-
7/25/2019 Ident 001122
1/7
Practical Control Systems
System Identification I
Bart De Schutter & Robert Babuska
Web Page: Blackboard or http://www.dcsc.tudelft.nl/sc4070
Delft Center for Systems and Control
Delft University of Technology
Practical Control Systems pcs id.1
Outline of this lecture
1. Identification: General overview
models
time domain / frequency domain identification
2. System identification in the time domain
general case
identification of 1st order models identification of 2nd order
models
ARX, OE, and ARMAX models
Practical Control Systems pcs id.2
1. Identification: General overview
Models:
tailor-made
black-box
Tailor-made models(based on physical modeling):
d
dtx(t) = f(x(t),u(t),e(t),)
y(t) =h(x(t),u(t),e(t),)
Practical Control Systems pcs id.3
Black-box models:
1st order & 2nd order linear models (continuous-time):
G1(s) = 1
s+1G2(s) =
2
s2 +2s+2
linear models (ARX, OE, ARMAX, BJ discrete-time):
y(k) =G(q,)u(k) +H(q,)e(k)
nonlinear models (neural networks, fuzzy models, . . . )
Practical Control Systems pcs id.4
-
7/25/2019 Ident 001122
2/7
Box-Jenkins and Output-Error model
+
+
Output-Error (OE)
y(k) =B(q)
F(q)u(k) +e(k)
Box-Jenkins (BJ)
y(k) =B(q)
F(q)u(k) +
C(q)
D(q)e(k)
u
u
e
e
y
yB
F
B
F
C
D
Practical Control Systems pcs id.5
ARMAX and ARX models
+
+
ARX
A(q)y(k) =B(q)u(k) +e(k)
ARMAX
A(q)y(k) =B(q)u(k) +C(q)e(k)u
u
e
e
y
y1
A
1
A
B
B
C
Practical Control Systems pcs id.6
Identification
Time domain
Frequency domain (yields transfer functionG, for linear
systems)
frequency analysis (sines as input signal)
Fourier analysis (arbitrary input signals)
spectral analysis (signal spectraG)
We concentrate onidentification in the time domain.
Practical Control Systems pcs id.7
References
L. Ljung,System Identification: Theory for the User, 2nd
edition,
Prentice-Hall, 1999
L. Ljung,System Identification, Chapter 58 of theControl
Engineering
Handbook, pp. 10331054, CRC Press, 1996
K.J. Astrom & B. Wittenmark,Computer-Controlled Systems,
Prentice-Hall, 1997, Chapter 13
Lecture notes of the courses Filtering & identification
(SC4040) or
System identification (SC4110)
Manual of MATLAB System Identification Toolbox
Practical Control Systems pcs id.8
-
7/25/2019 Ident 001122
3/7
2. Identification in the time domain
Overview:
General case
Identification of 1st order models
Identification of 2nd order models
ARX, OE, and ARMAX models
Practical Control Systems pcs id.9
General case (nonlinear)
Model:
d
dtx(t) = f(x(t),u(t),e(t),)y(t) =h(x(t),u(t),e(t),)
Optimal value of?
Model,prediction of output y(tk|)att= tk=kh
Prediction error: (k,) =y(tk)y(tk|)
Performance:
JN() = 1
N
N
k=1
g((k,))
withN: # data points
Practical Control Systems pcs id.10
General case (continued)
Performance:
JN() = 1
N
N
k=1
g((k,))
Usually:g() =2
Note: g() =log fe() with fe probability density function of
noisee
maximum likelihood estimate
Optimal value:
N=argmin
JN()
Practical Control Systems pcs id.11
General case (continued)
d
dtx(t) = f(x(t),u(t),e(t),)
y(t) =h(x(t),u(t),e(t),)
Optimal value of:
N= argmin
1
N
N
k=1
2(k,)
In general: use numerical, nonlinear optimization algorithms to
compute N
(see course Optimization in Systems and Control (SC4090))
Matlab optimization toolbox (lsqnonlin)
Matlab NCD toolbox (nonlinear control design)
Practical Control Systems pcs id.12
-
7/25/2019 Ident 001122
4/7
Nonlinear least squares
f() =N
i=12i() =()
T() f() =2()T()
H() =2()T() +N
i=1
22i()i()
Approximation of the Hessian:
H():=2()T()
Gauss-Newton method: k+1=k H1(k)f(k)
Levenberg-Marquardt method: k+1=kI+ H(k)
1
f(k)
Practical Control Systems pcs id.13
lsqnonlin
Syntax: x=lsqnonlin(fun,x0,lb,ub,options) with
fun : m-file function returninge and its
Jacobiane(optional)[e,J]=fun(x)
e=...
% Compute Jacobian if required.
if ( nargout > 1 )
J=...
end;
x0 : initial starting point
lb, ub : lower and upper bounds for x (optional)
options : options structure (optional)
Practical Control Systems pcs id.14
Most important options:
LargeScale : use a large-scale algorithm (on) or
medium-scale
algorithm (off).
Display : controls display of (intermediate) values. Possible
values:
off, iter, and final
Jacobian : indicates whether Jacobian is defined by user
MaxIter : maximum number of iterations allowed
TolFun, TolX : termination tolerance on the function value and
on x
LevenbergMarquardt : Choose Levenberg-Marquardt over
Gauss-Newton algorithm (default: on)
Practical Control Systems pcs id.15
Example of lsqnonlin
Note: Illustrative example, not related to identification
minx
eTe with e(x) =
10(x2x
2
1) (1x1)
T
Define m-file:
function [e,J]=fun_rosenbrock_e(x)
e=[10*(x(2)-x(1)2) (1-x(1))];
if ( nargout > 1 )
J=[-20*x(1) -1;
10 0];
end;
Practical Control Systems pcs id.16
-
7/25/2019 Ident 001122
5/7
Perform optimization:
x0=[2 2];
% Select medium-scale, Gauss-Newton, and
% Jacobian provided by user
options=optimset(LargeScale,off,...
LevenbergMarquardt,off,...
Jacobian,on);
x=lsqnonlin(fun_rosenbrock_e,x0,[],[],options)
Practical Control Systems pcs id.17
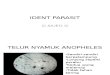
Identification of 1st order models
step response
y(t)K(1 exp((tL)/))
y
tL
slope =K/
0.63K
K
Practical Control Systems pcs id.18
2nd order models
0
0
a1
a2
t t +T
y0
y
envelopeet
=2
T
= 1
2lna1
a2
Practical Control Systems pcs id.19
ARX, OE, and ARMAX models
Model:
y(k) =G(q,)u(k) +H(q,)e(k)
withe zero-mean white noise sequence
Optimal one-step ahead prediction:
Given{u(k)}N1k=1
,{y(k)}N1k=1
and model(G(q,),H(q,)), determine
bestestimate ofy(k): y(k,|k1)
Prediction error:(k,) =y(k)y(k,|k1)
Practical Control Systems pcs id.20
-
7/25/2019 Ident 001122
6/7
Prediction error
OE: y(k) =G(q,)u(k) +e(k)
y(k,|k1) =G(q,)u(k), (k,) =y(k)G(q,)u(k)
ARX: A(q)y(k) =B(q)u(k) +e(k)
y(k) =a1y(k1) anay(kna)
+b0u(kL) + +bnbu(kLnb) +e(k)
y(k,|k1) =a1y(k1) +bnbu(kLnb)
(k,) =y(k) +a1y(k1) + +anay(kna)
b0u(kL) bnbu(kLnb)
linearin parametersai,bi!
Practical Control Systems pcs id.21
Solving optimization analytically?
Necessary condition for minimum ofJN():
JN() =0
When(k,)is linear in parameter vector(ARX!):
(k,) =y(k)(k)T
necessary condition becomes:
JN() =
1
N
N
k=1
2 (k,)(k,)
= 1
N
N
k=1
2(k)y(k)(k)T
=0
Practical Control Systems pcs id.22
These are well-known Normal Equations:
N
k=1
(k)y(k) = Nk=1
(k)(k)T
solve linear equation to obtain
Practical Control Systems pcs id.23
Nonlinear versus linear models
Nonlinear models
+ general
+ based on physical models
+ relation with physical system
- nonlinear optimization local minima, time-consuming
Practical Control Systems pcs id.24
-
7/25/2019 Ident 001122
7/7
Linear models
+ often very effective
+ intuitive behavior (in particular for 1st & 2nd order
models)
+ identification is fast process
+ many control design methods for linear models
- black-boxrelation with physical system?
- linear not general
Practical Control Systems pcs id.25
![1 ÎÁÙÈÅ ÑÂÅÄÅÍÈß Î GAP - Dr. Alexander Konovalov2.14 ФУНКЦИИ Формат: function ( [ arg-ident {, arg-ident} ] ) [ local loc-ident {, loc-ident} ; ] statements](https://img.pdfslide.net/doc/110x75/6123a12597bd3f22434f6d2a/1-gap-dr-alexander-konovalov-214-.jpg)