Embed Size (px)
Citation preview
![Page 1: [IEEE 2010 IEEE ANDESCON - Bogota, Colombia (2010.09.15-2010.09.17)] 2010 IEEE ANDESCON - Tests of hybrid Volterra-type models through NMPC schemes at a batch reactor](https://reader037.pdfslide.net/reader037/viewer/2022092816/5750a7d51a28abcf0cc40466/html5/thumbnails/1.jpg)
Tests of Hybrid Volterra-Type Models Through
NMPC Schemes at a Batch Reactor
Carlos Medina-Ramos and Huber Nieto-Chaupis
Centro de Tecnologıas de Informacion y Comunicaciones
Universidad Nacional de Ingenierıa
Lima - Peru
[email protected] - [email protected]
Abstract—A simulation of the control of temperature in abatch reactor aimed to preparate melamine resin, is presented.In contrast to traditional techniques like PID by which the setpoint turns out to be of importance, a Nonlinear Model PredictiveControl (NMPC) by using the Volterra model together to theorthogonal polynomials might permit to control the referencetrajectory tracking of the internal temperature of the reactor.This work proposes a NMPC based on the second order hybridVolterra-type model containing only 6 parameters. It allowsto evaluate both advantages and disadvantages of the modelas to automate the temperature trajectory tracking from theinitial phase of the heating. From the results, interesting andfavorable prospects to automate the reactor are expected. It mightsuggest that the hybrid Volterra models are a key step towardscompact technologies containing newest NMPC schemes of highperformance.
I. INTRODUCTION
The searching of new schemes for manufacturing high
quality products has triggered diverse strategies of control
aimed to produce excellent quality products in a full according
to the standards and others global requirements. The control
engineering has proposed and developed solid mathematical
methodologies engaging the formalism to the phenomenology
of systems efficiently [1] . In fact, the robustness of the
mathematical model can be crucial for implementations in
control systems and to understand the phenomenology as well.
Let us to mention the Volterra formalism which has widely
been used for modeling nonlinear systems. Based on the clear
fact that for any system holds the I/O universal relation,
the associated master equation describing such system can be
written by the Volterra model as follows,
y(t) = V[χ(t)] =∞∑
m=1
Vm [χ(t)], (1)
where V is called the Volterra operator by acting on the input
signal given by χ(t). This operator is actually an infinite
composition of terms by which the nonlinear system can be
adequately described. In the practice, the order is truncated by
the integer number N . In reality, the effect of the truncated
Volterra operator on the input signal results in an adequate
model of approximation for [1],
V[χ(t)] =N∑
m=1
∫ b
a
...
∫ b
a
h(τ1, ..., τm)
τm∏τi=τ1
χ(t−τi)dτi, (2)
where the kernels h(τ1, ..., τm) are intrinsically ascribed to
the Volterra operator, whereas a and b denote the limits of
integration corresponding to the range of operation of the
system. Thus, (2) is expressed as a finite sum of processes
of convolution. In this report, we focused on the expansion de
Eq. 2 up to the second order which means that (2) is rewritten
as
V[χ(t)]ForN=2 =
∫ b
a
h(τ1)χ(t− τ1)dτ1
+
∫ b
a
∫ b
a
h(τ1, τ2)χ(t− τ1)χ(t− τ2)dτ1dτ2, (3)
that is called the second order truncated Volterra series. As
observed in previous works [2], the modeling by using pure
Volterra models becomes intractable because the huge number
of kernels. This point has been a topic of exhaust discussions
in literature [3]. Indeed, it has also been the reason of
reconfigurate the Eq. (1-2) to a one much more reasonable for
practical ends. Such reconfiguration has evaluated to use the
orthogonal polynomials as recently reported in order to reduce
the number of kernels leading to establish fluid algorithms to
be used in control system.
The goal of this report is that of applying the hybrid Volterra-
type model in control systems for preparation of melamine
resin of excellent quality. In this way, a simulation of the
control of trajectory (of heating) based on the hybrid Volterra
models containing orthogonal polynomials like Laguerre,
Chebyshev and Hermite is presented. The results have shown
that the scheme of hybrid models adjusts to solve the problem
of temperature trajectory tracking in a 3.5 tons batch reactor.
The reactor under study aims to produce melamine resin
of high quality, however a carefully monitoring of internal
temperature in reactor should be applied to defeat instabilities,
overshoots and random disturbances which might emerge as
consequence of the complex mixing of chemical compounds
and all those fluctuations coming from the heating source.
This paper is organized as follows: in second part the basics
of identification is presented, with a brief description of
the orthogonal polynomials. Third part describes the NMPC
scheme associated to the technology of Nonlinear Dynamics
Matrix Control (NDMC) introduced as a prospective proposal
in optimizing the control of the reference trajectory tracking
of the temperature. Finally, some conclusions regarding the
978-1-4244-6742-6/10/$26.00 ©2010 IEEE
![Page 2: [IEEE 2010 IEEE ANDESCON - Bogota, Colombia (2010.09.15-2010.09.17)] 2010 IEEE ANDESCON - Tests of hybrid Volterra-type models through NMPC schemes at a batch reactor](https://reader037.pdfslide.net/reader037/viewer/2022092816/5750a7d51a28abcf0cc40466/html5/thumbnails/2.jpg)
results of this work are listed.
II. SYSTEM IDENTIFICATION
We argued that the Volterra series as expressed in Eq. 2, can
be applied to identify the heating of the batch reactor under
study. Thus we propose the following:
• rewrite Eq. 2 in its discrete form;
• to expand the kernels onto orthogonal polynomials;
• to keep the diagonal terms of the full algorithm;
• to choose the family of polynomials to be used.
Respect to the former, this report has used up to three different
families of orthogonal polynomials: Laguerre, Chebishev and
Hermite. So that, we shall establish up to three algorithms
which might be incorporated in the control system.
A. The Second Order Discrete Volterra Algorithm
In praxis, one needs to digitalize Eq. 2 so that it is necessary
to rewrite it in a much more appropriated manner,
y(k) =
q∑p=1
h(p)χ(k − p) +
q∑p,m=1
h(p, m)χ(k − p)χ(k −m),
(4)
where it was assumed N=2. The terms denote the first and
second order Volterra model, respectively. For the sake of the
simplicity, q is the same in both first and second order. Indeed,
it is observed that the integer numbers p and m run over the
values allowed by the horizon determined by the range [1,q].
B. The Hybrid Volterra-type Model
An interesting scheme to reduce the number of kernels
in Eq. 4 is that of expanding the kernels onto orthogonal
polynomials as follows:
h(p) =
r∑j=1
CjΨj(p), (5)
h(p, m) =
r∑j=1
s∑l=1
Cj,lΨj(p)Ψl(m), (6)
where r and s denote the highest value of order of the
polynomials to be considered (it is helpful to mention that
the projections (5) and (6) are established in virtue of the
Rietz-Fisher theorem.
When Eq. 5 and Eq. 6 are inserted in Eq. 4 the resulting
algorithm reads
y(k) =
q∑p=1
r∑j=1
CjΨj(p)χ(k − p)
+
q∑p,m=1
r∑j=1
s∑l=1
Cj,lΨj(p)Ψl(m)χ(k − p)χ(k −m). (7)
The hypothesis in this work consists in keeping only those
diagonal elements of Eq. 7, which would be enough for
system identification. This assumption reduces drastically the
number of parameters. Finally, the model algorithm to be used
throughout this report can be written as follows:
y(k) =
q∑p=1
r∑j=1
CjΨj(p)χ(k − p)
+
q∑p=1
r∑j=1
CjjΨ2l (p)χ2(k − p). (8)
which is denominated the second order truncated hybrid
Volterra-type model.
C. The Candidates Orthogonal Polynomials
Below are listed those orthogonal polynomials to be used
in the algorithm of the truncated hybrid Volterra-model. To
this end, it is required that any orthogonal polynomial should
satisfy the orthogonality relation∫ W(t)PQ(t)PS(t)dt = δQS
where W (t) is called the weight function associated to the
orthogonal polynomial PQ.
1) The Generalized Laguerre Polynomials: As mentioned
in several references, the Laguerre polynomials have been used
in the identification of nonlinear systems due to the fact that
they adjust well to those special system which are free of
strong oscillations [5]. They are generated from
LQ(t) =√
2aeat
(Q− 1)!
dQ−1
dtQ−1(tQ−1e−2at) (9)
for 0 ≤ t < ∞. To note that Q an integer number by denoting
the order of the polynomials and a the Laguerre pole. The
Laguerre polynomials are orthogonal respect to the weight
function tae−t.
2) The Chebishev Polynomials: The first kind Chebyshev
polynomials can be expressed as
CQ(t) = cos(Qcos−1(t)) (10)
for −1 ≤ t ≤ 1. The Chebyshev functions are orthogonal
respect to the weight function (1 − t2)−1/2 by assuring the
orthogonality relation inside the range of validity.
3) The Hermite Polynomials: The generation of orthogonal
functions is given by the following relation
HQ(t) = (−1)Qet2 dQ
dtQ
[e−t2
], (11)
for −∞ < t < ∞. The H functions are orthogonal respect to
the weight function defined by e−t2 along the all values of t.
D. Model Parameters Identification
So far it has been explained the following: (a) the iden-
tification algorithm given by Eq. 8, and (b) the orthogonal
polynomials Eq. (9-11) by which one should evaluate their
performance in (8) for the temperature identification.
To identify completely the system it is needed to know so
well the system and therefore to design the input function
χ(k). In the present simulation we shall use a Pseudo Random
Multi Level (PRMS)[4] input which must have the property
of exciting permanently the system during a sampling time
of order of 6000 s. Even though such excitation should
![Page 3: [IEEE 2010 IEEE ANDESCON - Bogota, Colombia (2010.09.15-2010.09.17)] 2010 IEEE ANDESCON - Tests of hybrid Volterra-type models through NMPC schemes at a batch reactor](https://reader037.pdfslide.net/reader037/viewer/2022092816/5750a7d51a28abcf0cc40466/html5/thumbnails/3.jpg)
be permanent in order to guarantee a reasonable relation
signal/noise.
The next step is to provide a mechanism which should be
capable of extracting the Cj and Cjj parameters together to
their associated identification error e(k) = y(k)−y(k), where
y(k) becomes output data acquired from the plant, by effect
of the PRMS.
The Procedure: It is possible to write Eq. 8 in its matrix form.
In this way, [Y]T = [y(1), y(2), y(3), ..., y(r−2), y(r−1), y(r)]and [C]T = [C1, C2, C3, C11, C22, C33]. Thus one can express
Eq. 8 as
[Y(r)] = [Ψ(r)χ(r)][C(r)] = [A(r)][C(r)]. (12)
To be concrete, the extraction of the C parameters, is achieved
from the identification error e(r) = [Y(r)]−[Y(r)] = [Y(r)]−[A(r)][C(r)]. To note that r ∈ [6, P ], for the second order (the
six parameter model are derived from Eq. 8).
Therefore, the resulting matrix equation Eq. 12 can be written
in a much more compact form Y = Y(C) = A · C, so
to identify the entries of matrix C one should consider a cost
function whose purpose is that of minimizing the identification
error,
J(C) =(Y −Y
)2
= (Y −Y)T(Y −Y), (13)
through the operation dJdC=0. It is easy to demonstrate that
after a straightforward algebra C = (ATA)−1
ATY resulting
in the Moore-Penrose pseudo-inverse matrix. Consequently,
the C matrix is written in a much more explicit manner,
C(r) =[[A(Ψ(r)χ(r))]
TA [Ψ(r)χ(r)]
]−1
×A
T(Ψ(r)χ(r))Y(r). (14)
One can to note that the suitable applicability of the Moore-
Penrose equation C = (ATA)−1
ATY is manifested in Eq.
14.
E. Functionality of the Heating Mechanism
In Fig. 1 is depicted the functionality of the preparation
of melamine resin at the R01 reactor of PISOPAK PERU
S.A.C. Firstly, the mixer is set on in order to uniformize the
chemical ingredients. Consequently, a signal which is denoted
by χ(k) is applied. This input is applied inside the range 4/20
mA on the transducer I/P converting the current to a signal
3/15 psi. This pressure governs a three way pneumatic valve
whose role is that of controlling the flux of the diathermic oil
( 220 ±5 0C ) coming from a heater oil, as shown on the left
part of Fig. 1. The oil goes to the batch reactor and it is the
element responsible for heating the reactor. A PT100 is used
as a transducer element of the temperature in reactor Y (k) as
observed in right side of Fig. 1.
F. Results of the Identification
Resulting coefficients were obtained from the Moore-
Penrose extraction process including a bias which is the
nominal value of the environment temperature.
� �
IP
�������
���
������
��������
����������
����
������������ ��
�����
!"# "����$
���
%# &'�("#& ��
Fig. 1. Scheme of chemical plant at PISOPAK. To note that the input isdriven by the I/P transducer followed by a three way pneumatic valve whoserole is that of regulating the flow of oil to reactor.
The initial parameters to be used in the algorithm are listed
below
Grade of Model 2
Number of Polynomials 3
Polynomial Type Laguerre, Chebyshev
and Hermite
Sampling Period T 30 s.
Time constant 90 s.
System Horizon 2640 s.
Discrete Horizon 88
With these initial parameters and the full algorithm derived in
Eq. 8, one can to write the one to be used for identification,
y(k) =
88∑p=1
3∑j=1
[CjΨj(p)χ(k − p) + CjjΨ2l (p)χ2(k − p)
](15)
and the results of identifying the system parameters are written
in the next tables,
1) Laguerre (pole=0.978):
C1 C2 C3 C11 C22 C33
1.523 0.770 -0.577 -0.605 0.737 -0.435
2) Hermite:
C1 C2 C3 C11 C22 C33
0.04 0.06 0.01 0.03 -4 10−3 10−5
3) Chebyshev:
C1 C2 C3 C11 C22 C33
-1.40 -1.28 -0.72 -0.06 -0.31 -0.04
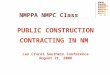
In Fig. 2 are displayed the curves of temperature for the three
families of orthogonal polynomials. The best approximation is
given by the Chebyshev polynomials.
![Page 4: [IEEE 2010 IEEE ANDESCON - Bogota, Colombia (2010.09.15-2010.09.17)] 2010 IEEE ANDESCON - Tests of hybrid Volterra-type models through NMPC schemes at a batch reactor](https://reader037.pdfslide.net/reader037/viewer/2022092816/5750a7d51a28abcf0cc40466/html5/thumbnails/4.jpg)
20
40
80
60
20
40
60
80
20
40
60
80
T E
M P
E R
A T
U R
E (
º C
)
500 1000 1500 2000 2500TIME (s)
Fig. 2. Curves of temperature (in centigrades) against time (seconds). Redcontinue lines denote the simulation. The dashed lines denote the curvesobtained from the usage of the Laguerre (top), Chebyshev (middle), andHermite (bottom) orthogonal polynomials. It is noteworthy the one derivedfrom the usage of the Chebyshev which adjusts notably to the data along thewhole initial phase between 0 and 2500 s. Curves also shows the effectivityof the usage of Volterra model as discussed in literature.
III. STRATEGY OF THE NMPC PROPOSED AND RESULTS
Normally, the system under study operates through a PID
controller together to a well tuned fuzzy logic scheme for a
determined set point. Actually, it is not coherent since the
system should control the trajectory of heating just over 2500
s. The continue line in Fig. 4 is one example of the resulting
control system under this scheme. In other words, PID seems
to be the one which would not be adequate for the control
strategy of the trajectory tracking. Therefore, a NMPC (or
another) could be an excellent control scheme for this exercise
in to find an efficient mechanism for controlling the reference
trajectory.
For the present study, one should indicate that the matrix
elements are obtained from the hybrid Volterra-type models
instead of I/O samples, as response to the applications of
steps functions.
A. The Control Algorithms
The output y(k) can be expressed in terms of the truncated
hybrid Volterra-types in the following form
y(k) =
P∑j=1
[h1jχ(k − i) + h2jχ
2(k − i)]+ e(k) (16)
where e(k) represent the identification error and P the predic-
tion horizon, χ(k) the PRMS signal input, and hij the second
order kernels.
a.- Kernels of the hybrid Volterra-type system: they are pro-
jected onto an orthogonal basis function as
h1j =
j∑r=1
[C1Ψ1(r) + C2Ψ2(r) + C3Ψ3(r)] ,
h2j =
j∑r=1
[C11Ψ21(r) + C22Ψ2
2(r) + C33Ψ23(r)
](17)
b.- Formulation of NMPC Consider the prediction horizon P ,
the control horizon M and the system output y(k) that can be
written in the predictive form as (to see Eq. 5 and Eq. 6)
y(k + n) =
n∑j=θ
h1jχ(k + n− j) +
P∑j=n+1
h1jχ(k + n− j)+
n∑j=θ
h2jχ2(k + n− j) +
P∑j=n+1
h2jχ2(k + n− j) + e(k) (18)
where θ=1 for n ≤ M and θ = n −M + 1 for M < n ≤ Pand e(k) the prediction error.
c.- Formulation of the Nonlinear Dynamical Matrix Control
(NDMC): NDMC is actually an interesting methodology to
be implemented in our analysis [5][6][8][9]. The elements
of the proposed NDMC of order 2, shall use up to three
lineal and quadratic combination of orthogonal polynomials
for describing h1j and h2j respectively.
It should be mentioned that the system horizon is given by
N=P, with the integer n ∈ [0, N ]. So that it is possible to
group the terms of y(k + n) in its matrix form as YT =[y(k)y(k + 1)...y(k +N )] as well as the χ(k+n), χ2(k+n),χ(k + n− i), and χ2(k + n− i) by
χT+ = [χ(k), χ(k + 1), ...χ(k + M − 1)]
χ2T+ =
[χ2(k − 1), χ2(k + 1), ...χ2(k + M − 1)
](19)
χT− = [χ(k − 1), χ(k − 2), ...χ(k −N )]
χ2T− =
[χ2(k − 1), χ2(k − 2), ...χ2(k −N )
], (20)
with χT+, χT
−, χ2T+ , and χ2T
− , denoting the future, past,
quadratic future, and quadratic past inputs respectively. With
these definitions, the Y can be written as
Y = Gχ+ + G2χ2+ + Hχ− + H2χ
2− + e (21)
where the G, G2, H and H2 are matrix built from the terms
of Eq. 18,
G =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
h11 0 . . 0h12 h11 . . 0. . . . .. . . . .
h1M h1,M−1 . . h11
. . . . .
. . . . .h1N h1,N−1 . . h1c
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦N×M
(22)
![Page 5: [IEEE 2010 IEEE ANDESCON - Bogota, Colombia (2010.09.15-2010.09.17)] 2010 IEEE ANDESCON - Tests of hybrid Volterra-type models through NMPC schemes at a batch reactor](https://reader037.pdfslide.net/reader037/viewer/2022092816/5750a7d51a28abcf0cc40466/html5/thumbnails/5.jpg)
and
H2 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
h22 h23 . h2N 0. . . . .. . . . .. . . . .. . . . .. . . . .
h2N 0 . . .0 0 . . 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦N×N
(23)
,
G2 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
h21 0 . . 0h22 h21 . . 0. . . . .. . . . .
h2M h2,M−1 . . h21
. . . . .
. . . . .h2N h2,N−1 . . h2c
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦N×M
(24)
and
H =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
h12 h13 . h1N 0. . . . .. . . . .. . . . .. . . . .. . . . .
h1N 0 . . .0 0 . . 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦N×N
(25)
where the relation among the matrix elements is given by
hic =
c−M+1∑j=1
hij , c ∈ [M,N ], i = (1, 2) (26)
B. Expression for the NMPC based on the control increments
on the future
For the NMPC the terms to be taken account on the
increments of control for future are χ(k) = Xχ(k − 1) +
Δχ(k). Its predictive expression for χ(k) reads χ(k + M) =χ(k−1)+
∑Mi=1
Δχ(k +M −1). As consequence the G ·χ+
from Eq. 21 can written as G ·χ+ = G ·VuΔχ+G ·VM ·χ−where Δχ = [Δχ(k)...Δχ(k−M −1)], Vu a lower triangular
matrix with Vu(i, j) = 1 for i ≥ j otherwise is null, and VM a
lower triangular matrix with VM (i, 1) = 1 for all i, otherwise
is null. Consequently, one gets a matrix form for Eq. 21 in
terms of the control increments on the future Δχ,
Y = G · Vu ·Δχ + (H + G · VM )χ−
+H2− · χ2
− + G2 ·X2+ + e (27)
� �
��
��
��
��
���
��
��
��
��
��
��
��
��
��� ��� ����
�� ������
���� ���� ���� ���� ����
���� ���� ����
���� ���� ���� ����
��
����
����
����
����
�
���
����
����
����
����
����
����
��
����
����
����
����
�
��� ���� ���� ���� ����
���
���� ���� ���� ���� �������
���� ���� ����
������ ������
Fig. 3. Simulation of control of the internal temperature in a batch reactor.Plots on the left side depict the control for a reference trajectory of typetanh(t) (blue continue lines), whereas the dashed lines are the results of thesimulation. The ones of the right side depict the input signal actuators inunits of current before of entering to the transducer (see Fig. 1). Top left andright panels describe those when the Laguerre polynomials are used in thealgorithm of Eq. 8 [7]. Those of the middle are obtained for the case of theChebishev polynomials. The ones of the bottom correspond to the case whenthe Hermite polynomials are used.
C. Cost Function and Control Law for the Proposed NMPC
To evaluate the vector Δχ it is necessary to define a cost
function which involves the error between the reference tra-
jectory and the full output, together to their future increments
of the control signal. It is traduced in the following:
[J(Δχ)] =
N∑i=1
||ek+i||2 + λ
M∑i=1
||Δχ(k + i− 1)||2 (28)
which can be expresses in its matrix form as [4]
[J(Δχ)] = [Y − Ref]T [Y − Ref] + λΔχT Δχ (29)
with λ a ponderation factor. In order to carry out the mini-
mization of J a few considerations are required: the variation
of G2 · χ2+ respect to Δχ is both dG2·χ
2
dΔχ << Ref anddG2·χ
2+
dΔχ << Vu.
With this, for the case where is free, one can approximate it to
Yf = Hvuχ−+H2χ2− where Yf the free response of system.
![Page 6: [IEEE 2010 IEEE ANDESCON - Bogota, Colombia (2010.09.15-2010.09.17)] 2010 IEEE ANDESCON - Tests of hybrid Volterra-type models through NMPC schemes at a batch reactor](https://reader037.pdfslide.net/reader037/viewer/2022092816/5750a7d51a28abcf0cc40466/html5/thumbnails/6.jpg)
� �
������������ �
�������
��
��
��
��
��
��
��
��
����
��������� ���� ���� ����
Fig. 4. Comparison between PID and NMPC schemes by showing theeffectivity of the proposed control system. Blue shaded line denotes thesimulation achieved in this work by which the Chebyshev-Volterra modelis used , whereas the continue line is derived from the plant which uses aPID controller thereby showing an evident poor performance during the initialphase.
On the other hand, in order to dJdΔX = 0
Δχ = inv(V T
u Vu + λI)V Tu (Ref − Yf ) (30)
where Ref = tanh(t) and Δχ the future increment control
vector on which the action of the control shall use the first
term.
It should be stressed that for the control law only those matrix
built from the hybrid Volterra-type models are considered,
instead of applying step functions. It constitutes the NDMC-
like version of this work.
D. Restrictions Proposed to Δχ
For the case of the reactor under study a few restrictions
are needed in order to achieve an efficient trajectory tracking
between 19 and 88 degrees, in according to the tanh(t) to be
applied to the control system. So that the imposed restrictions
are
• if Δχ < ΔχMin then Δχ = ΔχMin;
• if Δχ > ΔχMax then Δχ = ΔχMax;
• if |Y − YRef | > eMax then Δχ = Δχc;
• if |Y − YRef | < eMin then Δχ = Δχv .
It is important to underline that the Δχc and Δχv are
obtained from the experimental tests. These considerations
were important for the tuning and the achievement of the
tracking trajectory proposed. In Fig. 4, it is displayed a clear
comparison between the NMPC and PID. The evidence of
the robustness of the NMPC is manifested in the excellent
tuning of the control system. It should be noted that the tests
of identification were carried out while the reactor was under
operation of fabrication of melamine resin.
Although statistics of data is not discussed, in a future work
shall be tested the methodology used in this report to find
statistical fluctuations and their impact on the identification.
IV. CONCLUSIONS
In this report we have developed a strategy of control aimed
to monitor the heating provided to a batch reactor based on the
hybrid Volterra-type models which are shown to be sustainable
by the usage of the so-called orthogonal polynomials. In one
hand, the Volterra model has been applied to the concrete case
of system identification, where an excellent performance of the
hybrid Volterra-type models have been observed. On the other
hand, the incorporation of the Volterra models into a MPC
algorithm has been tested in conjunction to a similar DMC
scheme by showing the efficiency of the control strategy in
comparison to classical methodologies like PID (see Fig. 4).
Finally, we argue that the control strategy based on the so-
called orthogonal polynomials get its optimum performance
when the Chebyshev polynomials are used. It might to lead to
establish that those processes containing a well define initial
phase might be controlled through a NMPC based on orthog-
onal families like Chebyshev polynomials featured by only 6
parameters. In future, we shall explore the feasibility in testing
another methodologies containing only a few parameters and
therefore to be able to conclude about the robusteness of
the Volterra formalism to analyze nonlinear systems in batch
reactors.
ACKNOWLEDGMENTS
The authors of the present work would like to kindly
thank to PISOPAK PERU S.A.C where the realizations of
identification were achieved.
C. M-R is really grateful to the support from the Postgraduate
Central Office at Universidad Nacional de Ingenieria.
Finally, we are also indebted to J. Betetta-Gomez and D.
Carbonel-Olazabal whom have provided their suggestions and
valuable comments on the initial versions of the manuscript.
REFERENCES
[1] E. Camacho and C. Bordons, Model Predictive Control. Springer, London(1998).
[2] I. Sandberg Uniform approximation with doubly finite Volterra series ,Signal Processing, IEEE Transaction, 40 (1992) 1438.
[3] A Zhu and T Brazil, RF power Amplifier Behavioral Modeling Using
Volterra Expansion with Laguerre Functions Microwave SymposiumDigest, 2005, IEEE MTT-S International.
[4] R. Nowak and B. Van Veen, Nonlinear System Identification with
Pseudorandom Multilevel Excitation Sequences , Acoustics,Speech andSignal Processing 1993. ICASSP-93 1993 IEEE Int. Conf, 4 , (1993)456.
[5] Pan-yen Ho, Cheng-Ching Yu and T.P Chiang, Two Degree-of-freedom
Dynamic Matrix Control for Distilation Columns Journal of the ChineseInstitute of Eng. 16 (1993) 101.
[6] H. Hapoglu and M. Alpbaz, Experimental Application of Lin-
ear/Nonlinear Dynamic Matrix Control to a Reactor of Limestone Slurry
Titrated with Sulfuric Acid Chemical Engineering Journal, Volume 137,Issue 2, 1 April 2008, Pages 320-327
[7] A. Back and A. Chung Tsoi, Nonlinear System Identification Using
Discrete Laguerre Functions , Journal Of Systems Engineering 6 (1996)6.
[8] Cutler, C.R Ramaker, B.C. (1979), Dynamic Matrix Control-to Computer
Control Algorithm Proceeding of the 86th National Meeting of theAmerican Institute of Chemical Engineering. Houston, TX. WP5-B.
[9] P. Aadaleesa, Nitin Miglan, Rajesh Sharm and Prabirkumar Saha, Nonlin-
ear System Identification Using Wiener Type Laguerre Wavelet Network
Model Chemical Engineering Science, 63 (2008)3932