Embed Size (px)
Citation preview

Geometrical aspects of parameter estimation of a stochastic gravitational wave background:Beyond the Fisher analysis
Naoki Seto
Department of Physics, Kyoto University, Kyoto 606-8502, Japan
Koutarou Kyutoku
Theory Center, Institute of Particles and Nuclear Studies, KEK, Tsukuba, Ibaraki, 305-0801, Japan(Received 17 May 2012; published 6 August 2012)
The maximum likelihood method is often used for parameter estimation in gravitational wave
astronomy. Recently, an interesting approach was proposed by Vallisneri to evaluate the distributions
of parameter estimation errors expected for the method. This approach is to statistically analyze the local
peaks of the likelihood surface, and works efficiently even for signals with low signal-to-noise ratios.
Focusing special attention to geometric structure of the likelihood surface, we follow the proposed
approach and derive formulas for a simplified model of data analysis where the target signal has only one
intrinsic parameter, along with its overall amplitude. Then we apply our formulas to correlation analysis of
stochastic gravitational wave background with a power-law spectrum. We report qualitative trends of the
formulas using numerical results specifically obtained for correlation analysis with two Advanced-LIGO
detectors.
DOI: 10.1103/PhysRevD.86.042002 PACS numbers: 04.80.Nn, 95.55.Ym, 95.85.Sz
I. INTRODUCTION
Nowadays, large-scale ground-based laser interferome-ters such as LIGO [1], Virgo [2], and KAGRA (formerlyLCGT) [3] are being upgraded or constructed to realizepowerful second generation detectors. It is expected thatwe will succeed to directly detect gravitational waves(GWs) around 10–1000 Hz in this decade. Subsequently,the Laser Interferometer Space Antenna (LISA) [4] (seealso [5] for eLISA/NGO) will explore a new window ofGWs around 0.1–100 mHz. At the lower frequency regime�1 nHz, the pulsar timing arrays [6,7] have been signifi-cantly improving their sensitivities to GWs.
Under these circumstances, possibilities of GW astron-omy have been actively discussed for these projects, andextracting parameters characterizing GWs is widelyrecognized as one of the most important tasks. To evaluatethe accuracy of parameter estimation, the Fisher matrixapproximation is a standard tool and often used in thesestudies [8–11]. This method is quite simple to implement,but its performance is known to become worse at lowersignal-to-noise ratios (SNRs) [12]. Unfortunately, a fullnumerical study mimicking actual data analysis requiresa huge computational cost. To fill the gaps between thesetwo methods, Vallisneri [13] recently proposed an interest-ing and efficient method to predict distributions of theparameter estimation errors expected for maximum like-lihood analyses. He noticed that the mean densities of thelocal stationary points (peaks, valleys, and saddle points)of a likelihood surface can be handled relatively conciselyunder fluctuations of the surface induced by the detectornoises. This is because (i) the dependence of the relevantexpressions on the noises is rather simple and (ii) only a
small number of independent noise components is in-volved. In his work, it was suggested that the new methodcan well reproduce the costly results obtained by fullynumerical methods. He also commented that the proposedmethod can be utilized to analyze multiple local peaks,including not global ones that could cause troubles at theactual parameter estimation. In this paper, we examine thisdirection, paying attention to geometrical properties oflikelihood surfaces, not only their local peaks but alsovalleys and saddle points.As a first step, our target is limited to a simple model
where we estimate only one intrinsic parameter and theoverall amplitude of the signal (thus at most two fittingparameters). While we cannot analyze important issuesinherent to large dimensionalities of fitting parameters,our study would elucidate basic aspects of parameter esti-mation with the maximum likelihood method.In this paper, we first present a formal analysis to write
down the expected densities of local stationary points of alikelihood surface. Here we assume Gaussian noises, butdo not specifically limit our analysis to GW observation.Then we apply our formal results to correlation analysis ofstochastic GW background. We assume a power-law spec-trum for the background and discuss estimation of thespectral index and the overall amplitude. Many theoreticalmodels of the background predict power-law spectra, re-flecting cosmological or astrophysical scale-free processesrelevant for generation of GWs, and therefore the assump-tions on the spectral shape would be reasonable at least inthe frequency band of a detector (see, e.g., [14–18]).Therefore, the spectral index and the amplitude would bethe primary parameters of a background and serve as thekey information to discriminate its origin. Since the SNR
PHYSICAL REVIEW D 86, 042002 (2012)
1550-7998=2012=86(4)=042002(17) 042002-1 � 2012 American Physical Society

of the correlation analysis increases with the observationtime Tobs as SNR / ffiffiffiffiffiffiffiffiffi
Tobs
p[19,20], we initially need to deal
with a low SNR data. This fact may reduce the validity ofthe Fisher matrix analysis for the early era of GW astron-omy. Given these aspects, our simple analysis by the newmethod with one intrinsic parameter is not just a toy model,but firmly has a suitable and realistic application.
As a concrete model, we examine the correlation analy-sis with the two Advanced LIGO detectors and evaluate theexpected number densities of the local stationary points ofthe maximum likelihood surface in our parameter space.These results would be useful to discuss the prospects ofstochastic GW background measurements with LIGO,and also helps us to grasp qualitative trends of the formalexpressions.
We find that, for moderate signal strength SNR * 5,there would be vanishingly low probabilities to have multi-ples peaks on the likelihood surfaces around the trueparameters of the GW background. In contrast, false peaksarise mainly by noises at the distant parameter regionswhere the true signal loses correlation. They typicallyhave low likelihood values and will be safely excludedby setting an appropriate threshold on the likelihood value.We also discuss biases of the fitting parameters estimatedwith the maximum likelihood method. For SNR ! 1, thebiases asymptotically decrease as 1=SNR2 relative to thetrue parameter and would be buried beneath the parameterestimation errors ( / 1=SNR).
This paper is organized as follows; in Sec. II we brieflydiscuss parameter estimation with the maximum likelihoodmethod. In Sec. III, we provide formal expressions fordensities of the local stationary points. Section IVis devotedto link the results in Sec. III to the correlation analysis forstochastic GW background. In Sec. V, we evaluate thedensities of the stationary points for the two AdvancedLIGO detectors and report the observed trends. We alsocompare the traditional Fisher matrix approximation withthe new predictions. Section VI is a summary of this paper.
II. PARAMETER ESTIMATION
In this section, we briefly discuss a simplified model ofdata analysis, particularly estimation of characteristicparameters contaminated by instrumental noise. Our dataare given by a real vector � ¼ ð�1; . . . ; �MÞ with itsdimension M, and each element �� (� runs from 1 to M)consists of the mean value u� and the noise �� as
�� ¼ u� þ ��: (1)
Throughout this paper, the noise �� is presumed to have aGaussian distribution with zero mean and variance�2
�. It isalso assumed that each pair of the noise components has nocorrelation, i.e.,
h����i ¼ ����2�; (2)
where the bracket hi means the ensemble average.
We define the inner product between two real vectorsa ¼ ða1; . . . ; aMÞ and b ¼ ðb1; . . . ; bMÞ with their dimen-sion M by
fa; bg � XM�¼1
a�b��2
�
: (3)
The probability distribution function for the noise � isexpressed using this inner product as
Pð�ÞD� ¼ N exp
��f�; �g
2
�D�; (4)
where D� ¼ QM�¼1 d�� and N ¼ Q
M�¼1ð2��2
�Þ�1=2.Hereafter, we omit the subscript � of the vector componentfor simplicity, whenever we expect that the confusion ofthe vector component and the vector itself may not arise.In this study, candidates of our target signal u are
assumed to have the form
u ¼ �k̂ðpÞ; (5)
where � � 0 is the overall amplitude and k̂ðpÞ is thetemplate vector characterized by a single intrinsic parame-ter, p. The template is chosen to be a unit vector, so that itsatisfies the normalization condition
fk̂ðpÞ; k̂ðpÞg ¼ 1: (6)
According to the definition described above, the amplitudeparameter � is identical to the optimal SNR of the data �,and has a clear meaning. In particular, we assign �t and pt
(t: suffix for the true value) for the parameters of the truesignal ut as
ut ¼ �tk̂ðptÞ ¼ �tk̂t; (7)
where k̂t � k̂ðptÞ. While we basically consider the case inwhich � � 0, such as a positive-definite power spectrum inSec. IV, we will also provide relevant expressions forgeneral cases with unconstrained signature of �, whichmay be useful for the analysis of more general aspects,such as the gravitational-wave polarization.Our primary task in the data analysis is to estimate the
true parameter ð�t; ptÞ of the target signal from the con-taminated data,
� ¼ ut þ �; (8)
which we can observe in reality. A standard and efficientprescription is the likelihood analysis, in which templatefamilies are prepared to fit the data. In this study, the
template is given by �k̂ðpÞ with two parameters ð�; pÞ,and we define the inner product
M IIð�; p;�Þ � �f�� �k̂ðpÞ; �� �k̂ðpÞg; (9)
which is closely related to the distance [21] between the
data � and the template �k̂ðpÞ. For a given noise vector �,we regardMII as a continuous function on the two dimen-sional plane ð�; pÞ, and search the point ð�; pÞ ¼ ð�bf ; pbfÞ
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-2

where the functionMII takes the globally maximum valuein the data analysis. Here, the subscript ‘‘bf’’ stands for‘‘best fit.’’
The inner product MII is a quadratic function of theamplitude �, and can be written as
M IIð�;p;�Þ ¼ �ð�� f�; k̂ðpÞgÞ2 þ f�; k̂ðpÞg2 � f�;�g:(10)
The first term is the only term dependent on �, and we canalways set this term to zero by appropriately choosing �.Therefore, we initially search the index p ¼ pbf where the
inner product MIðp;�Þ � f�; k̂ðpÞg takes its global maxi-mum [22], and assign the best-fit amplitude as
�bf ¼ f�; k̂ðpbfÞg ¼ MIðpbf;�Þ: (11)
This procedure is essentially the same as the matched
filtering analysis with the normalized templates k̂ðpÞ andthe Wiener filter f�; k̂ðpÞg (see, e.g., [8]). The simplerelation Eq. (11) between the amplitude �bf and the peakvalue MIðpbfÞ turns out to be useful later. Hereafter, weomit the argument � of MII and MI for simplicity. Thesubscripts ‘‘I’’ and ‘‘II’’ represent the dimensions of thefitting parameters [‘‘I’’ for the single parameter p and ‘‘II’’for the two parameters ð�; pÞ].
The estimated values ð�bf ; pbfÞ depend on specific real-ization of the noise �, and are scattered around the truevalues ð�t; ptÞ. Therefore, they should be regarded as sta-tistical variables fluctuating in response to the realizationsof the noise vector �. Our primary interest in this paper isthe probability distribution function of the estimatedparameters ð�bf ; pbfÞ.
At the global solution ð�; pÞ ¼ ð�bf ; pbfÞ obtained for agiven noise vector �, the functionMI meets the followingrelations required for a local peak:
@pf�; k̂ðpÞg ¼ 0; @2pf�; k̂ðpÞg< 0; (12)
as necessary conditions [23]. However, the local relationsEq. (12) are not the sufficient conditions for the globalmaximum of the functionMIðpÞ, as it might have multiplepeaks for a single realization of the noise �. With multiplepeaks, it is necessary to select the global maximum inactual data analysis.
Nevertheless, it was shown in [13] (see Fig. 3 in thatpaper) that numerical results for distribution of the globalpeaks of likelihood surfaces can be reproduced well by alocal expression that actually counts the stationary pointsof the surfaces. Based on this observation, the aims of thispaper are (i) to geometrically develop an analytical frame-work for the local peak statistics in simplified one-dimensional cases, and (ii) to apply it for the correlationanalysis of GW backgrounds, as a realistic example.
In our local approach, we unavoidably count thecontribution of more than one peaks of the functionMIðpÞ. In general, it is difficult to analytically handle
global properties of complicated functions (see, e.g.,[24]). On the other hand, between two adjacent peaks ofa one-dimensional function, we must have a valley (localminimum) with the relations
@pf�; k̂ðpÞg ¼ 0; @2pf�; k̂ðpÞg> 0; (13)
because of the continuity of the function @pf�; k̂ðpÞg.These two are local conditions, and can be managed ana-lytically. We thus analyze the distribution of the valleysthat would supplementary help us to discuss the multi-plicity of the solutions p for the local peaks Eq. (12).Next, based on the above discussions on the peaks and
valleys of the one-dimensional function MIðpÞ, weexpand our considerations to the local geometry on thetwo-dimensional surface MIIð�; pÞ. Here, it should benoted that the cross section of the surface MIIð�; pÞ at afixed parameter p has a parabolic shape convex upwardwith @2MII=@�
2 ¼ �2< 0. Therefore, no local mini-mum on the two dimensional surface MIIð�; pÞ appears.Indeed, the parabolic shape along the amplitude � is theuniversal feature of any dimensional likelihood surface aslong as normalized template families are adopted.For a solution p ¼ ppk of the local peak conditions
Eq. (12), we assign the corresponding amplitude by �pk ¼MIðppkÞ. Then, the functionMIIð�; pÞ turns out to have alocal peak at ð�pk; ppkÞ as easily seen from Eq. (10). In the
same manner, we can assign the amplitude �vl ¼ MIðpvlÞfor a solution p ¼ pvl of the local valley conditionsEq. (13). Although the function MIIð�; pÞ becomes asaddle point (not a local minimum) at the point ð�vl; pvlÞ,we continue to use the suffix ‘‘vl’’ originally defined for thevalleys of the one-dimensional functionMIðpÞ in this two-dimensional case.Although we only deal with the data � of real numbers
in this paper, it is straightforward to expand our formalismfor complex data with random Gaussian noises. For com-plex vectors a and b, the inner product Eq. (3) should bemodified as
fa; bg ¼ 1
2
X�
a�b�� þ a��b��2
�
; (14)
and the elementsD� andN should be modified to includeboth real and imaginary contributions of the noise, �. Theamplitude � should also be regarded as a complex variable,and we can still make similar arguments for parameterestimation based on the relation
M II ¼�j�� f�; k̂ðpÞgj2 þ jf�; k̂ðpÞgj2 � f�;�g: (15)
III. DENSITIES OF LOCAL PEAKS
As commented earlier, our data � ¼ �tk̂ðptÞ þ � con-tain the noise � that results in fluctuating the positions ofthe local peaks. Now, let us consider an ensemble of thenoise vectors � whose probability distribution function isgiven by Eq. (4). For each realization of the noise vector �,
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-3

we can pick up all the local peaks for the fluctuatedfunction MIðpÞ. Here the total number of the local peaksis not necessarily unity. Next, for the ensemble of thenoises vectors, we statistically handle the spatial distribu-tions of the local peaks. In this manner we can evaluate theexpected number of the local peaks in a small parameterrange ½p; pþ �p� and express it in the form
�pkðpÞ�p: (16)
Due to its definition, we can regard �pkðpÞ as the expectednumber density of the local peaks.
Similarly, we put the expected number of the local peaksfor the function MIIð�; pÞ in a two-dimensional region½�; �þ ��� � ½p; pþ �p� by
�pkð�; pÞ���p (17)
with the corresponding number density �pkð�; pÞ. In this
section, basically following [13], we derive analytical ex-pressions �pkðpÞ as well as �pkð�; pÞ for the expectation
values of the local peaks. Considering potential multiplic-ity of the local peaks, we call these functions as densities,rather than the probabilities (that should be normalized tounity).
Here it is important note that (i) the global peaks aresubclasses of the local peaks and (ii) our density distribu-tions �pkðpÞ and �pkð�; pÞ would provide upper limits for
the probability distributions of the global ones. In the samemanner, we denote the expected number densities of localvalleys (and saddles) by �vlðpÞ and �vlð�; pÞ.
In this section, we do not use the concrete form of the
normalized template k̂ðpÞ. Therefore, our results in thissection can be generally applicable for estimation of asingle parameter p and the associated amplitude �, throughthe relation (10) under presence of Gaussian noises.
A. Formal expressions
First, we introduce the simplified notations kðiÞðpÞ(i ¼ 0, 1, 2) below
kðiÞðpÞ � @ipk̂ðpÞ (18)
for the derivatives of the unit template vector k̂ðpÞ withkð0Þ � k̂ for i ¼ 0.
For a given noise vector �, we can count the numberN ðp;�Þ�p of the local peaks in the parameter range
½p; pþ �p� for the function MIðpÞ ¼ fk̂ðpÞ; �g as (see,e.g., [13,24,25])
N ðp;�Þ�p ¼Z pþ�p
pdp�D½@pMIðp;�Þ�
� T½�@2pMIðp;�Þ�; (19)
where �D is the delta function and we defined the function
TðxÞ ¼(0 ðx � 0Þx ðx > 0Þ : (20)
In Eq. (19), the delta function represents the condition forthe extremum @pMI ¼ 0, and we temporarily recover the
argument � for the function MI in order to clarify itsdependence on the noise. The function T selects the sign@2pM< 0 appropriate for a peak, and also fixes the mea-
sure associated with the delta function. Taking account ofthe probability distribution of the noise �, the expectednumber of the local peaks is given by
�pkðpÞ�p ¼Z
D�Pð�ÞN ðp;�Þ�p
¼ �pZ
D�Pð�Þ�D½@pMIðpÞ�T½�@2pMIðpÞ�;(21)
or equivalently
�pkðpÞ ¼Z
D�Pð�Þ�D½fkð1ÞðpÞ; �g�T½�fkð2ÞðpÞ; �g�:(22)
In the same manner, the density of the local valleys isgiven by
�vlðpÞ ¼Z
D�Pð�Þ�D½fkð1ÞðpÞ; �g�T½fkð2ÞðpÞ; �g�:(23)
As for the two-dimensional density distribution of thelocal peaks and saddles (with the subscript ‘‘vl’’), we havesimilar expressions
�pkð�; pÞ ¼Z
D�Pð�Þ�Dð�� fk̂; �gÞ�D½fkð1Þ; �g�� T½�fkð2Þ; �g� (24)
and
�vlð�; pÞ ¼Z
D�Pð�Þ�Dð�� fk̂; �gÞ�D½fkð1Þ; �g�� T½fkð2Þ; �g�: (25)
The above expressions (22)–(25), are written as multidi-mensional integralsD� for the noise vector�. However, for agiven parameter p, only the following three inner products
N0 � fk̂ðpÞ; �g, N1 � fkð1ÞðpÞ; �g and N2 � fkð2ÞðpÞ; �g arerelevant in Eqs. (24) and (25). For Eqs. (22) and (23), we needto deal with only the two combinations N1 and N2.The variablesN0, N1, and N2 are specific linear combina-
tions of the large-dimensional vector �. Therefore, the actualdimensions of the integralD� can be reduced down to 3 or 2[13]. If each component �� of the noise vector is Gaussian,the probability distribution function PðN0; N1; N2Þ is com-pletely determined by their covariance matrix hNiNji. Fromthe definition of the inner product, we have
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-4

hNiNji ¼ hfkðiÞðpÞ; �gfkðjÞðpÞ; �gi ¼ CijðpÞ; (26)
where we defined
Cij ¼ Cji � fkðiÞðpÞ; kðjÞðpÞg: (27)
From the normalization fk̂; k̂g ¼ 1 of the templates, we read-ily have C10 ¼ 0 and C11 þ C20 ¼ 0. We also define the
productDiðpÞ between the vector kðiÞðpÞ and the unit vectork̂t � k̂ðptÞ for the true index pt as
DiðpÞ � fkðiÞ; k̂tg ¼ @ipD0ðpÞ: (28)
Integrating out irrelevant noise elements in Eq. (22), thedensity �pkðpÞ is given by
�pkðpÞ ¼Z
dN1dN2PðN1;N2Þ�D½N1 þ�tD1��T½��tD2 �N2�: (29)
While we can directly manage this expression, the covari-ance C21 � 0 between N1 and N2 is somewhat cumber-some for polynomial deformations [26]. Below, we take a
different route by introducing the new unit vector k̂othdefined by
k̂ othðpÞ � C11kð2Þ � C21k
ð1ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiC11ðC22C11 � C2
21Þq (30)
that satisfies fk̂oth; k̂othg ¼ 1 and is orthogonal to the vector
kð1Þ as fk̂oth; kð1Þg ¼ 0.
The original vector kð2Þ is given by kð1Þ and k̂oth as
kð2ÞðpÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiC11ðC22C11 � C2
21Þq
k̂oth þ C21kð1Þ
C11
: (31)
We hereafter use k̂oth instead of kð2Þ, and define the prod-ucts Xi and Y by
XiðpÞ � fkðiÞ; k̂othg; YðpÞ � fk̂t; k̂othg: (32)
They are given by the products Cij and Di as
X0 ¼ � C211ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
C11ðC11C22 � C221Þ
q ; X1 ¼ 0;
X2 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiC11C22 � C2
21
C11
s (33)
and
Y ¼ C11D2 � C21D1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiC11ðC22C11 � C2
21Þq ¼ D2
X2
� C21D1
X2C11
: (34)
We also introduce the new stochastic variable Noth as
Noth ¼ fk̂oth; �g ¼ N2
X2
� C21N1
X2C11
: (35)
We have hNoth; N1i ¼ fk̂oth; kð1Þg ¼ 0 and hNoth; N0i ¼fk̂oth; kð0Þg ¼ X0. Then the covariance matrix betweenðN0; N1; NothÞ is given by
F ¼hN0N0i hN0N1i hN0NothihN1N0i hN1N1i hN1NothihNothN0i hNothN1i hNothNothi
0BB@
1CCA
¼1 0 X0
0 C11 0
X0 0 1
0BB@
1CCA:
(36)
Taking inverse of the relevant parts of the matrix, we havethe probability distribution functions as
PðN1;NothÞ¼ 1
2�ffiffiffiffiffiffiffiffiC11
p exp
�� N2
1
2C11
�exp
��N2
oth
2
�(37)
and
PðN0; N1; NothÞ ¼ 1
ð2�Þ3=2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiC11ð1� X2
0Þq
� exp
��N2
oth þ N20 � 2X0N0Noth
2ð1� X20Þ
�
� exp
�� N2
1
2C11
�: (38)
From the formal expression (22), we eliminate thevariables N2 and D2 using Eqs. (34) and (35), and obtain
�pkðpÞ ¼Z
dN1dNothPðN1; NothÞ�D½�tD1 þ N1�� T½�X2ð�tY þ NothÞ � C21ð�tD1 þ N1Þ=C11�:
(39)
By performing the N1 integral first, we find
�pkðpÞ ¼ 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffi2�C11
p exp
���2
tD21
2C11
�X2Fpkð��tYÞ (40)
with
FpkðaÞ �Z 1
�adx
ðxþ aÞe�ðx2=2Þffiffiffiffiffiffiffi2�
p (41)
¼Z 1
0dx
xe�ððx�aÞ2=2Þffiffiffiffiffiffiffi2�
p (42)
¼ a
2erfc
�� affiffiffi
2p�þ e�ða2=2Þffiffiffiffiffiffiffi
2�p : (43)
Here, the first factor expð��2tD
21=2C11Þ originates from the
delta function for a stationary point, and is closely related
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-5

to the Fisher matrix prediction (see the next subsection). InEq. (43) we used the complementary error function
erfcðxÞ � 1� erfðxÞ ¼ 2R1z e�t2dt=
ffiffiffiffi�
p. In the same man-
ner we obtain the density of the local valleys as
�vlðpÞ ¼ 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffi2�C11
p exp
���2
tD21
2C11
�X2Fvlð��tYÞ (44)
with
FvlðaÞ �Z �a
�1dx
�ðxþ aÞe�ðx2=2Þffiffiffiffiffiffiffi2�
p : (45)
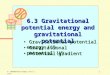
The two functions Fpk and Fvl are plotted in Fig. 1. We can
easily derive the following relations
FpkðaÞ ¼ Fvlð�aÞ; FpkðaÞ � FvlðaÞ ¼ a;
Fpkð0Þ ¼ Fvlð0Þ ¼ 1ffiffiffiffiffiffiffi2�
p ; lima!1
FpkðaÞa
¼ 1:(46)
We have �pk=�vl ¼ Fpk=Fvl for the relative abundances of
the peaks and valleys. The number of peaks dominates thatof the valleys at ��tY > 0.
The two dimensional density profiles �pkð�; pÞ and
�vlð�; pÞ can be evaluated similarly as
�pkð�;pÞ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1�X2
0
q2�
ffiffiffiffiffiffiffiffiC11
p exp
���2
tD21
2C11
�exp
��ð���tD0Þ2
2
�
�X2Fpk
���tYþX0ð���tD0Þffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1�X20
q �; (47)
�vlð�;pÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1�X2
0
q2�
ffiffiffiffiffiffiffiffiC11
p exp
���2
tD21
2C11
�exp
��ð���tD0Þ2
2
�
�X2Fvl
���tYþX0ð���tD0Þffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1�X20
q �; (48)
and we have the following identity between �pkðpÞ and�pkð�; pÞ
�pkðpÞ ¼Z 1
�1d��pkð�; pÞ (49)
due to the simple structure for the amplitude parameter �.
While we have introduced the orthogonal vector k̂oth tosimplify the covariance noise matrix (36), we can directlyreach Eqs. (40), (44), and (47) from the original expres-sions (22)–(24).We evaluate the mean value of the peak amplitude � as
follows
�� pkðpÞ �R1�1 ��pkð�; pÞd�
�pkðpÞ (50)
¼ �tD0 � X0
1þ erfð��tY=ffiffiffi2
p Þ2Fpkð��tYÞ : (51)
Here the first term �tD0 is the simple average of the
product fk̂ðpÞ; �g ¼ �tD0ðpÞ þ N0 with respect to thenoise N0. The second one is a positive definite term witha negative factor X0 ¼ Oð1Þ, and represents the bias causedby selecting only peaks. Due to the negative correlationhN0N2i ¼ �hN1N1i< 0 between the two noise compo-nents N0 and N2, the requirement for being a peak (related
to N2) introduces the bias for the product fk̂ðpÞ; �g ¼�tD0ðpÞ þ N0.As mentioned earlier, at actual data analysis, we initially
search the point p ¼ pbf where the product MI ¼fk̂ðpÞ; �g takes the global maximum. Even if our targetpoints are shifted to the local peaks of the functionMIðpÞ,instead of the global peak, it is expected that the productMIðpÞ would take relatively large values for local peaksaround the true parameter pt but smaller values for thosegenerated merely by statistical fluctuations at points distantfrom pt. In this manner, the magnitude of the productMIðpÞ at a local peak would become in itself an usefulindicator for our theoretical analysis purely based on localquantities. Here we introduce the notation MIpk for the
value ofMIðppkÞ at a local peak and distinguish it from the
original one-dimensional function MIðpÞ.We thus consider the expected number of local peaks
in the parameter range ½p; pþ �p� and the peakheight ½MIpk;MIpk þ �MIpk�, and denote it by
spkðMIpk; pÞ�p�MIpk. Following the arguments around
Eqs. (19)–(22) we have
spkðMIpk;pÞ �Z
D�Pð�Þ�DðMIpk �fk̂;�gÞ�D½fkð1Þ;�g��T½�fkð2Þ;�g�: (52)
But the expression (52) is essentially the same as Eq. (24)
spkðMIpk; pÞ ¼ �pkð� ¼ MIpk; pÞ (53)
due to the simple correspondence between the estimatedamplitude� and the inner productMI as shown in Eq. (11).Therefore, we can use the density distribution �pkð�; pÞ
10 5 0 5 1010 4
0.001
0.01
0.1
1
10
a
Fpk
,Fvl
FpkFvl
FIG. 1 (color online). The functions FpkðaÞ and FvlðaÞ fordensities of local peaks and valleys.
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-6

also for the function spkðMIpk; pÞ. Once the curves
spkðMIpk; p1Þ and spkðMIpk; p2Þ are given for two differ-
ent values p ¼ p1 and p2, we can apply the relationR1�1 dysðy; pÞ ¼ �pkðpÞ [see Eq. (49)] to compare the
relative densities of �pkðp1Þ and �pkðp2Þ by eye, based
on the areas of the two curves.The unimportant peaks due to noises at an index p
distant from the true value pt would mostly have lowpeak heights and would be efficiently removed by choosingan appropriate threshold on MIpk, as demonstrated later.
To elucidate this, we define the density of local peaksabove a given threshold by
�pkð>MIpk; pÞ �Z 1
MIpk
dysðy; pÞ ¼Z 1
MIpk
d��pkð�; pÞ:(54)
As commented earlier, we first searched maximums ofthe function MIðpÞ instead of jMIðpÞj, considering therequirement � � 0 valid, e.g., for the estimation of a powerspectrum that is a positive definite quantity (as analyzed inthe next section). If we literally evaluate the local peaks/valleys for the functionMIIð�; pÞ without the prior � > 0,they are given with our expressions (47) and (48) as
�pkð�; pÞð�Þ þ �vlð�; pÞð��Þ;�pkð�; pÞð��Þ þ �vlð�; pÞð�Þ;
(55)
respectively. Here ðxÞ is the step function. Similarly, thelocal peaks and valleys of the function jMIðpÞj areobtained asZ 1
�1d�½�pkð�; pÞð�Þ þ �vlð�; pÞð��Þ�;
Z 1
�1d�½�pkð�; pÞð��Þ þ �vlð�; pÞð�Þ�: (56)
Here, we should notice that the roles of peaks and valleysof the function MIðpÞ interchange for the absolute valuejMIðpÞj at MIðpÞ< 0. While we do not use these some-what complicated expressions (55) and (56), these wouldbe more adequate, depending on problems.
B. Large SNR limit
It is well known that, with a large SNR, the distributionof the parameters estimated by the matched filtering is wellapproximated by the Fisher matrix predictions around theirtrue values [9,10,12]. In this subsection, we examine theprofiles of our density distribution functions �pkðpÞ and�pkð�; pÞ at larger �t. Similar analyses were already done
in [13], but it would be instructive to directly examine ouranalytic expressions obtained in the previous subsection.
We first expand the fitting parameter around their truevalues and define the deviations as
�p � p� pt; �� � �� �t: (57)
Then, taking the leading order term with respect to �p, weobtain
D0 ’ 1; D1 ’ �C11t�p; D2 ’ �C11t (58)
and
Y ’ �C211tffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
C11tðC22tC11t � C221tÞ
q < 0 (59)
where the product Cijt ¼ fkðiÞðptÞ; kðjÞðptÞg is evaluated at
the point p ¼ pt. With the asymptotic relation FpkðaÞ � a
at a ! 1, the expressions (40) and (47) for the local peakscan be approximated as
�pkðpÞ ’ 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2�C�1
11t��2t
q exp
�� �p2
2C�111t�
�2t
�(60)
and
�pkð�;pÞ’ 1
2�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiC�111t�
�2t
q exp
�� �p2
2C�111t�
�2t
�exp
��ð��Þ2
2
�
(61)
for small j�pj and j��j and at �t 1.Meanwhile we have the Fisher matrix for the two
parameters � and p at their true values as
f@�ð�k̂Þ;@�ð�k̂Þg f@�ð�k̂Þ;@pð�k̂Þgf@pð�k̂Þ;@�ð�k̂Þg f@pð�k̂Þ;@pð�k̂Þg
0@
1A
�t;pt
¼ 1 0
0 �2tC11t
!:
(62)
It is straightforward to confirm that the Fisher matrixpredictions agree with our expressions (60) and (61) origi-nally given for the local peaks. We hereafter denotethe right-hand sides of these equations by �fisherðpÞ and�fisherð�; pÞ.At �t ! 1, the Gaussian distribution �fisherðpÞ is
strongly localized around �p ¼ 0 with the characteristicwidth / ��1
t . Therefore it would be advantageous to usethe rescaled variable x � �t�p to analyze the shape of thefunction �pkðpÞ relative to �fisherðpÞ. After some algebra,
we can derive the following perturbative expression.
�pkðpÞ ¼ �fisherðpÞ þ �0tðxÞ þ H:O: (63)
Here we have �fisherðpÞ / �t and the higher order termH.O. is given by a polynomial of x whose coefficientsare at most Oð��1
t Þ. The leading-order correction termðxÞ is given by
ðxÞ ¼ C21tffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2�C11t
p exp
��C11tx
2
2
��x� C11t
2x3�: (64)
Thus, with the rescaled variable x, the difference �pkðpÞ ��fisherðpÞ asymptotically approaches the fixed function
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-7

ðxÞ at �t ! 1. In Sec. VD, we demonstrate thisnumerically.
In order to characterize the shape of the function �pkðpÞ,we evaluate its zeroth, first, and second moments by takingintegrals. Since ðxÞ is an odd function, we can derive thefollowing results;Z
�pkðpÞd�p ¼ 1þOð��2t Þ; (65)
Z�pkðpÞ�pd�p ¼ � 1
2��2t C21tC
�211t þOð��3
t Þ; (66)
Z�pkðpÞð�pÞ2d�p ¼ C�1
11t��2t þOð��4
t Þ: (67)
These would be used in Sec. VD. Because of the normal-ization condition (65), the right-hand-side of Eq. (66) canbe regarded as the estimation bias of the primary parameterp. In the same manner, we have the bias for the mean valuefor the overall amplitudeZ
�pkðpÞ½ ��pkðpÞ � �t�d�p ¼ 1
2�t
þOð��2t Þ: (68)
Note that the term 1=ð2�tÞ is a second order correctionOð��2
t Þ relative to the true amplitude �t. The parametersestimated by the maximum likelihood method generallyhave biases from the second order Oð��2
t Þ (see [27] for aperturbative analysis) and those in Eqs. (66) and (68) agreewith results obtained from perturbative expressions for theeffects of the noises [e.g., Eq. (A31) in [10]].
IV. CORRELATION ANALYSIS FOR STOCHASTICGW BACKGROUNDS
Hereafter, we apply our formal studies to correlationanalysis of gravitational wave background [19,20]. In thissection, we first describe basic aspects of the correlationanalysis, and mention its correspondence to the data analy-sis prescription discussed in Secs. II and III. Then weprovide expressions that would be useful for numericallyevaluating the local peak/valley densities for parameterestimation of GW backgrounds with power-law spectra.
A. Data correlation
We discuss observation of an isotropic stochastic GWbackground with two L-shaped detectors I and J in anobservational period Tobs. The Fourier modes of two datastreams sI;JðfÞ are linear combinations of the responses to
the background signal hI;JðfÞ and the detector noises
nI;JðfÞ assIðfÞ¼hIðfÞþnIðfÞ; sJðfÞ¼hJðfÞþnJðfÞ: (69)
We assume that the detector noises nIðfÞ and nJðfÞ arestationary with no correlation between them [namelyhnIðfÞ�nJðf0Þi ¼ 0]. We define the noise spectra of thetwo detectors PIðfÞ and PJðfÞ in the following relations
hnIðfÞ�nIðf0Þi ¼ 1
2PIðfÞ�Dðf� f0Þ;
hnJðfÞ�nJðf0Þi ¼ 1
2PJðfÞ�Dðf� f0Þ: (70)
The responses hIðfÞ and hJðfÞ to the GW backgroundwould have correlation that is characterized by the overlapreduction function �IJðfÞ as
hhIðfÞ�hJðf0Þi ¼ 3H20�IJðfÞ
20�2f3�GWðfÞ�Dðf� f0Þ; (71)
where �GWðfÞ is the energy density of the GW back-ground in the logarithmic frequency interval and normal-ized by the critical density of the universe 3H2
0=8� (H0: the
Hubble parameter hereafter fixed at 70 km= sec =Mpc).The overlap reduction function �IJ depends strongly onthe relative configuration of the two detectors and is givenby the following angular integral [19,20]
�IJðfÞ ¼ 5
8�
ZS2dn½Fþ�
I FþJ þ F��
I F�J �
� exp½2�ifðxJ � xIÞ n� (72)
with the beam pattern functions Fþ;�I;J and the spatial posi-
tions of detectors xI;J. We have the upper limit j�IJj ¼ 1valid for co-aligned detectors.In this article we study the situations where the obser-
vational data sIðfÞ is dominated by the detector noises(jhIj � jnIj) as
3H20�GWðfÞ10�2f3
� PIðfÞ; PJðfÞ (73)
(weak signal condition). Under this condition, the correla-tion analysis becomes an efficient approach to examine aweak GW background.Following the prescription described in [28], we
divide the observational frequency band into finite seg-ments F� ( � ¼ 1; . . . ; L: the suffix for the segments)that have the widths �f� and the central frequencies f�.The widths �f� are selected to satisfy T�1
obs � �f� � f�so that, in each segment, (i) there are a large number(�f�=T
�1obs 1) of Fourier modes, and (ii) the frequency
dependencies can be neglected (�f�=f� � 1) for thefunctions, such as PIðfÞ, PJðfÞ, �IJðfÞ, and �GWðfÞ.These two conditions hold for the laser interferometerssuch as LIGO [1], Virgo [2], KAGRA [3], BBO [29,30],and DECIGO [31,32], but not for the pulsar timing experi-ments which are sensitive at f� T�1
obs. Meanwhile, we have
�IJðfÞ ¼ 0 for independent data streams of LISA [33,34].To statistically amplify the target background signals
and compress the data, we take the summation of thedata products in each segment � as
�� ¼ Re
� Xf2F�
sIðfÞ�sJðfÞ�: (74)
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-8

Here we decompose �� in terms of its mean value u� andstatistical fluctuation with zero mean �� as
�� ¼ u� þ ��: (75)
At this stage, we do not need to be aware of the relationbetween notations introduced here and in Secs. II and III.From Eq. (71) the mean u� is given by
u� � h��i ¼� Xf2F�
sIðfÞ�sJðfÞ�
¼ 3H20�IJðf�Þ�GWðf�Þ
20�2f3�
�f�T�1obs
: (76)
Note that the mean value of the summationPf2F�
sIðfÞ�sJðfÞ is a real number even without the opera-
tor Re½� in Eq. (74). This is the reason why we took thereal part of the product in Eq. (74) to dispose the irrelevantimaginary part of the fluctuation ��. With the weak signalcondition, the fluctuation �� is dominated by the detectornoises and its variance is given by
�2� ¼ h�2
�i ’��
Re
� Xf2F�
nIðfÞ�nJðfÞ��
2�
¼ PIðf�ÞPJðf�Þ �f�8T�1
obs
:(77)
In the last expression, we had an additional factor 1=2associated with the operator Re½� in Eq. (74). The productRe½nIðfÞ�nJðfÞ� at a single frequency f would not beGaussian distributed. However, due to a large number ofinvolved modes �f�=T
�1obs 1 in a segment and the cen-
tral limit theorem, the fluctuations �� for the compresseddata can be regarded as Gaussian.
Given the noise level ��, we can evaluate the SNR ofeach segment as
SNR2�¼ u2�
�2�
¼�3H2
0�IJðf�Þ10�2f3�
�2Tobs
2�f��GWðf�Þ2PIðf�ÞPJðf�Þ : (78)
Then the total SNR is given by a quadratic summation ofall the segments
SNR 2 ¼ XL�¼1
SNR2�
¼�3H2
0
10�2
�2Tobs
�2Z 1
0df
�IJðfÞ2�GWðfÞ2f6PIðfÞPJðfÞ
�:
(79)
Note that the final expression (79) does not depend on thedetails of the segmentation, and agrees with those in theliterature [19,20]. The total SNR in Eq. (79) is alsoexpressed as
SNR 2 ¼ fu; ug (80)
with the product defined in Eq. (3). Now the vectors�, u, �introduced in this section can be directly regarded as those
in Secs. II and III. Here, the dimension M of the vectors isthe number of the segments L.In this paper, as concrete models, we only deal with the
background spectra �GWðfÞ given in a power-law form
�GWðfÞ / fp (81)
in the frequency band observed by the detectors in interest.Here p is the spectral index in the band, and serves as thesingle intrinsic parameter in the previous sections. For themean value u� of the correlation analysis [see Eq. (76)], we
define the unit vector k̂ðpÞ whose components (includingsign information) are given as
k̂ �ðpÞ / 3H20�IJðf�Þ20�2f3�
f�p �f�T�1obs
(82)
with the normalization condition fk̂ðpÞ; k̂ðpÞg ¼ 1.Introducing the additional parameter �ð� 0Þ for the am-plitude of a GW background, we express the mean value of
the correlated data due to the background as u ¼ �k̂ðpÞ[35]. We can now apply the formal expressions derived inSec. III.In this paper, we only study the weak signal case with
two available detectors. But the expression (79) can beextended for stronger GW backgrounds by the followingreplacement [20]
PIðfÞPJðfÞ ! PIðfÞPJðfÞ þ 3H20
10�2
�GW
f3ðPI þ PJÞ
þ�3H2
0
10�2
�2 �2
GW
f6ð1þ �2
IJÞ: (83)
For correlation analysis with more than two independentdetectors, the optimal SNR is given by a summation ofEq. (79) with respect to all the possible pairs of detectors.Hereafter, for notational simplicity, we omit the sub-
scripts I and J for our two detectors, and use expressions,such as � ¼ �IJ.
B. Shape function
As shown in Eqs. (40), (44), and (47), our expressionsfor the local peaks and valleys are given by the innerproducts Cij and Di [see Eqs. (27) and (28) for their
definitions]. Here, note that, with Eqs. (33) and (34), theparameters Xi and Y are written in terms of Cij and Di. In
this section, we provide simple formulas that would beeasily applicable when numerically evaluating the basicingredients Cij and Di for the power law spectra �GW /fp, as in the next section.SinceCij andDi are defined by the inner products of two
unit vectors and their derivatives with respect to the spec-tral indexes [see Eqs. (27), (28), and (82)], they should begenerated from the integrals
Z 1
0df
�ðfÞ2fxf6PIðfÞPJðfÞ
(84)
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-9

and its (up to the fourth) derivatives with the parameter x.Therefore, we define the following five functions (i ¼ 0, 1,2, 3, 4)
wiðxÞ � AZ 1
0df
�ðfÞ2ðf=fcÞxðln½f=fc�Þif6PIðfÞPJðfÞ
: (85)
Here the frequency fc is a characteristic frequency in theobservational band in interest, and should be set arbitrarily.For convenience at later discussions, we fix the normaliza-tion factor A by the condition
w0ð0Þ ¼ 1 (86)
or equivalently put
wiðxÞ ¼R10 df �ðfÞ2ðf=fcÞxðln½f=fc�Þi
f6PIðfÞPJðfÞR10 df �ðfÞ2ðf=fcÞ0
f6PIðfÞPJðfÞ: (87)
Once the lowest-order function w0ðxÞ is given numerically(e.g., with a fitting formula as in the next section), wecan generate other ones (for i ¼ 1; . . . ; 4) by taking deriva-tives as
wiðxÞ ¼ @ixw0ðxÞ: (88)
We call w0ðxÞ as the shape function. This function dependson the profile of the noise spectra PI;JðfÞ, the overlap
reduction function �ðfÞ, and the selected frequency fc.Under the simple geometrical representation for the signal
vector �k̂ðpÞ with the amplitude parameter �, most of theprincipal information relevant for our analyses is includedin the shape function.
Now we express the product Cij ¼ fkðiÞðpÞ; kðjÞðpÞg interms of wiðxÞ. Here we need to call the functions wiðxÞonly at x ¼ 2p, and define
mi � wið2pÞ (89)
to simplify our expressions. After some algebra, we canderive
C11 ¼ m2m0 �m21
m20
;
C21 ¼ 2m31 � 3m2m1m0 þm3m
20
m30
;
C22 ¼ �3m41 þ 6m2m
21m0 � 4m3m1m
20 þm4m
30
m40
:
(90)
These combinations do not depend on A and fc, as ex-pected from the simple geometric meanings of the normalvectors.
In order to evaluate Di related to the true vector k̂t ¼k̂ðptÞ, we similarly define the elements m0t and li by
m0t � w0ð2ptÞ; li � wiðpþ ptÞ: (91)
Then we have
D0 ¼ l0
ðm0tm0Þ1=2; D1 ¼ �m1l0 þm0l1
ðm0tm30Þ1=2
;
D2 ¼ 3m21l0 � 2m1m0l1 þm0ðm0l2 � 2m2l0Þ
ðm0tm50Þ1=2
:
(92)
So far, we have used the parameter � to represent theamplitude of the background. This is a geometrically natu-ral choice. But, in some cases, it might be preferable to putthe background spectrum in the form
�GWðfÞ ¼ !GW
�f
fc
�p; (93)
and use the combination of the parameters ð!GW; pÞ fordiscussing prospects of correlation analysis, instead of theoriginal one ð�; pÞ. Below, we summarize expressionsrelated to these two parametrizations. From Eq. (79), thetwo amplitudes � and !GW are related by
�2 ¼�3H2
0
10�2
�2Tobs!
2GW
�2Z 1
0df
�ðfÞ2�ffc
�2p
f6PIðfÞPJðfÞ�: (94)
Since the shape function w0ðxÞ is normalized as
w0ðxÞ ¼R10 df �ðfÞ2ðf=fcÞx
f6PIðfÞPJðfÞR10 df �ðfÞ2ðf=fcÞ0
f6PIðfÞPJðfÞ; (95)
we have
� ¼ B!GWT1=2obs ½w0ð2pÞ�1=2 (96)
with a constant factor B that is determined by the noisespectra and the overlap reduction function as
B ��2
�3H2
0
10�2
�2 Z 1
0df
�ðfÞ2f6PIðfÞPJðfÞ
�1=2
: (97)
From the basic property of the delta function, the density�0
pkð!GW; pÞ of the local peaks in the parameter space
ð!GW; pÞ is expressed with the density �pkð�; pÞ definedfor the original space ð�; pÞ as
�0pkð!GW; pÞ ¼
Z 1
�1d��pkð�; pÞ
� �D
�!GW � �
B½Tobsw0ð2pÞ�1=2�
(98)
¼ BT1=2obs ½w0ð2pÞ�1=2�pkðB!GWT
1=2obs ½w0ð2pÞ�1=2; pÞ:
(99)
V. CORRELATION ANALYSIS WITH THEADVANCED LIGO
In this section, we evaluate our analytical expressionsfor the two 4 km Advanced-LIGO detectors, as a concreteexample of correlation analysis for stochastic gravitational
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-10

wave backgrounds. Throughout this section, we set thecharacteristic frequency fc at
fc ¼ 25 Hz (100)
for our power-law spectrum �GWðfÞ ¼ !GWð ffcÞp.
A. Basic quantities
Our aim in this subsection is to provide the shapefunction w0ðxÞ and related quantities for the twoAdvanced LIGO detectors. These are the preliminary cal-culations used for our main results given in the followingsubsections.
First, the overlap reduction function �ðfÞ in Eq. (72) isexpressed analytically as [19,20] (see also [36,37] forpolarized modes)
�ðfÞ ¼ �1ðy; �Þ cosð4�Þ þ�2ðy; �Þ cosð4�Þ: (101)
The parameter � is the angle between the two detectorsmeasured from the center of the Earth, and ð�;�Þ charac-terizes the orientations of the detectors relative to the greatcircle connecting the two sites. The variable y is given by
y � 2�fD
c(102)
with the distance D ¼ 2RE sinð�=2Þ (RE ¼ 6400 km: theradius of the Earth). The two functions �1 and �2 arewritten as
�1ðy; �Þ ¼ cos4��
2
��j0 þ 5
7j2 þ 3
112j4
�(103)
�2ðy; �Þ ¼�� 3
8j0 þ 45
56j2 � 169
896j4
�
þ�1
2j0 � 5
7j2 � 27
224j4
�cos�
þ�� 1
8j0 � 5
56j2 � 3
896j4
�cosð2�Þ (104)
with the spherical Bessel functions jn ¼ jnðyÞ. We havethe upper limit j�j � 1 and the equality here holds only fortwo co-aligned detectors (mod �=2) at a same place(j cos4�j ¼ 1 and � ¼ 0).
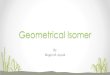
For the two LIGO detectors, the angular parameters are� ¼ 27:2�, � ¼ 45:3�, and � ¼ 62:2�, and we show thefunction � in Fig. 2. Due to their arranged configuration,we have relatively large value j�j � 0:8 at the low fre-quency regime f ! 0. The magnitude j�j decreases atf * 50 Hz, where the wavelength of gravitational wavesbecomes comparable or smaller than the separation Dbetween the two detectors.
For the noise spectra PðfÞ ¼ PIðfÞ ¼ PJðfÞ of theAdvanced LIGO detectors, we use a fitting formula fortheir broadband configuration given in Table I. Now, thefunctions wiðxÞ (i ¼ 0; . . . ; 4) can be numerically eval-uated with Eq. (87), and the shape function w0ðxÞ is
presented in Fig. 3. Because of our choice at fc ¼ 25 Hz,the curve is nearly flat around x ¼ 0. For convenience atreproducing our numerical results below, we provide afitting formula for the shape function
w0;fitðxÞ ¼ 5:21169� 10�8x11 þ 3:20583� 10�7x10
þ 1:01176� 10�6x9 þ 5:77855� 10�6x8
þ 0:0000303052x7 þ 0:000177148x6
þ 0:000517451x5 þ 0:00412307x4
þ 0:00506169x3 þ 0:0850738x2 þ 0:0458547x
þ 1:00000 (105)
valid in the range x 2 ½�2; 2�. While we use more accurateinterpolation method for the functions wiðxÞ throughoutthis paper, even the fourth derivative @4xw0;fitðxÞ well
approximates the accurate result w4ðxÞ with error lessthan 0.5% in the range x 2 ½�2; 2�.We also evaluate the factor B defined in Eq. (97) and
obtain the scaling formula
� ¼ 1:536
�!GW
10�9
��Tobs
108 sec
�1=2½w0ð2pÞ�1=2 (106)
for the two Advanced LIGO detectors. This equation re-lates the amplitude !GW of the spectrum with the SNR �.
B. Correlation functions
From the numerical results wiðxÞ (i ¼ 0; . . . ; 4), we cancalculate the products Cij and Di using the expressions in
0 50 100 150 2001.0
0.5
0.0
0.5
1.0
f Hz
FIG. 2 (color online). The overlap reduction function � for thetwo LIGO detectors (Hanfordþ Livingston).
TABLE I. A fitting formula for the noise spectrum of theAdvanced LIGO detectors (broadband configuration) given in[36].
Frequency regime [Hz] Noise spectrum ½Hz�1�10 � f � 240 10�44ðf=10 HzÞ�4þ
10�47:25ðf=100 HzÞ�1:7
240 � f � 3000 10�46ðf=1000 HzÞ3Otherwise 1
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-11

Sec. IV. In this subsection, we evaluate various correlationfunctions that appear in our analytical expressions forthe local peaks/valleys densities presented in Sec. III.Hereafter we assume that the true GW background has aflat spectrum (namely, pt ¼ 0).
As discussed in Sec. III A, the inner product MIðpÞbetween the data � ¼ �tk̂ð0Þ þ � and the normalized tem-
plate k̂ðpÞ is given by the mean value �tD0ðpÞ and the noisepart N0ðpÞ as
M I ¼ f�; k̂ðpÞg ¼ �tD0ðpÞ þ N0ðpÞ (107)
where we explicitly show the dependence on the spectralindex p as
D0ðpÞ ¼ fk̂ð0Þ; k̂ðpÞg; N0ðpÞ ¼ f�; k̂ðpÞg: (108)
The mean value D0ðpÞ is identical to the correlation
between the true unit vector k̂ð0Þ and the trial template
k̂ðpÞ. As shown in Fig. 4, this function takes the maximumvalue D0 ¼ 1 at p ¼ pt ¼ 0, and approaches 0 at largerjpj. In the same figure, we also show the quantitiesD1=
ffiffiffiffiffiffiffiffiC11
pand Y. These directly appear in the expressions
for the peak/valley densities �pkðpÞ and �vlðpÞ [see
Eqs. (40) and (44)], and also approach 0 at large jpj. Theparameter Y characterizes the relative abundances of thelocal peaks and valleys through the functions Fpk and Fvl,
and they take similar densities at Y � 0.Around the true value p ¼ 0, we have Y < 0. At
�t ! 1, we need a high-� noise Noth >��tY > 0 tomake a valley by inverting the sign of the second derivativeof the product MIðpÞ against the background level �tY[see Eq. (39) for a related expression]. This results in asignificant reduction of the valley density �vlðpÞ aroundp ¼ 0, compared with the peak density �pkðpÞ, as shownin the next subsection.
In Fig. 4, we took the plot range up to jpj � 7 where theGW backgrounds become extremely blue or red, and, atthese ends, it would be unreasonable to assume a singlepower-law spectrum�GWðfÞ in the whole LIGO band. But
results in these regime would be instructive to see qualita-tively how the correlation between the data and thetemplates affects the abundances of the local peaks andvalleys.The variance of the noise N0ðpÞ becomes unity
hN0ðpÞ2i ¼ 1, and its correlation hN0ðp1ÞN0ðp2Þi ¼fk̂ðp1Þ; k̂ðp2Þg at different points p1 and p2 is presentedin Fig. 5. The cross-section view at p1 ¼ 0 is identical tothe function D0ðpÞ shown in Fig. 4.
C. Densities of local peaks and valleys
Now we evaluate the statistical formulas for the localpeaks and valleys derived in Sec. III A. Hereafter, we usethe expressions (40), (44), (47), and (48), associated withthe local peaks and valleys of the function MIðpÞ [notEqs. (55) and (56) defined for jMIðpÞj].In Fig. 6, we plot the local peak density �pkðpÞ for the
intrinsic signal strengths �t ¼ 0, 1, 2, 4, and 8. For larger�t, the peak density shows stronger concentration around
6 4 2 0 2 4 6
0.5
0.0
0.5
1.0
p
D0
Y
D1 C111 2
FIG. 4 (color online). Correlation of two unit vectorsD0 ¼ fk̂ðpÞ; k̂ð0Þg, the ratio D1=
ffiffiffiffiffiffiffiffiC11
pand the inner product
Y ¼ fk̂ðpÞ; k̂othg related to the peak and valley abundances.
0.001
0.001
0.01
0.01
0.1
0.1
0.5
0.50.9
0.9
0.99
0.99
4 2 0 2 4
4
2
0
2
4
p1
p 2
FIG. 5 (color online). Correlation of noises hN0ðp1ÞN0ðp2Þi attwo points p ¼ p1 and p ¼ p2. We have the relationhN0ðp1ÞN0ðp2Þi ¼ fk̂ðp1Þ; k̂ðp2Þg.
6 4 2 0 2 4 60
1
2
3
4
x
w 0x
FIG. 3 (color online). The shape function w0ðxÞ for the corre-lation analysis with the two Advanced LIGO detectors.
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-12

the true value p ¼ 0. We can also observe increment of thedensity �pk around p * 6 where the ratio jD1=
ffiffiffiffiffiffiffiffiC11
p jdecreases again (see Fig. 4) in Eq. (40) with D1ðpÞ ¼@pD0ðpÞ ’ 0 reflecting D0ðpÞ ’ 0. Notice that the expo-
nential term of the right-hand side of Eq. (40) takes themaximum value at jD1=
ffiffiffiffiffiffiffiffiC11
p j ¼ 0 and the functionFpkð��tYÞ becomes a constant at Y ¼ 0. This increment
of �pk is mainly caused by the noise, as examined later.
We show the density of the local valleys in Fig. 6. Thisfunction is strongly suppressed by the Gaussian-like factorFvlð��tYÞ [see Eq. (45)] around the true value p ¼ 0.Therefore, for signal strength �t 1, it is very unlikelythat there exist multiple local peaks around p ¼ 0, sincewe must have a valley between two peaks. We can furtherexpect that the peak identified around p ¼ 0 is likely to bethe global one that we want to identify at data analysis.
In order to support this from the viewpoint of the totalnumbers of local peaks and valleys around p� 0, wedefine the integrals (with the integration range selectedsomewhat arbitrarily) as
Upk�Z 3
�3�pkðpÞdp; Uvl�
Z 3
�3�vlðpÞdp: (109)
The results are shown in Fig. 7. We haveUpk < 1 at �t < 3,
but Upk > 1 at �t > 3. The result Upk > 1 suggests that, in
principle, the spurious peaks due to the noise appear in therange �3< p< 3. But the expected number of the peaksin the range becomes nearly unity jUpk � 1j � 10�5 at
�t > 8. The asymptotic slope is steeper than the weakbound Oð��2
t Þ given in Eq. (65).As commented earlier, the values MIpk at the local
peaks themselves are the primary indicator at actual dataanalysis. The peak with the maximum value MIpk should
be selected among multiple local peaks. The peaks existingaround the true value p ¼ 0 would have relatively largevalues due to the underling correlation D0ðpÞ before thenoise N0ðpÞ is added. We thus examine the distribution ofthe height MIpk of the local peaks identified at a given
spectral index p. In Fig. 8 we plot examples of the profilespkðMIpk; pÞ [see Eq. (52)] for �t ¼ 4 at the specific
spectral indexes p ¼ �3, 0 and 6. Even if two local peaksare simultaneously identified, e.g., at p� 0 and p� 6, thedesired one p� 0 would be appropriately selected on theground of the magnitude MIpk, as far as �t * 3 so that
peaks for true and spurious values of p are likely to bedistinguished [see Eq. (47)].
6 4 2 0 2 4 610 7
10 5
0.001
0.1
p
pk
8
02
6 4 2 0 2 4 610 7
10 5
0.001
0.1
p
vl
8
0
2
FIG. 6 (color online). Density distribution of the local peaks �pkðpÞ and valleys �vlðpÞ for the true spectral index pt ¼ 0. We plotfive curves for the intrinsic signal strengths �t ¼ 0, 1, 2, 4 and 8.
0 2 4 6 8
10 5
0.001
0.1
t
Upk
1,
Uvl
Upk 1Upk 1
FIG. 7 (color online). Profiles of the integrals Upk (squares)and Uvl (circles). We have Upk < 1 at �t & 3., and Upk > 1 at
�t * 3.
2 0 2 4 6 810 6
10 5
10 4
0.001
0.01
0.1
1
Ipk
s pk
0
63
FIG. 8 (color online). Distribution spkðMIpk; pÞ of the peaksheight MIpk identified at the spectral indexes p ¼ �3, 0, and 6.
The intrinsic signal strength is �t ¼ 4. We have the identityR1�1 dMIpkspkðMi; pÞ ¼ �pkðpÞ for the area of each curve.
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-13

In the left panels of Fig. 9, we show the two-dimensionalcontour plots for the function spkðMIpk; pÞ [identical to�pkð� ¼ MIpk; pÞ and discussed later]. We can observe
high density region around ðMIpk; pÞ ¼ ð�t; ptÞ, and an
additional increment around MIpk � 0 and p * 6. The
latter is due to the local peaks mainly caused by the noise.For �t ¼ 8, these two are well separated and the latterwould not survive at the data analysis where we checkthe magnitude MIpk.
In order to show this explicitly, in Fig. 10, we plot thelocal peak density �pkð>MIpk; pÞ above given threshold
MIpk [see Eq. (54) for its definition]. With the identity
�pkð>�1; pÞ ¼ �pkðpÞ, the uppermost curve is the same
as the unconstrained one �pkðpÞ given in Fig. 6 for �t ¼ 8.
The abundance of the local peaks around the true valuep ¼ 0 is nearly the same for the four curves. But the localpeaks at p * 6 have the typical value MIpk � 0 and most
of them are removed for the suitable threshold MIpk ¼ 4.
0.0001
0.0001
0.0001
0.0001
0.010.010.1
6 4 2 0 2 4 6 8
1
0
1
2
3
4
p
Ipk,
t 2
0.00010.01 0.1
6 4 2 0 2 4 6 8
1
0
1
2
3
4
p
t 2
0.0001
0.0001
0.01
0.016 4 2 0 2 4 6 8
1
0
1
2
3
4
p
t 2
0.00010.0001
0.0001
0.01
0.01
0.1
6 4 2 0 2 4 6 8
2
0
2
4
6
8
p
Ipk,
t 40.0001
0.01
0.1
6 4 2 0 2 4 6 8
2
0
2
4
6
8
p
t 4
0.0001
0.0001
0.01
0.01
6 4 2 0 2 4 6 8
2
0
2
4
6
8
p
t 4
0.0001
0.0001
0.01
0.01
0.10.5
6 4 2 0 2 4 6 8
5
0
5
10
15
p
Ipk,
t 8
0.0001
0.01
0.10.5
6 4 2 0 2 4 6 8
5
0
5
10
15
p
t 8
0.00010.0001
0.01
0.1
6 4 2 0 2 4 6 8
5
0
5
10
15
p
t 8
FIG. 9 (color online). The two dimensional density distribution �pkð�; pÞ ¼ �pkðMIpk ¼ �; pÞ of local peaks (left), the Fishermatrix prediction �pkðpÞ (middle) and the density of saddle points �vlð�; pÞ (right). The true spectral index is p ¼ pt ¼ 0 and the
intrinsic signal strength is at �t ¼ 2 (top row), 4 (middle row), and 8 (bottom row). We show the isodensity contours for �pk ¼ 0:5, 0.1,
0.01, and 0.0001.
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-14

In Fig. 9, the densities �pkðMIpk; pÞ take their maxi-
mum values at the points with MIpk > �t. This can be
directly confirmed by putting p ¼ 0 in Eq. (47) withD0 ¼ 1 and D1 ¼ 0, and using the monotonic shape ofthe function Fpk. This overestimation is closely related to
the bias [see Eq. (68)] of the amplitude parameter � dis-cussed in the next subsection.
D. Fisher matrix predictions
Here we compare our local peak density �pkðpÞ with theFisher matrix prediction �fisherðpÞ defined in Eq. (60). Theexamples are shown in Fig. 11. At �t * 4, the Gaussian-like profiles around the true value p ¼ 0 are similar for thetwo curves, and this indicates that the simple Fisher matrixprediction becomes a reasonable approximation in thisregime.
In Fig. 12, we show the difference �pk � �fisher between
two expressions. Since the local peak density �pk works as
an upper limit for the probability distribution function ofthe global peaks, the Fisher matrix predictions overesti-mates the probability distribution function at the spectralindexes p with �pk � �fisher < 0.
In Fig. 13, we plot the function �pk � �fisher now
using the rescaled parameter x � ð�t�pÞ introduced inSec. III B. As expected from the analytical evaluation,the difference �pk � �fisher approaches the leading order
correction ðxÞ which is an odd function and characterizedby two parameters C11t ¼ 0:168 and C21t ¼ 0:007154 inthe present case.Nextwe calculate themean and variance of the local peak
distribution. To this end, we take the parameter range p 2½�3; 3� and renormalize the peak density as �pk=Upk to
regard it as a probability distribution function [see Eq. (109)for Upk]. We then evaluate the integrals
h�pi ¼ 1
Upk
Z 3
�3�pkð�pÞd�p;
hð�pÞ2i ¼ 1
Upk
Z 3
�3�pkð�pÞ2d�p:
(110)
The results at various �t are shown in Fig. 14, alongwith the leading order contributions ( / ��2
t ) given in theleft-hand sides of Eqs. (66) and (67). Note that the meanvalue h�pi changes its sign around �t � 4 (from þ to �).The analytical curves show good agreements withthe numerical ones at �t * 5. Similarly, we evaluate theintegral
h��i ¼ 1
Upk
Z 3
�3�pk½ ��pk � �t�d�p (111)
3 2 1 0 1 2 3
0.50
0.20
0.10
0.05
0.02
p
pk,
fish
er
t 2
3 2 1 0 1 2 310 5
10 4
0.001
0.01
0.1
1
p
pk,
fish
er
t 4
3 2 1 0 1 2 310 5
10 4
0.001
0.01
0.1
1
p
pk,
fish
er
t 8
FIG. 11 (color online). Comparison of the local peak density �pkðpÞ (solid curves) with the Fisher matrix prediction (dashed curves).
6 4 2 0 2 4 6
10 8
10 6
10 4
0.01
1
p
pkI,
p
6
FIG. 10 (color online). The densities of the local peaks�pkð>MIpk; pÞ above given thresholds MIpk ¼ �1, 2, 4 and
6. We put �t ¼ 8.
3 2 1 0 1 2 30.04
0.02
0.00
0.02
0.04
p
pkfi
sher
t 2
84
FIG. 12 (color online). Difference between the local peakdensity �pkðpÞ and the Fisher matrix prediction �fisherðpÞ for
the intrinsic signal strengths at �t ¼ 2, 4, and 8.
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-15

for the mean bias for the amplitude parameter �. In Fig. 15,we plot the results with the asymptotic expression 1=ð2�tÞgiven in Eq. (68). These two also show a good agreement.
With the identity �pkð�; pÞ ¼ spkðMIpk ¼ �; pÞ men-
tioned at the end of Sec. III A, the left panels in Fig. 9 canbe used to discuss the local peak distribution �pkð�; pÞ inthe two dimensional parameter space ð�; pÞ. The overallbehaviors of these figures were already described, and wedo not repeat them again. But, in the middle column ofFig. 9, we provide the Fisher matrix predictions. As for theone-dimensional case shown in Fig. 11, the Fisher matrixpredictions become good approximations for larger �t. Inthe right panels of Fig. 9, we also show the density ofsaddle points �vlð�; pÞ. We can observe increments of thedensity �vlð�; pÞ around the regions where the local peakdensity is enhanced by the noises (especially for �t ¼ 8).Since the intrinsic correlation D0ðpÞ is weak here, the
preference of the sign @2pfk̂; �g is decreased and the peak
and valley densities show similar patterns. In contrast, thesaddle points are strongly suppressed around the true valueð�t; ptÞ, as mentioned earlier.
VI. SUMMARY
In this paper, we discussed a simplified model of dataanalysis where we estimate a single intrinsic parameter pand the overall amplitude � of a signal that is contaminatedby Gaussian noises. The approach behind our study wasrecently proposed by Vallisneri [13], and based on the factthat the local stationary points on the likelihood surfacescan be studied with a small number of independent noisecomponents.In this paper, we paid special attention to the local
geometric aspects of the likelihood surfaces, includingvalleys and saddle points. With our analytic expressionsderived owing to the simplified settings, we can see howthe geometrical structure depends on the signal strength,the likelihood value, and correlation between the true andthe trial templates. We expect that our qualitative resultswould provide us useful insights when dealing with morecomplicated problems of data analysis for GW astronomy(and beyond).In the latter half of this paper, we applied our formal
expressions to correlation analysis of stochastic GW back-grounds. Considering ubiquitously realized scaling behav-iors of cosmological processes (and also astrophysical onesrelated to GWs), it would be reasonable to assume a power-law spectrum for the background in the frequency regimeof a GW detector and discuss accuracy of parameter esti-mation for the spectral index and the amplitude of thespectrum. Therefore, the correlation analysis for the back-ground can be regarded as an exemplary as well as realisticcase for applying our formal expressions. At the same time,this concrete example would conversely help us to see thequalitative trends of the formal results.To link the correlation analysis with the formal results,
we provided useful expressions, including ready-to-usefitting formulas for the two LIGO detectors. Then, wenumerically evaluated the expected densities of the localpeaks, valleys, and saddle points of the likelihood surfaces.We find that the abundance of the local valleys is strongly
10 20 30 40
0.001
0.01
0.1
1
t
p,
p2
mean
variance
FIG. 14 (color online). Absolute values for the variance andmean of the local peak density [see Eq. (110)]. The solid curvesare the leading order terms / ��2
t [Eqs. (66) and (67)]. The meanvalue changes its sign from þ to � around �t ¼ 4.
0 10 20 30 40
0.50
0.20
0.10
0.05
0.02
t
FIG. 15 (color online). The positive bias h�i for the amplitudeparameter � estimated by the maximum likelihood analysis. Thecircles are obtained with Eq. (111) and the solid curve is theirasymptotic form 1=2�t [see Eq. (68)].
15 10 5 0 5 10 150.010
0.005
0.000
0.005
0.010
x t p
pkfi
sher
t 16, 64,
FIG. 13 (color online). Difference �pkðpÞ � �fisherðpÞ shownwith the rescaled variable x � �t�p. The dashed curve is for�t ¼ 16 and the thin solid one for �t ¼ 32. The thick solid one isthe asymptotic limit ðxÞ given in Eq. (64).
NAOKI SETO AND KOUTAROU KYUTOKU PHYSICAL REVIEW D 86, 042002 (2012)
042002-16

suppressed around the true parameters, indicating prohib-ition of multiple peaks there. In contrast, peaks and valleysmainly caused by the fluctuations of the noise appear at theregion where the true signal loses correlation. These falsepeaks would typically have low likelihood significance dueto the lack of the underlying signal correlation. Therefore,they will be safely ruled out in the actual data analysis bysetting an appropriate threshold on the value of the like-lihood. At �t * 5, the expansion around the Fisher matrixprediction to the first order in �t is found to approximatethe exact results to a good accuracy. We also analyzed
the biases for parameters estimated with the maximumlikelihood method. At �t * 5, our results show good agree-ments with those obtained in a perturbative method assecond order corrections Oð��2
t Þ relative to the trueparameters.
ACKNOWLEDGMENTS
This work was supported by JSPS and MEXTunder Grant Nos. 20740151, 21684014, 24103006, and24540269.
[1] G.M. Harry (LIGO Scientific Collaboration), ClassicalQuantum Gravity 27, 084006 (2010).
[2] T. Accadia et al., Classical Quantum Gravity 28, 114002(2011).
[3] K. Kuroda (LCGT Collaboration), Int. J. Mod. Phys. D 20,1755 (2011).
[4] P. L. Bender et al., LISA Pre-Phase A Report, 1998(unpublished).
[5] P. Amaro-Seoane et al., arXiv:1201.3621.[6] R. N. Manchester, AIP Conf. Proc. 1357, 65 (2011).[7] G. Hobbs et al., Classical Quantum Gravity 27, 084013
(2010).[8] K. S. Thorne, in 300 Years of Gravitation, edited by S.W.
Hawking and W. Israel (Cambridge University Press,Cambridge, England, 1987), p. 330.
[9] L. S. Finn, Phys. Rev. D 46, 5236 (1992).[10] C. Cutler and E. E. Flanagan, Phys. Rev. D 49, 2658
(1994).[11] P. Jaranowski and A. Krolak, Living Rev. Relativity 8, 3
(2005).[12] M. Vallisneri, Phys. Rev. D 77, 042001 (2008).[13] M. Vallisneri, Phys. Rev. Lett. 107, 191104 (2011).[14] M. Maggiore, Phys. Rep. 331, 283 (2000).[15] E. S. Phinney, arXiv:astro-ph/0108028.[16] S. Kuroyanagi, T. Chiba, and N. Sugiyama, Phys. Rev. D
79, 103501 (2009).[17] K. Nakayama, S. Saito, Y. Suwa, and J. Yokoyama, Phys.
Rev. D 77, 124001 (2008).[18] L. Alabidi, K. Kohri, M. Sasaki, and Y. Sendouda,
arXiv:1203.4663.[19] E. E. Flanagan, Phys. Rev. D 48, 2389 (1993).[20] B. Allen and J. D. Romano, Phys. Rev. D 59, 102001
(1999).[21] The distance should be defined by
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�MIIð�; p;�Þp
.[22] Actually, the global maximum of the function MII is at
the parameter p with maximum jMIðp;�Þj. But ourconcrete model for GW backgrounds analyzed in thispaper has a physical requirement � � 0 (as already as-sumed). Therefore, we mostly analyze the simple formMIðp;�Þ instead of jMIðp;�Þj. But we briefly revisit thisissue in Sec. III.
[23] The simple expressions in this paper are given for dataanalysis with a single intrinsic parameter p. If there are
totally Np intrinsic parameters p1, p2; . . . ; pNp, the local
peaks of the function fk̂; �g are the stationary points@pi
fk̂; �g ¼ 0 where all the eigenvalues of the Np � Np
Hesse matrix @pi@pj
fk̂; �g are negative.[24] R. J. Adler, The Geometry of Random Fields (Wiley,
Chichester, 1981).[25] J.M. Bardeen, J. R. Bond, N. Kaiser, and A. S. Szalay,
Astrophys. J. 304, 15 (1986).[26] We can use the functional freedom of the parameter p to
simplify the covariance matrix for the noises. More spe-cifically, we introduce the new parameter q with therelation dq=dp ¼ ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
C11ðqÞp
. Then we have C000 ¼C0
11 ¼ 1and C0
01 ¼ C021 ¼ 0. Here the quantities with the prime 0
are given for the new parameter q. The only nontrivial oneC022 is written with the original ones Cij (for the parameter
p) by C022 ¼ ðC22C11 � C2
21Þ=C311. We can easily deal with
the probability distribution function of the related noisematrix due to the simple structure of the correlation C0
ij
without using the additional vector Noth. Once we derivethe density �0
pkðqÞ for the new variable q. The densityfor the original parameter p is given by �pkðpÞ ¼�0
pkðqÞdq=dp.[27] S. Vitale and M. Zanolin, Phys. Rev. D 82, 124065 (2010).[28] N. Seto, Phys. Rev. D 73, 063001 (2006).[29] V. Corbin and N. J. Cornish, Classical Quantum Gravity
23, 2435 (2006).[30] G.M. Harry, P. Fritschel, D.A. Shaddock, W. Folkner, and
E. S. Phinney, Classical Quantum Gravity 23, 4887(2006); 23, 7361(E) (2006).
[31] N. Seto, S. Kawamura, and T. Nakamura, Phys. Rev. Lett.87, 221103 (2001).
[32] S. Kawamura et al., Classical Quantum Gravity 23, S125(2006).
[33] T.A. Prince, M. Tinto, S. L. Larson, and J.W. Armstrong,Phys. Rev. D 66, 122002 (2002).
[34] A. Krolak, M. Tinto, and M. Vallisneri, Phys. Rev. D 70,022003 (2004); 76, 069901(E) (2007).
[35] While we have the physical requirement � � 0, we do notimpose the corresponding (and also other) priors �bf � 0for simplicity.
[36] N. Seto and A. Taruya, Phys. Rev. D 77, 103001 (2008).[37] A. Nishizawa, A. Taruya, K. Hayama, S. Kawamura, and
M.-a. Sakagami, Phys. Rev. D 79, 082002 (2009).
GEOMETRICAL ASPECTS OF PARAMETER ESTIMATION . . . PHYSICAL REVIEW D 86, 042002 (2012)
042002-17