Embed Size (px)
DESCRIPTION
Classical Mechanics
Citation preview

C H R
Lagrangian andHamiltonian Dynamics
12.1 INTRODUCTION
In previous chapters, we clearly demonstrated and established the importance of Newton's laws.By using Newton's second law and given initial conditions, we were able to obtain the equa-tions of motion of a given system and describe the motion of the system. Newton's laws can beused only if all the forces acting on the system are known; that is, the dynamical conditions areknown. Furthermore, we used rectangular coordinates, with an occasional use of polar, cylin-drical, or spherical coordinates.
In most situations, the problems are not that simple to solve by means of dynamical andinitial conditions, for example, a mass that is constrained to move on a spherical surface or abead that slides on a wire. In these situations, not only the unknown form of the forces of con-straints makes the problem difficult to solve, but using the rectangular or other commonly usedcoordinates may make it impossible to tackle the problem (even if the forces of constraints wereknown). Two different methods, Lagrange' s equations and Hamilton's equations, have been de-veloped to handle such problems. These two techniques are not the result of new theories. Theyare derived from Newton's second law and they offer much ease in handling very difficult prob-lems of a physical nature. First, these techniques use generalized coordinates. That is, insteadof being limited to the use of rectangular or polar coordinates and the like, any suitable quan-tity, such as velocity, linear momentum, angular momentum, or (length)2, is used in solvingproblems. Such generalized coordinates are usually denoted by qk, where ql may be v, q2 maybe x, g3 may be the angle 6, and so on. Furthermore, these techniques use an energy approach,having the primary advantage of dealing with scalars, rather than vectors. We shall discuss thesein detail in the following sections. We may briefly mention the difference between Lagrange'sand Hamilton's method. In Lagrange's formalism the generalized coordinates used are positionand velocity, resulting in second-order linear differential equations. In Hamilton's formalism the
463

464 Lagrangian and Hamiltonian Dynamics Chap. 12
generalized coordinates used are position and momentum, resulting in first-order linear differ-ential equations. These methods are not only helpful in solving the equations of motion de-scribing the system, but also can be used to calculate the constraint and reaction forces.
12.2 GENERALIZED COORDINATES AND CONSTRAINTS
To locate the position of a particle, we need three coordinates. These coordinates could be Carte-sian coordinates x, y, and z, cylindrical coordinates r, 6, and z, spherical coordinates r, 6, and(j), or any other three suitable coordinates. If there are some restrictions or constraints on the mo-tion of the particle, we need less than three coordinates. For example, if a particle is constrainedto move on a plane surface, only two coordinates are sufficient, while if the particle is con-strained to move in a straight line, only one coordinate is sufficient to describe the motion of theparticle.
Let us consider a mechanical system consisting of N particles. To specify the position ofsuch a system at any given time, we need N vectors, while each vector can be described by threecoordinates. Thus, in general, we need 3N coordinates to describe a given mechanical system.If there are constraints, the total number of coordinates needed to specify the system will be re-duced. As an example, suppose the system is a rigid body, and as we know, the distances be-tween different particles are fixed. These fixed distances can be expressed in the form of equa-tions. As we explained in Chapter 9, a rigid body can be completely described by only sixcoordinates; that is, only six coordinates are needed to specify the configuration of a rigid bodysystem. Of these six, three coordinates give the position of some convenient reference point inthe body, usually the center of mass with respect to the origin of some chosen coordinate sys-tem, and the remaining three coordinates describe the orientation of the body in space.
We are interested in finding the minimum number of coordinates needed to describe a sys-tem of N particles. Usually, the constraints on any given system are described by means of equa-tions. Suppose there are m number of such equations that describe the constraints. The mini-mum number of coordinates, n, needed to completely describe the motion or the configurationof such a system at any given time is given by
n = 3N — m (12.1)
where n is the number of degrees of freedom of the system. It is not necessary that these n co-ordinates should be rectangular, cylindrical, or any other curvilinear coordinates. As a matter offact, n could be any parameter, such as length, (length)2, angle, energy, a dimensionless quan-tity, or any other quantity, as long as it completely describes the configuration of the system. Thename generalized coordinates is given to any set of quantities that completely describes the stateor configuration of a system. These n generalized coordinates are customarily written as
or
<?!, q 2 , q 3 , . . . , q n
w h e r e k = 1 , 2 , 3 , ... , n
(12.2a)
(12.2b)
These n generalized coordinates are not restricted by any constraints. If each coordinate can varyindependently of the other, the system is said to be holonomic. In a nonholonomic system, thecoordinates cannot vary independently. Hence in such systems the number of degrees of free-

Sec. 12.2 Generalized Coordinates and Constraints 465
dom is less than the minimum number of coordinates needed to specify the configuration of thesystem. As an example, a sphere constrained to roll on a perfectly rough plane surface needsonly five coordinates to specify its configuration, two for the position of its center of mass andthree for its orientation. But these five coordinates cannot all vary independently. When thesphere rolls, at least two coordinates must change. Hence this is a nonholonomic system. Theinvestigation and description of nonholonomic systems are involved and will not be consideredhere. We shall limit ourselves to the discussion of holonomic systems for the time being.
A suitable set of generalized coordinates of a system is that which results in equations ofmotion leading to any easy interpretation of the motion. These qn generalized coordinates forma configuration space, with each dimension represented by a coordinate qk. The path of the sys-tem is represented by a curve in this configuration space. The path in the configuration spacedoes not lend itself to the same interpretation as a path in ordinary three-dimensional space. Inanalogy with Cartesian coordinates, we may define the derivatives of qh that is qx, q2, . . . , or qk
as generalized velocities.Let us consider a single particle whose rectangular coordinates x, y, and z are a function
of the generalized coordinates qu q2, and q3; that is
x = x{qv q2, q3) = x(qk)
y = y(<iv in <?3) =
z = 4qu q2, <73) = (12-3)
Suppose the system changes from an initial configuration given by (qh q2, q3) to a neighbor-hood configuration given by (qx + 8qu q2 + Sq2, q3 + 8q3). We can express the correspondingchanges in the Cartesian coordinates by the following relations:
dx dx dx dx(12.4)
with similar expression for 8y and 8z, where n is equal to three and the partial derivativesdx/dqk,.. . , are functions of q's. The value of n depends on the degrees of freedom. For exam-ple, if there were no constraints, m = 0, and from Eq. (12.1) for N = 1, n = 3, as we have usedabove, n would be less than 3 if there were constraints on the system.
Let us consider a more general case in which a mechanical system consists of a large num-ber of particles having n degrees of freedom. The configuration of the system is specified by thegeneralized coordinates qx, q2, . . ., qn. Suppose the configuration of the system changes from(qu q2, • • • , qn) t o a n e w c o n f i g u r a t i o n {qy + 8qu q2 + 8q2, . . . ,qn+ 8qn). T h e C a r t e s i a n c o -ordinates of a particle i change from (x,, yh z,) to (x, + 8xh yt + 8yh z, + Sz,). This displacements&Xj, 8yh and 8zt can be expressed in terms of the generalized coordinates qk as
dXi B
= —- 8q,dXi
dq- 8q2
dXi—dq
- 8qk =dxi s— - 8qkdq Hk
(12.5)
with similar expression for 8yt and 8zt. Once again the partial derivatives are functions of thegeneralized coordinates qk.

466 Lagrangian and Hamiltonian Dynamics Chap. 12
It is essential at this point to distinguish between two types of displacements: an actualdisplacement dr, and a virtual (not in actual fact or name) displacement Sr,. Suppose a mass m{
is acted on by an external force F, and causes the mass m, to move from r, to r, + drt in a timeinterval dt. This displacement must be consistent with both the equations of motion and theequations of constraints that describe this mass system; hence such displacements are actualdisplacements. On the other hand, virtual displacements are consistent with the equations of theconstraints but do not satisfy the equations of motion or time. For example, the bob of a pen-dulum of length / may be moved from (/, 6) to (/, 8 + 80) in any arbitrary time interval as longas the bob remains on the arc of a circle of radius /. Thus Sr, and 8qt axe the virtual displace-ments. We shall make use of the principle of virtual work in the following. We shall cause a vir-tual displacement Sr, resulting in virtual work SW. Basically, in such displacements, the rela-tive orientations and distances between the particles remain unchanged.
12.3 GENERALIZED FORCES
Single Particle
Consider a force F that is acting on a single particle of mass m and produces a virtual displace-ment Sr of the particle. The work done SW by this force is given by
SW = F • Sr = Fx Sx + Fy Sy + Fz 8z (12.6)
where Fx, Fy, and Fz are the rectangular components of F. We can express the displacements Sx,Sy, and Szin terms of the generalized coordinates qk. Making use of Eqs. (12.4) and (12.6), wemay write
(12.7)
where xdqk^
dqk
(12.8)
Qk is called the generalized force associated wth the generalized coordinate qk. The dimensionsof Qk depend on the dimensions of qk. The dimensions of Qk 8qk are that of work. If the incre-ment Sqk has the dimensions of distance, Qk will have the dimensions of force; if Sqk has the di-mensions of angle 0, Qk will have dmensions of torque Te. It may be pointed out that the quan-tity Sqk and the quantities Sx, Sy, and 8z are called virtual displacements of the system becauseit is not necessary that such displacements represent any actual displacements.
A System of Particles
Let us apply the preceding ideas to a general case of a system consisting of N particles acted onby forces F,- (i = 1 ,2 , . . . , TV). The total work done SWfor a virtual displacement Sr, of the sys-tem is
8W = SXi Fy Syt Fz Szt (12.9)

Sec. 12.3 Generalized Forces 467
Once again, expressing the virtual displacements in terms of the generalized coordinates, usingEq. (12.5), we get
Interchanging the order of summation, we get
n V N
or
= 1 L; = l
Qkk=\
N
where x- dqk '• dqk dq
(12.10b)
(12.11)
(12.12)
Qk is called the generalized force associated with the generalized coordinate qk. Once again, thedimensions of the generalized force Qk depend on the dimensions of qk but the product QiSk *s
always work.
Conservative Systems
Let us write an expression for the generalized forces that are conservative. Suppose a conserv-ative force field is represented by a potential function V = V(x, y, z). The rectangular compo-nents of a force acting on a particle are given by
F = -dV
F= ~dV
F=~dV
dx y dy z dz
Expression Qk for a generalized force given by Eq. (12.8) becomes
(12.13)
dx+
dz
(dV dx dV dy dV dz• + +
\ dx dqk dy dqk dz dqk
(12.8)
The expression in the parentheses is the partial derivative of the function V with respect to qk.That is,
(12.14)
This expresses the relation between a generalized force and the potential representing a con-servative system.

468 Lagrangian and Hamiltonian Dynamics Chap. 12
/ Example 12.1
Consider the motion of a particle of mass m moving in a plane. Using the plane polar coordinates (r, 0)as generalized coordinates, calculate (a) the displacement Sx and 8y, and (b) the generalized forces for aparticle acted on by a force F = iFx + j F +
Solution
isplackFz.
Since the plane polar coordinates (r, 8) are the generalized coordinates
qx = r and q2 — 6
dx dxx = x(r, 8) = r cos 8 — = cos 8, — = — r sin 8
dr d8
dy <3yy = y(r, 8) = r sin 8 — = sin 8, — = r cos 8
dr d6(a) The changes in the Cartesian coordinates are
Sx = — Sr + — 88 = cos d 8r - r sin 8 88dr dd
8y = — Sr + — 88= sin 8 Sr + r cos 8 88dr d8
(b) From the definition of generalized forces,
(i)
(ii)
(iii)
(iv)
dx
we get
dxFy sin 6 = F r (v)
xd8 y d8
r(—Fr sin 6 + Fv cos 8) =v X V '
= — rFv sin 0 + rF,, cos 6
(vi)
EXERCISE 12.1 Consider the motion of a particle of mass m moving in space. Using the generalizedcoordinates (r, 6, z), calculate (a) the displacement Sx, 8y, and 8z, and (b) the generalized forces for theparticle acted on by a force F = iFx + jF + kFz.
12.4 LAGRANGE'S EQUATIONS OF MOTION FOR A SINGLEPARTICLE
We are interested in describing the motion of a single particle by means of equations written interms of generalized coordinates. This leads us to Lagrange's equations. We could start withNewton's second law, F = ma. But it is convenient to start with an expression for kinetic energy

Sec. 12.4 Lagrange's Equations of Motion for a Single Particle 469
Tin terms of Cartesian coordinates and then write Tin terms of generalized coordinates. (Notethat we are using T instead of K for kinetic energy.) Let x, y, and z be Cartesian coordinates,while qx,q2,. . . ,qn are generalized coordinates. The kinetic energy of the particle in Cartesiancoordinates is
T = \m{x2 + y2 + z2)
since x = x(qu q2,. . ., qn) = x{q)
similarly y = y(q), z = z(q)
we can evaluate x in terms of qk by the following procedure:
dx dql
dq{ dt dq2 dt
A dx dqk _ " ax .
t=] d<lk dt k = \ dclk
(12.15)
(12.16)
(12.17)
x =dx dq2 dx dqn
dqn dt
= x(q, q) (12.18)
Thus we can describe the different components of velocity in terms of the generalized coordi-nates qk and generalized velocities qk\ that is,
x = x(q, q), y = y(q, q), z = z(q, q)
We may now write Eq. (12.15) for kinetic energy as
T = \m\x\q, q) + y\q, q) + k\q, q)]
Taking the derivative with respect to the generalized velocity qk,
dT (. dx . dy= m\ x -^r- + y T^
Using Eq. (12.18), we may write
d<lk
dx
. dzz—r
dx
(12.19)
(12.20)
(12.21)
(12.22)
Note that dx/dqk is the coefficient of qk in the expression of x in Eq. (12.18). Substituting thisand similar expressions for other terms in Eq. (12.21),
(12.23)dT . dx . dxc . Idz
—— = m\x h y h zdqk \ dqk dqk dqk
Now differentiate both sides of this equation with respect to t:
d
dt
d ( dT\ .. dx .. dy .. dz . d I dx\ . d 1 dy— —— = mx h my h mz V mx — + my —dt \dqk) dqk dqk dqk dt \dqk) dt \dqk
. d ( dz+ mz — —
dt \dqk(12.24)

470 Lagrangian and Hamiltonian Dynamics Chap. 12
To simplify the last three terms on the right side, we use the fact that dldt and d/dqk areinterchangeable.
d_ (dx\ _ J_ ldx\ _ dx_
dt\dqj ~ dqk\dt) ~ dqk
Thus the fourth term on the right of Eq. (12.24) may be written as
. d { dx \mx
. dx= mx = mx'dt \dqj dqk dqk \2
with similar expressions for other terms. Also note that
Fx = mx, Fy = my, Fz = mi
Combining Eqs. (12.25) and (12.26) with Eq. (12.24), we obtain
d I dT\ dx dy dz d [1— —• = F + F-~ + F7 + — -dt\dqj xdqk
y dqk dqk dqk[2
(12.25)
(12.26)
(12.27)
(12.28)
Using the definition of generalized force and kinetic energy given by Eqs. (12.8) and (12.20),
dz
in Eq. (12.28) gives
dx dy= F— + Fy-z
L
dqk dqk
T = \m[x2(q, q) + y\q, q) + z\q, q)]
dqkdt \dq
(12.8)
(12.20)
(12.29)
These differential equations in generalized coordinates describe the motion of a particle and areknown as Lagrange 's equations of motion.
Lagrange's equations take a much simpler form if the motion is in a conservative forcefield so that
which on substituting in Eq. (12.29) yields
d (dT\ _ ^T _ ^V
dt \dq'J dqk dqk
(12.30)
(12.31)
Let us define a Lagrangian function L as the difference between the kinetic energy and poten-tial energy; that is,
L=T-V or L(q, q) = T(q, q) - V(q) (12.32)

Sec. 12.4 Lagrange's Equations of Motion for a Single Particle 471
It is important to know that, if V is a function of the generalized coordinates and not of the gen-eralized velocities, then
dVV = V(q) and — = 0 (12.33)
[If V is not independent of velocity q, then V = V(q, q) will lead to a tensor force, which wewill not discuss here.] Thus we may write
- V)=
dV
Substituting these results in Eq. (12.31) yields
d I dL dL
dt \dqj dqk= 0 (12.34)
which are Lagrange's equations describing the motion of a particle in a conservative force field.To solve these equations, we must know the Lagrangian function L in the appropriate general-ized coordinates. Since energy is a scalar quantity, the Lagrangian L is a scalar function. Thusthe Lagrangian L will be invariant with respect to coordinate transformations. This means thatthe Lagrangian gives the same description of the system under given conditions no matter whichgeneralized coordinates are used. Thus Eq. (12.34) describes the motion of a particle movingin a conservative force field in terms of any generalized coordinates.
Example 12.2
Consider a particle of mass m moving in a plane and subject to an inverse-square attractive force. Find theequations of motion and expressions for the generalized forces.
Solution
Let the plane polar coordinates (r, ff) be the generalized coordinates to be used in this problem. The polarcoordinates (r, ff) and the Cartesian coordinates (x, y) are related by
x = r cos 6 and y = r sin 6 (i)
Using these relations, we obtain the following expressions for the kinetic and potential energy:
T = \mv2 = \m(x2 + y2) = \m(r2 + r2d2) (ii)
Thus the Lagrangian in the coordinates (r, ff) is
L=T-V= -m(r 2 - r2ff2) (iv)

472
In Lagrange's equations,
let us substitute qi = r and q2 = 9 so that
Lagrangian and Hamiltonian Dynamics Chap. 12
d (3L\ _ BL
dt \dqk) 3qk
d_(dL\_dL=Q
dt\dr dr
and
From Eq. (iv),
dt \d6 38
dL . d (dL\—- = mr, — —r ' = mr
dr
u\ .. dL -2 k, r = mr, and — = mrd ~
dt\dr dr r2
Substituting these in Eq. (v), we obtain
mr — mrd = — -^
Since the particle is moving in a conservative field, we may write
F(r) = -dV{r) ~ »( "
and Eq. (vii) takes the form, F(r) = Fr.
dr dr\ r r2
mr = mrd2 + Fr
Once again from Eq. (iv)
dL" = mr26, — = 0, and - (~
dd dd dt \d0
Hence Lagrange's Equation [Eq. (vi)] takes the form
Imrrb + mr2d = 0
d , . dJor — (mr 6) = —
= Imrr'd + mr2d
(.V)
(vi)
(vu)
(viii)
(ix)
(x)
(xi)
where J, which may be identified as the angular momentum, is constant. That is, the integration of Eq. (xi)yields
J = mr2b = constant (xii)

Sec. 12.4 Lagrange's Equations of Motion for a Single Particle 473
Thus we may conclude that in a conservative force field the angular momentum J is a constant of motion.Also, as from the previous example,
Q, = Fr and Qe = rFg
we may arrive at the following using Eq. (12.33),
dt\dr
d_l dT
dt \ 86
dr
F=m'r — mr6
(xiii)
(xiv)
dJ
dt
That is,
and Qe = T = n
where Qe = T is the torque and is equal to zero.
EXERCISE 12.2 Repeat the example for the case of a repulsive inverse-square force. How does the sit-uation in this exercise differ from the one in the example?
Example 12.3
Consider an Atwood machine consisting of a single pulley of moment of inertia / about an axis throughits center and perpendicular to its plane. The length of the inextensible string connecting the two massesand going over the pulley is /. Calculate the acceleration of the system.
Solution
Let x be the variable vertical distance from the pulley to the mass mu while the mass m2 is at a distance/ — x from the pulley, as shown in Fig. Ex. 12.3. Thus there is only one degree of freedom x that repre-sents the configuration of the system. The velocity of the two masses and the angular velocity of the diskmay be written as
(i)
Figure Ex. 12.3

474
and
Lagrangian and Hamiltonian Dynamics
where v = \v, \ = u, = x
Chap. 12
(a)
Therefore, the total kinetic energy of the system is
1 , 1 , 1 1 x2
(iii)
while the potential energy of the system is
V = -m^x - m2g(l - x)
The Lagrangian of the system is
L = T - V = - (m, + m2 + - r l i 2 + g(m, - m2)x + m2gl (v)2 \ a /
There is only one degree of freedom, which is the generalized coordinate q = x. Lagrange's equation is
d (dL\ dL— — = 0 (vi)dt\dx) dx
From Eq. (v)
—r = I m, + m, + —j5x V a
d (dL IV. J dL
Substituting these in Eq. (vi), Lagrange's equation takes the form
m2+ -̂ ji' = - m2)
.. =. g(ml - m2)
{mx + m2 + I/a2)(vii)
If/ = 0,x = [(/«! - m2)/(m, + m2)]g.If mj > m2, mass m! descends with a constant acceleration.If m, < m2, mass m, ascends with a constant acceleration.
EXERCISE 12.3 Consider a double Atwood machine, as shown in Fig. Exer. 12.3. Assuming friction-less pulleys, that is, h = I2 = 0, calculate the accelerations of the masses. Assume two degrees of free-dom Xj and x2, as shown.

Sec. 12.4 Lagrange's Equations of Motion for a Single Particle 475
m3 Figure Exer. 12.3
Example 12.4
Consider Atwood's machine discussed in Example 12.3. Assume that the pulley is frictionless, and cal-culate the tension S in the string, as shown in Fig. Ex. 12.4.
l!i l-x
i
Figure Ex. 12.4

476 Lagrangian and Hamiltonian Dynamics Chap. 12
SolutionIn Example 12.3, while discussing Atwood's machine, we were interested only in the motion of the sys-tem; hence the coordinate / was constrained to have a constant value. To find the tension in the string, thelength / must be included as a coordinate. Since the pulley is frictionless, there is no rotational kinetic en-ergy. Hence the expression for the kinetic energy is given by
i (dx\2 i rlt (i)
The two forces acting on the system are the tension S in the string and the force of gravity, as shown. Thework done when x increase to x + Sx, while / remains constant, is
8W = (mlg - S)Sx + (m2g - S) 8(1 - x)
= (ml8 - S) 8x + (m2g - S)(- Sx)
= (m, - m2)g Sx
Comparing with
8W = Qx 8x
we get Qx = (m, - m2)g
The work done when / increases to / + 81, while x remains constant, is
8W = (m,g - S)8x + (m2g - S) 8(1 - x)
= 0 + (m2g - S) 81
Comparing with
8W = Q, 81
we get Q, = m2g - S
(ii)
(iii)
Note that the generalized force Qx does not contain S, while g, depends on S. To solve for S, we must solvethe following two Lagrange equations.Lagrangian equations for the coordinates x and 1, given by Eq. (12.29), and the generalized
forces given by Eqs. (ii) and (iii), are
£ . ^ _ T - —T=(ml - m2)-gdt dvx dx
(iv) 1 . ^ _ T _ -T»(m2-g -S) | (v)dt \dvl / dl
We solve these equations by substituting for T and simplifying
— (ml-vx- m2-(vl- vx)) p(ml - m2)-gdt
—m2-(vl- vx)=(m2-g- S)dt
Substituting for vl = 0 and al = 0, we get the two resulting equations
ml-ax+m2-ax=(ml - m2)-g (vi) -m2-ax=m2g-S (vii)

Sec. 12.4 Lagrange's Equations of Motion for a Single Particle 477
We solve Eqs. (vi) and (vii) for S and ax, as shown below.
Givenml-ax-t-m2-ax=(ml - m2)g
-m2-ax=m2-g- S
Find(S,ax)"
2-m2-gml
S=2-m2-g-ml
(ml + m2)
(-ml + m2)
(ml + m2)
(viii) ax=(ml - m2)-m2)
(ix)(ml -t-m2)
The value of S is given by Eq. (viii), while the value of x is calculated from Eq. (ix), as
shown below.
Let ax = (vf-vO)Al, andusing this in Eq. (ix) we get
Integrating from xO to x and t = 0to tO = t
We get the displacement x as
vf- vO=g- (ml - m2)|_ (ml + m2)J
ldxl=
xO
vO-t-g-(ml - m2)tl
(ml -t-m2)-dtl
n t „ 1 (ml - m2) 2x - x O = t - v O - t - — -t •;
2 (ml + m2)
EXERCISE 12.4 Repeat the example assuming that the pulley is not frictionless and that it has a mo-ment of inertia /.
12.5 LAGRANGE'S EQUATIONS OF MOTION FOR A SYSTEMOF PARTICLES
Let us extend the procedure outlined in the previous section to a more general case consistingof N particles. Thus the kinetic energy of such a system is
(12.35)
Instead of using the coordinates x, y, and z, we represent the Cartesian coordinates by xt. Sinceeach particle has three degrees of freedom, the total number of xt coordinates needed to repre-sent N particles will be 3iV. Hence we may write the kinetic energy of the system as
3N
;= i
(12.36)

478 Lagrangian and Hamiltonian Dynamics Chap. 12
where the Cartesian coordinates x; are functions of the generalized coordinates qk. It is possiblethat the relationship between x, and qk may involve time explicitly. Hence, we may write
dxt
dt
= xi(iv i2>---> 4n> t) = xt(q, t)
dx, . dx, dxt . dxi
dqx dq2 dqn dt
(12.37)
That is, (12.38)
where i = 1 , 2 , . . . , 3N, N being the number of particles in the systemk = 1, 2 , . . . , n, n being the generalized coordinates or degrees of freedom of the
system
From Eq. (12.38), we may conclude that 7 is a function of the generalized coordinates qk.of the generalized velocities q'k, and of time t; thus
T = T(q, q, t)
Differentiating T with respect to q, we get
dl d / - ^ 1 7 \ -r^ a / i— I > — m v I ^ > I — M— • I / t i^i \ ' ' ' \ r%
From Eq. (12.22),
dx dx
dqk dqk
which on substituting in the preceding equation gives
dT v / . dxt—~ = ZJ I miXi
Differentiating with respect to t, we get
d ( dT^ , d ( dx
The expression for the generalized force Qk given by Eq. (12.8),
dx+
takes the following form for a system of particles:
(12.39)
(12.22)
(12.40)
(12.41)
(12.8)
(12.42)

Sec. 12.5 Lagrange's Equations of Motion for a System of Particles 479
We also extend the results of Eq. (12.26) to the present case for a system of particles; that is,
^ . d (dxA 1 .2V - niixfy dqk\2 ' '
dT
dqk(12.43)
Combining Eqs. (12.41), (12.42), and (12.43), we obtain the following Lagrange's equations fora system of particles:
d (dT\ _ dT
dt {dq'J ~ Qk+ dqkk = 1 , 2 , . . . , n (12.44)
The number of equations is equal to the number of degrees of freedom n of the system.If the system is conservative so that there exists a potential function V(q), we may write
Qk=-dV
(12.45)
and, as before, we may define the Lagrangian function L = T — V and write Lagrange's equa-tions of motion for a system of particles as
A (Ikdt \dqj dq
dL= 0, k = 1, 2 , . . . , n (12.46)
Of the generalized forces Qk, suppose some of these, say Q'k, are not conservative and cannot bederived from a potential function, while the remaining forces are conservative. (Frictional forcesare a typical example of nonconservative forces.) In such cases, we can still define the La-grangian function as L = T — V, while Eqs. (12.45) and (12.46) take the form
and dfdLfdt\dq' dqk
=
* *
dqk
k= 1,2, ...,n
(12.47)
(12.48)
These equations can be applied to the motion of a single particle as well.We are now in a position to illustrate the use of Lagrange's method for obtaining and solv-
ing equations for simple systems. It is convenient to do this if we use the following procedureas a guide.
1. Select a proper set of generalized coordinates to represent the configuration of the system.2. Express the kinetic energy T of the system in terms of generalized coordinates and their
time derivatives (velocities).3. If the system is conservative, express the potential energy V as a function of the general-
ized coordinates; otherwise, find an expression for the generalized forces Qk.4. Finally, using the preceding information, write Lagrange's equations of motion.

480 Lagrangian and Hamiltonian Dynamics Chap. 12
For systems with constraints and for finding the forces of constraints or reactions, a fewmore steps are needed, as will be discussed in the next section.
/ Example 12.5
An inclined plane of mass M is sliding on a smooth horizontal surface, while a particle of mass m is slid-ing on a smooth inclined surface, as shown in Fig. Ex. 12.5. Find equations of motion of the particle andthe inclined plane.
M
Figure Ex. 12.5
Solution
The system has two degrees of freedom; hence we need two generalized coordinates to describe the con-figuration of the system. Let the two coordinates xx and x2, as shown in the figure, represent the dis-placements of M and m from the origins O, and O2, respectively. The velocity of M with respect to Ox isi [ , while that of m with respect to O2 is x2. The velocity v of m with respect to Oh as shown in the insert,is v = x, + x2 = i>i + v2.
Different quantities used are
vl = velocity of M with respect to Oiv2 = velocity of m with respect to Cfev = velocity of m with respect to OiT = kinetic energyV = potential energyL = Lagrangian
v-flxldt dt
v=Jvl +v2 + 2-vl-v2-cos(9)
T=i-Mvl2-i-i-m-v2
2 2
T---M-vl 2 +• i-m-(vl2 +- v22 +• 2-vl-v2-cos(9))2 2 V ;
V=-m-g-x2-sin(8)
L = T - V
The two Lagrangian equations for the coordinates xl and x2 are
dtdvl dxl
d d d .L -|dtdv2 dx2
The resulting two equations are
m-a2-|-m-al-cos(e)=0 ( M a i -t- m-al +• m-a2-cos(9)) - m-g-sin(8)=0

Sec. 12.5 Lagrange's Equations of Motion for a System of Particles 481
Let us solve for al and a2, the two accelerations
Givenm-a2-t-m-al-cos(8)=0
(M-al +• m a l + m-a2-cos(6)) - m-g-sin(9)=0
Find(al,a2)-l^m-cos(9) - M - m
1
•m-g-sin(9)
(m-cos(6) - M - m)
a l=- -1
m-cos(Q) - M - mj•m-g-sin(e)
m-g-sin(6)-cos(9)
a2=-
(m-cos(9) - M - m )
-•m-g-sin(9)-cos(9)
Knowing the initial conditions, we can solve these equations for the velocities anddisplacements by integrating al and a2.
EXERCISE 12.5 Solve the example for the situation shown in Fig. Exer. 12.5.
O2
Figure Exer. 12.5
12.6 LAGRANGE'S EQUATIONS OF MOTIONWITH UNDETERMINED MULTIPLIERS AND CONSTRAINTS
In the beginning of this chapter, we briefly mentioned the difference between holonomic sys-tems (in which the coordinates can very independently) and nonholonomic systems. In this sec-tion, we describe holonomic and nonholonomic constraints in more detail and their usefulnessin solving for the forces or reactions of constraints. Holonomic constraints can be expressed asalgebraic relations among the coordinates, such as
f,(xt, t) = 0, where / = 1, 2 , . . . , m (12.49)
where m is the number of constraints. In such cases it is always possible to find a set of propergeneralized coordinates in terms of which the equations of motion can be written and are freefrom explicit reference to the constraints. On the contrary, in nonholonomic constraints, the con-straints are expressed as relations among the velocities of the particles of the system; that is,
,-, xt, t) = 0, where / = 1, 2, . . . , m (12.50)

482 Lagrangian and Hamiltonian Dynamics Chap. 12
If these equations of nonholonomic constraints can be integrated to yield relations among thecoordinates, then the constraints become holonomic and the usual procedure for solving theproblem can be carried out. Equations representing inequalities, such as a molecule moving any-where in a cube, are examples of nonholonomic constraints, because in this case the constrainton the motion of the molecule is that it can be anywhere as long as x =£ L, y *£ L, and z^L. Letus illustrate these points with the help of a few examples.
As an example of a holonomic constraint, consider the motion of a particle constrained tomove over a spherical surface of radius a with its center at the origin. In rectangular coordinates,the equation of constraint is
X2 + y2 + Z2 = a 2 ( 1 2 > 5 1 )
The displacements are related by the equations
x dx + y dy + z dz = 0 (12.52)
The differential Eq. (12.52) can be integrated to obtain Eq. (12.51). Thus Eqs. (12.51) and(12.52) form only one equation of constraint. Not all three coordinates x, y, and z are indepen-dent. Since there is one equation of constraint, only two coordinates will be enough to describethe position of the particle. Similarly, if using spherical coordinates r, 8, and <j>,
r = a = constant
and 8 and </> are sufficient to describe the position of the particle. Suppose we use directionalcosines as generalized coordinates to describe the position of the particle; that is,
xa
y_a
and q3 = (12.53)
qu q2, and g3 are not all independent, and from Eq. (12.51)
or
That is,
.2 _q\ + qi + qi = (12.54)
(12.55)
Since qi can be expressed in terms of the coordinates ql and q2, there are only two independentcoordinates.
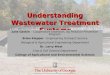
As a second example, let us consider a circular disk of radius a rolling over a perfectlyrough (absolutely no slipping allowed) horizontal plane XY, as shown in Fig. 12.1. The plane ofthe disk is vertical at all times (that is, z = a and a = IT/2, where a is the angle between theplane of the disk and the horizontal plane XY). Thus, to describe the configuration of the disk atany instant, we need four coordinates: x, y, 6 and <f>. The coordinates x, y of the center of thedisk (with z = a) describe the translational motion of the disk and locate the point of contact ofthe disk with the plane. Angle 8 describes the rotational motion of the disk about the center ofmas^; that is, 8 is the angle between a fixed radius in the disk and the vertical. Angle </> deter-

Sec. 12.6 Lagrange's Equations of Motion with Multipliers/Constraints 483
z i
Figure 12.1 Circular disk of radius arolling over a perfectly rough (abso-lutely no slipping) horizontal plane XY.Tangent TT' makes an angle <j> with theX-axis.
mines the orientation of the plane of the disk with respect to the X-axis; that is, it gives the in-stantaneous direction of the motion. These coordinates are not all independent. Because of theconstraints, the velocity v of the center of mass and 0 are related by
v = a9
which results in the velocity components
x = v cos 4> = a6 cos <f>
y = — w sin <f> = —ad sin </>
These yield the following two equations of constraints:
dx = a dd cos (/>
Jy = —addsin 0
(12.56)
(12.57)
(12.58)
Neither of these differential equations can be integrated to obtain two relations between x, y,and (f>. Such constraints in which differential equations are not integratable are called nonholo-nomic constraints. A system containing such constraints is called a nonholonomic system. Thusthe disk in this example has four degrees of freedom and we need four coordinates to solve theproblem.
What happens if the plane is not rough, that is, slipping takes place? In such cases, theEqs. (12.58) of constraints do not hold and the system becomes holonomic: again four coordi-nates are needed to describe the motion. We need to known x, y, 6, and cj). On the other hand,when the disk is allowed to roll only, if 6 is given, and any one of the remaining three x, y, and 4>is also given, then the remaining two can be calculated from Eqs. (12.57). The rolling disk hastwo degrees of freedom. The disk is free to roll and rotate.
As an alternative, suppose the disk was constrained to roll along a prescribed curve. Let smeasure the length of the path along this curve. In this case, Eq. (12.56) takes the form
ds = add (12.59)

484 Lagrangian and Hamiltonian Dynamics Chap. 12
which may be integrated
s — a9 = constant (12.60)
We have a condition representing a holonomic constraint, hence a holonomic system.Finally, let us consider an example of a disk rolling down an inclined plane, as shown in
Fig. 12.2. The disk is rolling without slipping. The position can be located by two coordinates^ and 6. The velocities s and 6 are related by
which can be integrated to give
s = aO
ds = add
s — ad = constant C
(12.61)
(12.62)
(12.63)
Even though initially the constraint is expressed in terms of velocities [Eq. (12.61)] it can be in-tegrated to give the relation between the coordinates [Eq. (12.63)]. Thus the system is holonomicwith one equation of constraint, and only one coordinate is needed to describe the system.
Thus we conclude: If in a certain system, the constraint on the velocities can be integratedto give a relationship between the coordinates, then the constraint is holonomic.
Let us pursue our discussion still further. Consider a constraint relation of the form
i= 1 , 2 , 3 , . . . (12.64)
In general, this is nonintegrable; hence it represents a nonholonomic constraint. But if At and Bhave the following form,
A- = M. Bdx- dt
then Eq. (12.64) may be written in the form
dX; dt
(12.65)
(12.66)
y//////////////////////////////////////Figure 12.2 Disk rolling down, with-out slipping, an inclined plane.

Sec. 12.6 Lagrange's Equations of Motion with Multipliers/Constraints 485
which gives
and may be integrated to givedt
f(x{, t) — constant
(12.67)
(12.68)
Hence a constraint given by Eq. (12.64) is actually holonomic. Thus, in general, a constraint ex-pressed as
Mdt
(12.69)
or dt = o (12.70)
is entirely equivalent to
0 = 0 (12.71)There are certain advantages in expressing constraints in a differential form, rather than
as algebraic expressions. In these situations, the constraint relations can be directly incorporated(without first integrating them) into Lagrange's equations by means of the Lagrange undeter-mined multipliers. Suppose the constraints are expressed as
where / = 1,2,... ,m and k = 1,2,... ,n; then Lagrange ' s equations take the form
dt \dq
(12.72)
(12.73)
A;(0 are the undetermined multipliers and they simply represent the forces of constraints. Thereare the same number of A, as the number of equations of constraints. The following examplesillustrate the use of the equations of constraints and the method of undertermined multipliers forcalculating the forces of constraints.
Example 12.6
Discuss the motion of a disk that is rolling down an inclined plane without slipping. Also, find the forcesof constraints by using the method of undetermined multipliers.
Solution
The situation is shown in Fig. Ex. 12.6. Use y and 0 as the two generalized coordinates. Thus the total ki-netic energy, which is the sum of the translational energy and rotational energy, may be written as, notingthat the moment of inertia of the disk is / = \MR2,
T = \My2 + \IO2 = \My2 + \MR202
while the potential energy is, assuming potential energy at the bottom to be zero,
V = Mg(l - y) sin 0
(i)
(ii)

486 Lagrangian and Hamiltonian Dynamics Chap. 12
V///////////////////////////////////////////////Figure Ex. 12.6
Thus the Lagrangian of the system is
L = T - V = \My2 + \MR2B2 - Mg(l - y) sin <f> (iii)
The equation of the holonomic constraint giving the relation between the coordinates y and 6 is
Ay, 6)=y-Rd = 0 (iv)
Thus, if the disk rolls down without slipping, the preceding constraint relation must hold good. Hence, in-stead of two degrees of freedom y and 6, we have only one degree of freedom. One of the two coordinatesy and 6 may be eliminated from Eq. (iii) by using the relation given by Eq. (iv); then the equations of mo-tion may be obtained by using Lagrange's equations (see Exercise 12.6).
Alternatively, we can use both y and 6 as generalized coordinates and the method of undeterminedmultipliers. This method yields much more information, as we see now.
a9=0" ay=y" v6=8' vy«y'The different quantities are
y_R.9=s0 ay-Ra6=0 (i)The equations of holonomic constraints,which after differentiation give the j 2 j 2 lrelation between the acceleration ayand a9, are given in Eq. (i)
T=--M-vy -t-— I-v92 2 2
V=M-g-(Uy)-sin(((.)
M- vy2 + i-
4
The expressions for T, V, and L are
f = constraint functionX = undetermined multiplier
L=T
fey-R-9 ^ - 1dy
l - y)-sin(»
d9
The resulting Lagrangian equations for y and 9 are as shown.
— L L-X-—f=0 (ii) — L L-^-—f=0dt\dvy / dy dy dt^dv6 / d6 d6
Substituting the values of L and f, we get the following two equations.
M-ay- M-g-sin(<|>) - X=0 (iv) — MR2-ae- X.R=0
(iii)
(v)

Sec. 12.7 Generalized Momenta and Cyclic (or Ignorable) Coordinates 487
Using Eqs. (i), (iv), and (v), wecan solve for the three unknownsay, a0, and X.
Given
a y - R
li-M-2
•a0=O
R 2 a 9 -
M-ay-M-g-sin((|>)- A.=0
(3-R)
—-M-
2
3
2
3-R
M
3
The expressions for ay, a0, and X reveal that these are constants for this situation. X givesthe magnitude of the force of constraint resulting from a frictional force.
EXERCISE 12.6 (a) Find Lagrange's equation for the example using 8 as the independent coordinate.Solve the equation and interpret the results, (b) Find Lagrange's equation for the example using y as theindependent coordinate. Solve the equation and interpret the results.
12.7 GENERALIZED MOMENTA AND CYCLIC (OR IGNORABLE)COORDINATES
In previous sections, we have shown how to describe a system by means of Lagrange's equa-tions. For a system with n degrees of freedom, we need n generalized coordinates. The La-grangian L was described in terms of generalized coordinates qk and generalized velocities qk.Furthermore, if a Lagrangian were an explicit function of time, we wrote
L(q, q, t) = L(qx, q2, qn; qu q2, n\ t) (12.74)
As we know, Lagrange's formalism leads to n second-order differential equations.An alternative to Lagrange's formalism is Hamilton's formalism. Hamilton's formalism
is carried out in terms of generalized coordinates and generalized momenta. That is, if theHamiltonian H is an explicit function of time, then
H = H(q, p, t) = H(qv q2, . . . , qn\ px, p2, . . . , pn; t) (12.75)
Such formalism for a system of n degrees of freedom leads to In first-order differential equa-tions. These In first-order equations are much easier to solve than n second-order differentialequations, as in the case of Lagrange's formalism.
To begin, let us define the generalized momentum. As a simple example, let us considerthe motion of a single particle moving with velocity x along the X-axis. The kinetic energy ofsuch a particle is
T = \mp (12.76)

488 Lagrangian and Hamiltonian Dynamics Chap. 12
Usually one defines momentum p as p = mx. But in the present formalism, we define the mo-mentum p to be
dTP = dx
(12.77)
If we substitute the value of T from Eq. (12.76) into (12.77), we get p = mx. Furthermore, ifV is not a function of the velocity x, that is, V = V(x), then the momentum p may also be writ-ten as
dLP = dx
(12.78)
We now utilize these concepts to define the generalized momentum. For a system described bya set of generalized coordinates qh q2,. . ., qk,. . . , qn, and the corresponding generalized mo-menta/)!, p2,. . . ,pk,. . . ,pn, we define the generalized momentumpk corresponding to gener-alized coordinate qk as
dLPk = -— (12.79)
dak
The generalized momentum pk is also called the conjugate momentum pk (conjugate to coordi-nate qk). It may be pointed out that the generalized momenta do not always convey the samephysical concept as we are used to in introductory physics using rectangular coordinates.
For a conservative system, Lagrange's equations are
d ( dL
dt \dq= 0
and, from Eq. (12.79),
d dLPk = dtdqk
Hence Lagrange's equations take the form
Pk =dL
(12.80)
(12.81)
(12.82)
Let us now see the connection between the generalized momenta and the constants of mo-tion. Quantities that are functions of the coordinates and velocities that remain constant in timeare called constants of motion. Suppose in the expression for the Lagrangian L of a system acertain coordinate qx does not occur explicitly. In such cases,
dL= 0 (12.83)
Therefore, Eq. (12.81) together with Eq. (12.82) takes the form
d(12.84)

Sec. 12.8 Hamiltonian Function: Conservation Laws and Symmetry Principles 489
which on integration yields
dLp k = —— = a constant = CA (12.85)
That is, whenever the Lagrangian function does not contain a coordinate qx explicitly, the cor-responding generalized momentum px is a constant of the motion. The coordinate qx is said tobe cyclic or ignorable. Thus we may conclude that the generalized momentum associated withan ignorable coordinate is a constant of motion of the system.
As an example, let us consider the motion of a particle in a central force field. In polar co-ordinates, the Lagrangian L is
L= T - V= \ rl9L) - V(r) (12.86)
Since L does not contain the coordinate 6, 6 is cyclic (or ignorable), and the generalized mo-mentum corresponding to 9 is
Pe = mr 8 = constant (12.87)
where pe is the angular momentum and is a constant of motion. A note of caution: pe is a con-stant of motion; it does not mean that 9 is constant. For example, in an elliptic orbit resultingfrom an inverse-square attractive force, 9 varies, but r also varies in such a way as to make pe
remain constant.
12.8 HAMILTONIAN FUNCTION: CONSERVATION LAWS ANDSYMMETRY PRINCIPLES
A system that does not interact with anything outside the system is called a closed system. Theremay or may not be any interactions between the particles of the closed system. In either case,for such a closed system there are always seven constants or integrals of motion: (1) the linearmomentum, which has three components, (2) the angular momentum, which also has three com-ponents, and (3) the total energy. In this section we shall investigate the process by which theseconstants are arrived at from the considerations of the Lagrangian of a closed system.
Conservation of Linear Momentum
Let us consider a Lagrangian of a closed system in an inertial reference frame. An outstandingproperty of an inertial system is that space is homogeneous in an inertial system or frame; thatis, a closed system is unaffected by a translation of the entire system in space. This implies thatthe Lagrangian of a closed system in an inertial frame remains unaffected or is invariant. Forsimplicity, let us co'nsider a single particle with a Lagrangian L(q, q). The variation in L due tothe variation in the generalized coordinates must be zero. That is, L is invariant:
oL = X oqk + X —— bqk = 0 (12.oo)

490 Lagrangian and Hamiltonian Dynamics Chap. 12
Since we are causing only the displacement of the system, 8qt are not functions of time; hence
and Eq. (12.88) reduces to
aCik
(12.89)
(12.90)
Each displacement 8qk is independent or arbitrary. Hence 8L in Eq. (12.90) will be zero only ifeach of the partial derivatives of L is zero; that is,
Thus Lagrange's equation, Eq. (12.80), reduces to
dt \dq= 0
HencedL
—r = constant
Since L = T(qk) — V(qk), we may write Eq. (12.93) as
dL d d
dqk dqk dqk= mqk = pk = constant
(12.91)
(12.92)
(12.93)
(12.94)
Equation (12.94) states that if space is homogeneous then the linear momentum pk of a closedsystem is constant. Since the motion of a single particle can be described by three Cartesian co-ordinates (or any other three generalized coordinates), there will be three constants of motion,px, py, and pz, which are the three components of a linear momentum vector p^. In more generalterms, we may make the following statement:
If the Lagrangian of a system, closed or otherwise, is invariant with respect to a transla-tion in a certain direction, then the linear momentum of the system in that direction is con-stant in time.
Conservation of Angular Momentum
Another outstanding property of an inertial system is that space is isotropic in an inertial frame;that is, a closed system is unaffected by the orientation or rotation of the entire system. This im-plies that the Lagrangian of a closed system remains invariant if the system is rotated throughan infinitesimal angle. Once again consider a system consisting of a single particle. The changein the Lagrangian as given by Eq. (12.88) is

Sec. 12.8 Hamiltonian Function: Conservation Laws and Symmetry Principles 491
By definition,
Pk =dL
(12.88)
(12.79)
Hence Lagrange's equations, Eq. (12.80), may be written as
p\ = y- (12-95>
Combining the preceding equations with Eq. (12.88), we may write
^ = 2 PkS<ik + 2 Pk 8<lk = 0 (12-96)k k
Let us apply these results to the case shown in Fig. 12.3. A point particle is at a distancer from the origin O. The system is rotated through an angle 86 about an axis. The value of rchanges so that
Sr = S6 x r
This leads to a change in velocity given by
8r = 8Q x r
(12.97)
(12.98)
Figure 12.3 Rotation about an axisOA of a point particle of mass m at adistance r from the origin O.

492 Lagrangian and Hamiltonian Dynamics Chap. 12
Applying Eq. (12.96) to this case, where pk = p and qk = r, we get (k = 1, 2, 3, the threecomponents of a vector)
8L = p • Sr + p • Sr = 0
Using Eqs. (12.97) and (12.98) in Eq. (12.99),
p • (SO x r) + p • (SO x r) = 0
From the properties of a scalar triple product, Eq. (12.100) takes the form
SO • (r x p) + SO • (r x p) = 0
or SO • [(r X p) + (r X p)] = 0
d-(rxp)) =or SO
\dtBut r X p = J
where J is the angular momentum about the given axis. Therefore,
dt
Since SO is arbitrary, we must have
dt= 0
That is, J = r X p = constant
where J has three components. In general:
(12.99)
(12.100)
(12.101)
(12.102)
(12.103)
(12.104)
(12.105)
(12.106)
(12.107)
If the Lagrangian remains invariant under rotation about an axis, then the angularmomentum of the system about this axis will remain constant in time.
Suppose a system is acted on by a force and has a symmetry about this force field. Thismeans that the Lagrangian of this system will be invariant about this axis of symmetry. Hencethe angular momentum J of the system about this axis will remain constant in time.
Conservation of Energy and the Hamiltonian Function
Still another outstanding property of an inertial frame is that the time is homogeneous within aninertial reference frame. This implies that the Lagrangian of a closed system cannot be an ex-plicit function of time. That is, in the total differential of L,
dL BL dL(12.108)

Sec. 12.8 Hamiltonian Function: Conservation Laws and Symmetry Principles 493
dLwe must have
dt= 0 (12.109)
Hence the total time derivative of L reduces to
dL -s-^ dL dqk dL dqk= 0
ordL
Itt
From Lagrange's equations,
dL .
d (dL
dL
dt \dqk
Substituting for dL/dqk in Eq. (12.110), we get
-̂ . d ( dL\ ^ dL ..
dL_
dak
(12.110)
(12.80)
dL
dt dqk
dL= 0
That is,
d_
dt(12.111)
Thus the quantity in parentheses must be constant in time. This constant is denoted by H, calledthe Hamiltonian H, and is given by [using the definition of generalized momentum inEq. (12.79)]
•r-, . dL - ^H = ZjikT^- L = 2uPkqk - L = constant
k d(ik k(12.112)
Hence H is a constant of motion ifL is not an explicit function of time t; that is, dLldt = 0. Htakes a special form if we make the following two assumptions:
(i) The potential energy V is independent of the velocity coordinate so that
dL d(T - V) dT(12.113)
(ii) If the equations representing the transformation of coordinates do not contain time ex-plicitly, then the kinetic energy T will not only be the quadratic function of the general-ized velocity, but will also be homogeneous in all its terms. [Caution: The transformationequations between the coordinates, say from a rectangular to generalized, will containtime explicitly if #'s are rotating with respect to the inertial coordinates (say rectangular)or if the constraints are functions of time.]

494 Lagrangian and Hamiltonian Dynamics Chap. 12
Now, according to Euler's theorem for a homogeneous function f(qh q2,. . . ,qk,. . ., qn)of order N in variables (qu q2, .. . ,qk,.. ., qn),
2 Ik = Nf (12.114)
Thus, if the kinetic energy T is a homogeneous quadratic function, that is, of the order N = 2,from Eq. (12.114) we get
k=\
Combining Eqs. (12.113) and (12.115) with Eq. (12.112), we obtain
H=2T-(T-V) = T+V = E = constant
(12.115)
(12.116)
where E is the total energy and is constant. That is, under the assumptions given above, (1) V =V{qk) and (2) T is a homogeneous quadratic function; the constant of motion, the HamiltonianH, is equal to the total energy E of the system. It is very important to keep in mind that H is notalways equal to E. The different possibilities are as follows:
H is constant and is equal to the total energy E.
H is constant but is not equal to the total energy E.
H is not constant but is equal to the total energy E.
H is not constant and is not equal to the total energy E.
The conservation laws derived here may be summarized as shown in Table 12.1. It is im-portant to note that the invariance of physical quantities results from the symmetry properties ofthe system and is not limited only to the three cases discussed. The preceding type of reasoningis frequently used in arriving at different conservation laws in modern theories of elementaryparticles and fields.
TABLE 12.1 SYMMETRY PROPERTIES AND CONSERVATION LAWS
Property ininertial frame Conserved quantity
Restrictions onLagrangian L
Homogeneous space
Isotropic spaceHomogeneous time
Linear momentum
Angular momentumTotal energy
L is invariant to translational;5L = 0
L is invariant to rotation; 8L = 0L is not an explicit function of
time t; dL/dt = 0

Sec. 12.9 Hamiltonian Dynamics: Hamilton's Equations of Motion 495
12.9 HAMILTONIAN DYNAMICS: HAMILTON'S EQUATIONSOF MOTION
Hamilton's equations of motion, also called the canonical equations of motion, will be derivedhere. The Lagrangian L is a function of generalized coordinates and generalized velocities andmay be an explicit function of time; that is,
L = L ( q u q 2 , . . . , q n ; q , , q 2 , . . . , q n ; t) (12.117)
The differential of L is
IL . dL .. \ dLdt (12.118)
k=\
Using the following relations, proved already by the definition of generalized momentum andthe Lagrange equation,
Pk = —- and ^h- = pk (12.119)
we obtain
• dqk+Pkdqk)+ — dt (12.120)of
Add qk dpk to both sides of this equation and, after rearranging, we get
= 1, (4kdpk - Pkdqk) - —dt (12.121)k=\ I 4=1 dt
As before, we define the Hamiltonian function H to be
n
H = ^ pkqk ~ L(qt, . . . , qk, q^, . . . , qk, t) (12.122)k=\
and Eq. (12.121) takes the form
dH=^ (qk dpk - pk dqk) - — dt (12.123)k=\ dt
Let us concentrate on Eq. (12.122) for a moment. L is an explicit function of (qh .. . ,qn;qx,. . ., qn\ t). In many cases it is possible to express H as an explicit function of (qu . . ., qn;Pu . .. , pn; t). This can be done by using the relation defining generalized momenta, that is,dL/dqk = pk, hence we can express qk in terms of pk. When this is possible, we can write
H = H(ql,...,qn;p1,...,Pn;t) (12.124)

496 Lagrangian and Hamiltonian Dynamics Chap. 12
That is, H is expressed as a function of the generalized coordinates, generalized momenta, andf. Thus, using Eq. (12.124), we may write the differential of H as
dH dH \ dHdpk)+ — dt
dp
Comparing Eqs. (12.125) and (12.123), we obtain
BH
(12.125)
(12.12S)
dH(12.127)
anddt dt
(12.128)
Substituting Eqs. (12.126) and (12.127) in Eq. (12.125) also yields dHldt = dH/dt. Equa-tions (12.126) and (12.127) are Hamilton's equations of motion; and because of their symmet-rical nature, they are also called canonical equations of motion. This procedure of describingmotion by these equations is called Hamilton's dynamics. These 2n first-order differential equa-tions are much easier to solve than the n second-order differential equations in Lagrangian for-malism. It must be clear from Eq. (12.127), that if any coordinate qx is ignorable (that is, it isnot contained in the Hamiltonian H) then the corresponding conjugate momentum pK is a con-stant of the motion.
Let us consider the case in which L, and hence H, do not contain time explicitly. In suchconditions, dH/dt = 0, and Eq. (12.125) reduces to
dH _ ^ (dH .
dt ~ hdH .
Using Hamilton's equations (12.126) and (12.127), we obtain
'dH dH dH d.
dtdtk=l
=l\dqkdpk
(12.129)
(12.130)
Hence H is a constant of motion if it does not contain t explicitly. Furthermore, as we showedearlier, H is identical to E, if (1) the equations describing the transformation of generalized co-ordinates do not contain time explicitly, and (2) the potential energy is not a function of the gen-eralized velocity.
y Example 12.7
A particle of mass m is attracted toward a given point by a force of magnitude klr2, where k is a constant.Derive an expression for the Hamiltonian and Hamilton's equations of motion.

Sec. 12.9 Hamiltonian Dynamics: Hamilton's Equations of Motion 497
Solution
Using plane polar coordinates (r, 6),
T = \ m(r2 + r2d2)
Therefore,
• = - f F . J r = [ U = - *J J r r
L = L(r, r,8) = T - V = - m(r2 + r2d2) + -2 r
r and 6 in Eq. (i) must be replaced by pr and pe by using Eq. (iii). That is,
dL prprpr = —r = mr or r = —
dLor (f =
i r / \ 2 / \
1 \ p \ . I p.,2 \\m) \rrir2) J 2m Imr2
Thus the kinetic energy in Eq. (i) may be written as
T =
Hence the Hamiltonian H becomes
The equations of motion can now be found from the canonical Eqs. (12.131) and (12.132):
dH dH— = ~Pk a n d T7 = Ik
The generalized coordinates are r, 0, pr, and pe. Thus
dr
—p'g = — = 0 or p0 = 0 or pe = constantda
. dH prr = — = — or p=mr
dpr m
dH Pa T *9 = = - ^ or pa = mr2d
dpe mr
(i)
(ii)
(iii)
(iv)
(v)
(vi)
(vii)
(viii)
(ix)
(x)
(xi)

498 Lagrangian and Hamiltonian Dynamics Chap. 12
Note that Eqs. (x) and (xi) duplicate Eqs. (iv) and (v), respectively, while Eq. (ix) (since H does not con-tain 8) gives the familiar constant of motion, pe = mr 8 — constant.
EXERCISE 12.7 Repeat the example in rectangular coordinates.
> Example 12.8
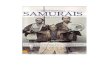
Describe the motion of a particle of mass m constrained to move on the surface of a cylinder of radius aand attracted toward the origin by a force that is proportional to the distance of the particle from the origin.
Solution
The motion of a particle of mass m in Fig. Ex. 12.8 may be described by the Cartesian coordinates x, y,and z or the cylindrical coordinates r, 6, and z. The equation of constraint is
x2 + y2 = a2 (i)
while the attractive force is
F = - A T (ii)
where k is the force constant and r2 = x2 + y2 + z2. Using cylindrical coordinates, the kinetic energy 7" is
T = \mv2 = \m(r2 + r282 + z2) (Hi)
Since in the present situation r = a, r = 0; hence
T = \m(a282 + z2) (iv)
Figure Ex. 12.8

Sec. 12.9 Hamiltonian Dynamics: Hamilton's Equations of Motion
while the potential energy is given by, using Eq. (i),
\kr2 = \hV = \kr2 = \k(x2 + y2 + z2) = \k(a2 + z1)
Therefore,
L = L(z, 8,z) = T-V= \m(a282 + z2) - \k
We have to replace 8 and z by pe and pr Thus
dL .• pape = -^ = ma28 or 6 = J~
dd ma
Substituting these in Eq. (iv),
Therefore,
dL
dz
r X \ 2(Pe2 I \ma2
or z =m
m 2ma 2m
499
(v)
(vi)
(vii)
(viii)
(ix)
where we have dropped the constant term \ ka2. Thus, using the canonical equations,
dH . dH— = -pk and — = qkd4k dPk
and the generalized coordinates z, 8, pv and pe, we obtain
. dH pzz = — = — or p — mz
dpz m
dH Pf, . •8 = — = - ^ or pH = ma28
dpe ma
dH .-pz = — =kz or pz= -kz
dH—pe = — = 0 or pe = 0 or pe = constant
TO
Combining Eqs. (x) and (xii), we get
mz + kz = 0
(x)
(xi)
(xii)
(xiii)
(xiv)
which states that the motion of the particle in the Z direction is simple harmonic with the frequencygiven by
(xv)

500 Lagrangian and Hamiltonian Dynamics Chap. 12
while from Eqs. (xi) and (xiii) we obtain
pe = constant = ma (xvi)
That is, the angular momentum about the Z-axis is a constant of motion, as it should be, since the Z-axisis the axis of symmetry.
EXERCISE 12.8 Repeat the example of a sliding mass (Example 12.5) using Hamilton's dynamics byfinding the cyclic coordinate and the constant of motion.
PROBLEMS
12.1. Write the Lagrangian and derive the equations of motion for the four systems shown in Fig. P12.1.(a) A particle of mass m is shot vertically upward in a uniform gravitational field, (b) A mass mtied to a spring of spring constant k is allowed to vibrate vertically in a uniform gravitational field,(c) A simple pendulum swinging in a vertical plane, (d) A uniform rod of mass m and length L piv-oted at O, at a distance h from the center of mass, swings in a vertical plane in a uniform gravita-tional field.
w = mg
X m
CM
(a) (b) (c) (d)
Figure P12.1
12.2. A uniform rod of mass M, length L, and radius R rolls without slipping (translates as well as ro-tates) on a horizontal plane under the action of a horizontal force F applied at its center, as shownin Fig. P12.2. Derive Lagrange's equations of motion.

Problems 501
Figure P12.2
12.3. Two identical masses are tied to two identical springs as shown in Fig. P12.3 and move on a smoothhorizontal plane. Derive the equations of motion for the system by using Lagrange's method.
7///////////////////////////////////,Figure P12.3
12.4. A particle of mass m moves on the outer surface of a hoop of radius R, as shown in Fig. P12.4.Determine the position of the mass as a function of time t. At what point does the particle leavethe hoop?
Figure P12.4
12.5. Two masses ml and m2 connected by a massless string of length / are allowed to slide on two fric-tionless inclined planes under the influence of gravity, as shown in Fig. P12.5. Write an expressionfor the generalized force using (a) / as the generalized coordinate, and (b) /[ as the generalizedcoordinate. Under what conditions will the system be in equilibrium? Find this position ofequilibrium.
Y k
Figure P12.5

502 Lagrangian and Hamiltonian Dynamics Chap. 12
12.6. A point mass m is constrained to move on a circle of radius R and acted on by a force F, as shownin Fig. PI2.6. Calculate the generalized force and the virtual work done considering (a) s as a gen-eralized coordinate, and (b) d as a generalized coordinate.
Figure P12.6
12.7. An oscillating pendulum, as shown in Fig. P12.7, consists of a mass m attached to a massless springof spring constant k and of relaxed length Zo. Find Lagrange's equations of motion. Under whatconditions will this system reduce to (a) a simple pendulum, and (b) a linear harmonic oscillator?
Figure P12.7
12.8. A point mass m slides down a wedge of mass M, as shown in Fig. P12.8. The wedge slides on africtionless surface with velocity v. Write Lagrange's equations for the system if (a) the wedge isan inclined plane, and (b) the surface of the wedge is a quadrant of a circle of radius R.
M
M/////////////////////////////////////////// '/////////////////////////////A
(a) (b)
Figure P12.8

Problems 503
12.9. (a) Consider a particle of mass m subject to a force with spherical components Fn Fg, and F$. Setup Lagrange's equations of motion for the particle in spherical coordinates r, 6 and <f>.
(b) Find the equations of motion for the particle in part (a) if the system in spherical coordinatesis rotating with an angular velocity &> about the Z-axis. Can you identify the generalized cen-trifugal and Coriolis forces by comparing the results in part (a)?
12.10. The point of support of a simple pendulum of length / is being elevated at constant acceleration a.Find the time period.
12.11. Two masses m and M are connected by a light inextensible string, as shown in Fig. P12.ll . Ifthe surface is frictionless, set up the equations of motion and find the acceleration of thesystem.
Figure P12.ll
12.12. A particle of mass m slides on a smooth inclined plane whose inclination angle 6 is increasing ata constant rate u>, starting from d = 0, at t = 0. Write equations describing the subsequent motionof the particle.
12.13. A uniform rod of length L and mass M is pivoted at O and can swing in a vertical plane(Fig. P12.13). The other end of the rod is pivoted to the center of a thin disk of mass M and radiusR. (The rod swings, while the disk swings as well as rotates.) Using Lagrange's equations, derivethe equations of motion for the system and describe the motion.
Figure P12.13

504 Lagrangian and Hamiltonian Dynamics Chap. 12
12.14. Using Lagrange's equations, derive the equations of motion of the planar double pendulum shownin Fig. PI 2.14. Assume the amplitude of the oscillations to be very small.
Figure P12.14
12.15. Discuss the double-pendulum problem for the special cases (a) m, > m2, and (b) ml < m2.
12.16. Analyze the motion of a spherical pendulum by using Lagrange's equations. Use the coordinatesR, 6, and 4> as shown in Fig. P12.16.
z I
A spherical pendulumis a simple pendulumthat is free to swingthe entire solid angle.
Figure P12.16
12.17. Two point masses ml and m2 are connected by a massless cord of length / that passes through a holein a horizontal table (Fig. P12.17). Mass m, moves without friction on the table top in a circular

Problems 505
path, while mass m2 oscillates as a bob of a simple pendulum. Set up and solve Lagrange's equa-tions of motion. Solve these equations for different accelerations and also calculate the frequencyof the oscillations.
in,
Figure P12.17
12.18. In Problem 12.17, if masses m1 and m2 simply move in horizontal and vertical straight lines in auniform gravitational field, set up and solve Lagrange's equations.
12.19. The elliptical coordinates (u, v) of a point mass m are defined by
u = A cosh u cos v and y = A sinh u sin v
where A is a constant. Calculate the kinetic energy of the particle and its Lagrange's equations.
12.20. Suppose the coordinate transformations between the Cartesian coordinates and plane polar coor-dinates contain time explicitly given by
x = r cos 6 + vt and y = r sin 6 + at2
where v and a are constants. Show that the kinetic energy in plane polar coordinates is not a ho-mogeneous quadratic function of the velocities r and 8. Find Lagrange's equations of motion.
12.21. The coordinates (u, v) are related to the plane polar coordinates (r, 6) by
u = In - - 6 cot d> and v = In - - 6 tan d>a a
where a and <t> are constants. Calculate the kinetic energy of a particle of mass m in terms of thecoordinates u and v. Calculate the forces Qu and Qv. Solve the equations of motion.
12.22. Double Atwood machine: Consider a system of masses and pulleys as shown in Fig. P12.22.Masses m^ and m2 are suspended from a string of length l{, and m3 and m4 are suspended by a stringof length l2. Pulleys A and B are hung from the ends of a string of length /3 over a third fixed pul-ley C. Set up Lagrange's equations, and find the accelerations and the tensions in the strings. Findthe acceleration if mx = m, m2
= 2m, m3 = 3m, and m4 = Am.

506 Lagrangian and Hamiltonian Dynamics Chap. 12
Figure P12.22
12.23. A ladder of mass M and length L rests against a smooth wall and makes an angle 6 with the floor.The ladder starts sliding both on the floor and the wall. Set up Lagrange's equations of motion, as-suming the ladder remains in contact with the wall. At what angle will the ladder leave the wall?
12.24. A mass m is suspended by a string of length / from a support S and oscillates as a pendulum ina vertical plane containing the X-axis and making an angle 6 with the vertical, as shown inFig. P12.24. The support S slides back and forth along a horizontal X-axis according to the equa-tion x = a cos (xit. Set up Lagrange's equations. Show that for small values of 6 the system behavesas a forced harmonic oscillator.
Figure P12.24

Problems 507
12.25. By using Lagrange's method, calculate the acceleration of a solid sphere rolling down a perfectlyrough inclined plane at an angle 6 with the horizontal.
12.26. Show that Lagrange's method yields the correct equations of motion for a particle moving in aplane in a rotating coordinate system OX'Y'.
12.27. A particle of mass m is confined to move on the inside surface of a smooth cone of half-angle a.The vertex is at the origin and the axis of the cone is vertical. What is the angular velocity u> of theparticle so that it can describe a horizontal circle at a height h above the vertex?
12.28. A hoop of mass m and radius r rolls without slipping down an inclined plane of mass M with anangle of inclination 4>. The plane slides without friction on the horizontal surface. Find and solveLagrange's equations for the system.
12.29. Two masses mx and m2 are connected by a string of length I. One mass is placed on a smooth hor-izontal surface, while the other mass hangs over the side after the string passes over a solid pulleyof mass M and radius R. Find the Lagrangian and the equations of motion.
12.30. A bead of mass m subject to no external force is constrained to move on a straight wire rotating atconstant angular velocity about an axis through O and perpendicular to the wire (Fig. PI 2.30). Us-ing Lagrange's equations, set up the equations of motion in both Cartesian and polar coordinates.Calculate the constraining force.
Axis Figure P12.30
12.31. Consider a smooth wire bent so as to form a helix, the equations of which, in cylindrical coordi-nates, are z = k6 and r = a, where k and a are constants. The origin is the center of an attractiveforce that varies directly with distance. By using Lagrange's equations, discuss the motion of abead that is free to slide.
12.32. In Problem 12.31, find the components of the reaction of the wire in the r, d, and z directions.
12.33. A small sphere of mass m and radius r slides down a smooth stationary large sphere of radius Runder the action of gravity from a position of rest at the top. Use Lagrange's equations to find thereaction of the sphere on the particle at any value 6, 9 being the angle between the vertical diam-eter of the sphere and the normal to the sphere that passes through the particle. Find the value of 0at which the particle falls off.
12.34. A particle of mass m is constrained to move along a smooth wire bent into the form of a horizon-tal circle of radius a. Initially, the particle has a velocity v0. The motion is subject to air resistanceproportional to the square of the velocity. Using Lagrange's method, find the angular position ofthe particle as a function of time. Calculate the reaction of the wire on the particle. Ignore the ef-fect of gravity.

508 Lagrangian and Hamiltonian Dynamics Chap. 12
12.35. In Problem 12.34, if the wire is rough and the coefficient of friction is fi, what will be the resultantreaction of the wire on the particle?
12.36. Write Hamilton's equations for a point mass moving in a straight line.
12.37. Two masses ml and m2 are attached to the ends of a massless spring of spring constant k and re-laxed length l0. The system oscillates and rotates in a plane but moves freely through space.
(a) Find the number of degrees of freedom.
(b) Derive Hamilton's equations.
(c) Identify the cyclic coordinates and state the corresponding conservation laws.
12.38. Derive Hamilton's equations for the oscillating pendulum in Problem 12.1(b) (mass-springpendulum).
12.39. A point mass m is subjected to a central isotropic force. Using plane polar coordinates, comparethe Hamiltonian H of this point mass relative to a reference frame S fixed in space with the Hamil-tonian H' of the same point mass relative to frame S' rotating about the force center with constantangular speed a)(4>' = <j> — <w).
12.40. For Problem 12.39, set up Hamilton's equations for the particle in terms of r' and d'. Also writethese equations in terms of r and 6.
12.41. Set up and solve Hamilton's canonical equations for (a) a projectile in two dimensions and (b) asimple pendulum.
12.42. Using Hamilton's method, derive an expression that describes the motion of a particle executingsimple harmonic motion.
12.43. Write the Hamiltonian of a simple pendulum and derive its equation of motion.
12.44. Find Hamilton's equations for a harmonic oscillator for which V = \kx2 + \ ex4, where k and e areconstants.
12.45. A particle of mass m moves under the influence of gravity along the spiral z = k6, r = a, where kand a are constants and Z is the vertical axis. Obtain Hamilton's equations of motion.
12.46. A pendulum of mass m and length I is suspended from a car of mass M that moves with velocity von a frictionless horizontal overhead rail. The pendulum swings only in the vertical plane contain-ing the rail.
(a) Set up the Lagrangian L and the Hamiltonian H.
(b) Show that there is one cyclic (ignorable) coordinate. Eliminate this coordinate and discuss themotion.
12.47. A mass m tied to a vertical spring of spring constant k and vertical length l0 has a constant upwardacceleration a0. The acceleration due to gravity is g. Find the Lagrangian and the equations of mo-tion. Calculate the Hamiltonian function, and write Hamilton's equations. What is the time periodof the motion?
12.48. A particle of mass m moves in a central field attractive force of magnitude [k/r2]e~al, where k anda are constants. Find the Lagrangian and Hamiltonian functions. Obtain Hamilton equations ofmotion. Is H constant? Is H the total energy?
12.49. A mass m is suspended by means of a string of length L that passes through a hole in a table. Thestring is pulled up at a constant rate k (cm/s); that is, dLldt = —k. The suspension point remainsconstant, and the mass oscillates as a pendulum. Calculate the Lagrangian and Hamiltonian func-tions. Compare the Hamiltonian and the total energy, and discuss the conservation of energy forthe system. Is it a constant of motion? Is it the total energy? Obtain Hamilton's equations of motion.

Suggestions for Further Reading
12.50. A particle of mass m moves in one dimension under the influence of a force
509
where k and T are positive constants. Calculate the Lagrangian and Hamiltonian functions. Is theHamiltonian a constant of motion? Is it the total energy? Derive and solve the equations of motion.
SUGGESTIONS FOR FURTHER READING
ARTHUR, W., andFENSTER, S. K., Mechanics, Chapter 14. New York: Holt, Rinehart and Winston, Inc., 1969.
BECKER, R. A., Introductionto Theoretical Mechanics, Chapter 13. New York: McGraw-Hill Book Co., 1954.
CORBEN, H. C , and STEHLE, P., Classical Mechanics, Chapters 6,7, and 10. New York: John Wiley & Sons,Inc., 1960.
DAVIS, A. DOUGLAS, Classical Mechanics, Chapter 10. New York: Academic Press, Inc., 1986.
FOWLES, G. R., Analytical Mechanics, Chapter 10. New York: Holt, Rinehart and Winston, Inc., 1962.
*GOLDSTEIN, H., Classical Mechanics, 2nd ed., Chapters 1 and 2. Reading, Mass.: Addison-Wesley Pub-lishing Co., 1980.
HAUSER, W., Introduction to the Principles of Mechanics, Chapters 5 and 6. Reading, Mass.: Addison-Wesley Publishing Co., 1965.
MARION, J. B., Classical Dynamics, 2nd ed., Chapters 6 and 7. New York: Academic Press, Inc., 1970.
*MOORE, E. N., Theoretical Mechanics, Chapters 2 and 3. New York: John Wiley & Sons, Inc., 1983.
ROSSBERG, K., Analytical Mechanics, Chapter 8. New York: John Wiley & Sons, Inc., 1983.
SLATER, J. C , Mechanics, Chapter 4. New York: McGraw-Hill Book Co., 1947.
SOMMERFELD, A., Mechanics, Chapters 2 and 6. New York: Academic Press. Inc., 1952.
STEPHENSON, R. J., Mechanics and Properties of Matter, Chapter 7. New York: John Wiley & Sons, Inc., 1962.
SYMON, K. R., Mechanics, 3rd ed., Chapter 9. Reading, Mass.: Addison-Wesley Publishing Co., 1971.
SYNGE, J. L., and GRIFFITH, B. A., Principles of Mechanics, Chapter 15. New York: McGraw-Hill BookCo., 1959.
*The asterisk indicates works of an advanced nature.