20m for this work. A stereo
object OiV is associated to alaser object OjL if dist(O
iV , O
jL) < Vthr and O
jL is closest
to OiV .
B. Position information fusion
This step works on the pair of objects associated with eachother
in the previous step and fuses their position (rangeand bearing)
information. We model the position uncertaintyusing 2D Gaussian
distribution for both objects. SupposePL = [rL, θL]
T is the centroid position of laser object andPV = [rV , θV
]
T is the centroid position of associated stereovision object. If
X is the true position of the object then theprobability that laser
detects this object at point PL is givenas:
P (PL|X) =e
−(PL−X)T R
−1L
(PL−X)2√
|RL|82πand similar probability for stereo object is given
as:
P (PV |X) =e
−(PV −X)T R
−1V
(PV −X)2√
|RV |82πHere RL is the 2X2 covariance matrix of range and
bearinguncertainty calculated from the uncertainty values
providedby the vendor. Whereas RV is the covariance matrix
forstereo vision and depends on the depth of the object fromorigin,
we have empirically calculated its values for differentranges. In
general range and bearing uncertainty for stereoobjects is much
higher than the corresponding objects de-tected by laser and
increases with distance from the origin.Also, range uncertainty for
stereo is greater than the bearinguncertainty in general. Using
Bayesian fusion the probabilityof fused position P = [rF , θF ]T is
given as:
P (P |X) = e−(P−X)T R−1(P−X)
2√|R|82π
where P and R are given as:
P =PL/RL + PV /RV
1/RL + 1/RV
and1/R = 1/RL + 1/RV
respectively. This process of fusion is shown in figure 5. Pis
taken as the position of the fused object.
The result of this fusion process is a new list of fusedobjects.
This list also has all the laser objects which couldnot be
associated with stereo objects and all the stereo
-
Fig. 5. Fusion process: red color shows the position uncertainty
of laserobject, green color for corresponding stereo object and
violet the fusionresult of the two.
objects which could not be associated with some laserobjects. We
keep un associated stereo objects because theymay correspond to
dynamic objects which may not havebeen detected by laser in current
frame due to occlusion asexplained next.
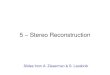
Figure 6 shows an interesting fusion scenario, objectsshown in
cyan color are the objects detected by stereo visionwhereas the
objects shown by light violet rectangles are thelaser detected
objects, red dots are raw laser impact points.An oncoming car that
was being detected by laser until lastscan is now occluded by a
cyclist whereas stereo systemwas able to detect this car. So this
mis detection by laserwill be filled in by stereo during fusion
hence giving asmooth track. The increased position uncertainty with
depthfor stereo vision objects can also be seen in the figure
(greenellipses).
C. Fusion Output
The output of fusion process consists of fusedlist of objects F
tobjects = {OF } where OF =(rF , θF , class,DynamicState,
SensorCount). For eachobject we have position (centroid)
information, dynamicstate information (dynamic or unknown, unknown
for unassociated stereo objects), classification information and
acount for number of sensors detecting this object. For eachfused
object we also have a pointer to the original laser orstereo object
to use segment or rectangle information whiledisplaying the tracked
object.
VI. TRACKING
In general, the multi objects tracking problem is complex:it
includes the definition of tracking methods, but also associ-ation
methods and maintenance of the list of objects currentlypresent in
the environment. Bayesian filters are usually usedto solve tracking
problem. These filters require the definitionof a specific motion
model of tracked objects to predicttheir positions in the
environment. Using the prediction
Fig. 6. Laser and Stereo vision objects fusion, see the text for
details.
and observation update combination, position estimation foreach
object is computed. In the following we explain thecomponents of
our tracking module.
A. Data Association
This step consists of assigning new objects of fusedlist to the
existing tracks. Since in the current work weare more concerned
with tracking multiple objects in anintersection like scenario so
it is important to choose a moreeffective technique of data
association. In an intersectionlike scenario there may be many
objects moving in differentdirections. They may be crossing or
waiting to cross ina direction perpendicular to the oncoming
vehicles, forexample a vehicle waiting to turn left etc. We have
usedMHT [10] approach to solve the data association problem.An
important optimization that we have achieved here dueto fusion
process mentioned above is related to classificationinformation
provided by stereo vision. While generatinghypotheses we ignore all
those hypotheses which involveobjects from different classes. For
example a hypothesistrying to involve a pedestrian with a vehicle
in a track will beignored, this significantly reduces the number of
hypotheses.To further control the growth of tracks trees we need
to
-
use some pruning technique. We have chosen the N-Scanspruning
technique to keep the track trees to a limit of N.
B. Track Management
In this step tracks are confirmed, deleted or created usingthe
m-best hypotheses resulting from the data associationstep. New
tracks are created if a new track creation hypoth-esis appears in
the m-best hypothesis. A newly created trackis confirmed if it is
updated by objects detected in currentframes after a variable
number of algorithm steps (one stepif the object was detected by
both laser and stereo visionotherwise in three steps). This implies
that the spuriousmeasurements which can be detected as objects in
the firststep of our method are never confirmed. To deal with
non-detection cases, if a non-detection hypothesis appear (whichcan
appear for instance when an object is occluded byan other one)
tracks having no new associated objects areupdated according to
their last associated objects and forthem next filtering stage
becomes a simple prediction. Inthis way a track is deleted if it is
not updated by a detectedobject for a given number of steps.
C. Filtering
Since in an intersection like scenario there may be dif-ferent
types of objects (vehicles, motor bikes, pedestriansetc) moving in
different directions using different motionmodes, a single motion
model based filtering technique is notsufficient. To address the
tracking problem in this scenariowe have used an on-line adapting
version of InteractingMultiple Models (IMM) filtering technique.
The details ofthis technique can be found in our other published
work [13].We have seen that four motion models (constant
velocity,constant acceleration left turn and right turn) are
sufficientto successfully track objects on an intersection. We use
fourKalman filters to handle these motion models. Finally themost
probable trajectories are computed by taking the mostprobable
branch and we select one unique hypothesis for onetrack tree.
Tracking results of two cars are shown in figure 7.
VII. RESULTS
Fusion and tracking results are shown in figures 8 and
9along-with the images of corresponding scenarios. Figure 8shows an
interesting scenario in intersection for fusion, leftimage shows
the tracking results based only on laser data,the car behind the
cyclist was occluded in last few framesgiving insufficient impact
points to be detected as a movingobject, the right image shows the
tracking with fusion, carwas also partially detected by stereo
vision and hence in thefused results it was tracked successfully.
Figure 9 shows asimilar scenario, the ego vehicle is waiting for
the signal, atruck turning left, a cyclist and a pedestrian
crossing the roadin opposite directions are being tracked. Although
truck inthis scenario is partially occluded by the cyclist but due
tofusion it has been tracked successfully. A results video canbe
found here2.
2https://sites.google.com/site/qadeerbaig/fusionresults
Fig. 7. Tracking results for two cars.
VIII. CONCLUSION
In this paper we have presented our approach for fusionbetween
laser scanner and stereo-vision at the object detec-tion level as
opposed to pre-detection or track level. Wehave demonstrated how
the fused objects have more stateinformation than their pre-fusion
versions. This fusion hasimproved the data association and track
management stepsin the tracking phase. Experimental results on a
Volkswagendemonstrator vehicle in the scope of the European
projectINTERSAFE-2 show the effectiveness of the work presentedin
this paper.
IX. ACKNOWLEDGEMENTS
This work was conducted within the research projectINTERSAFE-2.
INTERSAFE-2 is part of the 7th FrameworkProgramme, funded by the
European Commission. The part-ners of INTERSAFE-2 thank the
European Commission forsupporting the work of this project.
REFERENCES
[1] Q. Baig and O. Aycard. Low level data fusion of laser and
monocularcolor camera using occupancy grid framework. In
InternationalConference on Control, Automation, Robotics and Vision
(ICARCV),Singapore, December 2010.
[2] Q. Baig, TD. Vu, and O. Aycard. Online localization and
mappingwith moving objects detection in dynamic outdoor
environments. InIEEE Intelligent Computer Communication and
Processing (ICCP),Cluj-Napoca, Romania, August 2009.
[3] H. Baltzakis, A. Argyros, and P. Trahanias. Fusion of laser
and visualdata for robot motion planning and collision avoidance.
Mach. VisionAppl., 15(2):92–100, 2003.
-
Fig. 8. Fusion and tracking results. Left(laser only): car
occluded by cyclistis not being tracked. Right(laser and stereo):
with fusion car was trackedsuccessfully.
Fig. 9. Tracking results for a Truck, a pedestrian and a
cyclist.
[4] A. Elfes. Occupancy grids: a probabilistic framework for
robotpercpetion and navigation. PhD thesis, Carnegie Mellon
University,1989.
[5] D. Hähnel, R. Triebel, W. Burgard, and S. Thrun. Map
building withmobile robots in dynamic environments. In Proceedings
of the IEEEInternational Conference on Robotics and Automation
(ICRA), 2003.
[6] D. Murray and J. Little. Using real-time stereo vision for
mobile robotnavigation. In Autonomous Robotics, 2000.
[7] S. Nedevschi, R. Danescu, T. Marita, F. Oniga, and S.
Bota.Stereovision-based sensor for intersection assistance. In
AdvancedMicrosystems for Automotive Applications 2009, pages
129–163.Springer Berlin Heidelberg, 2009.
[8] S. Nedevschi, T. Marita, R. Danescu, F. Oniga, and S. Bota.
On-board stereo sensor for intersection driving assistance.
architectureand specification. In IEEE Intelligent Computer
Communication andProcessing (ICCP), pages 409–416, Cluj-Napoca,
Romania, August2009.
[9] E. Prassler, J. Scholz, and P. Fiorini. Navigating a robotic
wheelchair ina railway station during rush hour. Int. Journal on
Robotics Research,18(7):760–772, 1999.
[10] D. B. Reid. A multiple hypothesis filter for tracking
multiple targetsin a cluttered environment. Technical Report
D-560254, LockheedMissiles and Space Company Report, 1977.
[11] S. Thrun, W. Burgard, and D. Fox. Probabilistic Robotics
(IntelligentRobotics and Autonomous Agents). The MIT Press,
September 2005.
[12] TD. Vu, O. Aycard, and N. Appenrodt. Online localization
and map-ping with moving objects tracking in dynamic outdoor
environments.In IEEE International Conference on Intelligent
Vehicles, 2007.
[13] TD. Vu, J. Burlet, and O. Aycard. Grid-based localization
and localmapping with moving objects detection and tracking.
InternationalJournal on Information Fusion, Elsevier, 2009. To
appear.
[14] C.-C. Wang. Simultaneous Localization, Mapping and Moving
ObjectTracking. PhD thesis, Robotics Institute, Carnegie Mellon
University,Pittsburgh, PA, April 2004.