Embed Size (px)
DESCRIPTION
HPT. Roland Lemke Thomas Jürges (NRAO) Martin Paegert. Introduction. History Program inception 1986 Feasibility studies 1988 fund of 8M DM by the Ministry of Economics, Trade and Technology, NRW 1989 Poltical problems, between AIRUB and industry and reunifcation 1992 - PowerPoint PPT Presentation
Citation preview

8.10.2005 Astronomisches Institut der Ruhr-Universität Bochum
1
HPT
Roland Lemke
Thomas Jürges (NRAO)
Martin Paegert
8.10.2005 2
Introduction History
Program inception 1986 Feasibility studies 1988 fund of 8M DM by the Ministry of
Economics, Trade and Technology, NRW 1989
Poltical problems, between AIRUB and industry and reunifcation 1992
Several attempts meanwhile

8.10.2005 3
History (cont.) Ministry of School, Education,
Science and Research (MSWWF), NRW grants new funds 1997
HPT comes to Bochum 1999 Replacing of the old driving system
2001 Replacing of the old software
system 2002 First pointing tests 2003 Shipment to Chile June 2005

8.10.2005 4
Technical concept direct-motor driven roller
screw, accuracy 10 nm weight of a single leg is
about 200 kg Optical configuration
1.5m primary mirror Focal ratio f/D = 2.5 Field rotation 45 deg

8.10.2005 5
M1
55mm thin meniscus, weight 120kg, 1.2 t/sqm VLT 10 t/sqm
an actively controlled primary which consists of a thin Zerodur meniscus that is permanently fixed to a CFRP grid structure

8.10.2005 6
M2
a secondary whose support legs are also designed as a Hexapod to compensate for gravitational deformation

8.10.2005 7
Code generation Automatic generation of an
Component from a given IDL, including *.h and *.cpp files Makefile *.body function body *.xsd and *.xml files for CDB QT GUI
talk tomorrow by Martin Paegert
8.10.2005 8
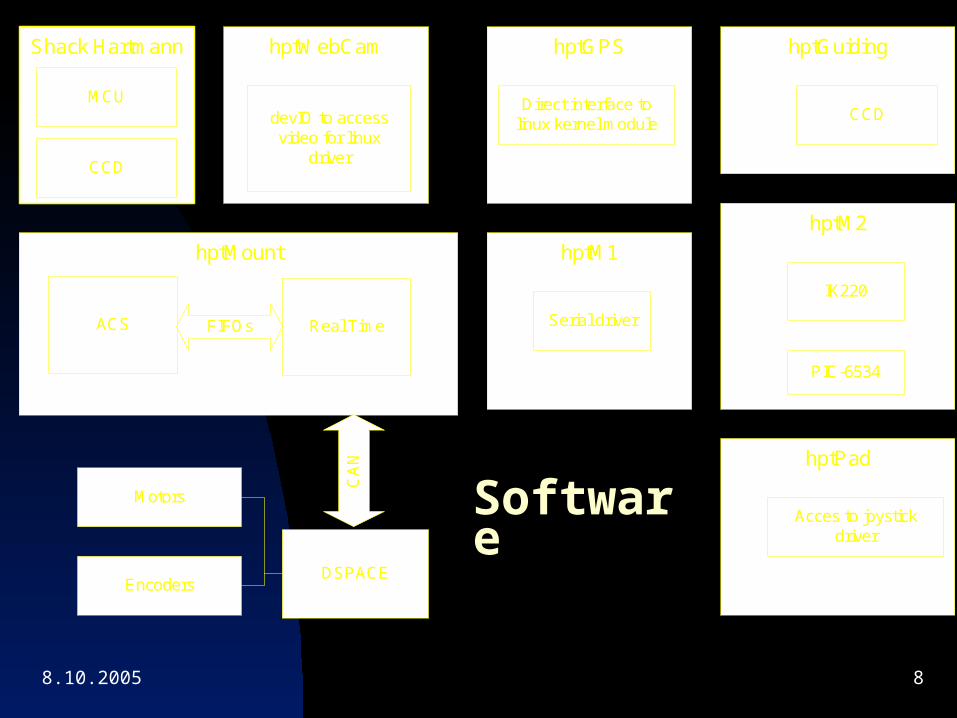
Software
Shack Hartmann
DSPACE
hptMount
ACS Real TimeFIFOs
CA
N
CCD
MCU
Motors
Encoders
hptM1
hptM2
IK220
PIC-6534
hptGuiding
Serial driver
CCD
hptWebCam
devIO to accessvideo for linux
driver
hptGPS
Direct interface tolinux kernel module
hptPad
Acces to joystickdriver

8.10.2005 9
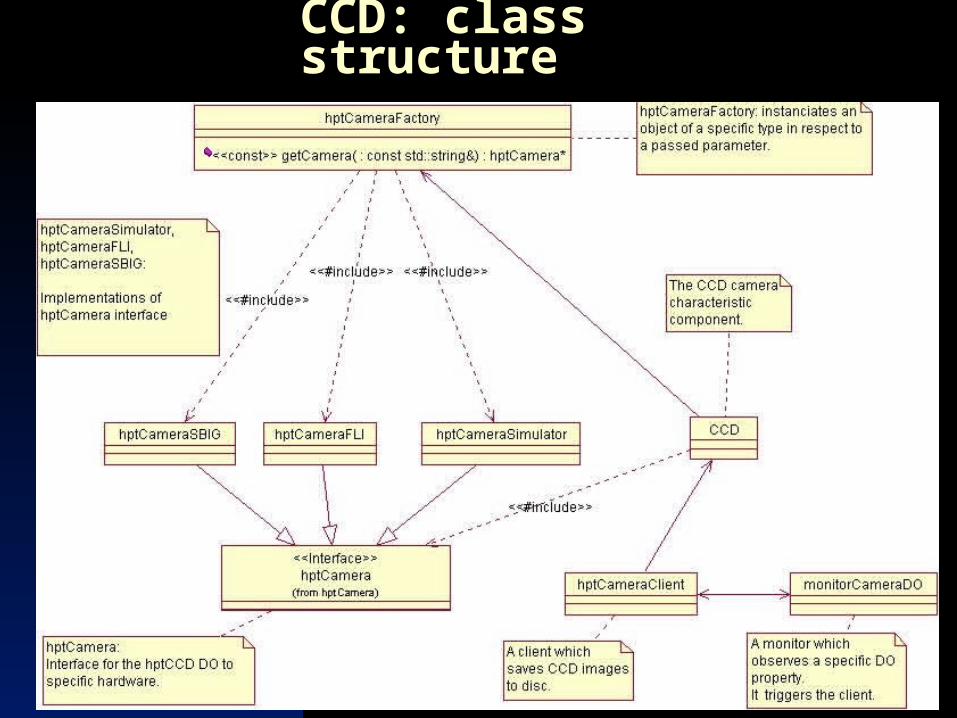
CCD software Different types of camera hardware
but only one ACS module Camera factory class One interface class
Class structure:
8.10.2005 10
CCD: class structure

8.10.2005 11
ACS in CCD´s real life: What is in use now?
Monitoring possibilities Triggering of applications
Data transfer via sequences
(later via Notification Channel or bulk data channel)
1 Module – 3 CCD camera manufacturer (+ 1 simulation) – 4 different configurations

8.10.2005 12
Next steps After infrastructural problems are solved,
assembly of telescope and electronics Commissioning Science verification

8.10.2005 13
The usage of ACS
Easy to integrate peripherials (GPS clocks, Game pads, WebCams, CCDs, Motor control units, DIO and AIO boards)
Easy to develop GUIs with Python and Qt MS-Windows drivers
Directly ported to Linux Using an ACS Version ported to Cygwin

8.10.2005 14
Conclusions ACS does what is required Sharing code among projects Discussions between the groups
using ACS





























