Embed Size (px)
DESCRIPTION
Android
Citation preview

VEHICLE TRACKING AND ACCIDENT WARNING
SYSTEM USING GPS AND ITS IMPLEMENTATION
IN FPGA
A PROJECT REPORT
Submitted by
Reg. No. Student’s Name
30607106033 HUBERT VIJAY A
30607106044 KARTHIKEYAN N
30607106068 PRABHU K
in partial fulfillment for the award of the degree
of
BACHELOR OF ENGINEERING IN
ELECTRONICS AND COMMUNICATION ENGINEERING
JEPPIAAR ENGINEERING COLLEGE, CHENNAI
ANNA UNIVERSITY: CHENNAI-600 025.
APRIL 2011

ANNA UNIVERSITY
CHENNAI-600 025
JEPPIAAR ENGINEERING COLLEGE
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
JEPPIAAR NAGAR, RAJIV GANDHI SALAI, CHENNAI-600 119
BONAFIDE CERIFICATE
Certified that this project report “VEHICLE TRACKING AND
ACCIDENT WARNING SYSTEM USING GPS AND ITS
IMPLEMENTATION IN FPGA” is the bonafide work of
__________________________________________________________________
who carried out the project work under my supervision.
PROJECT GUIDE HEAD OF THE DEPARTMENT
Submitted for the examination held on ____________________
INTERNAL EXAMINER EXTERNAL EXAMINER

CERTIFICATE OF EVALUATION
S. No.
Name of the student/s
who have done the
project
Title of the project
Name of the
Supervisor with
Designation
1
2
3
HUBERT VIJAY A
KARTHIKEYAN N
PRABHU K
VEHICLE
TRACKING AND
ACCIDENT
WARNING SYSTEM
USING GPS AND ITS
IMPLEMENTATION
IN FPGA
MR.B.ARUN
VIJAYA KUMAR,
ASST.PROFESSOR
The Reports of the project work submitted by the above students in partial
fulfillment for the award of Bachelor of Engineering / Technology Degree in
Electronics & Communication Engineering of Anna University, Chennai were
evaluated and confirmed to be reports of the work by the above students and then
evaluated.
INTERNAL EXAMINER EXTERNAL EXAMINER

ACKNOWLEDGEMENT
We are very much indebted to the Chairman, Hon’ble. Dr. JEPPIAAR, M.A.,
B.L., Ph.D., the Secretary Dr. P. Chinnadurai, M.Phil, B.Ed., Ph.D, the Director
Dr. Regeena, B.Tech, M.B.A., Ph. D., the Principal Dr. Sushil Lal Das, M.Sc
(Engg)., Ph.D.
We would also like to express our deep sense of gratitude to the Head of the
Department and also to our guide Mr.B.Arun VijayaKumar, Asst.Professor for
giving valuable suggestions for making this project a grand success.
We take this opportunity to express our sincere gratitude to our external guide
Mr.Vivek, Project Guide, Vi Microsystems Pvt. Ltd, Chennai for giving us the
opportunity to do this project under their esteemed guidance.
I also thank the teaching and non teaching staff members of the department of
Electronics and Communication Engineering for their constant support.

V
ABSTRACT
In highly populated Countries like India, during accidents, people lose their lives due to
unavailability of proper medical facilities at the right time. This project senses any accident in
the vehicle and intimates pre-programmed numbers like the owner of the vehicle, ambulance,
police etc. The GSM technology is used to send the position of the vehicle as a SMS to those
numbers. And also the position of the vehicle can be obtained by the owner of the vehicle or
anyone with proper permission by sending an SMS to a number. Most of the companies wants to
keep track of their vehicles, with this equipment we can keep track of the vehicle by periodically
sending SMS and the position of the vehicle is sent by the GSM modem as a SMS to the user.
To know the position of the vehicle, the owner sends a request through a SMS. This is
received by a GSM modem in the device and processed by the Spartan processor and the
processor sends command to a GPS module in the device. The GPS module responds with co-
ordinates position of the vehicle. This position is sent to the user as a SMS to the user with date,
time, latitude and longitude positions.
When there is an accident, the accelerometer sensor detects the change in position and
sends a signal to the processor. The processor analyses the signal and finds there is an accident.
It immediately sends the position of the vehicle and also the information that there is an accident,
to pre-programmed numbers such as the owner of the vehicle, police, ambulance etc. So the
ambulance arrives in time and the police can arrive in time to clear the traffic. This reduces the
time taken by ambulance to arrive and also traffic can be cleared easily.

VI
TABLE OF CONTENTS
CHAPTER
NO. TITLE
PAGE
NO.
ABSTRACT V
LIST OF TABLES x
LIST OF FIGURES xi
LIST OF ABBREVIATIONS xii
1 INTRODUCTION 1
2 LITERATURE REVIEW 2
2.1 INTRODUCTION 2
2.2 PERSPECTIVE OF HAPSARI , SYAMSUDIN,
PRAMANA
2
2.3 PERSPECTIVE OF ADNAN I. YAQZAN, ISSAM W.
DAMAJ, AND RACHED N. ZANTOUT 3
2.4 CONCLUSION 4
3 SYSTEM ARCHITECTURE AND POWER
SUPPLY 5
3.1 SYSTEM OVERVIEW 5
3.2 BLOCK DIAGRAM OF THE SYSTEM 5
3.3 POWER SUPPLY CIRCUIT 6
3.3.1 Linear Power Supply 7
3.3.2 Multi output Power Supply 8

VII
3.3.3 Regulator 9
4 GLOBAL SYSTEM FOR MOBILE(GSM) 10
4.1GSM OVERVIEW 10
4.2 GSM SPECIFICATIONS 10
4.3 GSM MODEM 11
4.4 AT COMMANDS 12
5 GPS (GLOBAL POSITIONING SYSTEM) 14
5.1 GPS BASICS 14
5.2 GPS PRINCIPLE 14
5.3 GPS RECEIVER 15
5.4 MAJOR COMPONENTS OF A GPS RECEIVER 16
5.5 FUNCTION OF GPS 16
5.6 RECEIVER OUTPUT 17
5.7 GPS DEVICE 18
5.8 RECEIVER FEATURES 19
5.9 HARDWARE CONNECTION 22
5.10 TYPES OF ERRORS 23
6 SPARTAN 3E BOARD 24
6.1 CONCEPT OF FIELD-PROGRAMMABLE GATE 24

VIII
ARRAY (FPGA)
6.2 FEATURES OF SPARTAN 3E BOARD 27
6.3 ARCHITECTURE OF SPARTAN 3E BOARD 28
7 ACCELEROMETER SENSOR 33
7.1 ACCELEROMETER BASICS 33
7.2 ADXL3XX 33
7.3 FEATURES OF ADXL3XX 33
7.4 FUNCTIONAL BLOCK DIAGRAM 34
7.5 THEORY OF OPERATION 35
7.6 APPLICATIONS OF ACCELEROMETER SENSOR 36
7.7 I2C BUS 37
7.7.1 Features of I2C bus 38
7.7.2 General Description of PCF 8591 39
7.7.3 Addressing 39
7.7.4 Control Byte 39
8 DESIGN OF SYSTEM SOFTWARE 40
8.1 XILINX SOFTWARE 40
8.2 XILINX WEB EDITION 40
8.3 VHDL 40
8.4 DESIGN FLOW IN VHDL 41

IX
8.5 CREATING A NEW PROJECT 42
8.6 PROGRAM 43
9 CONCLUSION 83
REFERENCES 84

X
LIST OF TABLES
TABLE
NO. TITLE
PAGE
NO.
5.1 GPS Receiver Characteristics 20
6.1 DIP switch connections with FPGA 28
6.2 LED pin connections with FPGA 30
6.3 LCD pin connections with FPGA 31
7.1 Pin Function Descriptions of ADXL335 35

XI
LIST OF FIGURES
FIGURE
NO. TITLE
PAGE
NO.
3.1 General Block Diagram 5
3.2 Pin connections 6
3.3 Block Diagram of Linear Power Supply 7
3.4 Circuit Diagram of 5V Power Supply 8
3.5 Multi Output Power Supply 8
3.6 Regulator 9
4.1 General Block Diagram of GSM MODEM 13
5.1 GPS Principle 15
5.2 GPS Device 18
6.1 Example of a Logic Cell 25
6.2 Logic Block Pin Locations 26
6.3 Architecture of SPARTAN 3E Board 29
6.4 SPARTAN 3E Board 30
6.5 Pin Configuration of PCF 8951 31
6.6 Port Configuration of Spartan Processor 32
7.1 Functional Block Diagram of ADXL335 34
7.2 Pin Configuration of ADXL335 34
7.3 Pin Configuration of IC 8951 38
7.4 Address Byte in I2C 39
8.1 Design Flow in VHDL 41

XII
LIST OF ABBREVIATIONS
GPS Global positioning system
GSM Global system for mobile Communications
SMS Short message service
FPGA Field programmable gate array
HDL Hardware description language
VHDL VHSIC Hardware description language
AC Alternating current
DC Direct current
IC Integrated circuit
TDMA Time Division multiple access
FDMA Frequency division multiple access
GMSK Gaussian Minimum Shift Keying
LPC Linear predictive coding
USB Universal serial bus
NMEA National Marine Electronics Association
LUT Lookup table
CPLD Complex programmable logic device
VHSIC Very High Speed Integrated Circuit

1
CHAPTER 1
INTRODUCTION
There is a drastic increase in the number of vehicles in these days which also cause a steep
rise in the number of accidents with a lot of people losing their lives. According to the World Health
Organization, an estimated 1.2 million people lose their lives every year due to car accidents.
India's road accident records 16 % of the world's road accident deaths, whereas India has only 1 % of
the world's road vehicles. It is due to the increase in the number of vehicles without a subsequent
increase in the road facilities required for it. In most of the accident cases, the victims lose their lives
because of the unavailability of medical facilities at the right time. In large companies with a large
number of vehicles, the drivers use the company‘s vehicles even for their own purposes and impact a
loss to the company. To solve problems like these, this project came into existence.
This project is mainly used to track the position of the Vehicle by the owner or can also be
used in the public transportation system by the people to know the location of the buses or trains. In
case of any accident, the system sends automated messages to the pre-programmed numbers. We can
send messages to any number of mobiles. The owner of the vehicle, Police to clear the traffic,
Ambulance to save the people can be informed by this device. This uses a GPS (Global Positioning
System) to know the exact position of the vehicle with an accuracy of a few feet. GSM is used to
receive SMS from the user and reply the position of the vehicle through a SMS. A FPGA is used to
control and co-ordinate all the parts used in this system. When there is any accident, an accelerometer
sensor is triggered and it sends signal to the FPGA. The FPGA circuit processes the input and sends
the appropriate output according to the programming done.
This can also be used for other purposes such as asset tracking, Stolen Vehicle recovery,
Fleet management, Field Service Management, Field Sales etc. Industries not traditionally known to
use vehicle tracking systems have started to use it in creative ways to improve their processes or
businesses. The hospitality industry has caught on to this technology to improve customer service.
For example, a luxury hotel in Singapore has been known to install vehicle tracking system in their
limousines to ensure they can welcome their VIPs when they reach the hotel. Vehicle tracking
systems have also been used in food delivery and car rental companies.

2
CHAPTER 2
LITERATURE REVIEW
2.1 Overview:
The papers published in IEEE journals regarding vehicle position tracking system and its
implementation on Fpga has helped to develop this project by analyzing the defects and using the
effective ways from all resources available. The concept of the reference papers and how it helped
in designing this system is described in the following subsections.
2.2 Perspective of Hapsari , Syamsudin, Pramana:
This project is referenced to the paper ―Design of vehicle position tracking system using
short message services and its implementation on fpga‖ done by Arias Tanti Hapsari , Eniman Y
Syamsudin and, Imron Pramana. In this reference paper author used ‗GPS module‘ to receive the
vehicular position and, ‗short messaging service via mobile phone‘ to receive user request and to
send the vehicle‘s position. These components are controlled by a system which is designed using
VHDL on Altera MAX plus I1 software, and it is implemented on FPGA chip Altera UPlX
demoboard (Altera FLEX 10KEPF). In this way the author gets the position of the vehicle and send it
to any user who gives the request for tracking.
The objective of this project is to achieve a design of such system that can give information
of the vehicle position every time there's a request for it. Safety and security is a major concern for
all vehicle owners . This vehicle tracking system ensures safety and security of vehicle by tracking
its position and sending it to owner or any people whenever it is requested by them.
And also GPS system ensures maximum accuracy in finding the vehicular position ranging
within few feets. Using the mobile phone attached in the system ,the position of the vehicle is sent as
―short message service‖(SMS) to the requested people. The designed system is implemented on
Altera UPlX demohoard. There are two testing and verification procedures of this system.

3
2.3 Perspective of Adnan I. Yaqzan, Issam W. Damaj, and Rached N. Zantout :
Another paper referenced is‖ GPS-based Vehicle Tracking System-on-Chip‖. Modern
powerful reconfigurable systems are suited in the implementation of various data-stream, data-
parallel, and other applications . An application that needs real-time,
fast, and reliable data processing is the global positioning system (GPS)-based vehicle tracking
system (VTS). This system is designed using a system-on-chip (SOC) replacement of the current
microcontroller-based implementation.
The proposed SOC is built on a field programmable gate array (FPGA) promising a cheaper
design, a more cohesive architecture, a faster processing time and an enhanced system interaction.
Reconfigurable systems enable extensive exploitation of computing resources. The reconfiguration
of resources in different parallel topologies allows for a good matching with the inherent intrinsic
parallelism of an algorithm or a specific operation.
The introduction of a new paradigm in hardware design called Reconfigurable Computing
(RC) offers to solve any problem by changing the hardware configurations to offer the performance
of dedicated circuits. Reconfigurable computing enables mapping software into hardware with the
ability to reconfigure its connections to reflect thesoftware being run. The ability to completely
reprogram the computer‘s hardware implies that this new architecture provides immense scope for
emulating different computer architectures.
As the complexity of FPGA-based designs grow, a need for a more efficient and flexible
design methodology is required. One of the modern tools is Quartus II. It is a compiler, simulator,
analyzer and synthesizer with a great capability of verification and is chosen to be used for this
implementation.
It consists of two main parts, the Base Station (BS) and the Mobile Unit (MU). The BS
consists of a PIC Microcontroller based hardware connected to the serial port of a computer. The MU
is a self-contained PIC Microcontroller based hardware and a GPS module.

4
The latter would keep track of all the positions traversed by the vehicle and records them in
its memory. The system has a great storage capacity, and could perform a significant recording with a
considerable sampling rate. The mobile unit (MU) of the addressed Aram Locator consists of two
communicating microcontrollers interfaced with memory. There is also a GPS unit and RF
transceiver.
2.4 Conclusion:
With the help of advancement in technology using an FPGA controlled system we can easily
track any object or vehicle which ensures safety for vehicle owners and also lots of uses for public
transport system.

5
CHAPTER 3
DESIGN OF SYSTEM STRUCTURE AND POWER SUPPLY
3.1 System overview:
This project is custom made for the heavily populated countries like India. Accident warning
System is used to save the person‘s life by making the medical facilities arriving in time. The
Vehicular tracking System can be used by the owner of the Vehicle to track the position of the
vehicle and also can be used by the people in public transportation Systems. In public transportation
System, People can know the location of the buses or trains which will ease them. The location of
the vehicle can be known by using a GPS receiver. Once the SMS is received from user, the
response is sent to user via a GSM modem. An accelerometer sensor is used to detect any accident
which will trigger a signal in case of any accidents. A FPGA Spartan processor is used to co-
ordinate all the parts in this system according to the program done.
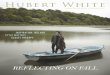
3.2 Block Diagram of the System:
Figure 3.1 General Block Diagram
FPGA
SPARTAN 3E GSM
MODULE
GPS
RECIEVER
ACCLEROMETER
SENSOR
POWER SUPPLY
CIRCUIT
SIGNAL
CONDITIONING
CIRCUIT
Request from
user
Response from the
system

6
Figure 3.2 : Pin connections
3.3 Power Supply Circuit:
In this block, we use transformers to convert domestic ac voltage to 9V ac. Then using diode
rectifiers it is converted into suitable dc supply and given as input to the microprocessor and all other
circuits in the equipment.
Power Supply is the device that transfers electric power from a source to a load using
electronic circuits. Power supplies are used in many industrial and aerospace applications and also in
consumer products. Some of the requirements of power supplies are small size, lightweight, low cost,
and high power conversion efficiency. In addition to these, some power supplies require the
following: electrical isolation between the source and load, low harmonic distortion for the input and
output waveforms, and high power factor (PF) if the source is ac voltage. Some special power
supplies require controlled direction of power flow. Typical application of power supplies is to

7
convert utility's AC input power to a regulated voltage(s) required for electronic equipment.
Depending on the mode of operation of power semiconductors power supply can be linear or
switching.
3.3.1 Linear Power Supply:
A linear power supply is the oldest and simplest type of power supply. In these power
supplies, electrical isolation can only be provided by bulky line frequency transformers. The ac
source can be rectified with a bridge rectifier to get an uncontrolled dc, and then a dc-to-dc converter
can be used to get a controlled dc output. The output voltage is regulated by dropping the extra input
voltage across a series transistor (therefore, also referred to as a series regulator). They have very
small output ripple, theoretically zero noise, large hold-up time (typically 1–2 ms), and fast response.
The action of a transformer is such that a time-varying (AC) voltage or current is transformed to a
higher or lower value, as set by the transformer turns ratio.
Figure3.3 Block Diagram of Linear Power Supply
The transformer does not add power, so it follows that the power (V × I) on either side must
be constant. That is the reason that the winding with more turns has higher voltage but lower current,
while the winding with less turns has lower voltage but higher current. The step down transformer
converts the AC input with the higher level to some lower level. A bridge rectifier converts the AC
voltage into DC voltage. A four-transistor converter (Bridge Rectifier) that can generate the highest
output power than other types of rectifiers. The filter circuit resists the unwanted AC signals. The
regulator down-convert a DC voltage to a lower DC voltage of the same polarity.

8
Figure 3.4 Circuit Diagram for 5V power Supply
3.3.2Multi output Power Supply:
It is also possible to generate multiple voltages using linear power supplies. In multi output
power supply a single voltage must be converted into the required system voltages (for example,
+5V, +12V and -12V) with very high power conversion efficiency.
Figure 3.5 Multi Output power Supply

9
3.3.3 Regulator:
Voltage regulators ICs are available with fixed (typically 5, 12 and 15V) or variable output
voltages. They are also rated by the maximum current they can pass. Negative voltage regulators are
available, mainly for use in dual supplies. Most regulators include some automatic protection from
excessive current ('overload protection') and overheating ('thermal protection').
Figure 3.6 :Regulator

10
CHAPTER 4
GLOBAL SYSTEM FOR MOBILE(GSM)
4.1 GSM overview:
Global System for Mobile Communications (GSM) is the world‘s most
popular standard for mobile telephony systems. The GSM Association estimates that 80% of the
global mobile market uses the standard. GSM is used by over 1.5 billion people across more than 212
countries and territories. This ubiquity means that subscribers can use their phones throughout the
world, enabled by international roaming arrangements between mobile network operators. GSM
differs from its predecessor technologies in that both signalling and speech channels are digital, and
thus GSM is considered a second generation (2G) mobile phone system. This also facilitates the
wide-spread implementation of data communication applications into the system.
The GSM standard has been an advantage to both consumers, who may benefit from the
ability to roam and switch carriers without replacing phones, and also to network operators, who can
choose equipment from many GSM equipment vendors. GSM also pioneered low-cost
implementation of the short message service (SMS), also called text messaging, which has since been
supported on other mobile phone standards as well.
4.2 GSM specifications:
Frequency: 900 MHz or 1800 MHz (Some countries in the Americas including Canada and
the United States use the 850 MHz and 1900 MHz bands, 400 and 450 MHz frequency bands are
assigned in some countries, notably Scandinavia)
Modulation: Modulation is a form of change process where we change the input
information into a suitable format for the transmission medium. We also changed the information by
demodulating the signal at the receiving end.The GSM uses Gaussian Minimum Shift Keying
(GMSK) modulation method.
Access Methods: Because radio spectrum is a limited resource shared by all users, a method
must be devised to divide up the bandwidth among as many users as possible.GSM chose a

11
combination of TDMA/FDMA as its method. The FDMA part involves the division by frequency of
the total 25 MHz bandwidth into 124 carrier frequencies of 200 kHz bandwidth.
One or more carrier frequencies are then assigned to each BS. Each of these carrier
frequencies is then divided in time, using a TDMA scheme, into eight time slots. One time slot is
used for transmission by the mobile and one for reception. They are separated in time so that the
mobile unit does not receive and transmit at the same time.
Transmission Rate: The total symbol rate for GSM at 1 bit per symbol in GMSK produces
270.833 K symbols/second. The gross transmission rate of the time slot is 22.8 Kbps.
Frequency Band: The uplink frequency range specified for GSM is 933 - 960 MHz (basic
900 MHz band only). The downlink frequency band 890 - 915 MHz (basic 900 MHz band only).
Channel Spacing: This indicates separation between adjacent carrier frequencies. In GSM,
this is 200 kHz.
Speech Coding: GSM uses linear predictive coding (LPC). The purpose of LPC is to reduce
the bit rate. The LPC provides parameters for a filter that mimics the vocal tract. The signal passes
through this filter, leaving behind a residual signal. Speech is encoded at 13 kbps.
Duplex Distance: The duplex distance is 80 MHz Duplex distance is the distance between
the uplink and downlink frequencies. A channel has two frequencies, 80 MHz apart.
4.3 GSM Modem:
A GSM modem is a specialized type of modem which accepts a SIM card, and operates
over a subscription to a mobile operator, just like a mobile phone. From the mobile operator
perspective, a GSM modem looks just like a mobile phone. A wireless modem behaves like a dial-up
modem. The main difference between them is that a dial-up modem sends and receives data through
a fixed telephone line while a wireless modem sends and receives data through radio waves.
A GSM modem can be an external device or a PC Card / PCMCIA Card. Typically, an
external GSM modem is connected to a computer through a serial cable or a USB cable. A GSM

12
modem in the form of a PC Card / PCMCIA Card is designed for use with a laptop computer. It
should be inserted into one of the PC Card / PCMCIA Card slots of a laptop computer.
Like a GSM mobile phone, a GSM modem requires a SIM card from a wireless carrier in
order to operate. Both GSM modems and dial-up modems support a common set of standard AT
commands. You can use a GSM modem just like a dial-up modem.
In addition to the standard AT commands, GSM modems support an extended set of AT
commands. These extended AT commands are defined in the GSM standards. With the extended AT
commands, you can do things like:
Reading, writing and deleting SMS messages.
Sending SMS messages.
Monitoring the signal strength.
Monitoring the charging status and charge level of the battery.
Reading, writing and searching phone book entries.
SIM Phonebook management
Fixed Dialling Number (FDN)
Real time clock
The number of SMS messages that can be processed by a GSM modem per minute is very
low -- only about six to ten SMS messages per minute.
4.3.1AT commands:
AT commands are also known as Hayes AT commands. There are different views to
understand the meanings of "AT". Some call it "Attention Telephone", whereas others interpret it as
"Attention Terminal" commands.
AT commands allow giving instructions to both mobile devices and ordinary landline
telephones. The commands are sent to the phone's modem, which can be a GSM modem or PC
modem.. Different manufacturers may have different sets of AT commands. Fortunately, many AT
commands are the same. Mobile device manufacturers may also give attention to operators to allow
or not to allow some commands on phones.

13
Figure 4.1 General Block Diagram of GSM MODEM

14
CHAPTER 5
GPS (GLOBAL POSITIONING SYSTEM)
5.1 GPS Basics:
The Global Positioning System (GPS) is a space-based global navigation satellite
system (GNSS) that provides reliable location and time information in all weather and at all times
and anywhere on or near the Earth when and where there is an unobstructed line of sight to four or
more GPS satellites. It is maintained by the United States government and is freely accessible by
anyone with a GPS receiver. When people talk about "a GPS," they usually mean a GPS receiver.
The Global Positioning System (GPS) is actually a constellation of 27 Earth-orbiting satellites (24
in operation and three extras in case one fails). The U.S. military developed and implemented this
satellite network as a military navigation system, but soon opened it up to everybody else. Each of
these 3,000- to 4,000-pound solar-powered satellites circles the globe at about 12,000 miles (19,300
km), making two complete rotations every day. The orbits are arranged so that at anytime, anywhere
on Earth, there are at least four satellites "visible" in the sky.
A GPS receiver calculates its position by precisely timing the signals sent by
GPS satellites high above the Earth. Each satellite continually transmits messages that include the
time the message was transmitted precise orbital information (the ephemeris) the general system
health and rough orbits of all GPS satellites (the almanac).
The receiver uses the messages it receives to determine the transit time of each message and
computes the distance to each satellite. These distances along with the satellites' locations are used
with the possible aid of trilateration, depending on which algorithm is used, to compute the position
of the receiver. This position is then displayed, perhaps with a moving map display or latitude and
longitude; elevation information may be included. Many GPS units show derived information such as
direction and speed, calculated from position changes.
5.2 GPS Principle:
The GPS satellites act as reference points from which receivers on the ground detect their
position. The fundamental navigation principle is based on the measurement of pseudo ranges
between the user and four satellites. Ground stations precisely monitor the orbit of every satellite and
by measuring the travel time of the signals transmitted from the satellite four distances between
receiver and satellites will yield accurate position, direction and speed. Though three - range

15
measurements are sufficient, the fourth observation is essential for solving clock synchronization
error between receiver and satellite. Thus, the term ―pseudo ranges‖ is derived. The secret of GPS
measurement is due to the ability of measuring carrier phases to about 1/100 of a cycle equalling to 2
to 3 mm in linear distance. Moreover the high frequency L1 and L2 carrier signal can easily penetrate
the ionosphere to reduce its effect. Dual frequency observations are important for large station
separation and for eliminating most of the error parameters.
Figure 5.1 GPS Principle
5.3 GPS Receiver:
A GPS navigation device is any device that receives Global Positioning System (GPS)
signals for the purpose of determining the device's current location on Earth. GPS devices
provide latitude and longitude information, and some may also calculate altitude, although this is not
considered sufficiently accurate or continuously available enough (due to the possibility of signal
blockage and other factors) to rely on exclusively to pilot aircraft. GPS devices are used in military,
aviation, marine and consumer product applications.
The user segment is composed of hundreds of thousands of U.S. and allied military users of
the secure GPS Precise Positioning Service, and tens of millions of civil, commercial and scientific
users of the Standard Positioning Service.

16
GPS receivers are composed of an antenna, tuned to the frequencies transmitted by the
satellites, receiver-processors, and a highly stable clock (often a crystal oscillator). They may also
include a display for providing location and speed information to the user. A receiver is often
described by its number of channels: this signifies how many satellites it can monitor simultaneously.
Originally limited to four or five, this has progressively increased over the years so that, as of 2007,
receivers typically have between 12 and 20 channels. GPS receivers may include an input for
differential corrections, using the RTCM SC-104 format. This is typically in the form of an RS-
232 port at 4,800 bit/s speed. Data is actually sent at a much lower rate, which limits the accuracy of
the signal sent using RTCM. Receivers with internal DGPS receivers can outperform those using
external RTCM data. As of 2006, even low-cost units commonly include Wide Area Augmentation
System (WAAS) receivers. Many GPS receivers can relay position data to a PC or other device using
the NMEA 0183 protocol.
5.4 Major Components of a GPS Receiver:
The main components of a GPS receiver are
Antenna with pre-amplifier
RF section with signal identification and signal processing
Micro-processor for receiver control, data sampling and data processing
oscillator
Power supply
User interface, command and display panel
Memory, data storage
5.5 Function Of GPS:
It is a "constellation" of twenty-four 20,000km high GPS satellites. The satellites are
distributed on 6 orbits, 4 per orbit. Every satellite makes a complete rotation of the Earth every 12
hours. Every satellite possesses an atomic clock, allowing a very precise measure of time. They emit
on two different frequencies: L1: 1575 MHz and L2: 1227 MHz. L2 being reserved for the American
Army.
Every satellite thus sends ceaselessly a code of 1500 bits, containing numerous data such as
the time at which the code is to be sent, the position of the satellite, its state, the position of the other
satellites... This data allows the receiver to calculate its position.
Each GPS satellite transmits radio signals that enable the GPS receivers to calculate where its (or
your vehicles) location on the Earth and convert the calculations into geodetic latitude, longitude and

17
velocity. A receiver needs signals from at least three GPS satellites to pinpoint your vehicle‘s
position.
GPS Receivers commonly used in most Vehicle tracking systems can only receive data from
GPS Satellites. They cannot communicate back with GPS or any other satellite.
A system based on GPS can only calculate its location but cannot send it to central control
room. In order to do this they normally use GSM-GPRS Cellular networks connectivity using
additional GSM modem/module.Two levels of navigation and positioning are offered by the Global
Positioning System: The Standard Positioning Service (SPS). and the Precise Positioning Service
(PPS). The Precise Positioning Service is a highly accurate positioning, velocity and timing service
that is designed primarily for the military and other authorized users, although under certain
conditions can be used by civilians who have specialized equipment. The Standard Positioning
Service offers a base-line accuracy that is much lower than the PPS, but is available to all users with
even the most inexpensive receivers. As we will see, there are various techniques available that
substantially increase the SPS accuracy, even well beyond that which is offered by the PPS.
Published specifications for the Precise Positioning Service are:
• 17.8 meter horizontal accuracy
• 27.7 meter vertical accuracy
• 100 nanosecond time accuracy
Published specifications for the Standard Positioning Service are:
• 100 meter horizontal accuracy
• 156 meter vertical accuracy
• 167 nanoseconds time accuracy.
5.6 RECEIVER OUTPUT:
Typically receivers provide two different formats.
1. NMEA (Nation Marine Electronics Association)
ASCII Format
Defines a set of standard messages.
2.Proprietary Format

18
Typically Binary
No limit on information transmitted
Receiver output is related to position, velocity and time. The output in the following
Position:
Latitude: degrees: minutes: seconds
Longitude: degrees: minutes: seconds
Altitude m
Velocity:
Speed knots
Heading degrees
Time (UTC):
Date dd/mm/yy
Time hh/mm/ss.sss
GPS receiver gives the latitude, longitude, date, time, speed of the satellite, no of satellites on view
etc…
The National Marine Electronics Association (NMEA) has developed a specification that
defines the interface between various pieces of marine electronic equipment. The standard permits
marine electronics to send information to computers and to other marine equipment. A full copy of
this standard is available for purchase at their web site. None of the information on this site comes
from this standard and I do not have a copy. Anyone attempting to design anything to this standard
should obtain an official copy.
5.7 GPS DEVICE:
Figure 5.2 GPS Device

19
5.8 RECEIVER FEATURES:
12 parallel channel L1 Band SPS GPS.
Very good acquisition and good tracking sensitivity.
Antenna open short detection/protection
Tracking sensitivity:-154dB-m
Acquisition sensitivity –148dB-m
5v and 3.3volt option available.

20
Table 5.1 GPS Receiver Characteristics

21
Most computer programs that provide real time position information understand and expect
data to be in NMEA format. This data includes the complete PVT (position, velocity, time) solution
computed by the GPS receiver. The idea of NMEA is to send a line of data called a sentence that is
totally self-contained and independent from other sentences. There are standard sentences for each
device category and there is also the ability to define proprietary sentences for use by the individual
company. All of the standard sentences have a two-letter prefix that defines the device that uses that
sentence type. (For GPS receivers the prefix is GP.) This is followed by a three-letter sequence that
defines the sentence contents. In addition NMEA permits hardware manufactures to define their own
proprietary sentences for whatever purpose they see fit. All proprietary sentences begin with the letter
P and are followed with 3 letters that identifies the manufacturer controlling that sentence. For
example a Garmin sentence would start with PGRM and Magellan would begin with PMGN.
Each sentence begins with a '$' and ends with a carriage return/line feed sequence and can
be no longer than 80 characters of visible text (plus the line terminators). The data is contained within
this single line with data items separated by commas. The data itself is just ASCII text and may
extend over multiple sentences in certain specialized instances but is normally fully contained in one
variable length sentence. The data may vary in the amount of precision contained in the message. For
example time might be indicated to decimal parts of a second or location may be show with 3 or even
4 digits after the decimal point. Programs that read the data should only use the commas to determine
the field boundaries and not depend on column positions. There is a provision for a checksum at the
end of each sentence, which may or may not be checked by the unit that reads the data. The
checksum field consists of a '*' and two hex digits representing an 8 bit exclusive OR of all characters
between, but not including, the '$' and '*'. A checksum is required on some sentences.
There have been several changes to the standard but for GPS use the only ones that are
likely to be encountered are 1.5 and 2.0 through 2.3. These just specify some different sentence
configurations which may be peculiar to the needs of a particular device thus the GPS may need to be
changed to match the devices being interfaced to. Some GPS's provide the ability configure a custom
set the sentences while other may offer a set of fixed choices. Many GPS receivers simply output a
fixed set of sentences that cannot be changed by the user. The current version of the standard is 3.01.
I have no specific information on this version, but I am not aware of any GPS products that require
conformance to this version.

22
5.8 Hardware Connection:
The hardware interface for GPS units is designed to meet the NMEA requirements. They are
also compatible with most computer serial ports using RS232 protocols, however strictly speaking
the NMEA standard is not RS232. They recommend conformance to EIA-422. The interface speed
can be adjusted on some models but the NMEA standard is 4800 b/s (bit per second rate) with 8 bits
of data, no parity, and one stop bit. All units that support NMEA should support this speed. Note that,
at a b/s rate of 4800, you can easily send enough data to more than fill a full second of time. For this
reason some units only send updates every two seconds or may send some data every second while
reserving other data to be sent less often. In addition some units may send data a couple of seconds
old while other units may send data that is collected within the second it is sent. Generally time is
sent in some field within each second so it is pretty easy to figure out what a particular GPS is doing.
Some sentences may be sent only during a particular action of the receiver such as while following a
route while other receivers may always send the sentence and just null out the values. Other
difference will be noted in the specific data descriptions defined later in the text.
At 4800 b/s you can only send 480 characters in one second. Since an NMEA sentence can
be as long as 82 characters you can be limited to less than 6 different sentences. The actual limit is
determined by the specific sentences used, but this shows that it is easy to overrun the capabilities if
you want rapid sentence response. NMEA is designed to run as a process in the background spitting
out sentences which are then captured as needed by the using program. Some programs cannot do
this and these programs will sample the data stream, then use the data for screen display, and then
sample the data again. Depending on the time needed to use the data there can easily be a lag of 4
seconds in the responsiveness to changed data. This may be fine in some applications but totally
unacceptable in others. For example a car traveling at 60 mph will travel 88 feet in one second.
Several second delays could make the entire system seem unresponsive and could cause you to miss
your turn.
The NMEA standard has been around for many years (1983) and has undergone several
revisions. The protocol has changed and the number and types of sentences may be different
depending on the revision. Most GPS receivers understand the standard, which is called: 0183
version 2. This standard dictates a transfer rate of 4800 b/s. Some receivers also understand older
standards. The oldest standard was 0180 followed by 0182, which transferred data at 1200 b/s. Some
receivers also understand an earlier version of 0183 called version 1.5. Some Garmin units and other

23
brands can be set to 9600 for NMEA output or even higher but this is only recommended if you have
determined that 4800 works ok and then you can try to set it faster. Setting it to run as fast as you can
may improve the responsiveness of the program.
5.9 Types of Errors:
There are two types of positioning errors: correctable and non-correctable. Correctable
errors are the errors that are essentially the same for two GPS receivers in the same area. Non-
correctable errors cannot be correlated between two GPS receivers in the same area.
Correctable Errors
Sources of correctable errors include satellite clock, ephemeris data and ionosphere and
tropospheric delay. If implemented, SA may also cause a correctable positioning error. Clock errors
and ephemeris errors originate with the GPS satellite. A clock error is a slowly changing error that
appears as a bias on the pseudorange measurement made by a receiver. An ephemeris error is a
residual error in the data used by a receiver to locate a satellite in space. Ionosphere delay errors and
tropospheric delay errors are caused by atmospheric conditions. Ionospheric delay is caused by the
density of electrons in the ionosphere along the signal path. A tropspheric delay is related to
humidity, temperature, and altitude along the signal path. Usually, a tropospheric error is smaller than
an ionospheric error. Another correctable error is caused by SA which is used by U.S Department of
Defence to introduce errors into Standard Positioning Service (SPS) GPS signals to degrade fix
accuracy. The amount of error and direction of the error at any given time does not change rapidly.
Therefore, two GPS receivers that are sufficiently close together will observe the same fix error, and
the size of the fix error can be determined.
Non-Correctable Errors
Non-correctable errors cannot be correlated between two GPS receivers that are located in
the same general area. Sources of non-correctable errors include receiver noise, which is unavoidably
inherent in any receiver, and multipath errors, which are environmental. Multi-path errors are caused
by the receiver ―seeing‖ reflections of signals that have bounced off of surrounding objects. The sub-
meter antenna is multipath-resistant; its use is required when logging carrier phase data. Neither error
can be eliminated with differential, but they can be reduced substantially with position fix averaging.

24
CHAPTER 6
SPARTAN 3E BOARD
6.1 Concept of Field-programmable Gate Array (FPGA):
A Field-programmable Gate Array (FPGA) is an integrated circuit designed to be
configured by the customer or designer after manufacturing—hence "field-programmable". The
FPGA configuration is generally specified using a hardware description language (HDL), similar to
that used for an application-specific integrated circuit (ASIC) (circuit diagrams were previously used
to specify the configuration, as they were for ASICs, but this is increasingly rare). FPGAs can be
used to implement any logical function that an ASIC could perform. The ability to update the
functionality after shipping, partial re-configuration of the portion of the design and the low non-
recurring engineering costs relative to an ASIC design (notwithstanding the generally higher unit
cost), offer advantages for many applications.
FPGAs contain programmable logic components called "logic blocks", and a hierarchy of
reconfigurable interconnects that allow the blocks to be "wired together"—somewhat like many
(changeable) logic gates that can be inter-wired in (many) different configurations. Logic blocks can
be configured to perform complex combinational functions, or merely simple logic gates like
AND and XOR. In most FPGAs, the logic blocks also include memory elements, which may be
simple flip-flops or more complete blocks of memory.
In addition to digital functions, some FPGAs have analog features. The most common
analog feature is programmable slew rate and drive strength on each output pin, allowing the
engineer to set slow rates on lightly loaded pins that would otherwise ring unacceptably, and to set
stronger, faster rates on heavily loaded pins on high-speed channels that would otherwise run too
slow. Another relatively common analog feature is differential comparators on input pins designed to
be connected to differential signalling channels. A few "mixed signal FPGAs" have integrated
peripheral Analog-to-Digital Converters (ADCs) and Digital-to-Analog Converters (DACs) with
analog signal conditioning blocks allowing them to operate as a system-on-a-chip. Such devices blur
the line between an FPGA, which carries digital ones and zeros on its internal programmable
interconnect fabric, and field-programmable analog array (FPAA), which carries analog values on its
internal programmable interconnect fabric.
Architecture of FPGA:

25
The most common FPGA architecture consists of an array of logic blocks (called
Configurable Logic Block, CLB, or Logic Array Block, LAB, depending on vendor), I/O pads, and
routing channels. Generally, all the routing channels have the same width (number of wires).
Multiple I/O pads may fit into the height of one row or the width of one column in the array.
An application circuit must be mapped into an FPGA with adequate resources. While the number of
CLBs/LABs and I/Os required is easily determined from the design, the number of routing tracks
needed may vary considerably even among designs with the same amount of logic. For example,
a crossbar switch requires much more routing than a systolic array with the same gate count. Since
unused routing tracks increase the cost (and decrease the performance) of the part without providing
any benefit, FPGA manufacturers try to provide just enough tracks so that most designs that will fit
in terms of LUTs and IOs can be routed. This is determined by estimates such as those derived
from Rent's rule or by experiments with existing designs.
In general, a logic block (CLB or LAB) consists of a few logical cells (called ALM, LE,
Slice etc). A typical cell consists of a 4-input Lookup table (LUT), a Full adder (FA) and a D-type
flip-flop, as shown below. The LUTs are in this figure split into two 3-input LUTs. In normal
mode those are combined into a 4-input LUT through the left mux. In arithmetic mode, their outputs
are fed to the FA. The selection of mode is programmed into the middle mux. The output can be
either synchronous or asynchronous, depending on the programming of the mux to the right, in the
figure example. In practice, entire or parts of the FA are put as functions into the LUTs in order to
save space.
Figure 6.1 Example of a logic cell
ALMs and Slices usually contain 2 or 4 structures similar to the example figure, with some
shared signals.CLBs/LABs typically contain a few ALMs/LEs/Slices.In recent years, manufacturers
have started moving to 6-input LUTs in their high performance parts, claiming increased
performance.

26
Since clock signals (and often other high-fanout signals) are normally routed via special-
purpose dedicated routing networks in commercial FPGAs, they and other signals are separately
managed.
For this example architecture, the locations of the FPGA logic block pins are shown below.
Figure 6.2 Logic Block Pin Locations
Each input is accessible from one side of the logic block, while the output pin can connect to
routing wires in both the channel to the right and the channel below the logic block.Each logic block
output pin can connect to any of the wiring segments in the channels adjacent to it.
Similarly, an I/O pad can connect to any one of the wiring segments in the channel adjacent to it. For
example, an I/O pad at the top of the chip can connect to any of the W wires (where W is the channel
width) in the horizontal channel immediately below it.
FPGA designing and Programming:
To define the behavior of the FPGA, the user provides a hardware description
language (HDL) or a schematic design. The HDL form is more suited to work with large structures
because it's possible to just specify them numerically rather than having to draw every piece by hand.
However, schematic entry can allow for easier visualisation of a design.
Then, using an electronic design automation tool, a technology-mapped netlist is generated. The
netlist can then be fitted to the actual FPGA architecture using a process called place-and-route,
usually performed by the FPGA company's proprietary place-and-route software. The user will
validate the map, place and route results via timing analysis, simulation, and
other verification methodologies. Once the design and validation process is complete, the binary file
generated (also using the FPGA company's proprietary software) is used to (re)configure the FPGA.
Going from schematic/HDL source files to actual configuration: The source files are fed to a software
suite from the FPGA/CPLD vendor that through different steps will produce a file. This file is then

27
transferred to the FPGA/CPLD via a serial interface (JTAG) or to an external memory device like
an EEPROM.
The most common HDLs are VHDL and Verilog, although in an attempt to reduce the
complexity of designing in HDLs, which have been compared to the equivalent of assembly
languages, there are moves to raise the abstraction level through the introduction of alternative
languages. National Instrument's Lab VIEW graphical programming language ( sometimes referred
to as "G" ) has an FPGA add-in module available to target and program FPGA hardware. The
LabVIEW approach drastically simplifies the FPGA programming process.
To simplify the design of complex systems in FPGAs, there exist libraries of predefined
complex functions and circuits that have been tested and optimized to speed up the design process.
These predefined circuits are commonly called IP cores, and are available from FPGA vendors and
third-party IP suppliers (rarely free and typically released under proprietary licenses). Other
predefined circuits are available from developer communities such as Open Cores (typically released
under free and open source licenses such as the GPL, BSD or similar license), and other sources.
In a typical design flow, an FPGA application developer will simulate the design at multiple stages
throughout the design process. Initially the RTL description in VHDL or Verilog is simulated by
creating test benches to simulate the system and observe results. Then, after the synthesis engine has
mapped the design to a netlist, the netlist is translated to a gate level description where simulation is
repeated to confirm the synthesis proceeded without errors. Finally the design is laid out in the FPGA
at which point propagation delays can be added and the simulation run again with these values back-
annotated onto the netlist.
6.2 Features of SPARTAN 3E Board:
* 100,000-gate Xilinx Spartan-3E XC3S100E FPGA in a 144-Thin Quad Flat Pack
package (XC3S100E-TQ144)
2,160 logic cell equivalents
Four 18K-bit block RAMs (72K bits)
Four 18x18 pipelined hardware multipliers
Two Digital Clock Managers (DCMs)
* 32 Mbit Intel Strata Flash
* 3 numbers of 20 pin header to interface VLSI based experiment modules
* 8 input Dip Switches

28
* 8 output Light Emitting Diodes(LEDs)
* On Board programmable oscillator (3 to 200 MHz)
* 16x2 Alphanumeric LCD
* RS232 UART
* 4 Channel 8 Bit I2C based ADC & single Channel DAC
* PS/2 Keyboard/Mouse
* Prototyping area for user applications
* On Board configuration Flash PROM XCF01S
6.3 Architecture of Spartan 3E Board:
Power Switch: The Spartan-3E Low Cost Kit has a slide power switch. Moving the power
switch Up for Power On and down for power off.
Configuration Switch: The Spartan-3E Low Cost Kit has a push button Switch to
Configure the FPGA from Xilinx Serial Flash PROM.
Input Switches: The Spartan-3E Low Cost Kit has 8 way Dip switches for giving inputs to
the FPGA i/o lines.
Dip Switch connections with FPGA:
Table 6.1 DIP switch connections with FPGA

29
Figure 6.3 Architecture of SPARTAN 3E Board

30
Figure 6.4 SPARTAN 3E Board
Output LEDs: The Spartan-3E Low Cost Kit has 8 individual surface-mount LEDs. The
LEDs are labelled L3 to L10.The cathode of each LED connects to ground. To light an individual
LED, drive the associated FPGA control signal High.
LED connections with FPGA:
Table 6.2 LED pin connections with FPGA

31
Character LCD Screen:
The Spartan-3E Low Cost Kit prominently features a 2-line by 16-character liquid crystal
display
(LCD). The FPGA controls the LCD via the 8-bit data interface.
LCD Connections with FPGA:
Table 6.3 LCD pin connections with FPGA
Analog to digital converter & digital to Analog converter:
Figure 6.5 Pin Configuration of PCF 8591
The PCF8591 is a single-chip, single-supply low power 8-bit CMOS data acquisition device
with four analog inputs, one analog output and a serial I2C-bus interface. Three address pins A0, A1
and A2 are used for programming the hardware address, allowing the use of up to eight devices
connected to the I2C-bus without additional hardware. Address, control and data to and from the
device are transferred serially via the two-line bidirectional I2C-bus. The functions of the device
include analog input multiplexing, on-chip track and hold function, 8-bit analog-to-digital conversion
and an 8-bit digital-to-analog conversion. The maximum conversion rate is given by the maximum
speed of the I2C-bus.

32
Figure 6.6 : Port Configuration of Spartan Processor

33
CHAPTER 7
ACCELEROMETER SENSOR
7.1 Accelerometer Basics:
Accelerometers are sensors or transducers that measure acceleration. Accelerometers
generally measure acceleration forces applied to a body by being mounted directly onto a surface of
the accelerated body. Accelerometers are useful in detecting motion in objects.
An accelerometer measures force exerted by a body as a result of a change in the velocity of
the body. A moving body possesses an inertia which tends to resist change in velocity. It is this
resistance to change in velocity that is the source of the force exerted by the moving body. This force
is directly proportional to the acceleration component in the direction of movement when the moving
body is accelerated. The motion is detected in a sensitive portion of the accelerometer. This motion is
indicative of motion in the larger object or application in which the accelerometer is mounted. Thus,
a sensitive accelerometer can quickly detect motion in the application.
7.2 ADXL3XX:
3 Axis Acceleration Sensor Board based on ADXL3XX from Analog devices. It is a first
generation 3 axis acceleration sensor. User could get acceleration value of X, Y, and Z axis. And it is
widely used in shock, slope, and moving detection. Output sensitivity could be select by simply set
voltage level on few pins. The output of MMA7260Q is analog mode, so you need a A/D converter
to read the acceleration value.
7.3 FEATURES OF ADXL3XX :
3-axis sensing Small, low profile package 4 mm × 4 mm × 1.45 mm
LFCSP Low power : 350 mA (typical) Single-Supply operation: 1.8 V to 3.6 V
10,000 g shock survival
Excellent temperature stability
BW adjustment with a single capacitor per axis
RoHS/WEEE lead-free compliant

34
7.4 Functional Block Diagram:
Figure 7.1 Functional Block Diagram of ADXL335
Pin Configuration:
Figure 7.2 Pin Configuration of ADXL335

35
Table 7.1 Pin Function Descriptions of ADXL335
7.5 THEORY OF OPERATION :
The ADXL335 is a complete 3-axis acceleration measurement system. The ADXL335 has a
measurement range of ±3 g mini-mum. It contains a polysilicon surface-micromachined sensor and
signal conditioning circuitry to implement an open-loop acceleration measurement architecture. The
output signals are analog voltages that are proportional to acceleration. The accelerometer can
measure the static acceleration of gravity in tilt-sensing applications as well as dynamic acceleration
resulting from motion, shock, or vibration.
The sensor is a polysilicon surface-micromachined structure built on top of a silicon wafer.
Polysilicon springs suspend the structure over the surface of the wafer and provide a resistance
against acceleration forces. Deflection of the structure is meas-ured using a differential capacitor that
consists of independent fixed plates and plates attached to the moving mass. The fixed plates are
driven by 180° out-of-phase square waves. Acceleration deflects the moving mass and unbalances the
differential capacitor resulting in a sensor output whose amplitude is proportional to acceleration.
Phase-sensitive demodulation techniques are then used to determine the magnitude and direction of
the acceleration.
The demodulator output is amplified and brought off-chip through a 32 kΩ resistor. The user
then sets the signal bandwidth of the device by adding a capacitor. This filtering improves
measurement resolution and helps prevent aliasing.

36
Performance :
Rather than using additional temperature compensation circuit, innovative design techniques
ensure that high performance is built in to the ADXL335. As a result, there is no quantizat ion error or
nonmonotonic behavior, and temperature hysteresis is very low (typically less than 3 mg over the
−25°C to +70°C temperature range).
Setting The Bandwidth Using Cx, Cy, And Cz :
The ADXL335 has provisions for band limiting the XOUT, YOUT, and ZOUT pins.
Capacitors must be added at these pins to imple-ment low-pass filtering for antialiasing and noise
reduction. The equation for the 3 dB bandwidth is
F−3 dB = 1/(2π(32 kΩ) × C(X, Y, Z))
or more simply
F–3 dB = 5 μF/C(X, Y, Z)
The tolerance of the internal resistor (RFILT) typically varies as much as ±15% of its
nominal value (32 kΩ), and the bandwidth varies accordingly. A minimum capacitance of 0.0047 μF
for CX, CY, and CZ is recommended in all cases.
7.6 Applications of Accelerometer Sensor:
Tilt-sensing applications
Mobile devices
Gaming systems
Disk drive protection
Image stabilization
Sports and health devices
Accelerometers have uses in many commercial, military, and scientific applications
including inertial navigation, vehicular safety systems such as airbags, ride comfort
control, platform stabilization, tilt sensing, and vibration monitoring.
Accelerometers find use in automobile suspension systems, vehicle air bag systems,
anti-lock brake systems (ABS), vibrometers, and computer hard disc drivers, smart
detonation systems for bombs and missiles and machine vibration monitors. A disk
drive employs an accelerometer to detect disturbances affecting an actuator arm
while attempting to maintain a head over a centreline of a track. The output of the
accelerometer is used as a feed-forward compensation signal in a
servo control system to effectively reject the disturbance.

37
Accelerometers have been employed to help determine the acceleration or
deceleration of a ship or plane, to monitor the forces being applied to an apparatus or
device, such as a car, train, bus, and the like.
Accelerometers are used as a GPS-aid to obtain position information when the GPS
receivers lose their line-of-sight with the satellites.
Accelerometers are widely used to monitor the vibration of electrical motors, pumps
and the like in industrial applications, especially in continuous production
operations. Changes in vibration levels, particularly in rotating machinery, provide
an advance warning of problems such as excessive wear or an
approaching bearing failure.
Electromechanical accelerometers have been used in washing machines to detect an
unbalanced load by sensing the sharp accelerations and decelerations of the spinning
tub as it rocks back and forth.
An accelerometer can measure changes in a patient's physical activity. The physical
changes are detected by the accelerometer and algorithmically interpreted by
circuitry within the pulse generator to produce a modified therapy that is correct for
the current activity level. The accelerometer is placed within the implantable medical
device.
Accelerometers are also used to detect and record environmental data. In particular,
accelerometers are often used in seismic applications to gather seismic data.
In the area of oilfield investigation and earth formation characterization,
accelerometers may be deployed in wire line applications, logging while drilling
applications or using coiled tubing.
7.7 I2C BUS:
The I2C bus was designed by Philips in the early '80s to allow easy communication between
components which reside on the same circuit board. Philips Semiconductors migrated to NXP in
2006.
The name I2C translates into "Inter IC". Sometimes the bus is called IIC or I²C bus.
The original communication speed was defined with a maximum of 100 kbit per second and many
applications don't require faster transmissions. For those that do there is a 400 kbit fastmode and -
since 1998 - a high speed 3.4 Mbits option available. Recently, fast mode plus a transfer rate
between this has been specified.

38
I2C is not only used on single boards, but also to connect components which are linked via
cable. Simplicity and flexibility are key characteristics that make this bus attractive to many
applications.
Most significant features include:
Only two bus lines are required
No strict baud rate requirements like for instance with RS232, the master generates a bus
clock
Simple master/slave relationships exist between all components
Each device connected to the bus is software-addressable by a unique address
I2C is a true multi-master bus providing arbitration and collision detection
7.7.1 FEATURES OF I2C BUS:
Single power supply
Operating supply voltage 2.5 V to 6 V
Low standby current
Serial input/output via I2C-bus
Address by 3 hardware address pins
Sampling rate given by I2C-bus speed
4 analog inputs programmable as single-ended or Differential inputs
Auto-incremented channel selection
Analog voltage range from VSS to VDD
On-chip track and hold circuit
8-bit successive approximation A/D conversion
Multiplying DAC with one analog output.
Figure 7.3 : Pin Configuration of IC 8591

39
7.7.2 GENERAL DESCRIPTION OF PCF8591:
The PCF8591 is a single-chip, single-supply low power 8-bit CMOS data acquisition device
with four analog inputs, one analog output and a serial I2C-bus interface. Three address pins A0, A1
and A2 are used for programming the hardware address, allowing the use of up to eight devices
connected to the I2C-bus without additional hardware. Address, control and data to and from the
device are transferred serially via the two-line bidirectional I2C-busThe maximum conversion rate is
given by the maximum speed of the I2C-bus.
7.7.3 Addressing:
Each PCF8591 device in an I2C-bus system is activated by sending a valid address to the
device. The address consists of a fixed part and a programmable part. The programmable part must
be set according to the address pins A0, A1 and A2. The address always has to be sent as the first
byte after the start condition in the I2C-bus protocol. The last bit of the address byte is the read/write-
bit which sets the direction of the following data transfer.
Fig 7.4 : Address Byte in I2C
7.7.4 Control byte:
The second byte sent to a PCF8591 device will be stored in its control register and is
required to control the device function. The upper nibble of the control register is used for enabling
the analog output, and for programming the analog inputs as single-ended or differential inputs. The
lower nibble selects one of the analog input channels defined by the upper nibble. If the auto-
increment flag is set the channel number is incremented automatically after each A/D conversion. If
the auto-increment mode is desired in applications where the internal oscillator is used, the analog
output enable flag in the control byte (bit 6) should be set. This allows the internal oscillator to run
continuously, thereby preventing conversion errors resulting from oscillator start-up delay. The
analog output enable flag may be reset at other times to reduce quiescent power consumption. The
selection of a non-existing input channel results in the highest available channel number being
allocated. Therefore, if the auto-increment flag is set, the next selected channel will be always
channel 0. The most significant bits of both nibbles are reserved for future functions and have to be
set to 0. After a Power-on reset condition all bits of the control register are reset to 0. The D/A
converter and the oscillator are disabled for power saving. The analog output is switched to a high-
impedance state.

40
CHAPTER 8
DESIGN OF SYSTEM SOFTWARE
8.1 Xilinx SOFTWARE :
Xilinx ISE is a software tool produced by Xilinx for synthesis and analysis of HDL designs,
which enables the developer to synthesize ("compile") their designs, perform timing analysis,
examine RTL diagrams, simulate a design's reaction to different stimuli, and configure the target
device with the programmer.
Xilinx, Inc. (NASDAQ: XLNX) is a supplier of programmable logic devices. It is known
for inventing the field programmable gate array (FPGA) and as the first semiconductor company with
a fabless manufacturing model. Founded in Silicon Valley in 1984, the company
is headquartered in San Jose, California, U.S.A.; Dublin, Ireland; Singapore; and Tokyo, Japan. The
company has corporate offices throughout North America, Asia and Europe.
8.2 XilinX Web Edition:
The Web Edition is a free version of Xilinx ISE that can be downloaded or delivered by
mail for free. This edition provides synthesis and programming for a limited number
of Xilinx devices. In particular devices with lots of I/O and huge gate matrix are disabled.
The low-cost Spartan™ family of FPGAs is fully supported by this edition, as well as the family
of CPLDs, meaning small developers and educational institutions have no overheads from the cost of
development software.
License registration is required to use the Web Edition of Xilinx ISE, which is free and can be
renewed an unlimited number of times.
The 12.2 version released in 2010-07-23 has a size of 3.02 GB.
8.3 VHDL:
VHDL (VHSIC hardware description language) is a hardware description language used
in electronic design automation to describe digital and mixed-signal systems such as field-
programmable gate arrays and integrated circuits.

41
8.4 Design Flow in VHDL :
Figure 8.1 Design Flow in VHDL
VHDL is commonly used to write text models that describe a logic circuit. Such a model is
processed by a synthesis program, only if it is part of the logic design. A simulation program is used
to test the logic design using simulation models to represent the logic circuits that interface to the
design. This collection of simulation models is commonly called a testbench.
VHDL has constructs to handle the parallelism inherent in hardware designs, but these
constructs (processes) differ in syntax from the parallel constructs in Ada (tasks). Like Ada, VHDL
is strongly typed and is not case sensitive. In order to directly represent operations which are
common in hardware, there are many features of VHDL which are not found in Ada, such as an
extended set of Boolean operators including nand and nor. VHDL also allows arrays to be indexed
in either ascending or descending direction; both conventions are used in hardware, whereas in Ada
and most programming languages only ascending indexing is available.
VHDL has file input and output capabilities, and can be used as a general-purpose language
for text processing, but files are more commonly used by a simulation testbench for stimulus or

42
verification data. There are some VHDL compilers which build executable binaries. In this case, it
might be possible to use VHDL to write a testbench to verify the functionality of the design using
files on the host computer to define stimuli, to interact with the user, and to compare results with
those expected. However, most designers leave this job to the simulator.
It is relatively easy for an inexperienced developer to produce code that simulates
successfully but that cannot be synthesized into a real device, or is too large to be practical. One
particular pitfall is the accidental production of transparent latches rather than D-type flip-flops as
storage elements.
One can design hardware in a VHDL IDE (for FPGA implementation such as Xilinx ISE,
Altera Quartus, Synopsys Synplify or Mentor Graphics HDL Designer) to produce the RTL
schematic of the desired circuit. After that, the generated schematic can be verified using simulation
software which shows the waveforms of inputs and outputs of the circuit after generating the
appropriate testbench. To generate an appropriate testbench for a particular circuit or VHDL code,
the inputs have to be defined correctly. For example, for clock input, a loop process or an iterative
statement is required.
A final point is that when a VHDL model is translated into the "gates and wires" that are
mapped onto a programmable logic device such as a CPLD or FPGA, and then it is the actual
hardware being configured, rather than the VHDL code being "executed" as if on some form of a
processor chip.
8.5 Creating a New project:
Create a new ISE project which will target the FPGA device on the Spartan-3 Startup Kit
demo board.
To create a new project:
1. Select File > New Project... The New Project Wizard appears.
2. Type tutorial in the Project Name field.
3. Enter or browse to a location (directory path) for the new project. A tutorial
subdirectory is created automatically.
4. Verify that HDL is selected from the Top-Level Source Type list.
5. Click Next to move to the device properties page.
6. Fill in the properties in the table as shown below:
♦ Product Category: All

43
♦ Family: Spartan3
♦ Device: XC3S200
♦ Package: FT256
♦ Speed Grade: -4
♦ Top-Level Source Type: HDL
♦ Synthesis Tool: XST (VHDL/Verilog)
♦ Simulator: ISE Simulator (VHDL/Verilog)
♦ Preferred Language: Verilog (or VHDL)
♦ Verify that Enable Enhanced Design Summary is selected.
8.6 Program:
--Project describes that SMS based device control
--System Clock is 20 Mhz
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
entity gsm_msg is
Port (clk : in std_logic;
txd : out std_logic;
rxd :in std_logic;
rxd1:in std_logic;
sda:inout std_logic;
sclk : out std_logic;
rs : out std_logic;
diow : out std_logic; -
- ---LCD
cs : out std_logic;
d : inout std_logic_vector(7 downto 0);
led :out std_logic_vector(7 downto 0));
end gsm_msg;
architecture Behavioral of gsm_msg is
type main1 is array(1 to 5) of std_logic_vector(7 downto 0);
signal state1:main1:=(x"38",x"06",x"01",x"0c",x"80"); -- LCD
commands

44
type main3 is array(1 to 13) of std_logic_vector(7 downto 0);
signal
state3:main3:=(x"61",x"5f",x"78",x"3a",x"20",x"20",x"20",x"61",x"5f",x"79",x"3a",x"20",x"20");
--a_x: a_y: (for lcd)
type data1 is array(1 to 16) of std_logic_vector(7 downto 0);
signal
data_disp1:data1:=(x"56",x"65",x"68",x"69",x"63",x"6c",x"65",x"20",x"54",x"72",x"61",x"63",x"6b
",x"69",x"6e",x"67"); ---- vehicle tracking
type data2 is array(1 to 11) of std_logic_vector(7 downto 0);
signal data_disp2:data2:=( x"20",x"20",x"20",x"53",
x"79",x"73",x"74",x"65",x"6d",x"20",x"20");
---- system
type rec_data is array (1 to 3) of std_logic_vector(7 downto 0);
signal rx_buff : rec_data;
-- store Rx data
type main_lcd is (s1,s2,s3,s4,s5);
signal state_lcd:main_lcd;
type main_adc is (s1,s2,s3,s4);
signal state_adc:main_adc;
signal sign,sign4 : std_logic_vector(25 downto 0) := "00000000000000000000000000";
signal sign1 : std_logic_vector(25 downto 0) := "00000000000000000000000000";
signal lcd1, lcd2,lcd3,lcd4,lcd5,lcd6,lcd7,lcd8 : std_logic_vector(7 downto 0):=x"20";
type pcf is(set1,write1,read1,division_255);
signal adc:pcf;
signal sig:std_logic_vector(4 downto 0);
signal i:integer:=7;
signal k1,k2,k3,k4,k5,j1,j,del,del1,p,p1,g,m:integer:=1;
type main_div is (s1, s2);
signal div_state : main_div;
signal adc_out_int, div1,mul, i1,adc_fb,adc_fb1,adc_fb2,adc_fb3: integer := 0;
constant a_byte_w:std_logic_vector(7 downto 0):="10010000";
--(1 0 0 1 A2 A1 A0 W) ADDRESS BYTE(for write W=0)
constant a_byte_r:std_logic_vector(7 downto 0):="10010001";
--(1 0 0 1 A2 A1 A0 R) ADDRESS BYTE (for read R=1)
constant c0_byte:std_logic_vector(7 downto 0) :="01000100"; --CONTROL BYTE0

45
constant c1_byte:std_logic_vector(7 downto 0) :="01000101"; --CONTROL BYTE1
constant c2_byte:std_logic_vector(7 downto 0) :="01000110"; --CONTROL BYTE2
constant c3_byte:std_logic_vector(7 downto 0) :="01000111"; --CONTROL BYTE3
signal clkdiv:std_logic;
signal div:std_logic_vector(15 downto 0);
signal sig_f,sig_f1,sig_f2,sig_f3 : std_logic_vector(1 downto 0);
signal sig_f5:std_logic_vector(5 downto 0):=(others =>'0');
signal flag_s :std_logic_vector(5 downto 0):="000000";
------------------------------gsm module----------------------------------------------
type gsm_command_in is array (1 to 4) of std_logic_vector(7 downto 0);
constant gsm_cmd_in : gsm_command_in := ( x"41",x"54",x"0d",x"0a");
--AT(Enter)
type gsm_command is array (1 to 11) of std_logic_vector(7 downto 0);
constant gsm_cmd : gsm_command :=
x"41",x"54",x"2B",x"43",x"4D",x"47",x"46",x"3d",x"31",x"0d",x"0a");
--AT+CMGF=1(Enter)
type gsm_command_id is array (1 to 11) of std_logic_vector(7 downto 0);
constant gsm_cmd_id : gsm_command_id := (
x"41",x"54",x"2B",x"43",x"4D",x"47",x"52",x"3d",x"31",x"0d",x"0a"); --AT+CMGR=1(Enter)
type gsm_delete is array (1 to 13) of std_logic_vector(7 downto 0);
constant gsm_del : gsm_delete := (
x"41",x"54",x"2B",x"43",x"4D",x"47",x"44",x"3d",x"31",x"2c",x"34",x"0d",x"0a");
--AT+CMGD=1,4(Enter)
type gsm_msg_no is array (1 to 22) of std_logic_vector(7 downto 0);
constant gsm_msg : gsm_msg_no := ( x"41", x"54", x"2B",x"43",x"4d",x"47",x"53",x"3d",
x"22",x"39", x"35",x"36", x"36", x"35", x"35", x"39",x"36", x"30", x"30",x"22",x"0D", x"0A");
--AT+CMGS="9566559600"Enter [To send Msg]
type gsm_reply is array (1 to 29) of std_logic_vector(7 downto 0);
constant gsm_ack : gsm_reply
:=(x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"0d",x"0a",x"44",x"65",x"76",x"69",x"63",x"
65",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"1a",x"0d",x"0a");
-- Device is controlled
type disp is array (53 to 79) of std_logic_vector(7 downto 0);
signal disp_data_rx : disp;
--Receive msg(device)

46
type ready is array (1 to 7) of std_logic_vector(7 downto 0);
signal ready_data_rx : ready;
--Receive +CMT (for check)
type main_g is (s0,s1,s2,s3,s4,s5,s6,s7,s8,s9,s10,s11,s12,s13);
signal state_g:main_g;
signal flag_enable,ack,flag1 : std_logic;
signal delay : std_logic_vector(11 downto 0) := (others => '0');
signal baud_clk: std_logic ;
signal buff_tx : std_logic_vector(7 downto 0) := (others => '0');
signal bitcnt_tx : std_logic_vector(3 downto 0) := (others => '0');
signal bitcnt_txx : std_logic_vector(3 downto 0) := (others => '0');
constant cntone : std_logic_vector(3 downto 0) := "0001";
signal shift,shift1 : std_logic_vector(7 downto 0);
signal bitcnt_rx : std_logic_vector(3 downto 0) := (others => '0');
signal bitcnt_rx1 : std_logic_vector(4 downto 0) := (others => '0');
---------------------------------gps module----------------------------------------------------------------------
type main3_g is array(1 to 107) of std_logic_vector(7 downto 0);
signal state3_g : main3_g := ( x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"0d",x"0a",
x"54",x"49",x"4d",x"45",x"20",x"3a",x"20",x"20",x"3a",x"20",x"20",x"3a",x"20",x"20",x"20",x"20"
,x"0d",x"0a",x"44",x"41",x"54",x"45",x"20",x"3a",x"20",x"20",x"3a",x"20",x"20",x"3a",x"20",x"20
",x"20",x"20",x"0d",x"0a",x"4c",x"41",x"54",x"54",x"49",x"20",x"3a",x"20",x"20",x"20",x"20",
x"20",x"20",x"20",x"20",x"20"
,x"20",x"20",x"0d",x"0a",x"4c",x"51",x"47",x"49",x"54",x"20",x"3a",x"20",x"20",x"20",x"20",x"20
",x"20",x"20",x"20",x"20",x"20",x"20",x"0d",x"0a",x"56",x"65",x"68",x"69",x"63",x"6c",x"65",x"2
0",x"41",x"63",x"63",x"69",x"64",x"65",x"6e",x"74",x"65",x"64",x"1a",x"0d",x"0a");
---TIME : - -
type main3_g1 is array(1 to 107) of std_logic_vector(7 downto 0);
signal state3_g1 : main3_g1:= (x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"0d",x"0a",
x"54",x"49",x"4d",x"45",x"20",x"3a",x"20",x"20",x"3a",x"20",x"20",x"3a",x"20",x"20",x"20",x"20"
,x"0d",x"0a",x"44",x"41",x"54",x"45",x"20",x"3a",x"20",x"20",x"3a",x"20",x"20",x"3a",x"20",
x"20",x"20",x"20",x"0d",x"0a",x"4c",x"41",x"54",x"54",x"49",x"20",x"3a",x"20",x"20",x"20",x"20"
,x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"0d",x"0a",x"4c",x"51",x"47",x"49",x"54",x"20",
x"3a",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"0d",x"0a",x"20",x"20"
,x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",x"20",
x"20",x"1a",x"0d",x"0a");
signal t,lt,lg,d1, data_t,time_delay,lcd_delay :integer := 1;
signal t1 : integer := 5;
signal lt1 : integer := 18;
signal lg1 : integer := 30;
signal d11 : integer := 55;

47
signal l1,l2,l3,l4,l5,l6,t_1,t_2,t_3,t_4,t_5,t_6:std_logic_vector(7 downto 0):= x"20";
type ready1 is array (1 to 73) of std_logic_vector(7 downto 0);
signal gps_rx,data_rx : ready1;
type main_tx is array (1 to 74) of std_logic_vector(7 downto 0);
signal buff1_tx : main_tx;
type main_time is array (1 to 12) of std_logic_vector(7 downto 0);
signal data_time : main_time;
type main_lt is array (1 to 14) of std_logic_vector(7 downto 0);
signal data_lt: main_lt;
type main_lg is array (1 to 15) of std_logic_vector(7 downto 0);
signal data_lg:main_lg;
type main_d is array (1 to 12) of std_logic_vector(7 downto 0);
signal data_d : main_d;
begin
--------------------------------clock divider------------------------------------------
process(clk)
begin
if clk'event and clk='1' then
div <= div + 1;
case div(15 downto 14) is
when "00" =>
clkdiv <= '1';
when "10" =>
clkdiv <= '0';
when others =>
end case;
end if;
end process;
--------------------------------- Temp value read process -------------------------------------------------------
process(clkdiv)
variable j,l,m,n:std_logic_vector(7 downto 0):="00000000";
begin
if clkdiv'event and clkdiv='1' then
case state_adc is

48
when s1 =>
case adc is
when set1 =>
sig<=sig+1;
case sig(3 downto 0) is
--START CONDITION FOR WRITE CONVERSION
when "0000"=>
sclk <='1';
when "0010" =>
sda <= '1';
when "0011"=>
sda <='0';
when "0100"=>
sclk<='0';
i <= 7;
--ADDRESS BYTE FOR WRITE OPERATION
when "0101" =>
sda <=a_byte_w(i);
sclk<='1';
when "0110" =>
sclk<='0';
if i > 0 then
i <= i - 1;
sig(3 downto 0)<="0101";
else
sig(3 downto 0)<="0111";
i <= 7;
end if;
when "0111"=> --ACKNOWLEDGEMENT
sclk<='1';
when "1000" =>
sclk <='0';
--CONTROL BYTE OPERATION
when "1001"=>
sda <=c0_byte(i);
sclk <='1';
when "1010"=>
if i > 0 then
i <= i - 1;

49
sig(3 downto 0)<="1001";
else
sig(3 downto 0)<="1011";
i <= 7;
end if;
sclk <='0';
when "1011"=> --ACKNOWLEDGEMENT
sclk<='1';
when "1100" =>
sclk <='0';
when "1101" =>
adc<=write1;
sig <= (others => '0');
when others =>
end case;
---------------------------------------------------
--START CONDITION FOR A/D CONVERSION
when write1 =>
sig<=sig+1;
case sig(3 downto 0) is
when "0000"=>
sclk <='1';
when "0010" =>
sda <= '1';
when "0011"=>
sda <='0';
when "0100"=>
sclk<='0';
i <= 7;
--ADDRESS BYTE FOR READ OPERATION
when "0101" =>
sda <=a_byte_r(i);
sclk<='1';
when "0110"=>
if i > 0 then
i <= i - 1;
sig(3 downto 0)<="0101";
else
sig(3 downto 0)<="0111";
i <= 7;
end if;

50
sclk<='0';
when "0111"=> --ACKNOWLEDGEMENT
sda <='Z';
sclk<='1';
when "1000" =>
sclk <='0';
when "1001" =>
adc<=read1;
sig <= (others => '0');
when others =>
end case;
--A/D READ OPERATION
when read1 =>
sig<=sig+1; --FOR EXAMPLE
case sig(3 downto 0) is --sda=11110101
when "0000" =>
sclk<='1';
l:=l(6 downto 0) & sda;
when "0001" =>
if i > 0 then
i <= i - 1;
sig(3 downto 0)<="0000";
else
sig(3 downto 0)<="0010";
i <= 7;
end if;
sclk <='0';
when "0010" =>
sda <='0';
when "0011" =>
sclk <='1';
when "0100" =>
sda <='1';
when "0101" =>
sclk <='0';
sda <='Z';
when "0110" =>

51
adc_out_int <= conv_integer(l); -- Integer Value of
Corresponding Digital data
when "0111" => -- converting the Digital
data(0 to FF) into (0 to 99) by ((data*99)/255)
mul <= adc_out_int * 99;
i1 <= 0;
adc <= division_255;
div_state <= s1;
when others =>
end case;
when division_255 => -- DIVISION UNIT (divisin by 255)
case div_state is
when s1 =>
if (mul >= 255) then
mul <= mul - 255;
i1 <= i1 + 1;
div_state<=s1;
else
if (mul < 127) then
div1 <= i1;
div_state <= s2;
else
div1 <= i1 + 1;
div_state <= s2;
end if;
end if;
when s2 =>
adc_fb <= div1;
--0 to 99 conversion data(adc data)
state_adc <= s2;
adc <= set1;
sig <= (others => '0');
when others =>
end case;
when others =>
end case;
------------------------adc ch1--------------------------
when s2 =>

52
case adc is
when set1 =>
sig<=sig+1;
case sig(3 downto 0) is
--START CONDITION FOR WRITE CONVERSION
when "0000"=>
sclk <='1';
when "0010" =>
sda <= '1';
when "0011"=>
sda <='0';
when "0100"=>
sclk<='0';
i <= 7;
--ADDRESS BYTE FOR WRITE OPERATION
when "0101" =>
sda <=a_byte_w(i);
sclk<='1';
when "0110" =>
sclk<='0';
if i > 0 then
i <= i - 1;
sig(3 downto 0)<="0101";
else
sig(3 downto 0)<="0111";
i <= 7;
end if;
when "0111"=> --ACKNOWLEDGEMENT
sclk<='1';
when "1000" =>
sclk <='0';
--COTNTROL BYTE OPERATION
when "1001"=>
sda <=c1_byte(i);
sclk <='1';
when "1010"=>
if i > 0 then
i <= i - 1;

53
sig(3 downto 0)<="1001";
else
sig(3 downto 0)<="1011";
i <= 7;
end if;
sclk <='0';
when "1011"=> --ACKNOWLEDGEMENT
sclk<='1';
when "1100" =>
sclk <='0';
when "1101" =>
adc<=write1;
sig <= (others => '0');
when others =>
end case;
---------------------------------------------------
--START CONDITION FOR A/D CONVERSION
when write1 =>
sig<=sig+1;
case sig(3 downto 0) is
when "0000"=>
sclk <='1';
when "0010" =>
sda <= '1';
when "0011"=>
sda <='0';
when "0100"=>
sclk<='0';
i <= 7;
--ADDRESS BYTE FOR READ OPERATION
when "0101" =>
sda <=a_byte_r(i);
sclk<='1';
when "0110"=>
if i > 0 then
i <= i - 1;
sig(3 downto 0)<="0101";
else
sig(3 downto 0)<="0111";
i <= 7;
end if;

54
sclk<='0';
when "0111"=> --ACKNOWLEDGEMENT
sda <='Z';
sclk<='1';
when "1000" =>
sclk <='0';
when "1001" =>
adc<=read1;
sig <= (others => '0');
when others =>
end case;
--A/D READ OPERATION
when read1 =>
sig<=sig+1; --FOR EXAMPLE
case sig(3 downto 0) is --sda=11110101
when "0000" =>
sclk<='1';
j:=j(6 downto 0) & sda;
when "0001" =>
if i > 0 then
i <= i - 1;
sig(3 downto 0)<="0000";
else
sig(3 downto 0)<="0010";
i <= 7;
end if;
sclk <='0';
when "0010" =>
sda <='0';
when "0011" =>
sclk <='1';
when "0100" =>
sda <='1';
when "0101" =>
sclk <='0';
sda <='Z';
when "0110" =>

55
adc_out_int <= conv_integer(j); -- Integer Value of
Corresponding Digital data
when "0111" => -- converting the Digital
data(0 to FF) into (0 to 99) by ((data*99)/255)
mul <= adc_out_int * 99;
i1 <= 0;
adc <= division_255;
div_state <= s1;
when others =>
end case;
when division_255 => -- DIVISION UNIT (division by 255)
case div_state is
when s1 =>
if (mul >= 255) then
mul <= mul - 255;
i1 <= i1 + 1;
div_state<=s1;
else
if (mul < 127) then
div1 <= i1;
div_state <= s2;
else
div1 <= i1 + 1;
div_state <= s2;
end if;
end if;
when s2 =>
adc_fb1 <= div1; --0 to 99 conversion
data(adc data)
state_adc<= s1;
adc <= set1;
sig <= (others => '0');
when others =>
end case;
when others =>
end case;
end if;
end process;
process(clk)

56
variable t2 : integer := 0;
variable h3, h4 : integer:=0;
begin
if (clk'event and clk = '1') then
sig_f <= sig_f + 1; --Display Control for ADC FeedBack
case sig_f is
when "00" =>
t2 := adc_fb;
h3 := 0;
h4 := 0;
when "01" =>
if (t2 >= 10) then
h3 := h3 + 1;
t2 := t2 - 10;
sig_f <= "01";
else
h4 := t2;
sig_f <= "10";
end if;
when "10" =>
if h3>=0 and h3<=9 and h4>=0 and h4<=9 then
lcd1 <= conv_std_logic_vector (h3, 8) + x"30";
--(For display the value in LCD (value + 30))
lcd2 <= conv_std_logic_vector (h4, 8) + x"30";
end if;
when others =>
sig_f <= "00";
end case;
end if;
end process;
process(clk)
variable t21 : integer := 0;
variable h31, h41 : integer:=0;
begin
if (clk'event and clk = '1') then
sig_f1 <= sig_f1 + 1; --Display Control for ADC FeedBack
case sig_f1 is
when "00" =>
t21 := adc_fb1;
h31 := 0;

57
h41 := 0;
when "01" =>
if (t21 >= 10) then
h31 := h31 + 1;
t21 := t21 - 10;
sig_f1 <= "01";
else
h41 := t21;
sig_f1 <= "10";
end if;
when "10" =>
if h31>=0 and h31<=9 and h41>=0 and h41<=9 then
lcd3 <= conv_std_logic_vector (h31, 8) + x"30";
--(For display the value in LCD (value + 30))
lcd4 <= conv_std_logic_vector (h41, 8) + x"30";
end if;
when others =>
sig_f1 <= "00";
end case;
end if;
end process;
---------------------------------------- LCD Display --------------------------------------------------
process
begin
if clk'event and clk='1' then
case state_lcd is
when s1 =>
sign <= sign + 1;
case sign(25 downto 20) is
when "000000" => rs <= '0';
diow <= '0';
when "000001" =>
d <= state1(k1); --(lcd command)
when "000010" => cs <= '1';
when "000011" => cs <= '0';
k1<=k1+1;
if k1<=5 then
sign(25 downto 20)<="000001";

58
else
sign(25 downto 20)<="001000";
k2 <= 1;
end if;
when "001000" => rs <= '0';
diow <= '0';
when "001001" =>
d <= x"80"; ---lcd secondline display
when "001010" => cs <= '1';
when "001011" => cs <= '0'; ------(temperature)
when "001100" => rs <= '1';
when "001101" =>
d <= data_disp1(k2); --------lcd display of title
when "001110" => cs <= '1';
when "001111" => cs <= '0';
k2<=k2+1;
if k2<16 then
sign(25 downto 20)<="001101";
else
sign(25 downto 20)<="010000";
k3 <= 1;
end if;
when "010000" => rs <= '0';
diow <= '0';
when "010001" =>
d <= x"c0"; ---lcd secondline display
when "010010" => cs <= '1';
when "010011" => cs <= '0'; ----lcd display of title
when "010100" => rs <= '1';
when "010101" =>
d <= data_disp2(k3);
when "010110" => cs <= '1';
when "010111" => cs <= '0';
k3<=k3+1;
if k3<11 then
sign(25 downto 20)<="010101";
else
sign(25 downto 20)<="011000";

59
k1<=1;
state_lcd<= s2;
end if;
when others =>
end case;
----------------------------------------------------------------------------------
when s2 =>
sign <= sign + 1;
case sign(25 downto 20) is
when "000000" => rs <= '0';
diow <= '0';
when "000001" =>
d <= state1(k1); --(lcd command)
when "000010" => cs <= '1';
when "000011" => cs <= '0';
k1<=k1+1;
if k1<=5 then
sign(25 downto 20)<="000001";
else
sign(25 downto 20)<="001000";
k2 <= 1;
end if;
when "001000" => rs <= '0';
diow <= '0';
when "001001" =>
d <= x"80";
when "001010" => cs <= '1';
when "001011" => cs <= '0';
when "001100" => rs <= '1';
when "001101" =>
d <= state3(k2);
when "001110" => cs <= '1';
when "001111" => cs <= '0';
k2<=k2+1;
if k2<13 then
sign(25 downto 20)<="001101";
else
sign(25 downto 20)<="010000";
k1<=1;

60
state_lcd<= s3;
end if;
when others =>
end case;
-----------------------------------------------------------
when s3 => sign1<=sign1+1;
case sign1(25 downto 20) is
when "000000" => rs <= '0';
diow <= '0';
when "000001" => d <= x"84";
when "000010" => cs <= '1';
when "000011" => cs <= '0';
when "000100" => rs <= '1';
when "000101" => d <= lcd1;
when "000110" => cs <= '1';
when "000 111" => cs <= '0'; --Temperature Value
when "001000" => d <= lcd2;
when "001001" => cs <= '1';
when "001010" => cs <= '0';
when "001011"=> sign1(25 downto 20)<="000000";
state_lcd <= s4;
when others => end case;
when s4 => sign1<=sign1+1;
case sign1(25 downto 20) is
when "000000" => rs <= '0';
diow <= '0';
when "000001" => d <= x"8b";
when "000010" => cs <= '1';
when "000011" => cs <= '0';
when "000100" => rs <= '1';
when "000101" => d <= lcd3;
when "000110" => cs <= '1';
when "000111" => cs <= '0'; --Temperature Value
when "001000" => d <= lcd4;
when "001001" => cs <= '1';
when "001010" => cs <= '0';
when "001011"=> sign1(25 downto 20)<="000000";
state_lcd <= s3;
when others =>

61
end case;
when others =>
end case;
end if;
end process;
---------------------------flag_enable------------------------------------
process(clk)
begin
if (clk = '1' and clk'event) then
flag_s <= flag_s + 1;
case flag_s(2 downto 0) is
when "000" =>
if ( adc_fb>=32 and adc_fb<=34
and adc_fb1>=39 and adc_fb1<=40) then
-- and adc_fb2>=33 and adc_fb2<=34 ) then
flag_enable <= '0';
else
flag_enable <= '1';
flag_s(2 downto 0) <= "000";
end if;
when others =>
end case;
end if;
end process;
-----------------------------------------------------------------------------------
process(clk)
begin
if rising_edge(clk) then
delay <= delay + 1;
case delay is
when "000000000000" => -- 0
baud_clk <= '1';
when "010000010010" => -- 1042
baud_clk <= '0';
when "100000100100" => -- 2083
baud_clk <= '1';
delay <= (others => '0');

62
when others =>
end case;
end if;
end process;
process(baud_clk)
begin
if rising_edge(baud_clk) then
---------------------------------Receive GPS Data-----------------------------------------
case bitcnt_rx1 is
when "00000" =>
if (RxD1 = '1') then -- Start Bit
bitcnt_rx1 <= "00000";
else
bitcnt_rx1 <= bitcnt_rx1 + cntone;
end if;
when "00001" | "00010" | "00011" |
"00100" | "00101" | "00110" |
"00111" | "01000" =>
bitcnt_rx1 <= bitcnt_rx1 + cntone;
shift1 <= RxD1 & shift1(7 downto 1);
when "01001" =>
data_rx(p) <= shift1;
if (p <73) then
p <= p + 1;
bitcnt_rx1<= "00000";
else
p <= 1;
bitcnt_rx1 <= "01010";
end if;
when "01010"=>
if (p<73) then
bitcnt_rx1 <= "01100";
else
p <= 1;
bitcnt_rx1 <= "00000";
end if;
when "01100"=>

63
if (data_rx(p)= x"24") then ---$
p<=p+1;
bitcnt_rx1 <= "01101";
else
if (p<73)then
p<=p+1;
bitcnt_rx1 <="01100";
else
p<= 1;
bitcnt_rx1 <= "00000";
end if;
end if;
when "01101"=>
if (data_rx(p)=x"47") then ---G
p<=p+1;
led2<='1';
bitcnt_rx1 <= "01110";
else
p<= 1;
bitcnt_rx1 <= "00000";
end if;
when "01110" =>
if (data_rx(p)=x"50") then ---P
p<=p+1;
bitcnt_rx1<= "01111";
else
p<= 1;
bitcnt_rx1 <= "00000";
end if;
when "01111"=>
if (data_rx(p)=x"52") then ---R
gps_rx(m)<=data_rx(p);
p<=p+1;
m<=m+1;
-- led4<='1';

64
bitcnt_rx1 <= "10000";
else
p<= 1;
bitcnt_rx1 <= "00000";
end if;
when "10000"=>
if (data_rx(p)=x"4D") then ----M
gps_rx(m)<=data_rx(p);
p<=p+1;
m<=m+1;
bitcnt_rx1 <= "10001";
else
p<= 1;
bitcnt_rx1 <= "00000";
end if;
when "10001"=>
if (data_rx(p)=x"43") then ---c
gps_rx(m)<=data_rx(p);
p<=p+1;
m<=m+1;
bitcnt_rx1 <= "10010";
else
p<= 1;
bitcnt_rx1 <= "00000";
end if;
when "10010"=>
gps_rx(m)<=data_rx(p);
if (p<73)then
-------full data tx
p<=p+1;
m<=m+1;
bitcnt_rx1 <= "10010";
else
m<=1;
p<= 1;
t<=1;
bitcnt_rx1<="10011";
end if ;
when "10011" =>
data_time(t)<=gps_rx(t1);

65
-----time
if (t1<=10)then
t1<=t1+1;
t<=t+1;
bitcnt_rx1 <= "10011";
else
t1<=5;
p<= 1;
t<=1;
bitcnt_rx1<="10100";
end if ;
when "10100" =>
data_lt(lt)<=gps_rx(lt1);
------latitude
if (lt1<=27)then
lt1<=lt1+1;
lt<=lt+1;
bitcnt_rx1 <= "10100";
else
lt1<=18;
p<= 1;
lt<=1;
bitcnt_rx1<="10101";
end if ;
when "10101" =>
data_lg(lg)<=gps_rx(lg1);
if (lg1<=40)then
----longitude
lg1<=lg1+1;
lg<=lg+1;
bitcnt_rx1 <= "10101";
else
lg1<=30;
p<= 1;
lg<=1;
bitcnt_rx1<="10110";
end if ;
when "10110" =>
data_d(d1)<=gps_rx(d11);
-----date

66
if (d11<=60)then
d11<=d11+1;
d1<=d1+1;
bitcnt_rx1 <= "10110";
else
d11<=55 ;
p<= 1;
d1<=1;
bitcnt_rx1<="10111";
end if ;
when "10111"=>
if (del1 <=3000) then
del1 <= del1 + 1 ;
bitcnt_rx1<="10111";
else
m<=1;
p<= 1;
t1<=5;lt1<=17;lg1<=30;d11<=55;
t<=1;lt<=1;lg<=1;d1<=1;
bitcnt_rx1<="00000";
shift1 <= (others => '0');
end if;
when others =>
end case;
end if;
end process;
-----------------------------------------------
process(baud_clk)
begin
if rising_edge(baud_clk) then
case state_g is
when s0 =>
case bitcnt_tx is
when "0000" =>
led <= x"00";
g <= 1;
j <= 1;

67
del <= 1;
bitcnt_tx <= bitcnt_tx + cntone;
when "0001" =>
buff_tx <= gsm_cmd_in(g); ---AT setting
txd <= '0';
bitcnt_tx <= bitcnt_tx + cntone;
when "0010" | "0011" | "0100" |
"0101" | "0110" | "0111" |
"1000" | "1001" =>
bitcnt_tx <= bitcnt_tx + cntone;
txd <= buff_tx(0);
buff_tx <= '1' & buff_tx(7 downto 1);
when "1010" =>
txd <= '1';
if (g < 4) then
g <= g + 1;
bitcnt_tx <= "0001";
else
bitcnt_tx <= "1011";
g <= 1;
end if;
when "1011" =>
if (j < 1) then
if (del <= 10000) then
bitcnt_tx <= "1011";
del <= del + 1;
else
del <= 1;
j <= j + 1;
bitcnt_tx <= "0001";
end if;
else
j <= 1;
bitcnt_tx <= "1100";
end if;
when "1100" =>
bitcnt_tx <= "1100";
state_g <= s1;
when others =>
end case;
when s1 =>
if (del <= 30000) then

68
del <= del + 1;
else
bitcnt_tx <= "0000";
buff_tx <= (others => '0');
g <= 1;
j <= 1;
del <= 1;
state_g <= s2;
end if;
when s2 =>
case bitcnt_tx is
when "0000" =>
led <= x"01";
g <= 1;
j <= 1;
del <= 1;
bitcnt_tx <= bitcnt_tx + cntone;
when "0001" =>
buff_tx <= gsm_cmd(g);
--text mode set
txd <= '0';
bitcnt_tx <= bitcnt_tx + cntone;
when "0010" | "0011" | "0100" |
"0101" | "0110" | "0111" |
"1000" | "1001" =>
bitcnt_tx <= bitcnt_tx + cntone;
txd <= buff_tx(0);
buff_tx <= '1' & buff_tx(7 downto 1);
when "1010" => txd <= '1';
if (g < 11) then g <= g + 1;
bitcnt_tx <= "0001";
else
bitcnt_tx <= "1011";
g <= 1;
end if;
when "1011" => if (j < 1) then
if (del <= 0000) then
bitcnt_tx <= "1011";
del <= del + 1;
else
del <= 1;

69
j <= j + 1;
bitcnt_tx <= "0001";
end if;
else
j <= 1;
bitcnt_tx <= "1100";
end if;
when "1100" => bitcnt_tx <= "1100";
state_g <= s3;
when others => end case;
when s3 =>
if (del <= 30000) then
del <= del + 1;
else
bitcnt_rx <= "0000";
bitcnt_tx <= "0000";
disp_data_rx <= (others => (others => '0'));
ready_data_rx <= (others => (others => '0'));
buff_tx <= (others => '0');
shift <= (others => '0');
p1 <= 1;
g <= 1;
j <= 1;
del <= 1;
state_g <= s4;
end if;
when s4 =>
case bitcnt_tx is
when "0000" =>
led <= x"0d" ;
g <= 1;
j <= 1;
del <= 1;
bitcnt_tx <= bitcnt_tx + cntone;
when "0001" =>
buff_tx <= gsm_del(g);
----AT+CMGD=1,4.... all msg deleting

70
txd <= '0';
bitcnt_tx <= bitcnt_tx + cntone;
when "0010" | "0011" | "0100" |"0101" | "0110" | "0111" |
"1000" | "1001" => bitcnt_tx <= bitcnt_tx + cntone;
txd <= buff_tx(0);
buff_tx <= '1' & buff_tx(7 downto 1);
when "1010" =>
txd <= '1';
if (g < 13) then
g <= g + 1;
bitcnt_tx <= "0001";
else
g <= 1;
bitcnt_tx <= "1011";
end if;
when "1011" =>
if (j < 1) then
if (del <= 10000) then
bitcnt_tx <= "1011";
del <= del + 1;
else
del <= 1;
j <= j + 1;
bitcnt_tx <= "0001";
end if;
else
j <= 1;
bitcnt_tx <= "1100";
end if;
when "1100" => bitcnt_tx <= "1100";
state_g <= s5;
when others => end case;
when s5 =>
if (del <= 30000) then
del <= del + 1;
else
bitcnt_rx <= "0000";
bitcnt_tx <= "0000";

71
disp_data_rx <= (others => (others => '0'));
ready_data_rx <= (others => (others => '0'));
buff_tx <= (others => '0');
shift <= (others => '0');
p1 <= 1;
g <= 1;
j <= 1;
del <= 1;
state_g <= s6;
end if;
------------send msg at this time-----------
--+CMTI : "SM",1 receiving
when s6 =>
case bitcnt_rx is
when "0000" =>
led <= x"02" ;
if (RxD = '1') then -- Stop Bit
flag1<='1';
state_g<=s9;
bitcnt_tx<="0000";
else
flag1<='0';
bitcnt_rx <= bitcnt_rx + cntone;
end if;
when "0001" | "0010" | "0011" |
"0100" | "0101" | "0110" |
"0111" | "1000" =>
bitcnt_rx <= bitcnt_rx + cntone;
shift <= RxD & shift(7 downto 1);
when "1001" =>
if (RxD = '1') then
bitcnt_rx <= "1001";
else
if (p1 < 7) then
bitcnt_rx <= "0001";
p1 <= p1 + 1;
else
bitcnt_rx <= "1010";
p1 <= 1 ;

72
end if;
end if;
if (p1 < 7) then
ready_data_rx(p1) <= shift;
end if;
when "1010" =>
if ((ready_data_rx(3) = x"2b") and (ready_data_rx(4) = x"43") and (ready_data_rx(5) = x"4d") and
(ready_data_rx(6) = x"54")) then led <= x"03" ;
if (del <= 70000) then del <= del + 1;
bitcnt_rx <= "1010";
else
state_g <= s7;
bitcnt_tx <= "0000";
bitcnt_rx <= "0000";
shift<= (others => '0');
ready_data_rx <= (others => (others => '0'));
p1 <= 1;
end if;
else
led <= x"0f" ;
state_g <= s7;
p1 <= 1;
bitcnt_tx <= "0000";
ready_data_rx <= (others => (others => '0'));
end if;
when others =>
end case;
when s7 =>
----- AT+CMGR=1 sending
case bitcnt_tx is
when "0000" =>
led <= x"04" ;
g <= 1;
j <= 1;
del <= 1;
bitcnt_tx <= bitcnt_tx + cntone;
when "0001" =>
buff_tx <= gsm_cmd_id(g);
txd <= '0';

73
bitcnt_tx <= bitcnt_tx + cntone;
when "0010" | "0011" | "0100" | "0101" | "0110" | "0111" |
"1000" | "1001" => bitcnt_tx <= bitcnt_tx + cntone;
txd <= buff_tx(0);
buff_tx <= '1' & buff_tx(7 downto 1);
when "1010" =>
txd <= '1';
if (g < 11) then
g <= g + 1;
bitcnt_tx <= "0001";
else
g <= 1;
bitcnt_tx <= "1011";
end if;
when "1011" =>
if (j < 1) then
if (del <= 10000) then
bitcnt_tx <= "1011";
del <= del + 1;
else
del <= 1;
j <= j + 1;
bitcnt_tx <= "0001";
end if;
else
j<= 1;
bitcnt_tx <= "1100";
end if;
when "1100" =>
-- bitcnt_tx <= "1100";
led<=x"08";
bitcnt_rx<="0000";
when others =>
end case;
----- AT+CMGR=1 RECEIVING
case bitcnt_rx is
when "0000" => led<=x"07";
if (RxD = '1') then -- Stop Bit
bitcnt_rx <= "0000";
else
bitcnt_rx <= bitcnt_rx + cntone;
end if;

74
when "0001" | "0010" | "0011" |"0100" | "0101" | "0110" |
"0111" | "1000" => bitcnt_rx <= bitcnt_rx + cntone;
shift <= RxD & shift(7 downto 1);
when "1001" =>
if (p1 >=75) then
disp_data_rx(p1) <= shift;
end if;
if (p1 <78 ) then
p1 <= p1 + 1;
bitcnt_rx <= "0000";
else
p1 <= 1;
bitcnt_rx <= "1011";
end if;
when "1011" => if ((disp_data_rx(75) = x"4c") and (disp_data_rx(76) = x"6f") and
(disp_data_rx(77) = x"63") and (disp_data_rx(78) = x"74")) then led <= x"05" ;
-- motor on
ack <= '1';
else
ack <= '0';
led <= x"CC";
end if;
if (j < 1) then
if (del <= 50000) then
bitcnt_rx <= "1011";
del <= del + 1;
else
del <= 1;
j <= j + 1;
bitcnt_rx <= "0001";
end if;
else
j <= 1;
bitcnt_rx <= "1100";
end if;
when "1100" =>
bitcnt_rx <= "1100";
state_g <= s8;
when others => end case;

75
when s8 =>
if (del <= 30000) then
del <= del + 1;
else
bitcnt_rx <= "0000";
bitcnt_tx <= "0000";
disp_data_rx <= (others => (others => '0'));
ready_data_rx <= (others => (others => '0'));
buff_tx <= (others => '0');
shift <= (others => '0');
p1 <= 1;
g <= 1;
j <= 1;
del <= 1;
state_g <= s9;
end if;
when s9 =>
led <= x"06";
case bitcnt_tx is
when "0000" =>
if( ack= '1') then
flag1 <='0';
bitcnt_tx <="0001";
elsif (flag_enable ='1') then
flag1 <='0';
bitcnt_tx <="0001";
else
if( flag1 ='0') then
state_g <= s11;
del<=1;
else
state_g<=s6;
bitcnt_rx <= "0000";
end if;
end if;
when "0001" =>
buff_tx <= gsm_msg(g);

76
txd <= '0';
bitcnt_tx <= bitcnt_tx + cntone;
when "0010" | "0011" | "0100" | "0101" | "0110" | "0111" |
"1000" | "1001" => bitcnt_tx <= bitcnt_tx + cntone;
txd <= buff_tx(0);
buff_tx <= '1' & buff_tx(7 downto 1);
when "1010" =>
txd <= '1';
if (g < 22) then
g <= g + 1;
bitcnt_tx <= "0001";
else
bitcnt_tx <= "1011";
g <= 1;
end if;
when "1011" =>
if (j < 1) then
if (del <= 50000) then
bitcnt_tx <= "1011";
del <= del + 1;
else
del <= 1;
j <= j + 1;
bitcnt_tx <= "0001";
end if;
else
j <= 1;
bitcnt_tx <= "1100";
end if;
when "1100" => bitcnt_tx <= "1100";
state_g <= s10;
when others => end case;
when s10=> case bitcnt_txx is
when "0000" =>
g <= 1;
j <= 1;
del <= 1;
bitcnt_txx <= bitcnt_txx + cntone;
when "0001"=>

77
if (ack='1') then
if (g = 17) then buff_tx <= l1;
elsif (g = 18) then buff_tx <= l2;
elsif (g = 20 ) then buff_tx <= l3;
elsif (g = 21) then buff_tx <= l4;
elsif (g = 23) then buff_tx <= l5;
elsif (g = 24) then buff_tx <= l6;
elsif (g = 35) then buff_tx <= data_d(1);
elsif (g = 36) then buff_tx <= data_d(2);
elsif (g = 38 ) then buff_tx <= data_d(3);
elsif (g = 39) then buff_tx <= data_d(4);
elsif (g = 41) then buff_tx <= data_d(5);
elsif (g = 42) then buff_tx <= data_d(6);
elsif (g = 54) then buff_tx <= data_lt(1);
elsif (g = 55) then buff_tx <= data_lt(2);
elsif (g = 56 ) then buff_tx <= data_lt(3);
elsif (g = 57) then buff_tx <= data_lt(4);
elsif (g = 58) then buff_tx <= data_lt(5);
elsif (g = 59) then buff_tx <= data_lt(6);
elsif (g = 60) then buff_tx <= data_lt(7);
elsif (g = 61) then buff_tx <= data_lt(8);
elsif (g = 62) then buff_tx <= data_lt(9);
elsif (g = 63) then buff_tx <= data_lt(10);
elsif (g = 74) then buff_tx <= data_lg(1);
elsif (g = 75) then buff_tx <= data_lg(2);
elsif (g = 76) then buff_tx <= data_lg(3);
elsif (g = 77) then buff_tx <= data_lg(4);
elsif (g = 78) then buff_tx <= data_lg(5);
elsif (g = 79) then buff_tx <= data_lg(6);
elsif (g = 80) then buff_tx <= data_lg(7);
elsif (g = 81) then buff_tx <= data_lg(8);
elsif (g = 82) then buff_tx <= data_lg(9);
elsif (g = 83) then buff_tx <= data_lg(10);
else
buff_tx <= state3_g1(g);
end if;
elsif( flag_enable ='1') then
if (g = 17) then buff_tx <= l1;

78
elsif (g = 18) then buff_tx <= l2;
elsif (g = 20 ) then buff_tx <= l3;
elsif (g = 21) then buff_tx <= l4;
elsif (g = 23) then buff_tx <= l5;
elsif (g = 24) then buff_tx <= l6;
elsif (g = 35) then buff_tx <= data_d(1);
elsif (g = 36) then buff_tx <= data_d(2);
elsif (g = 38 ) then buff_tx <= data_d(3);
elsif (g = 39) then buff_tx <= data_d(4);
elsif (g = 41) then buff_tx <= data_d(5);
elsif (g = 42) then buff_tx <= data_d(6);
elsif (g = 54) then buff_tx <= data_lt(1);
elsif (g = 55) then buff_tx <= data_lt(2);
elsif (g = 56 ) then buff_tx <= data_lt(3);
elsif (g = 57) then buff_tx <= data_lt(4);
elsif (g = 58) then buff_tx <= data_lt(5);
elsif (g = 59) then buff_tx <= data_lt(6);
elsif (g = 60) then buff_tx <= data_lt(7);
elsif (g = 61) then buff_tx <= data_lt(8);
elsif (g = 62) then buff_tx <= data_lt(9);
elsif (g = 63) then buff_tx <= data_lt(10);
elsif (g = 74) then buff_tx <= data_lg(1);
elsif (g = 75) then buff_tx <= data_lg(2);
elsif (g = 76) then buff_tx <= data_lg(3);
elsif (g = 77) then buff_tx <= data_lg(4);
elsif (g = 78) then buff_tx <= data_lg(5);
elsif (g = 79) then buff_tx <= data_lg(6);
elsif (g = 80) then buff_tx <= data_lg(7);
elsif (g = 81) then buff_tx <= data_lg(8);
elsif (g = 82) then buff_tx <= data_lg(9);
elsif (g = 83) then buff_tx <= data_lg(10);
else
buff_tx <= state3_g(g);
end if;
end if;
bitcnt_txx <= bitcnt_txx + cntone;
when "0010" =>
TxD <= '0';
bitcnt_txx <= bitcnt_txx + cntone;

79
when "0011" | "0100" | "0101" |
"0110" | "0111" | "1000" |
"1001" | "1010" =>
bitcnt_txx <= bitcnt_txx + cntone;
TxD <= buff_tx(0);
buff_tx <= buff_tx(0) & buff_tx(7 downto 1);
when "1011" =>
TxD <= '1';
bitcnt_txx <= bitcnt_txx + cntone;
when "1100" =>
if g <107 then
g <= g + 1;
bitcnt_txx <= "0001";
else
g<= 1;
bitcnt_txx <= "1101";
end if;
when "1101" =>
if (j < 1) then
if (del <= 50000) then
bitcnt_txx<= "1101";
del <= del + 1;
else
del <= 1;
j <= j + 1;
bitcnt_txx <= "0001";
end if;
else
j <= 1;
ack<='0';
bitcnt_txx <= "1110";
end if;
when "1110" => bitcnt_txx <= "1110";
state_g <= s11;
when others => end case;
when s11 =>
led <= x"f0";
if (del <= 80000) then
del <= del + 1;

80
else
bitcnt_tx <= "0000";
bitcnt_txx<="0000";
buff_tx <= (others => '0');
g <= 1;
j <= 1;
del <= 1;
state_g <= s0;
end if;
when others =>
end case;
end if;
end process;
-----------------------------------time convertion process-----------------------
process(clk)
begin
if clk'event and clk ='1' then
sig_f5<=sig_f5+1;
case sig_f5 (5 downto 0) is
when"000000" =>
t_1<= data_time(1)+0;
t_2<= data_time(2)+5;
t_3<= data_time(3)+3;
t_4<= data_time(4)+0;
t_5<= data_time(5)+0;
t_6<= data_time(6)+0;
sig_f5<="000001";
when "000001" => ----------seconds---------
if(t_6 >=x"30" and t_6<=x"39"
and t_5>=x"30" and t_5<=x"35") then
l6<=t_6;
l5<= t_5;
else
l6<=t_6;
l5<= t_5 -6;
t_4<= t_4+1;
end if;

81
sig_f5<="000010";
when "000010" =>
if(t_4>=x"30" and t_4<=x"39"
and t_3>=x"30" and t_3<=x"35") then
l4<=t_4;
l3<= t_3;
else
l4<= t_4;
l3<= t_3 -6;
t_2<= t_2+1;
end if;
sig_f5<="000011";
when "000011" =>
--
if(t_2>=x"30" and t_2<=x"39"
and t_1>=x"30" and t_1<=x"31") then
l2<=t_2;
l1<= t_1;
elsif( t_2>=x"30" and t_2<=x"39"
and t_1>=x"32") then
if( t_2>=x"30" and t_2<=x"33"
and t_1>=x"32") then
l2<=t_2;
l1<=t_1;
else
l2<=t_2-4;
l1<=t_1-2;
end if;
else
l2<=t_2-10;
l1<= t_1+1;
end if;
sig_f5<="000100";
when "000100" =>
if(time_delay <= 5000) then
time_delay <= time_delay+1;
sig_f5 <="000100";

82
else
time_delay <= 1;
sig_f5<="000000";
end if;
when others =>
end case;
end if;
end process;
end Behavioral;

83
CHAPTER 9
CONCLUSION
This version of our project will send a reply when we send a SMS and also sends the
position of the vehicle in terms of latitude and longitude when there is any accident. It doesn‘t tell the
exact nature of the accident, whether it is severe or just a mild one. With the help of accelerometer
sensor, we can tell the exact position of the vehicle. We can predict whether the vehicle is in normal
position or upside down.
This project can be enhanced in future by modifying in the program to find out the
actual position of the vehicle and also in accident prevention. This can also be enhanced by
automatically locking all the brakes in case of accident. In many accidents, it becomes severe as the
drivers lose control and can‘t stop the vehicle. During the accident, the accelerometer sensor will
triggered due to vibrations which is received and processed by the Spartan processor. The processor
should be connected to devices which can lock the brakes when triggered. By this enhancement, we
can stop the vehicle and can reduce the impact of the accident.
This can be used to prevent vehicle theft. In case of any theft, the owner can track the
location of the vehicle.
In public transport system, the implementation of this equipment will ease the people. When
public transport systems like bus, trains these are installed with this equipment, People can know the
location of the vehicle and arrive in the stop in time. Modifying the code, we can make it to send the
position of the vehicle periodically to a subscribed mobile number so that companies can keep an eye
on their vehicles.
Thus we can make use of the available technology to the benefit of the people by saving the
lives of the people and helping the owners of the vehicle to keep track of their vehicles.

84
REFERENCES
1. Adnan I. Yaqzan, Issam W. Damaj, and Rached N. Zantout (July 24, 2008),‘ GPS-
Based Vehicle Tracking System-On-Chip‘, Proceedings of the world Congress on
Engineering Vol I WCE
2. Arias Tanti Hapsari Eniman Y Syamsudin Imron Pramana (2005) ,‘ Design Of Vehicle
Position Tracking System Using Short Message Services And Its Implementation On
FPGA‘, Proceedings of the 2005 Asia and South Pacific Design Automation Conference,
ISBN:0-7803-8737-6
3. Peter J. Ashenden (1995) ,‘The designer's guide to VHDL‘, Morgan Kaufmann Publishers,
San Francisco
4. Theodore S. Rappaport (2008),‘Wireless Communication‘, Prentice Hall PTR
1. 2.
5. Vijay Kumar Garg, Joseph E. Wilkes (October 1998),‘Principles and Applications of GSM‘,
Prentice Hall PTR
6. Ziad A. Osman, Mazen Jrab, Souleiman Midani, Rached N. Zantout (May 2003),
‗Implementation of a System for Offline Tracking using GPS‘ ,Mediterranean Microwave
Symposium, Ain Shams University, Cairo,Egypt, pp. 203-207.