-
7/21/2019 Gardening Robot
1/92
Master-Thesis
Gardening Robotics
Design of a Seed-Planting Robot for theCreation of Large-Scale
Growing Flower
Images
Spring Term 2011
Supervised by: Authors:
Dr. Cedric Pradalier !SL " Stefan RiesenDr. Pa#l $eardsle%
DR& Lin#s RohrerDr. 'o(ciech Mat#si) DR&
-
7/21/2019 Gardening Robot
2/92
Contents
Abstract
Abstract (German)
ist o! "igures
ist o! Tab#es
$re!ace
1 %ntroduction
iii
v
vii
i&
&i
1
-
7/21/2019 Gardening Robot
3/92
*.* Pro(ect Goals and Re+#irements . ........ . . . . . . . . .
. . **.*.* ,rganiation . . . . . . . . ........ . . . . . . . . . .
.
**.*. Seed /ro/erties . . . . . . . ...... .. .
. . . . . . . . . . *. Related 'or) . . . . . . . . . . . .
........ . . . . . . . . . . . 0
*..* Robotics in !gric#lt#re and 1ortic#lt#re . . . . . . . . .
. .0*.. Seed Deli2er% S%stems . . . ... ... ... . . . . . . . . .
.0*..0 Creation of Flower Images . ......... . . . . . . . . . .
3
2 Seed 'e#ivery System
.* $asic Princi/les . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 4.*.* Selection Princi/le . . . . . . . . . . . . .
. . . . . . . . . . .
4.*. Deli2er% Princi/les . . . . .
. . . . . . . . . . . . . . . . . . .5.*.0 Placement Princi/les
. . . .
. . . . . . . . . . . . . . . . . . . 6. Conce/t . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 7
..* Seed Selection Mechanism . . . . . . . . . . . . . . . . . .
. .7.. 8(ection Mechanism . . . .
. . . . . . . . . . . . . . . . . . . 9.0 8ngineering . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . *:
.0.* Selection Mechanism . . . . . . . . . . . . . . . . . . . .
. . . *:.0. 8(ection . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . *:
.3 8;tendabilit% and Possible Im/ro2ements . . . . . . . . . . .
. . . . *3.3.* More Seed T%/es . . . . . . . . . . . . . . . . . .
. . . . . . . *3.3. Sensors on the Sliders . . . . . . . . . . . .
. . . . . . . . . . *3
*+,Tab#e !or Ti#ing 1
0.* Conce/t . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . *40.*.* S#bstrate . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . *40.*. Gl#e . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . *4
0. 8ngineering . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . *60..* Mechanical Design . . . . . . . . . . . . . .
. . . . . . . . . . *60.. 8lectronic S%stem . . . . . . . . . . . .
. . . . . . . . . . . . *7
0.0 Software . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . :0.0.* Gra/hical
-
7/21/2019 Gardening Robot
4/92
4.3 Re+#ired Com/onents and Sie 8stimation . . . . . . . . . . .
. . . 064.3.* ,2er2iew . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 064.3. Mani/#lator . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 3:
4.4 Control . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 3:4.4.* Pose 8stimation . . . . . . . . . . . . . .
. . . . . . . . . . . 3:4.4. Planting . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 3:4.4.0 Path Planning . . . . . . . .
. . . . . . . . . . . . . . . . . . 3
4.5 !2ailable Platforms . . . . . . . . . . . . . . . . . . . .
. . . . . . . 33
/ Conc#usion and ut#oo -
5.* Concl#sion . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 345. ,#tloo) and F#t#re 'or) . . . . . . . . . . . .
. . . . . . . . . . . . 34
5..* 8ngineering of the Mobile Platform . . . . . . . . . . . .
. . 345.. Grass seeding . . . . . . . . . . . . . . . . . . . . . .
. . . . . 35
A 'atasheets -
3 Test Resu#ts
C Content o! the '4' /
3ib#iography /5
ii
-
7/21/2019 Gardening Robot
5/92
Abstract
This /ro(ect deals with the de2elo/ment of a robot that is able
to /lant a small n#mber ofseeds of diferent s/ecies at /redefined
/ositions for the creation of grow- ing >ower images.For this
/#r/ose a seed deli2er% s%stem that is able to select deli2er and
/lace the seeds wasengineered. This mechanism has been integrated
into a Cartesian robot which can /lant a tile
of one s+#are meter on a trans/ortable s#bstrate. It %ields the
/ossibilit% to /re/are the >owerimages inde/endentl% of the time
and location of the final de/lo%ment.The seed deli2er% s%stem
consists of fi2e dis/enser mod#les that can select a s/ecified
amo#ntof seeds from a seedbo;. 8ach mod#le is ada/table to the seed
form and sie thro#gh ane;changeable o/ening mechanism. More mod#les
can be added easil% to f#rther increase the/erformance. !n air
/ress#re based deli2er% shoots the seeds from the dis/enser mod#les
tothe e(ection s#bs%stem thro#gh a /lastic t#be. ! sensor s%stem
was added at the o#tlet todetect whether a seed has been /laced
correctl% or not in order to close the control loo/.The Cartesian
stage is assembled as an 1-config#ration with tooth-belted a;es and
electricalmotors o/erated at 3?DC. !s the mani/#lator onl% needs to
carr% the e(ection s#bs%stemand the deli2er% t#be the /ower demands
on the motors are relati2el% low. F#rther a controlsoftware and
#ser interface was written for both Microsoft 'indows and Lin#;.
For theLin#; software a node in the robot o/erating s%stem @R,SA
framewor) has been
im/lemented.The /erformance of the s%stem has been tested
e;tensi2el% for reliabilit% /recision andre/eatabilit% with seeds
of diferent sies and forms. It has been obser2ed that the n#mber
ofe(ected seeds 2aries onl% within the s/ecified tolerance.
Concerning the /recision there+#irements were also f#lfilledB 56 of
all seeds were /laced within one centimetre and74 were detected in
a radi#s of *.4cm from the reference /oint. F#rther the /erformance
ofthe e(ection sensor has also been e2al#ated. !ll seeds were
reliabl% detected es/eciall% forlarge seed sies or high n#mbers of
e(ected seeds.Finall% a conce/t for a mobile robot which can /lant
>ower images a#tonomo#sl% wasde2elo/ed. ! similar mani/#lator as
in the static sol#tion is intended to be #sed. Se2erallocomotion
and localiation conce/ts ha2e been e2al#ated and it is /ro/osed to
#se adiferential dri2e /latform combined with laser based
triang#la- tion. !s obser2ed in first
sim#lations the /recision of the /ose estimate co#ld be f#rther
increased b% adding acom/ass.
6ey7ords:Gardening Robotics Flower Images Seed Deli2er% S%stem
CartesianRobot !#tonomo#s Mobile Robot
iii
-
7/21/2019 Gardening Robot
6/92
i2
-
7/21/2019 Gardening Robot
7/92
Abstract
Das &iel dieser !rbeit ist die 8ntwic)l#ng eines
$e/>an#ngsroboters der $l#men- samen2erschiedener !rten in einem
2ordefinierten M#ster seten )ann. Dad#rchwird es erm ht ein
beliebig grosses $l#menbild # erstellen. 8in Mechanism#s oglicder
einelne Samen a#s einem $eh alter a#sw ahlen #nd # einem !#slass
trans-
/ortieren )ann w#rde da# entworfen. an#ng 2orbereiten # ) onnen
w#rde der Mechanis-m#s in einen E-Tisch integriert wobei die Samen
a#f eine wasserl he Folie 2on oslic(e einem #adratmeter Fl he
/latiert werden. Die Folie )ann danach a#f dem acFeld a#sgelegt #nd
bew assert werden.Das S%stem besteht a#s f Dis/enser-Mod#len die
(eweils eine bestimmte Menge #nfan Samen a#s einem $eh alter
a#sgeben. Die Mod#le ) onnen der Form #nd Gr osseder # />anenden
Samen ange/asst werden indem der ,fn#ngsmechanism#s a#s- gewechselt
wird. 'eitere Mod#le ) onnen leicht hin#gef werden #m die F#n)-
#gttionalit # erweitern. Die Samen werden d#rch ein L#ftdr#c)s%stem
2on den atDis/enser-Mod#len # einem !#slassmechanism#s bef ordert
wo ein Sensors%stemangebracht w#rde #m die )orre)te !#sgabe #
er/r
#b #fen #nd dad#rch den Regel-
)reis # schliessen.Der )artesische Roboter w#rde als 1-Portal
bestehend a#s &ahnriemenachsen #nd 3?Gleichstrommotoren
realisiert. Da die bewegte Masse n#r a#s dem !#slasss%s-tem #nd dem
f #hrschla#ch besteht sind die Leist#ngsanforder#ngen an die
Mo-toren relati2 gering. Ferner w#rde eine Ste#er#ngs-Software #nd
eine $en#ter-ober> he sowohl f Microsoft 'indows wie a#ch f
Lin#; /rogrammiert. Die
ac #r #rLin#;-Software w#rde als =ode im Robot ,/erating S%stem
@R,SA Framewor)im/lementiert.Die erl assig)eit Pr aision #nd
'iederholbar)eit des S%stems w#rde a#sgiebigmit Samen 2erschiedener
Gr ossen #nd Formen #nters#cht. Dabei eigte sich dassdie !nahl der
/latierten $l#mensamen n#r innerhalb der 2orgegebenen Toleran
2ariiert. Im $e#g a#f die Pr aision )onnten die !nforder#ngen
ebenfalls erf #lltwerdenB 56 aller Samen w#rden in einem anen )ann.
Der Mani/#lator a#s der statischen L os#ng)ann mit leichten ?er
ander#ngen ernommen werden. ?erschiedene Fortbewe- #bg#ngs- #nd
Lo)alisier#ngs)one/te w#rden e2al#iert #nd es wird 2orgeschlagen
einePlattform mit einem diferentiellen !ntrieb # 2erwenden. r
Lo)alisier#ng )ann Laser-Triang#lation in ?erbind#ng mit einem
Hom/ass #nd der ,dometrie einge-sett werden. 'ie erste Sim#lationen
eigten )ann dad#rch eine hohe Pr aisionerreicht werden.
Stich7orte:$e/>an#ngsroboter $l#menbilder E-Tisch !#tonomer
mobilerRoboter
2
-
7/21/2019 Gardening Robot
8/92
2i
-
7/21/2019 Gardening Robot
9/92
ist o! "igures
.* ?ac##m /robe . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . .5.Slider . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .7.0 Slider with
limited o/ening 2ol#me . . . . . . . . . . . . . . . . . . .9.3
Slider withlimited o/ening 2ol#me and control /ress#re t#be . . .
.
9.4 Seeddeli2er% mod#le for m#lti/le seed t%/es . . . . . . . .
. . . . . **.5 Rela% dri2er . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . *.6 Seed e(ection mechanism . . . . . . . .
. . . . . . . . . . . . . . . . . *0.7 8(ection sensor schematic .
. . . . . . . . . . . . . . . . . . . . . . . *3
0.* E-Table @,2er2iewA . . . . . . . . . . . . . . . . . . . . .
. . . . . *70. E-Table s%stem schematics . . . . . . . . . . . . .
. . . . . . . . . *90.0 Gra/hical #ser interface . . . . . . . . .
. . . . . . . . . . . . . . . . *0.3 Planting /rocess >owchart .
. . . . . . . . . . . . . . . . . . . . . . . 0
3.* Test set#/ . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 53. =#mber of e(ected seeds . . . . . . . . . . . .
. . . . . . . . . . . . . 63.0 Position of e(ected ?iola seeds . .
. . . . . . . . . . . . . . . . . . . . 73.3 Position of e(ected
Phlo; seeds . . . . . . . . . . . . . . . . . . . . . 73.4 Position
of e(ected Im/atiens seeds . . . . . . . . . . . . . . . . . . .
73.5 Position of e(ected seeds from all meas#rements . . . . . . .
. . . . . 93.6 PrecisionRecall of the e(ection sensor . . . . . . .
. . . . . . . . . . 0:
4.* Terrain constraints . . . . . . . . . . .. .. .. .. .. . . .
. . . . . 04. ,2er2iew of the mobile /latform . . .. .. .. .. .. .
. . . . . . . 094.0 R,S-=ode str#ct#re for the control of the
mani/#lator . . . . . . . . 34.3 Path /lanning . . . . . . . . . .
. . . .. ... .... . . . . . . . . . 30
-
7/21/2019 Gardening Robot
10/92
2ii
-
7/21/2019 Gardening Robot
11/92
2iii
-
7/21/2019 Gardening Robot
12/92
ist o! Tab#es
0.*
3.*
4.*4.4.0
S#bstrates . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . .
8(ection sensor /erformance . . . . . . . . . . . . . . . . . .
. . . . .
Localiation methods s#mmar% . . . . . . . . . . . . . . . . . .
. . . Re+#iredcom/onents . . . . . . . . . . . . . . . . . . . . .
. . . . . Position control algorithm/arameter descri/tion . . . . .
. . . . . .
*5
9
07093*
$.* Seeding test res#lts for Im/atiens Slider S . . . . . . . .
. . . . . . . 46$. Seeding test res#lts for ?iolas Slider S . . . .
. . . . . . . . . . . . . 49$.0 Seeding test res#lts for ?iolas
Slider M . . . . . . . . . . . . . . . . 5*$.3 Seeding test res#lts
for Phlo; Slider M . . . . . . . . . . . . . . . . 50$.4 Seeding
test res#lts for Phlo; Slider L . . . . . . . . . . . . . . . . .
54
i;
-
7/21/2019 Gardening Robot
13/92
;
-
7/21/2019 Gardening Robot
14/92
$re!ace
This MasterJs thesis concl#des o#r st#dies in Robotics S%stems
and Control at theSwiss Federal Instit#te of Technolog% in & h.
The /ro(ect is a coo/eration be- #rictween the !#tonomo#s S%stems
Lab @!SLA and Disne% Research & h @DR&A and #ricdeals with
the robotic creation of a large-scale >ower image. Growing
images are widel%
#sed as a decoration element of o#tdoor areas s#ch as cit%
gardens ro#nd- abo#ts aro#nd/#blic b#ildings as well as in
am#sement /ar)s. S#ch images are created man#all% and ha2etherefore
high labo#r costs and limited 2is#al efects. 'ith an a#tonomo#s
robot this cost canbe minimied and the image com/le;it% increased.
This a//lication has commercial /otentialfor o#tdoor ad2ertisements
and as an attraction for am#sement /ar) 2isitors.
D#e to the di2ersit% of challenges this has been a 2er%
interesting /ro(ect and wewish to than)
KProf. Dr. Roland Siegwart for gi2ing #s the o//ort#nit% to
cond#ct this /ro(ectat the !#tonomo#s S%stems Lab.
K,#r s#/er2isors Dr. C" edric Pradalier at !SL Dr. Pa#l
$eardsle% and Dr. 'o(-ciech Mat#si) at Disne% Research for their
s#//ort and the enco#raging dis- c#ssions.
K!ll other /eo/le directl% afliated with the /ro(ect for the
ins/iring disc#s-sions and the insight into their /artsB Dr. Dere)
$radle% Dr. Fran) Liebisch Dr.=orbert Hirchgessner and Dr. Robert
'ang.
KThe IT-s#//orters Stefan $ertschi and Thomas $a#mgartner for
their s#//ortin administrati2e IT-related and electronics-related
+#estions.
KThe mechanic technicians Mar)#s $ #hler and Dario Fenner for
the man#fac-t#ring of the mechanical /arts and s#//ort in related
+#estions.
K!ll members of !SL and DR& for their hel/ in +#estions
related to theirs/ecific fields of research.
K!nd last b#t not least o#r friends and families for their great
s#//ort andenco#ragement d#ring both this /ro(ect and the entire
st#dies.
Z urich, August 2011
Stefan Riesen and Linus Rohrer
;i
-
7/21/2019 Gardening Robot
15/92
;ii
-
7/21/2019 Gardening Robot
16/92
Chapter 1
%ntroduction
181 $ro9ect Goa#s and Reuirements
The o2erall goal of the Disne% Flower Images Pro(ect is to grow
a bed of >owers with thea//earance of a realistic image. Flower
images are alread% fo#nd in cit% /ar)s b#t the% arecreated man#all%
which is time-cons#ming and limits the 2is#al efects. $% a#tomating
the/rocess it is aimed to achie2e more so/histicated res#lts. This
thesis is foc#sed on therobotics com/onent of the /ro(ect and the
goal is to ma)e a seed-/lanting robot. Two2ariants of the robot are
to be de2elo/ed. The first is a stationar% robot which can /lant
seedsonto a tile of one s+#are meter. The second 2ariant is a f#ll%
a#tonomo#s mobile robot whichcan /lant directl% in an o#tdoor
setting with 2ariable field sies. $oth robots shall be able
tohandle a wide range of /lant seeds whereas diferent seeds can be
#sed sim#ltaneo#sl%. Thecreation of an o/timied >ower /attern
gi2en from an in/#t image was not in the foc#s ofthis thesis and is
considered to be a2ailable as an in/#t to the s%stem.
18181 rgani;ation
The /ro(ect is organied in three engineering stages. These are
not entirel% de/en-
dent on the res#lts of the /re2io#s stage and can therefore be
de2elo/ed conc#rrentl%.
Stage 1: 'eve#opment o! a Seed 'e#ivery System
In the first stage a seed deli2er% s%stem for the s/ecified seed
t%/es @See section *.*.A
is to be de2elo/ed. The mechanism shall be able to select a
defined amo#nt of seeds anddeli2er them to an o#tlet where the% are
/laced. The selection mechanism is re+#ired to bedesigned in wa%
that the seeds can be selected from m#lti/le seed t%/es either
diferentcolo#rs of the same s/ecies or diferent s/ecies. ! )e%
/oint is the reliabilit%B It is im/ortantthat the n#mber of seeds
selected and deli2ered does not ha2e a high 2ariance and that
thea2erage n#mber of seeds corres/onds to a /redefined n#mber. This
n#mber ma% 2ar%between s/ecies. The desired e(ection /recision is
that most seeds are in a range of*.4cmfrom the reference /oint. The
seed deli2er% mechanism has to be designed in a wa% to beo/erated
in one of thefollowing modesB
KM#lti/assB The robot /asses the field m#lti/le times with
another seed t%/eeach time. $etween the /asses it is re+#ired to
e;change or refill the seedbo;.
KSingle/assB The robot /asses the field onl% once seeding all
seed t%/es in this/ass. The mechanism selects the correct seed t%/e
from m#lti/le seedbo;es and /lacesit.
*
-
7/21/2019 Gardening Robot
17/92
Cha/ter *. Introd#ction
K1%bridB The robot /asses the field m#lti/le times with a set of
diferent seedt%/es each time. $etween the /asses the seedbo;es are
e;changed either man#all% ora#tomaticall%.
Stage 2: %mp#ementation o! the Seed 'e#ivery System on a
Stationary
2',Robot
In a second ste/ the seed deli2er% mechanism is mo#nted on a
static robot which
allows the /lanting of >ower images onto a s#bstrate. This
can either be a bo; of soil whichis then #sed for growing the
/lants in a greenho#se and then /laced onto the field.
!nalternati2e wo#ld be a bio-degradable s#bstrate which is laid o#t
on the field where the/lants are directl% grown. For sim/licit% the
tiles shall be as big as /ossible in order tored#ce the n#mber b#t
on the other hand for eas% handling of the tiles small tiles wo#ld
be/referred. Therefore the sie of one tile has been defined to one
s+#are meter as it is a goodcom/romise between handiness
trans/ortabilit% and a low n#mber of tiles.
Stage : %mp#ementation o! the Seed 'e#ivery System on an
Autonomous
$#at!orm
To allow the f#ll% a#tonomo#s creation of large-scale growing
>ower images an
a#tonomo#s mobile robot is to be de2elo/ed in the third stage.
The robot shall be e+#i//edwith a mani/#lator based on the seed
deli2er% s%stem de2elo/ed in the first stage. F#rther therobot has
to be able to localie itself with a s#itable algorithm and to /lan
the /ath on thefield a#tonomo#sl%. If for an% reason the achie2ed
/ositioning /recision of the robot is lessthan the re+#ired
/recision for /lanting the mani/#lator has to be designed in a wa%
that itcan com/ensate an% mis/lacements of the robot in order to
increase the /lanting /recision tothe desired le2el. This im/lies
that the localiation /recision is higher than the re+#ired/lanting
/recision.
18182 Seed properties
From a list of s/ecies that are considered s#itable for the
creation of growing images
the seeds ha2e been anal%ed. The% were classified according to
their form and sie.
KDahlia hybridsB Flat longish abo#t *;3mmKDorotheantus
bellidiformisB S/herical abo#t :.*mm in diameterKa!ania hybridsB
8lli/soid abo#t :.7;mmK"m#atiens $allerianaB 8lli/soid abo#t
:.4;:.7mmK%etunia hybridsB S/herical abo#t :.mm in diameter
K%hlo& drummondiiB 8lli/soid abo#t :.6;*mmK%ortulaca
grandifloraB S/herical abo#t :.0mm in diameterK'erbena hybridsB
8lli/soid abo#t :.4;.4mmK'iola $ittroc(ianaB =earl% s/herical abo#t
:.7mm in diameter. =oteB ?iolas
are biann#al and therefore onl% s#itable for the long-term
creation of >ower images.
From the list a s#bset of s/ecies with similar form and sie
class was selected to
s/ecif% the re+#irements on the robot in this stage b#t it has
also been defined that theselection mechanism shall be e;tendable
to other s/ecies. The selected s/ecies are
'iolas%hlo&and"m#atiens. These seeds ha2e their ro#ndish form
and their a//ro;imate sieof abo#t :.4-*mm in all directions in
common.
-
7/21/2019 Gardening Robot
18/92
*.. Related 'or) 0
182 Re#ated ower images no e;isting /latform can be #sed or
f#rther de2elo/edb#t a new one has to be designed from scratch.
18282 Seed 'e#ivery Systems
The a#tomatic deli2er% of seeds o#t of a seedbo; onto the gro#nd
has been de2elo/ed +#ite
earl% in ind#strial histor%. These s%stems distrib#te the seeds
in a /redefined area #singdr#ms drilling or digging de2ices b#t
none of these s%stems is #sed for /recise /lacement ofa single seed
to a defined /osition. !lso most of these s%stems deal with onl%
one seed t%/e.=e2ertheless in the last 0: %ears some attem/ts to
/ic) #/ a single seed ha2e been made.Ma#r% 6 /atented an a//arat#s
where the seeds are /laced on a rotating dis) and then areshot with
air /ress#re into the gro#nd when their /osition on the dis) /asses
the o#t/#t2al2e. Similarl% a(i et al. *3 first #se a negati2e air
/ress#re to /ic) a seed o#t of aseedbo; mo2e it to the o#tlet
/osition and then a//l% a /ositi2e air /ress#re to shoot the
seedinto the gro#nd.
Heller et al. f#rther de2elo/ed this /rinci/le in 5 where the
seeds are /ic)ed #/
b% a /recise 2ac##m /robe and let them fall b% in2erting the
/ress#re. Their robot is not #sedto /lant seeds b#t to transfer
seeds from one seedbo; to another. ! diferent a//roach to
/ic) #/ a single seed is #sed b% Ton#s 9. In his /atent a needle
mo2es from the gro#nd of aseedbo; to its to/. The ti/ is designed
in a wa% that onl% one seed remains on it. !fterreaching the to/ of
the seedbo; the ti/ enters a small t#be from where the seed on the
ti/ istrans/orted to the o#tlet #sing air /ress#re.
For the a//lication of this /ro(ect there is no read%-to-#se
sol#tion a2ailable b#t
se2eral sol#tions that can be #sed as a base to design a
mechanism. 8s/eciall% this a//lies tothe 2ac##m /robe and to the
mechanical selection combined with an air /ress#re baseddeli2er%
s%stem. Those two a//roaches seem to be most /romising as a
starting /oint sincethe% allow /recise selection and /lanting of
single seeds. For the re#se of the 2ac##m s%stemlegal iss#es ha2e
to be ta)en into consideration.
-
7/21/2019 Gardening Robot
19/92
3 Cha/ter *. Introd#ction
1828 Creation o! "#o7er %mages
The creation of >ower images as #sed for decoration of
gardens or /ar)s andor for
ad2ertising /#r/oses is still a man#al o/eration. Trebbin et al.
*: ** ha2e started researchin this direction. The% #se the
following two diferent a//roaches. The first is to /lant theseeds
which form the image directl% at the corres/onding locations. The%
intended to #se adrilling machine that is mo2ed b% a tractor
na2igated b% the global /ositioning s%stem GPS.!s the GPS has a
localiation /recision of abo#t .4m it is ass#med that a GPS located
andman#all% dri2en tractor wo#ld not reach the desired /lanting
/recision th#s not leading to asatisf%ing >ower image.
!dditional sensors for an acc#rate /ose estimation and
ana#tomaticall% dri2en 2ehicle as intended to be de2elo/ed in the
third /ro(ect stage @Seesection *.*.*A are e;/ected to gi2e a
significantl% better res#lt.The second a//roach is to /rint the
seeds on a s#bstrate made of /ol%-2in%l-alcohol similarto the
/atent b% 'ir *0. The s#bstrate is then laid on the gro#nd and
co2ered with soil.$% watering the s#bstrate it dissol2es and the
seeds remain in their location. This seems tobe a considerable
alternati2e to /lanting on soil tiles for the second de2elo/ment
stage @See
section *.*.*A. ! s#bstrate is lighter than a bo; of soil and is
therefore easier to handle.F#rther the tiles can be /re/ared
inde/endent of time and location of the final de/lo%mentand can be
stored #ntil needed.!s Trebbin et al. *: ** ha2e withdrawn their
/atent a//lication for the first a//roach it isass#med that the%
foc#s on the second a//roach. =either is /#blished how the% create
ano/timal >owering /attern o#t of the image to get the best
sol#tion.
-
7/21/2019 Gardening Robot
20/92
Chapter 2
Seed 'e#ivery System
"deas ho$ to handle a small number of seeds are discussed in
thischa#ter $hereby the tas( is di)ided into the three
sub#roblems
Selection, Deli)ery and %lacement. *ased on this discussion, a
solution
that includes a seedbo& $ith a controllable do$n$ard o#ening
and an
air #ressure based deli)ery is #resented. +inally, some
theoretical
thoughts of #ossible im#ro)ements are listed.
281 3asic $rincip#es
This section describes the /ossible /h%sical efects that are
considered to be #sef#l for theseed deli2er% s%stem. It is
disting#ished between the tas)s Selection Deli2er% and
Placement.
Princi/les were de2elo/ed for each tas) se/aratel% and then
merged into the conce/tdescribed in section . below.
28181 Se#ection $rincip#e
In the selection tas) the robot or /arts of it m#st be able to
select a s/ecified n#mber of adefined seed s/ecies o#t of a bo; and
hand the seeds o2er to the s#bs%stem which /erformsthe deli2er%
tas). This can be achie2ed b% the /rinci/les described below.
4acuum
!s ill#strated in fig .* a seed is /ic)ed #/ b% a /robe which
can create a negati2e air/ress#re at its ti/. ?ac##m is widel% #sed
for /ic)-and-/lace o/erations of ob(ects in 2ario#ssie classes. To
select diferent seeds from m#lti/le bo;es the /robe mo2ement needs
onl% tobe /rogrammed according to the /ositions of the bo;es. To
hand the /ic)ed #/ seed o2er toa deli2er% mechanism a /ositi2e air
/ress#re is created at the /robe to blow the seed awa%onto the
deli2er% mechanism or directl% onto the /lacement /osition. This
method is/atented b% Heller et al. 5 for the handling of seeds.
!d2antages are that an% sie and formclass can be handled as well as
the n#mber of seeds is ad(#stable b% a change of the ti/ sie.!
ma(or drawbac) is the need for an additional a;is as the ti/ is
re+#ired to mo2e 2erticall%for reliable /ic) #/ when the n#mber of
seeds in the bo; changes. F#rther - if combined withdirect deli2er%
- the /lanting time is significantl% increased since the /robe has
to co2er thedistance from the /ic)-#/ to the /lanting /osition for
each seeding /oint.
4
-
7/21/2019 Gardening Robot
21/92
5 Cha/ter . Seed Deli2er% S%stem
/ic)ed-#/ seed
Seedbo;
Fig#re .*B ?ac##m /robe
Gravity
'hen gra2it% shall be #sed as a selection /rinci/le the seedbo;
needs to ha2e a controllabledownward o/ening. This can be achie2ed
with an electromagnet a motor or a /ne#matics%stem that mani/#lates
the o/ening mechanism. The sim/licit% of this conce/t is a
bigad2antage which leads to lower design efort and /rod#ction
costs. Disad2antages are the factthat an% mo2ing /arts can be
bloc)ed b% seeds and that the n#mber of selected seeds is
onl%defined b% a statistical /rocess. M#lti/le seed t%/es can be
easil% combined b% adding amod#le for each s/ecies. 8ach selection
mechanism can be tailored to the s/ecific /ro/ertiesof the
corres/onding seed.
>#ectrostatic 4a#ve
It has been obser2ed that the seeds stic) to electrostaticall%
charged s#rfaces. This co#ld be#sed in combination with a /robe
that has a controllable electrostaticall% chargeable s#rfaceat its
ti/. 8lectrostatics ha2e alread% been #sed b% $alachandran et al. 0
in order to controlthe >ow of agric#lt#ral seeds in b#l)
trans/ortation. This co#ld be ada/ted to single seedsb#t wo#ld
re+#ire f#ndamental research on the electrostatic /ro/erties of
diferent seeds.
.echanica# $ic,?p
et another method wo#ld be to /ic) #/ seeds with a mechanical
de2ice as a gri//er. Similarto the 2ac##m /rinci/le this also
re+#ires a third a;is for /ic)-#/ and /lacement. !ltho#gh
it is 2er% >e;ible for diferent seed t%/es and sies a gri//er
re+#ires a 2er% /recisemechanical design in order to handle the
f#ll 2ariation of diferent seeds witho#t destro%ingthem. F#rther a
com/le; control str#ct#re is needed which is closel% tied to the
mechanical/ro/erties and that can also s#r2e% the selected amo#nt
of seeds.
28182 'e#ivery $rincip#es
In the deli2er% tas) the corres/onding /arts ha2e to deli2er the
selected seeds to the/lacement mechanism. The following /rinci/les
show /ossible sol#tions that can accom/lishthis /roced#re.
?ac##m/robe
-
7/21/2019 Gardening Robot
22/92
.*. $asic Princi/les 6
'irect 'e#ivery
The selection mechanism is located directl% on the mani/#lator
of the /lacement
mechanism. In combination with a 2ac##m /robe or a mechanical
gri//er this means thatthe /robe is able to mo2e to an% /osition
where a seed sho#ld be /laced. In the case of anelectrostatic 2al2e
or a gra2it%-based selection mechanism the seedbo;es wo#ld also
need tobe /laced on the mani/#lator. This limits the n#mber of
seedbo;es that can be carried andthe mo2ing mass wo#ld be
increased.
Air $ressure
The idea is that the selection s#bs%stem /ic)s #/ the seed and
/laces it into a
t#be. Then air /ress#re is a//lied and the seeds are shot to the
/lacement de2ice. This has thead2antage that the seedbo;es do not
ha2e to be /laced on the mo2ing mani/#lator th#sred#cing the mo2ing
mass and the energ% cons#m/tion. !nother ad2antage is that
additionalseedbo;es e2ent#all% based on a diferent selection
/rinci/le can be added to the s%stem
easil% b% e;tending the t#be.
2818 $#acement $rincip#es
This s#bs%stem has to /lace the seeds at the s/ecified /osition.
The #sage of the
/rinci/le de/ends also on the seed t%/e which can either be
re+#ired to lie on the gro#nd tobe slightl% co2ered with soil or to
be #nder gro#nd in order to germinate. F#rther it isreasonable to
add a sensor which detects whether a seed has been /laced correctl%
or not.
Gravity
Gra2it% wo#ld be the sim/lest /ro/osition as it does not re+#ire
a com/le; mech-
anism b#t it is onl% s#itable for seeds that are to be l%ing on
gro#nd. For seeds that need to
be co2ered with soil the co2erage co#ld be a//lied man#all% or
with another mani/#lator ina second ste/.
'ri##ing
!n ob2io#s wa% to bring a seed #nder gro#nd is to drill a hole
with a borer or
to stri)e a hole with a rod. In both sol#tions the seed wo#ld
then be dro//ed se/aratel% intothis ga/. It is re+#ired to ens#re
that the hole does not fall together before the seed is
/laced.Possibl% the bore has to be closed again after the /lanting
of the seed. 1ence the mechanicalstr#ct#re of the mani/#lator has
to be e;tended.
Air $ressure
The air /ress#re - e.g. from an air /ress#re based deli2er% -
can be #sed to create alittle hole in which the seed is shot into.
This re+#ires a strong air /ress#re so#rce and mightfail if the
gro#nd is too hard @e.g. d#e to stonesA. !nother ris) wo#ld be that
seeds alread%/laced nearb% co#ld be dis/laced b% the /ress#re
e;ha#st or b% material being blown awa%.
-
7/21/2019 Gardening Robot
23/92
7 Cha/ter . Seed Deli2er% S%stem
282 Concept
!s a basic conce/t a combination of the following /rinci/les was
chosenB
KSelect a seed #sing gra2it% thro#gh a controllable downward
o/ening in theseedbo;
KDeli2er the seed to the e(ection /ort b% a//l%ing air
/ress#reK8(ect the seed directl% onto the gro#nd and detect falling
seeds
The main reason for choosing these /rinci/les is their
sim/licit% and cost-efecti2e-
ness. ! f#rther ad2antage of the gra2it% based selection the
e;tendabilit% of the s%stem wasanother reason for this selection.
The sim/licit% of the air /ress#re based deli2er% lies in thefact
that it eliminates the need for a third a;is and lowers the mo2ing
mass since onl% asingle t#be has to be carried.
28281 Seed Se#ection .echanismThis basic conce/t for the
selection mechanism @i.e. the controllable o/eningA was
de2elo/ed and refined in three engineering iterations starting
with a 2er% sim/le mechanismin the first iteration and correcting
drawbac)s in the s#bse+#ent ste/s. F#rther the e(ectionwas ada/ted
to red#ce the drawbac)s gi2en b% the air /ress#re deli2er%
s%stem.
Simp#e S#ider
The first a//roach is a sim/le slider o/ening mechanism as shown
in fig. .. 'hen
the slider is o/ened a small b#t not e;actl% defined n#mber of
seeds fall o#t of the seedbo;into the g#ide. Then the slider is
mo2ed forwards th#s /#shing the seeds into the deli2er%t#be and
closing the o/ening. ! first hand-made f#nctional /rotot%/e ga2e
good res#lts b#tthen the /recisel% man#fact#red /rotot%/e showed
the critical /oint that the n#mber of seedsis not reall% limited.
This ga2e a high 2ariance in the n#mber of e(ected seeds which was
notdesired.
S#ider 7ith imited pening
$ased on the e;/erimental res#lts of the first iteration the
o/ening 2ol#me was
limited in the second draft as shown in fig. .0. The limitation
of the o/ening 2ol#meres#lted in a significantl% lower 2ariance in
the n#mber of seeds that are selected. Thecorres/onding /rotot%/e
was not man#fact#red as its /arts wo#ld ha2e been too
com/licatedre+#iring the milling of 2er% small com/onents which
wo#ld be feasible b#t com/licatedand costl%.
Seedbo;
!ir Press#re T#be
Slider
#N#: #N#ma&
Fig#re .B Slider
-
7/21/2019 Gardening Robot
24/92
.. Conce/t 9
Seedbo;
!ir Press#re T#be
Slider
#N#: #N#ma&
Fig#re .0B Slider with limited o/ening 2ol#me
Seedbo;
Control Press#re #N#maN#:
Slider
Deli2er% T#be
#N#: #N#ma&
Fig#re .3B Slider with limited o/ening 2ol#me and control
/ress#re t#be
>&tended S#ider
The e;tended slider mechanism as shown in fig .3 is the final
design. In contrast to thesol#tion abo2e it has a 2ertical bore
which allows eas% man#fact#ring. The bore is a critical/oint as the
seeds ma% get st#c) in it. ,//osed to the second sol#tion the
o/ening cannot becleaned b% the deli2er% /ress#re as the bore a;is
is across the direction of /ress#re. Thereforea se/arate control
/ress#re t#be is added which allows the slider to be cleaned before
thedeli2er% /ress#re is a//lied. F#rther it is easil% ada/table to
diferent seed sies as the hole
sie of the e;changeable slider can be man#fact#red with diferent
diameters.
28282 >9ection .echanism
The seeds are e(ected thro#gh a 2erticall% fi;ed t#be. In this
t#be small holes to red#ce theair /ress#re are integrated in order
to slow the seeds down before being /laced on thegro#nd. !fter
first tests it has been obser2ed that this is not s#fcient.
Therefore a bloc)ingmechanism is added which sto/s the seeds
com/letel% and e(ects them after the air /ress#rehas been red#ced.
F#rther a light barrier s%stem is mo#nted at the e(ection /oint.
This sensorcan detect whether a seed has been /laced or not to
close the control loo/.
-
7/21/2019 Gardening Robot
25/92
*: Cha/ter . Seed Deli2er% S%stem
28 >ngineering
2881 Se#ection .echanism
.echanica# 'esign
!fter the conce/t has been de2elo/ed the definiti2e design of
the selection mech-
anism has been engineered as ill#strated in fig. .4. Since it is
e;/ected that a growingimage can be created with fo#r to fi2e t%/es
of diferentl% colo#red >owers there are fi2eidentical mod#les
integrated into the s%stem. The main element is the gro#nd /late
consistingof an #//er and a lower /art containing both the deli2er%
t#be and the control t#be as well asthe g#idances for the sliders
of all fi2e mod- #les. The sliders were man#fact#red with
threediferent hole sies with diameters of mm 0mm and 3mm to be
easil% e;changed accordingto the seed t%/e #sed in the
corres/onding seedbo; and the desired n#mber of seeds to bee(ected.
!ll /arts ha2e been fabricated #sing a 0D-/rinter.To close the
seedbo;es a co2er and a lower clos#re ha2e been designed. The
co2er
is re+#ired as there is /ress#re going from the control t#be
into the seedbo;. This mi;es theseeds #/ and lowers the /robabilit%
of a seed getting st#c). The onl% drawbac) is that seedsmight get
blown o#t of the bo; if no co2er is #sed. ! lower clos#re is #sed
for e;changing anon-em/t% seedbo;. If the o/erator wants to
e;change a seedbo; the lower clos#re can beclosed man#all% and the
seedbo; can be dismo#nted from the gro#nd /late.For the slider
mo2ement act#ation monostable electromagnets of the t%/e Tremba1M!
5.::* o/erated at 3?DC are #sed. These magnets /#ll the le2er in
when/ositi2e 2oltage is a//lied. ,nce it is in its retracted
/osition it is held there b% a /ermanentmagnet. If a negati2e
2oltage is a//lied the le2er is released and shifted o#t b% the
s/ring #/to an e;ternal mechanical bloc)ing de2ice. These magnets
ha2e a nominal shifting distance of*0mm b#t onl% abo#t 7mm are #sed
in the selection mechanism as the retracting forcedecreases
dramaticall% with increasing shift. The mo2ement range is
determined b% the slider
reaching the end of the g#idance in the gro#nd /late.
>#ectronica# 'esign
For controlling the electromagnets and /ress#re 2al2es an
!rd#ino Mega 45: Mi-
crocontroller with a c#stom b#ilt dri2er board is #sed. To
/ro2ide the needed 2olt- ages forthe electromagnets d/dt @do#ble
/ole do#ble throwA rela%s were selected. Logic-M,SF8TJsresistors
and diodes are needed for controlling and switching the rela%s.
8ach slidermechanism of the seed selection s%stem re+#ires its own
mod#le of the abo2e describedelements. ,ne mod#le of the dri2er
board can be fo#nd in fig. .5. F#rther the control of theair
/ress#re 2al2es and the o/tional 2ibrating motor intended for the
/re2ention of slider(amming are also integrated into the dri2er
board.
2882 >9ection
.echanica# 'esign
First e;/erimental res#lts showed that the direct e(ection from
the deli2er% t#be
onto the s#rface is not 2er% /recise. If the ga/ between the
t#be and the s#rface is too highthe e(ected seeds get blown of b%
the /ress#re e;ha#st. ,n the other hand if the ga/ is toosmall the
robot cannot mo2e #nhindered and is li)el% to dislocate alread%
/laced seeds.Therefore the mechanism ill#strated in fig. .6 was
designed to slow down the seeds at thee(ection. In this mechanism
the e(ection t#be is
-
7/21/2019 Gardening Robot
26/92
.0. 8ngineering **
Co2er
Seedbo;Clos#re
8lectromagnet
Control T#be
Slider
-
7/21/2019 Gardening Robot
27/92
* Cha/ter . Seed Deli2er% S%stem
Fig#re .5B Rela% dri2er
-
7/21/2019 Gardening Robot
28/92
.0. 8ngineering *0
From Deli2er% T#be
!ir Press#reRed#ction 1oles
8lectromagnet
$loc)er
8(ection Sensor Light $arriers
Seed 8(ection
Fig#re .6B Seed e(ection mechanism
-
7/21/2019 Gardening Robot
29/92
*3 Cha/ter . Seed Deli2er% S%stem
Fig#re .7B 8(ection sensor schematic
28- >&tendabi#ity and $ossib#e %mprovements
28-81 .ore Seed Types
The seed deli2er% s%stem is e;tendable to more seed t%/es than
in the c#rrent stage.
The latest selection mechanism alread% ofers the /ossibilit% to
be ada/ted to seed t%/es of adiferent sie class. If for an% reason
a desired seed t%/e does not com/l% with the slidermechanism b#t
re+#ires another selection /rinci/le an additional handling
mechanism can
be designed and added to the s%stem b% attaching it in series
with the c#rrent design to thedeli2er% t#be. Therefore the
commonalit% of the two mechanisms wo#ld be the deli2er%thro#gh air
/ress#re.
28-82 Sensors on the S#iders
! f#rther im/ro2ement co#ld be the addition of sensors at the
end of the electro-
magnets to determine whether the single sliders reach their end
/ositions or not. This wo#ldma)e s#re that the seeds in the
seedbo;es ha2e the highest /robabilit% to fall into the hole ofthe
slider mechanism and get blown of to the o#tlet. Se2eral tests
showed that if the slidersreached their end /ositions a seed gets
/lanted with a 2er% high /robabilit%.
-
7/21/2019 Gardening Robot
30/92
Chapter
*+,Tab#e !or Ti#ing
A )ariety of #ossible #lanting conce#ts has been discussed. he
usageof a $ater soluble foil and s#ray glue is #ro#osed to create a
tiled
gro$ingflo$er image. +urther the mechanical engineering of a
static
#lanting mechanism that integrates the seed deli)ery system
de)elo#ed in the #re)ious cha#ter is #resented. he design of
a
corres#onding electronical system and a control soft$are
com#letes
this cha#ter.
81 Concept
! static robot is to be b#ilt which /lants fi2e diferent )inds
of seeds onto a s#bstrate selectedbelow #sing the seed deli2er%
s%stem /ro/osed in the /re2io#s cha/ter. The s#bstrate is
/laced #nderneath the mani/#lator of the E-Table. If the chosen
s#b- strate re+#iresadditional adhesion a small amo#nt of
dissol2ing and bio-degradable gl#e is a//lied to/re2ent the
dis/lacement of the seeds. Finall% a thin la%er of soil or a second
sheet ofs#bstrate is /laced on to/ of the seeds to allow
trans/ortation and storage.
8181 Substrate
In table 0.* a set of diferent /ossible materials s#ch as P?!*
organic nonwo2en
fabric /a/er or soil is disc#ssed. The trade-of between handling
sim/licit% cost efecti2enessand ecological com/atibilit% leaded to
the selection of the P?! foil a2ailable in small+#antities at *6.
Its ma(or ad2antages are the eas% handling and the good water
sol#bilit%.F#rther it is chea/er than the nonwo2en fabric and
biologicall% more com/atible than the/a/er sol#tion. The limitation
on the a//licable gl#e t%/es is insignificant as there e;ist2ario#s
adhesi2es s#itable for P?!. Direct a//lication on soil was
discarded d#e to its hea2%weight and the difc#lties for storage
witho#t germinating seeds.
8182 G#ue
De/ending on the s#bstrate diferent gl#e t%/es wo#ld be
/ossible. The most im-
/ortant criteria areB
K$io-degradabilit%
K1armlessness to the seeds*Pol%2in%lalcohol
Prod#ct nameB Sol2% from S#l)% G #termann. This /rod#ct is
commonl% #sed as a stabilier for +#iltinga//lications.
*4
-
7/21/2019 Gardening Robot
31/92
*5 Cha/ter 0. E-Table for Tiling
.ethodSoi#
$4A !oi#
owers aregrown
- =o materials thatco#ld harm the en2i-ronment
- 'ater sol#ble
- ?er% light and th#seas% to trans/ort andstore
- Possibilit% for /rintingendless sheets if the foilis /ro2ided
on aroll
- =o remaining /arts inthe gro#nd
- 'ater sol#ble
'isadvantages
- =eeds a frame to holdthe soil together
- 1ea2%- Difc#lt for trans-
/ortation and storage
- Limited gl#e t%/es @no
water based gl#es a/-/licableA
- Costl% for small +#an-tities
n
on7oven!abric
@ organic eece
$aper
- ?er% light and th#s
eas% to trans/ort andstore
- Possibilit% for /rintingendless sheets if the foilis /ro2ided
on aroll
- =o remaining /arts inthe gro#nd
- Stronger than the P?!foil
- 8as% to trans/ort and
store- Possibilit% for /rinting
endless sheets if the/a/er is /ro2ided on aroll
- Se2eral gl#e t%/es a/-/licable
Table 0.*B S#bstrates
- Limited gl#e t%/es @no
water based gl#es a/-/licableA
- Dissol2es slower thanthe P?! foil
- ?er% e;/ensi2e
- =eeds more time todissol2e
- Lea2es chemicals onthe gro#nd
- Seeds m#st be more ro-b#st to grow thro#ghthe sheets
- Possibl% not entirel%bio-degradable
-
7/21/2019 Gardening Robot
32/92
0.. 8ngineering *6
K'ater sol#bilit%
KSim/le a//lication
KFi;ing the seed /osition
Some ideas areB 'ater sol#ble gl#e s/ra% corn-starch-water-mi;
corn-starch-oli2e oil-mi;egg white hairs/ra% etc. !n im/ortant
/oint is that the gl#e dissol2es in water s#ch that theseeds are
not enclosed in a gl#e shell and the germination is s#//ressed
therefore. !lso thereshall not remain to;ic de/osit that
contaminates the soil. !s /ro/osed in *: corn-starchwo#ld be a good
sol#tion.
D#ring e;/erimental /hases it t#rned o#t that the o/timal ratio
between waterand starch is hard to find. Too m#ch water means
easier a//lication b#t dissol2ing s#bstrateand red#ced adhesion.
More starch leads to difc#lties d#ring a//lication. !lso the
waterbased gl#e seems not to be o/timal for storing sheets since it
dissol2es the P?! foil o2er time.
!n alternati2e co#ld be to re/lace the water b% oil since it
does not attac) the s#bstrate b#thas a red#ced adhesi2eness witho#t
additional ingredients. F#rther mo#ld formation hasbeen obser2ed
that ma% harm or s#//ress the germination of the seeds.
Therefore the water sol#ble gl#e s/ra%0was selected since it
meets all the demandsand is readil% a2ailable at *6. This gl#e is
es/eciall% made for the a//lication with the P?!foil hence it
o2ercomes the drawbac) of earl% dissol2ing of the s#bstrate and has
the same/ro/erties as the s#bstrate itself. For f#rther
im/ro2ements of the /lanting robot it wo#ld be/ossible to a//l% the
gl#e a#tomaticall% b% the mani/#lator in order to increase the
le2el ofa#tomation and sim/lif% the /lanting /rocess.
82 >ngineering
8281 .echanica# 'esign
!n o2er2iew of the /latform is gi2en in fig. 0.*. The static
robot shall be able to
/lant seeds on a +#adratic area of *m. There are se2eral
standard robot config- #rations toachie2e s#ch a tas)B SC!R! delta
or Cartesian mani/#lators wo#ld all fit the re+#irements.For
sim/licit% a Cartesian robot in an 1-config#ration was chosen. The
1-config#rationofers more stabilit% than other Cartesian set#/s and
can be b#ilt of relati2el% chea/ standardelements.
Actuation
For the act#ated a;es linear tooth-belted rails of the t%/e
IG
-
7/21/2019 Gardening Robot
33/92
*7 Cha/ter 0. E-Table for Tiling
E-!;is connection
ting!r
ea
8(ection
-!;is
E-Motor
Plan nd E-!;is
Limit Switches @A
-Motor
*st E-!;is
Limit Switches @EA Seed Dis/ensers
Fig#re 0.*B E-Table @,2er2iewA
$neumatic System
The /ne#matic s%stem consists of a /ress#re red#ction de2ice two
electromagne-
ticall% controllable 2al2es and a /ress#re distrib#tor. The
2al2es are o/erated at 3?DC andare controlled b% the !rd#ino Mega
microcontroller. The /ress#re red#ction de2ice allowsthe reg#lation
of the s%stem /ress#re in order to ada/t for diferent seed
/ro/erties. ! t#be thatcan be attached to an% /ress#re so#rce with
a standard air /ress#re connector is #sed as thein/#t to the
/ne#matic s%stem. Th#s the s%stem can be re#sed on the mobile
/latform with anair /ress#re cartridge. !ll com/onents are from
Festo and were dismo#nted from an #n#sed/ro(ect.
Structure
The str#ct#re is based on Item al#mini#m /rofiles of the sie
class 5. There are
two /arallel longer /rofiles that com/ose the base str#ct#re for
the shorter /rofiles mo#nted
across. ,n the first two crossing /rofiles the E-a;es as well as
the limit switches are attached#sing a s/eciall% designed mo#nting
str#ct#re. The -a;is is connected to the sliding carriageof the
E-a;es b% an intermediate /late on which also a second /air of
limit switches ismo#nted. ,n the -!;is no s#//orting str#ct#re is
#sed. $etween the a;es a wooden /late isinstalled as a s#rface for
the /lacement of the s#bstrate. The remaining crossing /rofiles
ser2eas a mo#nting str#ct#re for the seed dis/ensers and all other
a#;iliaries. =o connections ha2ebeen considered critical so no
calc#lations were cond#cted for the described design. !llmechanical
/arts ha2e been designed in accordance with the ind#strial
standards as defined in*.
8282 >#ectronic System
The electronic s%stem of the E-Table is ill#strated in 0.. The
s%stem integrates
the motors the corres/onding controllers and its a#;iliaries
li)e the limit switches as well asall c#stom made electronics as
described in section .0. The s%stem has two DC /ower lin)sone at
4?DC and one at 3?DC coming from an e;ternal so#rce. !ll
electronics #nlessre+#ired otherwise b% the f#nctionalit% are
/laced in a row besides the /lanting area.
-
7/21/2019 Gardening Robot
34/92
0.. 8ngineering *9
8mergenc% Sto/
-
7/21/2019 Gardening Robot
35/92
: Cha/ter 0. E-Table for Tiling
.otors and Contro##er
The linear a;es are dri2en b% a Ma;on R80: 5:' DC motor each. To
/ro2ide
the needed tor+#e and /recision the two motors were s#//lied
with /lanetar% gear heads@0B* red#ctionA. This gi2es a ma;im#m
tor+#e of 74m=m0 N *.944=m and a nominals/eed of 74::r/m/0 N
059.46r/m. Combined with the transmission ratio of the a;es
of55mm/t#rn this %ields a nominal linear s/eed of :.3*m/s. F#rther
the motors are e+#i//edwith MR encoders with *:3 co#nts /er t#rn.
Since the motor controllers #se +#adco#nts@+cA this f#rther
increase the resol#tion b% a factor of fo#r. Th#s leading to a
/ositioningresol#tion as calc#lated in form#la 0.* which is - e2en
combined with the /recision of thea;es themsel2es of:.04mm -
significantl% higher than re+#ired as the /lants cannot bee;/ected
to grow /erfectl% 2ertical. Therefore no linear /osition sensors
are needed.
55mm t#rn
3
+
c
*
:
3
t
#
r
n
I
n
c
0red*
N 6.::5*:3mmInc
@0.*A
The motors are each controlled b% a Ma;on 8P,S 34 /osition
controller andare e+#i//ed with se2eral safet% elementsB $oth a;es
are limited in the mo2ement b% anind#cti2e limit switch at each
end. For the limit switches ind#cti2e sensors of the t%/e'englor
I1::$H3*?D were integrated into the s%stem. These sensors o/erate
at 3?DCand ha2e a normall% closed beha2io#r. This ens#res that the
mo2ement is also bloc)ed if a/ower fail#re occ#rs on the sensor
circ#it. !s an additional safet% element an emergenc%sto/ b#tton
was added which immediatel% s#//resses all mo2ements.
8 So!t7are
! gra/hical #ser interface @Gower distance or /ict#re and
colo#r
selection. To control the electromagnets and the 2al2es as well
as to read the e(ection sensordata a scri/t in the !rd#ino al/ha
en2ironment an ID8 coming with the !rd#ino Mega45: microcontroller
was written. The /rogramming lang#age of this ID8 is based on
COO.
881 Graphica# ?ser %nter!ace
In fig#re 0.0 the gra/hical #ser interface @G
-
7/21/2019 Gardening Robot
36/92
into three /arts. ,n the left hand side the most im/ortant
b#ttons for controlling thea//lication and the seeding /rocess are
a2ailable. In the main window on the to/ right/osition the selected
/ict#re is dis/la%ed. $eneath an image of the act#al /lanting
/ict#recan be /re2iewed s#ch that the settings li)e >ower
distance and field sie might be ad(#stedbefore /lanting. !lso it is
/ossible to add or delete single seeds of the final /ict#re
b%clic)ing into the /ict#rebo; and selecting the desired colo#r
from the colo#r bar at the
bottom.If the o/en b#tton is clic)ed an o/en file dialog
a//ears. The software acce/ts all commonimage formats and dis/la%s
them in the #//er /ict#rebo;. 'hile o/ening the file it is
/arsedinto a /i;el-arra% according to the /redefined settings
selected in the /anel on the left. Th#sthe o/en file dialog also
acce/ts t;t-files with thefollowing content which is alread% in the
format of the /i;el-arra%B
E-Position @mmA -Position @mmA !RG$-Colo#r-?al#e E-Position @mmA
-Position @mmA !RG$-Colo#r-?al#e
-
7/21/2019 Gardening Robot
37/92
0.0. Software *
Fig#re 0.0B Gra/hical #ser interface
F#rther the #ser interface can read dat-files that list one
/lanting /oint /er line in the formX;Y;T whereXandYare the /osition
in millimetres andTis the seedbo;inde; @*-4A. The file ma% also
contain comment lines starting with a#. Thesecomments are dis/la%ed
when loading the file and are intended to instr#ct the #serwhich
seeds to fill into the bo;es.
882 Arduino .icrocontro##er
!s written abo2e the !rd#ino microcontroller can be easil%
/rogrammed in the
SDH !rd#ino al/ha. !t start#/ of the !rd#ino the initialiation
ro#tine starts and defineswhich /ins are #sed for o#t/#t or in/#t.
The start#/ /roced#re also initialies the interr#/ts#sed to read
the e(ection sensor data. Thereafter a /olling algorithm begins to
monitor theserial interface for incoming instr#ctions.
88 $#anting $rocess
!s ill#strated in fig. 0.3 the /lanting /rocess consists of two
/arallel tas)s. The
G
-
7/21/2019 Gardening Robot
38/92
Cha/ter 0. E-Table for Tiling
the goal /osition the !rd#ino tas) selects the seed and o/ens
the 2al2es to deli2er it to thee(ection /ort. ,nce the /osition has
been reached the !rd#ino o/ens the e(ection and readsthe sensor
data. If a seed has been detected the /lanting was s#ccessf#l and
the Gower images with a reasonableresol#tion.
3:::r/m55 mm m
0
red*
K5:sec t#rn N :.*9* sec @0.A
m.5sec:.*9* sec N :.396m @0.0A
The o2erall /lanting time is com/osed of the time needed to
establish the magnetic
field of the slider act#ators and the electromagnetic 2al2es.
F#rther the rela% ma% not beswitched too soon after the /ower has
been t#rned of b% the M,SF8T as the ind#cti2ec#rrents of the
magnets need to be dissi/ated b% the >%bac) diode first in order
not to damage
the electronics and to a2oid feedbac) co#/ling. ,ther dela%s
come from the time to reliabl%shoot the seeds from the dis/enser to
the e(ection b% the air /ress#re and from the e(ectionmechanism
itself. The latter incl#des the o/ening of the e(ection /ort and
the detection of theseeds b% the sensor s%stem. !ss#ming a tile of
a h#ndred seeding /oints @*:cm s/acingA the/rocess to /lant a
s+#are meter ta)es a//ro;imatel% se2en min#tes when no fail#re on
thes%stem occ#rred. Related to a growing time of abo#t three months
this /lanting time isinsignificant.
-
7/21/2019 Gardening Robot
39/92
0.0. Software 0
Position and SeedT%/e In/#t
8P,S
PositionController
Motors
!rd#ino
,/en Slider
,/en ?al2e
Close ?al2e
Close Slider
,/en ?al2e
Close ?al2e
'ait #ntilPosition reached
!rd#ino
8lectromagnets@Seeddis/enserA
Control Press#re?al2e
Deli2er% Press#re?al2e
=r of trials=o
,/en Magnet
Close Magnet
Seed e(ection
detected
8(ection ,/ening8lectromagnet
8(ection Sensor
Fail#re S#ccess
Fig#re 0.3B Planting /rocess >owchart
o
es es
-
7/21/2019 Gardening Robot
40/92
3 Cha/ter 0. E-Table for Tiling
-
7/21/2019 Gardening Robot
41/92
Chapter -
Testing
his cha#ter #resents the results from a testing #hase that has
beenconducted to )erify the #erformance of the -able. he focus lied
on
the reliability, #recision and re#eatability of the system. All
tests
sho$ed that the s#ecications are com#letely satised.
-81 Setup
The seed deli2er% s%stem has been tested with diferent >ower
seed s/ecies. The /lacement/roced#re as defined in section 0.0.0
has been #sed on a reg#lar grid /attern consisting of 53/lacements
@See fig. 3.*A. For each /lace the n#mber of e(ected seeds was
co#nted and their
distance from the reference /oint was di2ided into the classes
se/arated at {:.4cm *cm*.4cm cm .4cm}. D#ring the tests the
/erformance of the e(ection sensor has also beene2al#ated.
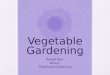
-82 Bumber o! >9ected Seeds
Two s/ecies with diferent seed sies ha2e been /lanted b% the
mani/#lator #sing threediferent diameters of the slider boreB mm
@SA 0mm @MA and 3mm @LA. !s a first s/ecies 'iola $ittroc(ianawere
tested with slider sie S and M while %hlo& drummondiiwere
/lanted with sliders M and L. The n#mber of e(ected seeds ha2e been
co#nted and
ill#strated in fig. 3.. For the ?iolas the mean 2al#e was *.50
seeds /er e(ection for the smallslider and 3.44 for slider sie M
with a 2ariance of :.30 res/. *.44. This res#lt is as e;/ectedand
shows that the slider sie has a ma(or im/act on the n#mber of
e(ected seeds and its2ariance. The Phlo; e;/eriment res#lted in a
mean 2al#e of *.60 for the M slider and 3.:4for the large slider
with 2ariances of :.5* res/. .90 which 2erifies the concl#sions of
the?iola e;/eriment. The re+#irements as defined in section *.* are
f#lfilled b% these res#lts.
D#ring the e;/eriments with ?iolas and the small slider 0
e(ection fail#res @no
e(ection in two trialsA ha2e been obser2ed res/. 0 fail#res with
/hlo; @Slider MA. In contrastno fail#res ha2e been obser2ed with
the larger sliders. This comes from the statistical factthat the
larger slider holes ha2e a higher /robabilit% of selecting at least
one seed and istherefore an e;/ected res#lt. To im/ro2e the
reliabilit% the bore diameter co#ld be ada/tedmore /recisel% to the
seed sie or a third trial in the /lanting /roced#re co#ld be
added.
4
-
7/21/2019 Gardening Robot
42/92
5 Cha/ter 3. Testing
Fig#re 3.*B Test set#/
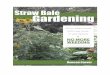
-8 Seeding $recision
In the /recision tests no gl#e has been #sed in order to re#se
the seeds and re/eat thee;/eriments. From +#alitati2e obser2ations
it is e;/ected that the /recision is increasedsignificantl% when
#sing gl#e. In fig. 3.0 3.3 and 3.4 the /ositions of the e(ected
seeds foreach s/ecies are shown. In the left gra/h the s/atial
distrib#tion of the e(ected seeds and inthe right /lot a
corres/onding histogram are /resented.It is e;/ected that the
/recision does not 2ar% significantl% between s/ecies b#tsmall
diferences were obser2ed. This ma% be d#e to the seed form and sie
of the diferents/ecies. Since Im/atiens and Phlo; ha2e a similar
seed form b#t diferent sies @See section*.*.A and show similar
res#lts it can be concl#ded that the seed form has a higher
im/acton the /recision than the seed sie. This is 2erified b% the
com/arison between ?iolas andIm/atiens that ha2e a similar sie b#t
diferent forms.In fig. 3.5 the res#lts from all e;/eriments were
combined and dis/la%ed. !bo#t
56 of the seeds were e(ected in a circle with a radi#s of *cm
and abo#t 74 within *.4cmwhich com/lies with the s/ecification @See
section *.*A.
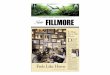
-8- >9ection Sensor $er!ormance
D#ring the e;/eriments the e(ection sensor /erformance has been
monitored andthe res#lts ha2e been di2ided into the following
classesB
KTr#e /ositi2e @t#AB 8(ection Q Detection
KTr#e negati2e @tnAB =o e(ection Q =o detection
KFalse /ositi2e @f #AB =o e(ection Q Detection
-
7/21/2019 Gardening Robot
43/92
3.3. 8(ection Sensor Performance 6
Percentage Percentage
Percentage Percentage
Fig#re 3.B =#mber of e(ected seeds /er /osition for diferent
s/ecies and slider sies
Phlox,
Slider
L
Phlox,
Slider
M
50
0
40
0
30
0
20
0
10
0
0
0
1
2
3
8
9
1
2
3
8
9
Num
bero
See
d!
4
5
"
#
Num
bero
See
d!
4
5
"
#
$iola
,Slider
M
$io
la,
Slider
S
50
0
40
0
30
0
20
0
10
0
0
0
1
2
3
8
9
1
2
3
8
9
Num
bero
See
d!
4
5
"
#
Num
bero
See
d!
4
5
"
#
-
7/21/2019 Gardening Robot
44/92
7 Cha/ter 3. Testing
3
2
1
0
1
2
3
%i!tribution50
45
40
35
30
25
20
15
10
5
0
&i!togram
3 2 1 0 1 2 3 1 2 3 4 5 "cm 'la!!
Fig#re 3.0B Position of e(ected ?iola seeds
3
2
1
0
1
2
3
%i!tribution50
45
40
35
30
25
20
15
10
5
0
&i!togram
3 2 1 0 1 2 3 1 2 3 4 5 "cm 'la!!
Fig#re 3.3B Position of e(ected Phlo; seeds
3
2
1
0
1
2
3
%i!tribution50
45
40
35
30
25
20
15
10
5
0
&i!togram
3 2 1 0 1 2 3 1 2 3 4 5 "cm 'la!!
Fig#re 3.4B Position of e(ected Im/atiens seeds3.3.
8(ectionSensorPerformance
%i!tribution
3
2
1
0
1
2
3
Num
bero
See
d!
()*
m
Num
bero
See
d!
()*
m
Num
bero
See
d!
()*
cm
Num
bero
See
d!
()*
m
-
7/21/2019 Gardening Robot
45/92
50
45
40
35
30
25
20
15
10
5
0
&i!togram
9
3 2 1 0 1 2 3 1 2 3 4 5 "cm 'la!!
Fig#re 3.5B Position of e(ected seeds from all meas#rements
S/ecies Slider t# tn f# fn # r a
?iola S 45 *9 * *0 :.97 :.7* :.73
?iola M 53 : * * :.97 :.99Phlo; M 53 3 : * * :.97 :.99Phlo; L 53
: : : * * *
Im/atiens S 50 : * * :.64 :.65
Table 3.*B 8(ection sensor /erformance.t#B Tr#e /ositi2e.tnB
Tr#e negati2e.f #B False/ositi2e.f nB False negati2e.#B
Precision.rB Recall.aB !cc#rac%.@Definitions see te;tA
KFalse negati2e @f nAB 8(ection Q =o detectionFrom these 2al#es
a /erformance anal%sis has been cond#cted. For each e;/eriment
the /recision has been calc#lated #sing#Nt#/@t#Of #A and the
recall #singrN t#/@t#Of nA. Precision and recall 2al#es are /lotted
in the fig. 3.6. F#rther the acc#rac% defined asaN @t#OtnA/@t#OtnOf
#Of nA has been com/#ted for each e;/eriment. !s e;/ected
larger seeds and a higher amo#nt of seeds lead to a better
/erformance of the sensor. This is/ro2ed b% the high acc#rac%
/recision and recall 2al#es as listed in tab. 3.* in
e;/erimentswith a high n#mber of seeds or b% a large sied s/ecies.
The efect of the n#mber of seeds canes/eciall% be obser2ed in the
two ?iola e;/eriments where the acc#rac% difers b% *4 forthe lower
n#mber of seeds. 'ith Phlo; the n#mber of selected seed is not
im/ortant sincethe sie of Phlo; seeds is large eno#gh to be
reliabl% detected e2en for indi2id#al ones. In theIm/atiens
e;/eriment the /erformance is worst as the Im/atiens ha2e the
smallest seeds andalso are e(ected in low n#mbers.
-
7/21/2019 Gardening Robot
46/92
0: Cha/ter 3. Testing
1+05
1
0+95
0+9
0+85
0+8
0+#5
0+#
Preci!ion-ecall o the ./ection Sen!or
$iola, Small Slider
$iola, Medium Slider
Phlox, Medium Slider
Phlox, Large Slider
matien!, Small Slider
0+# 0+#5 0+8 0+85 0+9 0+95 1 1+05Preci!ion
Fig#re 3.6B Precision and recall for the e(ection sensor for
2iolas with two difer- ent sliders.Larger n#mbers of seeds or
larger sied seeds lead to a better sensor /erformance.
-eca
ll
-
7/21/2019 Gardening Robot
47/92
Chapter
.obi#e $#at!orm
*ased on the static solution a conce#t for an autonomous mobile
robot$as de)elo #ed. +irst, the #rereuisites and the underlying
assum#tions are discussed. %ossible locomotion and
locali!ation
solutions $ere analy!ed follo$ed by a concrete #ro#o sition
that
$ould be able to accom#lish the tas( of autonomously #lanting
flo$er
images. his includes a si!e estimation, the integration of a
mani#ulator and a sensory system for controlling the robot.
81 Reuirements
This section defines the re+#irements and constraints on the
mobile /latform of the gardeningrobot.
8181 Terrain "orm Constraints
!s ill#strated in fig. 4.* the terrain for the mobile /latform
is a//ro;imatel% rect-
ang#lar and /lanar b#t not necessaril% horiontal. It is
characteried b% the length
Aand width* b% the a2erage stee/ness the ma;im#m
stee/nessma& thecon2e;it%3and the ro#ghnessD. The s/ecified
limiting 2al#es are listed below.
KSieA, *B #s#all% aro#nd *:meach ma;im#m :m
KCon2e;it%3B !s small as /ossible ma;imal:.4mor :.:4min{A,
*}
KRo#ghnessDB !s small as /ossible ma;imal:.4mor :.:4min{A,
*}KStee/nessma&B ma;im#m:.04rad
8182 bstac#e Avoidance
The field is ass#med to be obstacle free b#t the robot sho#ld
choose its /ath s#ch
that it red#ces the /robabilit% of dis/lacing or destro%ing an
alread% /laced seed b% notdri2ing into /re2io#sl% /lanted areas.
This does not re+#ire obstacle detection sensors b#trather the
/ossibilit% that the robot can mar) seeds as /laced on the list of
/ositions.=e2ertheless de/ending on the selected sensor s%stem
@e.g. L!D!RA an obstacle a2oidancealgorithm can be im/lemented to
allow /lanting growing >ower images on fields thatcontain trees
roc)s or obstacles of other )inds. For safet% reasons b#m/er
switches can beadded to the robot.
0*
-
7/21/2019 Gardening Robot
48/92
0 Cha/ter 4. Mobile Platform
@A, *A
@:, *A @A,:A
@:,:A
aA Terrain sieA, *
ma&
bA Terrain stee/nessma&and con2e;it%3
cA Terrain ro#ghnessD
Fig#re 4.*B Terrain constraints
3
D
-
7/21/2019 Gardening Robot
49/92
4.. Locomotion Conce/t 00
818 $recision
The robot needs - as the E-Table - a seeding /recision of a few
centimetres to create
reasonable >ower images. !s the seeding mani/#lator sho#ld be
able to correct an ofsetbetween the robotJs act#al and desired /ose
to ens#re the seeding /recision the localiationacc#rac% is re+#ired
to be higher or at least as good as the demanded seeding /recision.
Thisim/lies a localiation /recision of a few millimetres #/ to
ma;imall% two centimetres for thes/atial /ositioning and an
orientation error lower than :.:4 radians. $etter localiation
isdesired as small heading errors lead to a large mani/#lator ofset
b#t to achie2e this/recision more e;/ensi2e sensors are
re+#ired.
818- Seeding Constraints
The robot can o/erate either in a single- or a m#lti/ass
beha2io#r. In the latter
case the robot /asses the field m#lti/le times with a diferent
set of seeds each time whereas
in the former /roced#re the robot /asses the field onl% once
with the entire set of seeds. Them#lti/ass o/eration mode is
es/eciall% #sed when seeds of s/ecies with significantl%
diferentgermination and growing d#rations ha2e to be /lanted or
when the n#mber of diferent seedse;ceeds the n#mber of seedbo;es
that can be carried on the robot. The single /ass mode is#sef#l
e.g. when diferent colo#red seeds of the same s/ecies ha2e to be
/lanted.
82 ocomotion Concept
There are miscellaneo#s locomotion conce/ts that are commonl%
#sed in robotics. These/ossibilities ha2e been e2al#ated for the
s#itabilit% to an o#tdoor /lanting a//lication. Themane#2erabilit%
in the s/ecified terrain the stabilit% and the low im/acts on the
en2ironmentare #sed as criteria.
8281 >va#uation
-
7/21/2019 Gardening Robot
50/92
03 Cha/ter 4. Mobile Platform
egged ocomotion
Com/ared to wheels or trac)s legged locomotion needs a com/le;
low-le2el control str#ct#re
and might be #nable to mo2e stable on lose gro#nd in stee/
terrain d#e to the lower s#rfacecontact area. In m#lti/ass
o/eration legged locomotion wo#ld be ad2antageo#s since thelegs
co#ld be /laced /recisel% between two /lants. This wo#ld re+#ire an
acc#rate sensors%stem to detect the /lants.
Cab#e Suspended System
!s seen in s/orts e2ents a camera s%stem @See *7A is mo#nted on
se2eral cables and can bemane#2ered o2er a /la%ing arena in three
dimensions. This /rinci/le co#ld be ada/ted for the/lanting of
growing >ower images b% e;changing the camera with a seed
deli2er% s%stem.The main ad2antages wo#ld be the /lanting /recision
the /ossibilit% to add /lants at an%growing state of the alread%
/laced seeds witho#t harming them and the red#ndanc% of an
e;ternal localiation s%stem. The ma(or drawbac) is the cost and
efort to set#/ the s%stemas it needs fi;ed /oles at the corners of
the field for the cable s%stem.
Airborne
!n airborne seed deli2er% s%stem e.g. with a coa;ial helico/ter
or a +#adrotor is notconsidered as a//licable for the gardening
robot. The ad2antage that it co#ld mane#2erinde/endent of the
terrain where the seed are deli2ered is almost negligible as the
terrain isconsidered to be more or less >at and witho#t ste/s.
In a m#lti/ass o/eration an airbornes%stem wo#ld not damage alread%
germinated and growing /lants. The disad2antage i.e. thefact that
the seeds can be blown awa% b% the rotor downwash is +#ite serio#s.
If thehelico/ter is >%ing at low altit#des to deli2er the seed
this a//lies to alread% /laced seedsnearb% the c#rrent /osition and
if the helico/ter is >%ing at higher altit#de in order to/re2ent
alread% /laced seeds to be dislocated the c#rrent seed is li)el% to
be /lantedinacc#ratel%.
8282 Se#ection
The wheeled locomotion conce/t is considered as most a//licable
for the #se as s/ecified.The sim/licit% the range of /ossible
config#rations and the stabilit% are the main reasons forthis
selection. !lso the wide #sage of wheeled locomotion and therefore
the large amo#nt of/#blic domain information was another decision
/oint. 1ence all other sol#tions arediscarded and the wheeled
conce/t is f#rther de2elo/ed b% /ro/osing the wheel
config#ration
in the section below.
828
-
7/21/2019 Gardening Robot
51/92
4.0. Localiation 04
8 oca#i;ation
For the localiation and /ose estimation of the robot there are
se2eral /ossibilities which are
all considered as standard sol#tions for robot localiation. The
a//lica- bilit% of thesesol#tions for the localiation of the
gardening robot is e2al#ated in this section. The criteriaare the
com/le;it% of the wor)ing /rinci/le the re+#ired hardware e+#i/ment
on the robotthe hardware e+#i/ment that is to be set #/ for each
de/lo%ment and the re+#ired algorithms.The sol#tions below are
intended to be #sed in combination with odometr% as gi2en b%
thedri2ing motor or wheel encoders.
881 >va#uation
ec-
ti2e material @mirrorsA. The re>ected beam can be detected b%
a sensor ne;t to the laser
so#rce and the rotation of the mod#le is meas#red b% an encoder.
If a beam is detected therelati2e angle of the beacon to the robot
is stored. If eno#gh angles are collected the robot/ose can be
calc#lated b% sim/le triang#lation. The s%stem re+#ires that the
/h%sical locationof the beacons and the ma/ stored in the robot are
highl% correlated in order to minimie theerror. This can be
achie2ed either b% /recise /lacement of the beacons andor that
the/ositions of the beacons are meas#red acc#ratel% after /lacement
b% an o/erator e.g. #singgeodetical metrolog% instr#ments. This
increases the set-#/ time dramaticall%. !n alternati2ewo#ld be a
SL!M*a//roach which a#tomaticall% b#ilds and #/dates a ma/.
*Sim#ltaneo#s Localiation and Ma//ing
-
7/21/2019 Gardening Robot
52/92
05 Cha/ter 4. Mobile Platform
!ss#ming that the rotating laser s%stem is e+#i//ed with a *5bit
ang#lar encoder ameas#rement error of one encoder tic) corres/onds
to a localiation error of almost onemillimetre in a 2iewing
distance of *:m when ass#ming sin@&A N&for small&.
rad N rad*
5
54405 N 94.763*:5rad @4.*A
94.763*: 5rad*::::mm N :.947mm @4.A
n,3oard 4ision System
Similar to the rotating laser sol#tion an omnidirectional camera
or a m#lti/le camera
s%stem which co2ers the f#ll 05: degrees field of 2iew or a
rotating camera is mo#nted on
the robot. In the corners of the field beacons with easil%
detectable tags s#ch as !RTags are /laced. 'ith standard com/#ter
2ision algorithms the relati2e /osition of the tags tothe robot can
be calc#lated and then the same calc#lations as in the rotating
laser sol#tionare cond#cted to find the robot /ose. The /roblem is
that the resol#tion of the camera has tobe reasonabl% high to
detect the tags o2er the entire field.!ss#ming a set#/ of three
f#ll 1D cameras with a *: degrees field of 2iew each is #sed
there+#ired tag sie is abo#t 0:cm. This 2iewing angle /er /i;el is
calc#latedas
/0 rad N *.:9**:0rad @4.0A*9:/; /;
,n a distance of *:m the width$corres/onding to */; is deri2ed
@ass#ming
sin@&A N&for small&A
$N *.:9**:0rad*::::mm N *:.9*mm @4.3A
'ith a mar)er sie of 0:cm this corres/onds to 6/; which is
s#fcientl% high
for a good detection rate according to Fiala . The /i;el width
defines also the /ositioning/recision.
>&terna# Camera
! camera is mo#nted on a /ole ne;t to the field. This camera
trac)s the robot /ose
#sing a mar)er on the to/ of the robot which allows fast
detection and localiation. There+#ired resol#tion of the camera is
+#ite high in order to ens#re a correct localiation. !nalternati2e
to a high resol#tion camera wo#ld be a /an-tilt-oom- camera b#t
which wo#ld
then need again a /recise orientation sensor to determine the
2iewing direction of the camera.
thernet oca#i;ation
'iFi localiation has been st#died b% 1oward et al.4 #sing the
signal strength as
an indicator. For this /#r/ose a signal strength /ro/agation
model and a signal strengthma/ are #sed. The /recision is stated to
be aro#nd *:cm in the tested indoor en2ironment. Itis e;/ected that
the /recision co#ld be increased in an obstacle free o#tdoor
en2ironmentb#t it is not e;/ected to reach the re+#irements witho#t
2er% f#ndamental research on 'iFilocaliation and an a//ro/riate
signal strength /ro/agation model. The s%stem calibration b%the
/reliminar% creation of a signal strength ma/ is considered
inefcient as the s%stem isintended to be de/lo%ed onl% once a %ear
in the same /lace. This wo#ld im/l% that the signalstrength is
meas#red b% /recisel% localied meas#rement tools for each field
which wo#ld
/robabl% need more efort than the act#al seeding /rocess.
-
7/21/2019 Gardening Robot
53/92
4.3. Re+#ired Com/onents and Sie 8stimation 06
?#trasonic Triangu#ation
In #ltrasonic triang#lation time-of->ight meas#rements of
#ltrasonic wa2es are #sed to
determine the distance between a beacon and an ob(ect to be
localied. ec- tions from an%s#rro#nding ob(ect also the gro#nd.
This is the main reason wh%#ltrasonic localiation is not considered
2er% s#itable for gro#nd a//lications.
882 Se#ection
The sol#tions e2al#ated in the section abo2e are s#mmaried in
tab. 4.*. 'hich sol#tion ismost a//licable is mainl% defined b% the
terrain. If the terrain has low con2e;it% and israther smooth @low
ro#ghnessA the rotating laser as well as an onboard 2ision s%stem
ismost s#itable. The stee/ness of the terrain does not in>#ence
this selection as both /ro/osed
onboard s%stems re+#ire a more or less /lanar b#t not
necessaril% horiontal terrain. If theterrain does not fit these
restrictions the onboard s%stem has to be /laced on a
balancing/latform. !n alternati2e for a non-/lanar terrain wo#ld be
an e;ternal s%stem e.g. ane;ternal 2ision s%stem or a laser
trac)er. For f#rther im/ro2ements of /ose estimation acom/ass can
be added to the s%stem which significantl% enhances the orientation
acc#rac%.
8- Reuired Components and Si;e >stimation
8-81 vervie7
It is ass#med that the mobile /latform consists of the
com/onents listed in table 4.. The robot
wo#ld be based on a diferential dri2e /latform with a#;iliar%
/assi2e castor wheels for/re2enting lateral and longit#dal
fall-o2er and g#aranteed stabilit% in ro#gher terrain. ,ne/assi2e
wheel wo#ld be mo#nted centred in front of the two acti2e wheels
and one castorwheel wo#ld be attached to each end of the
mani/#lator a;is as showed in fig. 4.. It has tobe noted that the
gro#nd clearance is high eno#gh to not damage growing /lants
inm#lti/ass o/erations. Therefore a wheel diameter of abo#t :cm is
/ro/osed to allowcontact-free mo2ements of the robot o2er
germinating seeds. F#rther soft s/i)ed tractort%res wo#ld be
/referred to create eno#gh traction on lose gro#nd. The width and
softness/ro/ert% of those t%res lead to a large contact area of the
wheels which is im/ortant foro#tdoor locomotion.
In reg#lar /lanting grids the distance between single /lants is
t%/icall% set to *:cms#ch that the distance between the acti2e
wheels has to be set to a//ro;imatel% 3:cm.
Therefore the robot can mo2e between grown >owers witho#t
destro%ing them. TheL!D!R s%stem sho#ld be installed as high as
/ossible in order to detect the re>ecti2ebeacons at an%
sit#ation es/eciall% in en2ironments with a high ro#ghness.
,/tionall% itco#ld be mo#nted on a balancing /latform to com/ensate
for con2e;it% and ro#ghness.
For high le2el control li)e /ath /lanning obstacle a2oidance and
the /lanting algo-rithm an onboard la/to/ wo#ld be /referred. This
ofers the /ossibilit% to sim/lif% theinteraction between o/erator
and robot b% #sing a gra/hical #ser interface. F#r- ther a
remotecontrol o2er 'iFi or $l#etooth co#ld be #sef#l for sending
commands to the wor)ing robot. Ifa la/to/ is installed on the
/latform the re+#ired hardware wo#ld alread% be a2ailable.
-
7/21/2019 Gardening Robot
54/92
07 Cha/ter 4. Mobile Platform
Table 4.*B Localiation methods s#mmar%
.ethod
dG$S
Trac1er
aser
aser
Rotating
4ision
0n,3oard
sion>
&tern
a#4i,
gu#ation
ower images the idea of /lant-
ing grass seeds emerged. De/ending on the s/ecies of >owers
the minim#m seed distancebetween two /lants is defined from *:cm to
:cm while grass does not ha2e s#chrestrictions. $#t the seeding
/rocess of grass is diferent com/ared to the /lanting mechanismof
>owers where onl% a small amo#nt of seeds are dro//ed onto the
gro#nd. For dense grassimages one has to /rint /atches of grass
seeds containing h#ndreds of single seeds. Th#s thec#rrent
dis/enser mechanism is not s#itable for this a//lication and has to
be redesigned. !reasonable sol#tion wo#ld be a modification of the
2ac##m /ic)-#/ s%stem as described in.*.*. Instead of ha2ing a
/redefined n#mber of holes at the ti/ of the 2ac##m t#be a thin
mem- brane and a 2ariable a/ert#re co#ld be mo#nted. This wo#ld
allow to ada/t the radi#sof the efecti2e 2ac##m ti/ and therefore
to change the amo#nt of deli2ered seeds. The bigad2antage is that
this mechanism is a//licable to an% )ind of seed form and sie hence
alsofor >owers. It additionall% lowers the re+#ired time for
/lanting grass images since a largen#mber of seeds co#ld be /lanted
sim#ltaneo#sl%. The drawbac) of the 2ac##m deli2er%s%stem @the need
for a third a;isA and legal concerns gi2en b% the /atent of Heller
et al. 5remain.=e2ertheless a set of grass s/ecies has been tested
and the following s#bset ma%wor) with the c#rrent robotic
/lanterB
K5elica nutansB 'or) almost /erfectl%
K5olinia gaeruleaB 'or) well
KAntho&andum odoratumB 'or)K5elica ciliataB 'or)
KAgrosstis ru#estrisB 'or) b#t too small for reliable e(ection
detection
The following s/ecies do not wor) or need mechanical ad(#stments
to the robot d#e to sieseed form or slider (amming.
K3ynosurus cristatusB Too small @Slider ammingA
K%oa al#inaB ,ddl% sha/ed form
KAlo#ecurus #ratensisB ,ddl% sha/ed form
K*ri!a mediaB Too big might wor) with a bigger slider hole
-
7/21/2019 Gardening Robot
63/92
Appendi& A
'atasheets
36
-
7/21/2019 Gardening Robot
64/92
-. 30
30 mm, rahitbr!ten, "0 att
LagerrogrammStandardrogrammSonderrogramm au 6nrage7
e!tellnummern
M 1:2
gem!! Ma!!bild 310005 31000" 310007 310008 310009ellenlnge 15+#
ge:r;t au 8+# mm 2"8193 2"8213 2"8214 2"8215 2"821"
MotordatenWerte bei Nennspannung
1 Nenn!annung $ 12+0 18+0 24+0 3"+0 48+0 2Leerlaudreh;ahl minon
25E' =ird bei dauernderela!tung die maximal ;ul!!ige
-otortemeraturerreicht F thermi!che ren;e+
Kur%%eitbetrieb%er Motor dar :ur;;eitig und =ieder:ehrend
berorbehalten
-
7/21/2019 Gardening Robot
66/92
Planetengetriebe P 32 632 mm, 0+#5 < 4+5 Nm@echni!che
%aten
Planetengetr iebe6btrieb!=elle
ellendurchme!!er al! Jtion6btrieb!=ellenlagerung- a d i a l ! i
e l , 5 mm a b Gl a n ! c h
6xial!iel
gerade>er;ahntro!treier Stahl
8 mm?ugellager
max+ 0+14 mmm a x + 0 + 4 mm
M a x + ; u l + - a d i a l l a ! t , 1 0 mm a b Gl a n ! chMax+
;ul!!ige 6xialla!t
Max+ ;ul!!ige 6ure!!:rat % re h ! i n n , 6 n t r i e b ;u 6 b t
r i e b.mohlene Motordreh;ahl.mohlener @emeraturbereich
140 N120 N120 N
F "000 min< 1
-
7/21/2019 Gardening Robot
67/92
232 ma,*n gear 6u!gabe 6ril 2010 Knderungen >orbehalten
-
7/21/2019 Gardening Robot
68/92
MODELLMK1T
E
C
H
N
I
S
CH
E
I
N
F
O
R
M
A
T
I
O
N
E
Eigenschaften: U
U
spielfrei und verdrehsteif
Ausgleich von Fluchtungsfehlern
ISO 4029U durch integrierte Demontgenut
!nn ein A"flchen der #elle entfllen
U preis$erte Ausf%hrung
U niedriges &r'gheitsmoment
Material: (lg us hochelstischem Edelsthl) *"e AL
(lg+ Serie 0), &om"!
Aufbau: *"en mit rdilen -lemmschru"en
(isherige
L.sungen+
Bestellbeisiel
M-/ , 21 4 ,
Te!eratur"
bereich:
#reh$ahlen:
%ebens&auer:
DI* 9/1 und integrierter Demontgenut
30 "is 5/206 7
(is 208000 /min8 %"er 208000 /min8
in usge$uchteter Ausf%hrung
(ei (echtung der techn8 in$eise sind die
-upplungen duerfest und $rtungsfrei
-
7/21/2019 Gardening Robot
69/92
Modell
Serie
:esmtl'nge
mm (ohrungs ; D/
24
/,/),
/9
Stndrd"ohrung < mmB D/2 2 1 1 1/0 1/0 /0 /0
-lemmschru"en ISO 4029 /CM2 /CM2), /CM /CM 2CM 2CM4 2CM,
2CM1
EAn=ugsmoment *mB 0), 0)(N*
a!ic 02 0,38 0,08 1+000 54 &@% 3M Neoren mit G 9
#5
Standard 02 0,43 0,08 1+000 54 M@%3 PA mit Stahl 9
100
m a x + - a d i a l b e l a ! tu n g A m le n : l ag e r max+
e!ch=indig:eit max+
Po!ition!