Embed Size (px)
Citation preview
![Page 1: [IEEE 2009 WRI Global Congress on Intelligent Systems - Xiamen, China (2009.05.19-2009.05.21)] 2009 WRI Global Congress on Intelligent Systems - Second Order Spiking Perceptron](https://reader036.pdfslide.net/reader036/viewer/2022092702/5750a6221a28abcf0cb73907/html5/thumbnails/1.jpg)
Second Order Spiking Perceptron
Xuyan XiangHunan University of Arts and Science
College of Mathematics and Computing ScienceChangde, China
Yingchun DengXiangqun Yang
Hunan Normal UniversityCollege of Mathematics and Computer Science
Changsha, China
Abstract
According to the usual approximation scheme, wepresent a more biologically plausible so-called Second Or-der Spiking Perceptron with renewal process inputs, whichemploys both first and second statistics, i.e. the means, vari-ances and correlations of the synaptic input. We show thatsuch perceptron, even a single neuron, is able to performcomplex non-linear tasks like the XOR problem, which isimpossible to be solved by traditional single-layer percep-trons. Here such perceptron offers a significant advantageover classical models, in that it includes the second orderstatistics in computations, and that it introduces variance inthe error representation. We are to open up the possibility ofcarrying out a random computation in neuronal networks.
1. Introduction
Recently, computational neural models exists, owe moreto their biological counterparts than their predecessors. Itshows that renewal process inputs represent a more accu-rate approximation of synaptic inputs. However, given thedifficulties in dealing analytically with a system whose in-puts are of renewal form, suitable continuous approxima-tions are required. Therefore in [7], Tuckwell shows thatrenewal processes can be approximated using diffusion ap-proximation. Feng in [3] further develops a more accurateusual approximation scheme (UAS).
In addition, it has emerged that the spike activity of aneuron is decided not only by the mean rate, but also byhigher order statistics of its input [2, 5]. The questionthen arises of whether it is possible to develop a frame-work of neural computation which includes not only the first(means) but the second (fluctuations, correlations) and pos-sibly higher-order statistics of firing. In this letter we willdemonstrate that this is indeed possible.
According to the above UAS, we will present a morebiologically plausible so-called Second Order Spiking Per-
ceptron (SOSP) based on IF model with renewal processinputs, which employ both first and second statistical repre-sentation, i.e. the means, variances and correlations of thesynaptic input. We will show that such perceptron, even asingle neuron, can successfully perform complicated non-linear task like the XOR problem, which is impossible to besolved by traditional single-layer perceptrons.
Here such perceptron offers a significant advantage overclassical models, in that it includes the second order statis-tics in computations, and that it introduces variance in theerror representation.
This paper is organized as follows. We first lay thefoundation of the second order spiking networks frameworkbased on the UAS in Sec. 2. Then we apply an error mini-mization technique to train the network and derive the cor-responding learning rule in Sec. 3. Finally we demonstratetheir applications in Sec. 4.
2. The Second Order Spiking Network
We begin by considering the IF model [7] as follows.Suppose the i-th neuron in the k + 1-th layer receives exci-tatory postsynaptic potentials (EPSPs) and inhibitory post-synaptic potentials (IPSPs). When the membrane potentialV k+1
i (t) is between its resting state Vr and its threshold Vt,it satisfies the following dynamics:
dV k+1i (t) = −L(V k+1
i (t) − Vr)dt + dIk+1i,syn(t) (1)
where L is the decay rate, Ik+1i,syn(t) is the synaptic input
dIk+1i,syn(t) =
pk∑j=1
ωE,kij dNE,k
j (t) −qk∑
j=1
ωI,kij dNI,k
j (t) (2)
Here ωE,kij is the magnitude of EPSPs, NE,k
i renewal pro-cess arriving from the i-th and j-th synapse (the superscript’I’ for IPSPs), pk and qk are the total number of activeexcitatory and inhibitory synapses in the k-th layer. OnceV k+1
i (t) is greater than or equal to Vt, it is reset to Vr.
Global Congress on Intelligent Systems
978-0-7695-3571-5/09 $25.00 © 2009 IEEE
DOI 10.1109/GCIS.2009.376
155
![Page 2: [IEEE 2009 WRI Global Congress on Intelligent Systems - Xiamen, China (2009.05.19-2009.05.21)] 2009 WRI Global Congress on Intelligent Systems - Second Order Spiking Perceptron](https://reader036.pdfslide.net/reader036/viewer/2022092702/5750a6221a28abcf0cb73907/html5/thumbnails/2.jpg)
Based on the usual approximation scheme (UAS) [3], theequation (2) can be approximated as
dIk+1i,syn(t) ≡ μk
i dt + σki dB(t) (3)
where
μki =
pk∑j=1
ωkijμ
kj (1 − r)
(σk
i
)2= (1 + r2)
pk∑j=1
ωkijσ
kj
(ωk
ijσkj + ρ
pk∑n�=j,n=1
ωkinσk
n
)(4)
with
μki =
1T k
i + Tref, (σk
i )2 =TT k
i
(T ki )3
T k+1i =
2L
∫ Aki (Vt)
Aki(Vr)
g(x)dx,
TT k+1i =
4L2
∫ Aki (Vt)
Aki(Vr)
a(x)dx,
(5)
Aki (y) =
yL − μki
σki
√L
g(x) = exp (x2)∫ x
−∞exp (−u2)du
a(x) = exp (x2)∫ x
−∞exp (−u2)g2(u)du
(6)
Furthermore, the means and variance of the output in(n + 1)-th layer can be written as follows:
μn+1i =
1Tn+1
i + Tref
≡ fn+1i ≡ fn+1
i (μnj , σn
j )
(σn+1
i
)2=
TTn+1i
(Tn+1i )3
≡ gn+1i ≡ gn+1
i (μnj , σn
j ).(7)
The above relationship between inputs and outputs lays thefoundation of the Second Order Spiking Network (SOSN).
We now confine ourselves to feed-forward networks, al-though the results presented below can be easily general-ized to feedback and recurrent networks. Here we consideran output layer (label number l + 1) of h = 1, · · · , P neu-rons; l − 1 hidden layers (label number i = 2, · · · , l) withj = 1, · · · ,M i neurons on each layer; and an input layer(label number 1) with j = 1, · · · , N input units.
3. A Learning Rule of SOSN
For the purpose of this definition we assume the outputunits are themselves second order spiking neurons, thoughthis need not be the case. The learning algorithm we used
seeks to minimize the error between the actual network out-put and the desired target output response patterns. Wetherefore define the error function as follows:
E =12
P∑h=1
(μl+1
h − dh
)2+ γ
P∑h=1
(σl+1
h
)2(8)
where μl+1h and σl+1
h are the mean and variance at outputneuron h, as defined above in (7), dh is the desired targetresponse of output neuron i and γ is a penalty factor.
The learning rule can be written as follows:
Δωmij = −η
∂ E
∂ωmij
, m = 1, · · · , l. (9)
where η is the learning rate.
3.1. The Output Layer
Let hnh ≡√gn
h for n = 1, 2, · · · , l + 1, and replace μl+1h
and σl+1h in (8) by f l+1
h and gl+1h in (7), then we get
∂E
∂ωlhi
=∂E
∂f l+1h
∂f l+1h
∂T l+1h
∂T l+1h
∂ωlhi
+γ
(∂gl+1
h
∂T l+1h
∂T l+1h
∂ωlhi
+∂gl+1
h
∂TT l+1h
∂TT l+1h
∂ωlhi
)
≡ δ1h∂T l+1
h
∂ωlhi
+ δ2h∂TT l+1
h
∂ωlhi
.
(10)Where
δ1h =∂E
∂f l+1h
∂f l+1h
∂T l+1h
+γ∂gl+1
h
∂T l+1h
, δ2h = γ∂gl+1
h
∂TT l+1h
(11)
Furthermore,
∂E
∂f l+1h
= f l+1h − dh,
∂f l+1h
∂T l+1h
=−1
(T l+1h + Tref )2
,
∂gl+1h
∂T l+1h
= −3TT l+1h
(T l+1h )4
,∂gl+1
h
∂TT l+1h
=1
(T l+1h )3
,
∂T l+1h
∂ωlhi
=2L
g(Al
h(y)) ∂Al
h(y)∂ωl
hi
∣∣∣y=Vt
y=Vr,
∂TT l+1h
∂ωlhi
=4L2
a(Al
h(y)) ∂Al
h(y)∂ωl
hi
∣∣∣y=Vt
y=Vr,
∂Alh(y)
∂ωlhi
=− ∂μl
h
∂ωlhi
σlh − (yL − μl
h
) ∂σlh
∂ωlhi(
σlh
)2 √L
,
∂μlh
∂ωlhi
= f li (1 − r),
∂σlh
∂ωlhi
=
2ωlhig
li + ρhl
i
M l∑n�=i,n=1
ωlinhl
n
2σlh
(1 + r2
)
(12)
156
![Page 3: [IEEE 2009 WRI Global Congress on Intelligent Systems - Xiamen, China (2009.05.19-2009.05.21)] 2009 WRI Global Congress on Intelligent Systems - Second Order Spiking Perceptron](https://reader036.pdfslide.net/reader036/viewer/2022092702/5750a6221a28abcf0cb73907/html5/thumbnails/3.jpg)
3.2. The Hidden Layers
For the hidden layer neurons we can write the chain rule:
∂E
∂ωl−1ij
=∂E
∂f li
∂f li
∂ωl−1ij
+∂E
∂hli
∂hli
∂ωl−1ij
=
P∑h=1
δ1i∂T l+1
h
∂f li
∂f li
∂T li
∂T li
∂ωl−1ij
+
P∑h=1
δ2i1
2hli
·∂TT l+1h
∂hli
(∂gl
i
∂T li
∂T li
∂ωl−1ij
+∂gl
i
∂TT li
∂TT li
∂ωl−1ij
)
≡ δl1i
∂T li
∂ωl−1ij
+ δl2i
∂TT li
∂ωl−1ij
.
(13)
Where
δl1i =
P∑h=1
δ1h∂T l+1
h
∂f li
∂f li
∂T li
+P∑
h=1
δ2h∂TT l+1
h
∂hli
12hl
i
∂gli
∂T li
,
δl2i =
P∑h=1
δ2h∂TT l+1
h
∂hli
12hl
i
∂gli
∂TT li
.
(14)
and∂f l
i
∂T li
,∂gl
i
∂T li
,∂gl
i
∂TT li
can be calculated with the induction
according to Eq.(12).Furthermore, by (5-6), we get
∂T l+1h
∂f li
=2L
g(Al
h(y)) ∂Al
h(y)∂f l
i
∣∣∣y=Vt
y=Vr
∂TT l+1h
∂hli
=4L2
a(Al
h(y)) ∂Al
h(y)∂hl
i
∣∣∣y=Vt
y=Vr
∂Alh(y)
∂f li
= −∂μlh
∂f li
· 1σl
h
√L
,
∂Alh(y)
∂hli
=− (y · L − μl
h
)(σl
h
)2 √L
· ∂σlh
∂hli
.
(15)
Finally, by (6),
∂μlh
∂f li
= ωlhi(1 − r),
∂σlh
∂hli
=
hliω
lhi + ρ
M l∑n�=i,n=1
ωlhnhl
n
2σlh
ωlhi
(1 + r2
) (16)
So we can give a general δ rule for any hidden layer:(i). For layer l connected to output layer l + 1,
δl1i =
∂f li
∂T li
P∑h=1
δ1h∂T l+1
h
∂f li
+1
2hli
∂gli
∂T li
P∑h=1
δ2h∂TT l+1
h
∂hli
δl2i =
12hl
i
∂gli
∂TT li
P∑h=1
δ2h∂TT l+1
h
∂hli
.
(17)
(ii). For all other hidden layers,
δl−11i =
∂f l−1i
∂T l−1i
M l∑h=1
δl−11h
∂T lh
∂f l−1i
+1
2hl−1i
∂gl−1i
∂T l−1i
M l∑h=1
δl−12h
∂TT lh
∂hl−1i
,
δl−12i =
12hl−1
i
∂gl−1i
∂TT l−1i
M l∑h=1
δl−12h
∂TT lh
∂hl−1i
.
(18)
Thus the weight correction for the hidden layers is
Δmij = −η
(δm+11i
∂Tm+1i
∂ωmij
+ δm+12i
∂TTm+1i
∂ωmij
)(19)
where m = 1, · · · , l − 1.A SOSN combined with the above learning rule was
termed a Second Order Spiking Perceptron (SOSP).
4. Applications
For all simulations in this letter, the decay rate, thresholdand resting potential are set equal to L = 0.05, Vt = 20mV, and Vr = 0 mV respectively.
4.1. Decision Boundary I
In the experiments shown here a single neuron with twoweights inputs and initial CV = 1 was tested. Where CVis the abbreviation of the coefficient of variation of the ISIs,
CV =√
TT(T )2 . In simulations, the initial value of CV is
used to initialize the variance of ISIs.
Varying from the ratio r between excitatory and in-hibitory inputs. To exhibit the output decision boundary(ODB) varying from the ratio r, we first choose an approx-imate correlation coefficients ρ = 0.2 as previous experi-mental research in [4] has shown and fixed unitary value ofweights.
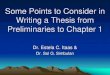
Figures 1 to 3 show the contour plots (left panels) andsurface planes (right panels) of ODB - shown here for inputpairs in the range (-2, -2) to (2, 2) - for 3 different cases: r =1, r = 0.5 and r = 2. For instance, Fig. 1 shows that forthe case r = 1, i.e. a neuron receiving balanced excitatoryand inhibitory inputs, the ODB is a ’quasi-lozenge’.
It is shown that the ratio between excitation and inhibi-tion input is able to change the ODB. The comparison of thefour (ratio) perceptron models, however, highlight the roleplayed by inhibition in information transmission. In fact,this appears to have a more sophisticated role in spikingnetworks than the dampening effect it exhibits in classicalmodelling.
157
![Page 4: [IEEE 2009 WRI Global Congress on Intelligent Systems - Xiamen, China (2009.05.19-2009.05.21)] 2009 WRI Global Congress on Intelligent Systems - Second Order Spiking Perceptron](https://reader036.pdfslide.net/reader036/viewer/2022092702/5750a6221a28abcf0cb73907/html5/thumbnails/4.jpg)
Input1
Inpu
t2
THE 2−D PLOT OF DECISION BOUNDARY
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=1, ρ=0.2
−2−1
01
2
−2
−1
0
1
20
10
20
30
40
50
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=1, ρ=0.2
Figure 1. The ODB for the case r = 1.
Input1
Inpu
t2
THE 2−D PLOT OF DECISION BOUNDARY
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=0.5, ρ=0.2
−2−1
01
2
−2
−1
0
1
20
10
20
30
40
50
60
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=0.5, ρ=0.2
Figure 2. The ODB for the case r = 0.5.
Input1
Inpu
t2
THE 2−D PLOT OF DECISION BOUNDARY
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=2, ρ=0.2
−2−1
01
2
−2
−1
0
1
20
20
40
60
80
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=2, ρ=0.2
Figure 3. The ODB for the case r = 2.
Input1
Inpu
t2
THE 2−D PLOT OF DECISION BOUNDARY
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=1, ρ=−0.5
Input1
Inpu
t2
THE 2−D PLOT OF DECISION BOUNDARY
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=1, ρ=−0.2
Figure 4. The contour plots of ODB for thecase r = 1, ρ = −0.5 and r = 1, ρ = −0.2.
Input1
Inpu
t2
THE 2−D PLOT OF DECISION BOUNDARY
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=1, ρ=0
Input1
Inpu
t2
THE 2−D PLOT OF DECISION BOUNDARY
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=1, ρ=0.5
Figure 5. The contour plots of ODB for thecase r = 1, ρ = 0 and r = 1, ρ = 0.5.
Varying from the correlation coefficients ρ. To illus-trate the effect of input correlations on the system’s output,we then run a series of simulations for the case r = 1 byvarying the input correlation coefficient ρ. Figures 4-5 (in-cluding Fig. 1) show the ODB for ρ ranging from -0.5 to0.5. It is apparent that various types of non-linear ODB canbe reached by adjusting the input correlation coefficient ρ.More details, the ODB is quadrate when ρ = 0, some othersare more and more contractive with the increasing of ρ (seethe left of Fig. 1 and Fig. 5), while the others are more andmore outstretched with the decreasing of ρ (see the left ofFig. 5 and Fig. 4). For instance, the contour plot of the ODBwith ρ = −0.5 resembles a ’flower’, and that of ρ = 0.5seems like a ’star’. Therefore we can perform various dif-ferent non-linear tasks by adjusting the input correlation co-efficient. More details, the correlation coefficients changesthe scale of the boundary, and the output is monotone in-creasing with respect to the correlation coefficients. It canbe interpreted that a neuron with a mean input was morelikely to fire when there were fluctuations about this meanand while the correlated inputs increased these fluctuations.
In conclusion, our perceptrons can produce various com-plicated non-linear output decision boundaries. More im-portant, the ratio r and correlation coefficients ρ seem playthe roles of ’shape’ and ’scale’ parameters, respectively.
4.2. XOR Problem
We consider to solve the XOR problem for SOSP withCV = 1. The model with r = 1 and ρ = 0.2 was testedusing polar coordinate input pairs: (-1, 0), (1, 0), (0, 1) and(0, -1). During the training cycle the weights were adjustedusing the algorithm introduced in Sec. 3. The left plot ofFig. 6 shows the ODB changing over the input space (-2,-2) to (2, 2) during training process. Prior to training theweights were given unitary values and a learning rate ofη = 0.0003 was set. The contour plot shows how the ODBchanges at each iteration in the training cycle. The right plotof Fig. 6 shows the final surface plane after training. The fi-nal ODB clearly encompassed the input pair (-1, 0) and (1,0), effectively classifying the XOR input with a single neu-ron. However it is impossible to be solved by traditionalsingle-layer perceptron.
4.3. Decision Boundary II
The models presented above are merely single neuronsand a progression would be to examine some of the proper-ties of a multilayer network.
Without loss of generality, we only discuss the Multi-layer SOSP with 1 hidden layer. Here simulations are basedon the unitary values of weights. They could be provided byvarying on the ratio as well as the correlation coefficients
158
![Page 5: [IEEE 2009 WRI Global Congress on Intelligent Systems - Xiamen, China (2009.05.19-2009.05.21)] 2009 WRI Global Congress on Intelligent Systems - Second Order Spiking Perceptron](https://reader036.pdfslide.net/reader036/viewer/2022092702/5750a6221a28abcf0cb73907/html5/thumbnails/5.jpg)
Input1
Inpu
t2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2r=1, ρ=0.2
The initial decision boundary
The final decision boundary
−2−1
01
2
−2
−1
0
1
20
20
40
60
80
Input1
THE FINAL DECISION BOUNDARY
Input2
Out
put
r=1, ρ=0.2
Figure 6. The ODB for a SOSP trained on theXOR problem with CV = 1, r = 1.
−2−1
01
2
−2
−1
0
1
20
20
40
60
80
100
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=0.5 0, ρ=0.2 0.2
−2−1
01
2
−2
−1
0
1
20
5
10
15
20
25
30
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=1 2, ρ=0.2 0.2
Figure 7. The ODB for r = 0.5 0, ρ = 0.2 0.2 andr = 1 2, ρ = 0.2 0.2.
on each layer. Some of them, for instance, were exhib-ited in Figures. 7- 9. Where Fig. 7 shows the ODB withr = 0.5, ρ = 0.2 on the first layer and r = 0, ρ = 0.2 onthe second layer.
It is not difficult to know that the networks with two lay-ers can produce more complicated ODB because it couldbe accomplished by the adjustment of the ratios r and thecorrelation coefficients ρ. Moreover the decision boundarymay be more and more complicated with the increasing ofnetwork layers. Here we omitted the corresponding detailsfor the simplicity. We can draw a general conclusion fromabove that the non-linear tasks that can be performed bymultilayer SOSP will more complicated and various thanthat by single-layer SOSP.
−2−1
01
2
−2
−1
0
1
20
50
100
150
200
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=2 0, ρ=0.2 0.2
−2−1
01
2
−2
−1
0
1
20
10
20
30
40
50
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=0 2, ρ=0.2 0.2
Figure 8. The ODB for r = 2 0, ρ = 0.2 0.2 andr = 0 2, ρ = 0.2 0.2.
−2−1
01
2
−2
−1
0
1
20
50
100
150
200
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=0 0, ρ=0.5 −0.9
−2−1
01
2
−2
−1
0
1
20
50
100
150
200
Input1
THE 3−D PLOT OF DECISION BOUNDARY
Input2
Out
put
r=0 0, ρ=−0.9 1
Figure 9. The ODB for r = 0 0, ρ = 0.5 − 0.9and r = 0 0, ρ = −0.9 1.
5. Discussions
It is obvious that the total error is composed of the meanerror and the variance error. During the training, not onlythe mean but the variance can be trained. It is thereforenatural to ask whether both of them can reach the desiredtolerance simultaneously, whether the variance error can beminimized when the mean error has reached the desired tol-erance, whether we can easily achieve the trade-off betweenthe mean and variance error by the adjustment of the penaltyfor a certain learning task, and so on. We will explore it inour further publications.
Acknowledgments
The work was supported by National Natural ScienceFoundation of China (10571051) and Scientific ResearchFund of Hunan Provincial Education Department (08C588).
References
[1] J. F. Feng, Computational Neuroscience-A ComprehensiveApproach. CRC Press, Chapman-Hall (2003).
[2] J. F. Feng, D. Brown, Impact of correlated inputs on the out-put of the integrate-and-fire models, Neural Computation, 12:671-692 (2000).
[3] J. F. Feng , Y. C. Deng and E. Rossoni, Dynamics of momentneuronal networks. Phys. Rev. E., 73: 041906 (2006)
[4] P. B. C. Matthews, Relationship of firing intervals ofhuman motor units to the trajectory of post-spike after-hyperpolarization and synaptic noise, Journal of Physiology,492: 596-628 (1996).
[5] E. Salinas and T. J. Sejnowski, Correlated neuronal activityand the flow of neural information, Nat Rev Neurosci, 2: 539-550 (2001).
[6] R. Stein, Some models of neuronal variability, Journal of Bio-physics, 7: 37-68 (1967).
[7] H. C. Tuckwell, Introduction to Theoretical Neurobiology.Cambridge University Press, Cambridge (1988).
[8] X. Y. Xiang, Y. C. Deng and X. Q. Yang, Spike-rate per-ceptrons. Proceedings of Fourth International Conference onNatural Computation 3: 326-333 (2008).
159