Embed Size (px)
Citation preview

Generalized coverage problems:approximation through game design
Dario PaccagnanJoint work with J. R. Marden (UCSB)

Combinatorial resource allocation
. a set of resources
. a set of agents
Goal: assign resources to agents to maximize a given welfare function
About 548.000.000 results (0,59 seconds)
SponsoredShop for running shoes
Hoka One One -Speed Goat 2 ...CHF 99,33€ 86,03mrporter.comBy Google
BROOKSRunningschuh ...CHF 159,00intersport.chFree shippingBy Google
Hoka One One -Mach Mesh ...CHF 99,33€ 86,03mrporter.comBy Google
ROA - ObliqueRippy Mesh- ...CHF 259,04€ 224,35mrporter.comBy Google
Gucci, Platformsneakers - ...CHF 840,00mytheresa.com/...Free shippingBy Google
Running Shoes - Runner's Worldhttps://www.runnersworld.com/running-shoes/Black Running Shoes You'll Want to Wear On the Run and Beyond. Black is always in style, and thesekicks combine top-notch performance with street-savvy ...The Best Running Shoes · The 7 Best Running Shoes ... · Pronation, Explained
More places
Rating Hours
Och Sport4.1 (44) · Running StoreBahnhofstrasse 56 · 044 215 21 21Open ⋅ Closes 7PM
On AG3.5 (8) · ManufacturerPfingstweidstrasse 106 · 044 225 15 55
"Best running company in the world based in Zurich!"
Ochsner Shoes4.3 (6) · Shoe ShopShoes & trainers for adults & childrenStadelhoferstrasse 8 · 044 252 50 77Open ⋅ Closes 8PM
On | Schweizer Performance Laufschuhe & Bekleidung - On Runninghttps://www.on-running.com/en-ch/Test shoes or Performance Running Gear commitment free. Love them ... Your perfect partner in theworld's lightest fully-cushioned shoe for Running Remixed.
Mens Running Shoes & Running Clothing for Men | Onhttps://www.on-running.com/en-ch/t/mensShop On's collection of men's running shoes & running clothes. Made with innovative technology forunparalleled comfort. Free shipping & returns.
Men's Running Shoes | Running Warehousehttps://www.runningwarehouse.com/mens-running-shoes.htmlFind your favorite running shoes at Running Warehouse! Huge selection and top-rated customerservice. Free 2 day shipping & free returns on all orders.
Top Men's Running Shoes | Road Runner Sportshttps://www.roadrunnersports.com/rrs/mensshoes/mensshoesrunning/Welcome to our premium collection of men's running shoes where you can browse through a selectionfrom the best brands and top styles available on the ...
Running | Clothing, Shoes, Trainers | Accessories, Watches ...https://www.sportsdirect.com/runningBuy all your running kit including men's and ladies running shoes, clothes and accessories from worldleading brands like Nike and Karrimor. Order today!
616 Best Running Shoes (June 2018) | RunRepeathttps://runrepeat.com/ranking/rankings-of-running-shoesAll 618 running shoes ranked by the best – based on reviews from 2351 experts & runners. Theultimate list. Updated June 2018!
Men's Running Shoes. Nike.comhttps://store.nike.com/us/en_us/pw/mens-running-shoes/7puZ8yzZoi3Dominate your run and find the right fit for your running style with the latest men's running shoes fromNike. Enjoy free shipping and returns with NikePlus.
Shoe
Sneakers are shoes primarily designed for sports or other forms ofphysical exercise, but which are now also often used for everyday wear.Wikipedia
Usage: Running
Product type: Shoe
People also search for
Sneakers
View 10+ more
Shoe Boot Footwear Clothing Sandal
Feedback
All Images Maps Shopping News More Settings Tools
running shoes Sign in
running shoes - Google Search https://www.google.com/search?client=firefox-b&ei=YYojW-...
1 of 2 15.06.18, 11:45
2

Combinatorial resource allocation
. a set of resources
. a set of agents
Goal: assign resources to agents to maximize a given welfare function
About 548.000.000 results (0,59 seconds)
SponsoredShop for running shoes
Hoka One One -Speed Goat 2 ...CHF 99,33€ 86,03mrporter.comBy Google
BROOKSRunningschuh ...CHF 159,00intersport.chFree shippingBy Google
Hoka One One -Mach Mesh ...CHF 99,33€ 86,03mrporter.comBy Google
ROA - ObliqueRippy Mesh- ...CHF 259,04€ 224,35mrporter.comBy Google
Gucci, Platformsneakers - ...CHF 840,00mytheresa.com/...Free shippingBy Google
Running Shoes - Runner's Worldhttps://www.runnersworld.com/running-shoes/Black Running Shoes You'll Want to Wear On the Run and Beyond. Black is always in style, and thesekicks combine top-notch performance with street-savvy ...The Best Running Shoes · The 7 Best Running Shoes ... · Pronation, Explained
More places
Rating Hours
Och Sport4.1 (44) · Running StoreBahnhofstrasse 56 · 044 215 21 21Open ⋅ Closes 7PM
On AG3.5 (8) · ManufacturerPfingstweidstrasse 106 · 044 225 15 55
"Best running company in the world based in Zurich!"
Ochsner Shoes4.3 (6) · Shoe ShopShoes & trainers for adults & childrenStadelhoferstrasse 8 · 044 252 50 77Open ⋅ Closes 8PM
On | Schweizer Performance Laufschuhe & Bekleidung - On Runninghttps://www.on-running.com/en-ch/Test shoes or Performance Running Gear commitment free. Love them ... Your perfect partner in theworld's lightest fully-cushioned shoe for Running Remixed.
Mens Running Shoes & Running Clothing for Men | Onhttps://www.on-running.com/en-ch/t/mensShop On's collection of men's running shoes & running clothes. Made with innovative technology forunparalleled comfort. Free shipping & returns.
Men's Running Shoes | Running Warehousehttps://www.runningwarehouse.com/mens-running-shoes.htmlFind your favorite running shoes at Running Warehouse! Huge selection and top-rated customerservice. Free 2 day shipping & free returns on all orders.
Top Men's Running Shoes | Road Runner Sportshttps://www.roadrunnersports.com/rrs/mensshoes/mensshoesrunning/Welcome to our premium collection of men's running shoes where you can browse through a selectionfrom the best brands and top styles available on the ...
Running | Clothing, Shoes, Trainers | Accessories, Watches ...https://www.sportsdirect.com/runningBuy all your running kit including men's and ladies running shoes, clothes and accessories from worldleading brands like Nike and Karrimor. Order today!
616 Best Running Shoes (June 2018) | RunRepeathttps://runrepeat.com/ranking/rankings-of-running-shoesAll 618 running shoes ranked by the best – based on reviews from 2351 experts & runners. Theultimate list. Updated June 2018!
Men's Running Shoes. Nike.comhttps://store.nike.com/us/en_us/pw/mens-running-shoes/7puZ8yzZoi3Dominate your run and find the right fit for your running style with the latest men's running shoes fromNike. Enjoy free shipping and returns with NikePlus.
Shoe
Sneakers are shoes primarily designed for sports or other forms ofphysical exercise, but which are now also often used for everyday wear.Wikipedia
Usage: Running
Product type: Shoe
People also search for
Sneakers
View 10+ more
Shoe Boot Footwear Clothing Sandal
Feedback
All Images Maps Shopping News More Settings Tools
running shoes Sign in
running shoes - Google Search https://www.google.com/search?client=firefox-b&ei=YYojW-...
1 of 2 15.06.18, 11:45
2

Combinatorial resource allocation
. a set of resources
. a set of agents
Goal: assign resources to agents to maximize a given welfare function
About 548.000.000 results (0,59 seconds)
SponsoredShop for running shoes
Hoka One One -Speed Goat 2 ...CHF 99,33€ 86,03mrporter.comBy Google
BROOKSRunningschuh ...CHF 159,00intersport.chFree shippingBy Google
Hoka One One -Mach Mesh ...CHF 99,33€ 86,03mrporter.comBy Google
ROA - ObliqueRippy Mesh- ...CHF 259,04€ 224,35mrporter.comBy Google
Gucci, Platformsneakers - ...CHF 840,00mytheresa.com/...Free shippingBy Google
Running Shoes - Runner's Worldhttps://www.runnersworld.com/running-shoes/Black Running Shoes You'll Want to Wear On the Run and Beyond. Black is always in style, and thesekicks combine top-notch performance with street-savvy ...The Best Running Shoes · The 7 Best Running Shoes ... · Pronation, Explained
More places
Rating Hours
Och Sport4.1 (44) · Running StoreBahnhofstrasse 56 · 044 215 21 21Open ⋅ Closes 7PM
On AG3.5 (8) · ManufacturerPfingstweidstrasse 106 · 044 225 15 55
"Best running company in the world based in Zurich!"
Ochsner Shoes4.3 (6) · Shoe ShopShoes & trainers for adults & childrenStadelhoferstrasse 8 · 044 252 50 77Open ⋅ Closes 8PM
On | Schweizer Performance Laufschuhe & Bekleidung - On Runninghttps://www.on-running.com/en-ch/Test shoes or Performance Running Gear commitment free. Love them ... Your perfect partner in theworld's lightest fully-cushioned shoe for Running Remixed.
Mens Running Shoes & Running Clothing for Men | Onhttps://www.on-running.com/en-ch/t/mensShop On's collection of men's running shoes & running clothes. Made with innovative technology forunparalleled comfort. Free shipping & returns.
Men's Running Shoes | Running Warehousehttps://www.runningwarehouse.com/mens-running-shoes.htmlFind your favorite running shoes at Running Warehouse! Huge selection and top-rated customerservice. Free 2 day shipping & free returns on all orders.
Top Men's Running Shoes | Road Runner Sportshttps://www.roadrunnersports.com/rrs/mensshoes/mensshoesrunning/Welcome to our premium collection of men's running shoes where you can browse through a selectionfrom the best brands and top styles available on the ...
Running | Clothing, Shoes, Trainers | Accessories, Watches ...https://www.sportsdirect.com/runningBuy all your running kit including men's and ladies running shoes, clothes and accessories from worldleading brands like Nike and Karrimor. Order today!
616 Best Running Shoes (June 2018) | RunRepeathttps://runrepeat.com/ranking/rankings-of-running-shoesAll 618 running shoes ranked by the best – based on reviews from 2351 experts & runners. Theultimate list. Updated June 2018!
Men's Running Shoes. Nike.comhttps://store.nike.com/us/en_us/pw/mens-running-shoes/7puZ8yzZoi3Dominate your run and find the right fit for your running style with the latest men's running shoes fromNike. Enjoy free shipping and returns with NikePlus.
Shoe
Sneakers are shoes primarily designed for sports or other forms ofphysical exercise, but which are now also often used for everyday wear.Wikipedia
Usage: Running
Product type: Shoe
People also search for
Sneakers
View 10+ more
Shoe Boot Footwear Clothing Sandal
Feedback
All Images Maps Shopping News More Settings Tools
running shoes Sign in
running shoes - Google Search https://www.google.com/search?client=firefox-b&ei=YYojW-...
1 of 2 15.06.18, 11:45
2

Combinatorial resource allocation
. a set of resources
. a set of agents
Goal: assign resources to agents to maximize a given welfare function
About 548.000.000 results (0,59 seconds)
SponsoredShop for running shoes
Hoka One One -Speed Goat 2 ...CHF 99,33€ 86,03mrporter.comBy Google
BROOKSRunningschuh ...CHF 159,00intersport.chFree shippingBy Google
Hoka One One -Mach Mesh ...CHF 99,33€ 86,03mrporter.comBy Google
ROA - ObliqueRippy Mesh- ...CHF 259,04€ 224,35mrporter.comBy Google
Gucci, Platformsneakers - ...CHF 840,00mytheresa.com/...Free shippingBy Google
Running Shoes - Runner's Worldhttps://www.runnersworld.com/running-shoes/Black Running Shoes You'll Want to Wear On the Run and Beyond. Black is always in style, and thesekicks combine top-notch performance with street-savvy ...The Best Running Shoes · The 7 Best Running Shoes ... · Pronation, Explained
More places
Rating Hours
Och Sport4.1 (44) · Running StoreBahnhofstrasse 56 · 044 215 21 21Open ⋅ Closes 7PM
On AG3.5 (8) · ManufacturerPfingstweidstrasse 106 · 044 225 15 55
"Best running company in the world based in Zurich!"
Ochsner Shoes4.3 (6) · Shoe ShopShoes & trainers for adults & childrenStadelhoferstrasse 8 · 044 252 50 77Open ⋅ Closes 8PM
On | Schweizer Performance Laufschuhe & Bekleidung - On Runninghttps://www.on-running.com/en-ch/Test shoes or Performance Running Gear commitment free. Love them ... Your perfect partner in theworld's lightest fully-cushioned shoe for Running Remixed.
Mens Running Shoes & Running Clothing for Men | Onhttps://www.on-running.com/en-ch/t/mensShop On's collection of men's running shoes & running clothes. Made with innovative technology forunparalleled comfort. Free shipping & returns.
Men's Running Shoes | Running Warehousehttps://www.runningwarehouse.com/mens-running-shoes.htmlFind your favorite running shoes at Running Warehouse! Huge selection and top-rated customerservice. Free 2 day shipping & free returns on all orders.
Top Men's Running Shoes | Road Runner Sportshttps://www.roadrunnersports.com/rrs/mensshoes/mensshoesrunning/Welcome to our premium collection of men's running shoes where you can browse through a selectionfrom the best brands and top styles available on the ...
Running | Clothing, Shoes, Trainers | Accessories, Watches ...https://www.sportsdirect.com/runningBuy all your running kit including men's and ladies running shoes, clothes and accessories from worldleading brands like Nike and Karrimor. Order today!
616 Best Running Shoes (June 2018) | RunRepeathttps://runrepeat.com/ranking/rankings-of-running-shoesAll 618 running shoes ranked by the best – based on reviews from 2351 experts & runners. Theultimate list. Updated June 2018!
Men's Running Shoes. Nike.comhttps://store.nike.com/us/en_us/pw/mens-running-shoes/7puZ8yzZoi3Dominate your run and find the right fit for your running style with the latest men's running shoes fromNike. Enjoy free shipping and returns with NikePlus.
Shoe
Sneakers are shoes primarily designed for sports or other forms ofphysical exercise, but which are now also often used for everyday wear.Wikipedia
Usage: Running
Product type: Shoe
People also search for
Sneakers
View 10+ more
Shoe Boot Footwear Clothing Sandal
Feedback
All Images Maps Shopping News More Settings Tools
running shoes Sign in
running shoes - Google Search https://www.google.com/search?client=firefox-b&ei=YYojW-...
1 of 2 15.06.18, 11:45
2

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5
. no constraints on wr (j)

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5
. no constraints on wr (j)typically concave

Generalized Multiagent Maximum Coverage (GMMC)
resources: r ∈ R, vr ≥ 0
agents: i ∈ {1, . . . , n}
allocations: ai ∈ Ai ⊆ 2R
welfare: W (a) =∑
r∈∪iai
vrwr (|a|r ) wr : N→ R≥0
System-level objective: maxa∈AW (a)
1 2 3 4 5
12345
j
wr (j)
3
v1
v2
v3
v4
v5
. no constraints on wr (j)typically concave
. to ease the presentationwr (j) = w(j)

Connection with Coverage problems
GMMC problem
- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover
- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem
- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover
- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R
- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover
- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover
- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover
- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover
- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover- set of weighted resources: R
- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09
4

Connection with Coverage problems
GMMC problem- set of weighted resources: R- n collections of sets: {Ai}ni=1 ⊆ 2R
- choose one set per collection to max
W (a) =∑
r∈∪iai
vrw(|a|r )
Max-n-cover- set of weighted resources: R- one collection of sets: A ⊆ 2R
- choose n sets from collection to max
W (a) =∑
r∈∪iai
vr
. GMMC subsumes max-n-cover (set w(j) ≡ 1, Ai = Aj for all i , j)
. GMMC subsumes [Che04],[Gair09] (set w(j) ≡ 1)
[Che04] C. Chekuri et al. “Maximum Coverage Problem with Group Budget Constraints and Applications”, APPROX 04
[Gair09] M. Gairing, “Covering Games: Approximation through Non-cooperation”, WINE 09 4

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:
- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?
- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation?
Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

Facts: hardness and approximability
max-n-cover problem:
. NP-hard
. NP-hard to approximate within any ratio better than 1− 1/e
. Poly-algorithms achieve 1− 1/e
GMMC problem:
. NP-hard
. If w is concave and Ai = Aj , best poly-algorithm achieves 1− c/eand is centralized, c = 1− (w(n)− w(n − 1))
Issues:- distributedness?- best possible approximation? Ai 6= Aj , w not concave?
[Svir17] M. Sviridenko, J. Vondrak, J. Ward, “Optimal Approximation for Submodular and Supermodular Optimization withBounded Curvature”, MOR 17
5

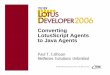
Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:
distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed
, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient
, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
1− c/e
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
GT-approach
1− c/e
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
GT-approach
1− c/e
max-n-cover
1− 1e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
GT-approach
1− c/e
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Main result
Game theory can be used to produce algorithms that are:distributed, efficient, match/improve existing approximations
Example: - # agents ≤ 40- w(j) = jd , d varies in [0, 1]
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
approx.
w(j) = jd , 40 agents
GT-approach
1− c/e
max-n-cover1− 1
e
6
[Pac18a] DP, R.Chandan, J. Marden “Distributed resource allocation through utility design-Part I: optimizing the performance certificates via the price of anarchy”, ArXiv 2018
[Pac18b] DP, J. Marden “- Part II: applications to submodular, supermodular and set covering problems”, ArXiv 2018

Outline
1. Introduction
2. Game-design approach
3. Characterizing the price of anarchy
4. Optimizing the price of anarchy
5. Conclusions and Outlook
7

The game-theoretic approach
Game design
8

maxW (a)
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime

maxW (a)
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime
utilities

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime
utilitiesgame

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime
utilitiesgame
equilibria

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime
utilitiesgame
equilibria

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime
utilitiesgame
equilibria

maxW (a)
Design a game(agents, constraints, utilities)
Requirement:equilibria have high welfare
Use existing algorithms tofind an equilibrium
The game-theoretic approach
Game design
8
. Distributed algorithm
. Good approximation
. Polytime
utilitiesgame
equilibria

Utility design and approximation ratio
ui (ai , a−i )
=∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ?
Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f
→ game Gf = {I, f } → NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f }
→ NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) =
infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) = infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design and approximation ratio
ui (ai , a−i ) =∑r∈ai
vrw(|a|r )f (|a|r ) f : N→ R≥0 (distributed)
How to design f ? Maximize worst-case performance
Given instance I, fix f → game Gf = {I, f } → NE(Gf )
PoA(f ) = infGf : #agents ≤n
mina∈NE(Gf ) W (a)
W (aopt)≤ 1
PoA(f ) is the approx. ratio of any equilibrium-computing algorithm
9

Utility design reduces to
Given f , characterize or bound PoA(f )
Find f with highest PoA(f )
10

Utility design reduces to
Given f , characterize or bound PoA(f )
Find f with highest PoA(f )
10

Utility design reduces to
Given f , characterize or bound PoA(f )
Find f with highest PoA(f )
10

Utility design reduces to
Given f , characterize or bound PoA(f )
Find f with highest PoA(f )
10

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)
- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Characterizing the price of anarchy
The quantity we wish to compute: PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (aopt)
)- well studied in game theory
- difficult to compute
- bounds are available in special cases
- bounds do not explicitly depend on f
- smoothness not applicable
- tightness?
Theorem (Characterization of PoA(f )) [Pac18a],[Pac18b]
PoA(f ) is the solution to a tractable LP in 2 variables, O(n2) constraints
. LP involves all the components w(j) and f (j)
11

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocations
i.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) =( )
s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocations
i.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) =( )
s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocations
i.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) =( )
s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocationsi.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) =( )
s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocationsi.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) = infG∈G
(mina∈NE(G) W (a)
maxa∈AW (a)
)
s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocationsi.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) = infG∈G
(mina∈NE(G) W (a)
W (o)
)
s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocationsi.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) = infG∈G
(W (e)
W (o)
)
s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocationsi.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) = infG∈G
(W (e)
W (o)
)s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.
∑i
ui (e) ≥
∑i
ui (oi , e−i )
12

Proof Sketch - Part 1/4
Idea: transform the definition of PoA itself into a LP
Four steps towards the goal:
1. PoA(f ) is the same of the price of anarchy over a reduced class ofgames where each agent has only two feasible allocationsi.e. we can reduce to Ai = {ei , oi} with ei the worst NE
PoA(f ) = infG∈G
(W (e)
W (o)
)s.t. ui (e) ≥ ui (oi , e−i ) ∀i
2. Relax the previous program
PoA(f ) = infG∈G
W (e)
W (o)
s.t.∑i
ui (e) ≥∑i
ui (oi , e−i ) ∀i
12

Proof Sketch - Part 2/4
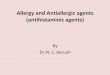
3. How to describe an instance? Need to describe W (a), ui (a) on A
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
o1
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θe1
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1
θe1
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1
θe1
θo2
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1
θe1
θo2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1e1 θo1
θe1
θo1o2
θe1e2
θo2e1 θo2
θo1e2
θo2e2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2θo1o2e1
θo1e1 θo1
θe1
θo1o2
θo1e1e2
θo2e1e2
θe1e2
θo2e1 θo2
θo1o2e2
θo1e2
θo2e2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1o2e1e2
θo1o2e1
θo1e1 θo1
θe1
θo1o2
θo1e1e2
θo2e1e2
θe1e2
θo2e1 θo2
θo1o2e2
θo1e2
θo2e2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1o2e1e2
θo1o2e1
θo1e1 θo1
θe1
θo1o2
θo1e1e2
θo2e1e2
θe1e2
θo2e1 θo2
θo1o2e2
θo1e2
θo2e2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations
,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1o2e1e2
θo1o2e1
θo1e1 θo1
θe1
θo1o2
θo1e1e2
θo2e1e2
θe1e2
θo2e1 θo2
θo1o2e2
θo1e2
θo2e2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1o2e1e2
θo1o2e1
θo1e1 θo1
θe1
θo1o2
θo1e1e2
θo2e1e2
θe1e2
θo2e1 θo2
θo1o2e2
θo1e2
θo2e2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!
13

Proof Sketch - Part 2/4
3. How to describe an instance? Need to describe W (a), ui (a) on A
e1
e2
o1
o2
θo1o2e1e2
θo1o2e1
θo1e1 θo1
θe1
θo1o2
θo1e1e2
θo2e1e2
θe1e2
θo2e1 θo2
θo1o2e2
θo1e2
θo2e2
θe2
Variables θ allow to computeW (a), ui (a) in all allocations,e.g.
W (e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)
+ (θe2 + θo2e2
+ θo1e2
+ θo1o2e2
)w(1)
+ (θe1e2 + θo1e1e2
+ θo2e1e2
+ θo1o2e1e2
)w(2)
u1(e1, e2)
= (θe1 + θo1e1
+ θo2e1
+ θo1o2e1
)w(1)f (1)
+ (θe1e2 + θo1e1e2
+ θo1o2e1e2
+ θo2e1e2
)w(2)f (2)
Issue: #weights is exponential!13

Proof Sketch - Part 3/4
4. use reduced variables for W(e), W(o),∑
i ui(e)− ui(oi, e−i)→ define θ(a, x , b) ∈ R≥0 for 1 ≤ a + x + b ≤n, a, x , b∈{1, . . . , n}
W (e) =∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b)
W (o) =∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
equil. =∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)
The program becomes PoA(f ) =
W (e)
W (o)
s.t.∑i
ui (e)− ui (oi , e−i ) ≥ 0
W (e) = 1
14

Proof Sketch - Part 3/4
4. use reduced variables for W(e), W(o),∑
i ui(e)− ui(oi, e−i)→ define θ(a, x , b) ∈ R≥0 for 1 ≤ a + x + b ≤n, a, x , b∈{1, . . . , n}
W (e) =∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b)
W (o) =∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
equil. =∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)
The program becomes PoA(f ) =
W (e)
W (o)
s.t.∑i
ui (e)− ui (oi , e−i ) ≥ 0
W (e) = 1
14

Proof Sketch - Part 3/4
4. use reduced variables for W(e), W(o),∑
i ui(e)− ui(oi, e−i)→ define θ(a, x , b) ∈ R≥0 for 1 ≤ a + x + b ≤n, a, x , b∈{1, . . . , n}
W (e) =∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b)
W (o) =∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
equil. =∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)
The program becomes PoA(f ) =
W (e)
W (o)
s.t.∑i
ui (e)− ui (oi , e−i ) ≥ 0
W (e) = 1
14

Proof Sketch - Part 3/4
4. use reduced variables for W(e), W(o),∑
i ui(e)− ui(oi, e−i)→ define θ(a, x , b) ∈ R≥0 for 1 ≤ a + x + b ≤n, a, x , b∈{1, . . . , n}
W (e) =∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b)
W (o) =∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
equil. =∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)
The program becomes PoA(f ) =
W (e)
W (o)
s.t.∑i
ui (e)− ui (oi , e−i ) ≥ 0
W (e) = 1
14

Proof Sketch - Part 3/4
4. use reduced variables for W(e), W(o),∑
i ui(e)− ui(oi, e−i)→ define θ(a, x , b) ∈ R≥0 for 1 ≤ a + x + b ≤n, a, x , b∈{1, . . . , n}
W (e) =∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b)
W (o) =∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
equil. =∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)
The program becomes
PoA(f ) =
W (e)
W (o)
s.t.∑i
ui (e)− ui (oi , e−i ) ≥ 0
W (e) = 1
14

Proof Sketch - Part 3/4
4. use reduced variables for W(e), W(o),∑
i ui(e)− ui(oi, e−i)→ define θ(a, x , b) ∈ R≥0 for 1 ≤ a + x + b ≤n, a, x , b∈{1, . . . , n}
W (e) =∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b)
W (o) =∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
equil. =∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)
The program becomes PoA(f ) = infθ(a,x ,b)≥0
W (e)
W (o)
s.t.∑i
ui (e)− ui (oi , e−i ) ≥ 0
W (e) = 1
14

Proof Sketch - Part 3/4
4. use reduced variables for W(e), W(o),∑
i ui(e)− ui(oi, e−i)→ define θ(a, x , b) ∈ R≥0 for 1 ≤ a + x + b ≤n, a, x , b∈{1, . . . , n}
W (e) =∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b)
W (o) =∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
equil. =∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)
The program becomes PoA(f ) = infθ(a,x ,b)≥0
1
W (o)
W (e)
W (o)
s.t.∑i
ui (e)− ui (oi , e−i ) ≥ 0
W (e) = 1
14

Proof Sketch - Part 4/4: Primal LP
PoA(f ) =1
W ?
W ? = supθ(a,x ,b)
∑a,x ,b
1{b+x≥1}w(b + x)θ(a, x , b)
s.t.∑a,x ,b
[af (a+x)w(a+x)−bf (a+x+1)w(a+x+1)]θ(a, x , b)≥0
∑a,x ,b
1{a+x≥1}w(a + x)θ(a, x , b) = 1
θ(a, x , b) ≥ 0 ∀(a, x , b) ∈ I .
15

Dual LP
PoA(f ) =1
W ?
W ? = infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af (a+x)w(a+x)− bf (a+x+1)w(a+x+1)] ≤ 0
∀(a, x , b) ∈
. 2 decision variables, O(n2) constraints
. observe the special structure i.e. minλ,µ µ subject to µ ≥ . . .
. gives PoA for e.g., fsv(j) = 1/j , fmc(j) = 1− w(j − 1)/w(j)
16

Dual LP
PoA(f ) =1
W ?
W ? = infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af (a+x)w(a+x)− bf (a+x+1)w(a+x+1)] ≤ 0
∀(a, x , b) ∈ I
. 2 decision variables, O(n2) constraints
. observe the special structure i.e. minλ,µ µ subject to µ ≥ . . .
. gives PoA for e.g., fsv(j) = 1/j , fmc(j) = 1− w(j − 1)/w(j)
16

Dual LP
PoA(f ) =1
W ?
W ? = infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af (a+x)w(a+x)− bf (a+x+1)w(a+x+1)] ≤ 0
∀(a, x , b) ∈ ∂I
. 2 decision variables, O(n2) constraints
. observe the special structure i.e. minλ,µ µ subject to µ ≥ . . .
. gives PoA for e.g., fsv(j) = 1/j , fmc(j) = 1− w(j − 1)/w(j)
16

Dual LP
PoA(f ) =1
W ?
W ? = infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af (a+x)w(a+x)− bf (a+x+1)w(a+x+1)] ≤ 0
∀(a, x , b) ∈ ∂I
. 2 decision variables, O(n2) constraints
. observe the special structure i.e. minλ,µ µ subject to µ ≥ . . .
. gives PoA for e.g., fsv(j) = 1/j , fmc(j) = 1− w(j − 1)/w(j)
16

Dual LP
PoA(f ) =1
W ?
W ? = infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af (a+x)w(a+x)− bf (a+x+1)w(a+x+1)] ≤ 0
∀(a, x , b) ∈ ∂I
. 2 decision variables, O(n2) constraints
. observe the special structure i.e. minλ,µ µ subject to µ ≥ . . .
. gives PoA for e.g., fsv(j) = 1/j , fmc(j) = 1− w(j − 1)/w(j)
16

Dual LP
PoA(f ) =1
W ?
W ? = infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af (a+x)w(a+x)− bf (a+x+1)w(a+x+1)] ≤ 0
∀(a, x , b) ∈ ∂I
. 2 decision variables, O(n2) constraints
. observe the special structure i.e. minλ,µ µ subject to µ ≥ . . .
. gives PoA for e.g., fsv(j) = 1/j , fmc(j) = 1− w(j − 1)/w(j)
16

PoA: connection with existing literature
Covering Games: Approximation throughNon-Cooperation ?
Martin Gairing
Department of Computer Science, University of Liverpool, [email protected]
Abstract. We propose approximation algorithms under game-theoreticconsiderations. We indroduce and study the general covering problemwhich is a natural generalization of the well-studied max-n-cover prob-lem. In the general covering problem, we are given a universal set ofweighted elements E and n collections of subsets of the elements. Thetask is to choose one subset from each collection such that the totalweight of their union is as large as possible. In our game-theoretic set-ting, the choice in each collection is made by an independent player.For covering an element, the players receive a payo↵ defined by a non-increasing utility sharing function. This function defines the fraction thateach covering player receives from the weight of the elements.We show how to construct a utility sharing function such that every NashEquilibrium approximates the optimal solution by a factor of 1 � 1
e. We
also prove that any sequence of unilateral improving steps is polynomiallybounded. This gives rise to a polynomial-time local search approximationalgorithm whose approximation ratio is best possible.
1 Introduction
Motivation and Framework. Large scale distributed systems, like the Inter-net, usually lack a centralized control authority. Instead, they are operated andcontrolled in a distributed fashion by competing entities – modeled as players –which make their decisions in order to optimize their own private utility. Suchsystems are assumed to end up in a Nash equilibrium [21] – a state in whichno player wishes to unilaterally leave her own strategy in order to improve thevalue of her private utility. However, Nash equilibria are often suboptimal solu-tions with respect to the social objective function. The price of anarchy [19] isa measure for the performance degradation. It is defined as the worst-case ratiobetween the values of a social objective function in a Nash equilibrium and inan optimum solution.
As the designer of a distributed system we are faced with the main challengeof how to design the distributed system in order to optimize this social objec-tive function even in the presence of myopic players. However, even if all players
? This work was supported by a fellowship within the Postdoc-Programme of theGerman Academic Exchange Service (DAAD).
17

PoA: connection with existing literature
Covering Games: Approximation throughNon-Cooperation ?
Martin Gairing
Department of Computer Science, University of Liverpool, [email protected]
Abstract. We propose approximation algorithms under game-theoreticconsiderations. We indroduce and study the general covering problemwhich is a natural generalization of the well-studied max-n-cover prob-lem. In the general covering problem, we are given a universal set ofweighted elements E and n collections of subsets of the elements. Thetask is to choose one subset from each collection such that the totalweight of their union is as large as possible. In our game-theoretic set-ting, the choice in each collection is made by an independent player.For covering an element, the players receive a payo↵ defined by a non-increasing utility sharing function. This function defines the fraction thateach covering player receives from the weight of the elements.We show how to construct a utility sharing function such that every NashEquilibrium approximates the optimal solution by a factor of 1 � 1
e. We
also prove that any sequence of unilateral improving steps is polynomiallybounded. This gives rise to a polynomial-time local search approximationalgorithm whose approximation ratio is best possible.
1 Introduction
Motivation and Framework. Large scale distributed systems, like the Inter-net, usually lack a centralized control authority. Instead, they are operated andcontrolled in a distributed fashion by competing entities – modeled as players –which make their decisions in order to optimize their own private utility. Suchsystems are assumed to end up in a Nash equilibrium [21] – a state in whichno player wishes to unilaterally leave her own strategy in order to improve thevalue of her private utility. However, Nash equilibria are often suboptimal solu-tions with respect to the social objective function. The price of anarchy [19] isa measure for the performance degradation. It is defined as the worst-case ratiobetween the values of a social objective function in a Nash equilibrium and inan optimum solution.
As the designer of a distributed system we are faced with the main challengeof how to design the distributed system in order to optimize this social objec-tive function even in the presence of myopic players. However, even if all players
? This work was supported by a fellowship within the Postdoc-Programme of theGerman Academic Exchange Service (DAAD).
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 59, NO. 3, MARCH 2014 571
Generalized Efficiency Bounds inDistributed Resource Allocation
Jason R. Marden and Tim Roughgarden
Abstract—Game theory is emerging as a popular tool for dis-tributed control of multiagent systems. To take advantage of thesegame theoretic tools, the interactions of the autonomous agentsmust be designed within a game-theoretic environment. A centralcomponent of this game-theoretic design is the assignment of a localutility function to each agent. One promising approach to utilitydesign is assigning each agent a utility function according to theagent’s Shapley value. This method frequently results in games thatpossess many desirable features, such as the existence of pure Nashequilibria with near-optimal efficiency. In this paper, we explorethe relationship between the Shapley value utility design and theresulting efficiency of both pure Nash equilibria and coarse corre-lated equilibria. To study this relationship, we introduce a simpleclass of resource allocation problems. Within this class, we derivean explicit relationship between the structure of the resource allo-cation problem and the efficiency of the resulting equilibria. Lastly,we derive a bicriteria bound for this class of resource allocationproblems—a bound on the value of the optimal allocation relativeto the value of an equilibrium allocation with additional agents.
Index Terms—Cost sharing, distributed control, game theory,price of anarchy.
I. INTRODUCTION
R ESOURCE allocation is a fundamental problem thatarises in many application domains ranging from the
social sciences to engineering [1]–[7]. One example is theproblem of routing information through a shared network,where the global objective is to minimize average delay [7].An alternative example is the problem of allocating sensors toa given mission space where the global objective is to maxi-mize coverage area [6]. Regardless of the specific applicationdomain, the central objective is always the same: allocateresources to optimize a given global objective.Research has focused on both centralized and distributed
approaches for resource allocation [2], [5], [8]–[13]. In thispaper, we study distributed algorithms for resource allocation
Manuscript received May 21, 2012; revised March 29, 2013 and August 16,2013; accepted October 15, 2013. Date of publication January 20, 2014; dateof current version February 19, 2014. This paper was presented in part at theProceedings of the 48th IEEE Conference on Decision and Control, December2010. This work was supported by AFOSR grants FA9550-09-1-0538 andFA9550-12-1-0359 and ONR grant N00014-12-1-0643. Recommended byAssociate Editor Ozdaglar.J. R. Marden is with the Department of Electrical, Computer, and Energy
Engineering, University of Colorado, Boulder, CO 80309 USA (e-mail: [email protected]).T. Roughgarden is with the Department of Computer Science, Stanford, Stan-
ford, CA 94305 USA (e-mail: [email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TAC.2014.2301613
in large-scale engineering systems, where a centralized con-trol approach is undesirable or even infeasible. For example,a centralized control approach may be impossible for theaforementioned sensor allocation problem because of the com-plexity associated with a potentially large number of sensors,the vastness/uncertainty of the mission space, or potentialstealth requirements that restrict communication capabilities.A more desirable control approach is to establish a distributedcontrol algorithm that allows the sensors to allocate themselveseffectively over the mission space without the need for globalintervention [14], [15]. Such an algorithm would eliminate theneed for centralized communication and introduce an inherentrobustness to communication failures, sensor failures, andenvironmental uncertainties. While desirable, establishing sucha distributed control algorithm comes with its share of chal-lenges. Is it possible to characterize the global behavior thatresults from the interactions of a large group of autonomousagents, each acting independently in response to its own localinformation? How can we coordinate the agents behavior toensure that the emergent global behavior is desirable? What dowe give up in terms of efficiency when we transition from acentralized to a distributed control approach?A popular tool for distributed resource allocation is game
theory [11]–[13], [16]–[18]. Game theory is a well-establisheddiscipline in the social sciences used for describing the emer-gent global behavior in social systems such as traffic networks,social networks, and auctions. More generally, “Game theory isa bag of analytical tools designed to help us understand the phe-nomena that we observe when decision-makers interact” [19].The appeal of applying game-theoretic tools to distributed en-gineering systems stems from the fact that the underlying deci-sion-making architecture in social systems and the desired deci-sion-making architecture in distributed engineering systems canbe analyzed using the same mathematical tools. Furthermore,the field of game theory provides a vast array of tools that areextremely valuable for the design and control of distributed en-gineering systems [20]–[22].To take advantage of game theoretic tools for distributed en-
gineering systems, the interactions of the autonomous agentsmust be designed within a game-theoretic environment. Thismeans that the system designer must specify the following ele-ments: i) the set of decision-making agents, ii) a set of actions foreach agent, and iii) a local utility function for each agent. Whilespecifying the agents and their respective actions can be rela-tively straightforward, assigning local utility functions is some-what more opaque. There are many pertinent issues that needto be considered when designing the agents’ utility functions
0018-9286 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
17

PoA: connection with existing literature
Covering Games: Approximation throughNon-Cooperation ?
Martin Gairing
Department of Computer Science, University of Liverpool, [email protected]
Abstract. We propose approximation algorithms under game-theoreticconsiderations. We indroduce and study the general covering problemwhich is a natural generalization of the well-studied max-n-cover prob-lem. In the general covering problem, we are given a universal set ofweighted elements E and n collections of subsets of the elements. Thetask is to choose one subset from each collection such that the totalweight of their union is as large as possible. In our game-theoretic set-ting, the choice in each collection is made by an independent player.For covering an element, the players receive a payo↵ defined by a non-increasing utility sharing function. This function defines the fraction thateach covering player receives from the weight of the elements.We show how to construct a utility sharing function such that every NashEquilibrium approximates the optimal solution by a factor of 1 � 1
e. We
also prove that any sequence of unilateral improving steps is polynomiallybounded. This gives rise to a polynomial-time local search approximationalgorithm whose approximation ratio is best possible.
1 Introduction
Motivation and Framework. Large scale distributed systems, like the Inter-net, usually lack a centralized control authority. Instead, they are operated andcontrolled in a distributed fashion by competing entities – modeled as players –which make their decisions in order to optimize their own private utility. Suchsystems are assumed to end up in a Nash equilibrium [21] – a state in whichno player wishes to unilaterally leave her own strategy in order to improve thevalue of her private utility. However, Nash equilibria are often suboptimal solu-tions with respect to the social objective function. The price of anarchy [19] isa measure for the performance degradation. It is defined as the worst-case ratiobetween the values of a social objective function in a Nash equilibrium and inan optimum solution.
As the designer of a distributed system we are faced with the main challengeof how to design the distributed system in order to optimize this social objec-tive function even in the presence of myopic players. However, even if all players
? This work was supported by a fellowship within the Postdoc-Programme of theGerman Academic Exchange Service (DAAD).
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 59, NO. 3, MARCH 2014 571
Generalized Efficiency Bounds inDistributed Resource Allocation
Jason R. Marden and Tim Roughgarden
Abstract—Game theory is emerging as a popular tool for dis-tributed control of multiagent systems. To take advantage of thesegame theoretic tools, the interactions of the autonomous agentsmust be designed within a game-theoretic environment. A centralcomponent of this game-theoretic design is the assignment of a localutility function to each agent. One promising approach to utilitydesign is assigning each agent a utility function according to theagent’s Shapley value. This method frequently results in games thatpossess many desirable features, such as the existence of pure Nashequilibria with near-optimal efficiency. In this paper, we explorethe relationship between the Shapley value utility design and theresulting efficiency of both pure Nash equilibria and coarse corre-lated equilibria. To study this relationship, we introduce a simpleclass of resource allocation problems. Within this class, we derivean explicit relationship between the structure of the resource allo-cation problem and the efficiency of the resulting equilibria. Lastly,we derive a bicriteria bound for this class of resource allocationproblems—a bound on the value of the optimal allocation relativeto the value of an equilibrium allocation with additional agents.
Index Terms—Cost sharing, distributed control, game theory,price of anarchy.
I. INTRODUCTION
R ESOURCE allocation is a fundamental problem thatarises in many application domains ranging from the
social sciences to engineering [1]–[7]. One example is theproblem of routing information through a shared network,where the global objective is to minimize average delay [7].An alternative example is the problem of allocating sensors toa given mission space where the global objective is to maxi-mize coverage area [6]. Regardless of the specific applicationdomain, the central objective is always the same: allocateresources to optimize a given global objective.Research has focused on both centralized and distributed
approaches for resource allocation [2], [5], [8]–[13]. In thispaper, we study distributed algorithms for resource allocation
Manuscript received May 21, 2012; revised March 29, 2013 and August 16,2013; accepted October 15, 2013. Date of publication January 20, 2014; dateof current version February 19, 2014. This paper was presented in part at theProceedings of the 48th IEEE Conference on Decision and Control, December2010. This work was supported by AFOSR grants FA9550-09-1-0538 andFA9550-12-1-0359 and ONR grant N00014-12-1-0643. Recommended byAssociate Editor Ozdaglar.J. R. Marden is with the Department of Electrical, Computer, and Energy
Engineering, University of Colorado, Boulder, CO 80309 USA (e-mail: [email protected]).T. Roughgarden is with the Department of Computer Science, Stanford, Stan-
ford, CA 94305 USA (e-mail: [email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TAC.2014.2301613
in large-scale engineering systems, where a centralized con-trol approach is undesirable or even infeasible. For example,a centralized control approach may be impossible for theaforementioned sensor allocation problem because of the com-plexity associated with a potentially large number of sensors,the vastness/uncertainty of the mission space, or potentialstealth requirements that restrict communication capabilities.A more desirable control approach is to establish a distributedcontrol algorithm that allows the sensors to allocate themselveseffectively over the mission space without the need for globalintervention [14], [15]. Such an algorithm would eliminate theneed for centralized communication and introduce an inherentrobustness to communication failures, sensor failures, andenvironmental uncertainties. While desirable, establishing sucha distributed control algorithm comes with its share of chal-lenges. Is it possible to characterize the global behavior thatresults from the interactions of a large group of autonomousagents, each acting independently in response to its own localinformation? How can we coordinate the agents behavior toensure that the emergent global behavior is desirable? What dowe give up in terms of efficiency when we transition from acentralized to a distributed control approach?A popular tool for distributed resource allocation is game
theory [11]–[13], [16]–[18]. Game theory is a well-establisheddiscipline in the social sciences used for describing the emer-gent global behavior in social systems such as traffic networks,social networks, and auctions. More generally, “Game theory isa bag of analytical tools designed to help us understand the phe-nomena that we observe when decision-makers interact” [19].The appeal of applying game-theoretic tools to distributed en-gineering systems stems from the fact that the underlying deci-sion-making architecture in social systems and the desired deci-sion-making architecture in distributed engineering systems canbe analyzed using the same mathematical tools. Furthermore,the field of game theory provides a vast array of tools that areextremely valuable for the design and control of distributed en-gineering systems [20]–[22].To take advantage of game theoretic tools for distributed en-
gineering systems, the interactions of the autonomous agentsmust be designed within a game-theoretic environment. Thismeans that the system designer must specify the following ele-ments: i) the set of decision-making agents, ii) a set of actions foreach agent, and iii) a local utility function for each agent. Whilespecifying the agents and their respective actions can be rela-tively straightforward, assigning local utility functions is some-what more opaque. There are many pertinent issues that needto be considered when designing the agents’ utility functions
0018-9286 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
MATHEMATICS OF OPERATIONS RESEARCHVol. 42, No. 4, November 2017, pp. 1197–1218
http://pubsonline.informs.org/journal/moor/ ISSN 0364-765X (print), ISSN 1526-5471 (online)
Optimal Approximation for Submodular and SupermodularOptimization with Bounded CurvatureMaxim Sviridenko,a Jan Vondrák,b Justin Wardc
a Yahoo! Labs, New York, New York 10018; b Stanford University, Stanford, California 94305; c Ecole Polytechnique Federale de Lausanne,1015 Lausanne, SwitzerlandContact: [email protected] (MS); [email protected] (JV); [email protected] (JW)
Received: December 30, 2014Revised: June 20, 2016Accepted: September 8, 2016Published Online in Articles in Advance:May 16, 2017
MSC2010 Subject Classification: Primary:90C27; secondary: 68W25OR/MS Subject Classification: Primary:analysis of algorithms; secondary: mathematics:functions
https://doi.org/10.1287/moor.2016.0842
Copyright: © 2017 INFORMS
Abstract. We design new approximation algorithms for the problems of optimizing sub-modular and supermodular functions subject to a single matroid constraint. Specifically,we consider the case in which we wish to maximize a monotone increasing submodularfunction or minimize a monotone decreasing supermodular function with a bounded totalcurvature c. Intuitively, the parameter c represents how nonlinear a function f is: whenc ⇤ 0, f is linear, while for c ⇤ 1, f may be an arbitrary monotone increasing submodu-lar function. For the case of submodular maximization with total curvature c, we obtain a(1 � c/e)-approximation—the first improvement over the greedy algorithm of of Confortiand Cornuéjols from 1984, which holds for a cardinality constraint, as well as a recent anal-ogous result for an arbitrary matroid constraint.
Our approach is based on modifications of the continuous greedy algorithm andnonoblivious local search, and allows us to approximately maximize the sum of a non-negative, monotone increasing submodular function and a (possibly negative) linearfunction. We show how to reduce both submodular maximization and supermodularminimization to this general problem when the objective function has bounded totalcurvature. We prove that the approximation results we obtain are the best possible inthe value oracle model, even in the case of a cardinality constraint.
We define an extension of the notion of curvature to general monotone set functionsand show a (1 � c)-approximation for maximization and a 1/(1 � c)-approximation forminimization cases. Finally, we give two concrete applications of our results in the set-tings of maximum entropy sampling, and the column-subset selection problem.
Funding: Justin Ward was supported by ERC Starting Grant [335288-OptApprox] and EPSRC [GrantEP/J021814/1].
Keywords: submodular maximization • supermodular minimization • curvature • matroids • continuous greedy • local search • column-subsetselection • maximum entropy sampling
1. IntroductionThe problem of maximizing a submodular function subject to various constraints is a metaproblem that appearsin various settings, from combinatorial auctions (Lehmann et al. [32], Dobzinski et al. [15], Vondrák [40]) andviral marketing in social networks (Kempe et al. [25]) to optimal sensor placement in machine learning (Krauseet al. [29, 28, 30], Krause and Guestrin [27]). A classic result by Nemhauser et al. [35] is that the greedy algorithmprovides a (1 � 1/e)-approximation for maximizing a monotone increasing submodular function subject to acardinality constraint. The factor of 1�1/e cannot be improved, under the assumption that the algorithm queriesthe objective function a polynomial number of times (Nemhauser and Wolsey [34]). While this result rules outimproved approximation algorithms for arbitrary monotone increasing submodular functions, it is nonethelesspossible to obtain improvements for restricted classes of submodular functions. One natural such class is basedon the following notion of curvature, introduced by Conforti and Cornuéjols [11]:
Consider a set function f : 2X ! ✓�0, and for any A ✓ X, j < A let fA( j) ⇤ f (A [ { j}) � f (A) be the marginalcontribution of element j with respect to set A. Then, f is monotone increasing and submodular if and onlyif fA( j) � 0 for all A and j < A and fA( j) � fB( j) for all A ✓ B and j < B, respectively. In this case, the marginalcontribution fA( j) of element j may diminish as the set A grows, although it always remains nonnegative.Intuitively, the curvature of a monotone increasing submodular function measures how much any element’smarginal may decrease in the worst case. Formally, the total curvature c 2 [0, 1] is defined by Conforti andCornuéjols [11] as:
c ⇤ maxj2X⇤
fú( j)� fX� j( j)fú( j)
⇤ 1�minj2X⇤
fX� j( j)fú( j) , (1)
1197
17

Utility design reduces to
Given f , characterize or bound PoA(f )
Find f with highest PoA(f )
18

Utility design reduces to
Given f , characterize or bound PoA(f )
Find f with highest PoA(f )
18

Optimal price of anarchy
Corollary (Optimizing PoA) [Pac18a], [Pac18b]
Determining f ∈ Rn≥0 maximizing PoA(f ) is a tractable linear program
Proof.
PoA(f ) =1
W ?
W ? =
minf ∈Rn
≥0
infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b + x)− µ1{a+x≥1}w(a + x)+
+ λ[af (a + x)w(a+x)− bf (a + x + 1)w(a + x + 1)] ≤ 0
∀(a, x , b) ∈ ∂I
19

Optimal price of anarchy
Corollary (Optimizing PoA) [Pac18a], [Pac18b]
Determining f ∈ Rn≥0 maximizing PoA(f ) is a tractable linear program
Proof.
PoA(f ) =1
W ?
W ? =
minf ∈Rn
≥0
infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b + x)− µ1{a+x≥1}w(a + x)+
+ λ[af (a + x)w(a+x)− bf (a + x + 1)w(a + x + 1)] ≤ 0
∀(a, x , b) ∈ ∂I
19

Optimal price of anarchy
Corollary (Optimizing PoA) [Pac18a], [Pac18b]
Determining f ∈ Rn≥0 maximizing PoA(f ) is a tractable linear program
Proof.
PoA(f ) =1
W ?
W ? =
minf ∈Rn
≥0
infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b + x)− µ1{a+x≥1}w(a + x)+
+ λ[af (a + x)w(a+x)− bf (a + x + 1)w(a + x + 1)] ≤ 0
∀(a, x , b) ∈ ∂I
19

Optimal price of anarchy
Corollary (Optimizing PoA) [Pac18a], [Pac18b]
Determining f ∈ Rn≥0 maximizing PoA(f ) is a tractable linear program
Proof.
PoA(f ) =1
W ?
W ? =
minf ∈Rn
≥0
infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b + x)− µ1{a+x≥1}w(a + x)+
+ λ[af (a + x)w(a+x)− bf (a + x + 1)w(a + x + 1)] ≤ 0
∀(a, x , b) ∈ ∂I
19

Optimal price of anarchy
Corollary (Optimizing PoA) [Pac18a], [Pac18b]
Determining f ∈ Rn≥0 maximizing PoA(f ) is a tractable linear program
Proof.
PoA(f ) =1
W ?
W ? = minf ∈Rn
≥0
infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b + x)− µ1{a+x≥1}w(a + x)+
+ λ[af (a + x)w(a+x)− bf (a + x + 1)w(a + x + 1)] ≤ 0
∀(a, x , b) ∈ ∂I
19

Optimal price of anarchy
Corollary (Optimizing PoA) [Pac18a], [Pac18b]
Determining f ∈ Rn≥0 maximizing PoA(f ) is a tractable linear program
Proof.
PoA(f ) =1
W ?
W ? = minf ∈Rn
≥0
infλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b + x)− µ1{a+x≥1}w(a + x)+
+ λ[af (a + x)w(a+x)− bf (a + x + 1)w(a + x + 1)] ≤ 0
∀(a, x , b) ∈ ∂I
19

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 0
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 0
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 0
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
1− c/e
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 0.2
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
1− c/e
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 0.4
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
1− c/e
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 0.6
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
1− c/e
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 0.8
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
1− c/e
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 1
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
1− c/e
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 1
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
GT
1− c/e
20

Back to the main result
Example:
- # agents ≤ 40
- w(j) = jd , d = 1
1 2 3 4 5
12345
j
w
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fopt)
Solution of LP
GT
1− c/e
1− c/e
20

Comparison with other distributions, #agents ≤ 20
. fSV(j) = 1j
. fMC(j) = 1− w(j−1)w(j)
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fOPT)
PoA(fSV)
PoA(fMC)
1− c/e
21

Comparison with other distributions, #agents ≤ 20
. fSV(j) = 1j
. fMC(j) = 1− w(j−1)w(j)
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fOPT)
PoA(fSV)
PoA(fMC)
1− c/e
21

Comparison with other distributions, #agents ≤ 20
. fSV(j) = 1j
. fMC(j) = 1− w(j−1)w(j)
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fOPT)
PoA(fSV)
PoA(fMC)
1− c/e
21

Comparison with other distributions, #agents ≤ 20
. fSV(j) = 1j
. fMC(j) = 1− w(j−1)w(j)
0 0.2 0.4 0.6 0.8 10.5
0.6
0.7
0.8
0.9
1
d
PoA(fOPT)
PoA(fSV)
PoA(fMC)
1− c/e
21

Conclusions and Outlook
The problem: Generalized Multiagent Maximum Coverage
The approach: Approximation through game theory
. Computing the exact price of anarchy
. Optimizing the price of anarchy
The contribution: Distributed algorithms, improved performance
Outlook: Extension to
. Coarse correlated equilibria
. More general W
22

Conclusions and Outlook
The problem: Generalized Multiagent Maximum Coverage
The approach: Approximation through game theory
. Computing the exact price of anarchy
. Optimizing the price of anarchy
The contribution: Distributed algorithms, improved performance
Outlook: Extension to
. Coarse correlated equilibria
. More general W
22

Conclusions and Outlook
The problem: Generalized Multiagent Maximum Coverage
The approach: Approximation through game theory
. Computing the exact price of anarchy
. Optimizing the price of anarchy
The contribution: Distributed algorithms, improved performance
Outlook: Extension to
. Coarse correlated equilibria
. More general W
22

Conclusions and Outlook
The problem: Generalized Multiagent Maximum Coverage
The approach: Approximation through game theory
. Computing the exact price of anarchy
. Optimizing the price of anarchy
The contribution: Distributed algorithms, improved performance
Outlook: Extension to
. Coarse correlated equilibria
. More general W
22

Conclusions and Outlook
The problem: Generalized Multiagent Maximum Coverage
The approach: Approximation through game theory
. Computing the exact price of anarchy
. Optimizing the price of anarchy
The contribution: Distributed algorithms, improved performance
Outlook: Extension to
. Coarse correlated equilibria
. More general W
22

Conclusions and Outlook
The problem: Generalized Multiagent Maximum Coverage
The approach: Approximation through game theory
. Computing the exact price of anarchy
. Optimizing the price of anarchy
The contribution: Distributed algorithms, improved performance
Outlook: Extension to
. Coarse correlated equilibria
. More general W
22

Thank youpeople.ee.ethz.ch/~dariop
[Pac18a] D. Paccagnan, R. Chandan and J.R. Marden. “Distributed resource allocationthrough utility design - Part I: optimizing the performance certificates via theprice of anarchy”. ArXiv, 2018.
[Pac18b] D. Paccagnan and J.R. Marden. “Distributed resource allocation through utilitydesign - Part II: applications to submodular, supermodular and set coveringproblems”. ArXiv, 2018.
23

Thank youpeople.ee.ethz.ch/~dariop
[Pac18a] D. Paccagnan, R. Chandan and J.R. Marden. “Distributed resource allocationthrough utility design - Part I: optimizing the performance certificates via theprice of anarchy”. ArXiv, 2018.
[Pac18b] D. Paccagnan and J.R. Marden. “Distributed resource allocation through utilitydesign - Part II: applications to submodular, supermodular and set coveringproblems”. ArXiv, 2018.
23