Embed Size (px)
Citation preview

1

2
Homeworks
• Problem set 1 returned today. Mean: 85. Std dev: 15• Problem set 1 solutions posted (with password
protection) by Tuesday• Note revisions to problem set 2 matlab assignment
– To clarify the problems and make them work out cleaner for you.
– Modifying an existing solution to the revised version will be very simple.

3
Shape from shading

4
A shape-from-shading algorithm( ) ( ) ( ) ( )( )2
,1,2
,,12
,1,2
,,1, 41
jijijijijijijijiji qqqqpppps −+−+−+−= ++++
local surface smoothness( )( )2, ijijsijij qpREr −= local fidelity to image data
( )∑∑ +=i j
ijij rse λ global function to minimize
( ) ( )( )
( ) ( )( )qRqpREqq
qe
pRqpREpp
pe
sklklsklklkl
kl
sklklsklklkl
kl
∂∂
−−−=∂∂
∂∂
−−−=∂∂
,22
,22
λ
λ
derivative w.r.t. surface parameters
( )( )
( )( )qRqpREqq
pRqpREpp
sklklsklklkl
sklklsklklkl
∂∂
−+=
∂∂
−+=
,
,
λ
λ
set derivatives equal to zero.
Iterative algorithm
( )( )
( )( )qRqpREqq
pRqpREpp
snkl
nklskl
nkl
nkl
snkl
nklskl
nkl
nkl
∂∂
−+=
∂∂
−+=
+
+
,
,
1
1
λ
λ

5
• Show fig. 11-10, 11-11.
Horn, 1986
Results using this approach

6
2-d animation
Copyrighted … yada yada yada

7
3-d animation

8
Image filtering
• Reading: – Chapter 7, F&P
• Recommended Reading: – Chapter 7, 8 Horn
Oct. 3, 2002MIT 6.801/6.866Profs. Freeman and Darrell

9
Take 6.341, discrete-time signal processing
• If you want to process pixels, you need to understand signal processing well, so – Take 6.341
• Fantastic set of teachers:– Al Oppenheim – Greg Wornell– Jae Lim
• Web page: http://web.mit.edu/6.341/www/

10
What is image filtering?
• Modify the pixels in an image based on some function of a local neighborhood of the pixels.
5 141 71
5 310
Local image data
7
Modified image data
Some function

11
Linear functions• Simplest: linear filtering.
– Replace each pixel by a linear combination of its neighbors.
• The prescription for the linear combination is called the “convolution kernel”.
5 141 71
5 310
0.50.5 0010
0 00
Local image data kernel
7
Modified image data

12
Convolution
∑ −−=⊗=lk
lkglnkmIgInmf,
],[],[],[

13
Linear filtering (warm-up slide)
?0
Pixel offset
coef
ficie
nt1.0
original

14
Linear filtering (warm-up slide)
0Pixel offset
coef
ficie
nt1.0
original Filtered(no change)

15
Linear filtering
0Pixel offset
coef
ficie
nt
1.0
?original

16
shift
0Pixel offset
coef
ficie
nt
1.0
original shifted

17
Linear filtering
0Pixel offset
coef
ficie
nt0.3 ?
original

18
Blurring
0Pixel offset
coef
ficie
nt0.3
original Blurred (filterapplied in both dimensions).

19
Blur examples2.4
0Pixel offset
coef
ficie
nt
0.3
original
8
impulse
filtered

20
Blur examples2.4
0Pixel offset
coef
ficie
nt
0.3impulse
original
8
filtered
8
0Pixel offset
coef
ficie
nt
0.3
8
original filtered
4edge 4

21
Linear filtering (warm-up slide)
2.0
original
1.0
?0 0

22
Linear filtering (no change)
2.0
original
1.0
0 0
Filtered(no change)

23
Linear filtering
2.0
original
?0
0.33
0

24
(remember blurring)
0Pixel offset
coef
ficie
nt0.3
original Blurred (filterapplied in both dimensions).

25
Sharpening
2.0
original
0
0.33
0
Sharpened original

26
Sharpening example
coef
ficie
nt
-0.3
1.7
original
811.2
8
-0.25Sharpened
(differences areaccentuated; constant
areas are left untouched).

27
Sharpening
before after

28
Oriented filters

29
Gabor filters at differentscales and spatial frequencies
top row shows anti-symmetric (or odd) filters, bottom row thesymmetric (or even) filters.

30
Linear image transformations
• In analyzing images, it’s often useful to make a change of basis.
Fourier transform, orWavelet transform, or
Steerable pyramid transform
fUFrr
=transformed image
Vectorized image

31
Self-inverting transforms
FU
FUfr
r
+
−
=
=
1r
Same basis functions are used for the inverse transform
U transpose and complex conjugate

32
An example of such a transform: the Fourier transform
discrete domain
∑∑−
=
−
=
+−
=1
0
1
0
ln
],[],[M
k
N
l
NMkmi
elkfnmFπ
Forward transform
∑∑−
=
−
=
++
=1
0
1
0
ln
],[1],[M
k
N
l
NMkmi
enmFMN
lkfπ
Inverse transform

33
To get some sense of what basis elements look like, we plot a basis element --- or rather, its real part ---as a function of x,y for some fixed u, v. We get a function that is constant when (ux+vy) is constant. The magnitude of the vector (u, v) gives a frequency, and its direction gives an orientation. The function is a sinusoid with this frequency along the direction, and constant perpendicular to the direction.

34
Here u and v are larger than in the previous slide.

35
And larger still...

36
Phase and Magnitude• Fourier transform of a real
function is complex– difficult to plot, visualize– instead, we can think of the
phase and magnitude of the transform
• Phase is the phase of the complex transform
• Magnitude is the magnitude of the complex transform
• Curious fact– all natural images have
about the same magnitude transform
– hence, phase seems to matter, but magnitude largely doesn’t
• Demonstration– Take two pictures, swap the
phase transforms, compute the inverse - what does the result look like?

37

38
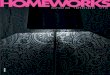
This is the magnitude transform of the cheetah pic

39
This is the phase transform of the cheetah pic

40

41
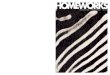
This is the magnitude transform of the zebrapic

42
This is the phase transform of the zebrapic

43
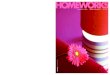
Reconstruction with zebra phase, cheetah magnitude

44
Reconstruction with cheetah phase, zebra magnitude

45
Example image synthesis with fourier basis.
• 16 images

46
2

47
6

48
18

49
50

50
82

51
136

52
282

53
538

54
1088

55
2094

56
4052.4052

57
8056.

58
15366

59
28743

60
49190.

61
65536.

62
Fourier transform magnitude

63
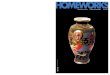
Masking out the fundamental and harmonics from periodic pillars

64
Name as many functions as you can that retain that same
functional form in the transform domain

65Forsyth&Ponce

66
Discrete-time, continuous frequency Fourier transform
Oppenheim, Schafer and Buck,Discrete-time signal processing,Prentice Hall, 1999

67
Discrete-time, continuous frequency Fourier transform pairs
Oppenheim, Schafer and Buck,Discrete-time signal processing,Prentice Hall, 1999

68
Bracewell’s pictorial dictionary of Fourier transform pairs
Bracewell, The Fourier Transform and its Applications, McGraw Hill 1978

69
Why is the Fourier domain particularly useful?
• It tells us the effect of linear convolutions.

70
Fourier transform of convolution
Consider a (circular) convolution of g and h
hgf ⊗=

71
hgf ⊗=Fourier transform of convolution
Take DFT of both sides
( )hgDFTnmF ⊗=],[

72
hgf ⊗=( )hgDFTnmF ⊗=],[
Fourier transform of convolution
Write the DFT and convolution explicitly
[ ] ∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,
],[],[,M
u
N
v
Nvn
Mumi
lk
elkhlvkugnmFπ

73
hgf ⊗=( )hgDFTnmF ⊗=],[
Fourier transform of convolution
[ ] ∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,],[],[,
M
u
N
v
Nvn
Mumi
lkelkhlvkugnmF
π
Move the exponent in
∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,
],[],[M
u
N
v lk
Nvn
Mumi
lkhelvkugπ

74
hgf ⊗=( )hgDFTnmF ⊗=],[
Fourier transform of convolution
[ ] ∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,],[],[,
M
u
N
v
Nvn
Mumi
lkelkhlvkugnmF
π
∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,],[],[
M
u
N
v lk
Nvn
Mumi
lkhelvkugπ
Change variables in the sum( ) ( )
∑ ∑ ∑−−
−=
−−
−=
+
++
−=
1 1
,
],[],[kM
k
lN
l lk
Nnl
Mmki
lkhegµ υ
υµπυµ

75
hgf ⊗=( )hgDFTnmF ⊗=],[
Fourier transform of convolution
[ ] ∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,],[],[,
M
u
N
v
Nvn
Mumi
lkelkhlvkugnmF
π
∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,],[],[
M
u
N
v lk
Nvn
Mumi
lkhelvkugπ
( ) ( )
∑ ∑ ∑−−
−=
−−
−=
+
++
−=
1 1
,],[],[
kM
k
lN
l lk
Nnl
Mmki
lkhegµ υ
υµπυµ
Perform the DFT (circular boundary conditions)
[ ]∑
+−
=lk
NMkmi
lkhenmG,
ln
],[,π

76
hgf ⊗=( )hgDFTnmF ⊗=],[
Fourier transform of convolution
[ ] ∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,],[],[,
M
u
N
v
Nvn
Mumi
lkelkhlvkugnmF
π
∑∑∑−
=
−
=
+−
−−=1
0
1
0 ,],[],[
M
u
N
v lk
Nvn
Mumi
lkhelvkugπ
( ) ( )
∑ ∑ ∑−−
−=
−−
−=
+
++
−=
1 1
,],[],[
kM
k
lN
l lk
Nnl
Mmki
lkhegµ υ
υµπυµ
[ ]∑
+−
=lk
NMkmi
lkhenmG,
ln
],[,π
Perform the other DFT (circular boundary conditions)
[ ] [ ]nmHnmG ,,=

77
Analysis of our simple filters

78
Analysis of our simple filters
0Pixel offsetco
effic
ient
1.0
original Filtered(no change)
1
],[],[1
0
1
0
ln
=
= ∑∑−
=
−
=
+−M
k
N
l
NMkmi
elkfnmFπ
0
1.0 constant

79
Analysis of our simple filters
0Pixel offsetco
effic
ient
original
1.0
shifted
Mmi
M
k
N
l
NMkmi
e
elkfnmF
δπ
πδ
−
−
=
−
=
+−
=
−= ∑∑
],[],[1
0
1
0
ln
0
1.0
Constant magnitude, linearly shifted phase

80
Analysis of our simple filters
0Pixel offsetco
effic
ient
original
0.3
blurred
+=
= ∑∑−
=
−
=
+−
Mm
elkfnmFM
k
N
l
NMkmi
π
π
cos2131
],[],[1
0
1
0
ln
Low-pass filter
0
1.0

81
Analysis of our simple filters2.0
original0
0.33
0sharpened
+−=
= ∑∑−
=
−
=
+−
Mm
elkfnmFM
k
N
l
NMkmi
π
π
cos21312
],[],[1
0
1
0
ln
high-pass filter
0
1.0
2.3

82
Sampling and aliasing

83
Sampling in 1D takes a continuous function and replaces it with a vector of values, consisting of the function’s values at a set of sample points. We’ll assume that these sample points are on a regular grid, and can place one at each integer for convenience.

84
Sampling in 2D does the same thing, only in 2D. We’ll assume that these sample points are on a regular grid, and can place one at each integer point for convenience.

85
A continuous model for a sampled function
• We want to be able to approximate integrals sensibly
• Leads to– the delta function– model on right
Sample2D f (x,y)( )= f (x, y)δ (x − i, y − j)i=−∞
∞
∑i=−∞
∞
∑
= f (x,y) δ (x − i, y − j)i=−∞
∞
∑i=−∞
∞
∑

86
The Fourier transform of a sampled signal
F Sample2D f (x,y)( )( )= F f (x, y) δ(x − i,y − j)i=−∞
∞
∑i=−∞
∞
∑
= F f (x,y)( )**F δ(x − i, y − j)i=−∞
∞
∑i=−∞
∞
∑
= F u − i,v − j( )j=−∞
∞
∑i=−∞
∞
∑

87

88

89
Aliasing
• Can’t shrink an image by taking every second pixel
• If we do, characteristic errors appear – In the next few slides– Typically, small phenomena look bigger; fast
phenomena can look slower– Common phenomenon
• Wagon wheels rolling the wrong way in movies• Checkerboards misrepresented in ray tracing• Striped shirts look funny on colour television

90
Resample the checkerboard by taking one sample at each circle. In the case of the top left board, new representation is reasonable. Top right also yields a reasonable representation. Bottom left is all black (dubious) and bottom right has checks that are too big.

91
Constructing a pyramid by taking every second pixel leads to layers that badly misrepresent the top layer

92
Smoothing as low-pass filtering
• A filter whose FT is a box is bad, because the filter kernel has infinite support
• Common solution: use a Gaussian– multiplying FT by
Gaussian is equivalent to convolving image with Gaussian.
• The message of the FT is that high frequencies lead to trouble with sampling.
• Solution: suppress high frequencies before sampling– multiply the FT of the
signal with something that suppresses high frequencies
– or convolve with a low-pass filter

93
Sampling without smoothing. Top row shows the images,sampled at every second pixel to get the next; bottom row shows the magnitude spectrum of these images.

94
Sampling with smoothing. Top row shows the images. Weget the next image by smoothing the image with a Gaussian with sigma 1 pixel,then sampling at every second pixel to get the next; bottom row shows the magnitude spectrum of these images.

95
Sampling with smoothing. Top row shows the images. Weget the next image by smoothing the image with a Gaussian with sigma 1.4 pixels,then sampling at every second pixel to get the next; bottom row shows the magnitude spectrum of these images.

96
Thought problemAnalyze
crossed gratings

97
What is a good representation for image analysis?
• Fourier transform domain tells you “what” (textural properties), but not “where”.
• Pixel domain representation tells you “where” (pixel location), but not “what”.
• Want an image representation that gives you a local description of image events—what is happening where.

98
Image pyramids

99
The Gaussian pyramid
• Smooth with gaussians, because– a gaussian*gaussian=another gaussian
• Synthesis – smooth and sample
• Analysis– take the top image
• Gaussians are low pass filters, so repn is redundant

100

101
The Laplacian Pyramid
• Synthesis– preserve difference between upsampled
Gaussian pyramid level and Gaussian pyramid level
– band pass filter - each level represents spatial frequencies (largely) unrepresented at other levels
• Analysis– reconstruct Gaussian pyramid, take top layer

102

103

104

105
Oriented pyramids
• Laplacian pyramid is orientation independent
• Apply an oriented filter to determine orientations at each layer– by clever filter design, we can simplify
synthesis– this represents image information at a particular
scale and orientation

106
Reprinted from “Shiftable MultiScale Transforms,” by Simoncelli et al., IEEE Transactionson Information Theory, 1992, copyright 1992, IEEE